
An Optoelectronics-Based Compressive Force Sensor with Scalable Sensitivity



Abstract
1. Introduction
2. Materials and Methods
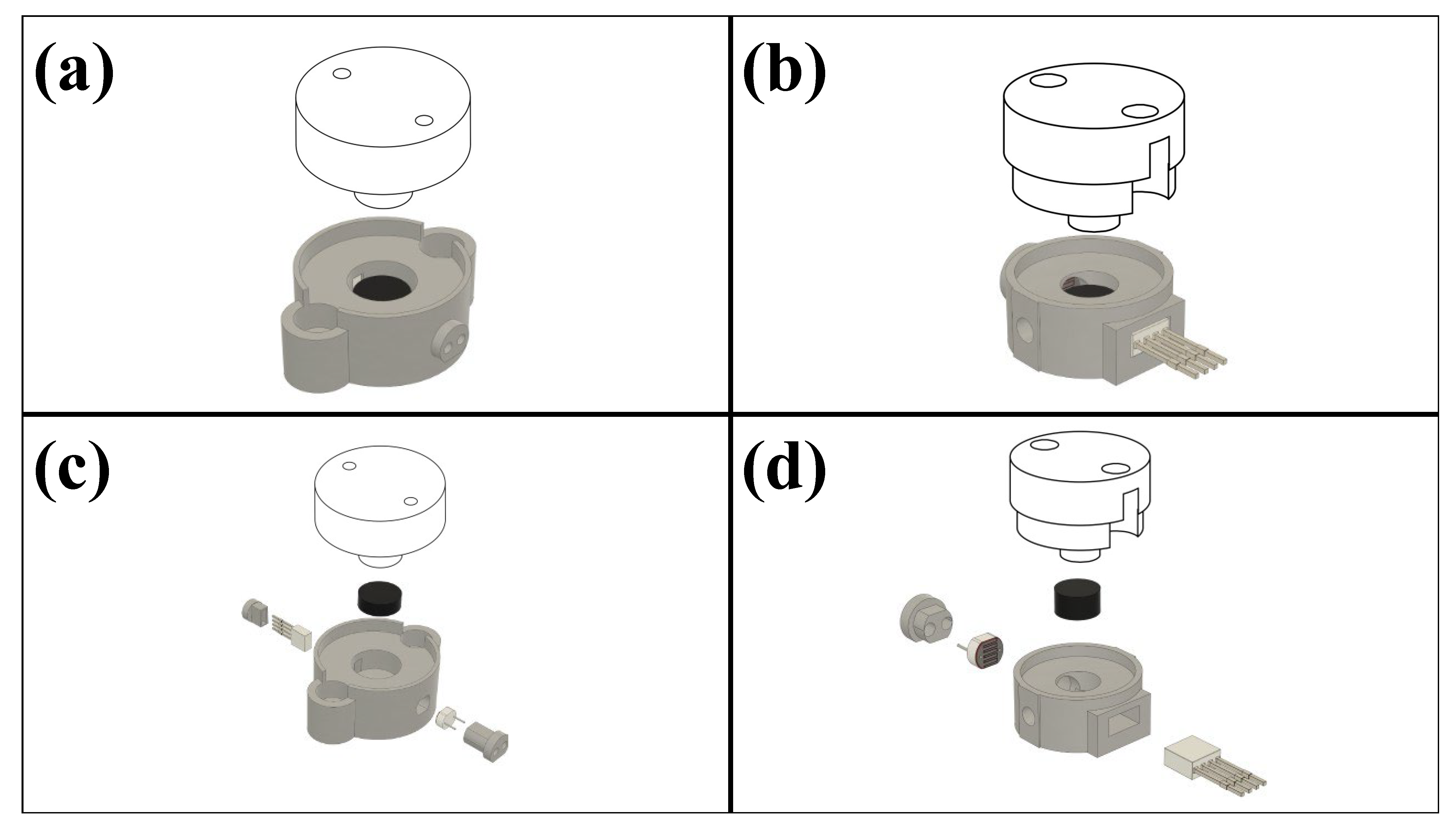
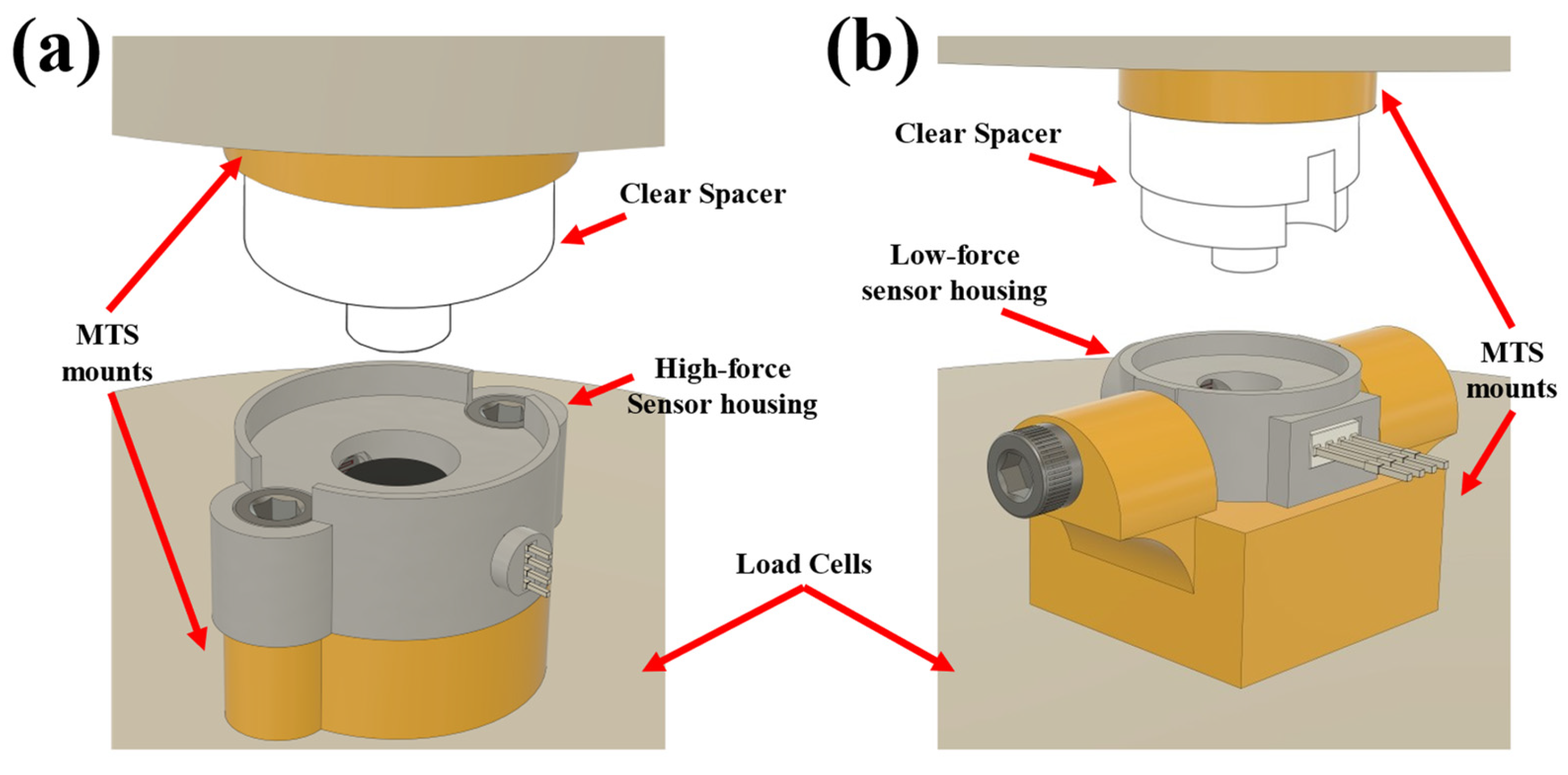
2.1. Design
2.2. Sensor Characterization
2.2.1. Elastomer Characterization Methods
2.2.2. Sensor Characterization Methods
2.3. Data Analysis
3. Results and Discussion
3.1. Material Charactization
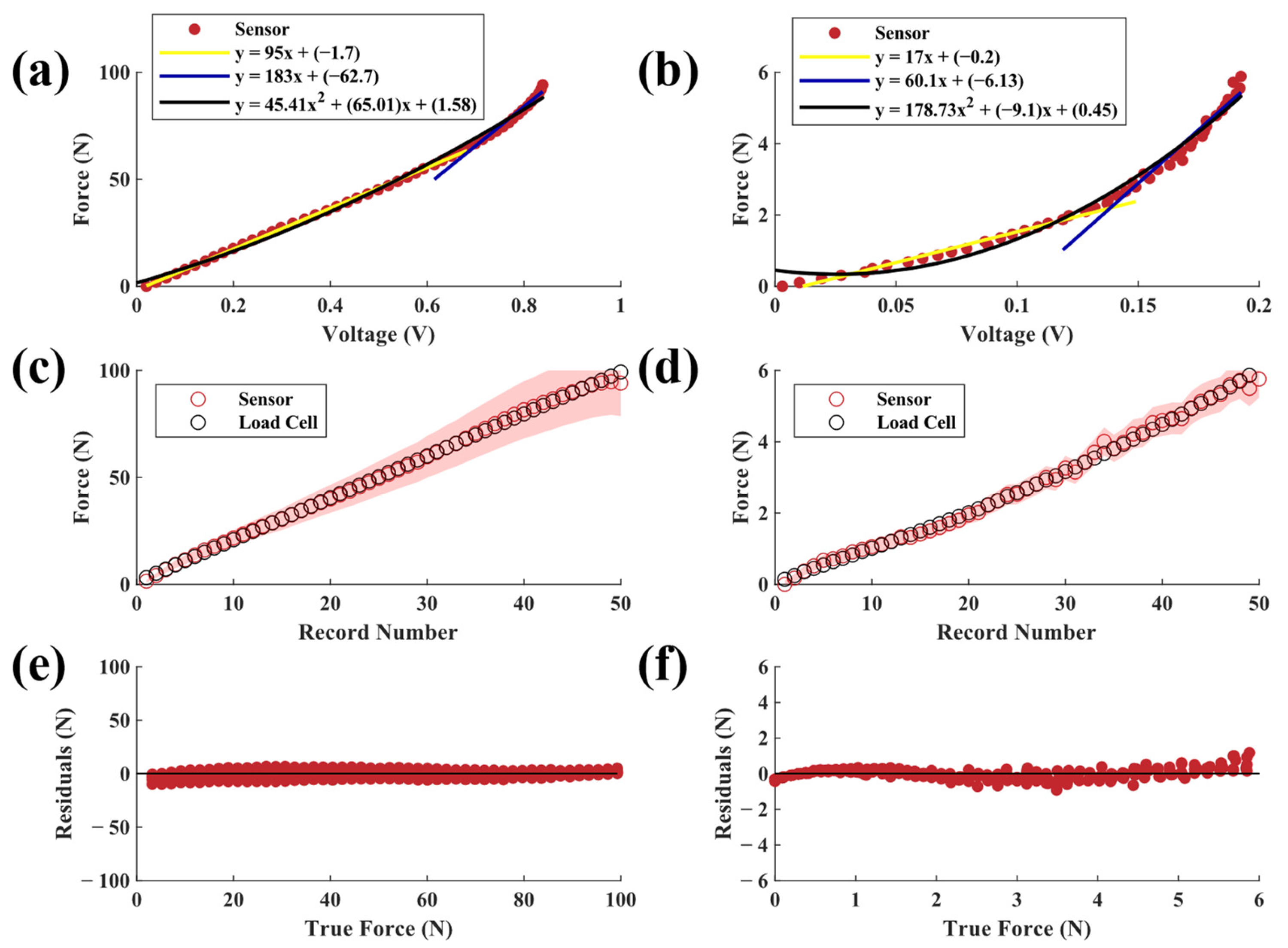
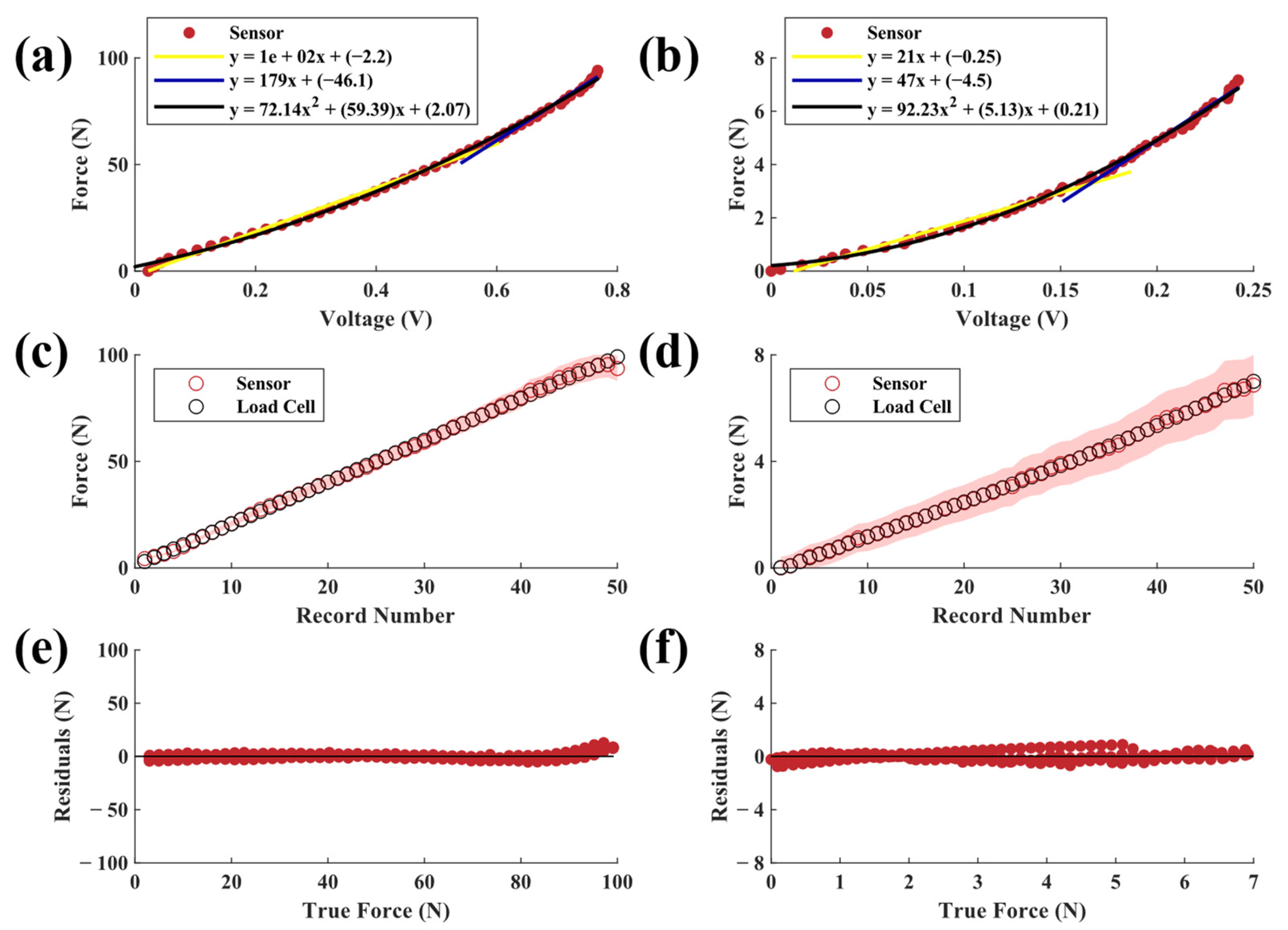
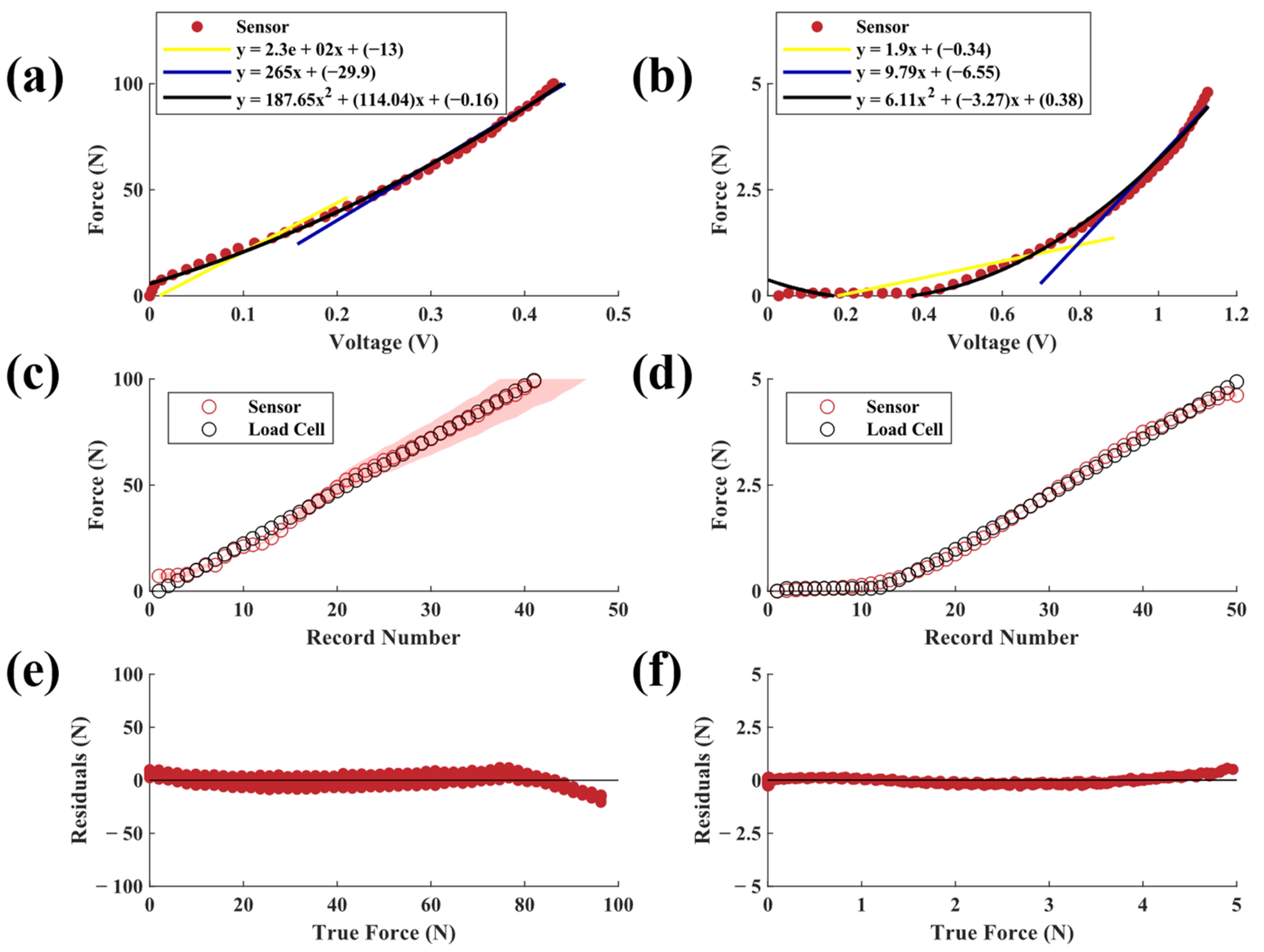
3.2. Sensor Response
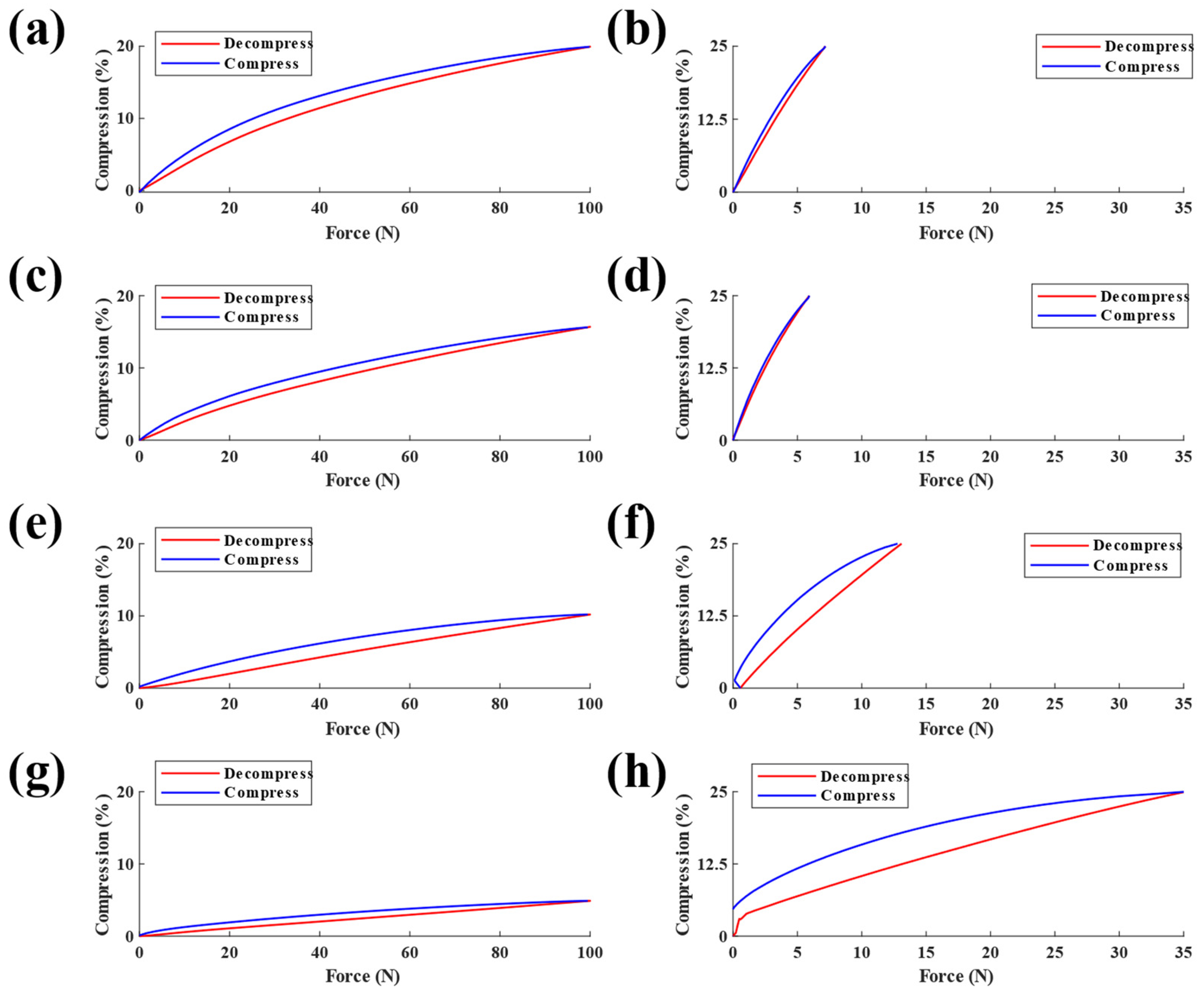
3.3. Sensor Hysteresis
3.4. Fatigue Characterization
3.5. Sensor Application
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, P.; Liu, X. Common Sensors in Industrial Robots: A Review. J. Phys. Conf. Ser. 2019, 1267, 12036. [Google Scholar] [CrossRef]
- Choudhary, H.; Vaithiyanathan, D.; Kumar, H. A Review on 3D printed force sensors. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1104, 12013. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, Y.; Li, Y.; Hao, Q. Development and Application of Resistance Strain Force Sensors. Sensors 2020, 20, 20. [Google Scholar] [CrossRef]
- Krouglicof, N.; Alonso, L.M.; Keat, W.D. Development of a mechanically coupled, six degree-of-freedom load platform for biomechanics and sports medicine. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics (IEEE Cat. No.04CH37583), The Hague, The Netherlands, 10–13 October 2004; Volume 5, pp. 4426–4431. [Google Scholar] [CrossRef]
- Nolten, U.; Kempf, H.; Mattes, U.; Mokwa, W. Force sensor clip for orthopedic applications. Procedia Eng. 2010, 5, 730–733. [Google Scholar] [CrossRef]
- Gil, B.; Power, M.; Gao, A.; Treratanakulchai, S.; Anastasova, S.; Yang, G.Z. Carbon-Nanotube-Coated 3D Microspring Force Sensor for Medical Applications. ACS Appl. Mater. Interfaces 2019, 11, 35577–35586. [Google Scholar] [CrossRef]
- Xiao, Z.G.; Menon, C. Towards the development of a wearable feedback system for monitoring the activities of the upper-extremities. J. Neuroeng. Rehabil. 2014, 11, 2. [Google Scholar] [CrossRef]
- Washif, J.A.; Kok, L.Y.; James, C.; Beaven, C.M.; Farooq, A.; Pyne, D.B.; Chamari, K. Athlete level, sport-type, and gender influences on training, mental health, and sleep during the early COVID-19 lockdown in Malaysia. Front. Physiol. 2023, 13, 2765. [Google Scholar] [CrossRef]
- Dziuba, A.; Bober, T.; Kobel-Buys, K.; Stempien, M. Integral method (IM) as a quantitative and objective method to supplement the GMFCS classification of gait in children with cerebral palsy (CP). Acta Bioeng. Biomech. 2013, 15, 105–111. [Google Scholar] [CrossRef]
- Owoeye, O.B.A.; Rauvola, R.S.; Brownson, R.C. Dissemination and implementation research in sports and exercise medicine and sports physical therapy: Translating evidence to practice and policy. BMJ Open Sport—Exerc. Med. 2020, 6, e000974. [Google Scholar] [CrossRef]
- Falch, H.N.; Rædergård, H.G.; van den Tillaar, R. Effect of Different Physical Training Forms on Change of Direction Ability: A Systematic Review and Meta-analysis. Sport. Med. Open 2019, 5, 53. [Google Scholar] [CrossRef]
- Cherubini, A.; Navarro-Alarcon, D. Sensor-Based Control for Collaborative Robots: Fundamentals, Challenges, and Opportunities. Front. Neurorobot. 2021, 14, 113. [Google Scholar] [CrossRef] [PubMed]
- Almassri, A.M.; Wan Hasan, W.Z.; Ahmad, S.A.; Ishak, A.J.; Ghazali, A.M.; Talib, D.N.; Wada, C. Pressure Sensor: State of the Art, Design, and Application for Robotic Hand. J. Sens. 2015, 2015, 846487. [Google Scholar] [CrossRef]
- Bodini, A.; Pandini, S.; Sardini, E.; Serpelloni, M. Design and fabrication of a flexible capacitive coplanar force sensor for biomedical applications. In Proceedings of the 2018 IEEE Sensors Applications Symposium (SAS), Seoul, Republic of Korea, 12–14 March 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Liu, C.-S.; Tsai, B.-J.; Chang, Y.-H. Design and Applications of Novel Enhanced-Performance Force Sensor. IEEE Sens. J. 2016, 16, 4665–4666. [Google Scholar] [CrossRef]
- Liu, T.; Inoue, Y.; Shibata, K. A Small and Low-Cost 3-D Tactile Sensor for a Wearable Force Plate. IEEE Sens. J. 2009, 9, 1103–1110. [Google Scholar] [CrossRef]
- Wanasinghe, D.; Aslani, F. A review on recent advancement of electromagnetic interference shielding novel metallic materials and processes. Compos. Part B Eng. 2019, 176, 107207. [Google Scholar] [CrossRef]
- Cheng, A.J.; Wu, L.; Sha, Z.; Chang, W.; Chu, D.; Wang, C.H.; Peng, S. Recent Advances of Capacitive Sensors: Materials, Microstructure Designs, Applications, and Opportunities. Adv. Mater. Technol. 2023, 8, 2201959. [Google Scholar] [CrossRef]
- Ku, M.; Hwang, J.C.; Oh, B.; Park, J.-U. Smart Sensing Systems Using Wearable Optoelectronics. Adv. Intell. Syst. 2020, 2, 1900144. [Google Scholar] [CrossRef]
- McGeehan, M.A.; Karipott, S.S.; Hahn, M.E.; Morgenroth, D.C.; Ong, K.G. An Optoelectronics-Based Sensor for Measuring Multi-Axial Shear Stresses. IEEE Sens. J. 2021, 21, 25641–25648. [Google Scholar] [CrossRef]
- McGeehan, M.A.; Hahn, M.E.; Karipott, S.S.; Shuaib, M.; Ong, K.G. Optical-based sensing of shear strain using reflective color patterns. Sens. Actuators A Phys. 2022, 335, 113372. [Google Scholar] [CrossRef]
- McGeehan, M.; Hahn, M.; Karipott, S.; Ong, K.G. A wearable shear force transducer based on color spectrum analysis. Meas. Sci. Technol. 2023, 34, 015106. [Google Scholar] [CrossRef]
- Hirschberg, V.; Lyu, S.; Wilhelm, M.; Rodrigue, D. Nonlinear mechanical behavior of elastomers under tension/tension fatigue deformation as determined by Fourier transform. Rheol. Acta 2021, 60, 787–801. [Google Scholar] [CrossRef]
- Schubert, E.F.; Kim, J.K.; Luo, H.; Xi, J.-Q. Solid-state lighting—A benevolent technology. Rep. Prog. Phys. 2006, 69, 3069–3099. [Google Scholar] [CrossRef]
- Crenna, F.; Rossi, G.B.; Berardengo, M. Filtering Biomechanical Signals in Movement Analysis. Sensors 2021, 21, 4580. [Google Scholar] [CrossRef] [PubMed]
- Creton, C.; Ciccotti, M. Fracture and adhesion of soft materials: A review. Rep. Prog. Phys. 2016, 79, 46601. [Google Scholar] [CrossRef]
- Akbulatov, S.; Boulatov, R. Experimental Polymer Mechanochemistry and its Interpretational Frameworks. ChemPhysChem 2017, 18, 1422–1450. [Google Scholar] [CrossRef]
- Yamaguchi, K.; Thomas, A.G.; Busfield, J.J.C. Stress relaxation, creep and set recovery of elastomers. Int. J. Non-Linear Mech. 2015, 68, 66–70. [Google Scholar] [CrossRef]
- Diani, J.; Fayolle, B.; Gilormini, P. A review on the Mullins effect. Eur. Polym. J. 2009, 45, 601–612. [Google Scholar] [CrossRef]
- Naveen, B.S.; Jose, N.T.; Krishnan, P.; Mohapatra, S.; Pendharkar, V.; Koh, N.Y.H.; Lim, W.Y.; Huang, W.M. Evolution of Shore Hardness under Uniaxial Tension/Compression in Body-Temperature Programmable Elastic Shape Memory Hybrids. Polymers 2022, 14, 4872. [Google Scholar] [CrossRef]
- Wang, Z.; Xiang, C.; Yao, X.; Le Floch, P.; Mendez, J.; Suo, Z. Stretchable materials of high toughness and low hysteresis. Proc. Natl. Acad. Sci. USA 2019, 116, 5967–5972. [Google Scholar] [CrossRef]
- Ueda, M.; Uno, H.; Takemura, H.; Mizoguchi, H. Development of Optical 3-axis Distributed Forces Sensor for Walking Analysis. In Proceedings of the SENSORS, 2007 IEEE, Atlanta, GA, USA, 28–31 October 2007; pp. 403–406. [Google Scholar] [CrossRef]
- Avellar, L.; Delgado, G.; Rocon, E.; Marques, C.; Frizera, A.; Leal-Junior, A. Polymer Optical Fiber-Embedded Force Sensor System for Assistive Devices with Dynamic Compensation. IEEE Sens. J. 2021, 21, 13255–13262. [Google Scholar] [CrossRef]
- Sylvester, A.D.; Lautzenheiser, S.G.; Kramer, P.A. Muscle forces and the demands of human walking. Biol. Open 2021, 10, bio058595. [Google Scholar] [CrossRef] [PubMed]
- Ortega, D.R.; Bíes, E.C.R.; de la Rosa, F.J.B. Analysis of the vertical ground reaction forces and temporal factors in the landing phase of a countermovement jump. J. Sport. Sci. Med. 2010, 9, 282–287. [Google Scholar]
- Yu, L.; Mei, Q.; Xiang, L.; Liu, W.; Mohamad, N.I.; István, B.; Fernandez, J.; Gu, Y. Principal Component Analysis of the Running Ground Reaction Forces with Different Speeds. Front. Bioeng. Biotechnol. 2021, 9, 629809. [Google Scholar] [CrossRef] [PubMed]
- van Oeveren, B.T.; de Ruiter, C.J.; Beek, P.J.; van Dieën, J.H. The biomechanics of running and running styles: A synthesis. Sport. Biomech. 2021, 1–39. [Google Scholar] [CrossRef] [PubMed]
- Lu, T.-W.; Chang, C.-F. Biomechanics of human movement and its clinical applications. Kaohsiung J. Med. Sci. 2012, 28 (Suppl. S2), S13–S25. [Google Scholar] [CrossRef]
- Lagakos, N.; Jarzynski, J.; Cole, J.H.; Bucaro, J.A. Frequency and temperature dependence of elastic moduli of polymers. J. Appl. Phys. 1986, 59, 4017–4031. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | Sensing Principle | Mass | Diameter | Power Source | Sensing Capacity |
|---|---|---|---|---|---|
| Present Study | Optoelectronic (Photoresistor and LED) | 7.22 g 1.96 g | 30 mm 15 mm | Wired/Wireless (30 mA) | Normal Force: 100 N 30 N |
| Bodini et al. (2018) [14] | Capacitive | * | 8.5 mm | Wired | Normal Force: 1 N |
| Liu et al. (2016) [15] | Resistance Strain Gauge (variable resistor) | * | 9.62 mm | Wired (11 mA) | Normal Force: <1 N |
| Liu et al. (2009) [16] | Pressure sensitive electric conductive rubber (PSECR) | 10g | 10 mm | Wired | Normal Force: 100 N Shear Force: 35 N |
| Ueda et al. (2007) [32] | Optical/Camera | * | 240 mm | Wired | Normal Force: 60 N |
| Avellar et al. (2021) [33] | Optoelectronic (LED and Photodetector) | * | * | Wired | Normal Force: 60 N |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pennel, Z.; McGeehan, M.; Ong, K.G. An Optoelectronics-Based Compressive Force Sensor with Scalable Sensitivity. Sensors 2023, 23, 6513. https://doi.org/10.3390/s23146513
Pennel Z, McGeehan M, Ong KG. An Optoelectronics-Based Compressive Force Sensor with Scalable Sensitivity. Sensors. 2023; 23(14):6513. https://doi.org/10.3390/s23146513
Chicago/Turabian StylePennel, Zachary, Michael McGeehan, and Keat Ghee Ong. 2023. "An Optoelectronics-Based Compressive Force Sensor with Scalable Sensitivity" Sensors 23, no. 14: 6513. https://doi.org/10.3390/s23146513
APA StylePennel, Z., McGeehan, M., & Ong, K. G. (2023). An Optoelectronics-Based Compressive Force Sensor with Scalable Sensitivity. Sensors, 23(14), 6513. https://doi.org/10.3390/s23146513