
A Survey and Tutorial on Network Optimization for Intelligent Transport System Using the Internet of Vehicles

Abstract
1. Introduction
1.1. Intelligent Transport System
1.2. Motivation
- The commercialization issues in vehicular ad hoc networks (VANET);
- Traffic issues;
- Market opportunities.
1.2.1. The Commercialization Issues in VANET
1.2.2. Traffic Issues
1.2.3. Market Opportunities
1.3. Related Work
1.4. Paper Organization
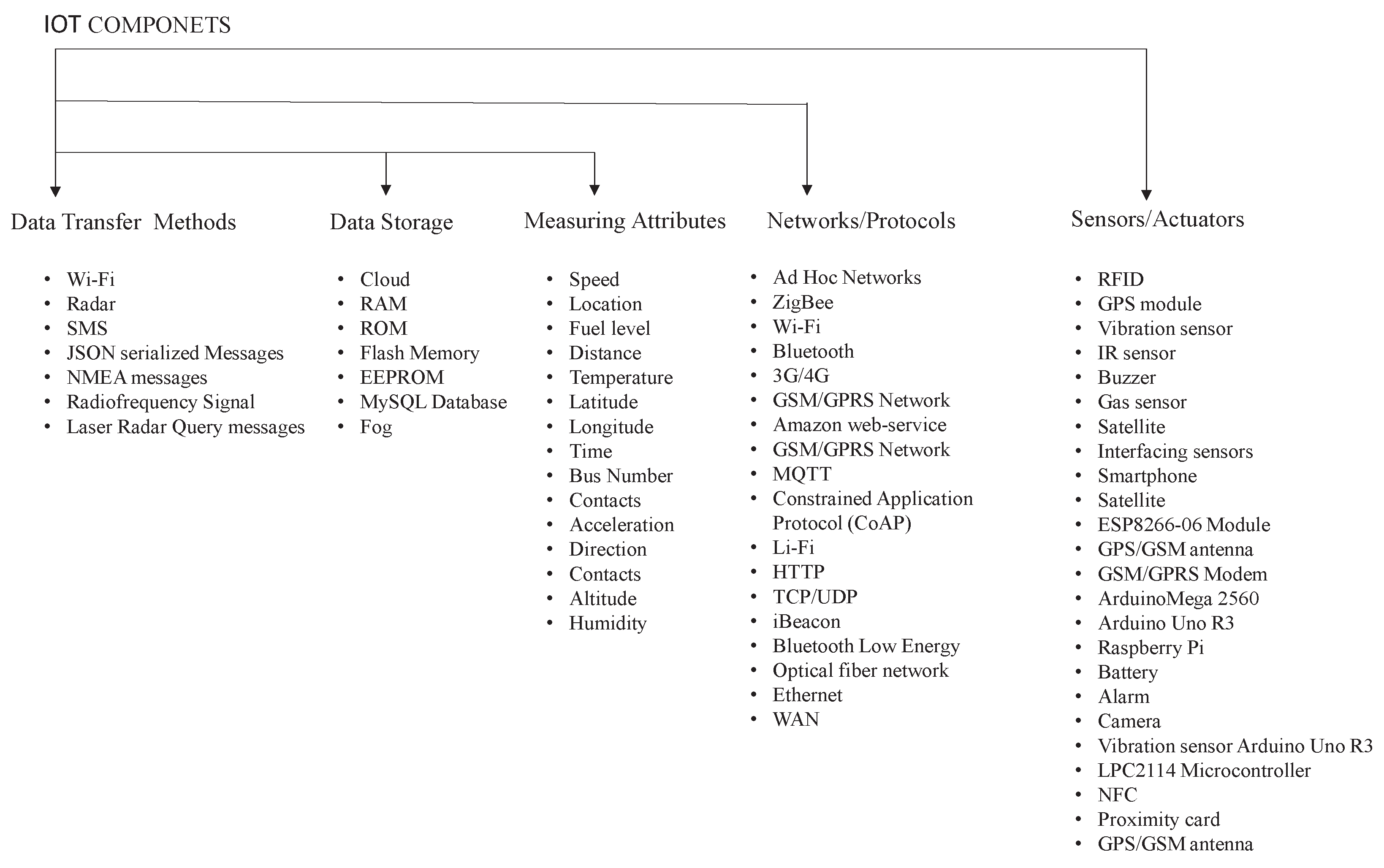
2. Background of IoT
2.1. IoT Evolution
- Allows connectivity between devices to develop smarter territories;
- Making one’s life easier and comfortable through allowing automation;
- Allows organizations to maximize efficiency and bring down costs;
- Allows firms to deal with wastage and improve the deliverance of services;
- Enables firms to develop and merge business models and improve productivity.
2.2. Difference among M2M, IoT, and IoE
2.3. IoT for Connected Vehicles
- Safety applications;
- Efficient traffic management;
- Support and infotainment applications.
2.3.1. Safety Applications
2.3.2. Efficient Traffic Management
2.3.3. Support and Infotainment Applications
3. Towards IoV
- Mobile and wireless LAN networks which are used to direct and obtain traffic data through fixed portals and WiMAX/Wi-Fi;
- Pure ad hoc, that is, between vehicular nodes and defined gateways;
- Hybrid, that is, blend of infrastructure and ad hoc networks.
- Vehicle-to-vehicle information services;
- Infrastructure and vehicle information services;
- Sensors and vehicle information services;
- RSU and vehicle information services;
- Human and vehicle information services;
- Vehicle and personal devices information services.
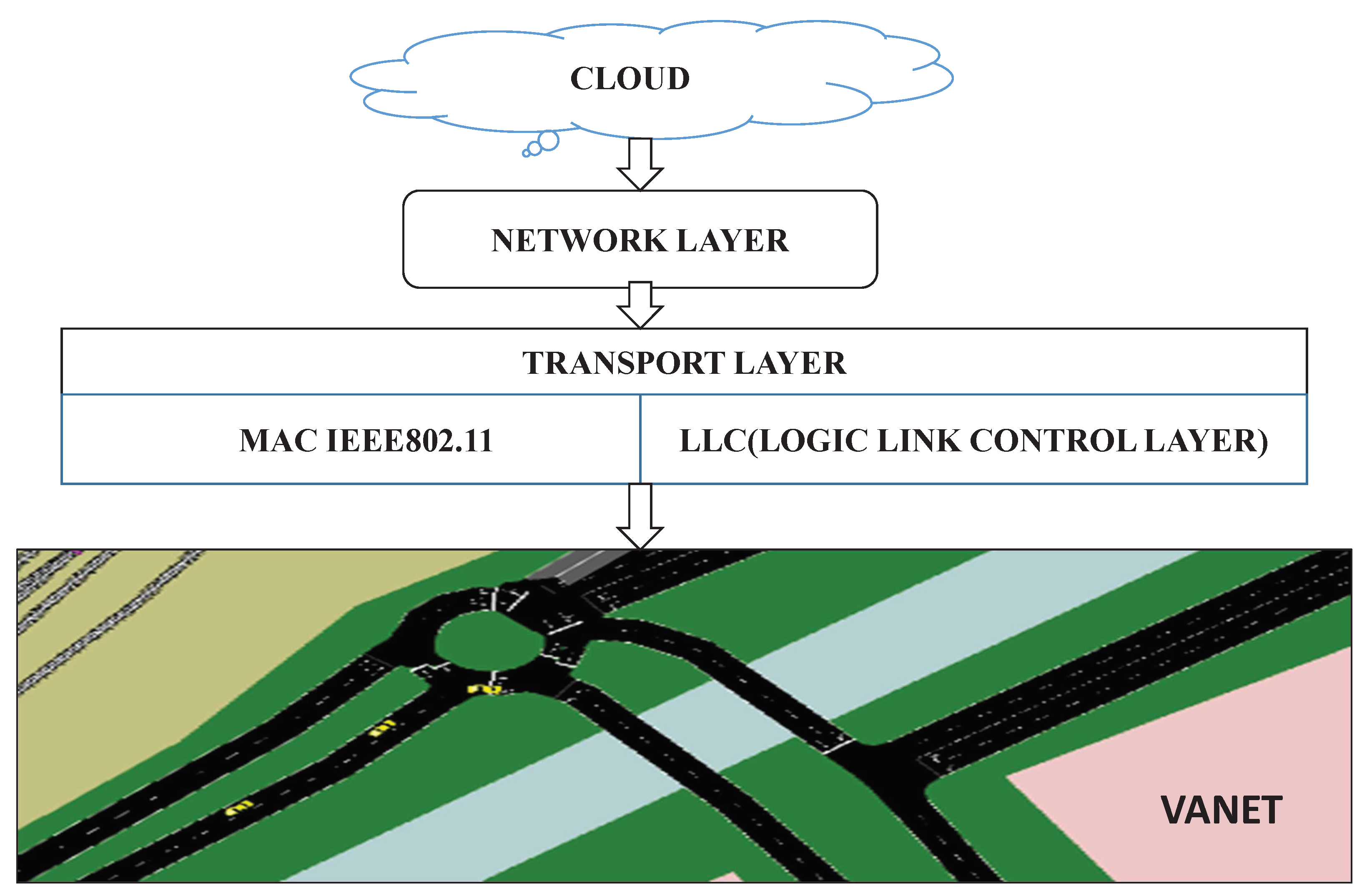
3.1. Architecture of the IoV
3.1.1. Layer 1: Perception
3.1.2. Layer 2: Networking
3.1.3. Layer 3: Application
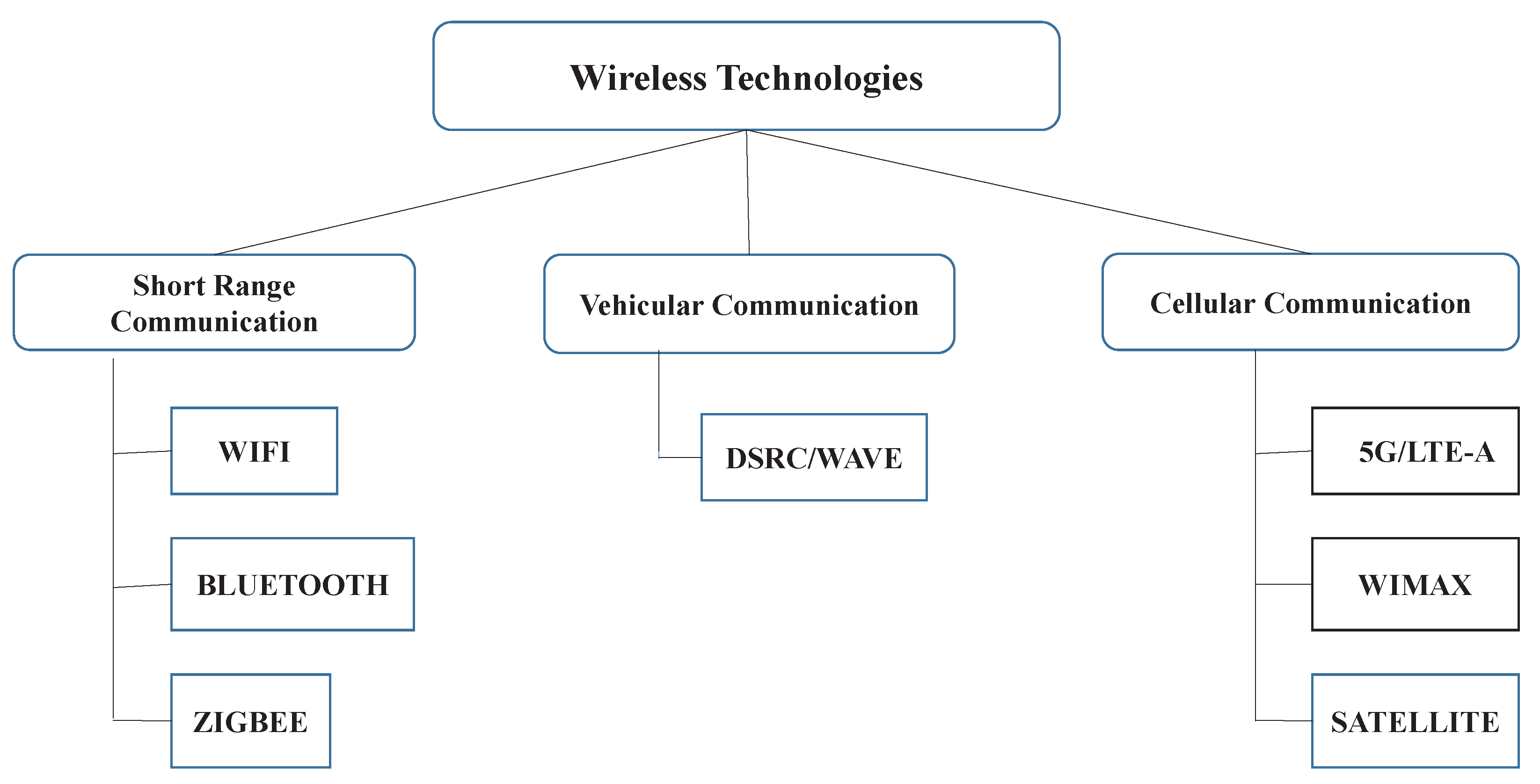
3.2. Network Protocols Used in Vehicular Networks
3.3. Routing in IoV
4. Network Optimization
4.1. Optimization Techniques
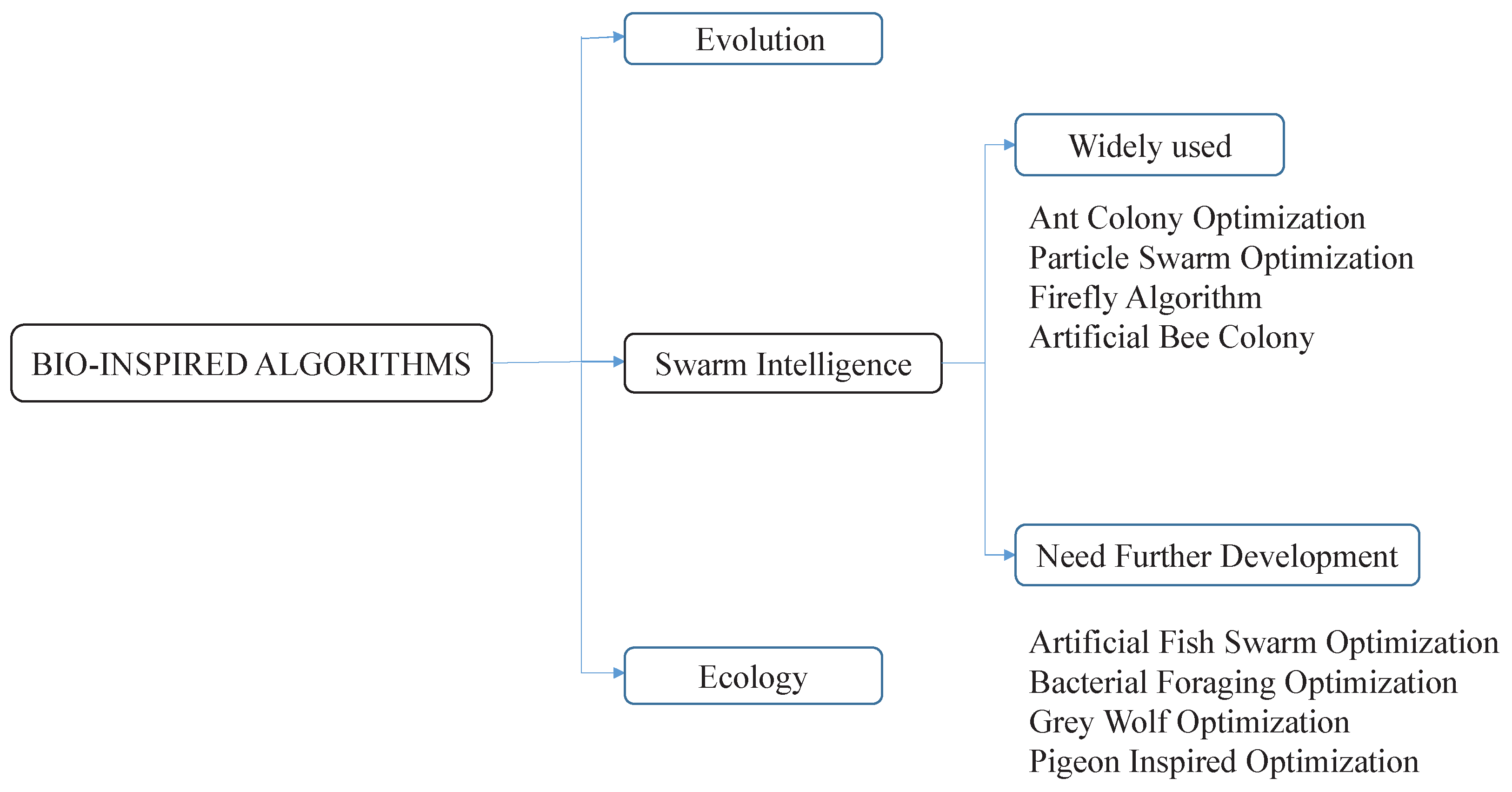
4.2. Evolutionary and Bio-Inspired Algorithms
4.2.1. Genetic Algorithms
4.2.2. Ant Colony Optimization
4.2.3. Particle Swarm Optimization
4.2.4. Artificial Bee Colony Optimization
4.2.5. Firefly Optimization
- Every firefly can be pulled in by other fireflies;
- Every firefly’s appeal is proportional to how bright the other fireflies are;
- The problem scene determines the quality of fireflies.
4.2.6. Salp Swarm Optimization
5. Modelling Environment
- Enhancing efficiency in implementation;
- Experimenting real network deployment in simulators;
- Conducting scientific examinations in this field;
- Reducing implementation and deployment cost of real network.
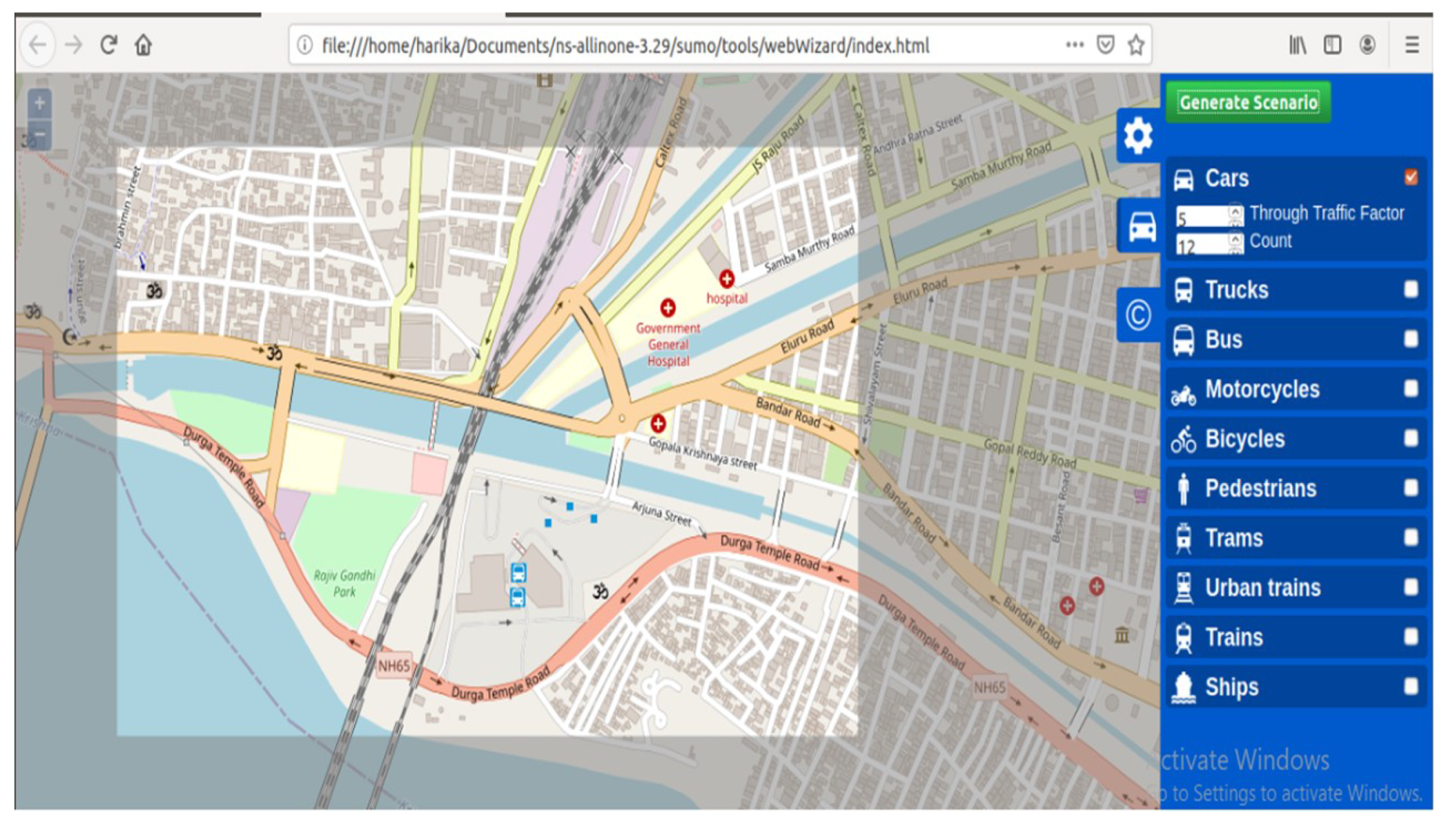
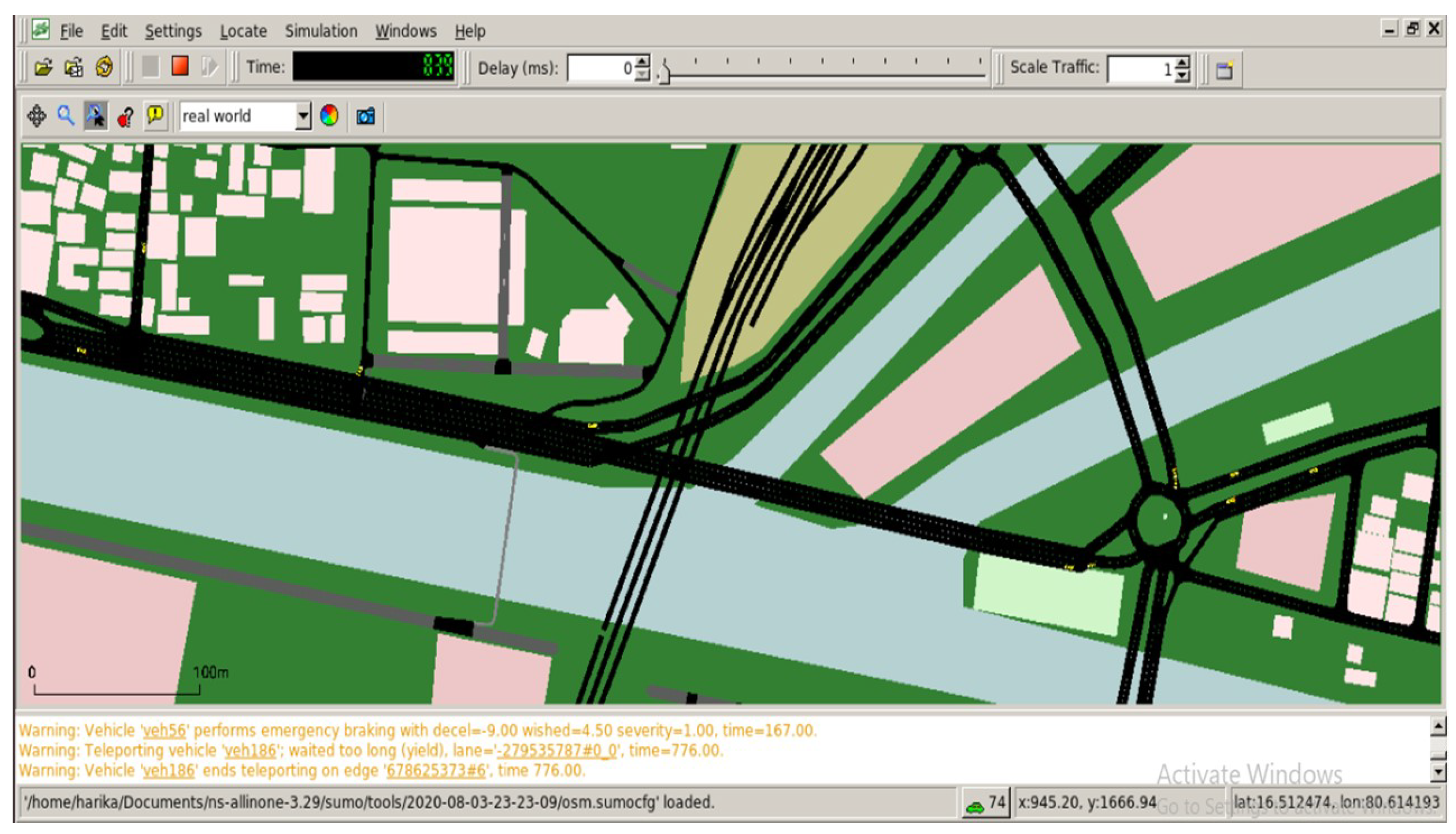
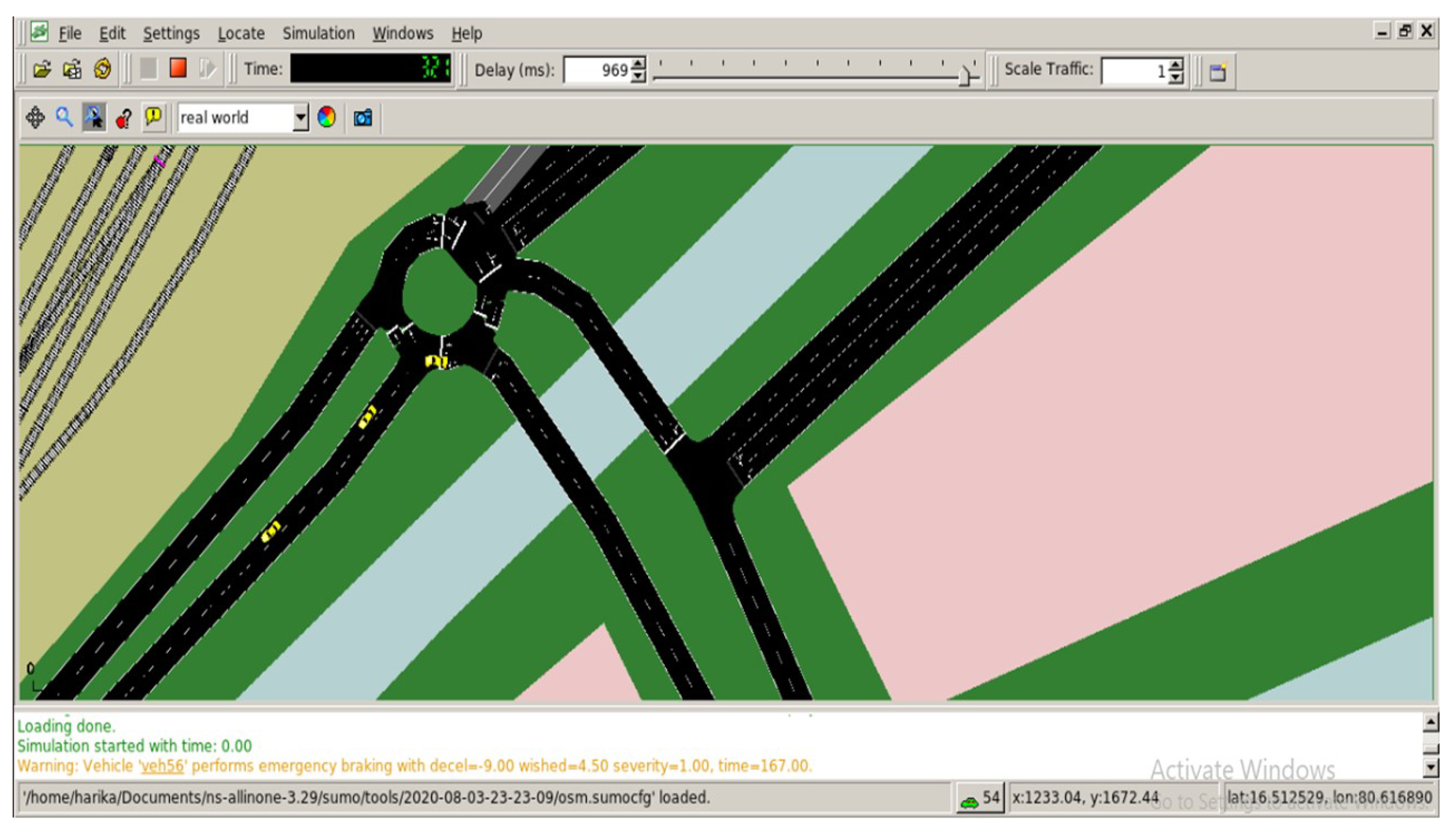
5.1. Simulation Using NS3, OSM, and SUMO
- $ export SUMO$_$HOME=/home/harika/sumo/
- $ cd sumo/tools
- $ python osmWebWizard.py
- $ sumo -c osm.sumocfg --fcd-output tracefile.xml
- $ cd
- $ cd sumo/tools
- $ python traceExporter.py -i tracefile.xml
- --ns2mobility-output=mobility.tcl
- $ cd ns-allinone-3.29/ns-3.29
- $ ./waf --run "scratch/ns2-mobility-trace --traceFile
- =/home/mobility.tcl --nodeNum=1815 --duration=100
- --logFile=ns2-mob.log"
- \#include "ns3/netanim-module.h"
- AnimationInterface anim ("vehicularmobility.xml");
- Simulator::Run()
- $ cd
- $ cd ns-allinone-3.29/netanim-3.108/
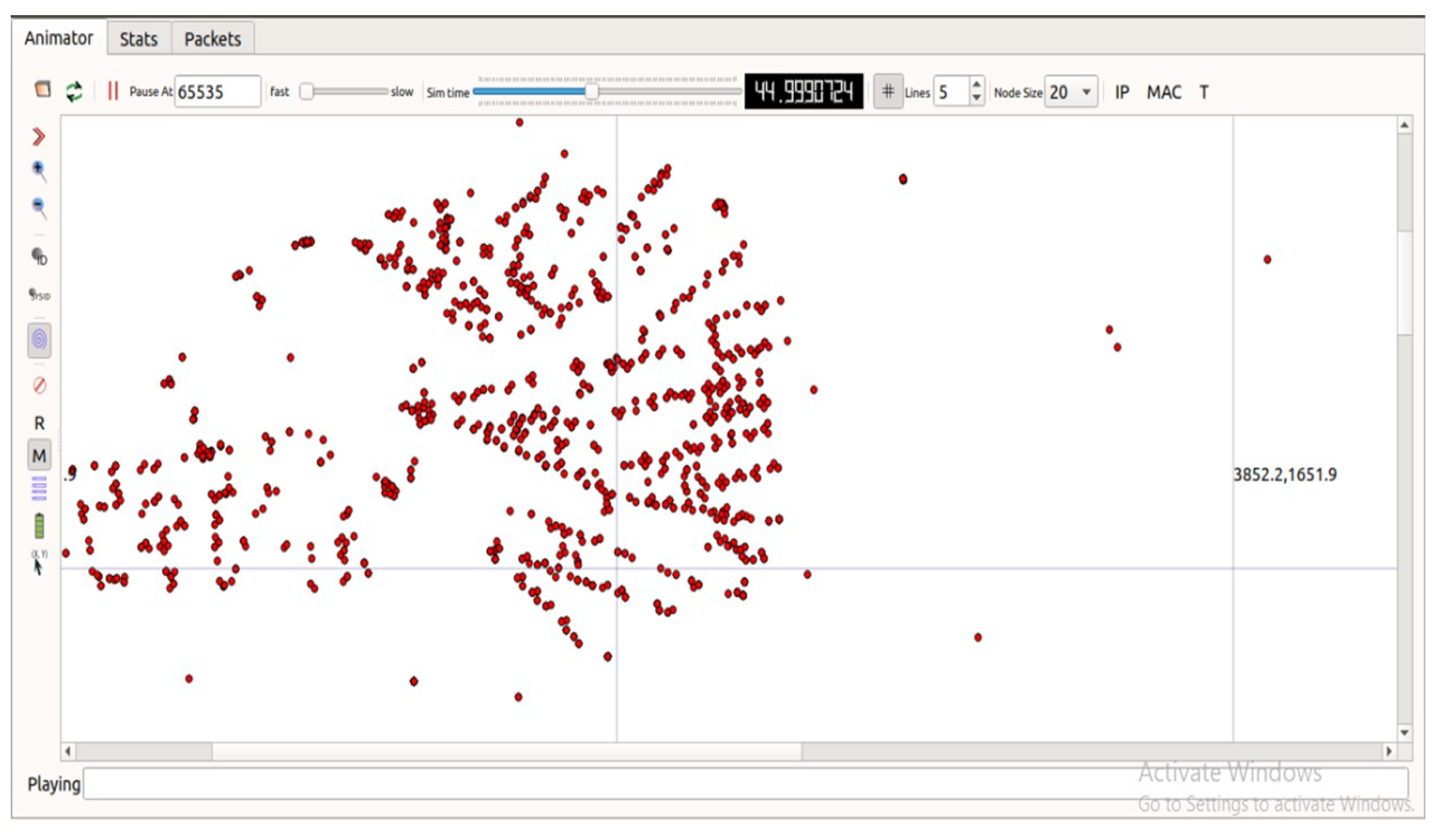
- $ ./NetAnim
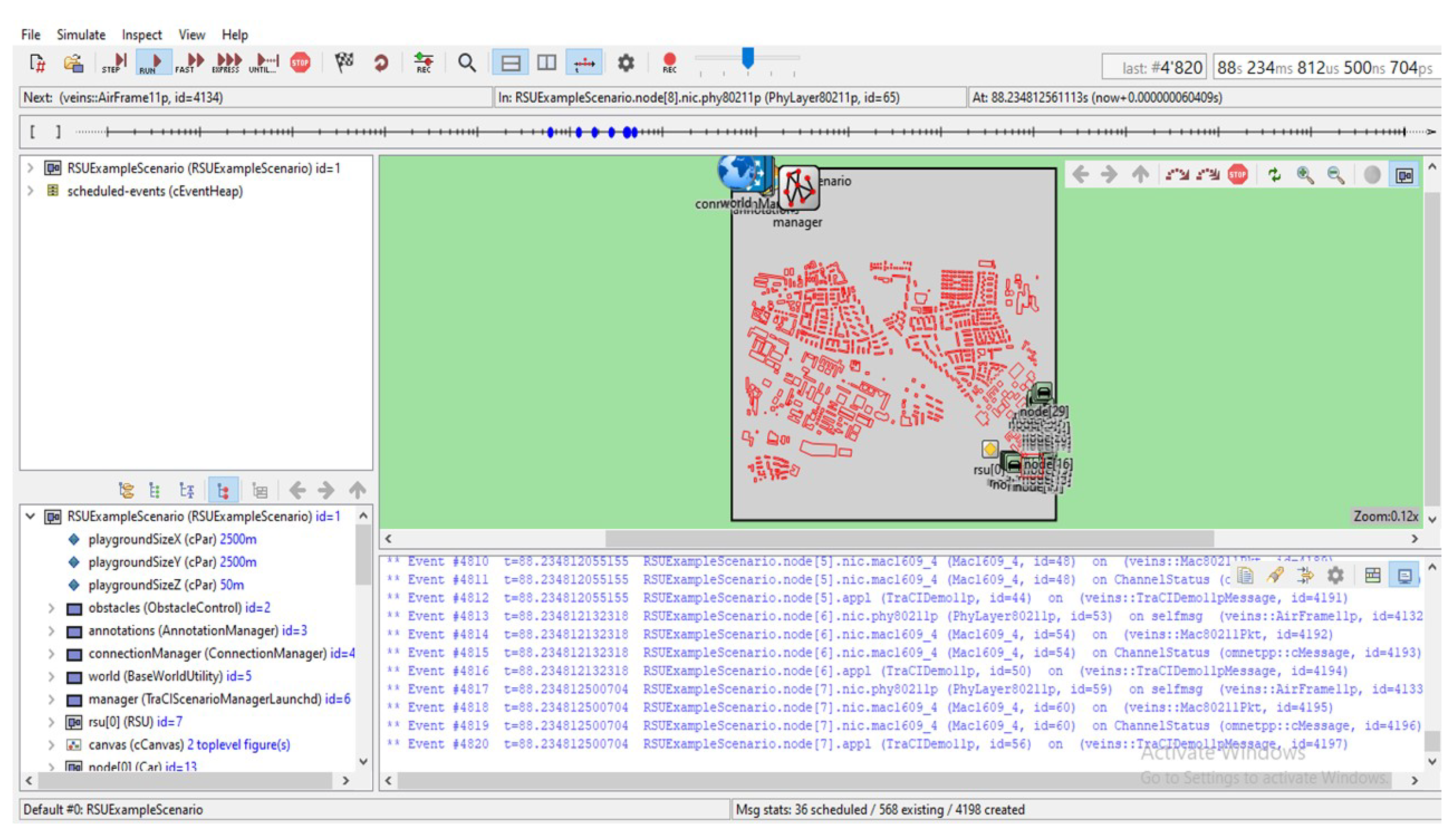
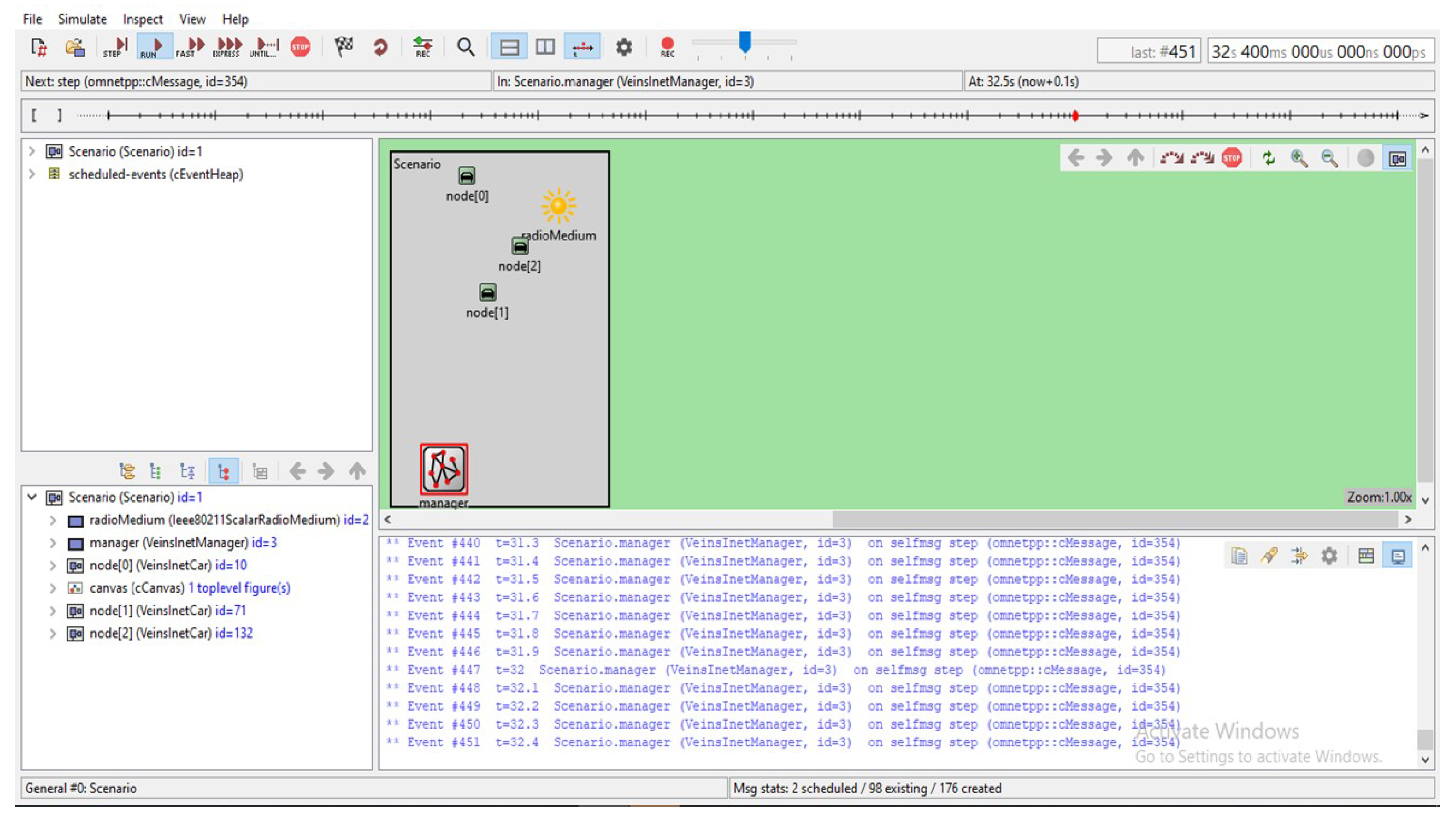
5.2. Simulation Using OMNET++, VEINS, and INET
- (i)
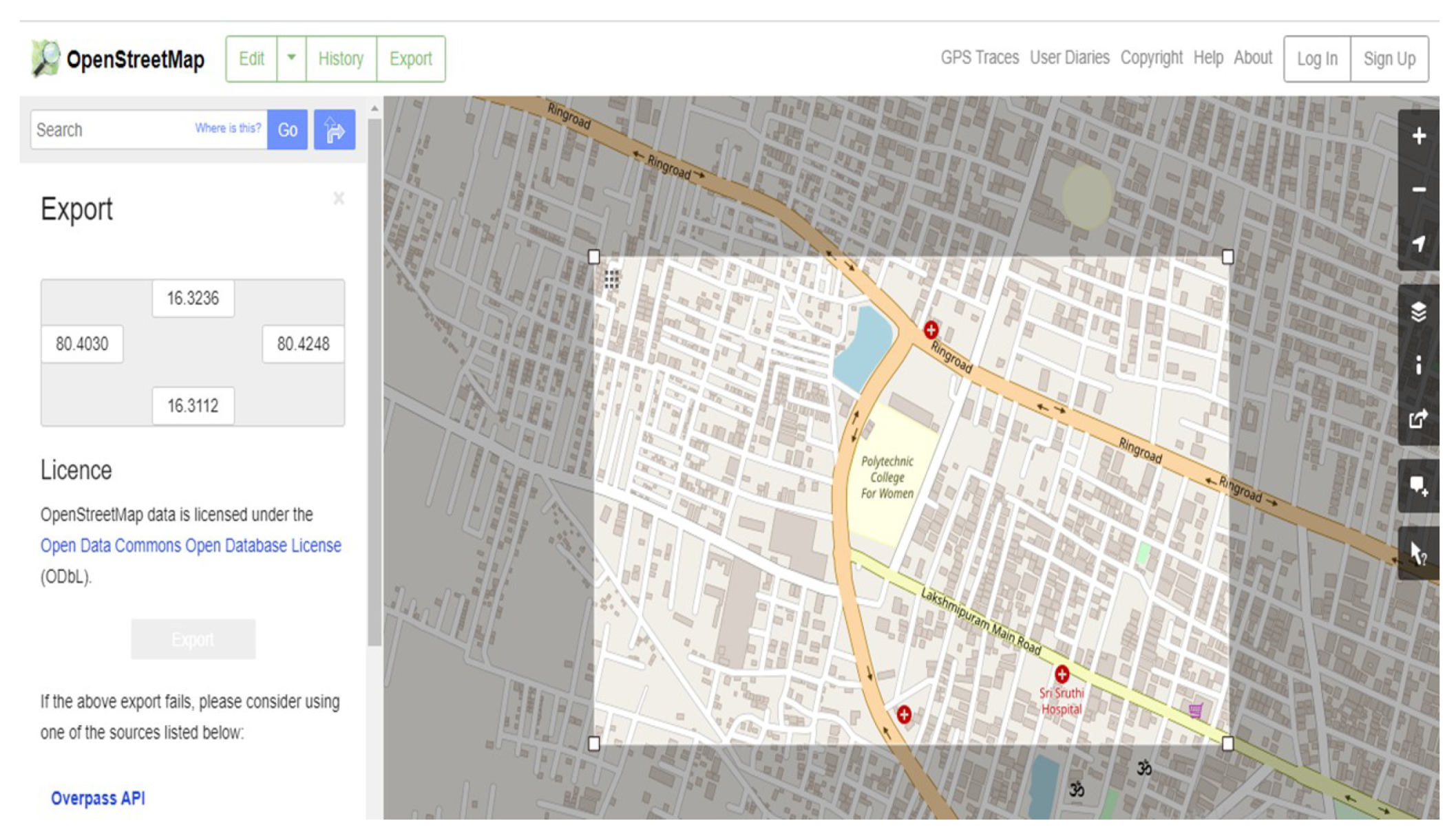
- Open www.openstreetmap.org (shown in Figure 9).
- (ii)
- Export the map by manually selecting the area, i.e., downloaded map is in .osm file.
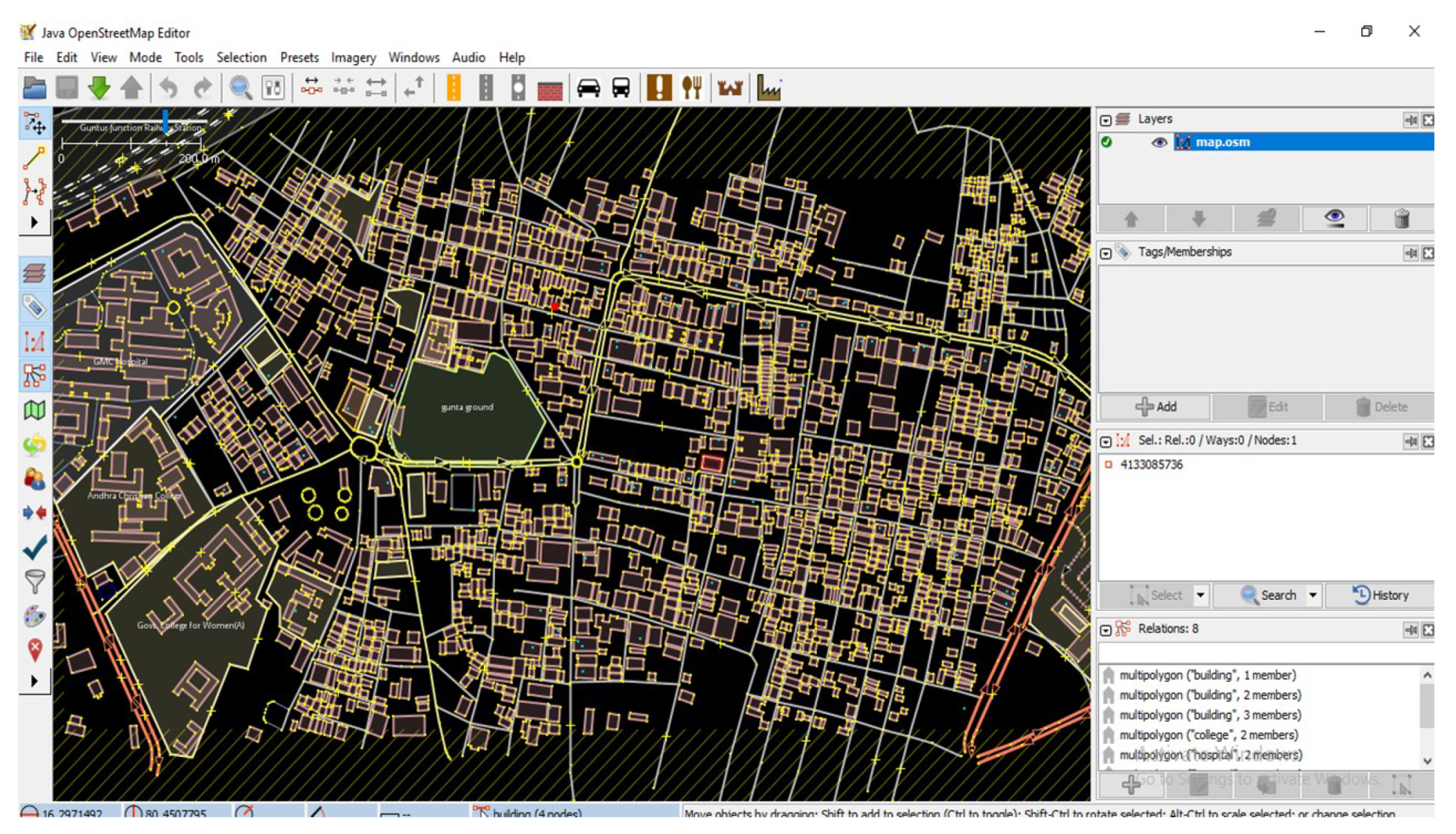
- (i)
- Open .osm file in JOSM, dataset will be rendered.
- (ii)
- Export the map by manually selecting the area, i.e., downloaded map is in .osm format.
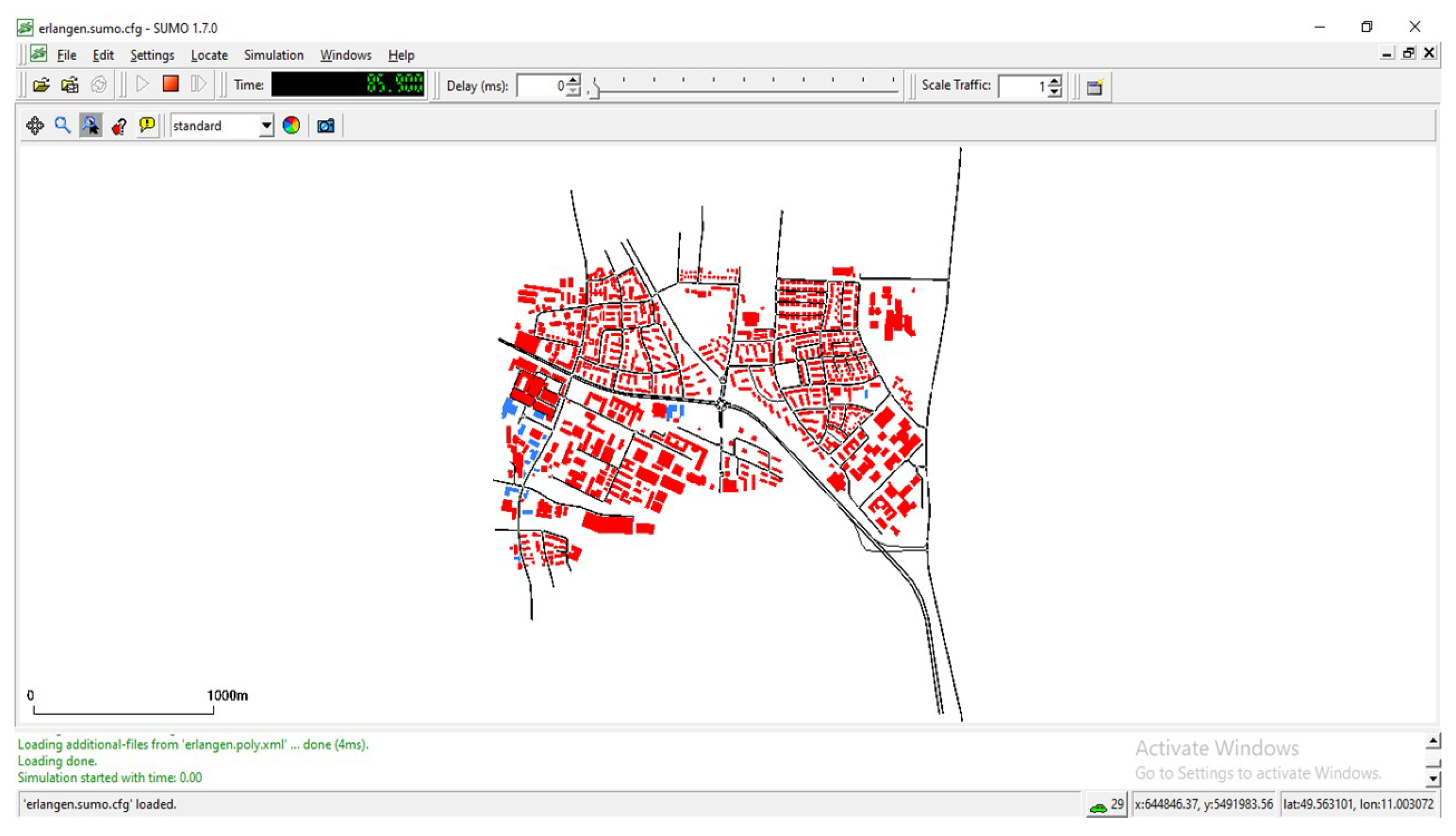
- $ netconvert --osm-file map.osm --ouput-file map.net.xml --geometry
- -remove --roundabouts.guess --ramps.guess --junctions.join
- --tls.guess-signals -tls.discard.simple --tls.join
- $ randomTrips.py -n map.net.xml -e 1000 -o map.trips.xml
- $ duarouter -n map.net.xml --route-files map.trips.xml
- -o map.rou.xml
- <configuration>
- <input>
- <net-file value="map.net.xml"/>
- <route-files value="map.rou.xml"/>
- </input>
- <time>
- <begin value="0"/>
- <end value="1000"/>
- </time>
- </configuration>
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hall, E.; Bowerman, B.; Braverman, J.; Taylor, J.; Todosow, H.; Von Wimmersperg, U. The vision of a smart city. In Proceedings of the 2nd International Life Extension Technology Workshop, Paris, France, 28 September 2000. [Google Scholar]
- Raymond, J. The Internet of Things: A study in hyper, reality, disruption and growth.US Research–Technology and Communications. In Industry Report; Raymond James Associates: St. Petersburg, FL, USA, 2014. [Google Scholar]
- Chaqfeh, M.; Lakas, A.; Jawhar, I. A survey on data dissemination in vehicular ad hoc networks. Veh. Commun. 2014, 1, 214–225. [Google Scholar] [CrossRef]
- Mahmood, Z. Connected Vehicles in the IoV Concepts, Technologies and Architectres. In Connected Vehicles in the Internet of Things; Springer: Berlin/Heidelberg, Germany, 2020; pp. 3–18. [Google Scholar]
- Top 10 Connected Car Companies Leading the Global Connected Car Market in 2019. Available online: https://blog.technavio.org/blog/top-10-connected-car-companies-leading-global-connected-car-market (accessed on 27 December 2022).
- Auto Connected Car News Vehicle to Pedestrian (V2P) and Bicycle Demoed. Available online: https://www.autoconnectedcar.com/2017/07/vehicle-to-pedestrian-V2P-and-bicycle-demoed (accessed on 27 December 2022).
- Toutouh, J.; Alba, E. Light commodity devices for building vehicular ad hoc networks: An experimental study. Ad Hoc Netw. 2016, 37, 499–511. [Google Scholar] [CrossRef]
- Bitam, S.; Batouche, M.; Talbi, E.g. A survey on bee colony algorithms. In Proceedings of the IEEE International Symposium on Parallel & Distributed Processing, Workshops and Phd Forum Ipdpsw, Atlanta, GA, USA, 19–23 April 2010; pp. 1–8. [Google Scholar]
- Barbaresso, J.; Cordahi, G.; Garcia, D.; Hill, C.; Jendzejec, A.; Wright, K.; Hamilton, B.A. USDOT’s Intelligent Transportation Systems ITS ITS Strategic Plan; Technical Report; United States, Department of Transportation, Intelligent Transportation: Washington, DC, USA, 2014.
- The International Road Assessment Programme (iRAP). 2013 iRAP Factsheet—The Global Cost of Road Crashes. Available online: https://resources.irap.org/Research/2013_iRAP_paper-the_global_cost_of_road_crashes.pdf (accessed on 31 December 2022).
- World Health Organization. Global Status Report on Road Safety. Available online: https://www.afro.who.int/publications/global-status-report-road-safety-2015 (accessed on 27 December 2022).
- Saini, M.; Alelaiwi, A.; Saddik, A.E. How close are we to realizing a pragmatic VANET solution? A meta-survey. ACM Comput. Surv. (CSUR) 2015, 48, 1–40. [Google Scholar] [CrossRef]
- Hasan, S.F.; Ding, X.; Siddique, N.H.; Chakraborty, S. Measuring disruption in vehicular communications. IEEE Trans. Veh. Technol. 2010, 60, 148–159. [Google Scholar] [CrossRef]
- Gubbi, J.; Buyya, R.; Marusic, S.; Palaniswami, M. Internet of Things IoT: A vision, architectural elements, and future directions. Future Gener. Comput. Syst. 2013, 29, 1645–1660. [Google Scholar] [CrossRef]
- Sun, Y.; Song, H.; Jara, A.J.; Bie, R. Internet of things and big data analytics for smart and connected communities. IEEE Access 2016, 4, 766–773. [Google Scholar] [CrossRef]
- McKinsey & Company. The Road to 2020 and Beyond—What’s Driving the Global Automotive Industry. Available online: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/the-road-to-2020-and-beyond-whats-driving-the-global-automotive-industry (accessed on 27 December 2022).
- Aslam, B.; Wang, P.; Zou, C.C. Extension of internet access to VANET via satellite receive–only terminals. Int. J. Ad Hoc Ubiquitous Comput. 2013, 14, 172–190. [Google Scholar] [CrossRef]
- Sperling, D. Future Drive: Electric Vehicles and Sustainable Transportation; Island Press: Washington, DC, USA, 2013. [Google Scholar]
- McKinsey & Company. Unlocking the Potential of the Internet of Things. Available online: https://www.mckinsey.com/capabilities/mckinsey-digital/our-insights/the-internet-of-things-the-value-of-digitizing-the-physical-world (accessed on 27 December 2022).
- Cheng, J.; Cheng, J.; Zhou, M.; Liu, F.; Gao, S.; Liu, C. Routing in internet of vehicles: A review. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2339–2352. [Google Scholar] [CrossRef]
- Tuyisenge, L.; Ayaida, M.; Tohme, S.; Afilal, L.E. Network architectures in internet of vehicles (IoV): Review, protocols analysis, challenges and issues. In Proceedings of the International Conference on Internet of Vehicles; Springer: Cham, Switzerland, 2018; pp. 3–13. [Google Scholar]
- Hussain, S.A.; Yusof, K.M.; Hussain, S.M.; Singh, A.V. A review of quality of service issues in Internet of Vehicles (IoV). In Proceedings of the 2019 Amity International Conference on Artificial Intelligence (AICAI), Dubai, United Arab Emirates, 4–6 February 2019; pp. 380–383. [Google Scholar]
- Ji, B.; Zhang, X.; Mumtaz, S.; Han, C.; Li, C.; Wen, H.; Wang, D. Survey on the internet of vehicles: Network architectures and applications. IEEE Commun. Stand. Mag. 2020, 4, 34–41. [Google Scholar] [CrossRef]
- Mollah, M.B.; Zhao, J.; Niyato, D.; Guan, Y.L.; Yuen, C.; Sun, S.; Lam, K.Y.; Koh, L.H. Blockchain for the Internet of Vehicles Towards Intelligent Transportation Systems: A Survey. IEEE Internet Things J 2020, 8, 4157–4185. [Google Scholar] [CrossRef]
- Xu, X.; Li, H.; Xu, W.; Liu, Z.; Yao, L.; Dai, F. Artificial intelligence for edge service optimization in internet of vehicles: A survey. Tsinghua Sci. Technol. 2021, 27, 270–287. [Google Scholar] [CrossRef]
- Kayarga, T.; Kumar, S.A. A study on various technologies to solve the routing problem in Internet of Vehicles (IoV). Wirel. Pers. Commun. 2021, 119, 459–487. [Google Scholar] [CrossRef]
- Ksouri, C.; Jemili, I.; Mosbah, M.; Belghith, A. Towards general Internet of Vehicles networking: Routing protocols survey. Concurr. Comput. Pract. Exp. 2022, 34, e5994. [Google Scholar] [CrossRef]
- Bandyopadhyay, D.; Sen, J. Internet of things: Applications and challenges in technology and standardization. Wirel. Pers. Commun. 2011, 58, 49–69. [Google Scholar] [CrossRef]
- Piyare, R.; Lee, S.R. Towards internet of things (IOTs): Integration of wireless sensor network to cloud services for data collection and sharing. arXiv 2013, arXiv:1310.2095. [Google Scholar] [CrossRef]
- De la Iglesia, I.; Hernandez-Jayo, U.; Osaba, E.; Carballedo, R. Smart bandwidth assignation in an underlay cellular network for internet of vehicles. Sensors 2017, 17, 2217. [Google Scholar] [CrossRef]
- Eze, J.; Zhang, S.; Liu, E.; Eze, E. Design optimization of resource allocation in OFDMA-based cognitive radio-enabled Internet of Vehicles (IoVs). Sensors 2020, 20, 6402. [Google Scholar] [CrossRef]
- Kim, D.Y.; Jung, M.; Kim, S. An internet of vehicles (IoV) access gateway design considering the efficiency of the in-vehicle ethernet backbone. Sensors 2020, 21, 98. [Google Scholar] [CrossRef]
- Qafzezi, E.; Bylykbashi, K.; Ampririt, P.; Ikeda, M.; Matsuo, K.; Barolli, L. An Intelligent Approach for Cloud-Fog-Edge Computing SDN-VANETs Based on Fuzzy Logic: Effect of Different Parameters on Coordination and Management of Resources. Sensors 2022, 22, 878. [Google Scholar] [CrossRef]
- DeNardis, L. The Internet in Everything; Yale University Press: New Haven, CT, USA, 2020. [Google Scholar]
- Guk, K.; Han, G.; Lim, J.; Jeong, K.; Kang, T.; Lim, E.K.; Jung, J. Evolution of wearable devices with real-time disease monitoring for personalized healthcare. Nanomaterials 2019, 9, 813. [Google Scholar] [CrossRef]
- Khasawneh, A.M.; Helou, M.A.; Khatri, A.; Aggarwal, G.; Kaiwartya, O.; Altalhi, M.; Abu-Ulbeh, W.; AlShboul, R. Service-centric heterogeneous vehicular network modeling for connected traffic environments. Sensors 2022, 22, 1247. [Google Scholar] [CrossRef] [PubMed]
- Rawashdeh, Z.Y.; Mahmud, S.M. Intersection collision avoidance system architecture. In Proceedings of the 2008 5th IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 10–12 January 2008; pp. 493–494. [Google Scholar]
- Florin, R.; Olariu, S. A survey of vehicular communications for traffic signal optimization. Veh. Commun. 2015, 2, 70–79. [Google Scholar] [CrossRef]
- Van Hoek, R.; Ploeg, J.; Nijmeijer, H. Cooperative driving of automated vehicles using B-splines for trajectory planning. IEEE Trans. Intell. Veh. 2021, 6, 594–604. [Google Scholar] [CrossRef]
- Zlocki, A.; König, A.; Bock, J.; Weber, H.; Muslim, H.; Nakamura, H.; Watanabe, S.; Antona-Makoshi, J.; Taniguchi, S. Logical Scenarios Parameterization for Automated Vehicle Safety Assessment: Comparison of Deceleration and Cut-In Scenarios From Japanese and German Highways. IEEE Access 2022, 10, 26817–26829. [Google Scholar] [CrossRef]
- Widner, A.; Tihanyi, V.; Tettamanti, T. Framework for Vehicle Dynamics Model Validation. IEEE Access 2022, 10, 35422–35436. [Google Scholar] [CrossRef]
- Cao, W.; Zhu, Z.; Nan, J.; Yang, Q.; Gu, G.; He, H. An Improved Motion Control With Cyber-Physical Uncertainty Tolerance for Distributed Drive Electric Vehicle. IEEE Access 2021, 10, 770–778. [Google Scholar] [CrossRef]
- Wan, J.; Liu, J.; Shao, Z.; Vasilakos, A.V.; Imran, M.; Zhou, K. Mobile crowd sensing for traffic prediction in internet of vehicles. Sensors 2016, 16, 88. [Google Scholar] [CrossRef]
- Nouh, R.; Singh, M.; Singh, D. SafeDrive: Hybrid recommendation system architecture for early safety predication using Internet of Vehicles. Sensors 2021, 21, 3893. [Google Scholar] [CrossRef]
- Engoulou, R.G.; Bellaïche, M.; Pierre, S.; Quintero, A. VANET security surveys. Comput. Commun. 2014, 44, 1–13. [Google Scholar] [CrossRef]
- Genser, A.; Hautle, N.; Makridis, M.; Kouvelas, A. An experimental urban case study with various data sources and a model for traffic estimation. Sensors 2021, 22, 144. [Google Scholar] [CrossRef]
- Da Cunha, F.D.; Boukerche, A.; Villas, L.; Viana, A.C.; Loureiro, A.A. Data communication in VANETs: A survey, challenges and applications. In IEEE Communications Surveys and Tutorials; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]
- Nadeem, T.; Dashtinezhad, S.; Liao, C.; Iftode, L. TrafficView: Traffic data dissemination using car-to-car communication. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2004, 8, 6–19. [Google Scholar] [CrossRef]
- Chen, X.; Xu, B.; Qin, X.; Bian, Y.; Hu, M.; Sun, N. Non-signalized intersection network management with connected and automated vehicles. IEEE Access 2020, 8, 122065–122077. [Google Scholar] [CrossRef]
- Liu, Y.; Luo, Z.; Liu, Z.; Shi, J.; Cheng, G. Cooperative routing problem for ground vehicle and unmanned aerial vehicle: The application on intelligence, surveillance, and reconnaissance missions. IEEE Access 2019, 7, 63504–63518. [Google Scholar] [CrossRef]
- Niu, Z.; Shen, X.S.; Zhang, Q.; Tang, Y. Space-air-ground integrated vehicular network for connected and automated vehicles: Challenges and solutions. Intell. Converg. Netw. 2020, 1, 142–169. [Google Scholar] [CrossRef]
- Ahn, S.; Choi, J. Internet of vehicles and cost-effective traffic signal control. Sensors 2019, 19, 1275. [Google Scholar] [CrossRef]
- Bhoi, S.K.; Khilar, P.M. VehiHealth: An emergency routing protocol for vehicular Ad Hoc network to support healthcare system. J. Med Syst. 2016, 40, 65. [Google Scholar] [CrossRef]
- Nandan, A.; Das, S.; Pau, G.; Gerla, M.; Sanadidi, M. Co-operative downloading in vehicular ad-hoc wireless networks. In Proceedings of the Second Annual Conference on Wireless On-demand Network Systems and Services, St. Moritz, Switzerland, 19–21 January 2005; pp. 32–41. [Google Scholar]
- Marfiay, G.; Pau, G.; Roccetti, M. On Developing smart applications for VANETs: Where are we now? Some insights on technical issues and open problems. In Proceedings of the 2009 International Conference on Ultra Modern Telecommunications & Workshops, St. Petersburg, Russia, 12–14 October 2009; pp. 1–6. [Google Scholar]
- Ghandriz, T.; Jacobson, B.; Nilsson, P.; Laine, L.; Fröjd, N. Computationally efficient nonlinear one-and two-track models for multitrailer road vehicles. IEEE Access 2020, 8, 203854–203875. [Google Scholar] [CrossRef]
- Xin, Q.; Alazab, M.; Crespo, R.G.; Montenegro-Marin, C.E. AI-based quality of service optimization for multimedia transmission on Internet of Vehicles (IoV) systems. Sustain. Energy Technol. Assess. 2022, 52, 102055. [Google Scholar] [CrossRef]
- Musa, S.S.; Zennaro, M.; Libsie, M.; Pietrosemoli, E. Mobility-aware proactive edge caching optimization scheme in information-centric iov networks. Sensors 2022, 22, 1387. [Google Scholar] [CrossRef]
- Frodigh, M.; Johansson, P.; Larsson, P. Wireless ad hoc networking: The art of networking without a network. Ericsson Rev. 2000, 4, 249. [Google Scholar]
- Raza, N.; Aftab, M.U.; Akbar, M.Q.; Ashraf, O.; Irfan, M. Mobile ad-hoc networks applications and its challenges. Commun. Netw. 2016, 8, 131–136. [Google Scholar] [CrossRef]
- Guerna, A.; Bitam, S.; Calafate, C.T. Roadside unit deployment in internet of vehicles systems: A survey. Sensors 2022, 22, 3190. [Google Scholar] [CrossRef] [PubMed]
- Raza, S.; Wang, S.; Ahmed, M.; Anwar, M.R. A survey on vehicular edge computing: Architecture, applications, technical issues, and future directions. Wirel. Commun. Mob. Comput. 2019, 2019, 3159762. [Google Scholar] [CrossRef]
- Cui, G.; Zhang, W.; Xiao, Y.; Yao, L.; Fang, Z. Cooperative perception technology of autonomous driving in the internet of vehicles environment: A review. Sensors 2022, 22, 5535. [Google Scholar] [CrossRef] [PubMed]
- ISO 21217-2014; Intelligent transport systems-Communications Access for Land Mobiles (CALM)-Architecture. ISO: Geneva, Switzerland, 2013.
- Aboobaker, A.K.K. Performance Analysis of Authentication Protocols in Vehicular Ad Hoc Networks (VANET). Master’s Thesis, Department of Mathematics, University of London, London, UK, 2010. [Google Scholar]
- ETSI. Intelligent Transport Systems (ITS); Radiocommunications equipment operating in the 5 855 MHz to 5 925 MHz frequency band; Harmonised Standard covering the essential requirements of article 3.2 of Directive 2014/53/EU. EN 2016, 302, V2. [Google Scholar]
- Wan, J.; Zhang, D.; Zhao, S.; Yang, L.T.; Lloret, J. Context-aware vehicular cyber-physical systems with cloud support: Architecture, challenges, and solutions. IEEE Commun. Mag. 2014, 52, 106–113. [Google Scholar] [CrossRef]
- Contreras-Castillo, J.; Zeadally, S.; Guerrero-Ibañez, J.A. Internet of vehicles: Architecture, protocols, and security. IEEE Internet Things J. 2017, 5, 3701–3709. [Google Scholar] [CrossRef]
- Kumar, N.M.; Mallick, P.K. The Internet of Things: Insights into the building blocks, component interactions, and architecture layers. Procedia Comput. Sci. 2018, 132, 109–117. [Google Scholar] [CrossRef]
- Jeong, S.; Baek, Y.; Son, S.H. A hybrid V2X system for safety-critical applications in VANET. In Proceedings of the 2016 IEEE 4th International Conference on Cyber-Physical Systems, Networks, and Applications (CPSNA), Nagoya, Japan, 6–7 October 2016; pp. 13–18. [Google Scholar]
- Eze, E.C.; Zhang, S.J.; Liu, E.J.; Eze, J.C. Advances in vehicular ad-hoc networks VANETs: Challenges and road-map for future development. Int. J. Autom. Comput. 2016, 13, 1–18. [Google Scholar] [CrossRef]
- Thakur, A.; Malekian, R.; Bogatinoska, D.C. Internet of things based solutions for road safety and traffic management in intelligent transportation systems. In Proceedings of the International Conference on ICT Innovations, Skopje, Macedonia, 18–23 September 2017; pp. 47–56. [Google Scholar]
- Trajanov, D.; Bakeva, V. ICT Innovations 2017: Data-Driven Innovation. In Proceedings of the 9th International Conference, ICT Innovations 2017, Skopje, Macedonia, 18–23 September 2017; Volume 778. [Google Scholar]
- Siddiqi, K.; Raza, A.; Muhammad, S.S. Visible light communication for V2V intelligent transport system. In Proceedings of the 2016 International Conference on Broadband Communications for Next Generation Networks and Multimedia Applications (CoBCom), Graz, Austria, 12–14 July 2016; pp. 1–4. [Google Scholar]
- Xu, W.; Zhou, H.; Cheng, N.; Lyu, F.; Shi, W.; Chen, J.; Shen, X. Internet of vehicles in big data era. IEEE/CAA J. Autom. Sin. 2017, 5, 19–35. [Google Scholar] [CrossRef]
- Sherazi, H.H.R.; Khan, Z.A.; Iqbal, R.; Rizwan, S.; Imran, M.A.; Awan, K. A heterogeneous IoV architecture for data forwarding in vehicle to infrastructure communication. Mob. Inf. Syst. 2019, 2019, 3101276. [Google Scholar] [CrossRef]
- Shahen Shah, A.; Ilhan, H.; Tureli, U. CB-MAC: A novel cluster-based MAC protocol for VANETs. IET Intell. Transp. Syst. 2019, 13, 587–595. [Google Scholar] [CrossRef]
- Shah, A.S.; Karabulut, M.A.; Ilhan, H.; Tureli, U. Performance optimization of cluster-based MAC protocol for VANETs. IEEE Access 2020, 8, 167731–167738. [Google Scholar] [CrossRef]
- Karabulut, M.A.; Shah, A.S.; Ilhan, H. A Novel MIMO-OFDM Based MAC Protocol for VANETs. IEEE Trans. Intell. Transp. Syst. 2022, 23, 20255–20267. [Google Scholar] [CrossRef]
- Wu, J.; Lu, H.; Xiang, Y.; Wang, F.; Li, H. SATMAC: Self-adaptive TDMA-based MAC protocol for VANETs. IEEE Trans. Intell. Transp. Syst. 2022, 23, 21712–21728. [Google Scholar] [CrossRef]
- Han, S.Y.; Zhang, C.Y. ASMAC: An Adaptive Slot Access MAC Protocol in Distributed VANET. Electronics 2022, 11, 1145. [Google Scholar] [CrossRef]
- Kaur, H.; Singh, H.; Sharma, A. Geographic Routing Protocol: A Review. Int. J. Grid Distrib. Comput. 2016, 9, 245–254. [Google Scholar] [CrossRef]
- Devi, S.A.; Vijayalakshmi, C. Bio Inspired Optimization Algorithms in Disaster. Procedia Comput. Sci. 2020, 172, 176–180. [Google Scholar] [CrossRef]
- Yang, X.S. Nature-inspired mateheuristic algorithms: Success and new challenges. arXiv 2012, arXiv:1211.6658. [Google Scholar] [CrossRef]
- Amer, H.M.; Al-Kashoash, H.; Hawes, M.; Chaqfeh, M.; Kemp, A.; Mihaylova, L. Centralized simulated annealing for alleviating vehicular congestion in smart cities. Technol. Forecast. Soc. Chang. 2019, 142, 235–248. [Google Scholar] [CrossRef]
- Amer, H.M.; Al-Kashoash, H.; Ma, S.; Khami, M.J.; Mihaylova, L. Hybrid game approach-based channel congestion control for the Internet of Vehicles. IET Wirel. Sens. Syst. 2021, 11, 32–44. [Google Scholar] [CrossRef]
- Amer, H.M.; Hadi, E.A.; Shihab, L.G.; Al Mohammed, H.H.; Khami, M.J. Hybrid power control and contention window adaptation for channel congestion problem in internet of vehicles network. Int. J. Electr. Comput. Eng. 2022, 12, 497. [Google Scholar] [CrossRef]
- Fu, J.; Zhu, P.; Hua, J.; Li, J.; Wen, J. Optimization of the energy efficiency in Smart Internet of Vehicles assisted by MEC. EURASIP J. Adv. Signal Process. 2022, 2022, 1–17. [Google Scholar] [CrossRef]
- Simon, D. Evolutionary Optimization Algorithms; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Ma, H.; Simon, D.; Fei, M.; Chen, Z. On the equivalences and differences of evolutionary algorithms. Eng. Appl. Artif. Intell. 2013, 26, 2397–2407. [Google Scholar] [CrossRef]
- Reeves, C.; Rowe, J.E. Genetic Algorithms: Principles and Perspectives: A Guide to GA theory; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2002; Volume 20. [Google Scholar]
- Beyer, H.G. Toward a theory of evolution strategies: The (μ, λ)-theory. Evol. Comput. 1994, 2, 381–407. [Google Scholar] [CrossRef]
- Yao, X.; Liu, Y.; Lin, G. Evolutionary programming made faster. IEEE Trans. Evol. Comput. 1999, 3, 82–102. [Google Scholar]
- Langdon, W.B.; Gustafson, S.M. Genetic programming and evolvable machines: Ten years of reviews. Genet. Program. Evolvable Mach. 2010, 11, 321–338. [Google Scholar] [CrossRef]
- Hauschild, M.; Pelikan, M. An introduction and survey of estimation of distribution algorithms. Swarm Evol. Comput. 2011, 1, 111–128. [Google Scholar] [CrossRef]
- Das, S.; Mullick, S.S.; Suganthan, P.N. Recent advances in differential evolution–an updated survey. Swarm Evol. Comput. 2016, 27, 1–30. [Google Scholar] [CrossRef]
- Dorigo, M.; Di Caro, G. Ant colony optimization: A new meta-heuristic. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; Volume 2, pp. 1470–1477. [Google Scholar]
- Clerc, M. Particle Swarm Optimization; ISTE Ltd.: London, UK, 2006. [Google Scholar]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony ABC algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Brezočnik, L.; Fister Jr, I.; Podgorelec, V. Swarm intelligence algorithms for feature selection: A review. Appl. Sci. 2018, 8, 1521. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Ezhilarasie, R.; Reddy, M.S.; Umamakeswari, A. A new hybrid adaptive GA-PSO computation offloading algorithm for IoT and CPS context application. J. Intell. Fuzzy Syst. 2019, 36, 4105–4113. [Google Scholar] [CrossRef]
- Lin, N.; Shi, Y.; Zhang, T.; Wang, X. An effective order-aware hybrid genetic algorithm for capacitated vehicle routing problems in Internet of Things. IEEE Access 2019, 7, 86102–86114. [Google Scholar] [CrossRef]
- Mohammed, M.A.; Abd Ghani, M.K.; Hamed, R.I.; Mostafa, S.A.; Ahmad, M.S.; Ibrahim, D.A. Solving vehicle routing problem by using improved genetic algorithm for optimal solution. J. Comput. Sci. 2017, 21, 255–262. [Google Scholar] [CrossRef]
- Tang, C.; Wei, X.; Hao, M.; Zhu, C.; Wang, R.; Chen, W. Traffic signal phase scheduling based on device-to-device communication. IEEE Access 2018, 6, 47636–47645. [Google Scholar] [CrossRef]
- Ebadinezhad, S.; Dereboylu, Z.; Ever, E. Clustering-based modified ant colony optimizer for internet of vehicles (CACOIOV). Sustainability 2019, 11, 2624. [Google Scholar] [CrossRef]
- Calabrò, G.; Torrisi, V.; Inturri, G.; Ignaccolo, M. Improving inbound logistic planning for large-scale real-world routing problems: A novel ant-colony simulation-based optimization. Eur. Transp. Res. Rev. 2020, 12, 1–11. [Google Scholar] [CrossRef]
- Kumar, P.M.; Manogaran, G.; Sundarasekar, R.; Chilamkurti, N.; Varatharajan, R. Ant colony optimization algorithm with internet of vehicles for intelligent traffic control system. Comput. Netw. 2018, 144, 154–162. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, MHS’95, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Vijayalakshmi, K.; Anandan, P. A multi objective Tabu particle swarm optimization for effective cluster head selection in WSN. Clust. Comput. 2019, 22, 12275–12282. [Google Scholar] [CrossRef]
- Wang, J.; Cao, Y.; Li, B.; Kim, H.j.; Lee, S. Particle swarm optimization based clustering algorithm with mobile sink for WSNs. Future Gener. Comput. Syst. 2017, 76, 452–457. [Google Scholar] [CrossRef]
- Hasan, M.Z.; Al-Turjman, F. Optimizing multipath routing with guaranteed fault tolerance in Internet of Things. IEEE Sens. J. 2017, 17, 6463–6473. [Google Scholar] [CrossRef]
- Garg, S.; Kaur, K.; Kaddoum, G.; Gagnon, F.; Kumar, N.; Han, Z. Sec-IoV: A multi-stage anomaly detection scheme for Internet of vehicles. In Proceedings of the ACM MobiHoc Workshop on Pervasive Systems in the IoT Era, Catania, Italy, 2 July 2019; pp. 37–42. [Google Scholar]
- Alzaqebah, M.; Abdullah, S.; Jawarneh, S. Modified artificial bee colony for the vehicle routing problems with time windows. SpringerPlus 2016, 5, 1298. [Google Scholar] [CrossRef] [PubMed]
- Masutti, T.A.; De Castro, L.N. Bee-Inspired Algorithms Applied to Vehicle Routing Problems: A Survey and a Proposal. Math. Probl. Eng. 2017, 2017, 3046830. [Google Scholar] [CrossRef]
- Yang, X. Nature-inspired metaheuristic algorithms. 2010. In Firefly Algorithm; Luniver Press: Frome, UK, 2011; pp. 79–90. [Google Scholar]
- Joshua, C.J.; Varadarajan, V. An optimization framework for routing protocols in VANETs: A multi-objective firefly algorithm approach. Wirel. Netw. 2021, 27, 5567–5576. [Google Scholar] [CrossRef]
- Wang, H.; Wang, W.; Zhou, X.; Sun, H.; Zhao, J.; Yu, X.; Cui, Z. Firefly algorithm with neighborhood attraction. Inf. Sci. 2017, 382, 374–387. [Google Scholar] [CrossRef]
- Abualigah, L.; Shehab, M.; Alshinwan, M.; Alabool, H. Salp swarm algorithm: A comprehensive survey. Neural Comput. Appl. 2020, 32, 11195–11215. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, J. Improved Salp Swarm Algorithm Based On Levy Flight And Sine Cosine Operator. IEEE Access 2020, 8, 99740–99771. [Google Scholar] [CrossRef]
- Goldberg, D.E.; Holland, J.H. Genetic algorithms and machine learning. Mach. Learn. 1988, 3, 121–138. [Google Scholar] [CrossRef]
- Wettergren, T.A.; Costa, R. Optimal multiobjective placement of distributed sensors against moving targets. ACM Trans. Sens. Netw. (TOSN) 2012, 8, 1–23. [Google Scholar] [CrossRef]
- Young, C.M.; Li, M.; Zhu, Y.; Xie, M.; Elsayed, E.A.; Asamov, T. Multiobjective optimization of a port-of-entry inspection policy. IEEE Trans. Autom. Sci. Eng. 2009, 7, 392–400. [Google Scholar] [CrossRef]
- Mukherjee, K.; Gupta, S.; Ray, A.; Wettergren, T.A. Statistical-Mechanics-Inspired Optimization of Sensor Field Configuration for Detection of Mobile Targets. IEEE Trans. Syst. Man Cybern. Part B 2010, 41, 783–791. [Google Scholar] [CrossRef] [PubMed]
- Dai, L.; Xu, H.; Chen, T.; Chao, Q.; Xie, L. A Multi-objective Optimization Algorithm of Task Scheduling in WSN. Int. J. Comput. Commun. Control 2014, 9, 160–171. [Google Scholar] [CrossRef]
- Dorigo, M.; Gambardella, L.M. Ant colony system: A cooperative learning approach to the traveling salesman problem. IEEE Trans. Evol. Comput. 1997, 1, 53–66. [Google Scholar] [CrossRef]
- Yang, X.S.; He, X. Nature-inspired optimization algorithms in engineering: Overview and applications. In Nature-Inspired Computation in Engineering; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1–20. [Google Scholar]
- Ma, H.; Ye, S.; Simon, D.; Fei, M. Conceptual and numerical comparisons of swarm intelligence optimization algorithms. Soft Comput. 2017, 21, 3081–3100. [Google Scholar] [CrossRef]
- Chowdhary, N.; Kaur, P.D. Dynamic route optimization using nature-inspired algorithms in IoV. In Proceedings of the First International Conference on Smart System, Innovations and Computing, Jaipur, India, 15–16 April 2017; pp. 495–504. [Google Scholar]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Parsopoulos, K.E.; Vrahatis, M.N. Particle Swarm Optimization and Intelligence: Advances and Applications; Information Science Reference: New York, NY, USA, 2010. [Google Scholar]
- Zhang, Y.; Wang, S.; Ji, G. A comprehensive survey on particle swarm optimization algorithm and its applications. Math. Probl. Eng. 2015, 2015, 931256. [Google Scholar] [CrossRef]
- Blackwell, T.; Branke, J. Multi-swarm optimization in dynamic environments. In Applications of Evolutionary Computating; Springer: Berlin/Heidelberg, Germany, 2004; pp. 489–500. [Google Scholar]
- Li, C.; Yang, S. A general framework of multipopulation methods with clustering in undetectable dynamic environments. IEEE Trans. Evol. Comput. 2012, 16, 556–577. [Google Scholar] [CrossRef]
- Yang, S.; Li, C. A clustering particle swarm optimizer for locating and tracking multiple optima in dynamic environments. IEEE Trans. Evol. Comput. 2010, 14, 959–974. [Google Scholar] [CrossRef]
- Li, X. Adaptively choosing neighbourhood bests using species in a particle swarm optimizer for multimodal function optimization. In Proceedings of the Genetic and Evolutionary Computation Conference, Seattle, WA, USA, 26–30 June 2004; pp. 105–116. [Google Scholar]
- Liu, L.; Yang, S.; Wang, D. Particle swarm optimization with composite particles in dynamic environments. IEEE Trans. Syst. Man. Cybern. Part B (Cybern.) 2010, 40, 1634–1648. [Google Scholar] [CrossRef]
- Parrott, D.; Li, X. A particle swarm model for tracking multiple peaks in a dynamic environment using speciation. In Proceedings of the 2004 Congress on Evolutionary Computation (IEEE Cat. No. 04TH8753), Portland, OR, USA, 19–23 June 2004; Volume 1, pp. 98–103. [Google Scholar]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Technical Report, Technical Report-tr06; Computer Department, Engineering Faculty, Erciyes University: Kayseri, Turkey, 2005. [Google Scholar]
- Teodorović, D. Bee colony optimization BCO. In Innovations in Swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2009; pp. 39–60. [Google Scholar]
- Karaboga, D.; Gorkemli, B.; Ozturk, C.; Karaboga, N. A comprehensive survey: Artificial bee colony ABC algorithm and applications. Artif. Intell. Rev. 2014, 42, 21–57. [Google Scholar] [CrossRef]
- Yang, X.S.; Koziel, S. Computational Optimization and Applications in Engineering and Industry; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; Volume 359. [Google Scholar]
- Sayadi, M.; Ramezanian, R.; Ghaffari-Nasab, N. A discrete firefly meta-heuristic with local search for makespan minimization in permutation flow shop scheduling problems. Int. J. Ind. Eng. Comput. 2010, 1, 1–10. [Google Scholar] [CrossRef]
- Yang, X.S. Chaos-enhanced firefly algorithm with automatic parameter tuning. In Recent Algorithms and Applications in Swarm Intelligence Research; IGI Global: Hershey, PA, USA, 2013; pp. 125–136. [Google Scholar]
- Dhanare, R.; Nagwanshi, K.K.; Varma, S. Enhancing the route optimization using hybrid MAF optimization algorithm for the internet of vehicle. Wirel. Pers. Commun. 2022, 125, 1715–1735. [Google Scholar] [CrossRef]
- Saxena, P.; Gupta, R.; Maheshwari, A.; Kaushal, G.; Tiwari, R. Three Dimensional Route Planning for Multiple Unmanned Aerial Vehicles using Salp Swarm Algorithm. arXiv 2019, arXiv:1911.10519. [Google Scholar]
- Syed, M.A.; Syed, R. Weighted Salp Swarm Algorithm and its applications towards optimal sensor deployment. J. King Saud-Univ.-Comput. Inf. Sci. 2019, 34, 1285–1295. [Google Scholar] [CrossRef]
- Openstreetmap. Available online: https://www.openstreetmap.org/ (accessed on 27 December 2022).
- Discrete Event Simulator. Available online: https://omnetpp.org/ (accessed on 27 December 2022).
- Simulation of Urban MObility. Available online: https://www.eclipse.org/sumo/ (accessed on 27 December 2022).
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; WieBner, E. Microscopic traffic simulation using SUMO. In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2575–2582. [Google Scholar]
- The Open Source Vehicular Network Simulation Framework. Available online: https://veins.car2x.org/ (accessed on 27 December 2022).
- Sommer, C.; German, R.; Dressler, F. Bidirectionally coupled network and road traffic simulation for improved IVC analysis. IEEE Trans. Mob. Comput. 2010, 10, 3–15. [Google Scholar] [CrossRef]
- Network Simulator. Available online: https://www.nsnam.org/ (accessed on 27 December 2022).
- NS-2 Simulator. Available online: https://www.isi.edu/nsnam/ns/ (accessed on 27 December 2022).
- Henderson, T.R.; Lacage, M.; Riley, G.F.; Dowell, C.; Kopena, J. Network simulations with the ns-3 simulator. SIGCOMM Demonstr. 2008, 14, 527. [Google Scholar]
- Math. Graphics. Programming. Available online: https://www.mathworks.com/products/matlab.html (accessed on 27 December 2022).
- SIMULINK. Available online: https://www.mathworks.com/products/simulink.html (accessed on 27 December 2022).
- ThingSpeak for IoT Projects. Available online: https://thingspeak.com (accessed on 27 December 2022).
- Nguyen, V.; Pham, C.; Oo, T.Z.; Tran, N.H.; Huh, E.N.; Hong, C.S. MAC protocols with dynamic interval schemes for VANETs. Veh. Commun. 2019, 15, 40–62. [Google Scholar] [CrossRef]
- Tayeb, S.; Gill, S.; Trueblood, F.; Wong, R.; Pirouz, M. A network-centric analysis for the Internet of Vehicles and simulation tools. IEEE Access 2020, 8, 68342–68364. [Google Scholar] [CrossRef]
- Yang, W.D.; Pan, L.; Zhu, H.S. Adaptive TDMA slot assignment protocol for vehicular ad-hoc networks. J. China Univ. Posts Telecommun. 2013, 20, 11–25. [Google Scholar] [CrossRef]
- Babu, S.; Patra, M.; Murthy, C.S.R. A novel context-aware variable interval MAC protocol to enhance event-driven message delivery in IEEE 802.11 p/WAVE vehicular networks. Veh. Commun. 2015, 2, 172–183. [Google Scholar]
- Babu, S.; Patra, M.; Murthy, C. An efficient TDMA-based variable interval multichannel MAC protocol for vehicular networks. Wirel. Netw. 2016, 22, 1365–1380. [Google Scholar] [CrossRef]
- Kim, D.; Velasco, Y.; Wang, W.; Uma, R.; Hussain, R.; Lee, S. A new comprehensive RSU installation strategy for cost-efficient VANET deployment. IEEE Trans. Veh. Technol. 2017, 66, 4200–4211. [Google Scholar] [CrossRef]
- Abbas, F.; Fan, P.; Khan, Z. A novel low-latency V2V resource allocation scheme based on cellular V2X communications. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2185–2197. [Google Scholar] [CrossRef]
- Gawas, M.A.; Govekar, S.S. A novel selective cross layer based routing scheme using ACO method for vehicular networks. J. Netw. Comput. Appl. 2019, 143, 34–46. [Google Scholar] [CrossRef]
- Senouci, O.; Harous, S.; Aliouat, Z. A new heuristic clustering algorithm based on RSU for internet of vehicles. Arab. J. Sci. Eng. 2019, 44, 9735–9753. [Google Scholar] [CrossRef]
- Attia, R.; Hassaan, A.; Rizk, R. Advanced greedy hybrid bio-inspired routing protocol to improve IoV. IEEE Access 2021, 9, 131260–131272. [Google Scholar] [CrossRef]
- Shah, A.S.; Karabulut, M.A.; Ilhan, H.; Tureli, U. Optimizing Vehicular Safety Message Communications by Adopting Transmission Probability With CW Size. IEEE Access 2022, 10, 118849–118857. [Google Scholar] [CrossRef]
- Flowmonitor. Available online: https://www.nsnam.org/docs/models/html/flow-monitor.html (accessed on 27 December 2022).
- NETANIM. Available online: https://www.nsnam.org/wiki/NetAnim (accessed on 27 December 2022).
- WIRESHARK. Available online: https://www.wireshark.org/ (accessed on 27 December 2022).
- Veins_INET Subproject. The Open Source Vehicular Network Simulation Framework. Available online: https://veins.car2x.org/documentation/modules/#veins_inet (accessed on 27 December 2022).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Safety Applications | Efficient Traffic Management | Support and Infotainment |
|---|---|---|
| 1. In-Vehicle Signage | 1. Road Clog Management | 1. Intelligent Parking Route |
| 2. Warning Turn Assistant | 2. Toll Management | 2. Vehicle Pooling |
| 3. Blind Merge Warning | 3. Computerized Map Downloading | 3. Web access Provisioning |
| 4. Vehicle Warning | 4. Intersection Management | 4. Distributed Data Sharing |
| 5. Emergency Electronic Brake Lights | 5. SOS Services | 5. Clinical Applications |
| 6. Early Detection Warning | ||
| 7. Pre-Crash Sensing | ||
| 8. Emergency Electronic Brake |
| Sl. | Algorithm | Publishing Year | Literature |
|---|---|---|---|
| 1 | Genetic Algorithm | Holland, 1992 [102] | [103,104,105,106] |
| 2 | Ant Colony Algorithm | Dorigo and Di Caro, 1999 [97] | [107,108,109] |
| 3 | Particle Swarm Optimization | Kennedy and Eberhart, 1995 [110] | [111,112,113] |
| 4 | Artificial Bee Colony | Karaboga, 2005 [99] | [114,115,116] |
| 5 | Firefly Algorithm | Yang, 2009 [117] | [118,119] |
| 6 | Salp Algorithm | Mirjalili, 2017 [100] | [120,121] |
| Author(s), Year | Reference | Simulation Tools Used |
|---|---|---|
| Yang et al., 2013 | [163] | MATLAB |
| Babu et al., 2015 | [164] | NS-2, SUMO, and MATLAB |
| Babu et al., 2016 | [165] | OMNET++ and SUMO |
| Kim et al., 2017 | [166] | SUMO and OSM |
| Abbas et al., 2018 | [167] | NS-3 and MATLAB |
| Lopez et al., 2018 | [152] | SUMO and TraCI |
| Gawas et al., 2019 | [168] | OSM, NS-2, VANET MobiSim |
| Senouci et al., 2019 | [169] | NS-2 |
| Shah et al., 2020 | [78] | SUMO and MATLAB |
| Attia et al., 2021 | [170] | OMNET++, OSM, and SUMO |
| Han et al., 2022 | [81] | NS-3 and SUMO |
| Shah et al., 2022 | [171] | SUMO and MATLAB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Panigrahy, S.K.; Emany, H. A Survey and Tutorial on Network Optimization for Intelligent Transport System Using the Internet of Vehicles. Sensors 2023, 23, 555. https://doi.org/10.3390/s23010555
Panigrahy SK, Emany H. A Survey and Tutorial on Network Optimization for Intelligent Transport System Using the Internet of Vehicles. Sensors. 2023; 23(1):555. https://doi.org/10.3390/s23010555
Chicago/Turabian StylePanigrahy, Saroj Kumar, and Harika Emany. 2023. "A Survey and Tutorial on Network Optimization for Intelligent Transport System Using the Internet of Vehicles" Sensors 23, no. 1: 555. https://doi.org/10.3390/s23010555
APA StylePanigrahy, S. K., & Emany, H. (2023). A Survey and Tutorial on Network Optimization for Intelligent Transport System Using the Internet of Vehicles. Sensors, 23(1), 555. https://doi.org/10.3390/s23010555