
Xiroi II, an Evolved ASV Platform for Marine Multirobot Operations



Abstract
1. Introduction
- The software architecture must be ROS-based, open-source, and easy to adapt to other ASV’s.
- The ASV must navigate accurately in order to act as a reliable observation platform for shallow waters benthic habitats.
- The ASV should act as a relay communication point with the GS and the AUV enabling operations in deeper and more distant coastal areas.
- The vehicle must be suitable for use as part of a MMRS and implement a coordination strategy to improve the quality of the ACL.
2. Related Work
3. Hardware Design
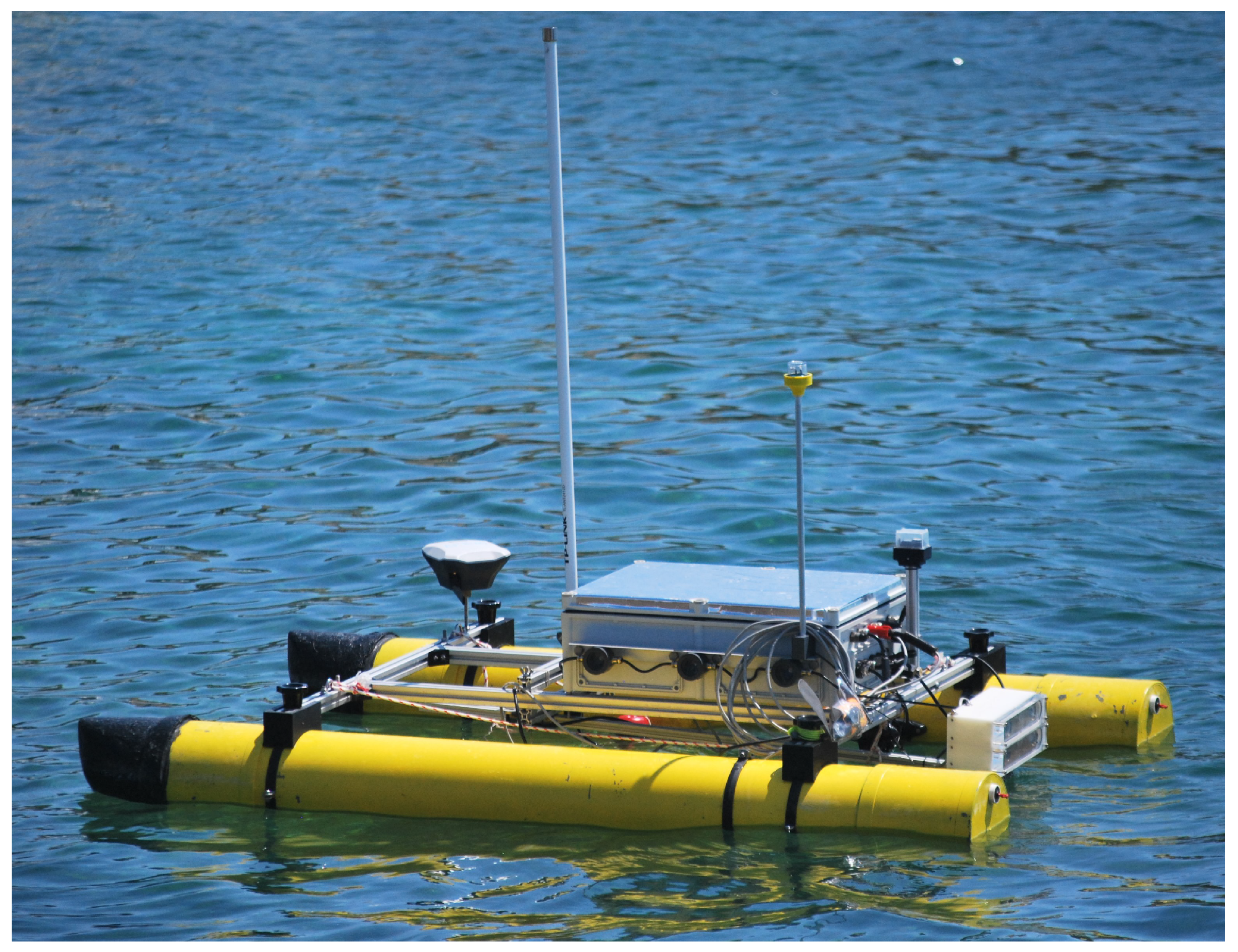
3.1. Vehicle Design
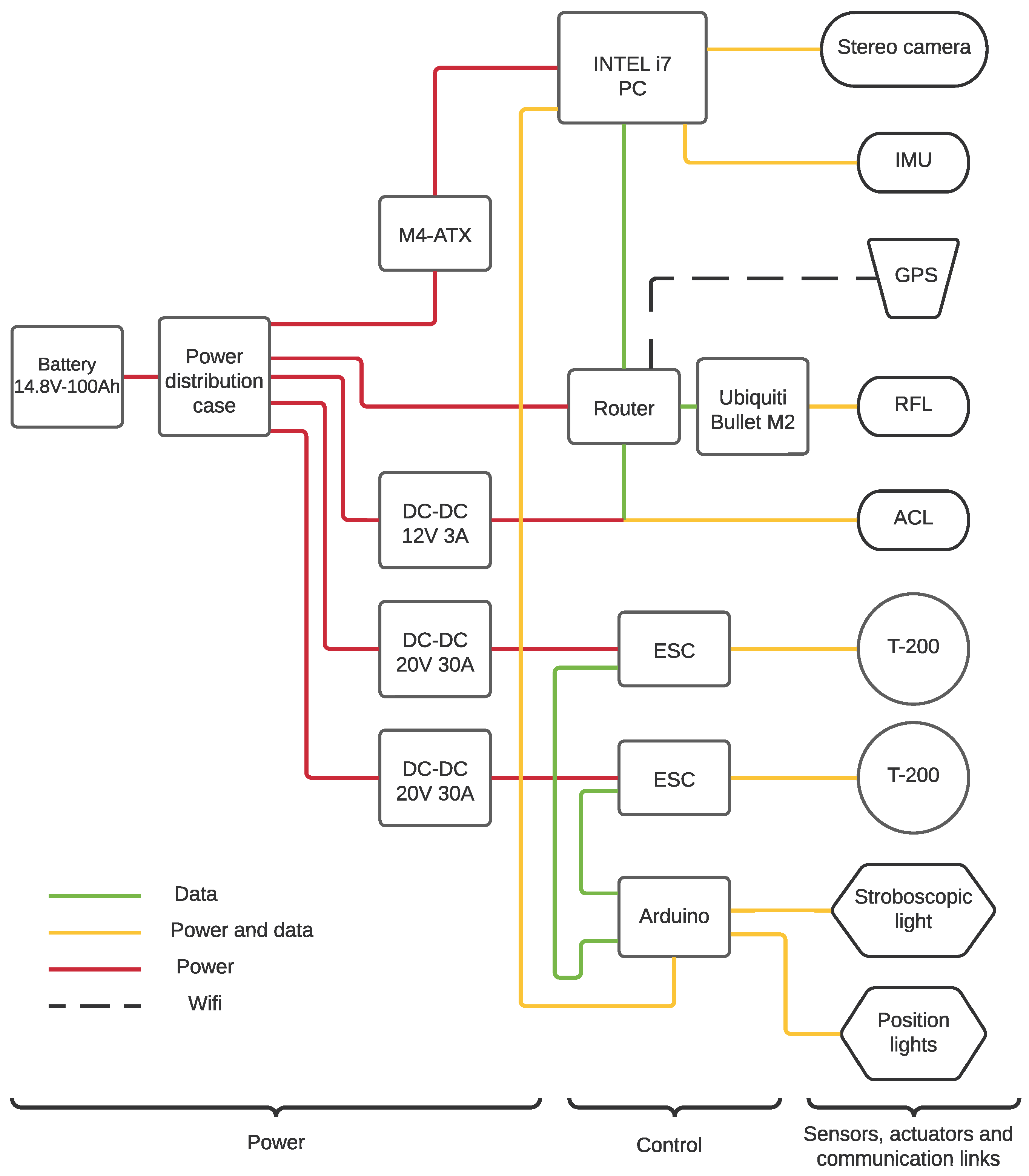
3.2. Electronics
- Power Layer
- Control Layer
- Sensors, Actuators, and Communication Links Layer
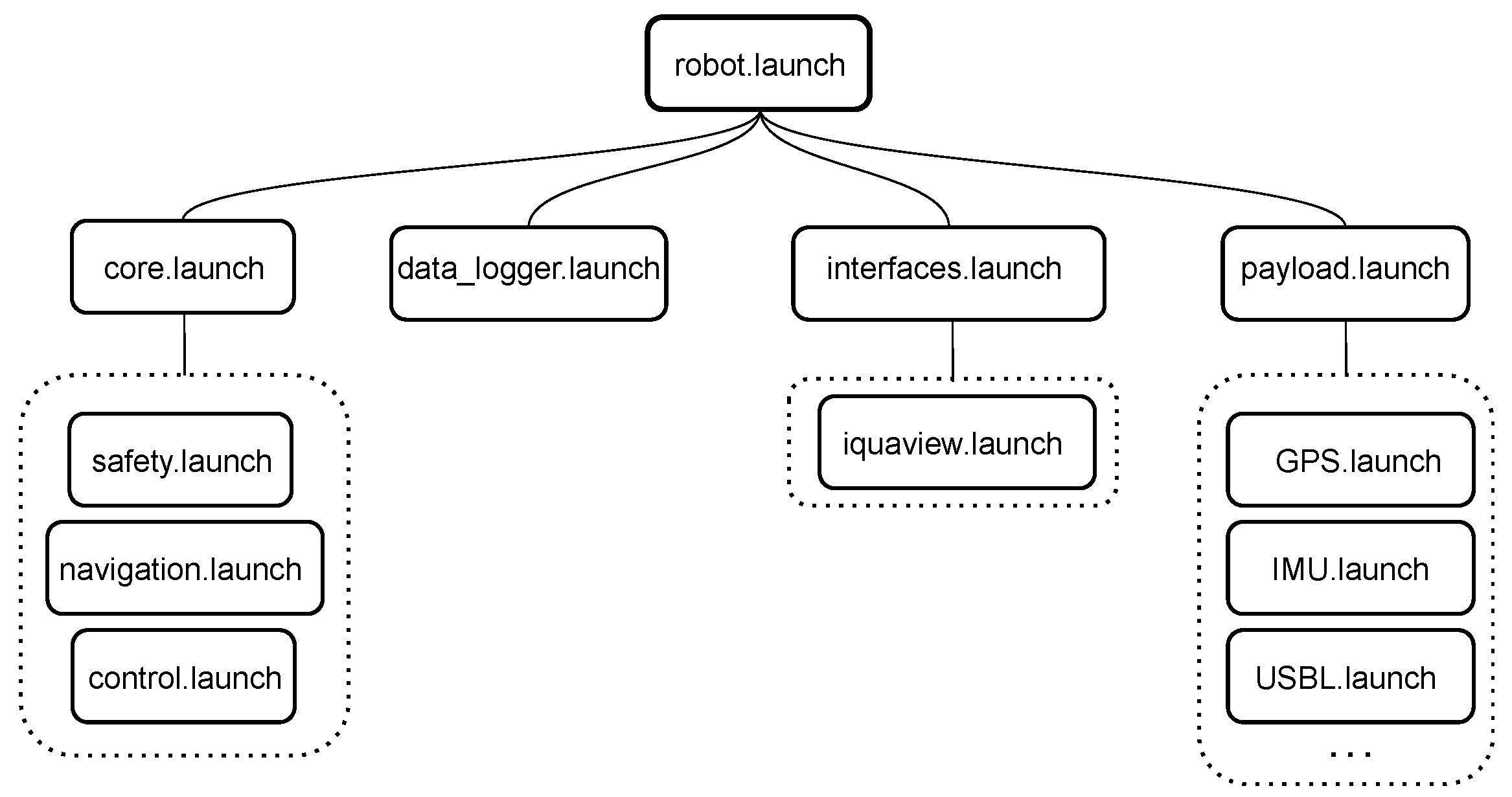
4. Software Architecture
- Software portability, reuse, and sharing, thus improving its maintainability.
- Avoids crosscompiling and strengthens the data integrity of the whole system.
- It enables a pure distributed software and applications.
4.1. Localization
- Sensor Aggregator
- IMU filter Madgwick
- Robot Localization filter
4.2. Control
- Thruster Control Matrix
- Thrusters characterization
4.3. Navigation
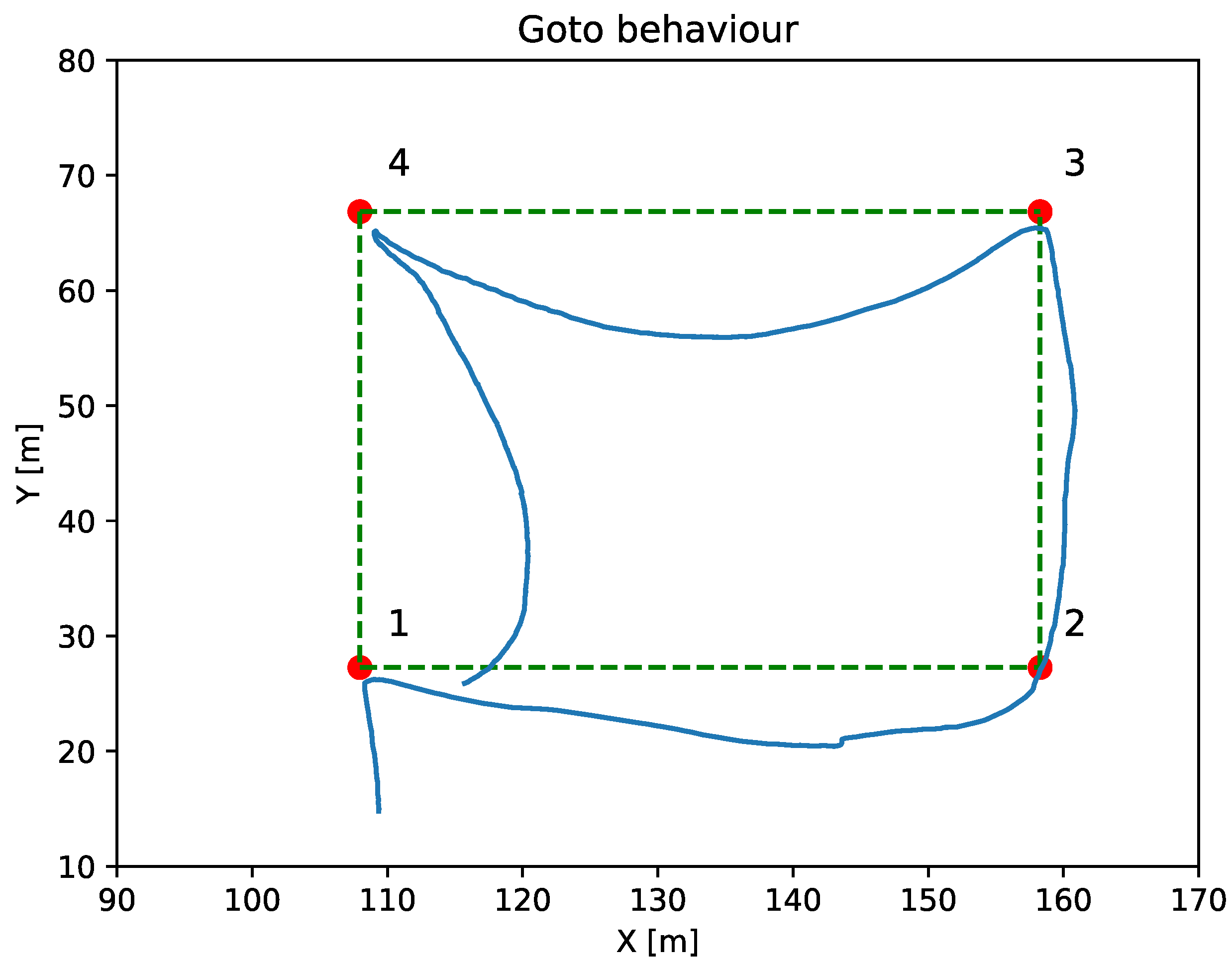
- Goto
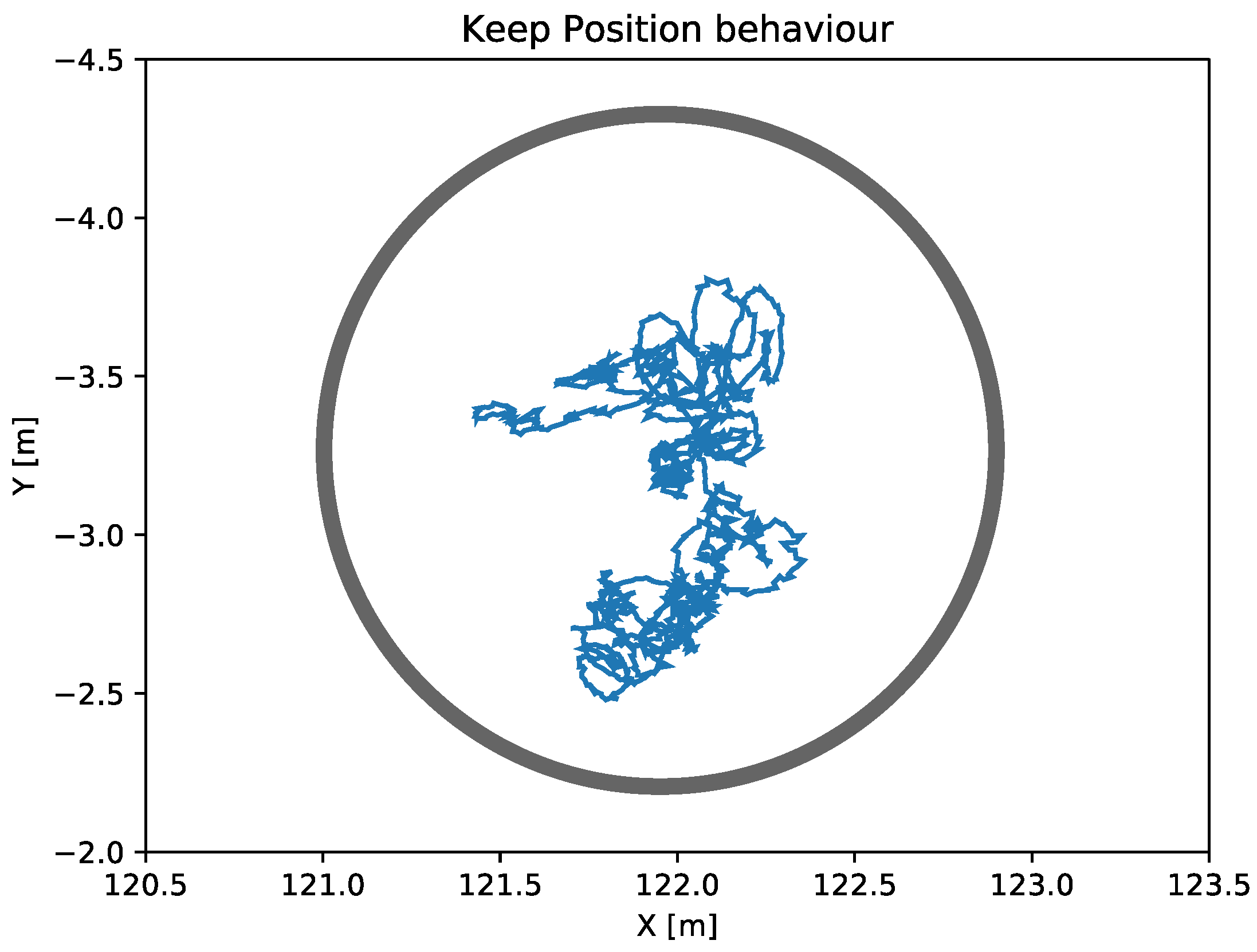
- Keep position
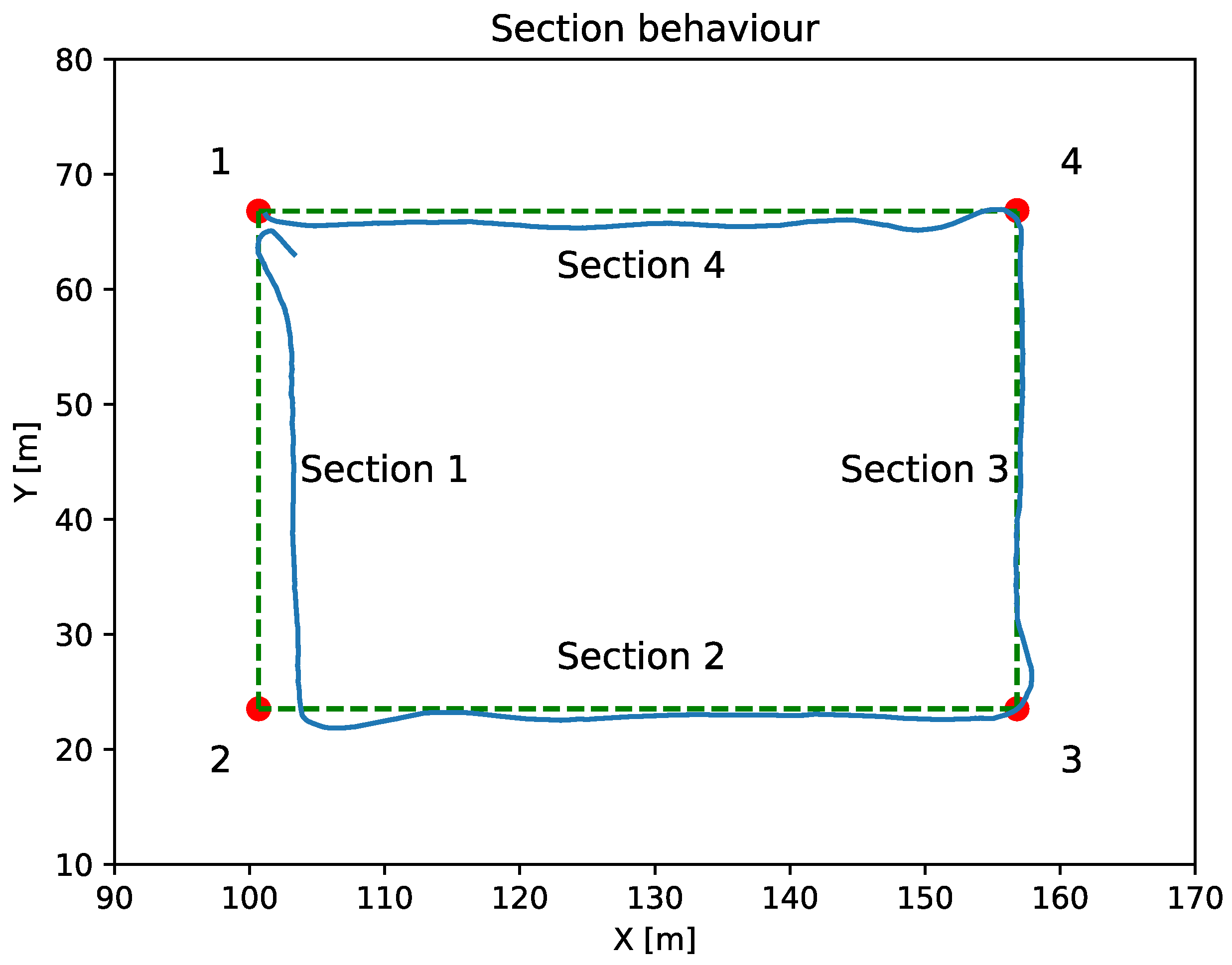
- Section
- Mission
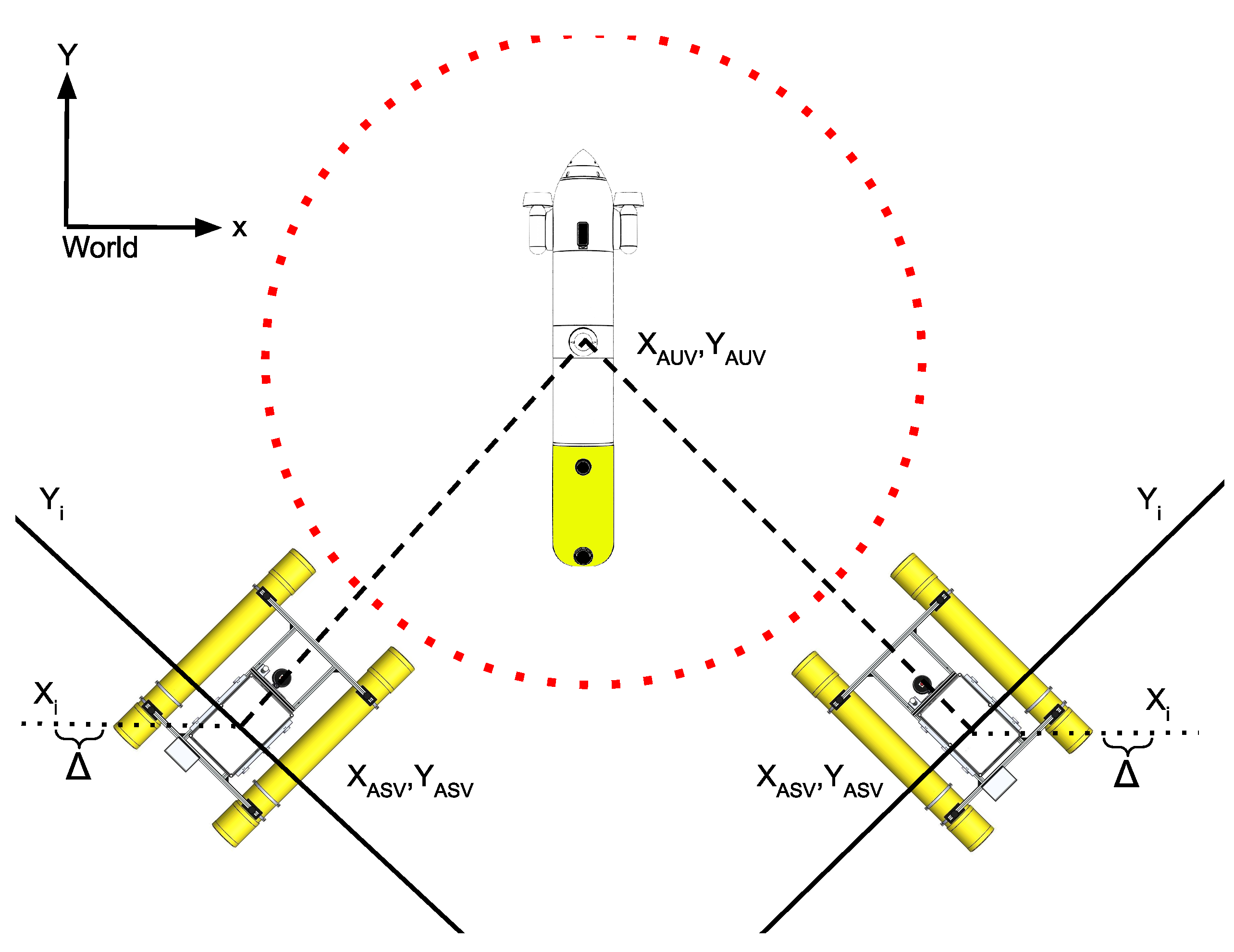
5. Marine Multirobot Coordination
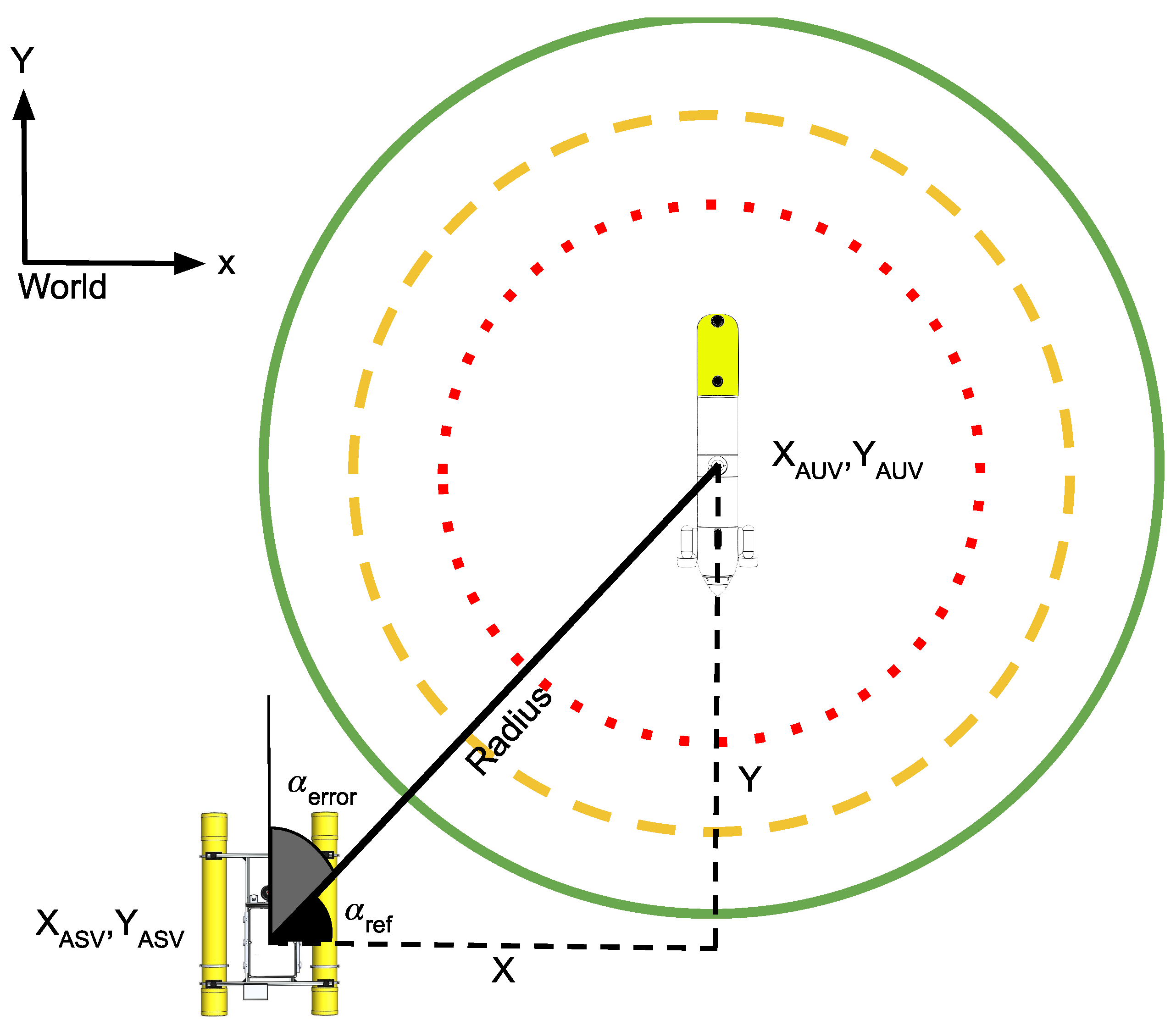
5.1. AUV Tracking Strategy
- The ASV must keep close to the AUV according to the predefined adrift radius.
- The ASV must apply a safety repulsion behavior in case it reaches the repulsion radius.
- In order to minimize acoustic perturbances between the ASV thrusters and the ACL, the ASV will disable the thrusters in the area between the adrift radius and the repulsion radius.
6. Platform Tests
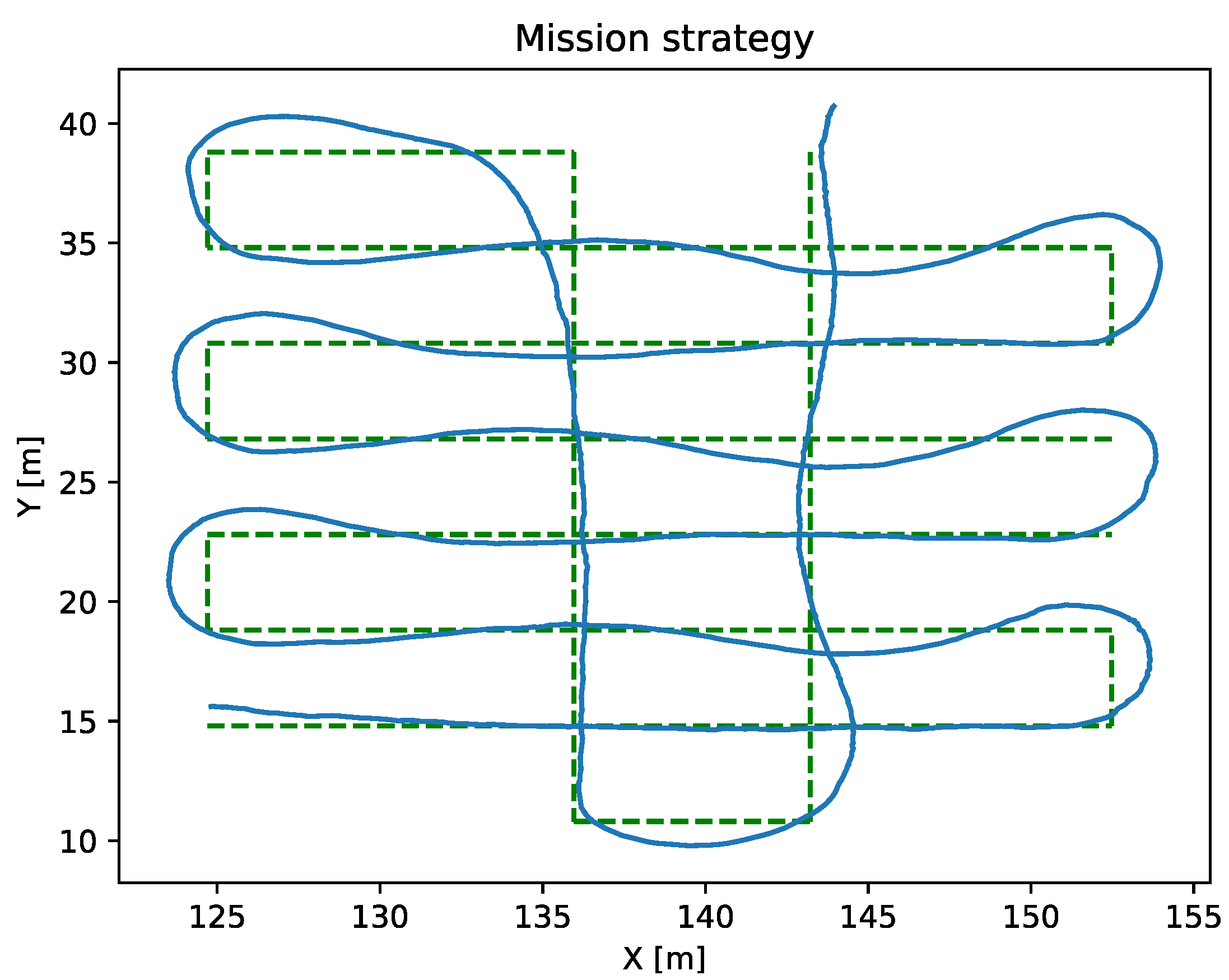
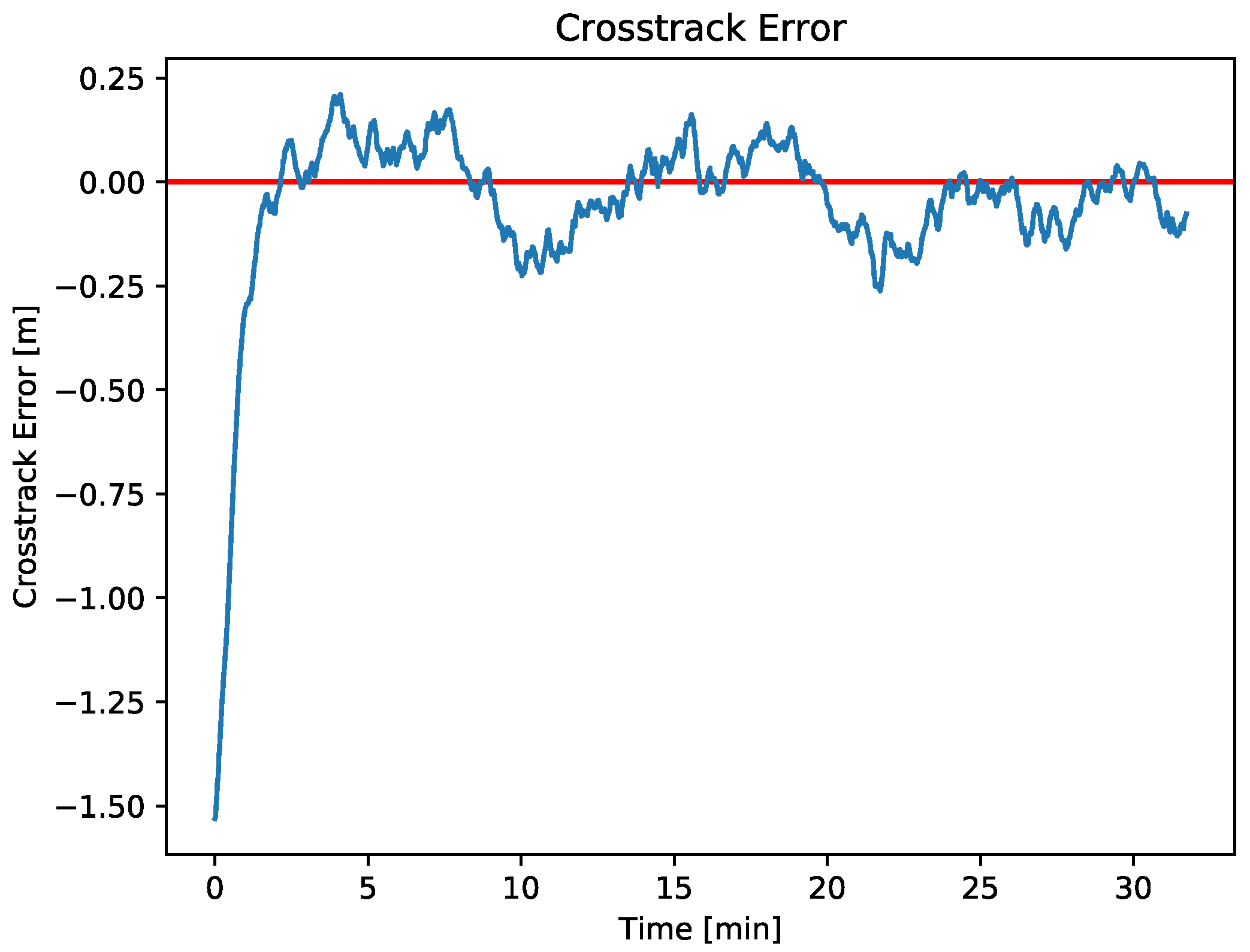
6.1. Navigation Tests
- Keep position
- Goto
- Section
- Mission
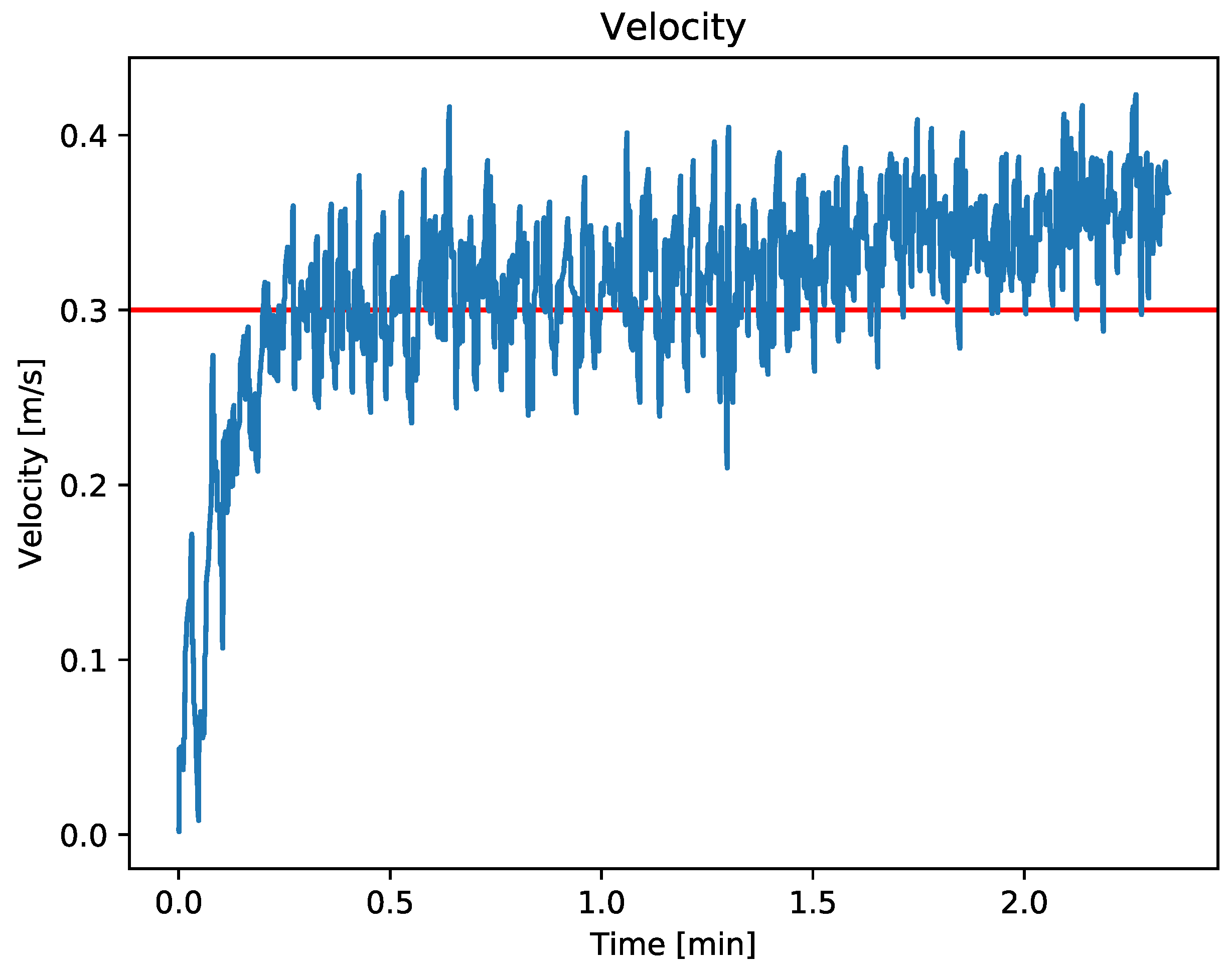
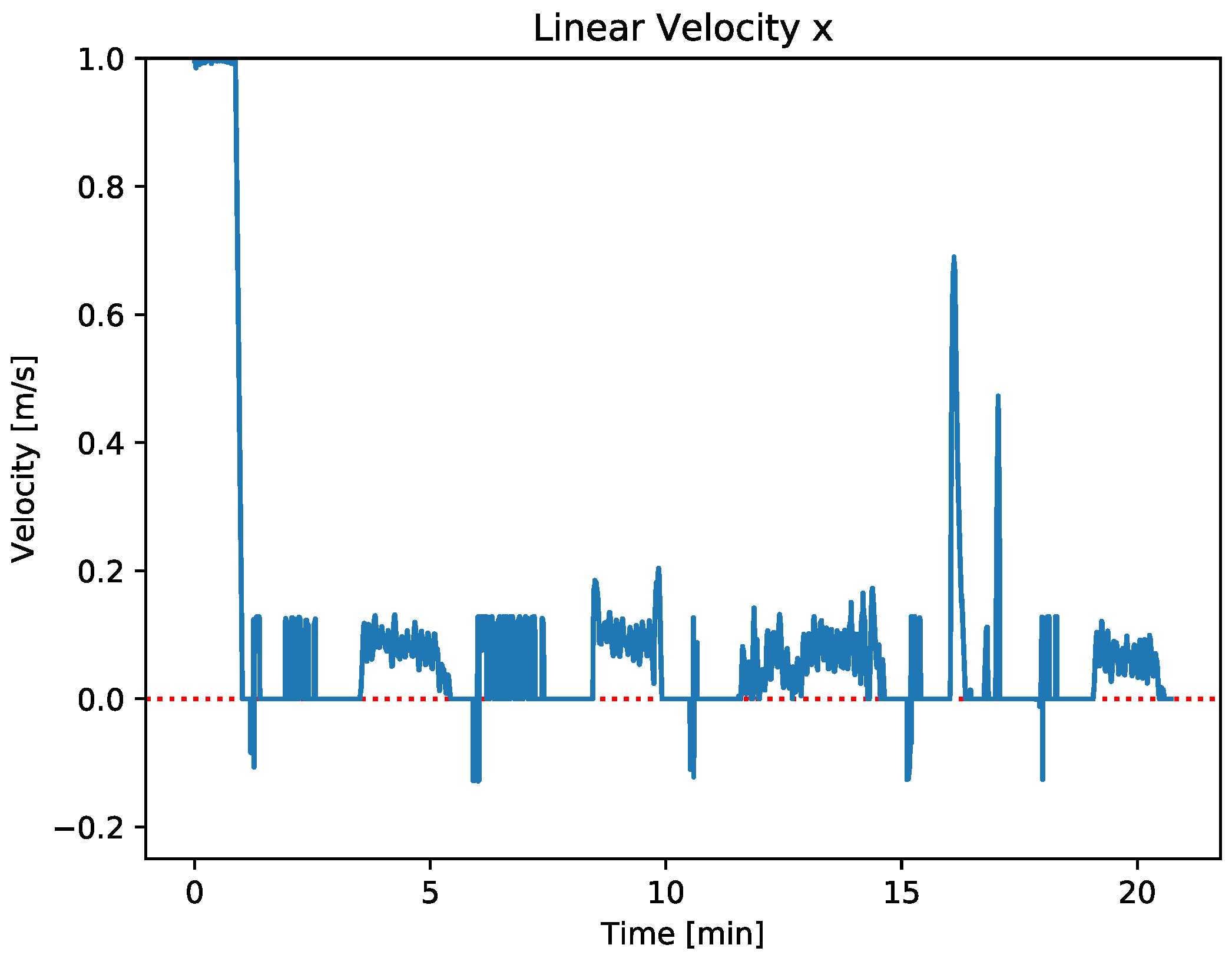
6.2. Control Tests
- Position controller test
- Velocity controller test
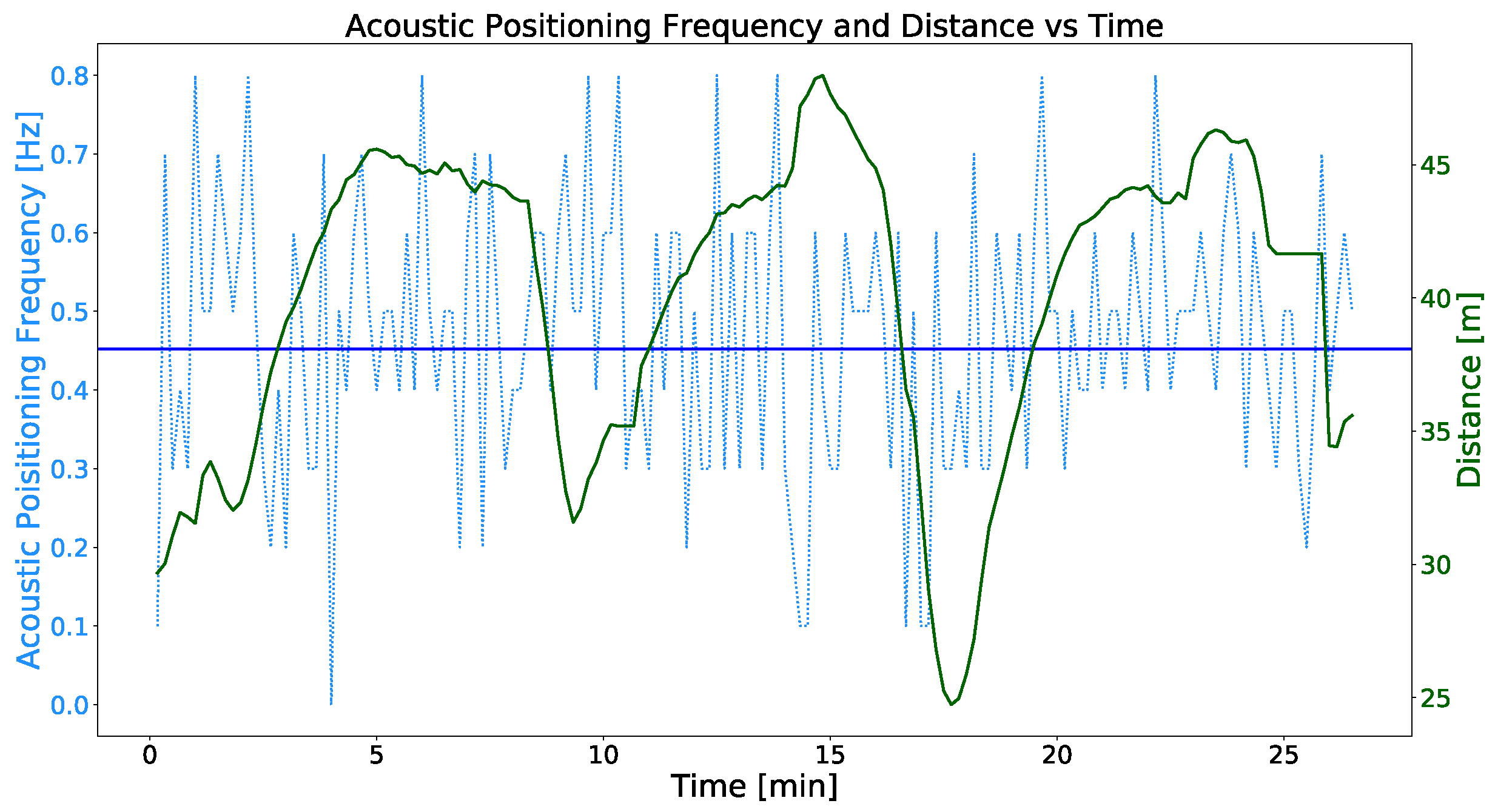
7. MMRS Tracking Strategy Tests
7.1. Navigation Study
7.2. Acoustic Communication Study
- Test without using any coordination strategy between the ASV and the AUV.
- Test using the MMRS tracking strategy described above.
- 1.
- Tests without tracking: To begin with, the first test consisted of mooring the ASV in a static position, using the keep position navigation strategy while the AUV executes the test bench mission.
- 2.
- Tests with tracking: In the second sea trial, the ASV was programmed to track the AUV while the latter performs the same mission as in the first test. The parameters for the tracking strategy used in this case are shown in Table 5.
8. Conclusions and Future Work
- The software, an adapted version of the ROS-based COLA2 architecture, has been presented and detailed to serve as a reference for future ASV developments.
- With the new architecture, the vehicle has the ability to apply a variety of precise navigation strategies such as goto, keep position, section, or mission. This navigation behaviors are useful for the ASV to act as a reliable observation platform for shallow water benthic habitats. All these behaviors has been described, adjusted, and tested in real operating conditions with optimum results in both position and velocity control tests.
- Regarding the MMRS coordination strategies, an additional navigation behavior has been implemented for the tracking of an AUV. The analysis of the navigation frequency and acoustic communication tests shows that the designed tracking strategy achieves a significant increase from 0.177 Hz to 0.468 Hz in the reception frequency of the acoustic positioning corrections. This improvement allows the AUV to receive the acoustic positioning more frequently, which makes the vehicle localization more accurate.
- A new buoyancy hull design should be done taking into account the lightness, hydrodynamic, and modularity that characterizes the present vehicle. In addition, another frame should be built to rise the electronics case above the sea surface and prevent splashing.
- In terms of coordination strategies, new algorithms can be implemented to further improve the ACL communication, paying special attention to the relative orientation between vehicles as this factor seems to have some residual impact on acoustic reception.
- In terms of ACL, an analysis should be conducted to determine the improvement on the AUV localization when using the MMRS coordination strategy.
- In terms of MMRS coordination strategies, expand the tracking strategy with the aim of improving the acoustic communication link to more than two marine vehicles.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yan, Z.; Jouandeau, N.; Cherif, A.A. A survey and analysis of multi-robot coordination. Int. J. Adv. Robot. Syst. 2013, 10, 399. [Google Scholar] [CrossRef]
- Martorell-Torres, A.; Massot-Campos, M.; Guerrero-Font, E.; Oliver-Codina, G. Xiroi ASV: A Modular Autonomous Surface Vehicle to Link Communications. IFAC-PapersOnLine 2018, 51, 147–152. [Google Scholar] [CrossRef]
- Zhou, Z.; Liu, J.; Yu, J. A Survey of Underwater Multi-Robot Systems. IEEE/CAA J. Autom. Sin. 2022, 9, 1–18. [Google Scholar] [CrossRef]
- Stojanovic, M. Underwater acoustic communications. Electro Int. Conf. Proc. 1995, 42, 435–440. [Google Scholar]
- Carreras, M.; Hernandez, J.D.; Vidal, E.; Palomeras, N.; Ribas, D.; Ridao, P. Sparus II AUV—A Hovering Vehicle for Seabed Inspection. IEEE J. Ocean. Eng. 2018, 43, 344–355. [Google Scholar] [CrossRef]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In ICRA Workshop on Open Source Software; 2009; Volume 3, p. 5. Available online: https://www.researchgate.net/publication/233881999_ROS_an_open-source_Robot_Operating_System (accessed on 15 December 2022).
- Stanford Artificial Intelligence Laboratory Robotic Operating System. 2021. Available online: https://www.ros.org (accessed on 21 December 2022).
- Odetti, A.; Bruzzone, G.; Altosole, M.; Viviani, M.; Caccia, M. SWAMP, an Autonomous Surface Vehicle expressly designed for extremely shallow waters. Ocean Eng. 2020, 216, 108205. [Google Scholar] [CrossRef]
- Millet, R.; Plumet, F.; Dern, J.C. Autonomous Surface Vehicles for Oceanographic Survey. In Proceedings of the Conference: International. Autonomous Surface Ship Symposium, Paris, France, January 2008. [Google Scholar]
- Manley, J.E. Unmanned surface vehicles, 15 years of development. In OCEANS 2008; IEEE: Piscataway, NJ, USA, 2008. [Google Scholar]
- Tanakitkorn, K. A review of unmanned surface vehicle development. Marit. Technol. Res. 2019, 1, 2–8. [Google Scholar] [CrossRef]
- Jorge, V.A.; Granada, R.; Maidana, R.G.; Jurak, D.A.; Heck, G.; Negreiros, A.P.; dos Santos, D.H.; Gonçalves, L.M.; Amory, A.M. A survey on unmanned surface vehicles for disaster robotics: Main challenges and directions. Sensors 2018, 19, 702. [Google Scholar] [CrossRef]
- Zakki, A.F.; Triwiyatno, A.; Sasmito, B.; Budiono, K. Design and control of autonomous surface vehicle to support bathymetry survey in the coastal environment. Adv. Sci. Technol. Eng. Syst. 2019, 4, 458–461. [Google Scholar] [CrossRef]
- Idris, M.H.B.M.; Kamarudin, M.A.A.B.C.; Sahalan, M.I.; Abidin, Z.B.Z.; Rashid, M.M. Design and Development of an Autonomous Surface Vessel for Inland Water Depth Monitoring. In Proceedings of the 6th International Conference on Computer and Communication Engineering: Innovative Technologies to Serve Humanity, ICCCE 2016, Kuala Lumpur, Malaysia, 25–27 July 2016; pp. 177–182. [Google Scholar] [CrossRef]
- BAYRAM, H. Design and Implementation of Autonomous Surface Vehicle for Inland Water. J. Inst. Sci. Technol. 2020, 10, 101–111. [Google Scholar] [CrossRef]
- Sornek, K.; Wiercioch, J.; Kurczyna, D.; Figaj, R.; Wójcik, B.; Borowicz, M.; Wieliński, M. Development of a solar-powered small autonomous surface vehicle for environmental measurements. Energy Convers. Manag. 2022, 267, 115953. [Google Scholar] [CrossRef]
- Wang, W.; Mateos, L.A.; Park, S.; Leoni, P.; Gheneti, B.; Duarte, F.; Ratti, C.; Rus, D. Design, Modeling, and Nonlinear Model Predictive Tracking Control of a Novel Autonomous Surface Vehicle. In Proceedings of the IEEE International Conference on Robotics and Automation, Brisbane, Australia, 21–25 May 2018; pp. 6189–6196. [Google Scholar] [CrossRef]
- Moulton, J.; Karapetyan, N.; Bukhsbaum, S.; McKinney, C.; Malebary, S.; Sophocleous, G.; Li, A.Q.; Rekleitis, I. An Autonomous Surface Vehicle for Long Term Operations. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, OCEAN 2018, Charleston, SC, USA, 22–25 October 2018. [Google Scholar] [CrossRef]
- Carlson, D.F.; Fürsterling, A.; Vesterled, L.; Skovby, M.; Pedersen, S.S.; Melvad, C.; Rysgaard, S. An affordable and portable autonomous surface vehicle with obstacle avoidance for coastal ocean monitoring. HardwareX 2019, 5, 1–20. [Google Scholar] [CrossRef]
- Cao, H.; Guo, Z.; Wang, S.; Cheng, H.; Zhan, C. Intelligentwide-area water quality monitoring and analysis system exploiting unmanned surface vehicles and ensemble learning. Water 2020, 12, 681. [Google Scholar] [CrossRef]
- Stanghellini, G.; Bianco, F.D.; Gasperini, L. OpenSWAP, an Open Architecture, Low Cost Class of Autonomous Surface Vehicles for Geophysical Surveys in the Shallow Water Environment. Spec. Issue Remote Sens. Appl. Geophys. 2020, 12, 2575. [Google Scholar] [CrossRef]
- Ferri, G.; Manzi, A.; Fornai, F.; Member, A.; Ciuchi, F.; Laschi, C.; Member, S. The HydroNet ASV, a Small-Sized Autonomous Catamaran for Real-Time Monitoring of Water Quality: From Design to Missions at Sea. IEEE J. Ocean. Eng. 2015, 40, 710–726. [Google Scholar] [CrossRef]
- Regina, B.A.; Honório, L.M.; Pancoti, A.A.; Silva, M.F.; Santos, M.F.; Lopes, V.M.; Santos Neto, A.F.; Westin, L.G. Hull and aerial holonomic propulsion system design for optimal underwater sensor positioning in autonomous surface vessels. Sensors 2021, 21, 571. [Google Scholar] [CrossRef]
- Olaoye, A.T.; Brizzolara, S. ASV operability at sea: Size matters as much as hull form design. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, OCEANS 2016, Monterey, CA, USA, 9–23 September 2016. [Google Scholar] [CrossRef]
- Odetti, A.; Altosole, M.; Bruzzone, G.; Viviani, M.; Caccia, M. A new concept of highly modular ASV for extremely shallow water applications. IFAC-PapersOnLine 2019, 52, 181–186. [Google Scholar] [CrossRef]
- Furfaro, T.C.; Dusek, J.E.; Von Ellenrieder, K.D. Design, construction, and initial testing of an autonomous surface vehicle for riverine and coastal reconnaissance. In Proceedings of the MTS/IEEE Biloxi-Marine Technology for Our Future: Global and Local Challenges, OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009. [Google Scholar] [CrossRef]
- Pinto, J.; Calado, P.; Braga, J.; Dias, P.; Martins, R.; Marques, E.; Sousa, J.B. Implementation of a control architecture for networked vehicle systems. Ifac Proc. Vol. (IFAC-PapersOnline) 2012, 3, 100–105. [Google Scholar] [CrossRef]
- Pinto, J.; Dias, P.S.; Martins, R.; Fortuna, J.; Marques, E.; Sousa, J. The LSTS toolchain for networked vehicle systems. In Proceedings of the OCEANS 2013 MTS/IEEE Bergen: The Challenges of the Northern Dimension, Bergen, Norway, 10–13 June 2013. [Google Scholar] [CrossRef]
- Palomeras, N.; El-Fakdi, A.; Carreras, M.; Ridao, P. COLA2: A control architecture for AUVs. IEEE J. Ocean. Eng. 2012, 37, 695–716. [Google Scholar] [CrossRef]
- Karapetyan, N.; Moulton, J.; Lewis, J.S.; Quattrini Li, A.; Okane, J.M.; Rekleitis, I. Multi-robot Dubins Coverage with Autonomous Surface Vehicles. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 2373–2379. [Google Scholar] [CrossRef]
- Manjanna, S.; Li, A.Q.; Smith, R.N.; Rekleitis, I.; Dudek, G. Heterogeneous Multi-Robot System for Exploration and Strategic Water Sampling. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 4873–4880. [Google Scholar] [CrossRef]
- Singh, Y.; Bibuli, M.; Zereik, E.; Sharma, S.; Khan, A.; Sutto, R. A novel double layered hybrid multi-robot framework for guidance and navigation of unmanned surface vehicles in a practical maritime environment. J. Mar. Sci. Eng. 2020, 8, 624. [Google Scholar] [CrossRef]
- Vasiljevic, G.; Petrovic, T.; Arbanas, B.; Bogdan, S. Dynamic Median Consensus for Marine Multi-Robot Systems Using Acoustic Communication. IEEE Robot. Autom. Lett. 2020, 5, 5299–5306. [Google Scholar] [CrossRef]
- Mcmahon, J. Autonomous Data Collection With Timed Communication Constraints for Unmanned Underwater Vehicles. IEEE Robot. Autom. 2021, 6, 1832–1839. [Google Scholar] [CrossRef]
- Braginsky, B.; Baruch, A.; Guterman, H. Development of an Autonomous Surface Vehicle capable of tracking Autonomous Underwater Vehicles. Ocean Eng. 2020, 197, 106868. [Google Scholar] [CrossRef]
- Arbanas, B.; Petrovic, T.; Bogdan, S. Consensus Protocol for Underwater Multi-Robot System Using Two Communication Channels. In Proceedings of the MED 2018—26th Mediterranean Conference on Control and Automation, Zadar, Croatia, 19–22 June 2018; pp. 358–363. [Google Scholar] [CrossRef]
- Bresciani, M.; Peralta, G.; Ruscio, F.; Bazzarello, L.; Caiti, A.; Costanzi, R. Cooperative ASV/AUV system exploiting active acoustic localization. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 4337–4342. [Google Scholar] [CrossRef]
- Pham Van, T.; Dang, C.D.N. Underwater Seraching based on AUV-ASV Cooperation. In Proceedings of the Internation Confernce on Ubiquitous Information Management Communication, Seoul, Republic of Korea, 3–5 January 2022. [Google Scholar]
- Jakuba, M.V.; Kaiser, C.L.; German, C.R.; Soule, A.S.; Kelley, S.R. Toward an Autonomous Communications Relay for Deep-Water Scientific AUV Operations. In Proceedings of the AUV 2018—2018 IEEE/OES Autonomous Underwater Vehicle Workshop, Porto, Portugal, 6–9 November 2018. [Google Scholar] [CrossRef]
- Georgia Tech Savannah Robotics’ ASV Competition. In Proceedings of the 14th Mediterranean Conference on Control and Automation, MED’06, AUVSI and ONR’s RoboBoat Competition, Ancona, Italy, 2003; pp. 1–15.
- XiroiStack. 2021. Available online: https://github.com/srv/xiroi_stack (accessed on 21 December 2022).
- Ribés Nebot, L. IQUAview: Una interfaz de usuario para operar vehículos submarinos basada en QGIS. 2019. Available online: https://dugi-doc.udg.edu/handle/10256/17275 (accessed on 21 December 2022).
- Iquaview. Iquaview Wiki. 2021. Available online: https://bitbucket.org/iquarobotics/iquaview/ (accessed on 21 December 2022).
- Moore, T.; Stouch, D. A Generalized Extended Kalman Filter Implementation for the Robot Operating System. In Proceedings of the 13th International Conference on Intelligent Autonomous Systems (IAS-13), Padova, Italy, 15–18 July 2014; Springer: Cham, Switzerland, 2016; pp. 335–348. [Google Scholar]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar]
- Moore. Robot Localization Documentation. 2021. Available online: http://wiki.ros.org/robot_localization (accessed on 21 December 2022).
- REP105. 2021. Available online: https://www.ros.org/reps/rep-0105.html (accessed on 21 December 2022).
- T200 Thruster. Available online: https://bluerobotics.com/store/thrusters/t100-t200-thrusters/t200-thruster-r2-rp/ (accessed on 21 December 2022).
- Line-of-sight path following of underactuated marine craft. IFAC Proc. Vol. (IFAC-PapersOnline) 2003, 36, 211–216. [CrossRef]
- Rizk, Y.; Awad, M.; Tunstel, E.W. Cooperative heterogeneous multi-robot systems: A survey. ACM Comput. Surv. (CSUR) 2019, 52, 1–31. [Google Scholar] [CrossRef]
- Verma, J.K.; Ranga, V. Multi-Robot Coordination Analysis, Taxonomy, Challenges and Future Scope. J. Intell. Robot. Syst. 2021, 102, 1–36. [Google Scholar] [CrossRef] [PubMed]
- Farinelli, A.; Iocchi, L.; Nardi, D. Multirobot systems: A classification focused on coordination. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2004, 34, 2015–2028. [Google Scholar] [CrossRef] [PubMed]
- Hilmi Ismail, Z.; Sariff, N. A Survey and Analysis of Cooperative Multi-Agent Robot Systems: Challenges and Directions. Appl. Mob. Robot. 2019, 8–14. [Google Scholar] [CrossRef]
- Sheng, W.; Yang, Q.; Tan, J.; Xi, N. Distributed multi-robot coordination in area exploration. Robot. Auton. Syst. 2006, 54, 945–955. [Google Scholar] [CrossRef]
- Braginsky, B.; Baruch, A.; Guterman, H. Tracking of Autonomous Underwater Vehicles using an Autonomous Surface Vehicle with ranger interrogator system. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, OCE 2016, Monterey, CA, USA, 19–23 September 2016. [Google Scholar] [CrossRef]
- Ji, D.; Ren, S.; Rong, Z.; Yi, R.; Zhao, H.; Yang, L. A tracking control method of ASV following AUV. In Proceedings of the OCEANS 2013 MTS/IEEE—San Diego: An Ocean in Common, San Diego, CA, USA, 23–27 September 2013. [Google Scholar]
- Inaba, S.; Sasano, M.; Kim, K.; Seta, T.; Okamoto, A.; Tamura, K.; Ura, T.; Sawada, S.; Suto, T. Tracking experiment of multiple AUVs by a semi-submersible ASV. In Proceedings of the 2017 IEEE OES International Symposium on Underwater Technology, UT 2017, Busan, Republic of Korea, 21–24 February 2017. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Specifications | |
|---|---|
| Battery | Lithium-Ion, 14.8 v 100 Ah |
| Actuators | 2 × Blue Robotics T200 |
| Weight | 45.8 kg |
| Payload capacity | 20 kg |
| Dimensions | 1.75 × 1 × 0.4 m |
| Computer | Intel Core i7 |
| Software | Ubuntu 18.04 and ROS Melodic |
| Battery Pack Specifications | |
|---|---|
| Rechargeable cells | Li-ion Samsung ICR18650-26F |
| Voltage | 14.8 V |
| Capacity | 100 Ah |
| Power | 1480 W |
| Weight | 7.2 Kg |
| Computer Specifications | |
|---|---|
| Motherboard | MSI MPG Z390I |
| Gaming Edge AC | |
| RAM memory | 2 × 8 GB |
| SSD storage disk | 240 GB |
| HDD storage disk | 1 TB |
| Processor | INTEL CORE i7 |
| Test Bench Mission Parameters | |
|---|---|
| AUV velocity | 0.3 [m/s] |
| AUV altitude | 5 [m] |
| Mission length | 160 [m] |
| Mission width | 5 [m] |
| ACL power | 6 [dB] |
| Tracking Parameters | |
|---|---|
| Tracking radius | 65 [m] |
| Adrift radius | 45 [m] |
| Repulsion Radius | 25 [m] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martorell-Torres, A.; Guerrero-Font, E.; Guerrero-Sastre, J.; Oliver-Codina, G. Xiroi II, an Evolved ASV Platform for Marine Multirobot Operations. Sensors 2023, 23, 109. https://doi.org/10.3390/s23010109
Martorell-Torres A, Guerrero-Font E, Guerrero-Sastre J, Oliver-Codina G. Xiroi II, an Evolved ASV Platform for Marine Multirobot Operations. Sensors. 2023; 23(1):109. https://doi.org/10.3390/s23010109
Chicago/Turabian StyleMartorell-Torres, Antoni, Eric Guerrero-Font, José Guerrero-Sastre, and Gabriel Oliver-Codina. 2023. "Xiroi II, an Evolved ASV Platform for Marine Multirobot Operations" Sensors 23, no. 1: 109. https://doi.org/10.3390/s23010109
APA StyleMartorell-Torres, A., Guerrero-Font, E., Guerrero-Sastre, J., & Oliver-Codina, G. (2023). Xiroi II, an Evolved ASV Platform for Marine Multirobot Operations. Sensors, 23(1), 109. https://doi.org/10.3390/s23010109