
Design, Manufacture, Test and Experiment of Six-Axis Force Torque Sensor for Chinese Experimental Module Manipulator

Abstract
1. Introduction
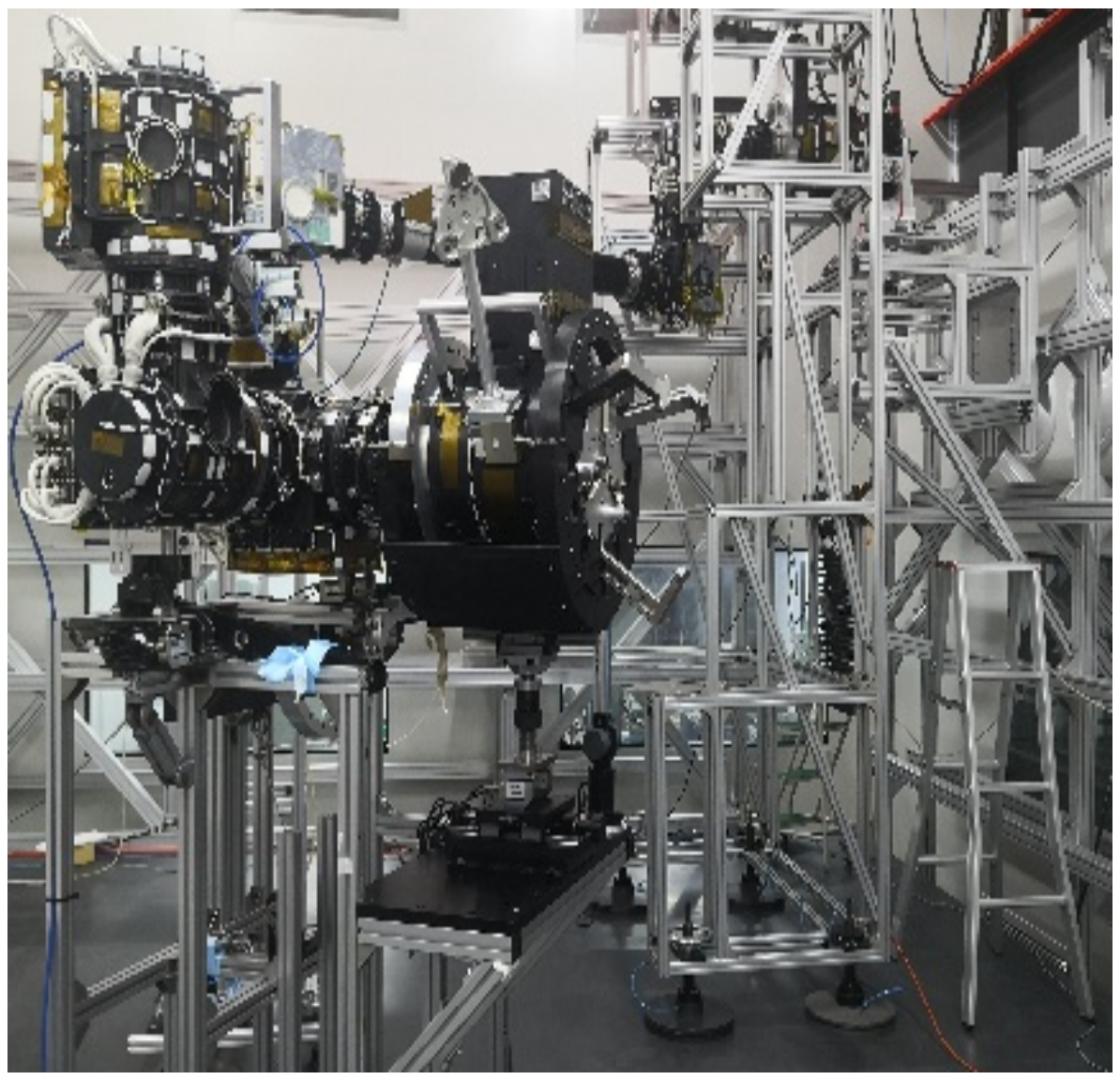
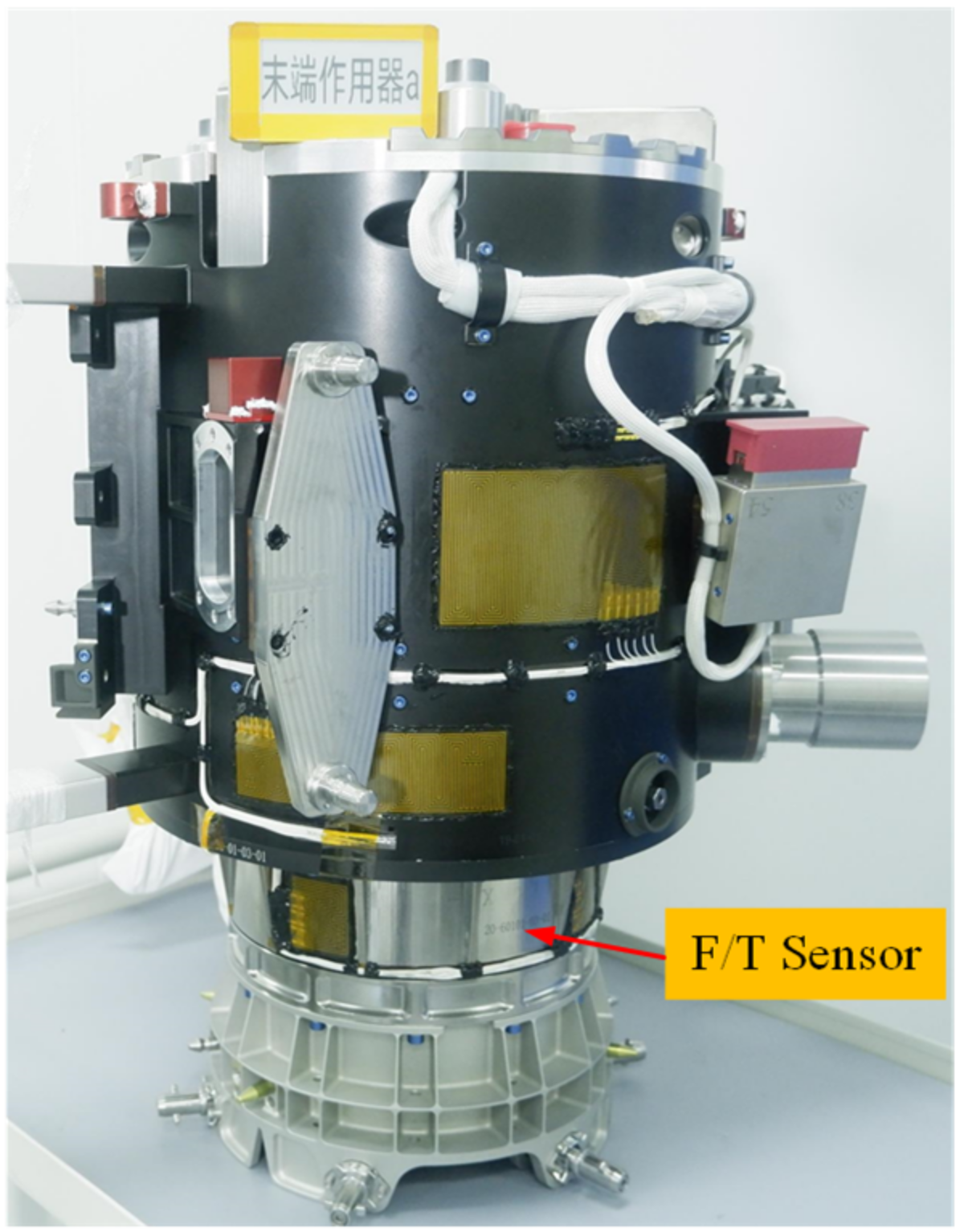
2. Space Manipulator and F/T Sensor
3. F/T Sensor Design
3.1. Measuring Principle
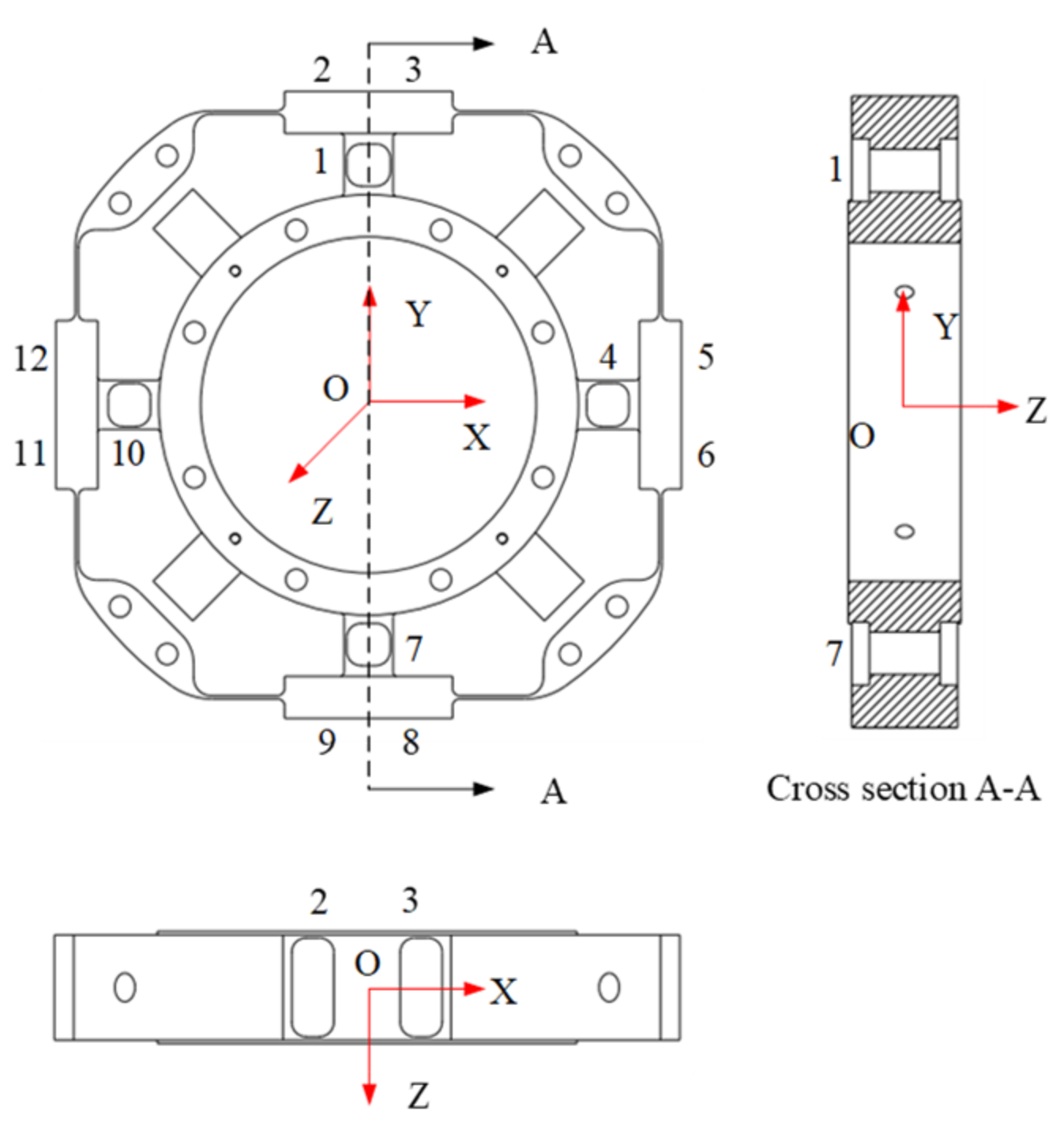
3.2. Sensor Structure Design
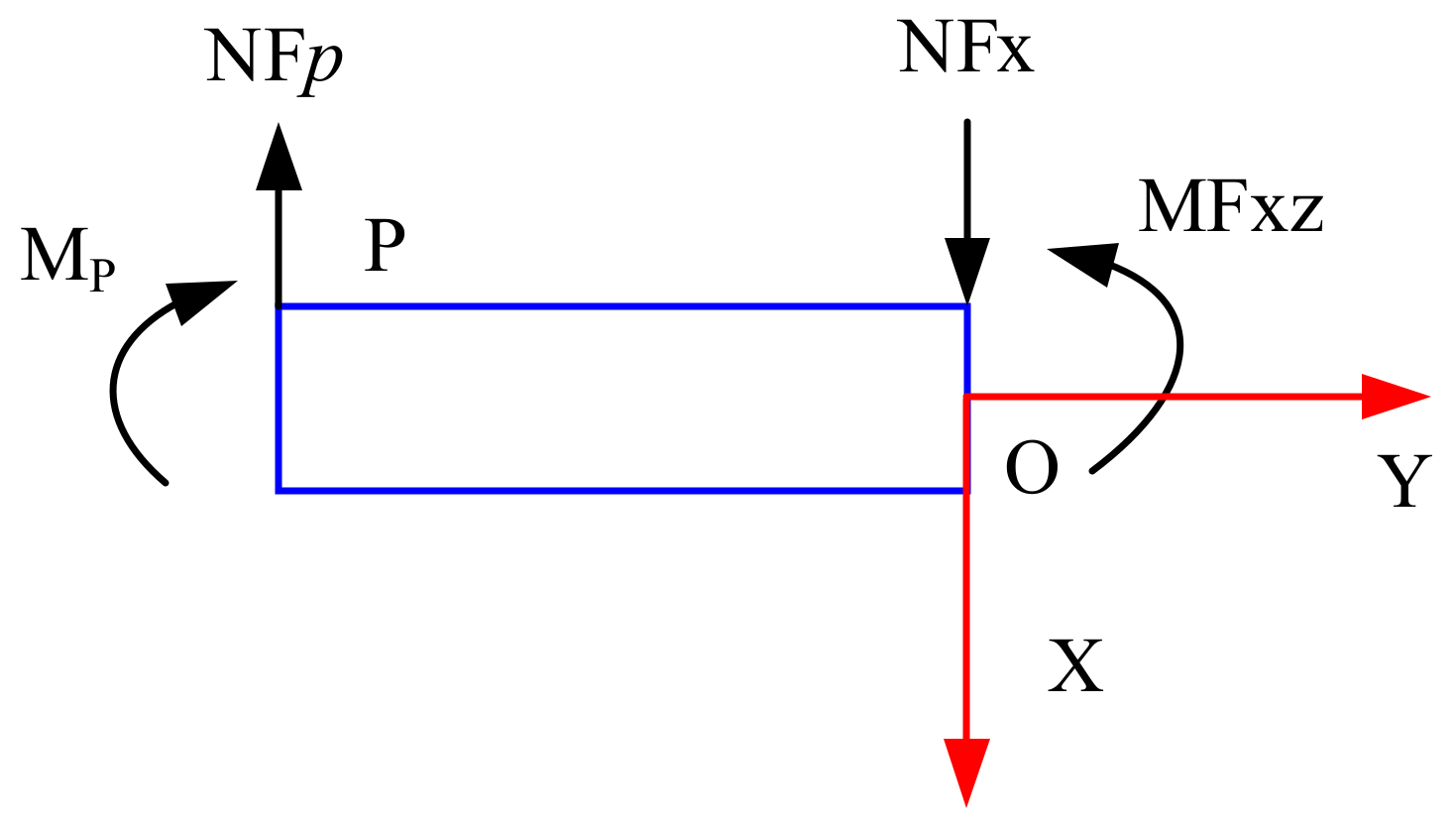
3.3. Strain Analysis Based on Analytical Method
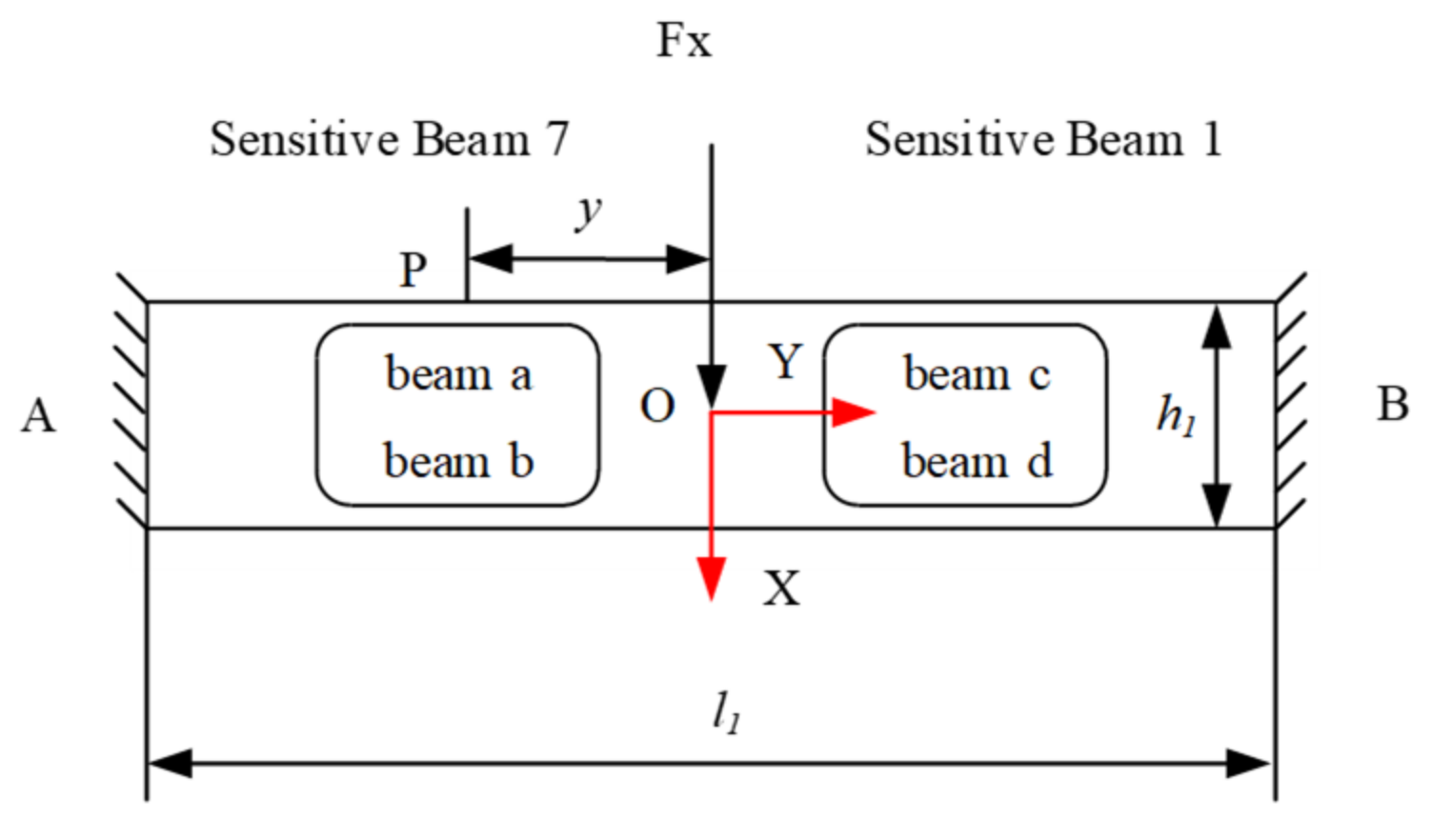
3.3.1. Fx/Fy/Fz Force Analysis
3.3.2. Mx/My/Mz Moment Analysis
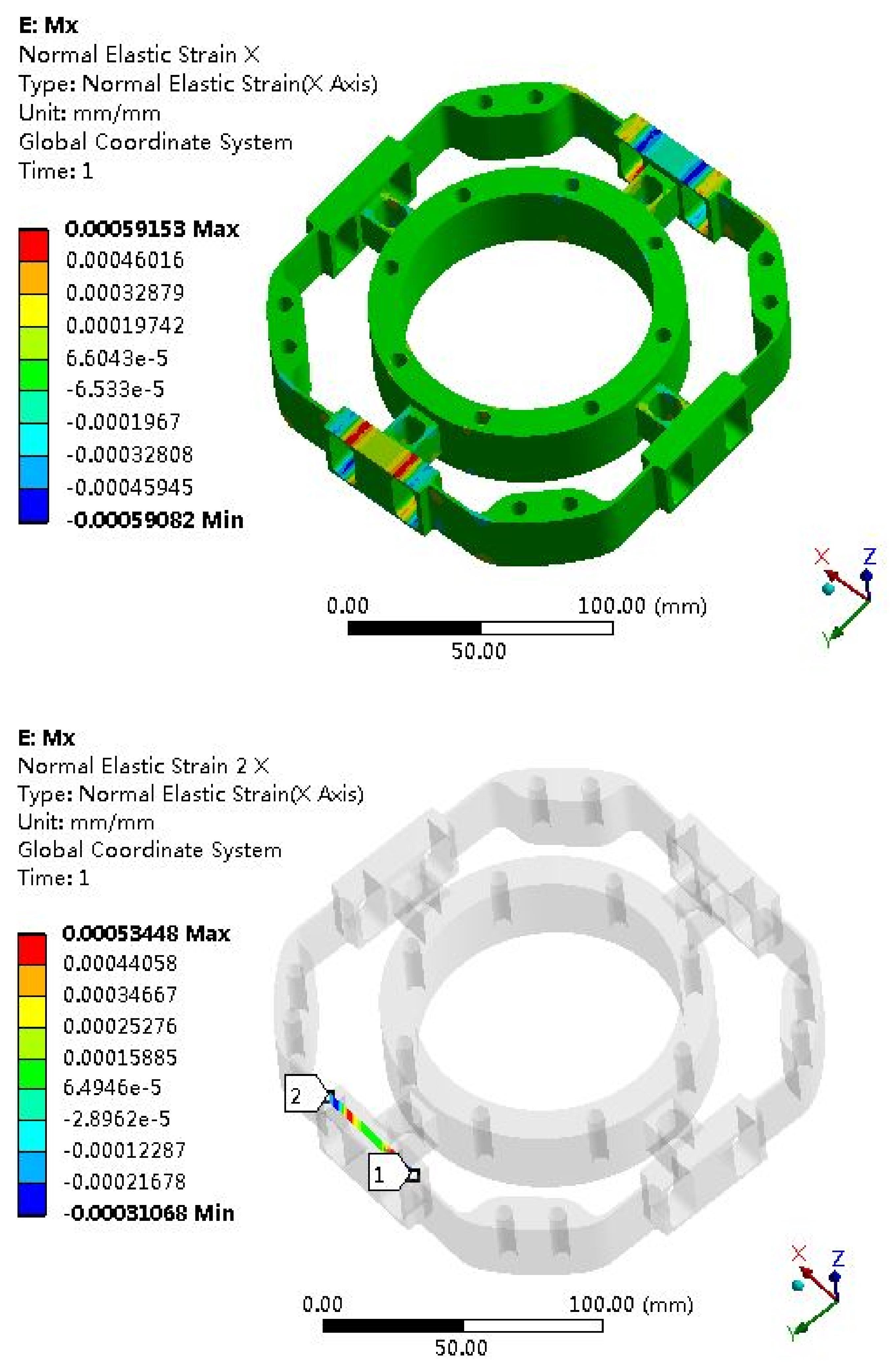
3.4. Strain Analysis by Finite Element Method



3.5. Strain Gauges Selection and Arrangement
3.6. Sensor Electrical System Design
- (1)
- Power module. After filtering the digital 7.5 V power provided by the controller circuit, the voltage is converted into digital 5 V; then, the digital 5 V voltage is converted into digital 2.5V and analog 5V; finally, the analog 5V is converted into analog 2.5 V;
- (2)
- The communication interface module. Through the RS422 serial communication protocol, this realizes the data interaction with the end effector controller;
- (3)
- AD interface module. This realizes eight channels of force/torque, five channels of temperature and three channels of analog reference voltage information collection from the elastomer. The original force/torque signal is amplified by the triple-instrument amplifier circuit, and the filtered signal input goes to the analog-to-digital conversion module to achieve analog-to-digital conversion;
- (4)
- DA interface module. This realizes the compensation voltage and feeds it back to the output terminal of the electric bridge to compensate the zero drift of the F/T sensor.
4. Space Environment Adaptability Design of F/T Sensor
4.1. Mechanical Vibration Design
4.2. Thermal Control Design
4.2.1. Passive Thermal Control
4.2.2. Active Thermal Control
4.3. Anti-Radiation Design
4.3.1. Protection Design of Total Ionization Dose Effect
4.3.2. Single-Event Effect Protection
- (1)
- Single-event upset (SEU) protection
- The main measures are as follows:
- Select FPGA with FLASH structure;
- Optimize circuit structure.
- (2)
- Single-event latch effects (SEL) protection
- A resistance-capacitance network is designed at the power input of the circuit board, a series of current-limiting resistors, and a decoupling tantalum capacitor are used to prevent the power supply from triggering lock due to overvoltage.
- In terms of component selection, anti-locking chips, such as CPU, RAM, PROM, etc., are preferred for important and key components.
- We designed a power supply circuit with the function of preventing SEL to realize the protection of the chip.
- Using multi-layer printed boards, the power supply and ground each occupy one layer, which improves the power supply loop.
- We placed a filter capacitor near the power terminal of the CMOS device. The external signal input terminal does not connect to the CMOS device directly. The external signal CMOS output adopts diode isolation. The input floating pins of all CMOS devices are grounded or connected to the power supply.
5. Manufacture of F/T Sensor
6. Calibration of F/T Sensor
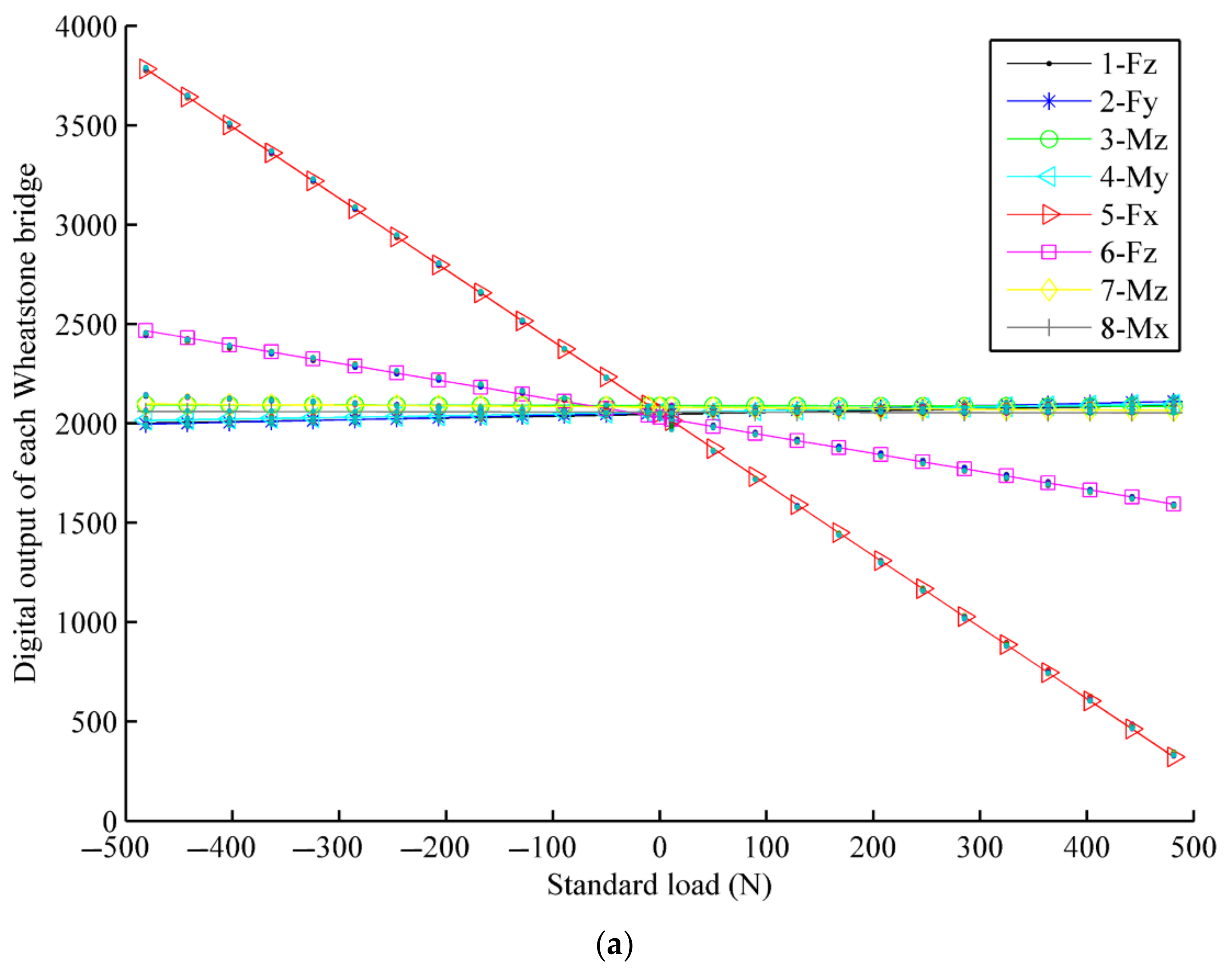
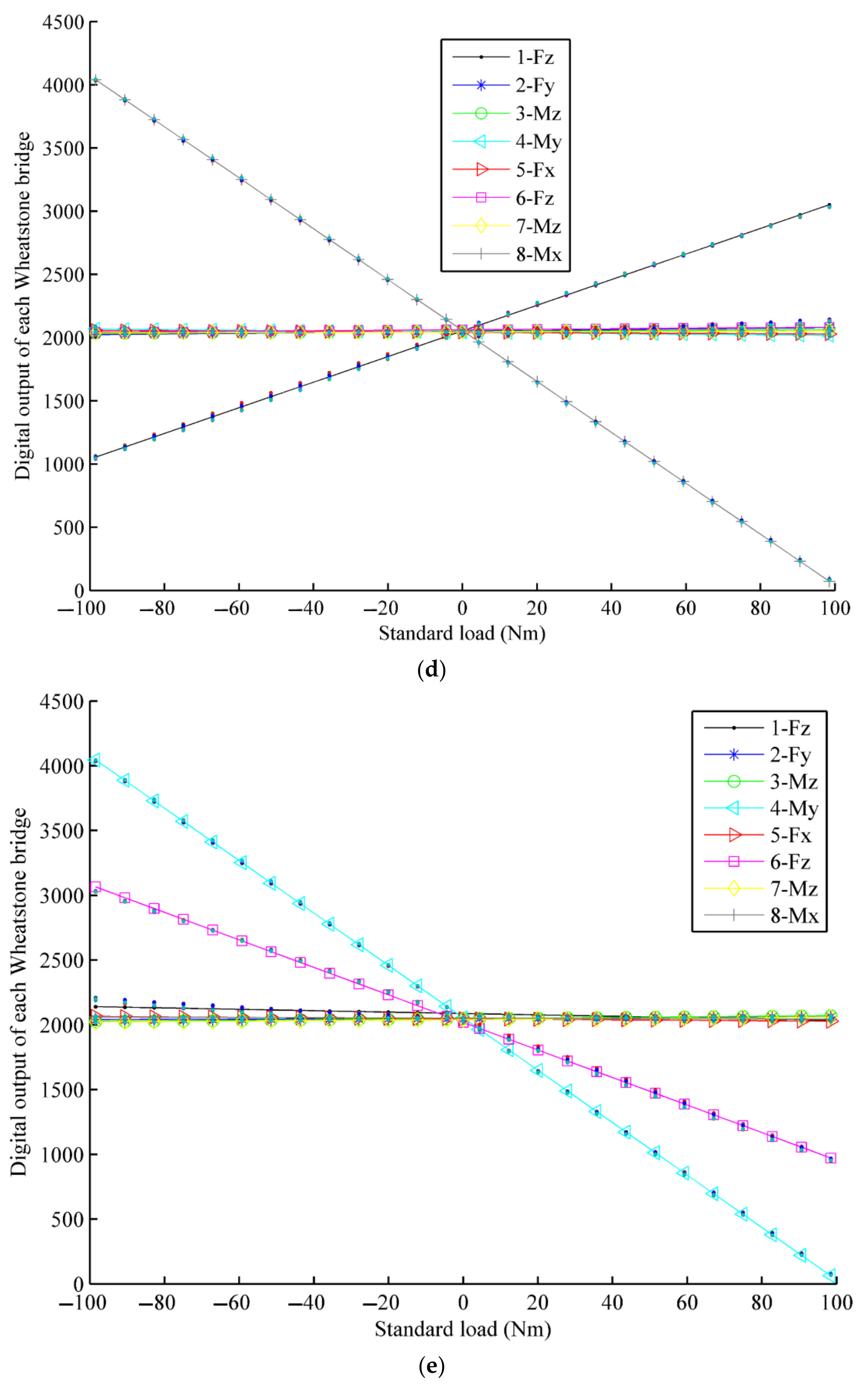
6.1. Calibration F/T Sensor by Experiment
6.2. Error Analysis of Strain Simulation and Experimental Test
7. Sensor Space Environmental Adaptability Test
7.1. Mechanical Vibration Test
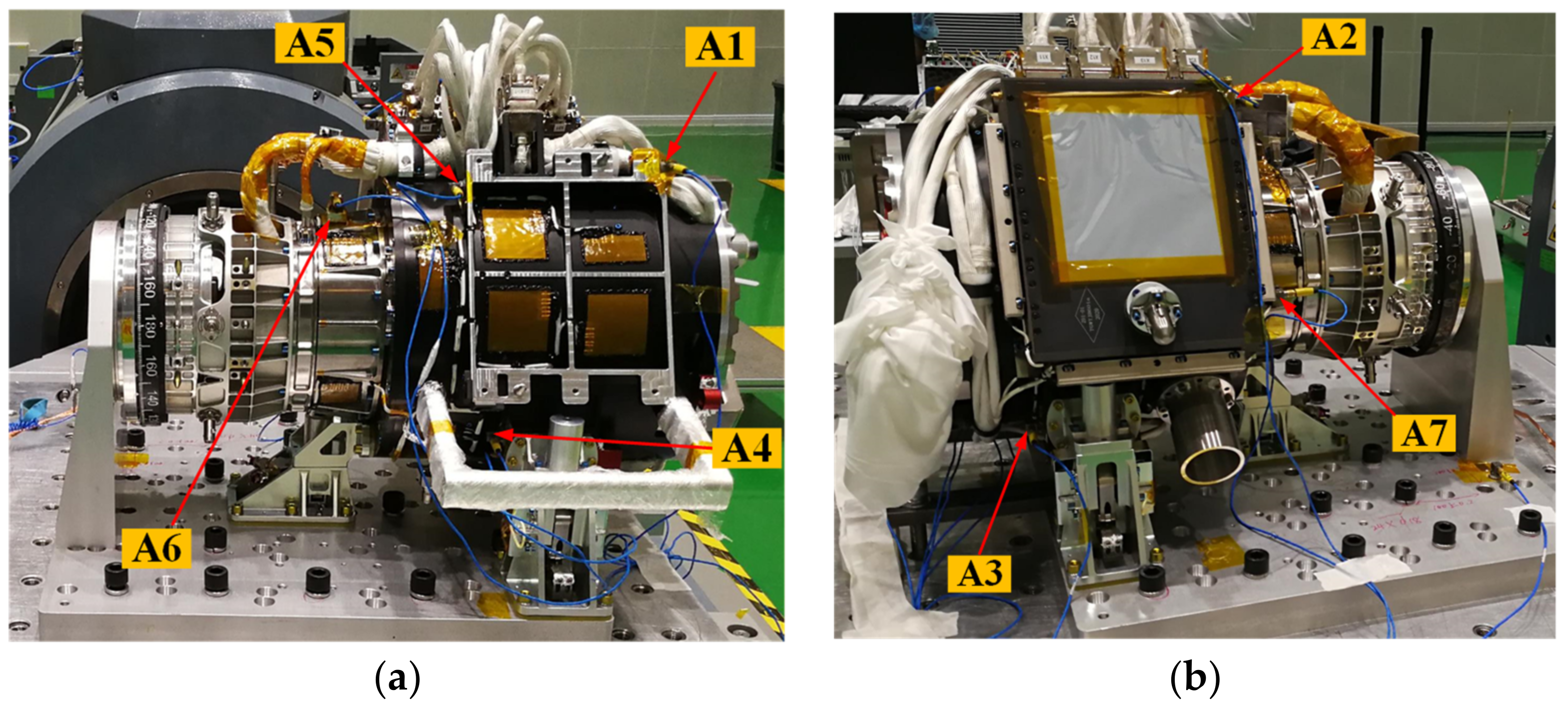
7.1.1. Measuring Acceleration Sensor Layout
7.1.2. Sinusoidal Vibration Test Conditions
7.1.3. Random Vibration Test Conditions
7.1.4. Vibration Test Results
7.2. Thermal Vacuum Environment Test
7.2.1. Thermal Vacuum Test Conditions
- (a)
- Environmental pressure: no more than 1.3 × 10−3 Pa;
- (b)
- Test temperature: The temperature range is −35 °C~+55 °C. The temperature of the heat sink under low-temperature conditions is lower than −70 °C, and the temperature of the heat sink under high-temperature conditions is higher than +20 °C;
- (c)
- Average temperature change rate: not less than 1 °C/min; temperature change rate should be at least >0.5 °C/min (according to equipment capability);
- (d)
- Number of cycles: 3.5 cycles for main part and 2 cycles for backup;
- (e)
- Reference point test temperature tolerance: low temperature is 0 °C~−4 °C and high temperature is +4 °C~0 °C.
7.2.2. Load Simulation Device of Thermal Vacuum Test
7.2.3. Thermal Vacuum Test Results
7.2.4. Force/Torque Information during Grasping and Releasing Progress of EE
8. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, H. An Overview of the Space Robotics Progress in China. In Proceedings of the 12th International Symposium on Artificial Intelligence, Robotics and Automation in Space, Montreal, QC, Canada, 17–19 July 2014; Volume 14, pp. 15–22. [Google Scholar]
- Gibbs, G.; Sachdev, S. Canada and the international space station program: Overview and status. Acta Astronaut. 2002, 51, 591–600. [Google Scholar] [CrossRef]
- Cruijssen, H.J.; Ellenbroek, M.; Henderson, M.; Petersen, H.; Verzijden, P.; Visser, M. The European Robotic Arm: A High-Performance Mechanism Finally on its Way to Space. In Proceedings of the 42nd Aerospace Mechanism Symposium, Baltimore, MD, USA, 14–16 May 2014; pp. 319–334. [Google Scholar]
- Boumans, R.; Heemskerk, C. The European robotic arm for the international space station. Robot. Auton. Syst. 1998, 23, 17–27. [Google Scholar] [CrossRef]
- Kim, J.H. Multi-axis force-torque sensors for measuring zero-moment point in humanoid robots: A review. IEEE Sens. J. 2019, 20, 1126–1141. [Google Scholar] [CrossRef]
- Xiong, L.; Guo, Y.; Jiang, G.; Zhou, X.; Jiang, L.; Liu, H. Six-dimensional force/torque sensor based on fiber Bragg gratings with low coupling. IEEE Trans. Ind. Electron. 2020, 68, 4079–4089. [Google Scholar] [CrossRef]
- Li, K.; Pan, B.; Zhang, F.; Gao, W.; Fu, Y.; Wang, S. A novel 4-DOF surgical instrument with modular joints and 6-Axis Force sensing capability. Int. J. Med. Rob. Comput. Assist. Surg. 2017, 13, e1751. [Google Scholar] [CrossRef] [PubMed]
- Tan, Y.; Wang, X.; Ren, L. Design and experiment of a cardan-type self-decoupled and self-powered bending moment and torque sensor. IEEE Trans. Ind. Electron. 2020, 68, 5366–5375. [Google Scholar] [CrossRef]
- Hosseinabadi, A.H.H.; Black, D.G.; Salcudean, S.E. Ultra low-noise FPGA-based 6-axis optical force-torque sensor: Hardware and software. IEEE Trans. Ind. Electron. 2021, 68, 10207–10217. [Google Scholar] [CrossRef]
- He, Z.; Liu, T. Design of a three-dimensional capacitor-based six-axis force sensor for human-robot interaction. Sens. Actuators A 2021, 331, 112939. [Google Scholar] [CrossRef]
- Eng, S.; Al-Mai, O.; Ahmadi, M. A 6 DoF, wearable, compliant shoe sensor for total ground reaction measurement. IEEE Trans. Instrum. Meas. 2018, 67, 2714–2722. [Google Scholar] [CrossRef]
- Li, Y.J.; Yang, C.; Wang, G.C.; Zhang, H.; Cui, H.Y.; Zhang, Y.L. Research on the parallel load sharing principle of a novel self-decoupled piezoelectric six-dimensional force sensor. ISA Trans. 2017, 70, 447–457. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.J.; Hsu, C.W.; Sue, C.Y. Design and calibration of a dual-frame force and torque sensor. IEEE Sens. J. 2020, 20, 12134–12145. [Google Scholar] [CrossRef]
- Payo, I.; Adánez, J.M.; Rosa, D.R.; Fernandez, R.; Vazquez, A.S. Six-axis column-type force and moment sensor for robotic applications. IEEE Sens. J. 2018, 18, 6996–7004. [Google Scholar] [CrossRef]
- Kang, M.K.; Lee, S.; Kim, J.H. Shape optimization of a mechanically decoupled six-axis force/torque sensor. Sens. Actuators A 2014, 209, 41–51. [Google Scholar] [CrossRef]
- Dwarakanath, T.A.; Bhutani, G. Beam type hexapod structure based six-component force-torque sensor. Mechatronics 2011, 21, 1279–1287. [Google Scholar] [CrossRef]
- Wang, Y.; Zuo, G.; Chen, X.; Liu, L. Strain analysis of six-axis force/torque sensors based on analytical method. IEEE Sens. J. 2017, 17, 4394–4404. [Google Scholar] [CrossRef]
- Gobbi, M.; Previati, G.; Guarneri, P.; Mastinu, G. A new six-axis load cell. Part II: Error analysis, construction and experimental assessment of performances. Exp. Mech. 2011, 51, 389–399. [Google Scholar] [CrossRef]
- Wu, B.; Cai, P. Decoupling analysis of a sliding structure six-axis force/torque sensor. Meas. Sci. Rev. 2013, 13, 187–193. [Google Scholar] [CrossRef]
- Mastinu, G.; Gobbi, M.; Previati, G. A new six-axis load cell. Part I: Design. Exp. Mech. 2011, 51, 373–388. [Google Scholar] [CrossRef][Green Version]
- Sun, Y.; Liu, Y.; Jin, M.; Liu, H. Design and Optimization of a Novel Six-Axis Force/Torque Sensor with Good Isotropy and High Sensitivity. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 631–638. [Google Scholar]
- Park, J.J.; Kim, G.S. Development of the 6-axis force/moment sensor for an intelligent robot’s gripper. Sens. Actuators A 2005, 118, 127–134. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Fx | Fy | Fz | Mx | My | Mz |
|---|---|---|---|---|---|---|
| Range(N/Nm) | ±500 | ±500 | ±500 | ±100 | ±100 | ±100 |
| Linearity | 1.25% | 0.56% | 2.60% | 0.92% | 0.91% | 1.63% |
| Hysteresis | 0.93% | 0.73% | 1.42% | 0.63% | 0.59% | 1.07% |
| Stability | 0.10% | 0.10% | 0.39% | 0.10% | 0.10% | 0.10% |
| Repeatability | 0.49% | 1.07% | 0.82% | 1.41% | 1.72% | 1.17% |
| Accuracy | 0.75% | 0.53% | 1.18% | 0.49% | 0.53% | 0.84% |
| Coupling Error (%) | ||||||
|---|---|---|---|---|---|---|
| Fx | Fy | Fz | Mx | My | Mz | |
| Fx | - | −0.33 | −0.06 | 0.07 | 0.35 | 0.23 |
| Fy | −0.27 | - | −0.32 | −0.02 | −0.33 | 1.24 |
| Fz | 0.50 | 0.54 | - | −0.78 | −0.26 | 0.05 |
| Mx | 0.02 | 0.36 | −0.36 | - | 0.59 | −0.20 |
| My | −0.32 | 0.34 | −0.14 | −0.08 | - | 0.06 |
| Mz | −1.81 | −1.15 | 0.54 | 0.43 | 0.48 | - |
| Bridge 1-Fz | Bridge 2-Fy | Bridge 3-Mz | Bridge 4-My | Bridge 5-Fx | Bridge 6-Fz | Bridge 7-Mz | Bridge 8-Mx | |
|---|---|---|---|---|---|---|---|---|
| Simulation | 384.8 μ | 1014.2 μ | 1376.5 μ | 1690.3 μ | 1014.2 μ | 384.8 μ | 1376.5 μ | 1690.3 μ |
| Test | 365.4 μ | 948.0 μ | 1269.9 μ | 1743.8 μ | 924.0 μ | 394.4 μ | 1252.8 μ | 1736.7 μ |
| Error | −5.04% | −6.53% | −7.74% | 3.17% | −8.89% | 2.49% | −8.99% | 2.75% |
| Parameter Name | Reference | |||||||
|---|---|---|---|---|---|---|---|---|
| Frequency Range (Hz) | ||||||||
| 5~10 | 10~17 | 17~25 | 25~45 | 45~75 | 75~100 | |||
| Amplitude 0-p | X, Y, Z direction | Acceptance level | 8.5 mm | 3.4 g | 4.0 g | 9.5 g | 3.0 g | 3.9 g |
| Load scan rate | Acceptance level | 4 oct/min | ||||||
| Loading direction | Three axis | |||||||
| Parameter Name | Reference | ||||
|---|---|---|---|---|---|
| Frequency Range (Hz) | Total Root Mean Square(grms) | ||||
| 10–250 Hz | 250–600 Hz | 600–2000 Hz | |||
| Power Spectral Density | Acceptance level (X,Y,Z) | 6 dB/Oct | 0.06 g2/Hz | −9 dB/Oct | 6.5 grms |
| Duration of each direction | Acceptance level | 60 s | |||
| Loading direction | Three axis | ||||
| Direction | Measuring Point | Acceptance Grade Sine | Direction | Measuring Point | Acceptance Grade Sine | Direction | Measuring Point | Acceptance Grade Sine | |||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Frequency (Hz) | Acceleration (g) | Frequency (Hz) | Acceleration (g) | Frequency (Hz) | Acceleration (g) | ||||||
| X | A1 | 44.98 | 10.39 | Y | A1 | 99.72 | 12.34 | Z | A1 | 34.51 | 10.72 |
| A2 | 44.98 | 10.25 | A2 | 99.72 | 13.00 | A2 | 34.66 | 10.31 | |||
| A3 | 44.98 | 9.76 | A3 | 43.75 | 9.76 | A3 | 34.71 | 11.19 | |||
| A4 | 44.78 | 9.74 | A4 | 44.98 | 9.80 | A4 | 34.46 | 10.20 | |||
| A5 | 45.11 | 10.26 | A5 | 99.72 | 11.80 | A5 | 34.31 | 10.06 | |||
| A6 | 44.98 | 10.15 | A6 | 99.72 | 10.93 | A6 | 34.61 | 9.94 | |||
| A7 | 44.98 | 9.91 | A7 | 44.72 | 10.27 | A7 | 34.71 | 10.15 | |||
| Direction | Measuring Point | Direction | Acceptance Level Random | Direction | Measuring Point | Direction | Acceptance Level Random | Direction | Measuring Point | Direction | Acceptance Level Random |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Root Mean Square Acceleration (grms) | Root Mean Square Acceleration (grms) | Root Mean Square Acceleration (grms) | |||||||||
| X | A1 | X | 20.05 | Y | A1 | X | 14.63 | Z | A1 | X | 16.71 |
| Y | 6.49 | Y | 8.12 | Y | 9.04 | ||||||
| Z | 9.69 | Z | 12.10 | Z | 11.80 | ||||||
| A2 | X | 11.15 | A2 | X | 5.42 | A2 | X | 8.49 | |||
| Y | 6.39 | Y | 7.30 | Y | 7.85 | ||||||
| Z | 4.92 | Z | 5.31 | Z | 11.04 | ||||||
| A3 | X | 8.81 | A3 | X | 7.48 | A3 | X | 9.13 | |||
| Y | 3.81 | Y | 8.24 | Y | 6.41 | ||||||
| Z | 7.20 | Z | 7.12 | Z | 8.40 | ||||||
| A4 | X | 9.40 | A4 | X | 7.31 | A4 | X | 8.07 | |||
| Y | 4.34 | Y | 7.93 | Y | 5.53 | ||||||
| Z | 6.58 | Z | 5.53 | Z | 7.86 | ||||||
| A5 | X | 9.37 | A5 | X | 4.79 | A5 | X | 7.31 | |||
| Y | 4.29 | Y | 5.25 | Y | 5.05 | ||||||
| Z | 6.22 | Z | 5.51 | Z | 10.05 | ||||||
| A6 | X | 8.52 | A6 | X | 4.32 | A6 | X | 7.22 | |||
| Y | 6.38 | Y | 8.87 | Y | 9.11 | ||||||
| Z | 3.85 | Z | 5.74 | Z | 11.98 | ||||||
| A7 | X | 7.31 | A7 | X | 3.95 | A7 | X | 5.57 | |||
| Y | 4.97 | Y | 8.24 | Y | 7.34 | ||||||
| Z | 5.25 | Z | 5.76 | Z | 12.60 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y. Design, Manufacture, Test and Experiment of Six-Axis Force Torque Sensor for Chinese Experimental Module Manipulator. Sensors 2022, 22, 3603. https://doi.org/10.3390/s22093603
Sun Y. Design, Manufacture, Test and Experiment of Six-Axis Force Torque Sensor for Chinese Experimental Module Manipulator. Sensors. 2022; 22(9):3603. https://doi.org/10.3390/s22093603
Chicago/Turabian StyleSun, Yongjun. 2022. "Design, Manufacture, Test and Experiment of Six-Axis Force Torque Sensor for Chinese Experimental Module Manipulator" Sensors 22, no. 9: 3603. https://doi.org/10.3390/s22093603
APA StyleSun, Y. (2022). Design, Manufacture, Test and Experiment of Six-Axis Force Torque Sensor for Chinese Experimental Module Manipulator. Sensors, 22(9), 3603. https://doi.org/10.3390/s22093603