
Vision-Based Pedestrian’s Crossing Risky Behavior Extraction and Analysis for Intelligent Mobility Safety System



Abstract
:1. Introduction
- Literature Review: Reviewing the related works for vehicle–pedestrian’s risky behavior analysis and vision-based traffic safety system.
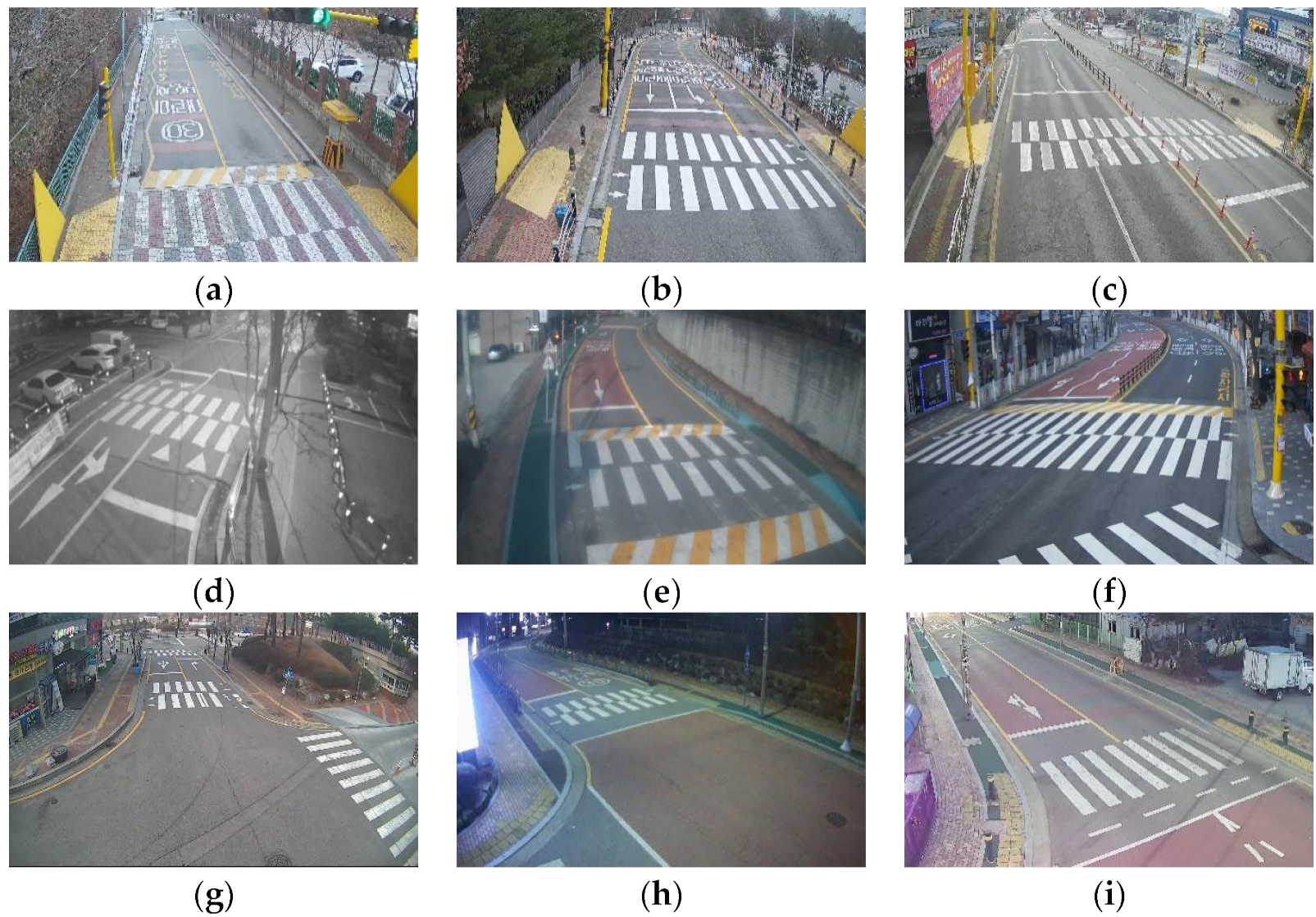
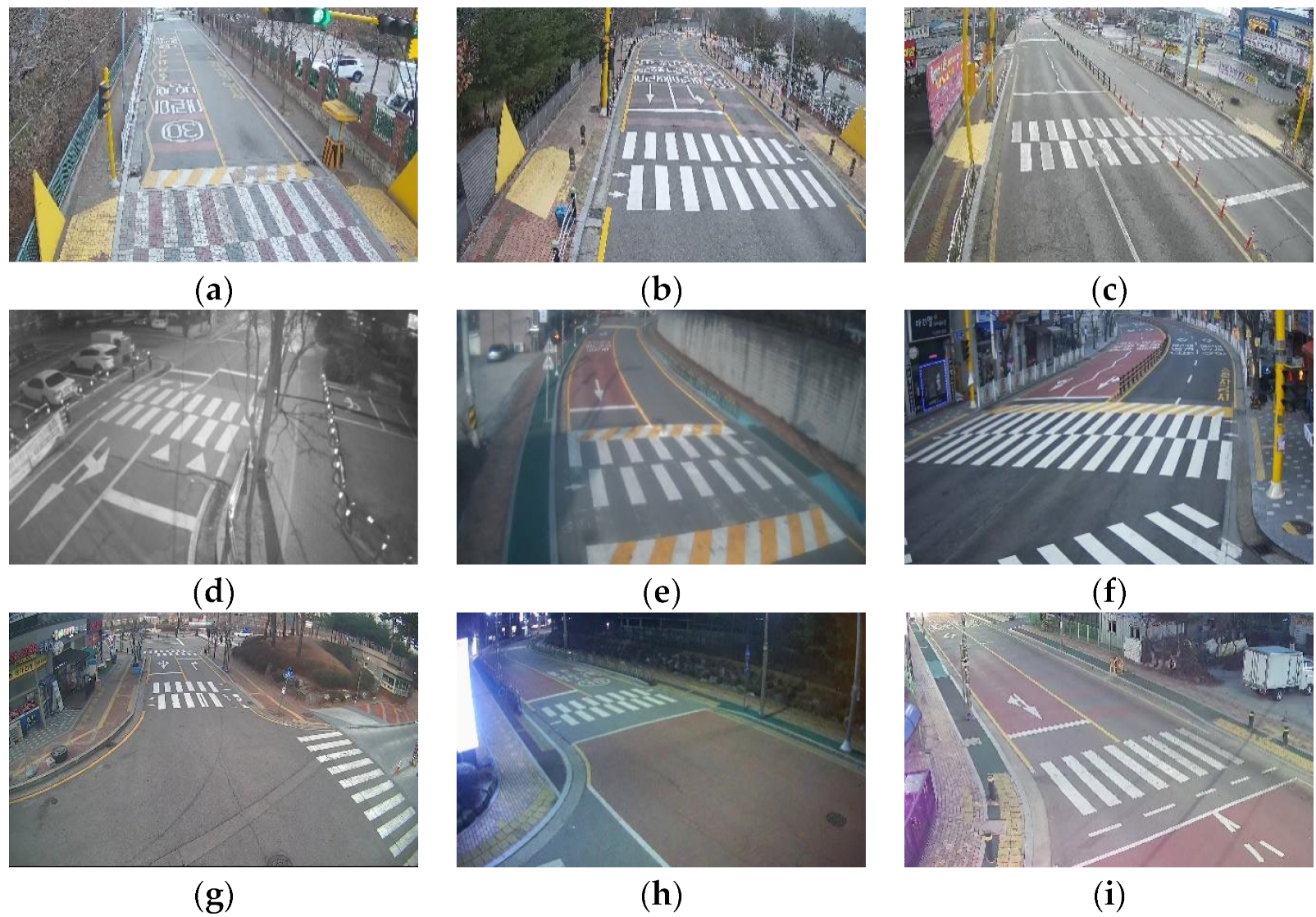
- Data Arrangement: Description of test spots and overview of the video dataset and preprocessing methods.
- Potential Collision Risky Behavior Extraction: Description of methods for object’s behavioral extraction.
- Performance Evaluation: Validation of preprocessing results.
- Analysis of Potential Collision Risky Behaviors: Analysis of the objects’ behavioral features by spots, and discussion of results and limitations.
- Conclusion: Summary of our study and future research directions.
2. Materials and Methods
2.1. Vehicle–Pedestrian’s Risky Behavior Analysis
2.2. Vision-Based Traffic Safety System
3. Data Arrangement
3.1. Data Sources
3.2. Preprocessing
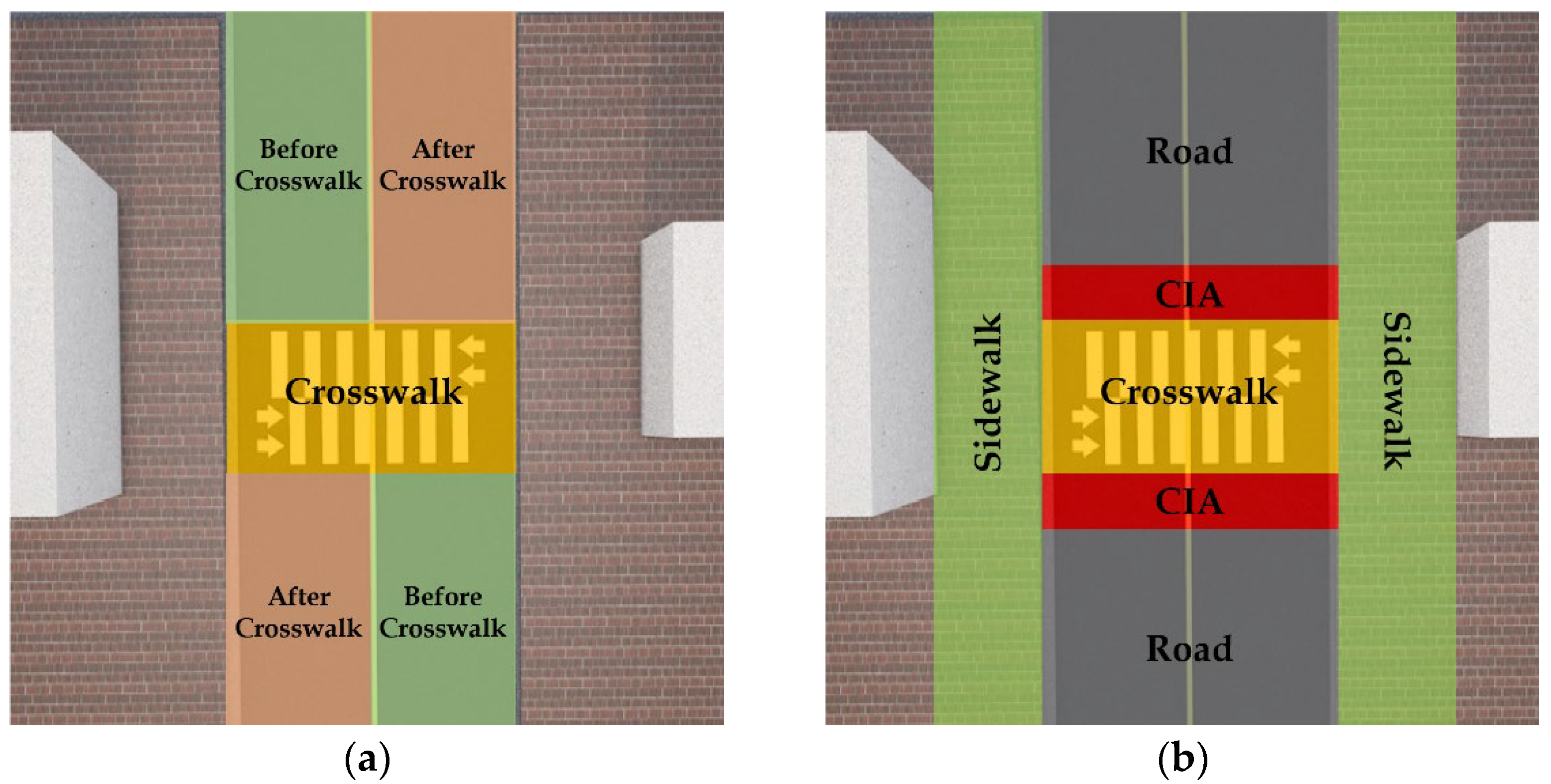
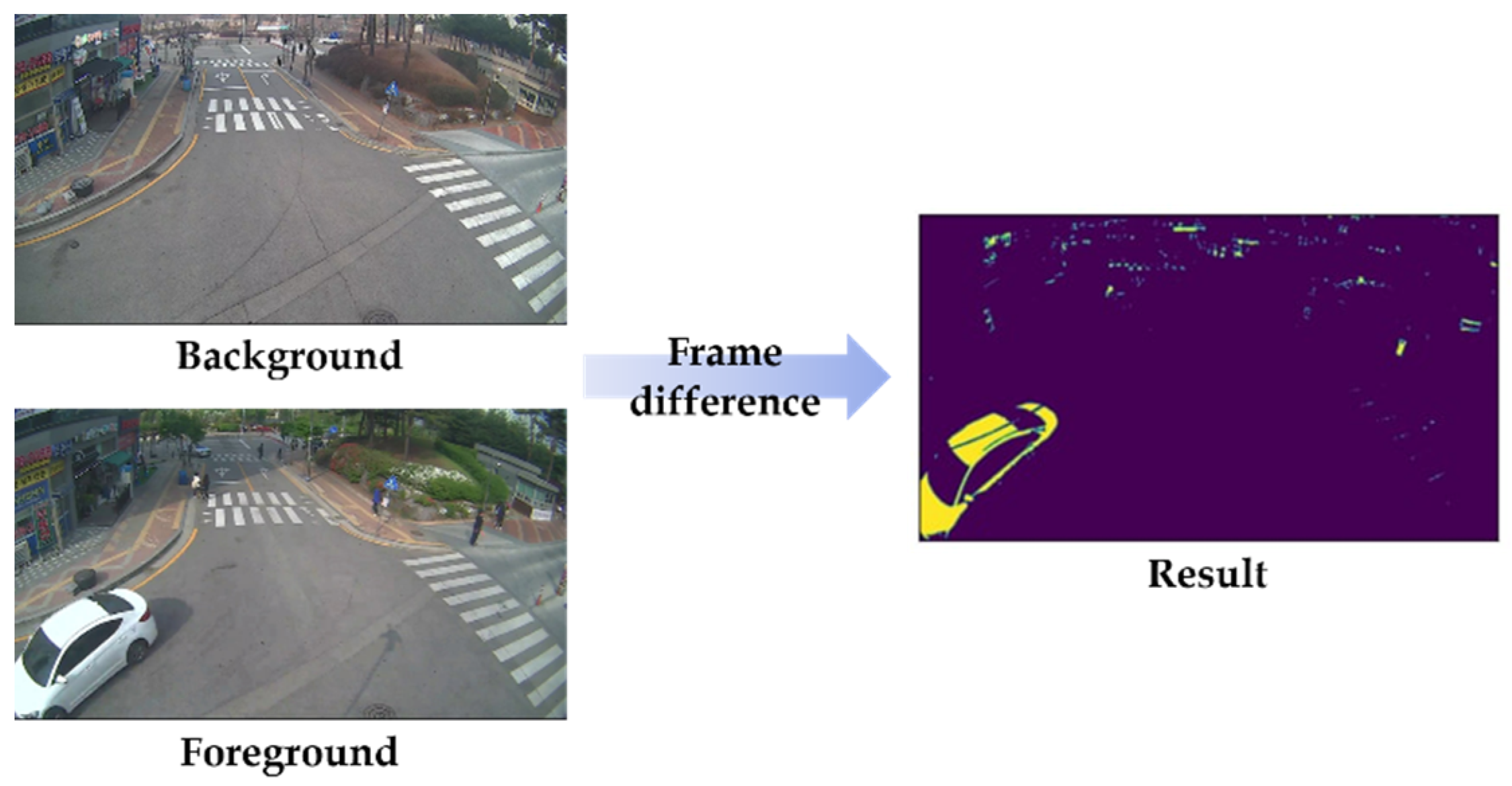
3.2.1. Motioned-Scene Partitioning
3.2.2. Object Detection in Overhead View
3.2.3. Object Tracking
4. Potential Collision Risky Behavior Extraction
5. Performance Evaluation
5.1. Experimental Design
- Connectivity: Are all of the objects connected in consecutive frames without breaks?
- Crossing: Are two or more objects, moving in parallel, traced separately without intertwining?
- Directivity: Do the objects follow their own paths without invading others’ trajectories? This phenomenon may occur more frequently when adjusting the threshold.
5.2. Result
5.2.1. Evaluation of Object Tracking Algorithm
5.2.2. Evaluation of Behavior Extraction Method
6. Analysis of Potential Collision Risky Behaviors
6.1. Analyzing Vehicles’ Speeds and PSMs by Spots
6.2. Analyzing Pedestrian’s Potential Risk near Crosswalks Based on Car Stopping Behaviors
6.3. Analyzing Car Behaviors with PSM and Car Stopping near the Unsignalized Crosswalk
6.4. Discussions
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ho, G.T.S.; Tsang, Y.P.; Wu, C.H.; Wong, W.H.; Choy, K.L. A computer vision-based roadside occupation surveillance system for intelligent transport in smart cities. Sensors 2019, 19, 1796. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lytras, M.D.; Visvizi, A. Who uses smart city services and what to make of it: Toward interdisciplinary smart cities research. Sustainability 2018, 10, 1998. [Google Scholar] [CrossRef] [Green Version]
- Akhter, F.; Khadivizand, S.; Siddiquei, H.R.; Alahi, M.E.E.; Mukhopadhyay, S. Iot enabled intelligent sensor node for smart city: Pedestrian counting and ambient monitoring. Sensors 2019, 19, 3374. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, Y.; Ning, M. Study on the Risk Ratio of Pedestrians’ Crossing at Unsignalized Crosswalk. CICTP 2015 Efficient, Safe, and Green Multimodal Transportation. In Proceedings of the 15th COTA International Conference of Transportation Professionals, Beijing, China, 24–27 July 2015; pp. 2792–2803. [Google Scholar] [CrossRef]
- Gandhi, T.; Trivedi, M.M. Pedestrian protection systems: Issues, survey, and challenges. IEEE Trans. Intell. Transp. Syst. 2007, 8, 413–430. [Google Scholar] [CrossRef] [Green Version]
- Gitelman, V.; Balasha, D.; Carmel, R.; Hendel, L.; Pesahov, F. Characterization of pedestrian accidents and an examination of infrastructure measures to improve pedestrian safety in Israel. Accid. Anal. Prev. 2012, 44, 63–73. [Google Scholar] [CrossRef]
- Olszewski, P.; Szagała, P.; Wolański, M.; Zielińska, A. Pedestrian fatality risk in accidents at unsignalized zebra crosswalks in Poland. Accid. Anal. Prev. 2015, 84, 83–91. [Google Scholar] [CrossRef]
- Haleem, K.; Alluri, P.; Gan, A. Analyzing pedestrian crash injury severity at signalized and non-signalized locations. Accid. Anal. Prev. 2015, 81, 14–23. [Google Scholar] [CrossRef]
- Fu, T.; Hu, W.; Miranda-Moreno, L.; Saunier, N. Investigating secondary pedestrian-vehicle interactions at non-signalized intersections using vision-based trajectory data. Transp. Res. Part C Emerg. Technol. 2019, 105, 222–240. [Google Scholar] [CrossRef]
- Fu, T.; Miranda-Moreno, L.; Saunier, N. A novel framework to evaluate pedestrian safety at non-signalized locations. Accid. Anal. Prev. 2018, 111, 23–33. [Google Scholar] [CrossRef]
- Ke, R.; Lutin, J.; Spears, J.; Wang, Y. A Cost-Effective Framework for Automated Vehicle-Pedestrian Near-Miss Detection Through Onboard Monocular Vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Honolulu, HI, USA, 21–26 July 2017; pp. 898–905. [Google Scholar] [CrossRef]
- Murphy, B.; Levinson, D.M.; Owen, A. Evaluating the Safety in Numbers effect for pedestrians at urban intersections. Accid. Anal. Prev. 2017, 106, 181–190. [Google Scholar] [CrossRef]
- Kadali, B.R.; Vedagiri, P. Proactive pedestrian safety evaluation at unprotected mid-block crosswalk locations under mixed traffic conditions. Saf. Sci. 2016, 89, 94–105. [Google Scholar] [CrossRef]
- Jiang, X.; Wang, W.; Bengler, K.; Guo, W. Analyses of pedestrian behavior on mid-block unsignalized crosswalk comparing Chinese and German cases. Adv. Mech. Eng. 2015, 7, 1687814015610468. [Google Scholar] [CrossRef]
- Oxley, J.A.; Ihsen, E.; Fildes, B.N.; Charlton, J.L.; Day, R.H. Crossing roads safely: An experimental study of age differences in gap selection by pedestrians. Accid. Anal. Prev. 2005, 37, 962–971. [Google Scholar] [CrossRef] [PubMed]
- Onelcin, P.; Alver, Y. The crossing speed and safety margin of pedestrians at signalized intersections. Transp. Res. Procedia 2017, 22, 3–12. [Google Scholar] [CrossRef]
- Wu, J.; Xu, H.; Zheng, Y.; Tian, Z. A novel method of vehicle-pedestrian near-crash identification with roadside LiDAR data. Accid. Anal. Prev. 2018, 121, 238–249. [Google Scholar] [CrossRef] [PubMed]
- Stoker, P.; Garfinkel-Castro, A.; Khayesi, M.; Odero, W.; Mwangi, M.N.; Peden, M.; Ewing, R. Pedestrian safety and the built environment: A review of the risk factors. J. Plan. Lit. 2015, 30, 377–392. [Google Scholar] [CrossRef]
- Wu, J.; Xu, H.; Zhang, Y.; Sun, R. An improved vehicle-pedestrian near-crash identification method with a roadside LiDAR sensor. J. Saf. Res. 2020, 73, 211–224. [Google Scholar] [CrossRef]
- Matsui, Y.; Hitosugi, M.; Takahashi, K.; Doi, T. Situations of car-to-pedestrian contact. Traffic Inj. Prev. 2013, 14, 73–77. [Google Scholar] [CrossRef]
- Noh, B.; Ka, D.; Lee, D.; Yeo, H. Analysis of Vehicle–Pedestrian Interactive Behaviors near Unsignalized Crosswalk. Transp. Res. Rec. 2021, 2675, 494–505. [Google Scholar] [CrossRef]
- Kim, U.H.; Ka, D.; Yeo, H.; Kim, J.H. A Real-time Vision Framework for Pedestrian Behavior Recognition and Intention Prediction at Intersections Using 3D Pose Estimation. arXiv preprint 2020, arXiv:2009.10868. [Google Scholar]
- Noh, B.; No, W.; Lee, J.; Lee, D. Vision-based potential pedestrian risk analysis on unsignalized crosswalk using data mining techniques. Appl. Sci. 2020, 10, 1057. [Google Scholar] [CrossRef] [Green Version]
- National Law Information Center. Available online: http://www.law.go.kr/lsSc.do?tabMenuId=tab18&query=#J5:13] (accessed on 5 May 2020).
- Liu, H.; Dai, J.; Wang, R.; Zheng, H.; Zheng, B. Combining background substraction and three-frame difference to detect moving object from underwater video. In OCEANS 2016-Shanghai; IEEE: Piscataway, NJ, USA, 2016; pp. 1–5. [Google Scholar]
- Sengar, S.S.; Mukhopadhyay, S. Moving object detection based on frame difference and W4. Signal Image Video Process. 2017, 11, 1357–1364. [Google Scholar] [CrossRef]
- COCO Dataset. Available online: http://cocodataset.org/#home (accessed on 3 September 2019).
- Facebook AI Research. Available online: https://ai.facebook.com/ (accessed on 17 January 2020).
- Noh, B.; No, W.; Lee, D. Vision-Based Overhead Front Point Recognition of Vehicles for Traffic Safety Analysis. UbiComp/ISWC 2018-Adjunct. In Proceedings of the 2018 ACM International Joint Conference on Pervasive and Ubiquitous Computing and 2018 ACM International Symposium on Wearable Computers, Singapore, 8–12 October 2018; pp. 1096–1102. [Google Scholar] [CrossRef]
- Guan, Y.; Penghui, S.; Jie, Z.; Daxing, L.; Canwei, W. A review of moving object trajectory clustering algorithms. Artif. Intell. Rev. 2017, 47, 123–144. Available online: https://link.springer.com/content/pdf/10.1007%2Fs10462-016-9477-7.pdf (accessed on 1 April 2022).
- Besse, P.C.; Guillouet, B.; Loubes, J.M.; Royer, F. Review and Perspective for Distance-Based Clustering of Vehicle Trajectories. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3306–3317. [Google Scholar] [CrossRef] [Green Version]
- Zuo, S.; Jin, L.; Chung, Y.; Park, D. An index algorithm for tracking pigs in pigsty. Ind. Electron. Eng. 2014, 1, 797–804. [Google Scholar] [CrossRef] [Green Version]
- Haroun, B.; Sheng, L.Q.; Shi, L.H.; Sebti, B. Vision Based People Tracking System. Int. J. Comput. Inf. Eng. 2019, 13, 582–586. [Google Scholar]
- Sun, X.; Yao, H.; Zhang, S. A refined particle filter method for contour tracking. Vis. Commun. Image Process. 2010, 7744, 77441M. [Google Scholar] [CrossRef]
- Stocker. Pedestrian Safety and the Built Environment. 2015. Available online: https://www.researchgate.net/publication/281089650_Pedestrian_Safety_and_the_Built_Environment_A_Review_of_the_Risk_Factors (accessed on 1 April 2022).
- Jeppsson, H.; Östling, M.; Lubbe, N. Real life safety benefits of increasing brake deceleration in car-to-pedestrian accidents: Simulation of Vacuum Emergency Braking. Accid. Anal. Prev. 2018, 111, 311–320. [Google Scholar] [CrossRef]
- Figliozzi, M.A.; Tipagornwong, C. Pedestrian Crosswalk Law: A study of traffic and trajectory factors that affect non-compliance and stopping distance. Accid. Anal. Prev. 2016, 96, 169–179. [Google Scholar] [CrossRef]
- Fu, T. A Novel Apporach to Investigate Pedestrian Safety in Non-Signalized Crosswalk Environmets and Related Treatments; McGill University: Montréal, QC, Canada, 2019. [Google Scholar]
- Sisiopiku, V.P.; Akin, D. Pedestrian behaviors at and perceptions towards various pedestrian facilities: An examination based on observation and survey data. Transp. Res. Part F Traffic Psychol. Behav. 2003, 6, 249–274. [Google Scholar] [CrossRef]
- Sinclair, J.; Taylor, P.J.; Hobbs, S.J. Digital filtering of three-dimensional lower extremity kinematics: An assessment. J. Hum. Kinet. 2013, 39, 25–36. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Widmann, A.; Schröger, E.; Maess, B. Digital filter design for electrophysiological data—A practical approach. J. Neurosci. Method. 2014, 250, 34–46. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Avinash, C.; Jiten, S.; Arkatkar, S.; Gaurang, J.; Manoranjan, P. Evaluation of pedestrian safety margin at mid-block crosswalks in India. Saf. Sci. 2018, 119, 188–198. [Google Scholar] [CrossRef]
- Chu, X.; Baltes, M.R. Pedestrian Mid-Block Crossing Difficulty Final Report; National Center for Transit Research, University of South Florida: Tampa, FL, USA, 2001; p. 79. [Google Scholar]
- Lobjois, R.; Cavallo, V. Age-related differences in street-crossing decisions: The effects of vehicle speed and time constraints on gap selection in an estimation task. Accid. Anal. Prev. 2007, 39, 934–943. [Google Scholar] [CrossRef] [PubMed]
- Almodfer, R.; Xiong, S.; Fang, Z.; Kong, X.; Zheng, S. Quantitative analysis of lane-based pedestrian-vehicle conflict at a non-signalized marked crosswalk. Transp. Res. Part F Traffic Psychol. Behav. 2016, 42, 468–478. [Google Scholar] [CrossRef] [Green Version]
- Bullough, J.D.; Skinner, N.P. Pedestrian Safety Margins under Different Types of Headlamp Illumination; Rensselaer Polytechnic Institute, Lighting Research Center: Troy, NY, USA, 2009; pp. 1–14. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spot Code | Cam. Name | Crosswalk Length (m) | School Zone | Speed Cam. | The Number of Lanes | Signal Light | Speed Limit (km/h) | Frame Size | Frame-per-Sec (FPS) |
|---|---|---|---|---|---|---|---|---|---|
| A | Unam Elementary school, back gate #2 | about 8 m | + | × | 2 | × | 30 km/h | 1920 × 1080 | 25 |
| B | Yangsan Elementary school, main gate #1 | about 11 m | + | × | 3 | × | 30 km/h | 1920 × 1080 | 25 |
| C | Gohyeon Elementary school, back gate #2 | about 20 m | + | × | 4 | × | 30 km/h | 1920 × 1080 | 25 |
| D | Municipal Southern Welfare/Daycare center #3 | about 7 m | + | × | 2 | + | 30 km/h | 1280 × 720 | 30 |
| E | iFun daycare center #2 | about 8 m | + | × | 2 | + | 30 km/h | 1280 × 720 | 30 |
| F | Daeho Elementary school opposite side #3 | about 23 m | + | + | 4 | × | 30 km/h | 1280 × 720 | 30 |
| G | Segyo complex #9 back gate #2 | about 8 m | × | × | 2 | + | 30 km/h | 1280 × 720 | 15 |
| H | iNoritor daycare center #2 | about 8 m | + | × | 2 | + | 30 km/h | 1280 × 720 | 11 |
| I | Kids-mom daycare center #3 | about 7 m | + | × | 2 | + | 30 km/h | 1920 × 1080 | 25 |
| Spot Code | The Number of Scenes (After Preprocessing) | The Number of Total Frames | Avg. Frames in One Scene (Ranges) | |
|---|---|---|---|---|
| Car-Only Scenes | Interactive Scenes | |||
| A | 4221 | 136,189 | 32.26 frames (1.29 s) | |
| 2681 | 1540 | |||
| B | 2908 | 86,249 | 29.66 frames (1.18 s) | |
| 1721 | 1187 | |||
| C | 4111 | 382,980 | 93.16 frames (3.72 s) | |
| 2321 | 1790 | |||
| D | 6955 | 219,240 | 31.52 frames (1.05 s) | |
| 4633 | 2322 | |||
| E | 3876 | 125,935 | 32.49 frames (1.08 s) | |
| 2481 | 1395 | |||
| F | 7587 | 377,752 | 44.51 frames (1.48 s) | |
| 6494 | 1093 | |||
| G | 5612 | 175,247 | 31.22 frames (2.08 s) | |
| 3533 | 2079 | |||
| H | 2845 | 47,468 | 16.68 frames (1.11 s) | |
| 1843 | 1002 | |||
| I | 7775 | 260,260 | 33.47 frames (1.34 s) | |
| 4572 | 3203 | |||
| Target Object | Feature Name | Description | Example |
|---|---|---|---|
| Vehicle | Speed |
|
|
| Position |
|
| |
| Acceleration |
|
| |
| Crosswalk distance |
|
| |
| Car stops before crosswalk |
|
| |
| Pedestrian | Speed |
|
|
| Position |
|
| |
| Vehicle–pedestrian interaction | Distance |
|
|
| Relative position |
|
| |
| Pedestrian safety margin |
|
|
| Result of Trajectory without Kalman Filter (Car Threshold = 100, Pedestrian Threshold = 50) | |||||
|---|---|---|---|---|---|
| Spot Code | # of Scenes | The Number of Error Frames | |||
| Connectivity | Crossing | Directivity | Accuracy | ||
| Spot A | 4789 | 45 | 98 | 305 | 0.91 |
| Spot B | 3195 | 35 | 75 | 285 | 0.88 |
| Spot C | 5311 | 32 | 112 | 401 | 0.90 |
| Spot D | 7304 | 49 | 155 | 491 | 0.90 |
| Spot E | 4261 | 54 | 98 | 358 | 0.88 |
| Spot F | 8036 | 61 | 187 | 652 | 0.89 |
| Spot G | 6259 | 55 | 138 | 499 | 0.89 |
| Spot H | 3295 | 25 | 59 | 441 | 0.84 |
| Spot I | 7940 | 35 | 90 | 595 | 0.91 |
| Average | 291 | 1012 | 4027 | 0.89 | |
| Result of trajectory without Kalman filter (Car threshold = 100, pedestrian threshold = 50) | |||||
| Spot code | # of scenes | The number of error frames | |||
| Connectivity | Crossing | Directivity | Accuracy | ||
| Spot A | 4789 | 25 | 66 | 194 | 0.94 |
| Spot B | 3195 | 21 | 58 | 201 | 0.91 |
| Spot C | 5311 | 22 | 74 | 298 | 0.93 |
| Spot D | 7304 | 40 | 101 | 347 | 0.93 |
| Spot E | 4261 | 41 | 59 | 256 | 0.91 |
| Spot F | 8036 | 45 | 111 | 515 | 0.92 |
| Spot G | 6259 | 35 | 77 | 398 | 0.92 |
| Spot H | 3295 | 14 | 32 | 387 | 0.86 |
| Spot I | 7940 | 28 | 47 | 457 | 0.93 |
| Average | 271 | 635 | 3053 | 0.92 | |
| Spot Code | Tolerance (cm) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Target Object | ||||||||||||
| 10 | 20 | 35 | 50 | 60 | 70 | |||||||
| V | P | V | P | V | P | V | P | V | P | V | P | |
| A | 0.18 | 0.10 | 0.36 | 0.23 | 0.69 | 0.51 | 0.93 | 0.89 | 0.95 | 0.90 | 0.95 | 0.91 |
| B | 0.17 | 0.09 | 0.31 | 0.23 | 0.70 | 0.48 | 0.88 | 0.87 | 0.97 | 0.88 | 0.98 | 0.97 |
| C | 0.10 | 0.10 | 0.24 | 0.19 | 0.64 | 0.52 | 0.90 | 0.90 | 0.95 | 0.87 | 0.96 | 0.88 |
| D | 0.25 | 0.11 | 0.32 | 0.14 | 0.72 | 0.53 | 0.90 | 0.90 | 0.95 | 0.91 | 0.97 | 0.91 |
| E | 0.17 | 0.14 | 0.28 | 0.11 | 0.71 | 0.49 | 0.89 | 0.87 | 0.96 | 0.95 | 0.97 | 0.95 |
| F | 0.12 | 0.12 | 0.29 | 0.17 | 0.69 | 0.56 | 0.90 | 0.93 | 0.94 | 0.90 | 0.96 | 0.94 |
| G | 0.17 | 0.12 | 0.37 | 0.21 | 0.72 | 0.51 | 0.89 | 0.91 | 0.90 | 0.94 | 0.92 | 0.93 |
| H | 0.14 | 0.13 | 0.25 | 0.20 | 0.70 | 0.46 | 0.90 | 0.91 | 0.92 | 0.92 | 0.93 | 0.92 |
| I | 0.11 | 0.10 | 0.23 | 0.17 | 0.68 | 0.45 | 0.89 | 0.84 | 0.94 | 0.92 | 0.96 | 0.94 |
| Average | 0.16 | 0.11 | 0.30 | 0.18 | 0.69 | 0.50 | 0.90 | 0.89 | 0.94 | 0.91 | 0.95 | 0.93 |
| Spot Code | All Scenes | Types of Scenes | |||
|---|---|---|---|---|---|
| Max. (km/h) | Min. (km/h) | Mean (km/h) | Avg. of Car-Only Scene (km/h) | Avg. of Interactive Scene (km/h) | |
| A | 71.3 | 3.6 | 18.2 | 20.5 | 12.2 |
| B | 87.5 | 4.4 | 24.5 | 25.9 | 16.2 |
| C | 75.4 | 6.5 | 36.5 | 41.7 | 21.7 |
| D | 79.7 | 4.1 | 18.1 | 18.4 | 14.6 |
| E | 68.1 | 2.2 | 22.3 | 22.3 | 17.6 |
| F | 51.3 | 3.9 | 20.9 | 21.2 | 11.3 |
| G | 63.9 | 9.4 | 14.0 | 14.2 | 9.4 |
| H | 59.2 | 3.3 | 21.4 | 21.5 | 14.7 |
| I | 70.2 | 7.4 | 33.8 | 34. | 19.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noh, B.; Park, H.; Lee, S.; Nam, S.-H. Vision-Based Pedestrian’s Crossing Risky Behavior Extraction and Analysis for Intelligent Mobility Safety System. Sensors 2022, 22, 3451. https://doi.org/10.3390/s22093451
Noh B, Park H, Lee S, Nam S-H. Vision-Based Pedestrian’s Crossing Risky Behavior Extraction and Analysis for Intelligent Mobility Safety System. Sensors. 2022; 22(9):3451. https://doi.org/10.3390/s22093451
Chicago/Turabian StyleNoh, Byeongjoon, Hansaem Park, Sungju Lee, and Seung-Hee Nam. 2022. "Vision-Based Pedestrian’s Crossing Risky Behavior Extraction and Analysis for Intelligent Mobility Safety System" Sensors 22, no. 9: 3451. https://doi.org/10.3390/s22093451
APA StyleNoh, B., Park, H., Lee, S., & Nam, S.-H. (2022). Vision-Based Pedestrian’s Crossing Risky Behavior Extraction and Analysis for Intelligent Mobility Safety System. Sensors, 22(9), 3451. https://doi.org/10.3390/s22093451