
Compound Context-Aware Bayesian Inference Scheme for Smart IoT Environment




Abstract
:1. Introduction
- While various multi-sensor data fusion schemes with BI have been proposed, they are mostly based on a single context. We proposed a generic approach for improving reasoning and inference accuracy by sharing and utilizing multiple compound contexts.
- Since the events in the real situation might be correlated with each other, the inference operation is further specified in two modes to best match the given condition between the contexts of sensor data: (i) Bayesian inference with dependent contexts and (ii) Bayesian inference with independent contexts.
- A novel belief function of the BI system is developed which effectively represents the conditional dependency between a specific state and contextual information. The proposed modeling approach is general so that it can be adopted for any inference problem handling heterogeneous data.
2. Related Work
3. The Proposed Scheme
3.1. Design Goal
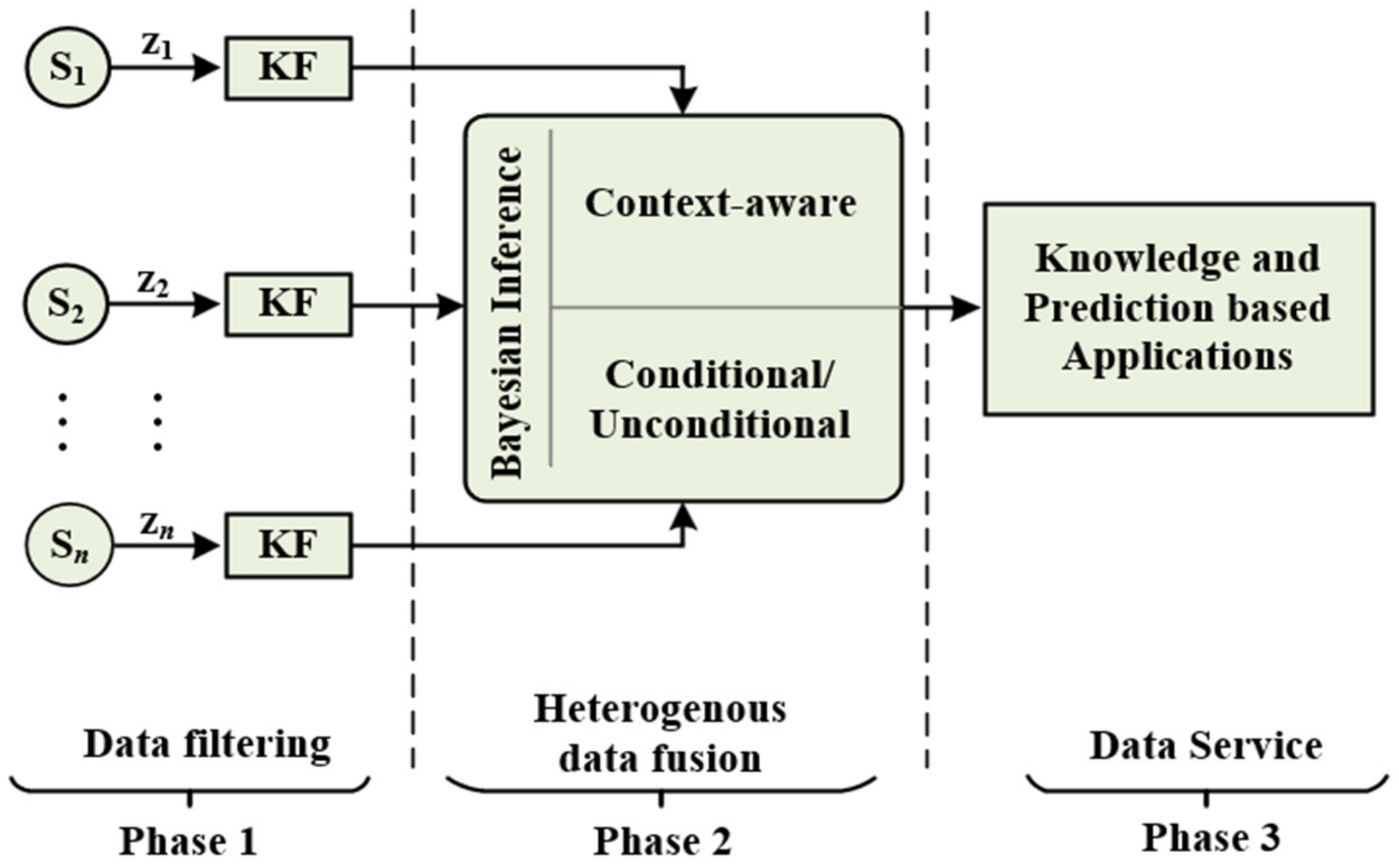
3.2. Operation
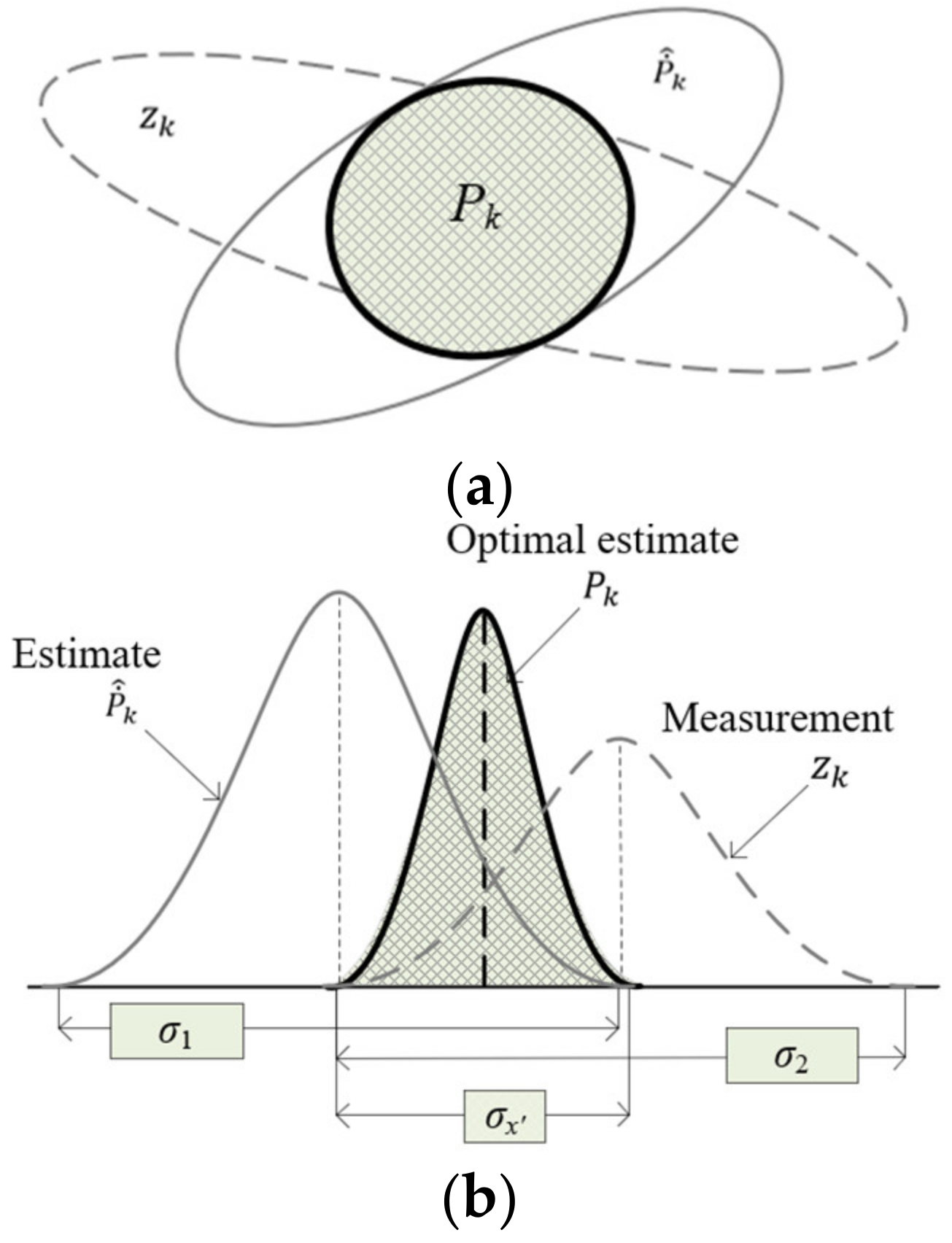
3.2.1. Distributed Filtering
3.2.2. Bayesian Inference
- Bayesian Inference with Dependent Contexts
- Bayesian Inference with Independent Contexts
4. Performance Evaluation
4.1. Simulation Environment
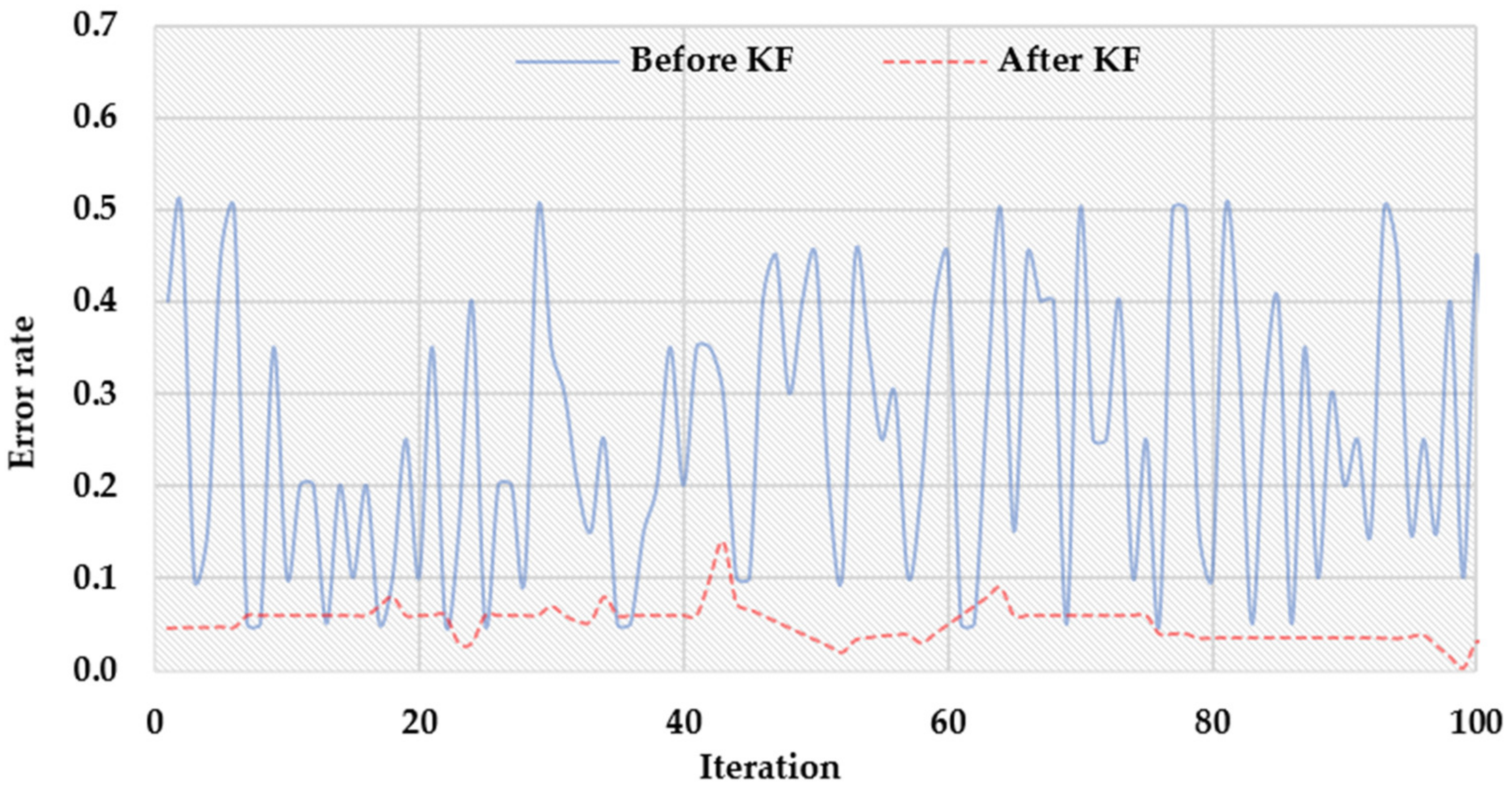
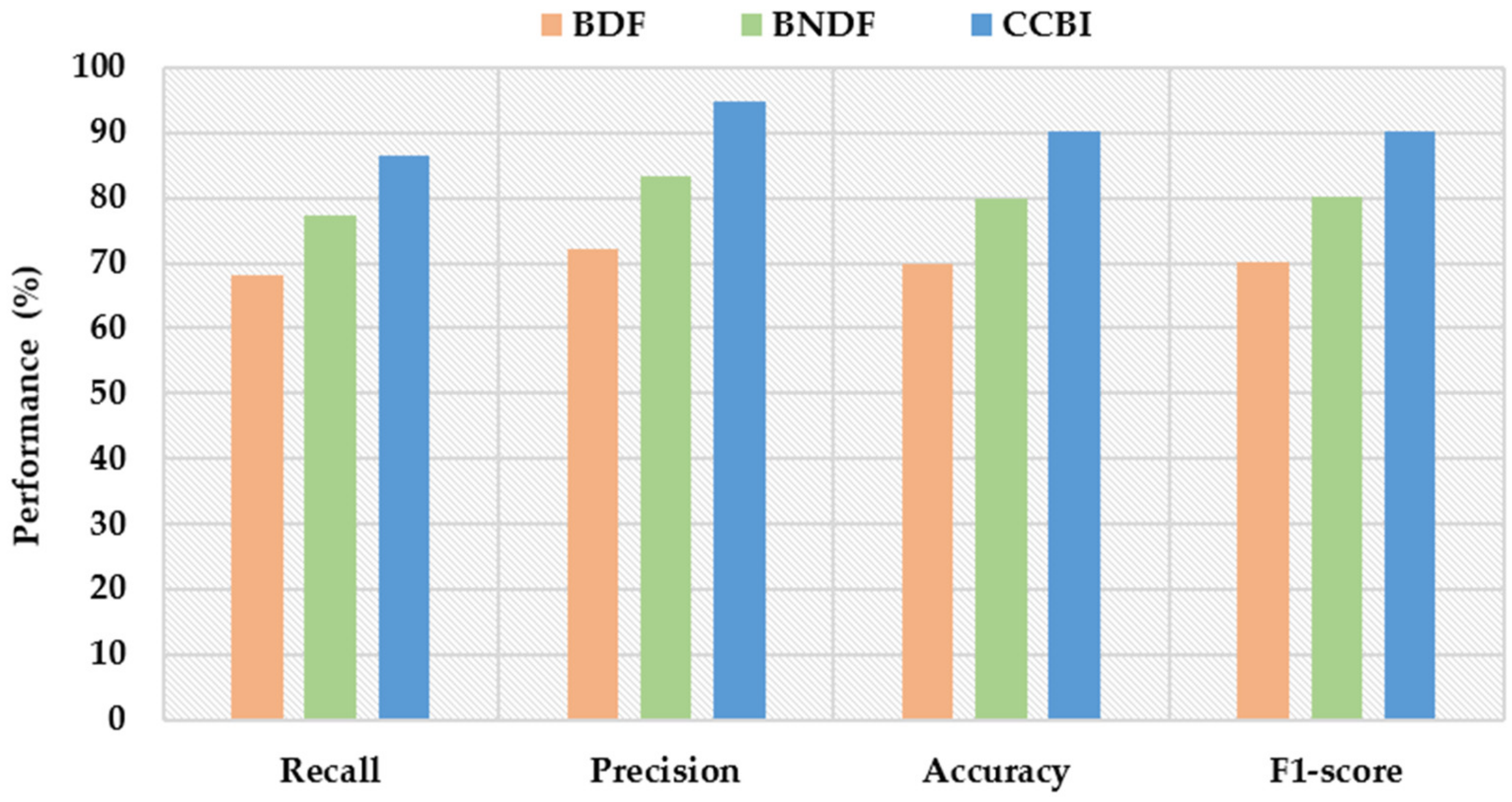
4.2. Simulation Result
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- O’Dwyer, E.; Pan, I.; Acha, S.; Shah, N. Smart energy systems for sustainable smart cities: Current developments, trends and future directions. Appl. Energy 2019, 237, 581–597. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Yang, C.; Jiang, L.; Xie, S.; Zhang, Y. Intelligent Edge Computing for IoT-Based Energy Management in Smart Cities. IEEE Netw. 2019, 33, 111–117. [Google Scholar] [CrossRef]
- Caragliu, A.; Del Bo, C.F. Smart innovative cities: The impact of Smart City policies on urban innovation. Technol. Forecast. Soc. Chang. 2018, 142, 373–383. [Google Scholar] [CrossRef]
- Khan, T.S.; Khan, N.U.; Juneio, H.F. Smart City Paradigm: Importance, Characteristics, and Implicatios. In Proceedings of the 2020 Advances in Science and Engineering Technology International Conferences (ASET), Dubai, United Arab Emirates, 4 February–9 April 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Humayun, M.; Alsaqer, M.S.; Jhanjhi, N. Energy Optimization for Smart Cities Using IoT. Appl. Artif. Intell. 2022, 1–17. [Google Scholar] [CrossRef]
- Mehta, S.; Bhushan, B.; Kumar, R. Machine Learning Approaches for Smart City Applications: Emergence, Challenges and Opportunities. In Recent Advances in Internet of Things and Machine Learning; Springer: Berlin/Heidelberg, Germany, 2022; pp. 147–163. [Google Scholar]
- Zanella, A.; Bui, N.; Castellani, A.; Vangelista, L.; Zorzi, M. Internet of Things for Smart Cities. IEEE Internet Things J. 2014, 1, 22–32. [Google Scholar] [CrossRef]
- Lombardi, M.; Pascale, F.; Santaniello, D. Internet of Things: A General Overview between Architectures, Protocols and Applications. Information 2021, 12, 87. [Google Scholar] [CrossRef]
- Priya Dharshini, K.; Gopalakrishnan, D.; Shankar, C.; Ramya, R. A Survey on IoT Applications in Smart Cities. In Immersive Technology in Smart Cities; Springer: Berlin/Heidelberg, Germany, 2022; pp. 179–204. [Google Scholar]
- Khaleghi, B.; Khamis, A.; Karray, F.O.; Razavi, S.N. Multisensor data fusion: A review of the state-of-the-art. Inf. Fusion 2013, 14, 28–44. [Google Scholar] [CrossRef]
- Shivashankarappa, N.; Adiga, S.; Avinash, R.A.; Janardhan, H.R. Kalman filter based multiple sensor data fusion in systems with time delayed state. In Proceedings of the 2016 3rd International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 11–12 February 2016; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2016; pp. 375–382. [Google Scholar]
- Perera, C.; Zaslavsky, A.B.; Christen, P.; Georgakopoulos, D. Context Aware Computing for The Internet of Things: A Survey. IEEE Commun. Surv. Tutor. 2013, 16, 414–454. [Google Scholar] [CrossRef] [Green Version]
- Clarizia, F.; Colace, F.; Lombardi, M.; Pascale, F.; Santaniello, D. A Multilevel Graph Approach for Road Accidents Data Interpretation. In Proceedings of the 10th International Symposium, CSS 2018, Amalfi, Italy, 29–31 October 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 303–316. [Google Scholar]
- Alam, F.; Mehmood, R.; Katib, I.; Albogami, N.N.; Albeshri, A. Data Fusion and IoT for Smart Ubiquitous Environments: A Survey. IEEE Access 2017, 5, 9533–9554. [Google Scholar] [CrossRef]
- Durrant-Whyte, H.; Henderson, T.C. Multisensor Data Fusion. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 867–896. [Google Scholar]
- Gravina, R.; Alinia, P.; Ghasemzadeh, H.; Fortino, G. Multi-sensor fusion in body sensor networks: State-of-the-art and research challenges. Inf. Fusion 2017, 35, 68–80. [Google Scholar] [CrossRef]
- De Paola, A.; Ferraro, P.; Gaglio, S.; Re, G.L.; Das, S. An Adaptive Bayesian System for Context-Aware Data Fusion in Smart Environments. IEEE Trans. Mob. Comput. 2016, 16, 1502–1515. [Google Scholar] [CrossRef]
- Ullah, I.; Youn, H.Y. Intelligent Data Fusion for Smart IoT Environment: A Survey. Wirel. Pers. Commun. 2020, 114, 409–430. [Google Scholar] [CrossRef]
- Ullah, I.; Youn, J.; Han, Y.-H. Multisensor Data Fusion Based on Modified Belief Entropy in Dempster–Shafer Theory for Smart Environment. IEEE Access 2021, 9, 37813–37822. [Google Scholar] [CrossRef]
- Lau, B.P.L.; Marakkalage, S.H.; Zhou, Y.; Hassan, N.U.; Yuen, C.; Zhang, M.; Tan, U.-X. A survey of data fusion in smart city applications. Inf. Fusion 2019, 52, 357–374. [Google Scholar] [CrossRef]
- El-Din, D.M.; Hassanien, A.E.; Hassanien, E.E. Information Integrity for Multi-sensors Data Fusion in Smart Mobility. In Toward Social Internet of Things (SIoT): Enabling Technologies, Architectures and Applications; Springer: Berlin/Heidelberg, Germany, 2019; pp. 99–121. [Google Scholar]
- Klein, L.A.; Klein, L.A. Sensor and Data Fusion: A Tool for Information Assessment and Decision Making; SPIE Press: Bellingham, WA, USA, 2004; Volume 324. [Google Scholar]
- Junghans, M.; Jentschel, H.-J. Qualification of traffic data by Bayesian network data fusion. In Proceedings of the 2007 10th International Conference on Information Fusion, Quebec, QC, Canada, 9–12 July 2007; pp. 1–7. [Google Scholar]
- Cicirelli, F.; Guerrieri, A.; Spezzano, G.; Vinci, A. An edge-based platform for dynamic Smart City applications. Future Gener. Comput. Syst. 2017, 76, 106–118. [Google Scholar] [CrossRef]
- Khan, S.; Nazir, S.; García-Magariño, I.; Hussain, A. Deep learning-based urban big data fusion in smart cities: Towards traffic monitoring and flow-preserving fusion. Comput. Electr. Eng. 2020, 89, 106906. [Google Scholar] [CrossRef]
- De Paola, A.; Gaglio, S.; Re, G.L.; Milazzo, F.; Ortolani, M. Adaptive Distributed Outlier Detection for WSNs. IEEE Trans. Cybern. 2014, 45, 902–913. [Google Scholar] [CrossRef]
- Zhou, T.; Chen, M.; Yang, C.; Nie, Z. Data fusion using Bayesian theory and reinforcement learning method. Sci. China Inf. Sci. 2020, 63, 1–3. [Google Scholar] [CrossRef]
- Zhang, L.; Xie, Y.; Xidao, L.; Zhang, X. Multi-source heterogeneous data fusion. In Proceedings of the 2018 International Conference on Artificial Intelligence and Big Data (ICAIBD), Chengdu, China, 26–28 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 47–51. [Google Scholar]
- Chen, X.; Li, X. Virtual temperature measurement for smart buildings via Bayesian model fusion. In Proceedings of the 2016 IEEE International Symposium on Circuits and Systems (ISCAS), Montreal, QC, Canada, 22–25 May 2016; IEEE: Piscataway, NJ, USA; pp. 950–953. [Google Scholar]
- Datcu, M.; Seidel, K. Bayesian Methods: Applications in Information Aggregation and Image Data Mining. Int. Arch. Photogramm. Remote Sens. 1999, 32, 68–73. [Google Scholar]
- Gao, J.-P.; Xu, C.-B.; Zhang, L.; Zheng, J.-L.; Shu, H.; Yuan, X. A Method of Information Fusion Based on Fuzzy Neural Network and Its Application. ITM Web Conf. 2017, 11, 1015. [Google Scholar] [CrossRef] [Green Version]
- Abdulhafiz, W.A.; Khamis, A. Bayesian approach to multisensor data fusion with Pre- and Post-Filtering. In Proceedings of the 2013 10th IEEE International Conference on Networking, Sensing and Control (ICNSC), Evry, France, 10–12 April 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 373–378. [Google Scholar]
- Ullah, I.; Youn, H.Y.; Han, Y.-H. Integration of Type-2 Fuzzy Logic and Dempster–Shafer Theory for Accurate Inference of IoT-Based Health-Care System. Future Gener. Comput. Syst. 2021, 124, 369–380. [Google Scholar] [CrossRef]
- Ullah, I.; Lim, H.-K.; Han, Y.-H. Feature Correlation-based Data Fusion using Dempster-Shafer Evidence Theory for WSN. In Proceedings of the 2021 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 20–22 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1208–1212. [Google Scholar]
- Kalman, R.E.; Bucy, R.S. New Results in Linear Filtering and Prediction Theory. J. Basic Eng. 1961, 83, 95–108. [Google Scholar] [CrossRef]
- Baloch, Z.; Shaikh, F.K.; Unar, M.A. A Context-Aware Data Fusion Approach for Health-IoT. Int. J. Inf. Technol. 2018, 10, 241–245. [Google Scholar] [CrossRef]
- Coroama, V.; Bohn, J.; Mattern, F. Living in a smart environment implications for the coming ubiquitous information society. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics (IEEE Cat. No.04CH37583), The Hague, The Netherlands, 10–13 October 2005; IEEE: Piscataway, NJ, USA, 2005; Volume 6, pp. 5633–5638. [Google Scholar]
- Raol, J.R. Multi-Sensor Data Fusion with MATLAB®; CRC Press: Boca Raton, FL, USA, 2009; ISBN 1-4398-0005-7. [Google Scholar]
- Challa, S.; Koks, D. Bayesian and Dempster-Shafer fusion. Sadhana 2004, 29, 145–174. [Google Scholar] [CrossRef]
- Add White Gaussian Noise to Signal—MATLAB Awgn. Available online: https://www.mathworks.com/help/comm/ref/awgn.html (accessed on 27 February 2022).
- Chicco, D.; Jurman, G. The advantages of the Matthews correlation coefficient (MCC) over F1 score and accuracy in binary classification evaluation. BMC Genom. 2020, 21, 1–13. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The state of the process | |
| The system state matrix | |
| The Input matrix | |
| The control vector | |
| The process noise or gain | |
| The measurement obtained by sensors | |
| The Observation (model) matrix | |
| Noise measurement or error | |
| The estimation of the predicted state | |
| Covariance of error | |
| Covariance | |
| The Kalman gain |
| Denotes the sensory measurement at state | |
| Represents the contextual information at state | |
| Denotes the environment at state | |
| Represents the target alarm value at state | |
| Denotes the probability function on the measurement | |
| Represents the belief of the occurrence |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ullah, I.; Kim, J.-B.; Han, Y.-H. Compound Context-Aware Bayesian Inference Scheme for Smart IoT Environment. Sensors 2022, 22, 3022. https://doi.org/10.3390/s22083022
Ullah I, Kim J-B, Han Y-H. Compound Context-Aware Bayesian Inference Scheme for Smart IoT Environment. Sensors. 2022; 22(8):3022. https://doi.org/10.3390/s22083022
Chicago/Turabian StyleUllah, Ihsan, Ju-Bong Kim, and Youn-Hee Han. 2022. "Compound Context-Aware Bayesian Inference Scheme for Smart IoT Environment" Sensors 22, no. 8: 3022. https://doi.org/10.3390/s22083022
APA StyleUllah, I., Kim, J.-B., & Han, Y.-H. (2022). Compound Context-Aware Bayesian Inference Scheme for Smart IoT Environment. Sensors, 22(8), 3022. https://doi.org/10.3390/s22083022