Operations in an urban environment will be a key capability of armed forces in the future. This environment holds very specific challenges due to different interconnected levels of movement (supersurface—surface—subsurface) and a significant portion of infrastructure hidden from view. The most challenging is the subsurface environment, where the simultaneous occurrence of armed opponents, toxic gas and smoke, water ingress, and other kinds of hazards pose a complex subsurface scenario [
1]. “Existing underground service facilities include road and rail tunnels, urban subways, underground parking, canalisation as well as energy recovery, transport and storage sites. But also structures out of sight as abandoned traffic systems, former air-raid shelters or nuclear waste deposits are part of the subterranean environment” [
2]. Therefore, millions of people around the world are relying upon the safe and secure operation of subsurface service structures, and any violent obstruction unsettles the public. During the past several years, several attacks affecting subsurface structures have taken place: New York (1993), Tokyo (1995), Moscow (2004), London (2005), Saint Petersburg (2017)—to name just a few. Events such as the attack in Tokyo, which claimed over 6200 injured, show how challenging an operation can be [
3]. The public transport system of a large city carries many passengers, the Vienna subway (Wiener Linien) for example about 500 million per year [
4]. To that end, an underground traffic hub becomes a gathering place for several thousand citizens during peak hours: thus a possible and very attractive target for attacks. Mission accomplishment within such complex scenarios can be optimised using military tactics, techniques, and procedures within a truly comprehensive approach integrating all relevant actors. To develop all the necessary capabilities, the NIKE (
www.milak.at/nike, accessed on 12 January 2022) research and development program was initiated, joining experts from various fields. While NIKE BLUETRACK was developed mainly for military use cases in subsurface structures, it is of course also of high relevance for all kinds of emergencies within confined spaces.
One essential prerequisite for successful mission accomplishment is the reliable localisation of one’s own forces. Underground navigation, such as in subways, road and rail tunnels, or sewage canals [
2], is considerably more challenging since Global Navigation Satellite Systems (GNSSs) cannot be used for positioning. The layout of a contorted subsurface structure is demonstrated in
Figure 1. Together with poor lighting and smoke (e.g., due to explosions), it shows the necessity of avoiding blue-on-blue situations or, in other words, the prevention of friendly fire. In specialist jargon, the colour blue is assigned to describe friendly forces, whereas the colour red is used for opposing forces. Hence, a blue force tracking system, which provides real-time visualisation of one’s own forces’ positions on a map to the command post, would offer the possibility of a fast and correct representation of the mission within environments hidden from view. The decision-making process would be easier, thereby increasing the safety of the personnel operating.
The primary system requirements for NIKE BLUETRACK had to be determined as follows:
1.1. Related Work
In general, a positioning system for emergency/military personnel should be small, lightweight, and inexpensive, while providing metre-level accuracy [
5]. Another challenge is that pre-installed infrastructures (e.g., WiFi networks) and additional information (e.g., map information or fingerprinting databases), are usually non-existent in the targeted application. Since GNSSs’ signals are not available underground, other positioning sensors must be considered. Accordingly, vision sensors, such as cameras, inertial sensors, or short-range communication technologies [
6] (e.g., Bluetooth, WiFi, or ultra-wideband (UWB)), are reasonable instruments for GNSS-denied environments. Vision-based positioning relies on cameras and prior map information [
7]. Therefore, they are not appropriate in an environment where the field of vision may be reduced by smoke.
With the introduction of micro-electro-mechanical system (MEMS) technologies, foot-mounted inertial navigation has become an attractive research field. A major challenge in such an INS is to mitigate the accumulation of navigation errors resulting in a drift [
8]. One way to estimate and correct the drift is regular zero-velocity updates (ZUPTs) [
9]. ZUPTs in a foot-mounted INS are applied during stance phases. However, the detection of such zero-velocity events has a great impact on the INS’s accuracy. Classical zero-velocity detectors, which are based on fixed-threshold approaches [
10], perform well on homogeneous motions. However, uniform motions do not apply to standard application cases, especially not in military operations. Wagstaff et al. [
11] proposed two robust zero-velocity detectors, which are based on ML methodologies, namely: a support vector machine-based motion-adaptive detector and an LSTM-based zero-velocity classifier. They showed that both approaches outperform classical zero-velocity detectors. Another way to reduce the drift of an INS is the usage of two IMUs. By introducing a spatial constraint based on the step length between the two systems, the heading drift is bounded [
12,
13,
14]. The precondition for an improvement of the system is that both INSs show a similar, symmetrical position error [
15]. As the authors of [
5] emphasise, a foot-mounted INS is a suitable centrepiece of a soldier and first-responder positioning system. However, it has to be aided with other positioning technologies to meet the requirements for reliable and continuous positioning on a large scale. The performance achievements of fusing a foot-mounted INS with short-range-based communication technologies [
16,
17] or map information [
18] is widespread in the literature. Woodman [
19] investigates approaches to improve a foot-mounted INS by introducing environmental constraints and WiFi-assisted localisation.
Short-/medium-range communication technologies [
6] are often associated with trilateration algorithms. However, Bluetooth is only applicable for small areas, whereas WiFi signals can cover huge areas, and is easy to deploy. WiFi localisation algorithms are very sensitive to environmental changes and, therefore, not rugged enough. In contrast, UWB offers a low power consumption, a higher accuracy (cm-level), and less sensitivity to interferences due to the broader bandwidth [
6]. UWB systems are suited for wearable applications, making them a promising technology. Moreover, UWB can be effectively used as a tool for cooperative positioning, as stated in [
5]. Cooperative positioning methods are extremely important instruments in indoor navigation applications, where an existing infrastructure (e.g., pre-placed UWB tags at known positions) cannot be presumed, as in the case of our application. Even if an infrastructure is available, there will be no guarantee that it will be intact. Therefore, a UWB anchor infrastructure has to be deployed during the mission: making it a portable infrastructure. This deployment includes the installation of the anchors in the underground structure during the mission and the subsequent estimation of their positions, possibly using observations from all operators collaboratively. Besides cooperative localisation, this process is often referred to as self-calibration in the literature [
20]. Calibration, in this context, means to determine the positions of the anchors. Self-calibration methods are often based on distance measurements between anchors (anchors act temporarily as tags to conduct measurements from neighbouring anchors). They are used to estimate the relative anchor positions within the network. Some methods are based on a variety of assumptions and exhibit a variety of constraints. As an example, the method presented by [
21] requires explicit assumptions about the relative locations of the anchors. The method implemented in the Qorvo DWM1001 module [
22] requires a certain geometrical shape (rectangle) and a priori information on the arrangement of the anchors of the network. Other methods apply multilateration to triangular sub-networks, decreasing the need for assumptions about the network geometry. A notable example of such a method is presented by [
23], using a triangle reconstruction algorithm and channel impulse response for positioning. In military situations and lengthy underground buildings such as tunnels, it is unlikely to have a network geometry that allows an accurate self-calibration based on the aforementioned methods. That gives rise to a different family of methods, which use a moving tag to estimate (to map) anchor coordinates in an exploratory manner, also known as simultaneous localisation and mapping (SLAM) [
24]. The authors of [
25] presented such a method using an agent that is equipped with a UWB tag and an IMU to obtain a joint estimate of anchor and tag coordinates from the tag observations of the anchor distances. Similar methods were developed for an ultrasonic positioning system with an odometer by [
26] and for a system based on IEEE 802.15.4a and an IMU by [
24]. An advantage of this family of self-calibration methods is that there are hardly any constraints with respect to the geometry of the anchor network. Therefore, it lends itself well to an application within our system and was adopted.
The combination of foot-mounted IMUs and UWB modules seems particularly suitable for a robust indoor positioning system, as shown in several studies [
16,
27,
28,
29]. A common approach represents a cascaded estimation architecture where IMU data are processed in an ESKF and then integrated into an upper Bayesian filtering framework, e.g., a PF [
18]. The usage of a PF enables the easy integration of non-linear information, but shows a higher complexity in contrast to an extended Kalman filter (EKF). Han et al. [
29], e.g., utilises a customised PF and ESKF for fusing UWB and IMU data to localise soldiers and unmanned vehicles under a collaborative network. The authors of [
30] introduce a cooperative positioning algorithm for emergency responders, which fuses inertial data in form of stepwise dead reckoning, WiFi, and UWB in a PF. They also take the absence of an existing infrastructure into consideration and achieve an accuracy of
m in a real-world experiment. Apart from pedestrians, robots in complicated underground or indoor environments are a noteworthy research field [
31,
32,
33].
1.2. Solution
However, no blue force tracking system is existent that provides a reliable positioning solution for complex scenarios in underground structures. A near-real-time visualisation of positions at the command post has to be guaranteed. Such a system should deal with the absence of local infrastructure since it cannot be assumed that the required infrastructure is available. This paper intends to provide the conception and development of an easily portable navigation solution for precise localisation, which can deal with harsh underground environment (smoke, poor lighting). The operators are equipped with two low-cost IMUs (each on one foot), one UWB tag, and several UWB anchors for deployment. The IMU data are translated into position changes using a dual foot-mounted INS in the form of an ESKF. Zero-velocity events (steps) are detected through ML methodologies: a new GRU-based zero-velocity detector was developed, which can handle different gaits at different speeds. Stepwise position changes are then fed into a PF where the distance measurements from the UWB anchors, and information from tunnel models is taken into account. In case of an emergency scenario, the availability of a 3D model of the subsurface structures cannot be assumed to be available. Therefore, a 3D tunnel model of the environment has to be generated during the mission, using specialised software. That allows the transformation of various heterogeneous data sources into a unified format for the tracking solution. Previous studies have shown that virtual reality (VR) visualisations can drastically improve the intuitive understanding of complex spatial situations in a military environment [
1,
34]. Hence, a visualisation of the results is created inside a virtual reality (VR) environment to give an intuitive overview of the situation to staff officers and commanders.
Figure 2 gives an impression of the use of VR for the preparation of military operations.
Field tests were conducted at the special research facility ZaB (
https://www.zab.at/, accessed on 31 January 2022) in Austria (
Figure 1). The ZaB is focused on underground constructions and operations and provides, among others, road and rail tunnels. During those test measurements, the tunnel model was assumed to be available and the needed infrastructure in part. However, the concept for the generation of the tunnel model and the setup of the infrastructure on-the-fly are presented. The visualisation tool is also treated.
The main contributions of this paper are:
A positioning filter approach is proposed for fusing measurements from two foot-mounted IMUs with UWB and a tunnel model. The IMU data are preprocessed in an ESKF to reduce the computational complexity and are further combined with distance measurements and a tunnel model in a PF. In contrast to other positioning systems where the localisation is based on local coordinates, the position estimation takes place in a global frame since the virtual environment operates in WGS84;
Additionally, a novel NN-based zero-velocity detector for inertial pedestrian navigation is presented;
A method for setting up the infrastructure required for UWB positioning during the mission is described. Measurements from multiple operators are combined to estimate the coordinates of newly installed anchors in a centralised particle filter with kernel smoothing;
A rapid mapping tool, the Fast Tunnel Modelling Tool (FTMT), and a visualisation tool used for monitoring the tracked operators in a virtual reality (VR) environment, the SOMT, are presented;
The results of practical experiments are presented, which were performed in an approximately 160 m-long street tunnel. A properly setup UWB network of at least four anchors, as well as a tunnel model were assumed to be present. The construction of the network on-the-fly was simulated.
This paper consists of three sections:
Section 2 describes the materials and methods and is divided into
Section 2.1, giving the sensor specifications, and
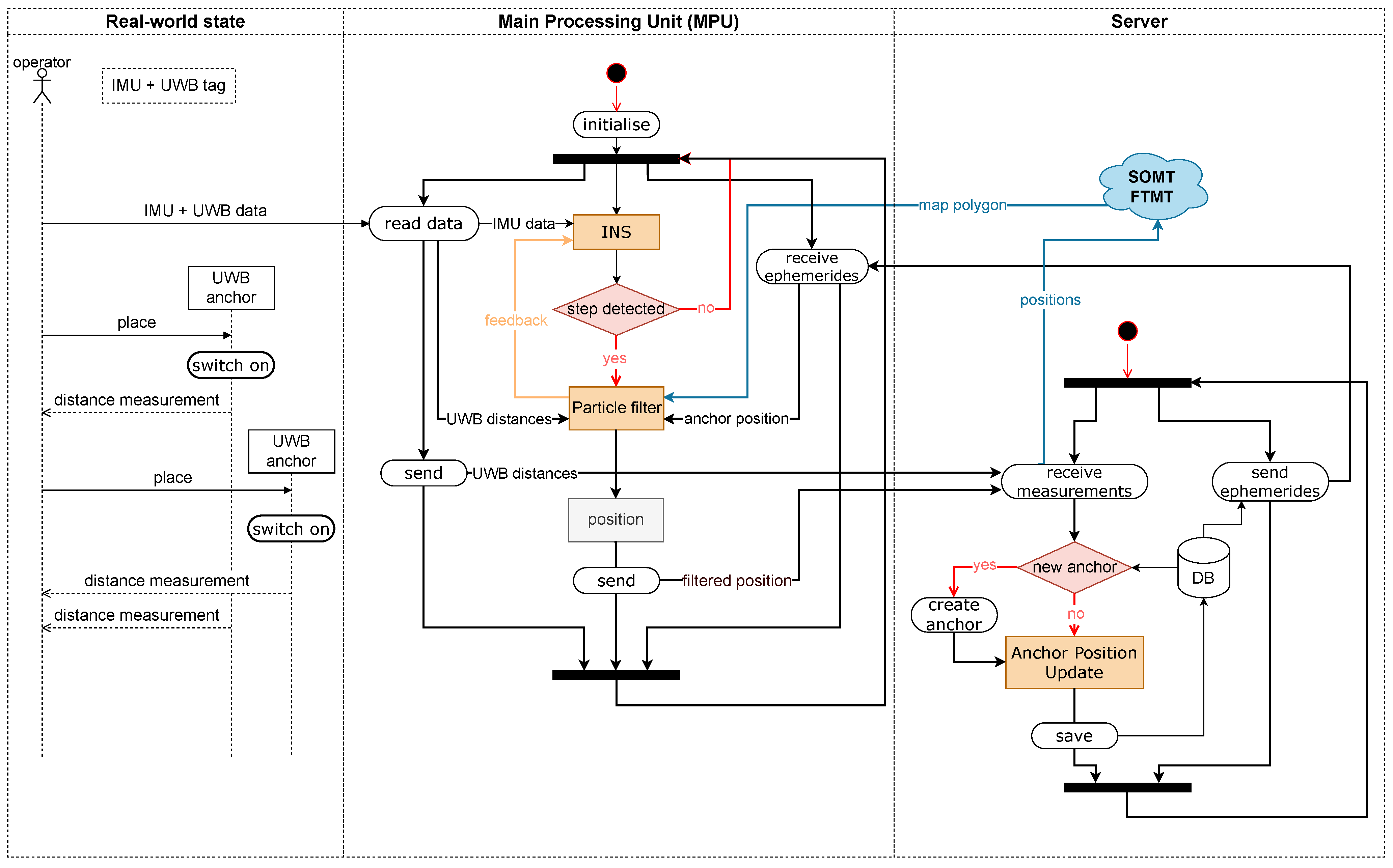
Section 2.2, showing the system architecture of the whole navigation system. The following subsections describe the system components, such as the generation of the tunnel model during the mission, the positioning algorithms, the dynamic setup of the UWB anchors, and the used visualisation tool. The last subsection of this part gives an insight into the data collection.
Section 3 presents the results including the performance metrics of the NN-based zero-velocity classifier, the achieved positioning accuracy in different scenarios, and the performance of the anchor position estimation. The final
Section 4 completes the paper with a discussion of the results.


 ,
, 
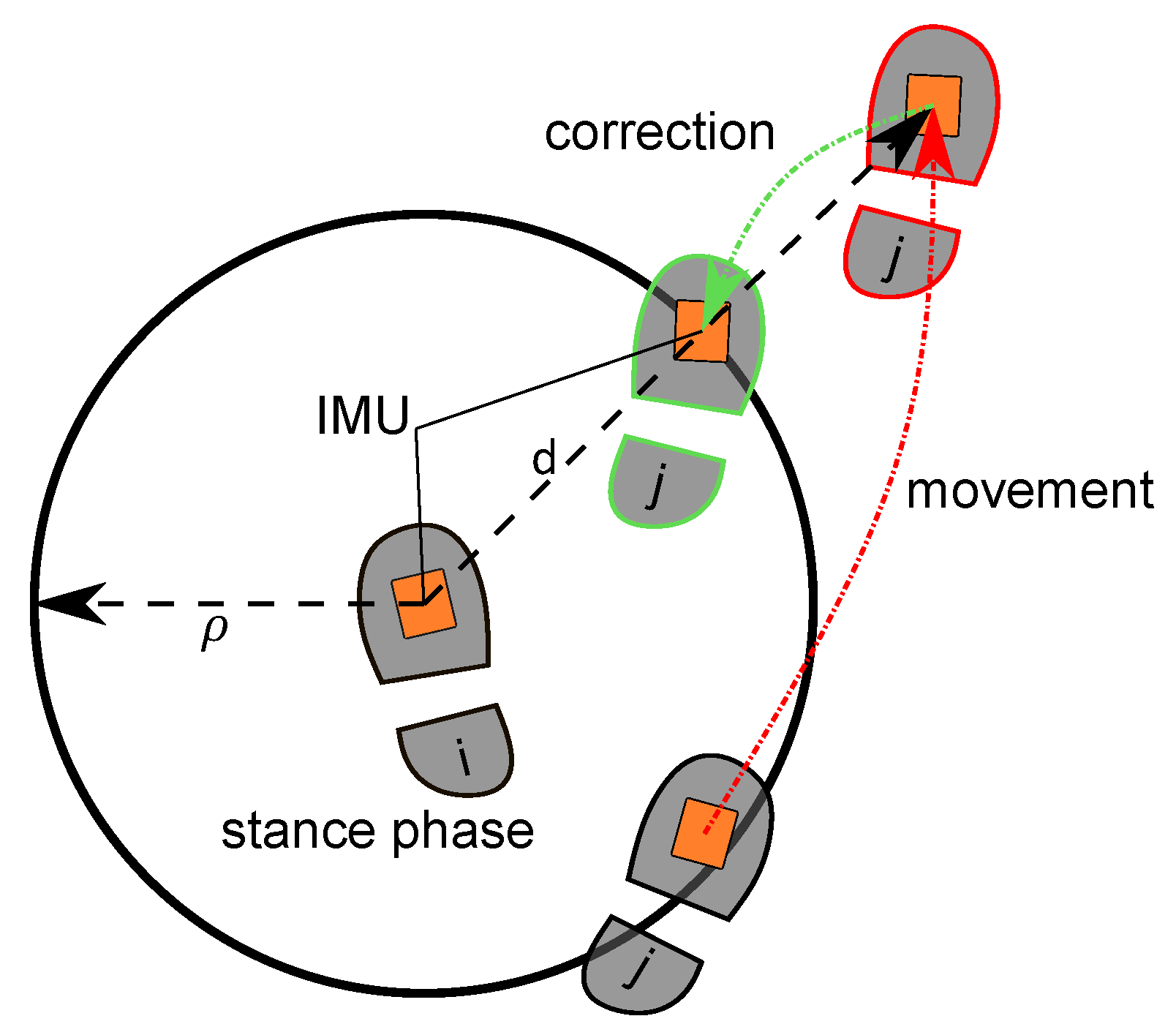
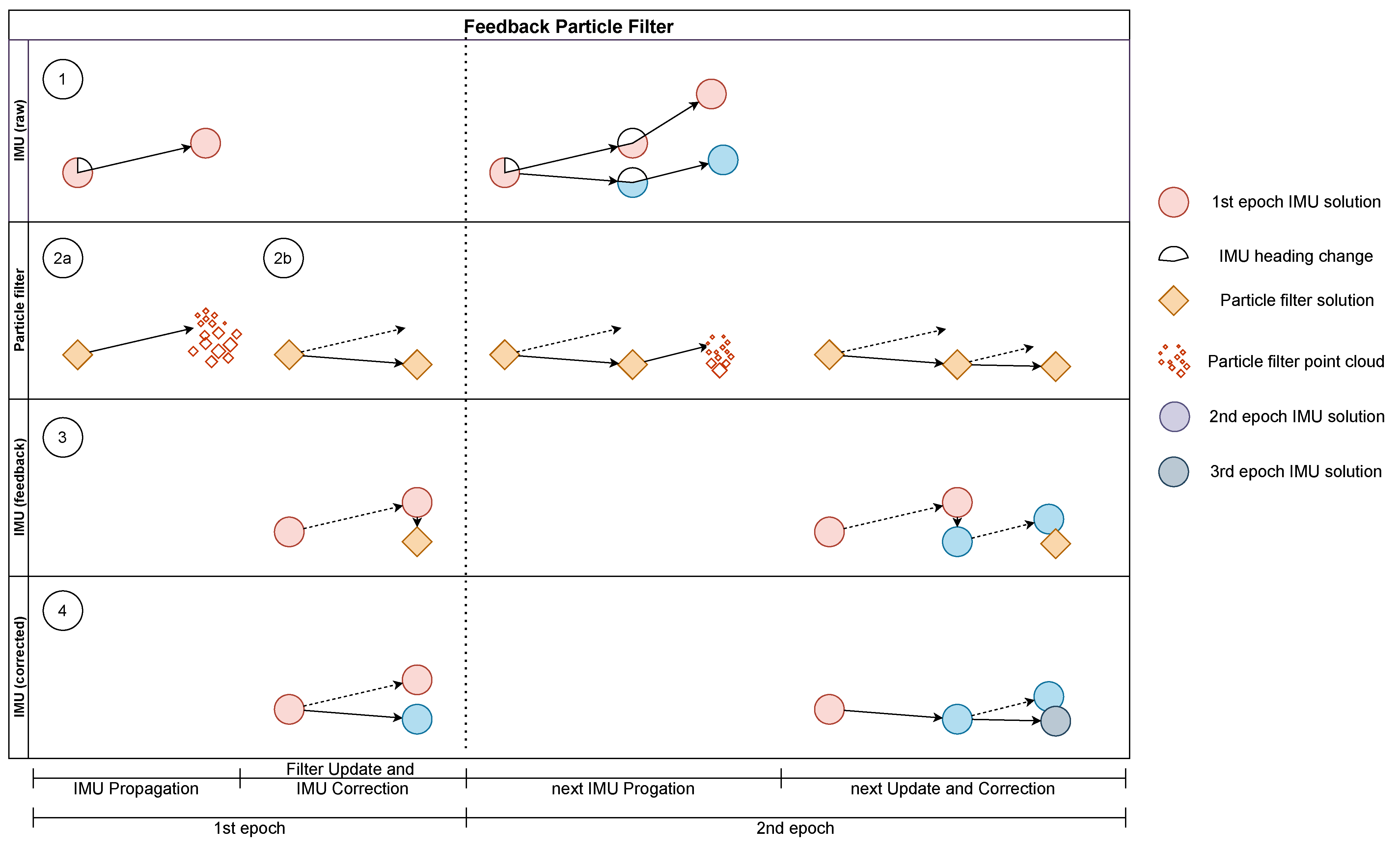
 to propagate the particles. Due to randomness, they become scattered in the process. Since particles in the probable direction of motion are assigned a larger weight, the filtered position in
to propagate the particles. Due to randomness, they become scattered in the process. Since particles in the probable direction of motion are assigned a larger weight, the filtered position in  lies right of the IMU solution. The filtered PF solution is sent back to the INS and used to calculate the error of the raw IMU solution in ③. Finally, the IMU is corrected within the ESKF in ④. The relationship between the coordinate difference and the attitude is defined in the dynamic model of the Kalman filter. The corrected state is used in the next epoch shown in the second column. While the uncorrected solution would drift even further to the left, the corrected propagation stays closer on a straight line. The PF once again favours particles at the bottom. The filtered position is used to further correct the IMU solution.
lies right of the IMU solution. The filtered PF solution is sent back to the INS and used to calculate the error of the raw IMU solution in ③. Finally, the IMU is corrected within the ESKF in ④. The relationship between the coordinate difference and the attitude is defined in the dynamic model of the Kalman filter. The corrected state is used in the next epoch shown in the second column. While the uncorrected solution would drift even further to the left, the corrected propagation stays closer on a straight line. The PF once again favours particles at the bottom. The filtered position is used to further correct the IMU solution.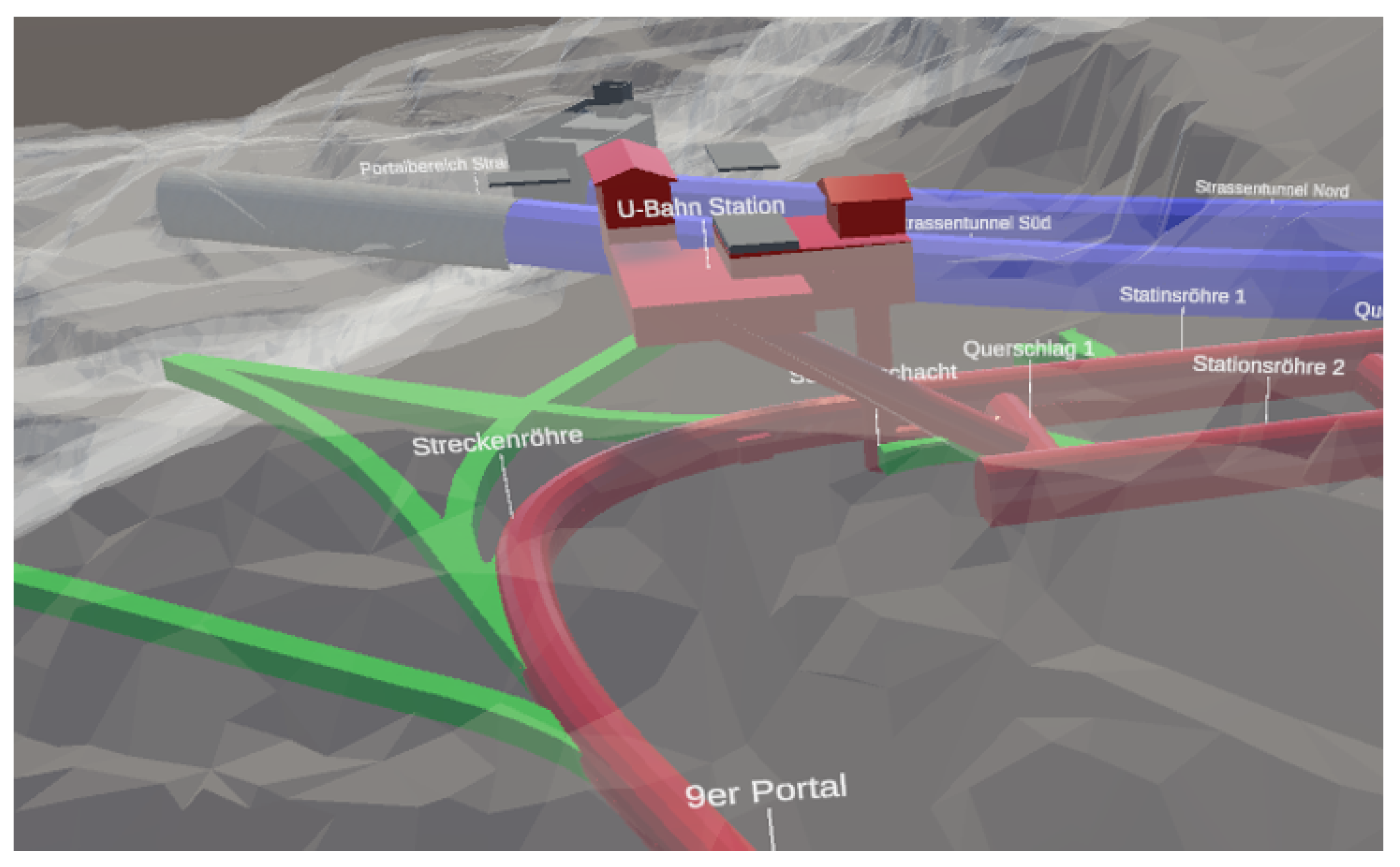






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}