
An Adaptive Topology Management Scheme to Maintain Network Connectivity in Wireless Sensor Networks

 ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
:
1. Introduction
2. Literature Review
- For decision-making, distributed data processing should be used.
- Long-term coverage and connectivity in the occurrence of faults to make the network more fault-tolerant.
- Algorithms must perform well at the lowest node degree possible.
- Bidirectional lines should be constructed for reliable connectivity.
- The scheme would be small (energy efficient) and easy to design and implement.
- To sustain connectivity, the link recovery process should be rapid.
3. Proposed Scheme
3.1. Tolerating Faults and Maintaining Network Connectivity Consuming Array Antenna (ToMaCAA)
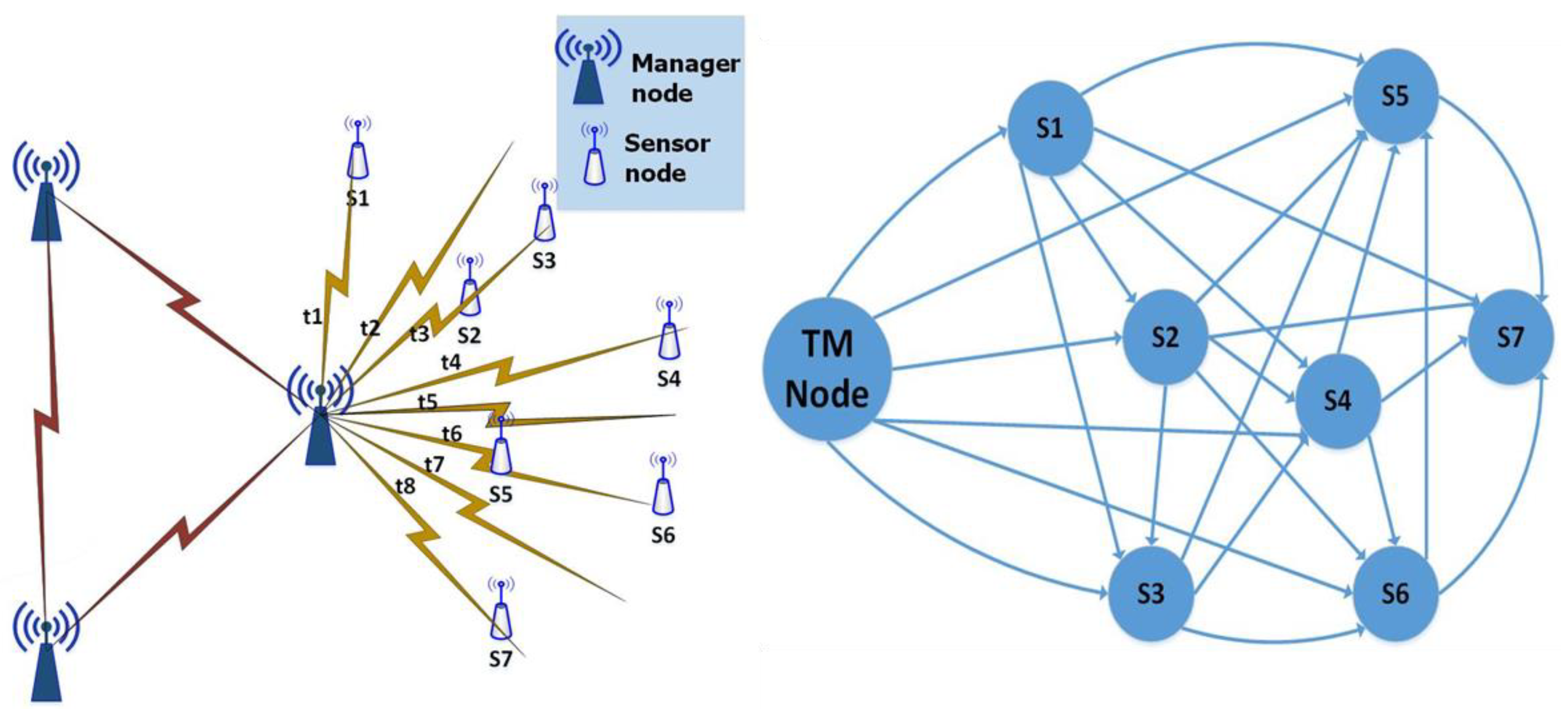
3.1.1. ToMaCAA: System Design and Operations Overview
- ○
- A group of static and homogeneous common sensor nodes with varying levels of transmission power are placed.
- ○
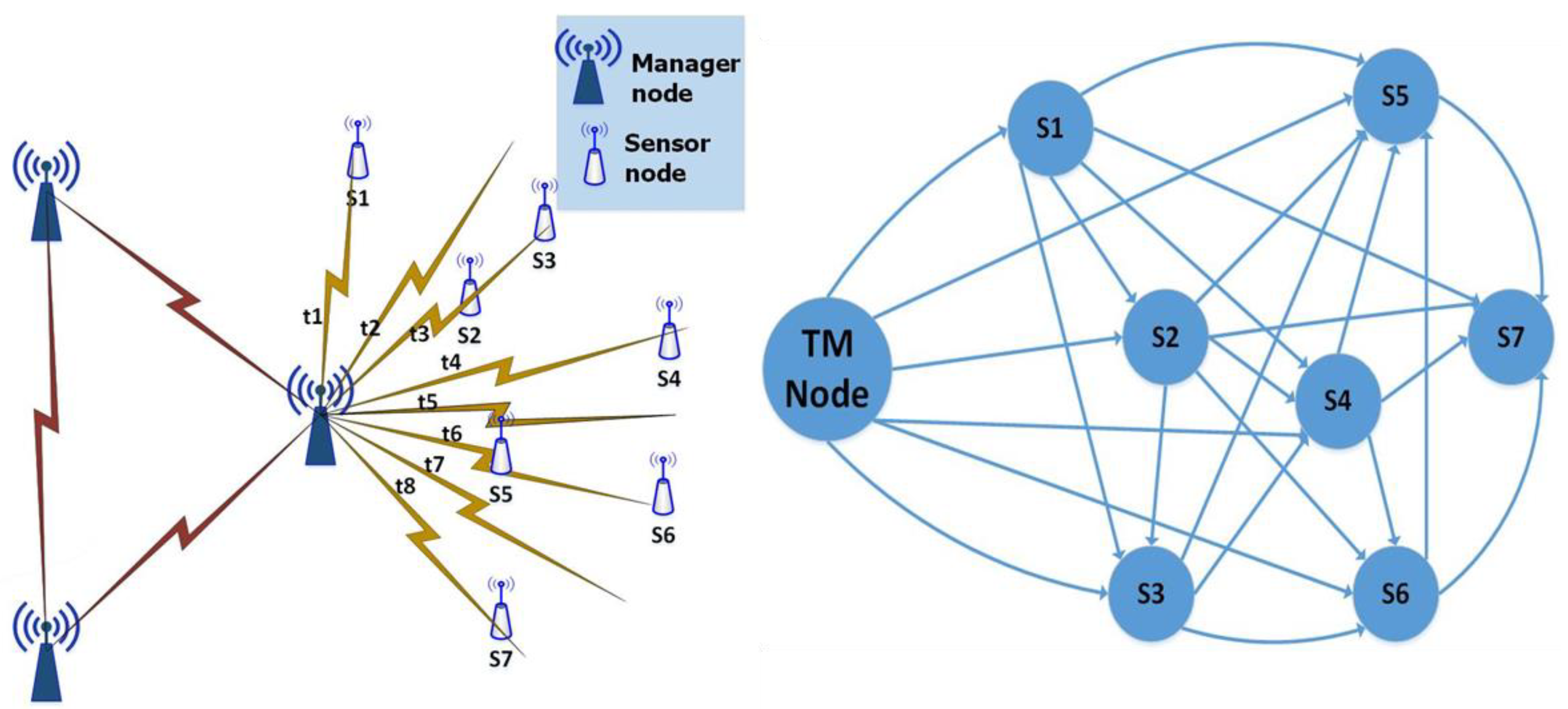
- Topology manager nodes with a high transmission range and abundant resources are deployed in a definite number (i.e., 5% of the deployed nodes);
- ○
- All nodes in the network are approachable from the source node (CS/TM) via their particular power level (connectivity range) and phase angle (direction).
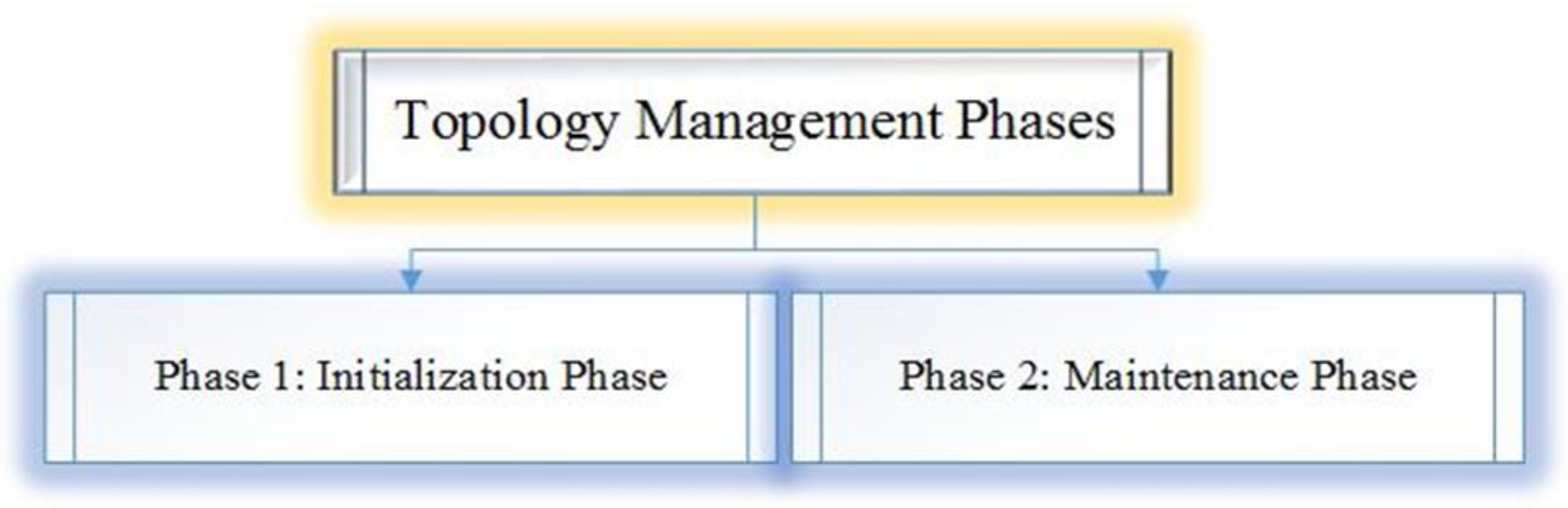
3.1.2. ToMaCAA: Phase-Wise Network Operations
3.1.3. Initialization Phase
- In the first step, the network start-up and configuration message “conf m” is broadcast to nearby Topology Manager (TM) nodes in the first stage;
- In the second step, every node records the RSSI (Received Signal Strength Indicator) [19] values associated with each phase of the received signal and broadcasts “Info_m” to fill in their neighbour list after receiving the message;
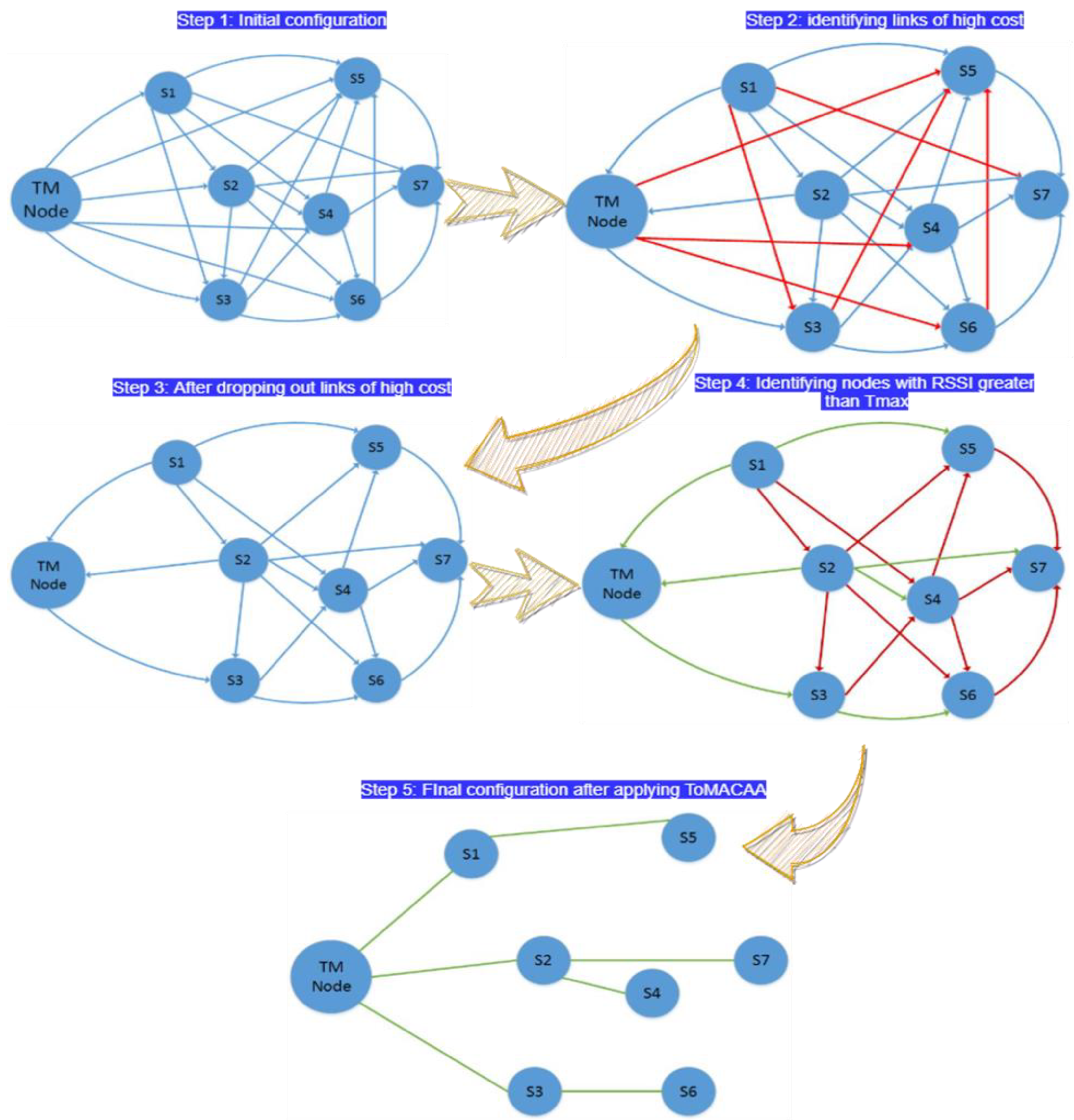
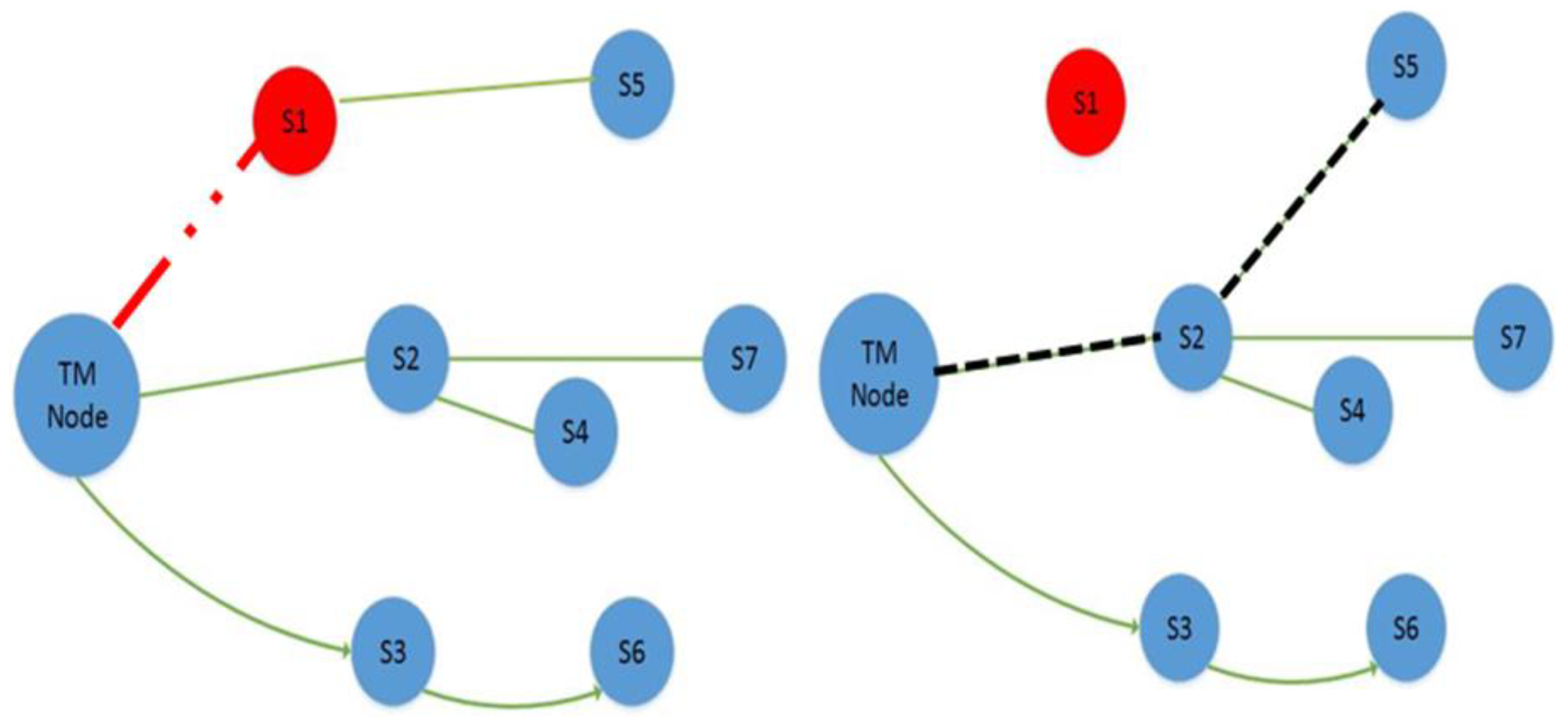
- The third step involves every node, creating a list of neighbour nodes with items arranged from minimum to maximum (low-cost path to high-cost path) and their particular signal phase (ϕ), as indicated in Table 2. Figure 6 shows how to send and receive data from the node closest to you in a given direction.
- In the fourth step, links with RRSI values less than or equal to the defined threshold values Tmin and Tmax will be discarded by the receiver nodes only if they have at least two neighbours in their list, as illustrated in Figure 6. The red links are disconnected links during the initialization phase to save communication costs, and they have no influence on the neighbour list;
- Likewise, in the fifth step, the sensor distance node’s distance from the TM node was estimated (based on the RSSI value and a total number of hops). For example, in Figure 6, node No. 7 eliminates all links with neighbour nodes and maintains only one link with node No. 2, as this link is between Tmin and Tmax and has the fewest chances of reaching the TM node, as shown in Figure 6;
- Finally, in step six, every node updates its transmission strength and direction in accordance with the node at the top of the list, and the information tables are updated accordingly. The final controlled neighbour list is shown in Table 3, and the final topology with connected links is shown in Figure 6.
3.1.4. Maintenance Phase
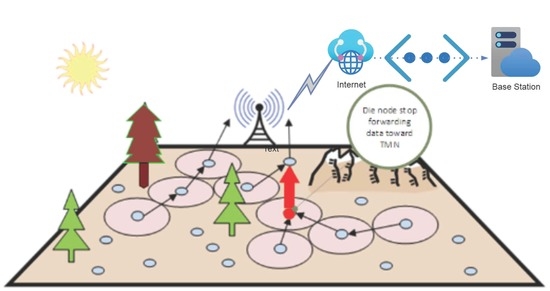
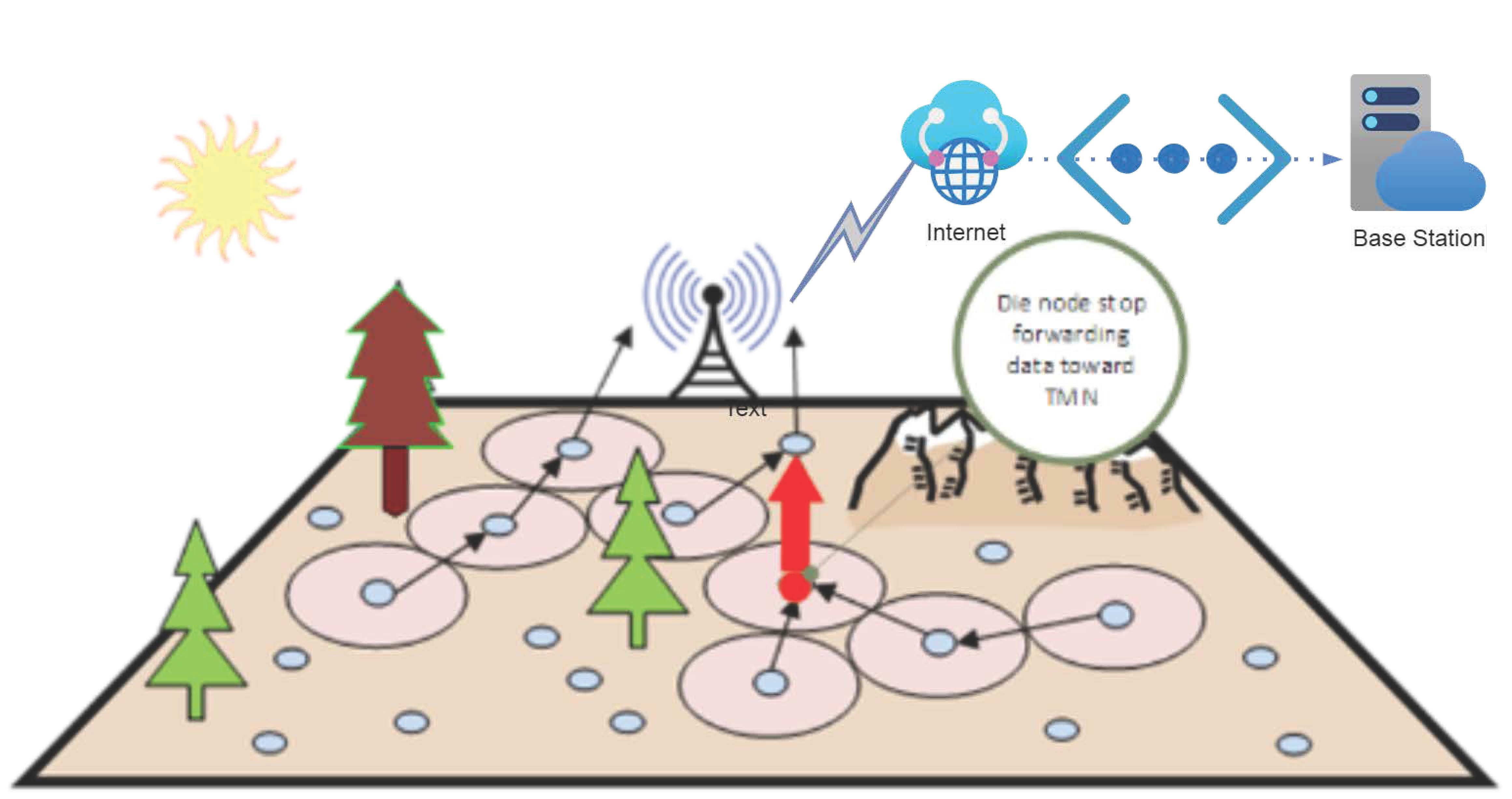
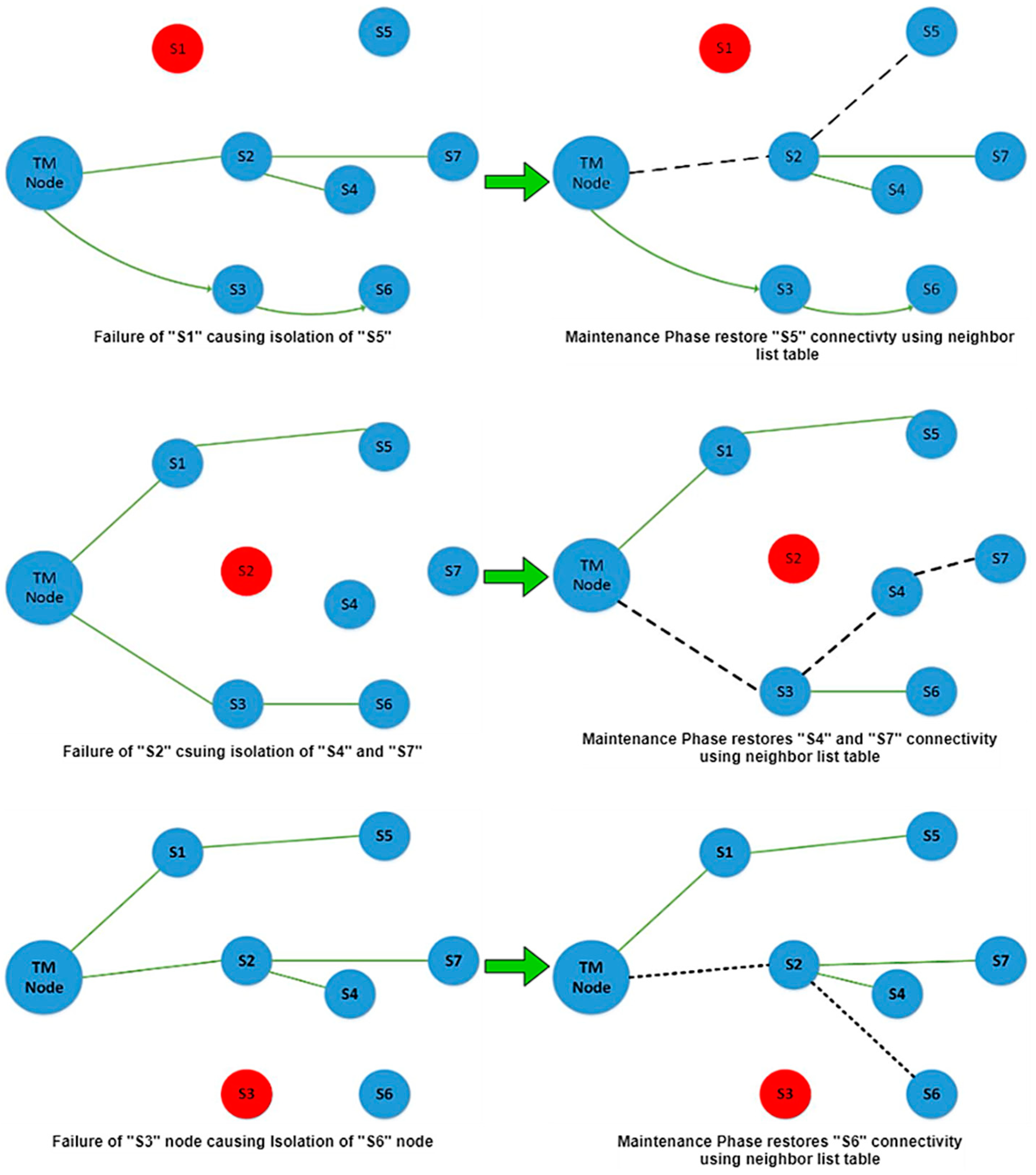
- When a TM identifies lonely nodes and network connectivity disruptions, it starts the maintenance phase by broadcasting a re-formation message (Conf ID) to the WSN. The ID of these nodes from which data are not expected will be included in this message.
- If the ID of the node receiving the re-configuration message matches the Conf ID, the node whose connection was cracked will re-configure itself, and a new path will be found and organized with the TM. The list of neighbours, as given in Table 2, will be used for this purpose. The procedure of connection re-configuration is depicted in Figure 7. The red isolating node is the one for which the maintenance process starts, and the cracked link is depicted in Figure 7 as a red dotted line;
- The topology constructed after the isolated node’s link was reconfigured now has a confirmed communication path to the TM node, so the data transmission procedure continues. Figure 7 shows the newly created path as a dotted black line. With the help of an example, the above-described maintenance process for various nodes has been adopted for these installed nodes in the network.
4. Simulation Results and Analysis
4.1. Simulation Parameters and Radio Energy Model
4.2. Performance Matrices and Analysis of Simulation Results
- Network lifetime.
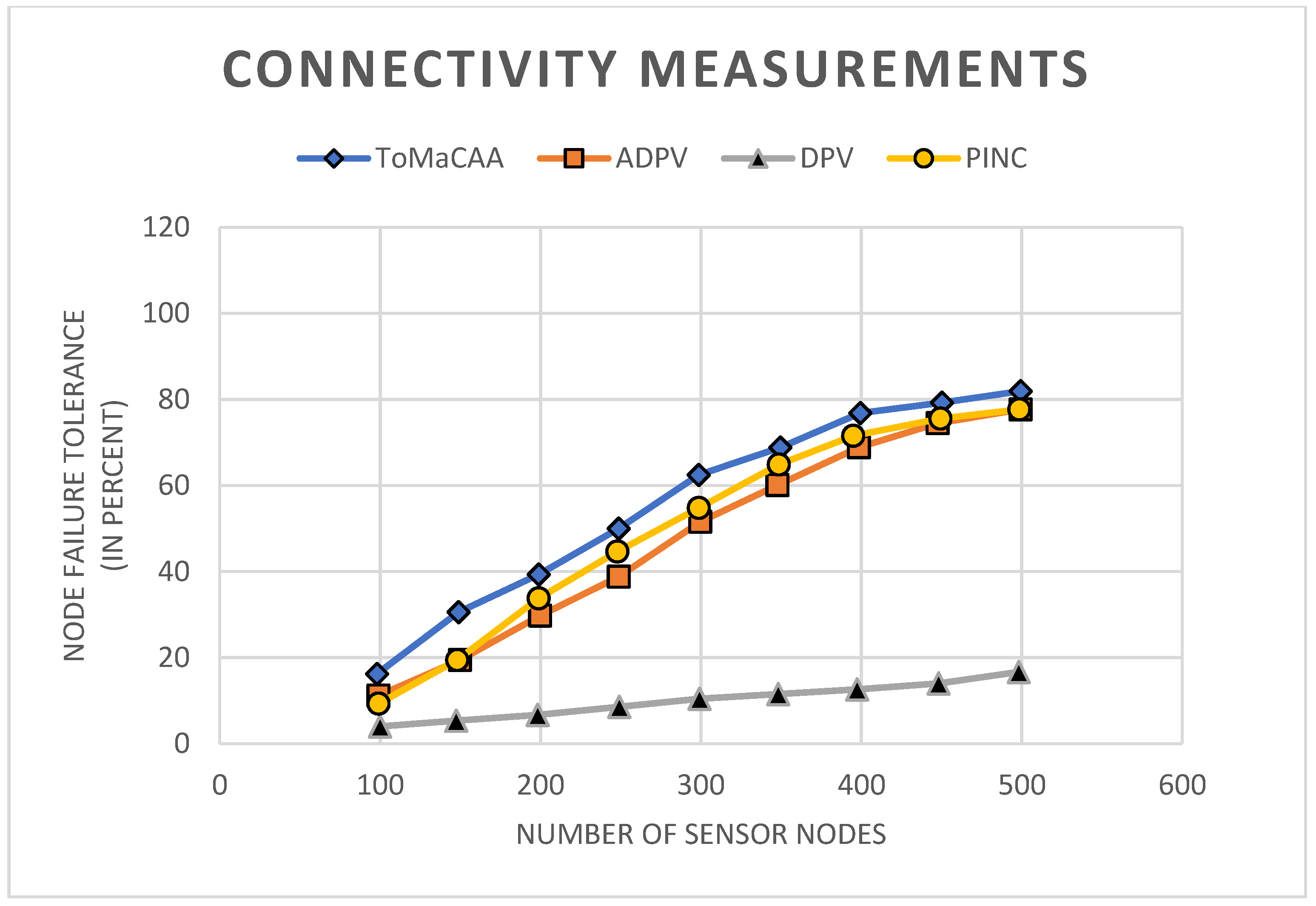
- Tolerance of node failure.
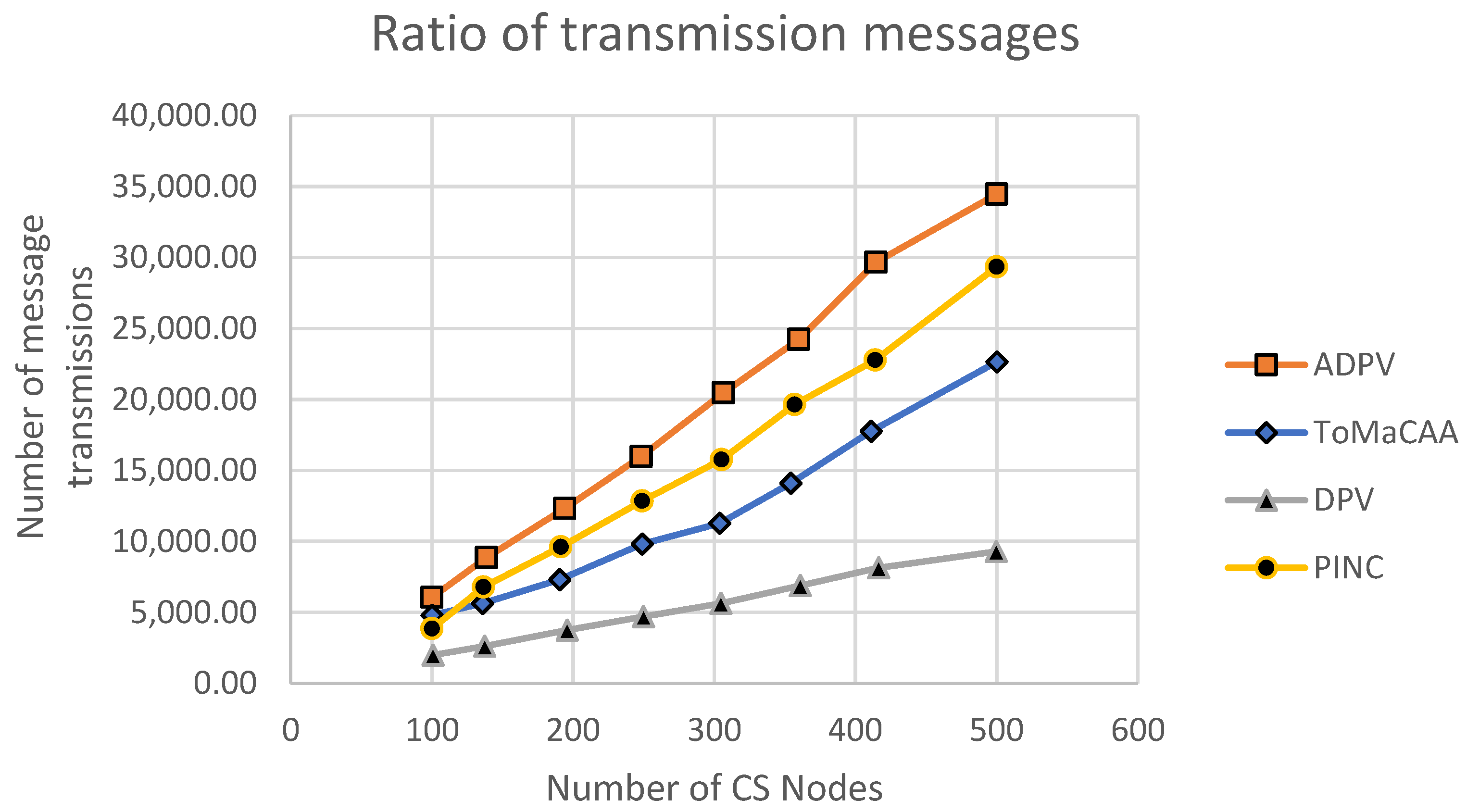
- Amount of transmission messages.
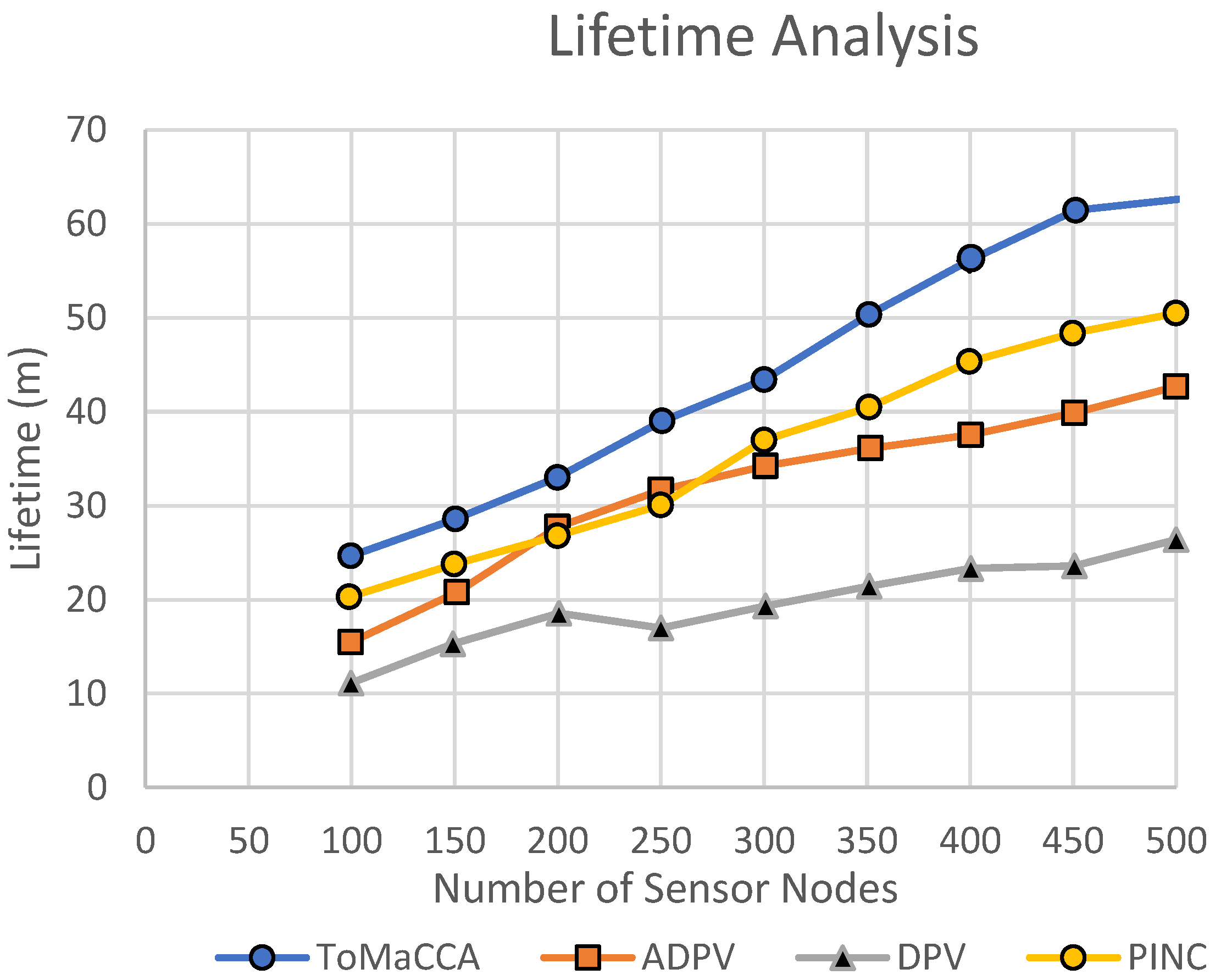
4.2.1. Network Lifetime
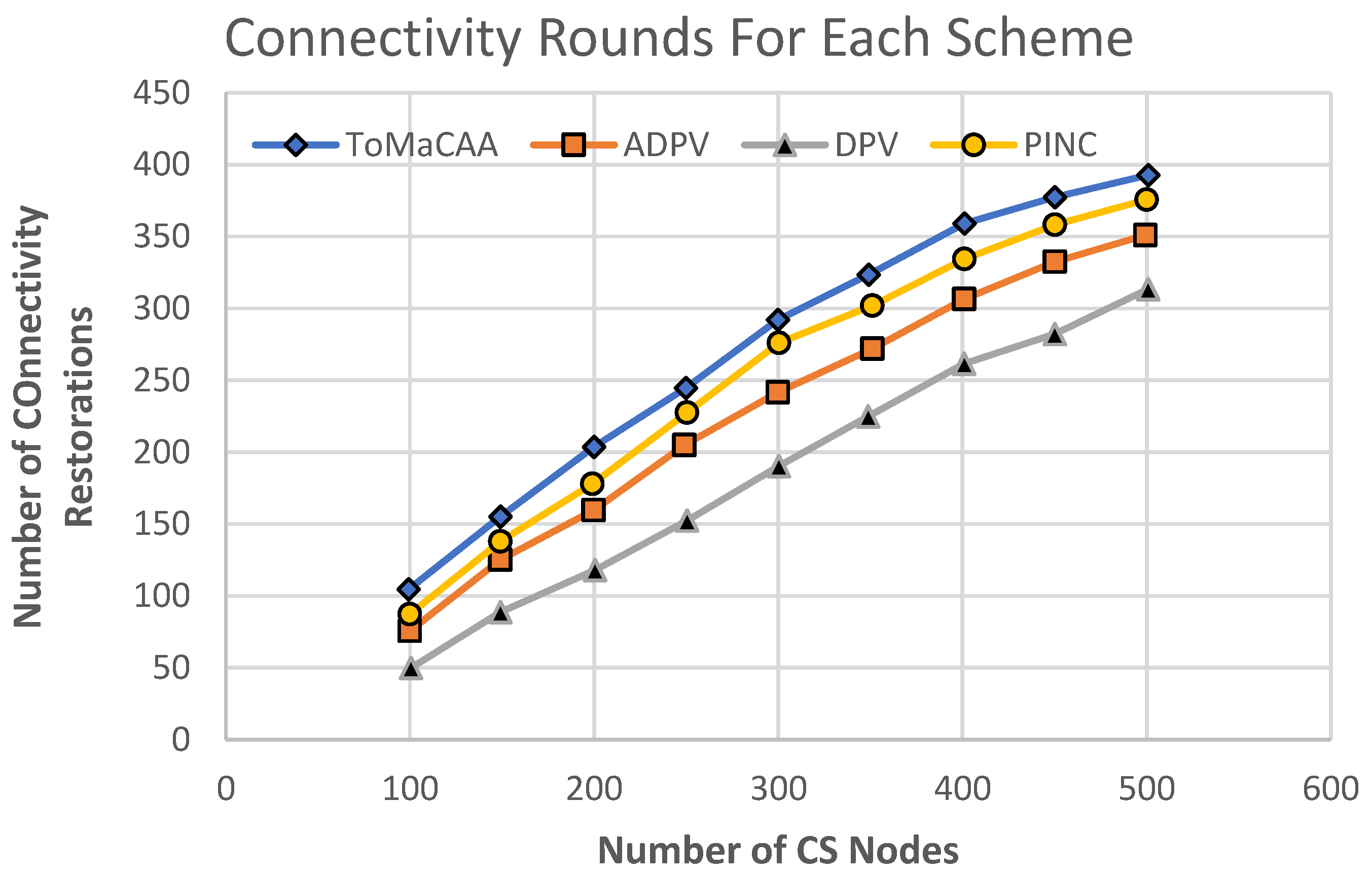
4.2.2. Node’s Fault Tolerance
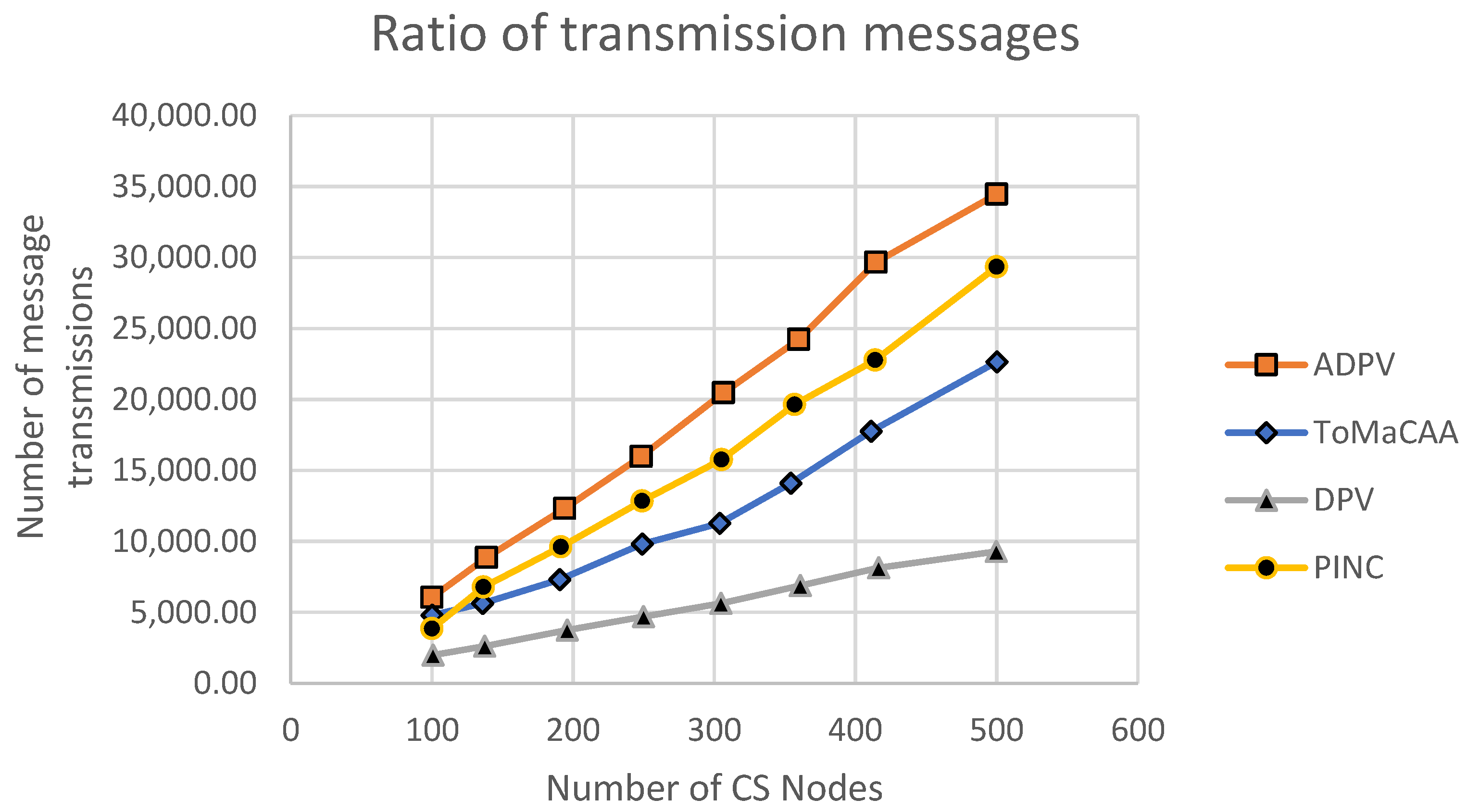
4.2.3. Number of Transmission Messages
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Younis, M.; Senturk, I.; Akkaya, K.; Lee, S.; Senel, F. Topology management techniques for tolerating node failures in wireless sensor networks: A survey. Comput. Netw. 2014, 58, 254–283. [Google Scholar] [CrossRef]
- Patra, C.; Mondal, A.; Bhaumik, P.; Chattopadhyay, M. Topology Management in Wireless Sensor Networks. In Wireless Sensor Networks and Energy Efficiency: Protocols, Routing and Management; IGI Global: Hershey, PA, USA, 2012; pp. 14–24. [Google Scholar]
- Bagci, H.; Korpeoglu, I.; Yazici, A. A Distributed Fault-Tolerant Topology Control Algorithm for Heterogeneous Wireless Sensor Networks. IEEE Trans. Parallel Distrib. Syst. 2014, 26, 914–923. [Google Scholar] [CrossRef]
- Mehmood, G.; Khan, M.Z.; Abbas, S.; Faisal, M.; Rahman, H.U. An Energy-Efficient and Cooperative Fault- Tolerant Communication Approach for Wireless Body Area Network. IEEE Access 2020, 8, 69134–69147. [Google Scholar] [CrossRef]
- Mehmood, G.; Khan, M.S.; Waheed, A.; Zareei, M.; Fayaz, M.; Sadad, T.; Kama, N.; Azmi, A. An Efficient and Secure Session Key Management Scheme in Wireless Sensor Network. Complexity 2021, 2021, 6577492. [Google Scholar] [CrossRef]
- Akkaya, K.; Senel, F.; Thimmapuram, A.; Uludag, S. Distributed Recovery from Network Partitioning in Movable Sensor/Actor Networks via Controlled Mobility. IEEE Trans. Comput. 2010, 59, 258–271. [Google Scholar] [CrossRef]
- Sahu, S.; Silakari, S. Distributed Multilevel k-Coverage Energy-Efficient Fault-Tolerant Scheduling for Wireless Sensor Networks. Wirel. Pers. Commun. 2022, 1–30. [Google Scholar] [CrossRef]
- Deniz, F.; Bagci, H.; Korpeoglu, I.; Yazıcı, A. An adaptive, energy-aware and distributed fault-tolerant topology-control algorithm for heterogeneous wireless sensor networks. Ad Hoc Netw. 2016, 44, 104–117. [Google Scholar] [CrossRef] [Green Version]
- Akram, V.K.; Dagdeviren, Z.A.; Dagdeviren, O.; Challenger, M. PINC: Pickup Non-Critical Node Based k-Connectivity Restoration in Wireless Sensor Networks. Sensors 2021, 21, 6418. [Google Scholar] [CrossRef]
- Awaad, M.H.; Jebbar, W.A. Extending the WSN lifetime by Dividing the Network Area into a Specific Zones. Int. J. Comput. Netw. Inf. Secur. 2015, 7, 33–39. [Google Scholar]
- Kumar, R.; Amgoth, T. Adaptive cluster-based relay-node placement for disjoint wireless sensor networks. Wirel. Netw. 2020, 26, 651–666. [Google Scholar] [CrossRef]
- Wang, X.; Sheng, M.; Liu, M.; Zhai, D.; Zhang, Y. RESP: A k-connected residual energy-aware topology control algorithm for ad hoc networks. In Proceedings of the 2013 IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1009–1014. [Google Scholar]
- Lee, S.; Younis, M.; Lee, M. Connectivity restoration in a partitioned wireless sensor network with assured fault tolerance. Ad Hoc Netw. 2015, 24, 1–19. [Google Scholar] [CrossRef]
- Kar, P.; Roy, A.; Misra, S. Connectivity Reestablishment in Self-Organizing Sensor Networks with Dumb Nodes. ACM Trans. Auton. Adapt. Syst. 2016, 10, 1–30. [Google Scholar] [CrossRef]
- Roy, A.; Misra, S.; Kar, P.; Mondal, A. Topology Control for Self-Adaptation in Wireless Sensor Networks with Temporary Connection Impairment. ACM Trans. Auton. Adapt. Syst. 2017, 11, 1–34. [Google Scholar] [CrossRef]
- Yin, Z.; Li, F.; Shen, M.; Wang, Y. Fault-tolerant topology for energy-harvesting heterogeneous wireless sensor networks. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 6761–6766. [Google Scholar]
- Stein, M.; Petry, T.; Schweizer, I.; Brachmann, M.; Mühlhäuser, M. Topology control in wireless sensor networks: What blocks the breakthrough? In Proceedings of the 2016 IEEE 41st Conference on Local Computer Networks (LCN), Dubai, United Arab Emirates, 7–10 November 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 389–397. [Google Scholar]
- Senturk, I.F.; Akkaya, K.; Yilmaz, S. Distributed relay node positioning for connectivity restoration in partitioned wireless sensor networks. In Proceedings of the 2012 IEEE Symposium on Computers and Communications (ISCC), Cappadocia, Turkey, 1–4 July 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 301–306. [Google Scholar]
- Misra, S.; Mali, G.; Mondal, A. Distributed topology management for wireless multimedia sensor networks: Exploiting connectivity and cooperation. Int. J. Commun. Syst. 2015, 28, 1367–1386. [Google Scholar] [CrossRef]
- Mohapatra, H.; Rath, A.K. Fault tolerance in WSN through uniform load distribution function. Int. J. Sens. Wirel. Commun. Control 2021, 11, 385–394. [Google Scholar] [CrossRef]
- Rajan, M.S.; Dilip, G.; Kannan, N.; Namratha, M.; Majji, S.; Mohapatra, S.K.; Patnala, T.R.; Karanam, S.R. Diagnosis of fault node in wireless sensor networks using adaptive neuro-fuzzy inference system. Appl. Nanosci. 2021, 1–9. [Google Scholar] [CrossRef]
- Kluge, R.; Stein, M.; Varró, G.; Schürr, A.; Hollick, M.; Mühlhäuser, M. A systematic approach to constructing families of incremental topology control algorithms using graph transformation. Softw. Syst. Modeling 2019, 18, 279–319. [Google Scholar] [CrossRef] [Green Version]
- Hong, Z.; Wang, R.; Li, X. A clustering-tree topology control based on the energy forecast for heterogeneous wireless sensor networks. IEEE/CAA J. Autom. Sin. 2016, 3, 68–77. [Google Scholar]
- Katiyar, S.; Vaid, R. Topology management scheme to reduce data loss and enhance network lifetime: T-MAIDA. In Proceedings of the 2017 8th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Delhi, India, 3–5 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–7. [Google Scholar]
- Singh, A.; Indira, G.; Monica, K.; Tiwari, R.; Kala, A.; Routray, S.K. Emerging characteristics in wireless sensor networks: Statistical viewpoints. In Proceedings of the 2017 International Conference on IoT and Application (ICIOT), Nagapattinam, India, 19–20 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–4. [Google Scholar]
- Kamble, A.A.; Patil, B. Systematic analysis and review of path optimization techniques in WSN with mobile sink. Comput. Sci. Rev. 2021, 41, 100412. [Google Scholar] [CrossRef]
- Khan, M.Z. Fault management in wireless sensor networks. Comput. Sci. Telecommun. 2013, 37, 3–17. [Google Scholar]
- Almaiah, M.A. A new scheme for detecting malicious attacks in wireless sensor networks based on blockchain technology. In Artificial Intelligence and Blockchain for Future Cybersecurity Applications; Springer: Berlin/Heidelberg, Germany, 2021; pp. 217–234. [Google Scholar]
- Mahmood, T.; Li, J.; Pei, Y.; Akhtar, F.; Butt, S.A.; Ditta, A.; Qureshi, S. An intelligent fault detection approach based on reinforcement learning system in wireless sensor network. J. Supercomput. 2022, 78, 3646–3675. [Google Scholar] [CrossRef]
- Mehmood, G.; Khan, M.Z.; Fayaz, M.; Faisal, M.; Rahman, H.U.; Gwak, J. An Energy-Efficient Mobile Agent-Based Data Aggregation Scheme for Wireless Body Area Networks. Comput. Mater. Contin. 2022, 70, 5929–5948. Available online: http://www.techscience.com/cmc/v70n3/44971 (accessed on 29 March 2022). [CrossRef]
- Abu Al-Haija, Q.; Krichen, M.; Abu Elhaija, W. Machine-learning-based darknet traffic detection system for IoT applications. Electronics 2022, 11, 556. [Google Scholar] [CrossRef]
- Jabbar, R.; Dhib, E.; Ben Said, A.; Krichen, M.; Fetais, N.; Zaidan, E.; Barkaoui, K. Blockchain Technology for Intelligent Transportation Systems: A Systematic Literature Review. IEEE Access 2022, 10, 20995–21031. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Terms | Notations |
|---|---|
| Conf_m | Configuration message |
| Info_m | Information message (contain node IDs, number of hops from the TM node) |
| Pt | Total paths to be stored (maximum of 5) |
| Pcost | Path cost |
| U | Union of two paths |
| CS | Common sensor node |
| TM | Topology Manager node |
| Tmin | Minimum threshold used to drop a link in the initialization phase |
| Tmax | Maximum threshold used to drop a link in the initialization phase |
| RSSI | Received signal strength indicator |
| ϕ | Phase of the signal belonging to the stored link |
| S1 neighbor list | S2 neighbor list | S3 neighbor list | S4 neighbor list | ||||
| TM node | ɸ0 | TM node | ɸ0′ | TM node | ɸ0″ | S2 | ɸ1′″ |
| S2 | ɸ1 | S1 | ɸ2′ | S2 | ɸ1″ | S3 | ɸ4′″ |
| S3 | ɸ4 | S3 | ɸ3′ | S1 | ɸ4″ | S1 | ɸ2′″ |
| S4 | ɸ3 | S4 | ɸ1′ | S4 | ɸ3″ | S6 | ɸ3′″ |
| S5 | ɸ2 | S6 | ɸ4′ | S6 | ɸ2″ | S5 | ɸ5′″ |
| S5 neighbor list | S6 neighbor list | S7 neighbor list | |||||
| S1 | ɸ4″″ | S3 | ɸ2′″″ | S2 | ɸ4″″″ | ||
| S2 | ɸ3″″ | S2 | ɸ4′″″ | S4 | ɸ1″″″ | ||
| S4 | ɸ2″″ | S4 | ɸ1′″″ | S1 | ɸ5″″″ | ||
| S7 | ɸ1″″ | S5 | ɸ5′″″ | S6 | ɸ3″″″ | ||
| S6 | ɸ5″″ | S7 | ɸ3′″″ | S5 | ɸ2″″″ | ||
| S1 neighbor list | S2 neighbor list | S3 neighbor list | S4 neighbor list | ||||
| TM node | ɸ0 | TM node | ɸ0′ | TM node | ɸ0″ | S2 | ɸ1′″ |
| S5 neighbor list | S6 neighbor list | S7 neighbor list | |||||
| S2 | ɸ3″″ | S3 | ɸ2′″″ | S2 | ɸ4″″″ | ||
| S1 neighbor list | S2 neighbor list | S3 neighbor list | S4 neighbor list | S5 neighbor list | |||||
| TM node | ɸ0 | TM node | ɸ0′ | TM node | ɸ0″ | S2 | ɸ1′″ | S2 | ɸ3″″ |
| S6 neighbor list | S7 neighbor list | ||||||||
| S3 | ɸ2′″″ | S2 | ɸ4″″″ | ||||||
| Parameters | Values |
|---|---|
| Area of deployment | 600 m × 600 m |
| Rmax: Original transmission range of nodes | 130 m |
| CSn: Number if CS node | 100–500 |
| TMn: Number of TM nodes | (5–10) % of CSn |
| K: Degree of disjoint connectivity | 5 |
| H: Number of hops for neighbourhood | 1, 2 |
| α: Path loss exponent | 2 |
| Packet loss Rate | 10% |
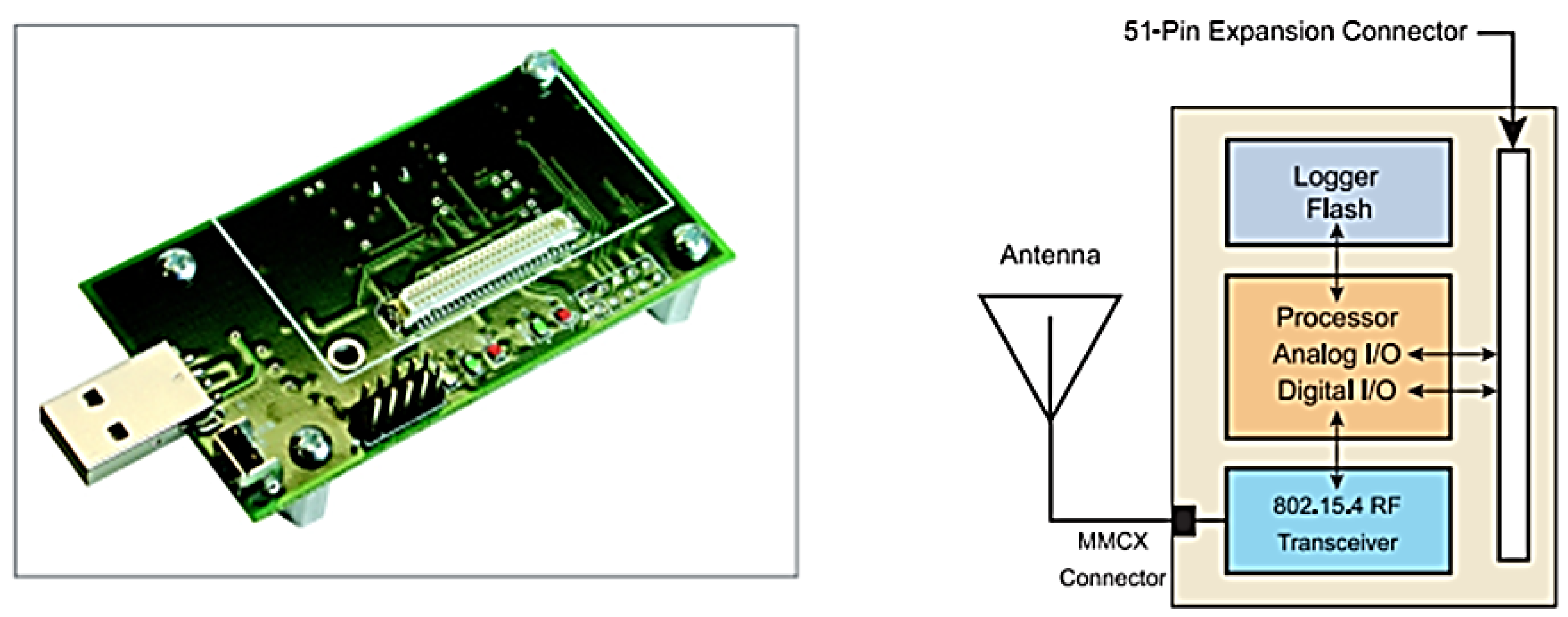
| MICAz Mote Radio Model Parameters | Values |
|---|---|
| Range of transmission power | 0–1 mw (−24 dbm–0 dbm) |
| Range of frequency spectrum | 2.4 GHz |
| MAC protocol used (LR-WPAN) | IEEE 802.15.4 Standard |
| Max up to EPA (Effective Projected Area) range | 130 m |
| Max up to Omni range | 86 m |
| Consumption of energy in receiving: Rx | 19.8 mA |
| Consumption of energy in transmission: (Tx-1) | 11.3 mA @ −10 dBm, |
| Consumption of energy in transmission: (Tx-2) | 14.4 mA @ −5 dBm |
| Consumption of energy in transmission: (Tx-3) | 17.4 mA @ 0 dBm, |
| Listening: idle mode | 20 µA |
| Sleep mode | 1 µA |
| packet delivery ratio (100 %) | For PPA, up to 80 m and for Omni, up to 60 m. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Haq, M.Z.U.; Khan, M.Z.; Rehman, H.U.; Mehmood, G.; Binmahfoudh, A.; Krichen, M.; Alroobaea, R. An Adaptive Topology Management Scheme to Maintain Network Connectivity in Wireless Sensor Networks. Sensors 2022, 22, 2855. https://doi.org/10.3390/s22082855
Haq MZU, Khan MZ, Rehman HU, Mehmood G, Binmahfoudh A, Krichen M, Alroobaea R. An Adaptive Topology Management Scheme to Maintain Network Connectivity in Wireless Sensor Networks. Sensors. 2022; 22(8):2855. https://doi.org/10.3390/s22082855
Chicago/Turabian StyleHaq, Muhammad Zia Ul, Muhammad Zahid Khan, Haseeb Ur Rehman, Gulzar Mehmood, Ahmed Binmahfoudh, Moez Krichen, and Roobaea Alroobaea. 2022. "An Adaptive Topology Management Scheme to Maintain Network Connectivity in Wireless Sensor Networks" Sensors 22, no. 8: 2855. https://doi.org/10.3390/s22082855
APA StyleHaq, M. Z. U., Khan, M. Z., Rehman, H. U., Mehmood, G., Binmahfoudh, A., Krichen, M., & Alroobaea, R. (2022). An Adaptive Topology Management Scheme to Maintain Network Connectivity in Wireless Sensor Networks. Sensors, 22(8), 2855. https://doi.org/10.3390/s22082855