
A Further Theoretical Study of Capacitive Pressure Sensors Based on Thin Film Elastic Deflection and Parallel Plate Capacitor: Refined Closed-Form Solution and Numerical Calibration


Abstract
1. Introduction
2. Materials and Methods
3. Refined Closed-Form Solution
4. Results and Discussion
4.1. Validity of the Closed-Form Solution Obtained
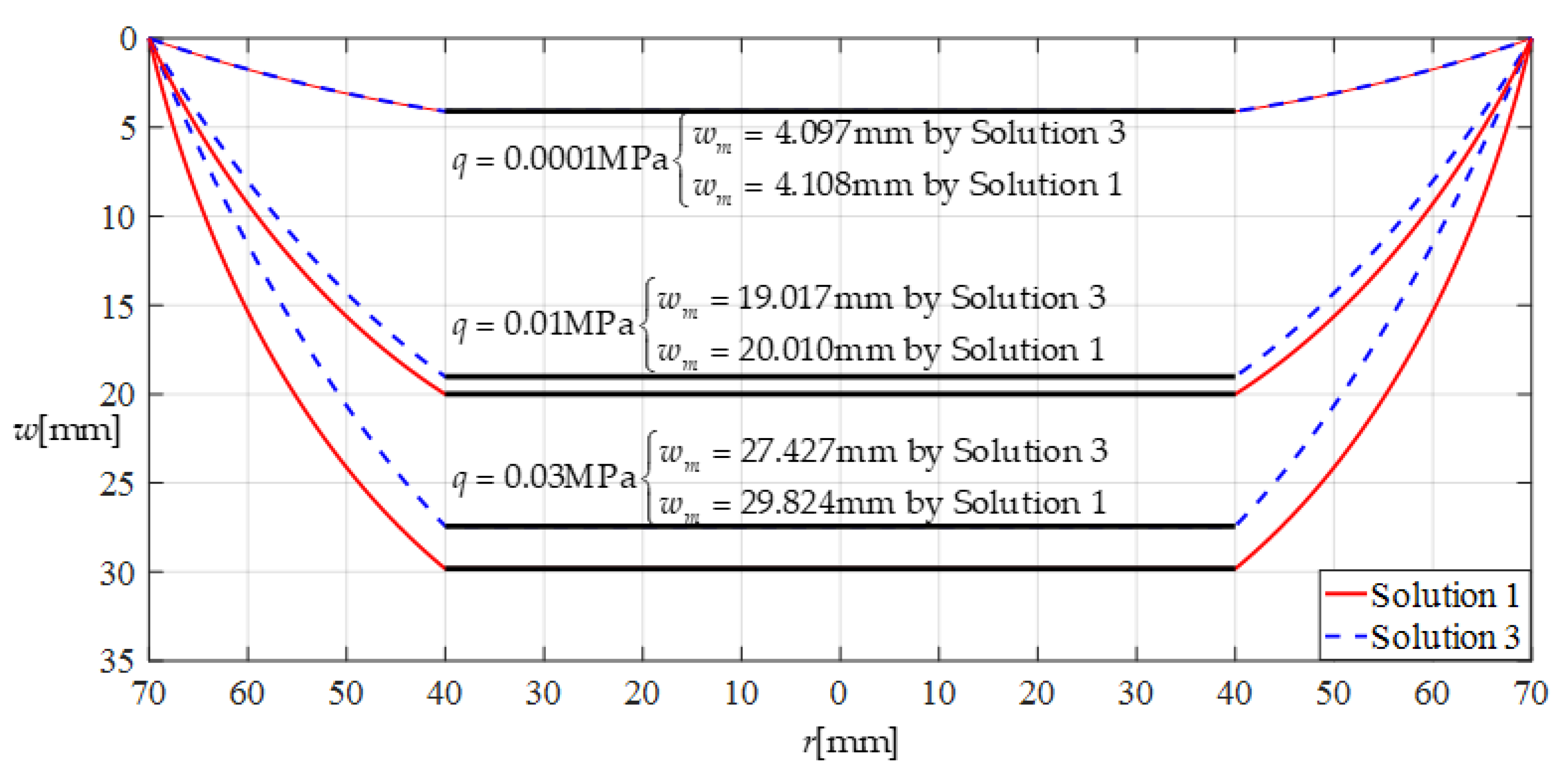
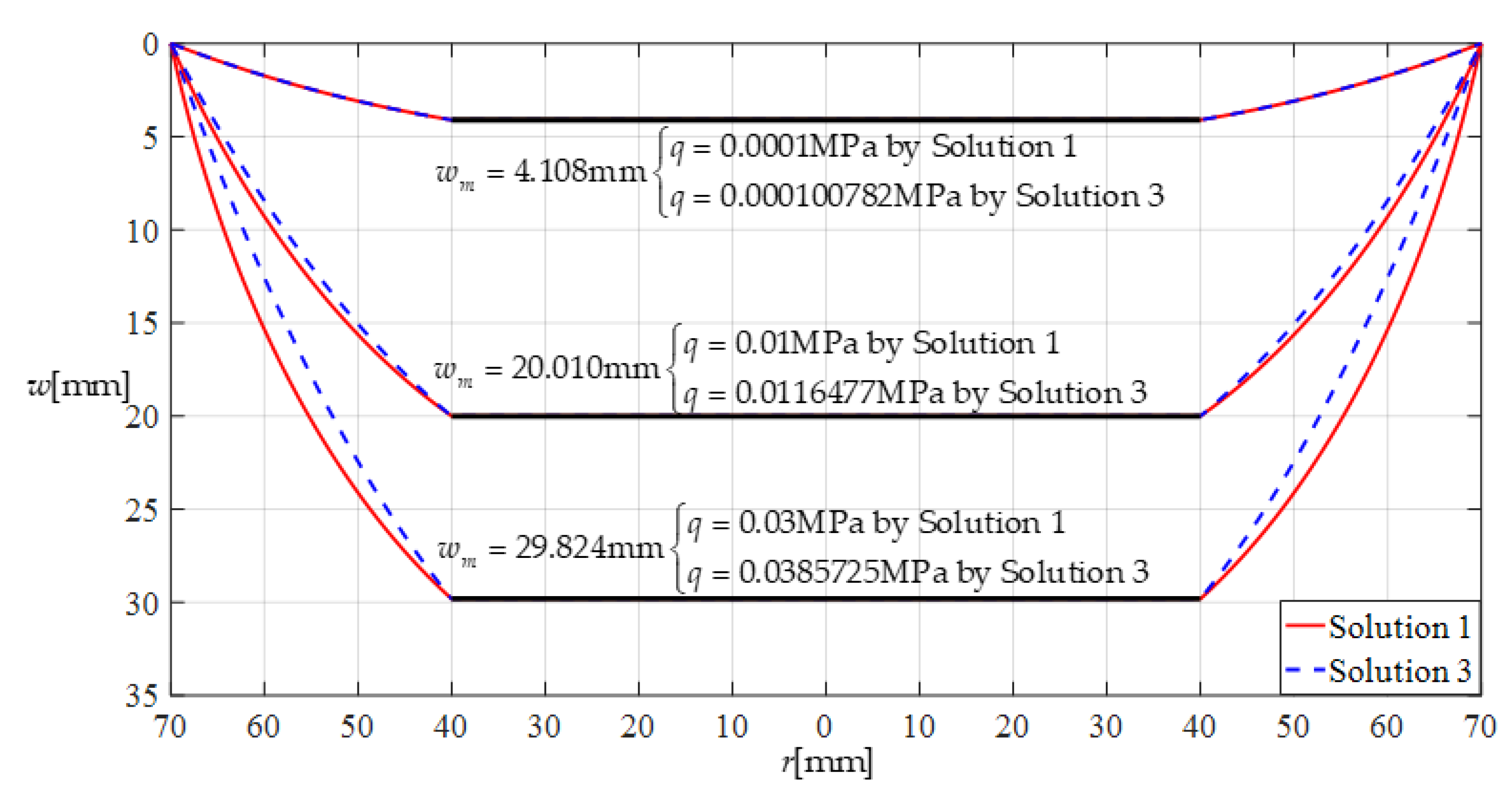
4.2. Comparison of the Closed-Form Solutions before and after Improvement
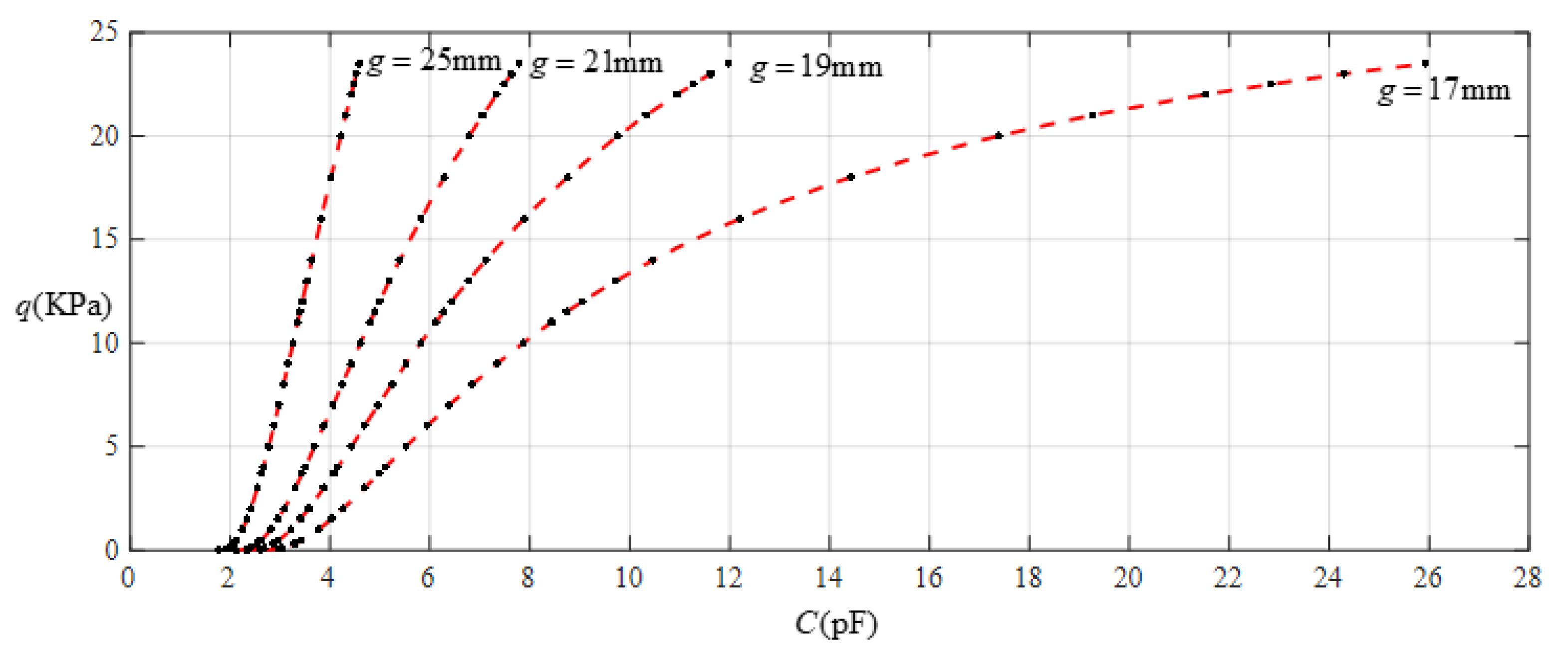
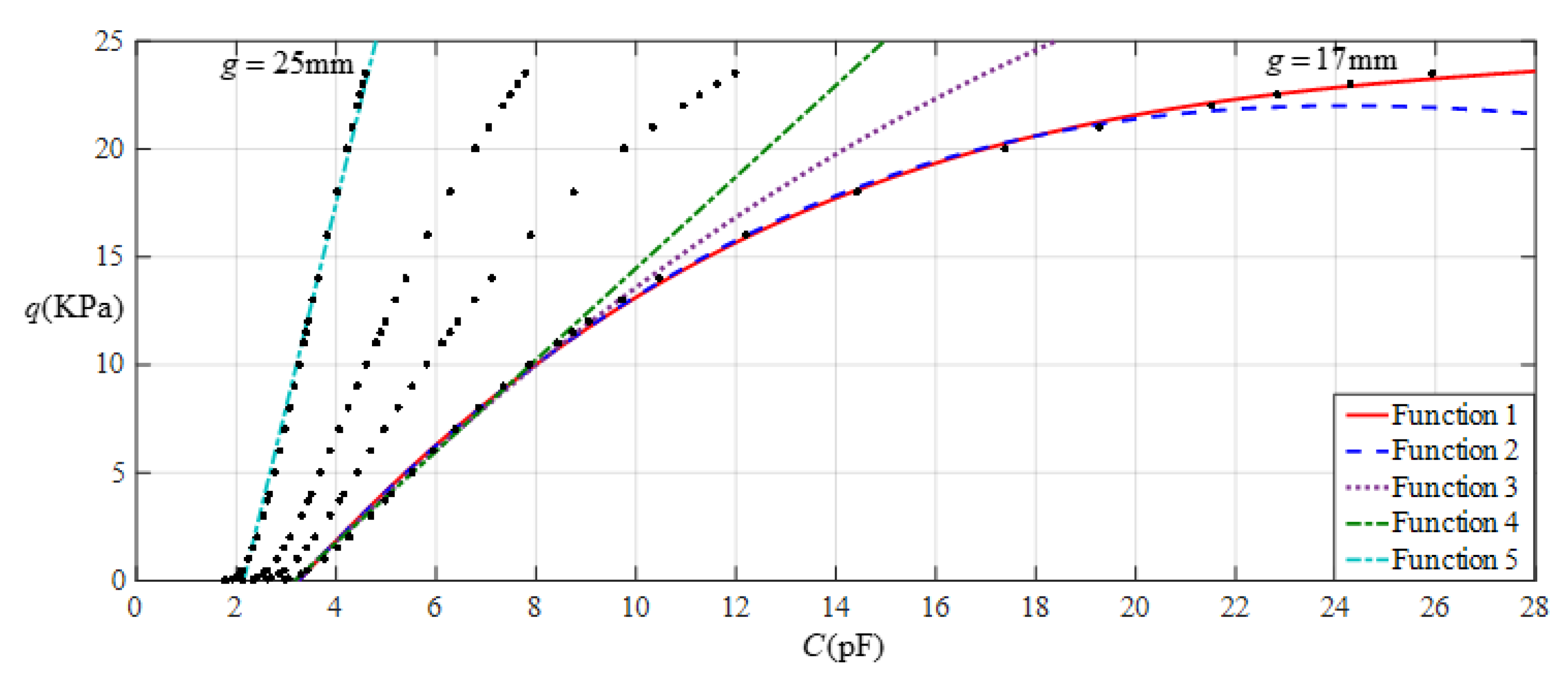
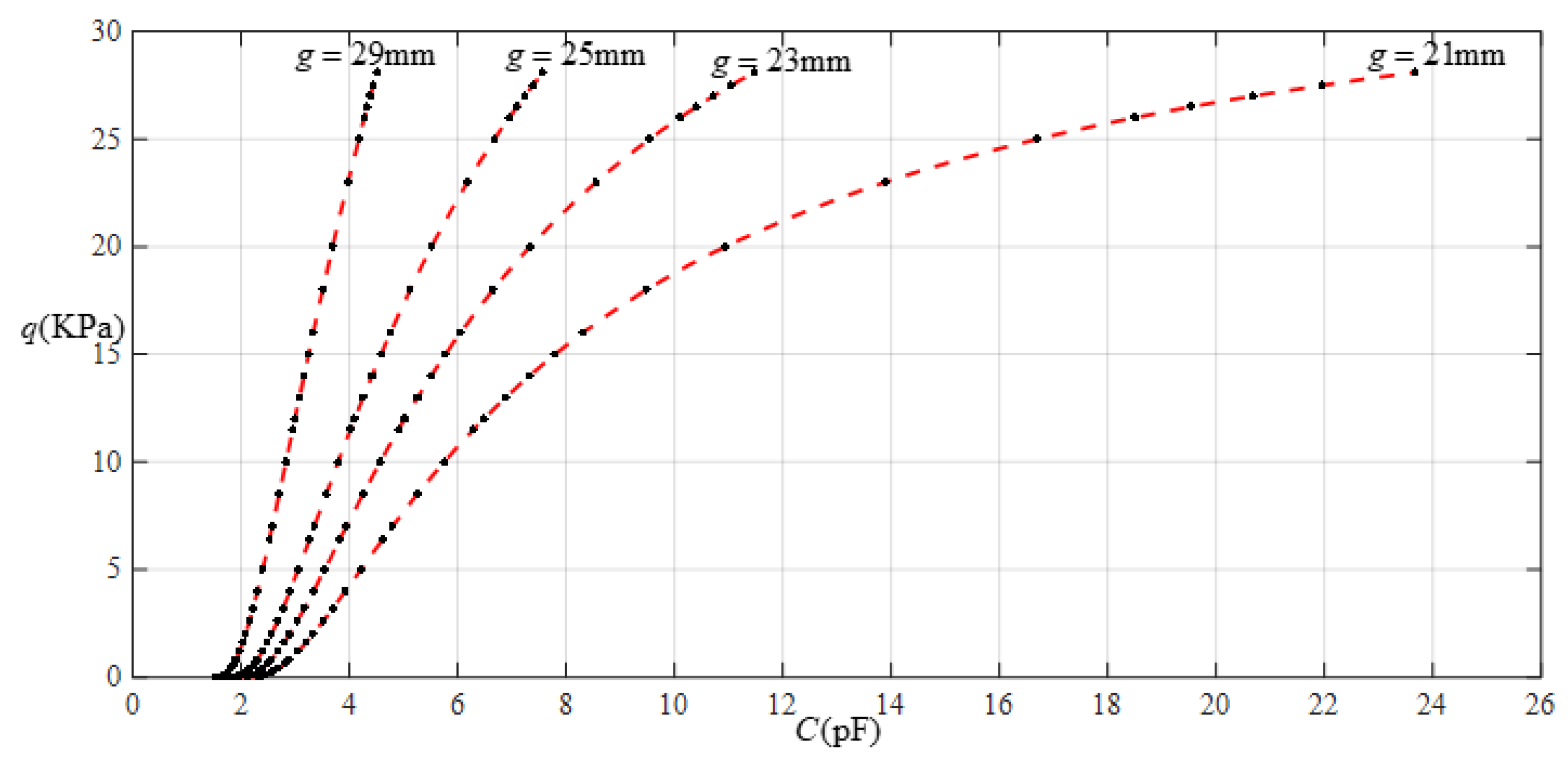
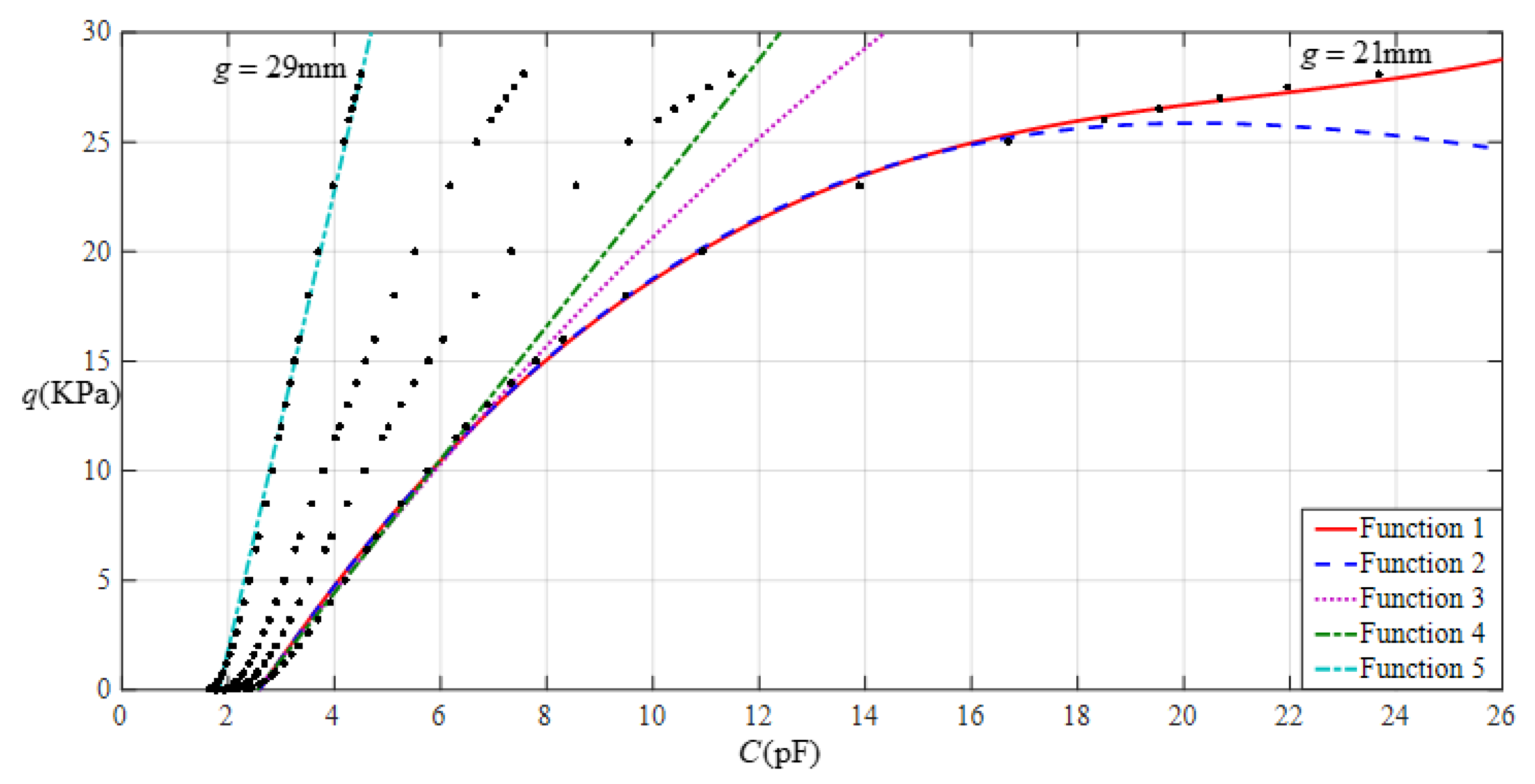
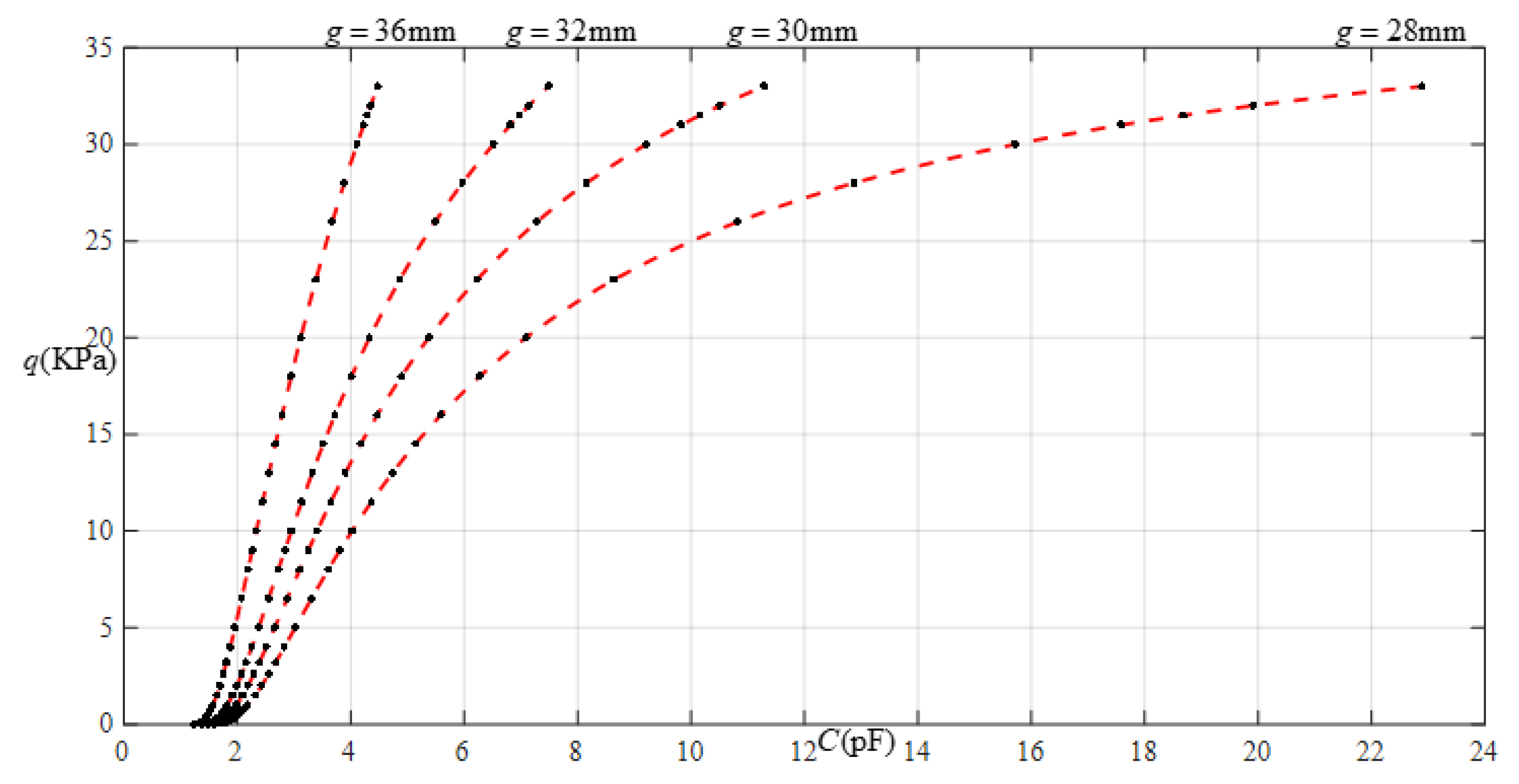
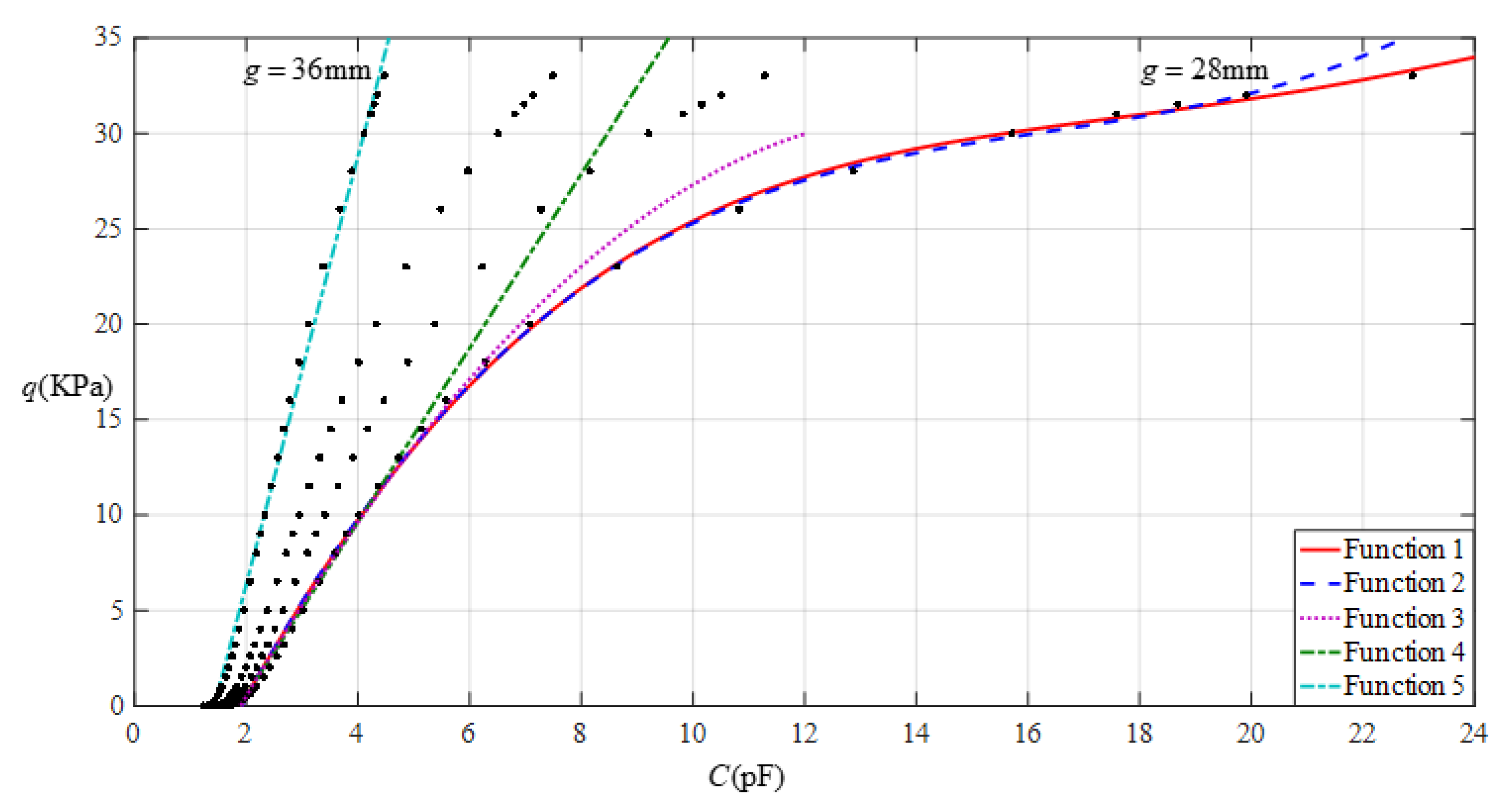
4.3. Numerical Calibration Based on the Closed-Form Solution Obtained
4.4. Effect of Important Parametric Variations on Input–Output Relationships
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Bernardo, P.; Iulianelli, A.; Macedonio, F.; Drioli, E. Membrane technologies for space engineering. J. Membr. Sci. 2021, 626, 119177. [Google Scholar] [CrossRef]
- Suresh, K.; Katara, N. Design and development of circular ceramic membrane for wastewater treatment. Mater. Today Proc. 2021, 43, 2176–2181. [Google Scholar] [CrossRef]
- Tai, Y.; Zhou, K.; Chen, N. Dynamic Properties of Microresonators with the Bionic Structure of Tympanic Membrane. Sensors 2020, 20, 6958. [Google Scholar] [CrossRef]
- Molla-Alipour, M.; Ganji, B.A. Analytical analysis of mems capacitive pressure sensor with circular diaphragm under dynamic load using differential transformation method (DTM). Acta Mech. Solida Sin. 2015, 28, 400–408. [Google Scholar] [CrossRef]
- Yashaswini, P.R.; Mamatha, N.; Srikanth, P.C. Circular diaphragm-based MOEMS pressure sensor using ring resonator. Int. J. Inf. Technol. 2020, 13, 213–220. [Google Scholar] [CrossRef]
- Gabbi, R.; Rasia, L.A.; Müller, D.C.D.M.; Beltrán, J.R.; Silva, J.A.G.D.; Reimbold, M.M.P. Practical Approach Design Piezoresistive Pressure Sensor in Circular Diaphragm. J. Mater. Sci. Eng. B 2019, 9, 85–91. [Google Scholar]
- Wang, J.; Lou, Y.; Wang, B.; Sun, Q.; Zhou, M.; Li, X. Highly sensitive, breathable, and flexible pressure sensor based on electrospun membrane with assistance of AgNW/TPU as composite dielectric layer. Sensors 2020, 20, 2459. [Google Scholar] [CrossRef]
- Lian, Y.S.; Sun, J.Y.; Zhao, Z.H.; Li, S.Z.; Zheng, Z.L. A refined theory for characterizing adhesion of elastic coatings on rigid substrates based on pressurized blister test methods: Closed-form solution and energy release rate. Polymers 2020, 12, 1788. [Google Scholar] [CrossRef]
- Li, X.; Sun, J.Y.; Shi, B.B.; Zhao, Z.H.; He, X.T. A theoretical study on an elastic polymer thin film-based capacitive wind-pressure sensor. Polymers 2020, 12, 2133. [Google Scholar] [CrossRef]
- Jindal, S.K.; Varma, M.A.; Thukral, D. Comprehensive assessment of MEMS double touch mode capacitive pressure sensor on utilization of SiC film as primary sensing element: Mathematical modelling and numerical simulation. Microelectron. J. 2018, 73, 30–36. [Google Scholar] [CrossRef]
- Lee, H.Y.; Choi, B. Theoretical and experimental investigation of the trapped air effect on air-sealed capacitive pressure sensor. Sens. Actuat. A-Phys. 2015, 221, 104–114. [Google Scholar] [CrossRef]
- Shu, J.F.; Yang, R.R.; Chang, Y.Q.; Guo, X.Q.; Yang, X. A flexible metal thin film strain sensor with micro/nano structure for large deformation and high sensitivity strain measurement. J. Alloy. Compd. 2021, 879, 160466. [Google Scholar] [CrossRef]
- Zhang, D.Z.; Jiang, C.X.; Tong, J.; Zong, X.Q.; Hu, W. Flexible Strain Sensor Based on Layer-by-Layer Self-Assembled Graphene/Polymer Nanocomposite Membrane and Its Sensing Properties. J. Electron. Mater. 2018, 47, 2263–2270. [Google Scholar] [CrossRef]
- Han, X.D.; Li, G.; Xu, M.H.; Ke, X.; Chen, H.Y.; Feng, Y.J.; Yan, H.P.; Li, D.T. Differential MEMS capacitance diaphragm vacuum gauge with high sensitivity and wide range. Vacuum 2021, 191, 110367. [Google Scholar] [CrossRef]
- Chau, K.H.L.; Fung, C.D.; Harris, P.R.; Dahrooge, G.A. A versatile polysilicon diaphragm pressure sensor chip. In Proceedings of the International Electron Devices Meeting 1991 [Technical Digest], Washington, DC, USA, 8–11 December 1991; pp. 761–764. [Google Scholar]
- Fonseca, M.; Allen, G.; Kroh, J.; White, J. Flexible wireless passive pressure sensors for biomedical applicatons. In Proceedings of the Technical Digest Solid-State Sensor, Actuator, and Microsystems Workshop, Hilton Head Island, SC, USA, 4–8 June 2006; pp. 37–42. [Google Scholar]
- Xiong, J.J.; Li, Y.; Hong, Y.P.; Zhang, B.Z.; Cui, T.H.; Tan, Q.L.; Zheng, S.J.; Liang, T. Wireless LTCC-based capacitive pressure sensor for harsh environment. Sensor Actuat. A-Phys. 2013, 197, 30–37. [Google Scholar] [CrossRef]
- Marsi, N.; Majlis, B.Y.; Hamzah, A.A.; Mohd-Yasin, F. Development of high temperature resistant of 500 °C employing silicon carbide (3C-SiC) based MEMS pressure sensor. Microsyst. Technol. 2015, 21, 319–330. [Google Scholar] [CrossRef]
- Tang, W.; Zheng, B.X.; Liu, L.; Chen, Z.; Zhang, H.X. Complementary metal-oxide semiconductor-compatible silicon carbide pressure sensors based on bulk micromachining. Micro Nano Lett. 2011, 6, 265–268. [Google Scholar] [CrossRef]
- Berger, C.N.; Dirschka, M.; Vijayaraghavan, A. Ultra-thin graphene–polymer heterostructure membranes. Nanoscale 2016, 8, 17928–17939. [Google Scholar] [CrossRef]
- Lee, G.H.; Cooper, R.C.; An, S.J.; Lee, S.; van der Zande, A.; Petrone, N.; Hammerherg, A.G.; Lee, C.; Crawford, B.; Oliver, W.; et al. High-strength chemical-vapor-deposited graphene and grain boundaries. Science 2013, 340, 1073–1076. [Google Scholar] [CrossRef]
- Akinwande, D.; Brennan, C.J.; Bunch, J.S.; Egberts, P.; Felts, J.R.; Gao, H.J.; Huang, R.; Kim, J.S.; Li, T.; Li, Y.; et al. A review on mechanics and mechanical properties of 2D materials—Graphene and beyond. Extrem. Mech. Lett. 2017, 13, 42–77. [Google Scholar] [CrossRef]
- Berger, C.; Phillips, R.; Pasternak, I.; Sobieski, J.; Strupinski, W.; Vijayaraghavan, A. Touch-mode capacitive pressure sensor with graphene-polymer heterostructure membrane. 2D Mater. 2018, 5, 015025. [Google Scholar] [CrossRef]
- Lian, Y.S.; Sun, J.Y.; Ge, X.M.; Yang, Z.X.; He, X.T.; Zheng, Z.L. A theoretical study of an improved capacitive pressure sensor: Closed-form solution of uniformly loaded annular membranes. Measurement 2017, 111, 84–92. [Google Scholar] [CrossRef]
- Riaz, M.; Kanwal, N. An improved parallel-plate capacitor apparatus for the estimation of dielectric constants of solid materials. Eur. J. Phys. 2019, 40, 025502. [Google Scholar] [CrossRef]
- Dowlati, S.; Rezazadeh, G.; Afrang, S.; Sheykhlou, M.; Pasandi, A.M. An Accurate Study on Capacitive Microphone with Circular Diaphragm Using a Higher Order Elasticity Theory. Lat. Am. J. Solids Struct. 2019, 13, 590–609. [Google Scholar] [CrossRef][Green Version]
- Wang, X.M.; Li, M.X.; Wang, C.H. Numerical analysis of capacitive pressure micro-sensors. Sci. China Ser. E Technol. Sci. 2005, 48, 202–213. [Google Scholar] [CrossRef]
- Lian, Y.S.; Sun, J.Y.; Yang, Z.X.; He, X.T.; Zheng, Z.L. Closed-form solution of well-known Hencky problem without small-rotation-angle assumption. Z. Angew. Math. Mech. 2016, 96, 1434–1441. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| q/KPa | σm/MPa | wm/mm | C/pF | |||
|---|---|---|---|---|---|---|
| g = 17 mm | g = 19 mm | g = 21 mm | g = 25 mm | |||
| 0.00 | 0.00 | 0.000 | 2.619 | 2.344 | 2.121 | 1.781 |
| 0.06 | 0.03 | 2.022 | 2.973 | 2.623 | 2.346 | 1.938 |
| 0.10 | 0.04 | 2.398 | 3.050 | 2.682 | 2.394 | 1.970 |
| 0.30 | 0.08 | 3.462 | 3.289 | 2.866 | 2.539 | 2.068 |
| 0.45 | 0.11 | 3.965 | 3.416 | 2.962 | 2.614 | 2.117 |
| 1.00 | 0.19 | 5.184 | 3.769 | 3.223 | 2.816 | 2.247 |
| 1.50 | 0.25 | 5.942 | 4.027 | 3.410 | 2.957 | 2.337 |
| 2.00 | 0.30 | 6.548 | 4.260 | 3.576 | 3.081 | 2.413 |
| 3.00 | 0.40 | 7.511 | 4.693 | 3.876 | 3.301 | 2.546 |
| 3.70 | 0.46 | 8.066 | 4.984 | 4.073 | 3.443 | 2.630 |
| 4.00 | 0.49 | 8.283 | 5.108 | 4.155 | 3.502 | 2.664 |
| 5.00 | 0.57 | 8.938 | 5.523 | 4.425 | 3.692 | 2.772 |
| 6.00 | 0.64 | 9.512 | 5.947 | 4.694 | 3.876 | 2.875 |
| 7.00 | 0.72 | 10.029 | 6.388 | 4.964 | 4.059 | 2.974 |
| 8.00 | 0.79 | 10.500 | 6.851 | 5.239 | 4.241 | 3.071 |
| 9.00 | 0.85 | 10.935 | 7.342 | 5.521 | 4.424 | 3.166 |
| 10.00 | 0.92 | 11.340 | 7.867 | 5.813 | 4.610 | 3.260 |
| 11.00 | 0.98 | 11.720 | 8.434 | 6.117 | 4.799 | 3.353 |
| 11.50 | 1.01 | 11.902 | 8.735 | 6.274 | 4.895 | 3.400 |
| 12.00 | 1.05 | 12.079 | 9.049 | 6.434 | 4.992 | 3.446 |
| 13.00 | 1.11 | 12.420 | 9.723 | 6.767 | 5.190 | 3.540 |
| 14.00 | 1.17 | 12.745 | 10.464 | 7.118 | 5.394 | 3.633 |
| 16.00 | 1.28 | 13.352 | 12.208 | 7.885 | 5.823 | 3.823 |
| 18.00 | 1.40 | 13.914 | 14.431 | 8.756 | 6.285 | 4.017 |
| 20.00 | 1.51 | 14.439 | 17.385 | 9.762 | 6.787 | 4.216 |
| 21.00 | 1.56 | 14.689 | 19.266 | 10.329 | 7.056 | 4.319 |
| 22.00 | 1.62 | 14.931 | 21.526 | 10.945 | 7.338 | 4.423 |
| 22.50 | 1.64 | 15.050 | 22.837 | 11.274 | 7.484 | 4.475 |
| 23.00 | 1.67 | 15.167 | 24.297 | 11.618 | 7.635 | 4.529 |
| 23.50 | 1.68 | 15.283 | 25.933 | 11.980 | 7.789 | 4.583 |
| Functions | Pressure q/KPa | Capacitance C/pF | Functional Expressions |
|---|---|---|---|
| Function 1 | 0.06~23.5 | 2.973~25.933 | q = −9.4543 + 3.2678C − 0.1174C2 + 1.6969 × 10−3C3 − 5.9 860 × 10−6C4 |
| Function 2 | 0.06~22 | 2.973~21.526 | q = −9.1345 + 3.1225C − 9.8607 × 10−2C2 + 9.4000 × 10−4C3 |
| Function 3 | 0.06~14 | 2.973~10.464 | q = −7.7200 + 2.5500C − 4.1960 × 10−2C2 |
| Function 4 | 0.06~11 | 2.973~8.434 | q = −6.7190 + 2.1193C |
| Function 5 | 0.06~23.5 | 1.938~4.583 | q = −20.2787 + 9.4467C |
| Functions | Pressure q/KPa | Capacitance C/pF | Functional Expressions |
|---|---|---|---|
| Function 1 | 0.03~28.1 | 2.327~23.677 | q = −10.387 + 4.4539C − 1.7499 × 10−1 C2 + 1.8465 × 10−3C3 + 2.0127 × 10−5C4 |
| Function 2 | 0.03~26 | 2.327~18.503 | q = −10.320 + 4.4173C − 0.1713C2 + 2.0446 × 10−3C3 |
| Function 3 | 0.03~16 | 2.327~8.308 | q = −8.4201 + 3.4455C − 5.3760 × 10−2C2 |
| Function 4 | 0.03~12 | 2.327~6.484 | q = −7.7372 + 3.0429C |
| Function 5 | 0.03~28.1 | 1.641~4.507 | q = −19.0409 + 10.4528C |
| Function | Pressure q/KPa | Capacitance C/pF | Function Expression |
|---|---|---|---|
| Function 1 | 0.02~33 | 1.716~22.884 | q = −12.084 + 7.1260C − 0.4660C2 + 1.4223 × 10−2C3−1.6188 × 10−4C4 |
| Function 2 | 0.02~30 | 1.716~15.710 | q = −11.667 + 6.7954C − 0.3895C2 − 7.9564 × 10−3C3 |
| Function 3 | 0.02~20 | 1.716~7.089 | q = −10.232 + 5.7650C − 0.2012C2 |
| Function 4 | 0.02~13 | 1.716~4.734 | q = −8.6055 + 4.5583C |
| Function 5 | 0.02~33 | 1.312~4.477 | q = −16.2264 + 11.2672C |
| Functions | Pressure q/KPa | Capacitance C/pF | Functional Expressions |
|---|---|---|---|
| Function 1 | 0.04~16.5 | 2.967~26.183 | q = −6.6373 + 2.2999C − 8.3342 × 10−2C2 + 1.2233 × 10−3C3 − 4.3521 × 10−6C4 |
| Function 2 | 0.04~15.5 | 2.967~21.887 | q = −6.5162 + 2.2415C − 7.5228 × 10−2C2 + 8.4881 × 10−4C3 |
| Function 3 | 0.04~10 | 2.967~10.690 | q = −5.5317 + 1.8389C − 3.4383 × 10−2C2 |
| Function 4 | 0.04~8 | 2.967~8.691 | q = −4.6602 + 1.4732C |
| Function 5 | 0.04~16.5 | 1.935~4.590 | q = −14.1664 + 6.6212C |
| Functions | Pressure q/KPa | Capacitance C/pF | Functional Expressions |
|---|---|---|---|
| Function 1 | 0.03~9.4 | 3.004~25.933 | q = −3.9805 + 1.3871C−5.6008 × 10−2C2 + 1.0509 × 10−3C3−7.3096 × 10−6C4 |
| Function 2 | 0.03~8.8 | 3.004~21.526 | q = −3.7904 + 1.3020C−4.4844 × 10−2C2 + 5.2974 × 10−4C3 |
| Function 3 | 0.03~5.7 | 3.004~10.661 | q = −3.1774 + 1.0531C−1.9734 × 10−2C2 |
| Function 4 | 0.03~4.5 | 3.004~8.583 | q = −2.6689 + 0.8414C |
| Function 5 | 0.03~9.4 | 1.951~4.583 | q = −8.1551 + 3.8048C |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Li, B.; Zhang, Q.; He, X.-T.; Sun, J.-Y. A Further Theoretical Study of Capacitive Pressure Sensors Based on Thin Film Elastic Deflection and Parallel Plate Capacitor: Refined Closed-Form Solution and Numerical Calibration. Sensors 2022, 22, 2848. https://doi.org/10.3390/s22082848
Guo Y, Li B, Zhang Q, He X-T, Sun J-Y. A Further Theoretical Study of Capacitive Pressure Sensors Based on Thin Film Elastic Deflection and Parallel Plate Capacitor: Refined Closed-Form Solution and Numerical Calibration. Sensors. 2022; 22(8):2848. https://doi.org/10.3390/s22082848
Chicago/Turabian StyleGuo, Ying, Bo Li, Qi Zhang, Xiao-Ting He, and Jun-Yi Sun. 2022. "A Further Theoretical Study of Capacitive Pressure Sensors Based on Thin Film Elastic Deflection and Parallel Plate Capacitor: Refined Closed-Form Solution and Numerical Calibration" Sensors 22, no. 8: 2848. https://doi.org/10.3390/s22082848
APA StyleGuo, Y., Li, B., Zhang, Q., He, X.-T., & Sun, J.-Y. (2022). A Further Theoretical Study of Capacitive Pressure Sensors Based on Thin Film Elastic Deflection and Parallel Plate Capacitor: Refined Closed-Form Solution and Numerical Calibration. Sensors, 22(8), 2848. https://doi.org/10.3390/s22082848