
An Analytical Investigation of Anomaly Detection Methods Based on Sequence to Sequence Model in Satellite Power Subsystem


Abstract
:1. Introduction
2. Materials
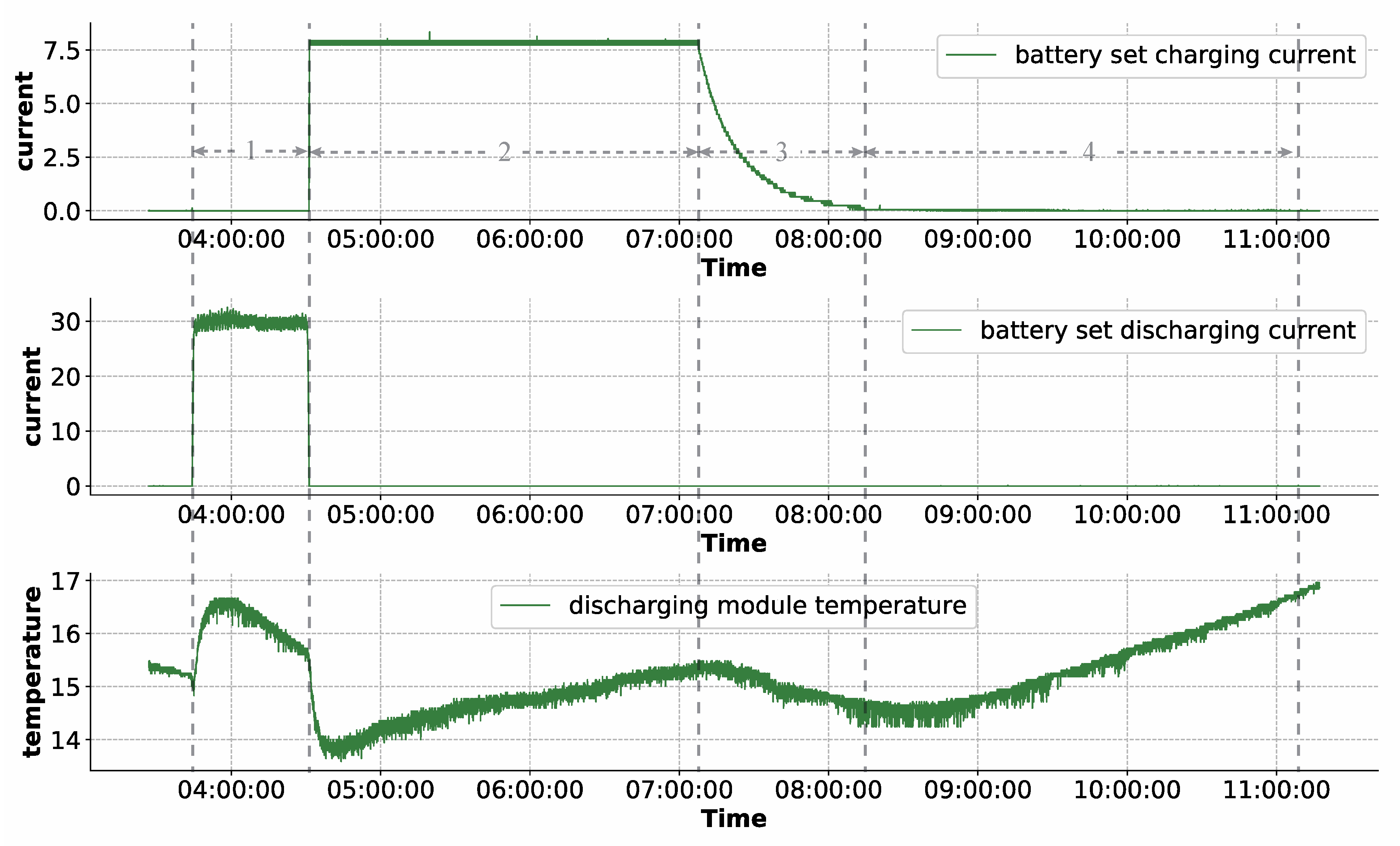
2.1. Satellite Power Subsystem
2.2. Sequence to Sequence Model
3. Research Methodology
3.1. Data Exploration and Preprocessing
3.2. Development of Seq2seq-Based Scheme
3.3. Result Acquisition
3.4. Performance Evaluation
4. Experiments and Discussions
4.1. Description of The Satellite Power Subsystem Telemetry Data
4.2. Data Preprocessing
4.3. Model Training
4.4. Performance Evaluation
4.4.1. Evaluation on Model’s Reconstruction Capability
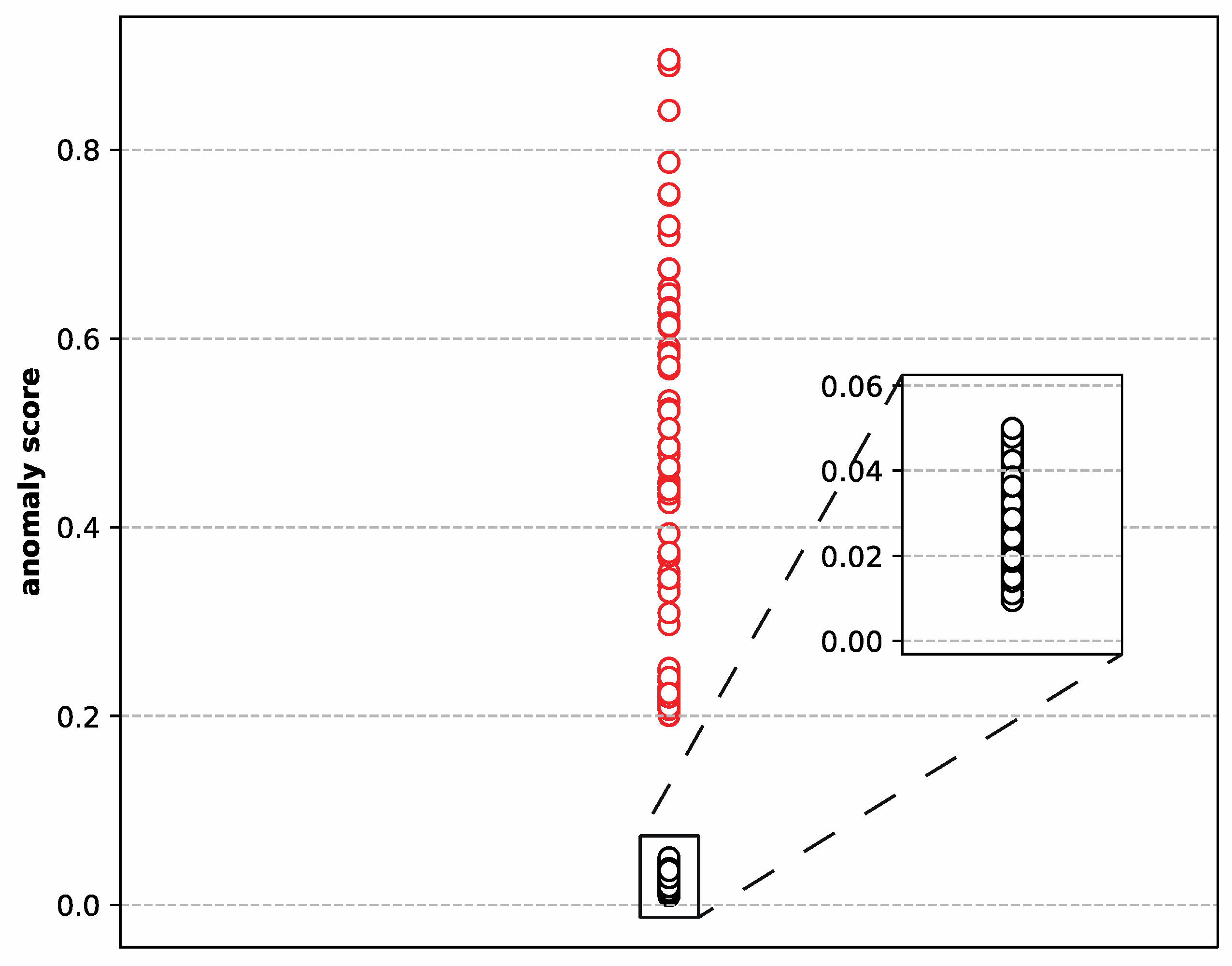
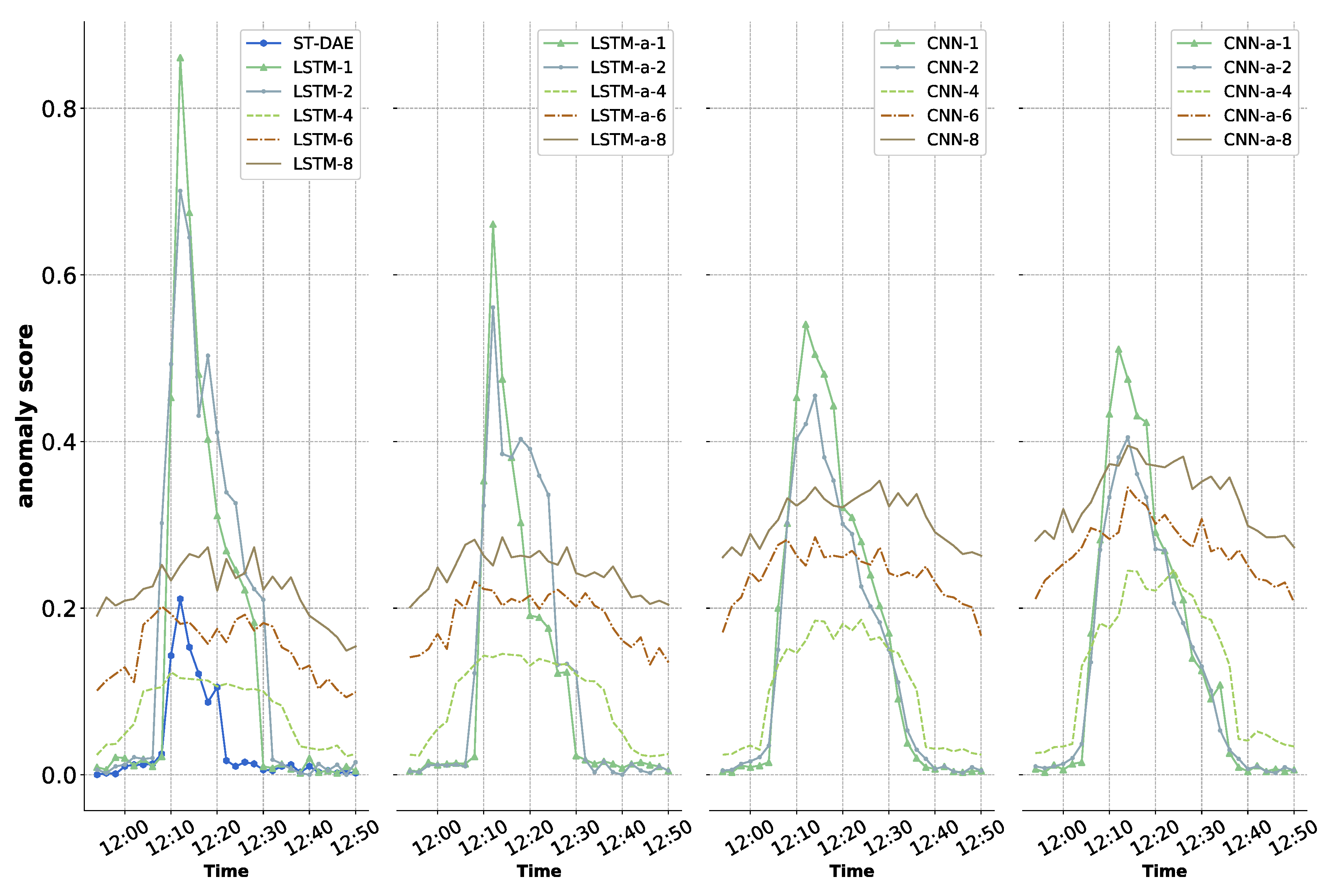
4.4.2. Evaluation on Time-Dependent Anomalies Detection Capability
4.4.3. Evaluation on High-Level Features Quality
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jin, W.; Sun, B.; Li, Z.; Zhang, S.; Chen, Z. Detecting anomalies of satellite power subsystem via stage-training denoising autoencoders. Sensors 2019, 19, 3216. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Suo, M.; Tao, L.; Zhu, B. Soft decision-making based on decision-theoretic rough set and Takagi-Sugeno fuzzy model with application to the autonomous fault diagnosis of satellite power system. Aerosp. Sci. Technol. 2020, 106, 106108. [Google Scholar] [CrossRef]
- Andrienko, N. Exploratory Analysis of Spatial and Temporal Data; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Azevedo, D.R.; Ambrósio, A.M.; Vieira, M. Applying data mining for detecting anomalies in satellites. In Proceedings of the 9th European Dependable Computing Conference, Sibiu, Romania, 8–11 May 2012; pp. 212–217. [Google Scholar]
- Gupta, M.; Jing, G.; Aggarwal, C. Outlier Detection for Temporal Data: A Survey. IEEE Trans. Knowl. Data Eng. 2014, 26, 2250–2267. [Google Scholar] [CrossRef]
- Fan, C.; Xiao, F.; Zhao, Y. Analytical investigation of autoencoder-based methods for unsupervised anomaly detection in building energy data. Appl. Eng. 2018, 211, 1123–1135. [Google Scholar] [CrossRef]
- Ahmed, M.; Mahmood, A.N.; Hu, J. A survey of network anomaly detection techniques. J. Netw. Comput. Appl. 2016, 60, 19–31. [Google Scholar] [CrossRef]
- Chandola, V.; Banerjee, A.; Kumar, V. Anomaly detection: A survey. ACM Comput. Surv. 2009, 41, 15. [Google Scholar] [CrossRef]
- Schölkopf, B.; Williamson, R.C.; Smola, A.J. Support vector method for novelty detection. NIPS 1999, 12, 582–588. [Google Scholar]
- Erfani, S.M.; Rajasegarar, S.; Karunasekera, S. High-dimensional and large-scale anomaly detection using a linear one-class SVM with deep learning. Pattern Recognit. 2016, 58, 121–134. [Google Scholar] [CrossRef]
- Yi, Y.; Wu, J.; Xu, W. Incremental SVM based on reserved set for network intrusion detection. Expert Syst. Appl. 2011, 38, 7698–7707. [Google Scholar] [CrossRef]
- Aliakbarisani, R.; Ghasemi, A.; Wu, S.F. A data-driven metric learning-based scheme for unsupervised network anomaly detection. Comput. Electr. Eng. 2019, 73, 71–83. [Google Scholar] [CrossRef]
- Dong, H.; Jin, X.; Lou, Y. Lithium-ion battery state of health monitoring and remaining useful life prediction based on support vector regression-particle filter. J. Power Source 2014, 271, 114–123. [Google Scholar] [CrossRef]
- Patil, M.A.; Tagade, P.; Hariharan, K.S. A novel multistage Support Vector Machine based approach for Li ion battery remaining useful life estimation. Appl. Eng. 2015, 159, 285–297. [Google Scholar] [CrossRef]
- Suo, M.; Zhu, B.; An, R. Data-driven fault diagnosis of satellite power system using fuzzy Bayes risk and SVM. Aerosp. Sci. Technol. 2019, 84, 1092–1105. [Google Scholar] [CrossRef]
- Lee, B.; Wang, X. Fault detection and reconstruction for micro-satellite power subsystem based on PCA. In Proceedings of the 3rd International Symposium on Systems and Control in Aeronautics and Astronautics, Harbin, China, 8–10 June 2010; pp. 1169–1173. [Google Scholar]
- Hong, D.; Zhao, D.; Zhang, Y. The entropy and PCA based anomaly prediction in data streams. Procedia Comput. Sci. 2016, 96, 139–146. [Google Scholar] [CrossRef] [Green Version]
- Pan, D.; Liu, D.; Zhou, J. Anomaly detection for satellite power subsystem with associated rules based on kernel principal component analysis. Microelectron. Reliab. 2015, 55, 2082–2086. [Google Scholar] [CrossRef]
- Olukanmi, P.O.; Twala, B. Sensitivity analysis of an outlier-aware k-means clustering algorithm. In Proceedings of the 2017 Pattern Recognition Association of South Africa and Robotics and Mechatronics (PRASA-RobMech), Bloemfontein, South Africa, 30 November–1 December 2017; pp. 68–73. [Google Scholar]
- Gertler, J.J. Fault Detection and Diagnosis in Engineering Systems; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Syarif, I.; Prugel-Bennett, A.; Wills, G. Unsupervised clustering approach for network anomaly detection. In Proceedings of the International Conference on Networked Digital Technologies; Springer: Berlin/Heidelberg, Germany, 2012; pp. 135–145. [Google Scholar]
- Gao, B.; Ma, H.Y.; Yang, Y.H. HMMs (Hidden Markov models) based on anomaly intrusion detection method. In Proceedings of the International Conference on Machine Learning & Cybernetics, Beijing, China, 4–5 November 2002. [Google Scholar]
- Cabrera, J.B.D.; Lewis, L.; Mehra, R.K. Detection and classification of intrusions and faults using sequences of system calls. ACM SIGMOD Rec. 2001, 30, 25–34. [Google Scholar] [CrossRef] [Green Version]
- Endler, D. Intrusion detection. Applying machine learning to Solaris audit data. In Proceedings of the 14th Annual Computer Security Applications Conference, Phoenix, AZ, USA, 7–11 December 1998. [Google Scholar]
- Lane, T.; Brodley, C.E. An application of machine learning to anomaly detection. Trans. Inf. Forensics Secur. 1997, 2, 295–331. [Google Scholar] [CrossRef]
- Lane, T. Temporal sequence learning and data reduction for anomaly detection. ACM Trans. Inf. Syst. Secur. (TISSEC) 1999, 2, 295–331. [Google Scholar] [CrossRef]
- Keogh, E.; Lin, J.; Herle, L. Finding the most unusual time series subsequence: Algorithms and applications. Knowl. Inf. Syst. 2007, 11, 1–27. [Google Scholar] [CrossRef]
- Ackley, D.H.; Hinton, G.E.; Sejnowski, T.J. A learning algorithm for Boltzmann machines. Cognit. Sci. 1985, 9, 147–169. [Google Scholar] [CrossRef]
- Assendorp, J.P. Deep Learning for Anomaly Detection in Multivariate Time Series Data. Ph.D. Thesis, Hochschule für Angewandte Wissenschaften Hamburg, Hamburg, Germany, 2017. [Google Scholar]
- Baldi, P. Autoencoders, unsupervised learning, and deep architectures. In Proceedings of the of ICML Workshop on Unsupervised and Transfer Learning, JMLR Workshop and Conference Proceedings, Edinburgh, UK, 26 June–1 July 2012; pp. 37–49. [Google Scholar]
- Malhotra, P.; Ramakrishnan, A.; Anand, G. LSTM-based encoder-decoder for multi-sensor anomaly detection. arXiv 2016, arXiv:1607.00148. [Google Scholar]
- Sutskever, I.; Vinyals, O.; Le, Q.V. Sequence to Sequence Learning with Neural Networks. In Proceedings of the Advances in Neural Information Processing Systems (NIPS), Montreal, QC, Canada, 8–13 December 2014; pp. 3104–3112. [Google Scholar]
- Mousavi, S.; Afghah, F. Inter-and intra-patient ecg heartbeat classification for arrhythmia detection: A sequence to sequence deep learning approach. In Proceedings of the ICASSP 2019—2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019. [Google Scholar]
- Jiang, K.; Liang, S.; Meng, L. A Two-level attention-based sequence-to-sequence model for accurate inter-patient arrhythmia detection. In Proceedings of the 2020 IEEE International Conference on Bioinformatics and Biomedicine (BIBM), Seoul, Korea, 6–19 December 2020. [Google Scholar]
- Cho, K.; Van Merriënboer, B.; Gulcehre, C. Learning phrase representations using RNN encoder-decoder for statistical machine translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Chung, J.; Gulcehre, C.; Cho, K.H. Empirical evaluation of gated recurrent neural networks on sequence modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Bahdanau, D.; Cho, K.; Bengio, Y. Neural machine translation by jointly learning to align and translate. arXiv 2014, arXiv:1409.0473. [Google Scholar]
- Mnih, V.; Heess, N.; Graves, A. Recurrent models of visual attention. Adv. Neural Inf. Process. Syst. 2014, 27, 2204–2212. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N. Attention is all you need. arXiv 2017, arXiv:1706.03762. [Google Scholar]
- Luong, M.T.; Pham, H.; Manning, C.D. Effective approaches to attention-based neural machine translation. arXiv 2015, arXiv:1508.04025. [Google Scholar]
- Gehring, J.; Auli, M.; Grangier, D. Convolutional sequence to sequence learning. In Proceedings of the International Conference on Machine Learning, Sydney, NSW, Australia, 6–11 August 2017; pp. 1243–1252. [Google Scholar]
- Valant, C.J.; Wheaton, J.D.; Thurston, M.G. Evaluation of 1D CNN autoencoders for lithium-ion battery condition assessment using synthetic data. Proc. Annu. Conf. PHM Soc. 2019, 11, 1–11. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhao, H. A novel deep autoencoder feature learning method for rotating machinery fault diagnosis. Mech. Syst. Signal. 2017, 95, 187–204. [Google Scholar] [CrossRef]
- Su, Y.; Zhao, Y.; Sun, M. Detecting outlier machine instances through gaussian mixture variational autoencoder with one dimensional CNN. IEEE Trans. Comput. 2021. [Google Scholar] [CrossRef]
- Smith, S. Digital Signal Processing: A Practical Guide for Engineers and Scientist; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Fowlkes, E.B.; Mallows, C.L. A method for comparing two hierarchical clusterings. J. Am. Stat. Assoc. 1983, 78, 553–569. [Google Scholar] [CrossRef]
- Caliński, T.; Harabasz, J. A dendrite method for cluster analysis. Commun. Stat. Theory Methods 1974, 3, 1–27. [Google Scholar] [CrossRef]
- Rousseeuw, P.J. Silhouettes: A graphical aid to the interpretation and validation of cluster analysis. J. Comput. Appl. Math. 1987, 20, 53–65. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Seq2seq | Network Cell Type | Attention | N |
|---|---|---|---|
| LSTM-1 | LSTM | Without attention | 1 |
| LSTM-2 | LSTM | Without attention | 2 |
| LSTM-4 | LSTM | Without attention | 4 |
| LSTM-6 | LSTM | Without attention | 6 |
| LSTM-8 | LSTM | Without attention | 8 |
| LSTM-a-1 | LSTM | With attention | 1 |
| LSTM-a-2 | LSTM | With attention | 2 |
| LSTM-a-4 | LSTM | With attention | 4 |
| LSTM-a-6 | LSTM | With attention | 6 |
| LSTM-a-8 | LSTM | With attention | 8 |
| CNN-1 | CNN | Without attention | 1 |
| CNN-2 | CNN | Without attention | 2 |
| CNN-4 | CNN | Without attention | 4 |
| CNN-6 | CNN | Without attention | 6 |
| CNN-8 | CNN | Without attention | 8 |
| CNN-a-1 | CNN | With attention | 1 |
| CNN-a-2 | CNN | With attention | 2 |
| CNN-a-4 | CNN | With attention | 4 |
| CNN-a-6 | CNN | With attention | 6 |
| CNN-a-8 | CNN | With attention | 8 |
| Layer | Description | Size | |
|---|---|---|---|
| encoder | 1 | Input | 240 × 36 |
| 2 | lstm_1 | 240 × 18 | |
| 3 | lstm_2 | 240 × 9 | |
| 4 | lstm_3 | 240 × 2 | |
| decoder | 5 | lstm_4 | 240 × 2 |
| 6 | lstm_5 | 240 × 9 | |
| 7 | lstm_6 | 240 × 18 | |
| 8 | dense_1 | 240 × 36 |
| Layer | Description | Size | |
|---|---|---|---|
| encoder | 1 | Input | 240 × 36 |
| 2 | conv_1 | 240 × 36 | |
| 3 | maxpool_1 | 2 × 2 | |
| 4 | conv_2 | 120 × 18 | |
| 5 | maxpool_2 | 2 × 2 | |
| 6 | conv_3 | 60 × 2 | |
| decoder | 7 | conv_4 | 60 × 2 |
| 8 | uppool_1 | 2 × 2 | |
| 9 | conv_5 | 120 × 18 | |
| 10 | uppool_2 | 2 × 2 | |
| 11 | conv_6 | 240 × 36 |
| Seq2seq | False Alarms | Precision (%) | Recall (%) |
|---|---|---|---|
| ST-DAE [1] | 43 | 90.23 | 91.58 |
| LSTM-1 | 83 | 86.79 | 87.39 |
| LSTM-2 | 71 | 89.40 | 89.02 |
| LSTM-4 | 52 | 91.37 | 91.81 |
| LSTM-6 | 77 | 87.84 | 88.98 |
| LSTM-8 | 90 | 84.37 | 85.64 |
| LSTM-a-1 | 72 | 87.92 | 88.32 |
| LSTM-a-2 | 61 | 89.80 | 90.88 |
| LSTM-a-4 | 46 | 92.74 | 93.42 |
| LSTM-a-6 | 67 | 88.41 | 89.11 |
| LSTM-a-8 | 78 | 86.95 | 88.05 |
| CNN-1 | 55 | 89.78 | 91.48 |
| CNN-2 | 44 | 92.80 | 93.71 |
| CNN-4 | 26 | 94.45 | 95.95 |
| CNN-6 | 49 | 92.17 | 92.17 |
| CNN-8 | 59 | 88.69 | 90.03 |
| CNN-a-1 | 42 | 91.44 | 92.01 |
| CNN-a-2 | 36 | 93.08 | 94.63 |
| CNN-a-4 | 10 | 96.59 | 98.09 |
| CNN-a-6 | 37 | 92.87 | 93.72 |
| CNN-a-8 | 49 | 90.69 | 91.60 |
| Seq2seq | Error Clustering Samples | Silhouette Coefficient Score | Calinski-Harabasz Index |
|---|---|---|---|
| ST-DAE [1] | 77 | 0.8953 | 5362 |
| LSTM-1 | 112 | 0.7972 | 5065 |
| LSTM-2 | 95 | 0.8704 | 5732 |
| LSTM-4 | 85 | 0.9040 | 5904 |
| LSTM-6 | 103 | 0.8497 | 5647 |
| LSTM-8 | 125 | 0.7201 | 4893 |
| LSTM-a-1 | 104 | 0.8323 | 5251 |
| LSTM-a-2 | 97 | 0.9062 | 5923 |
| LSTM-a-4 | 76 | 0.9211 | 6201 |
| LSTM-a-6 | 94 | 0.8975 | 5854 |
| LSTM-a-8 | 115 | 0.7831 | 5034 |
| CNN-1 | 63 | 0.8834 | 5748 |
| CNN-2 | 48 | 0.9266 | 6343 |
| CNN-4 | 30 | 0.9451 | 7113 |
| CNN-6 | 50 | 0.9055 | 6042 |
| CNN-8 | 62 | 0.8609 | 5433 |
| CNN-a-1 | 53 | 0.9029 | 6128 |
| CNN-a-2 | 32 | 0.9336 | 6732 |
| CNN-a-4 | 16 | 0.9615 | 7537 |
| CNN-a-6 | 34 | 0.9305 | 6326 |
| CNN-a-8 | 56 | 0.8913 | 5735 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, W.; Zhang, S.; Sun, B.; Jin, P.; Li, Z. An Analytical Investigation of Anomaly Detection Methods Based on Sequence to Sequence Model in Satellite Power Subsystem. Sensors 2022, 22, 1819. https://doi.org/10.3390/s22051819
Jin W, Zhang S, Sun B, Jin P, Li Z. An Analytical Investigation of Anomaly Detection Methods Based on Sequence to Sequence Model in Satellite Power Subsystem. Sensors. 2022; 22(5):1819. https://doi.org/10.3390/s22051819
Chicago/Turabian StyleJin, Weihua, Shijie Zhang, Bo Sun, Pengli Jin, and Zhidong Li. 2022. "An Analytical Investigation of Anomaly Detection Methods Based on Sequence to Sequence Model in Satellite Power Subsystem" Sensors 22, no. 5: 1819. https://doi.org/10.3390/s22051819
APA StyleJin, W., Zhang, S., Sun, B., Jin, P., & Li, Z. (2022). An Analytical Investigation of Anomaly Detection Methods Based on Sequence to Sequence Model in Satellite Power Subsystem. Sensors, 22(5), 1819. https://doi.org/10.3390/s22051819