
Coordinated Multi-Robotic Vehicles Navigation and Control in Shop Floor Automation



Abstract
:1. Introduction
2. Vehicle Autonomous Navigation and Control
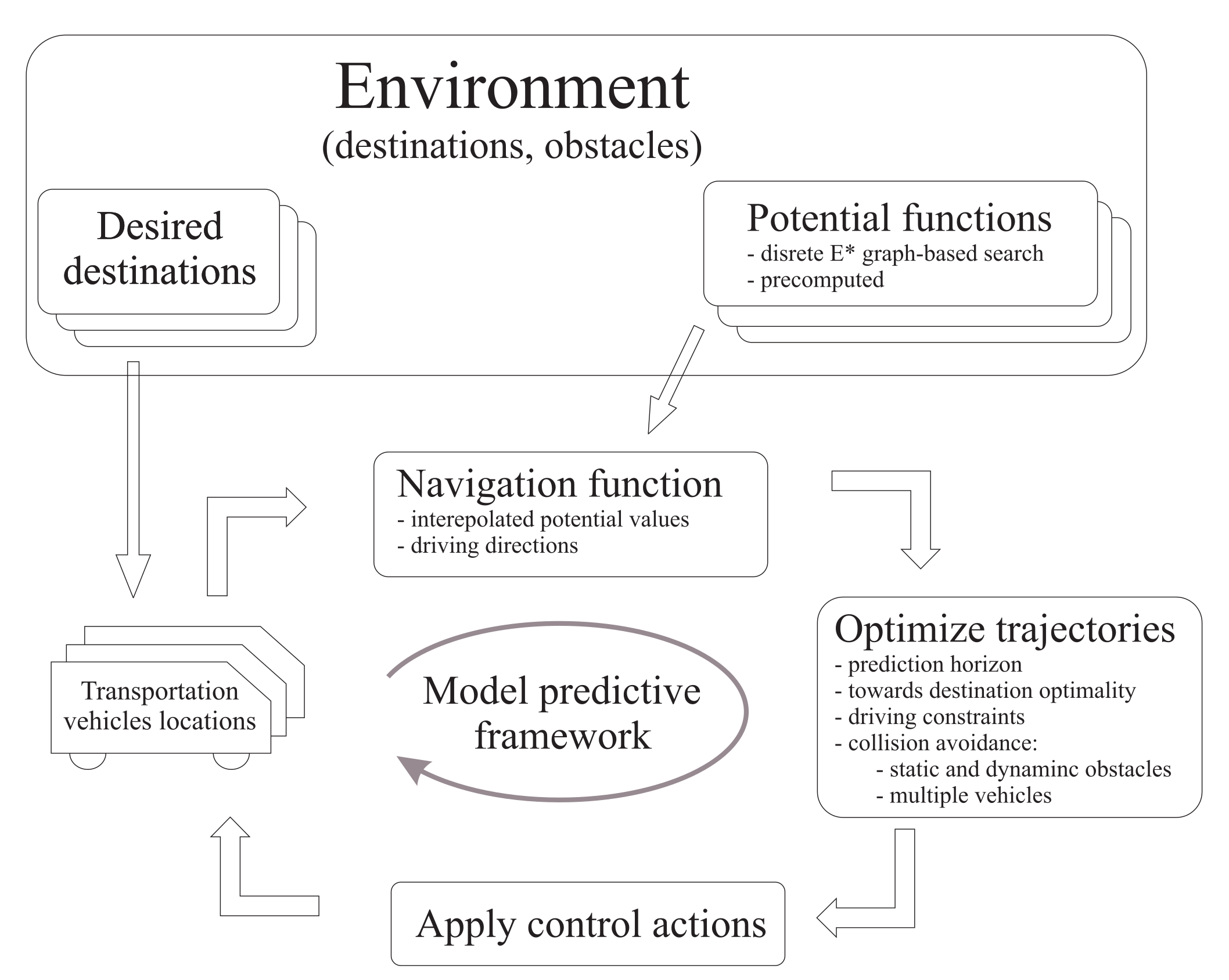
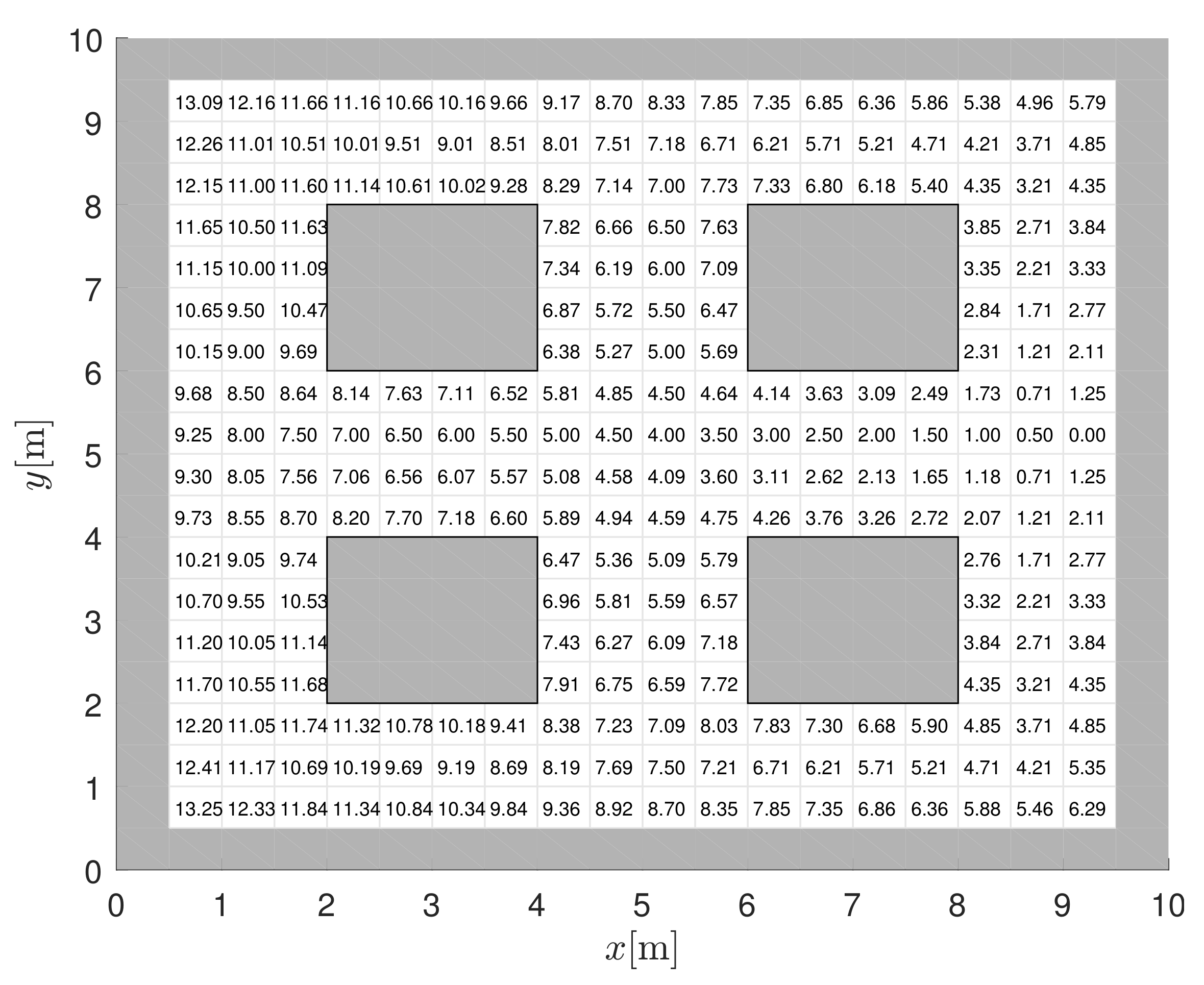
2.1. Concept of Navigation
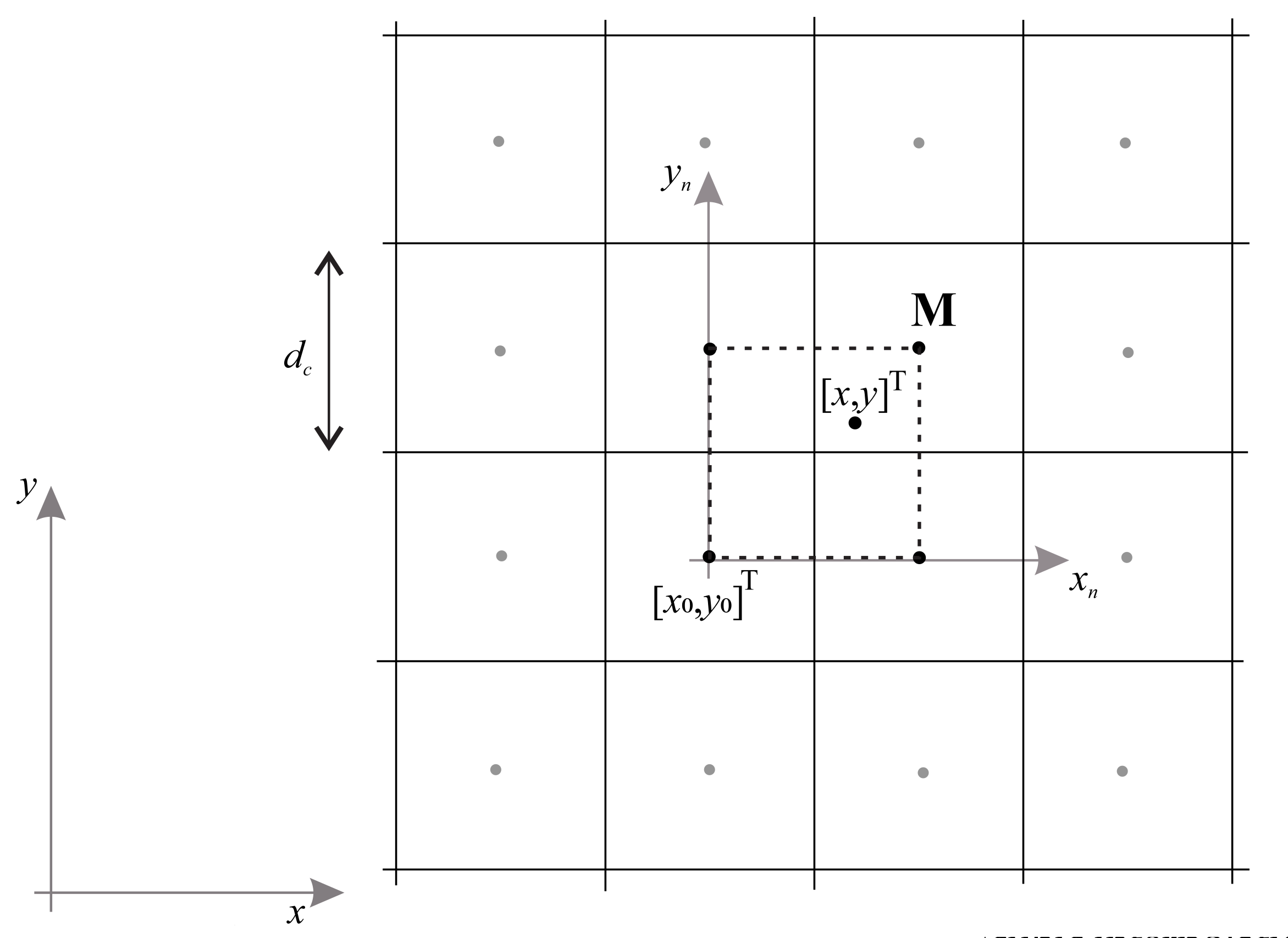
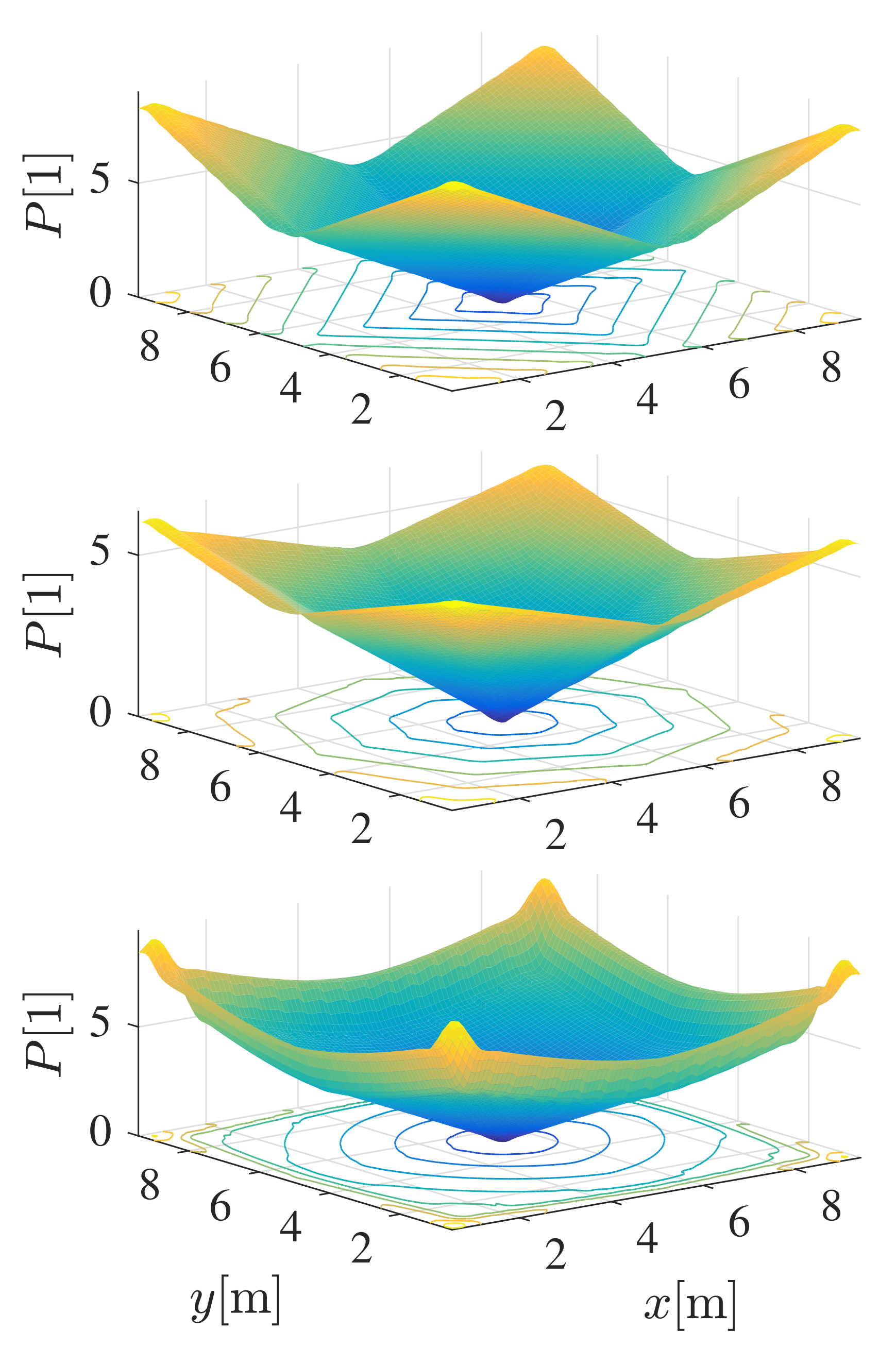
2.2. Bicubic Interpolation
3. Coordinated Model Predictive Control
3.1. Control Definition
3.1.1. Driving Constraints
3.1.2. Length of the Horizon
3.1.3. Convergent Behavior
3.1.4. Preventing Conflicts with Dynamic Obstacles
4. Optimisation Strategy in MPC Control
4.1. Fixed Candidate Optimization
4.2. Particle Swarm Optimization
4.3. Combined Deterministic-Stochastic Optimization
| Algorithm 1 Combined deterministic-stochastic optimization. |
| Require: List of particles where first are fixed particles. |
| for each particle do |
| Initialize by Equation (13). |
| end for |
| for each particle do |
| Randomly initialize , , . |
| end for |
| , |
| repeat |
| for each particle do |
| if | then |
| Compute objective by (4) considering ramp down (Equation (9) and add penalty for Equation (7), Equation (12) violation. |
| Set condition by Equation (11). |
| if then |
| end if |
| if & then |
| , |
| end if |
| end if |
| end for |
| for each particle do |
| Update and by Equation (14) constrained by Equation (7). |
| end for |
| until |
5. Simulation Results
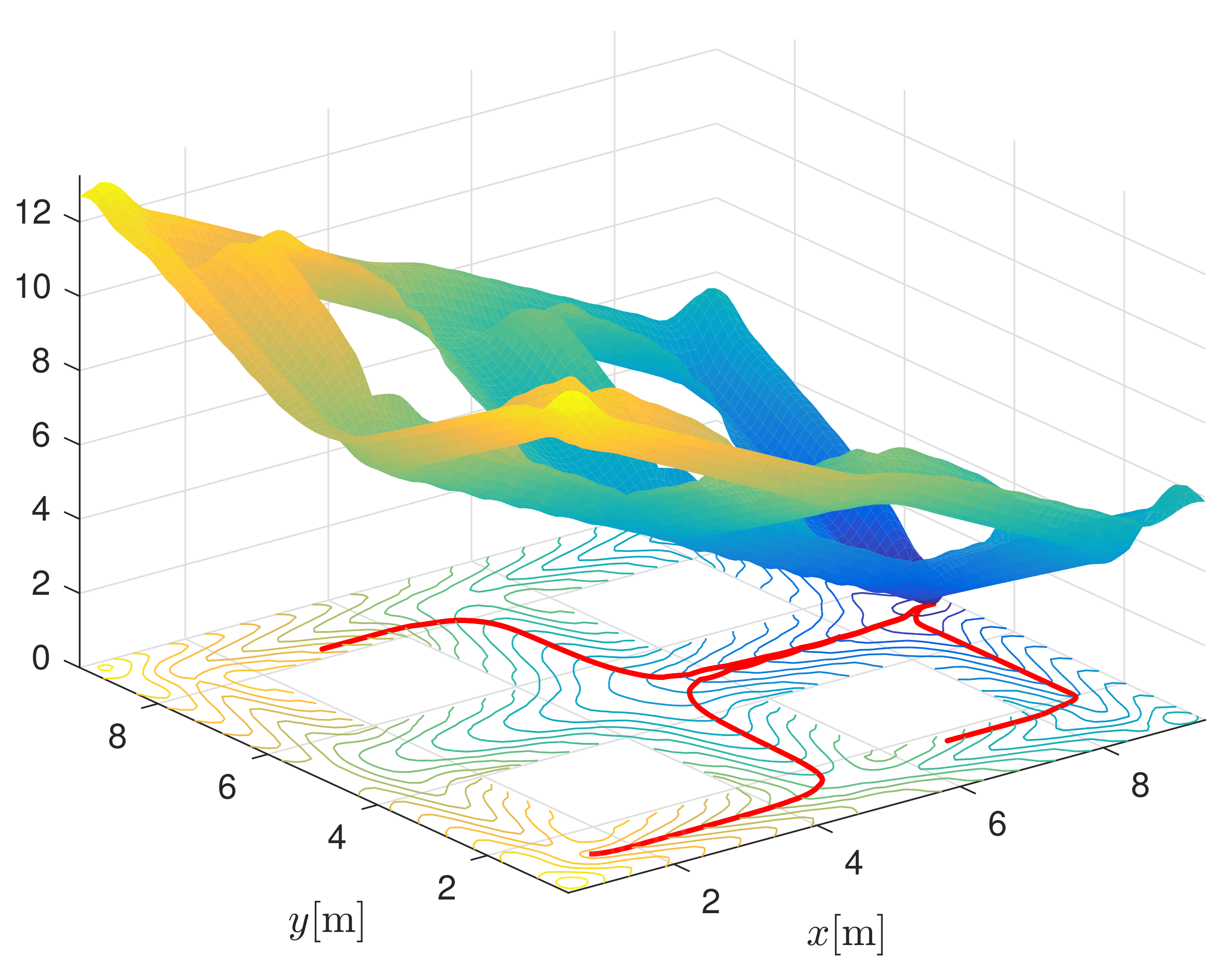
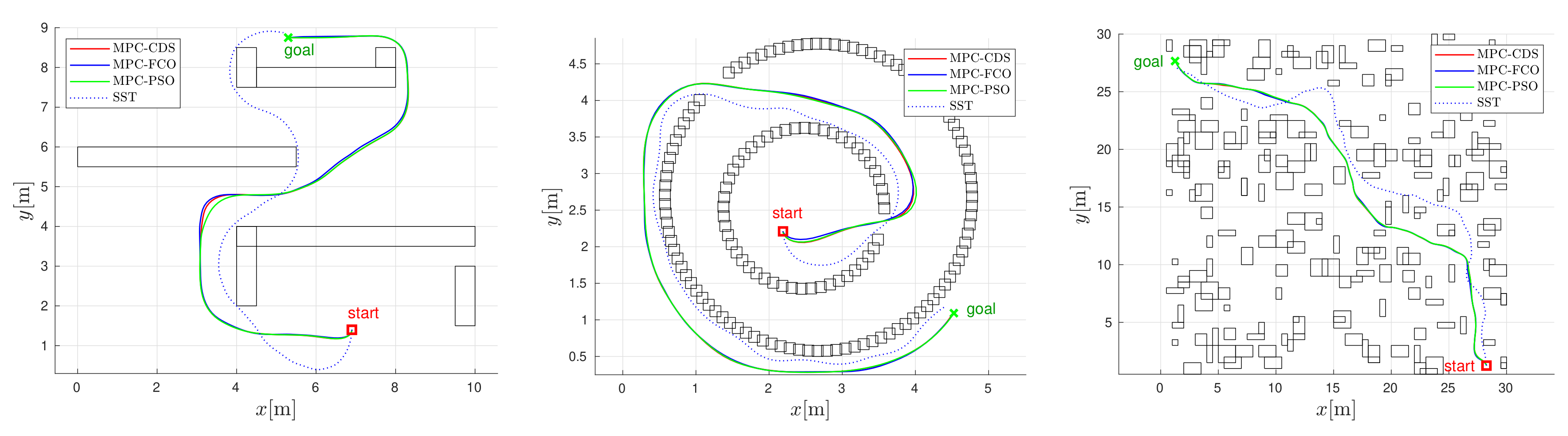
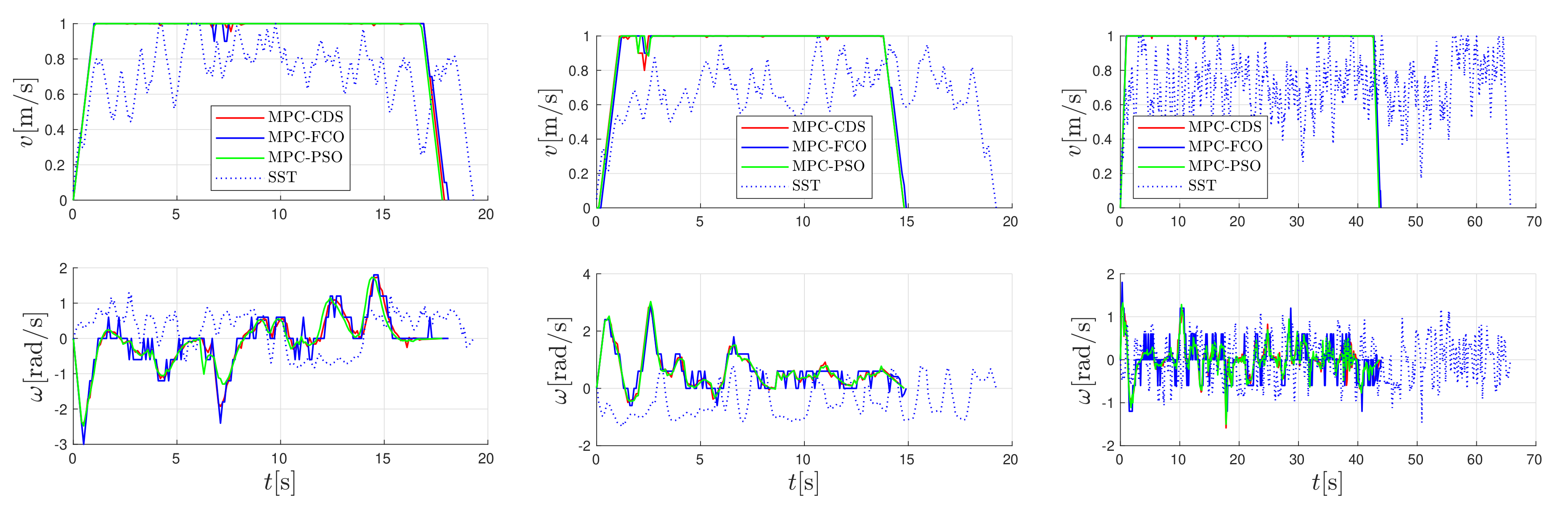
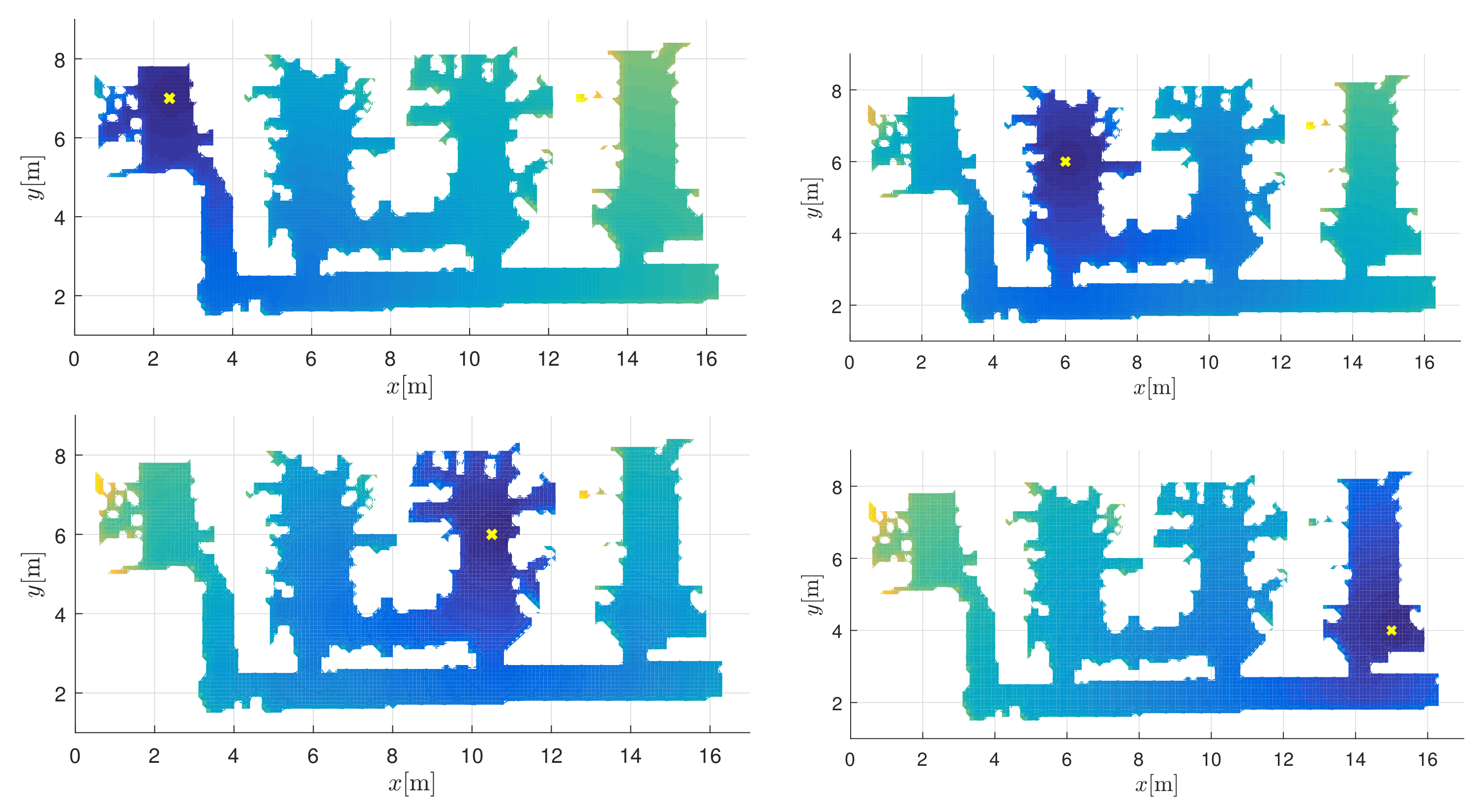
5.1. Single Robot Navigation
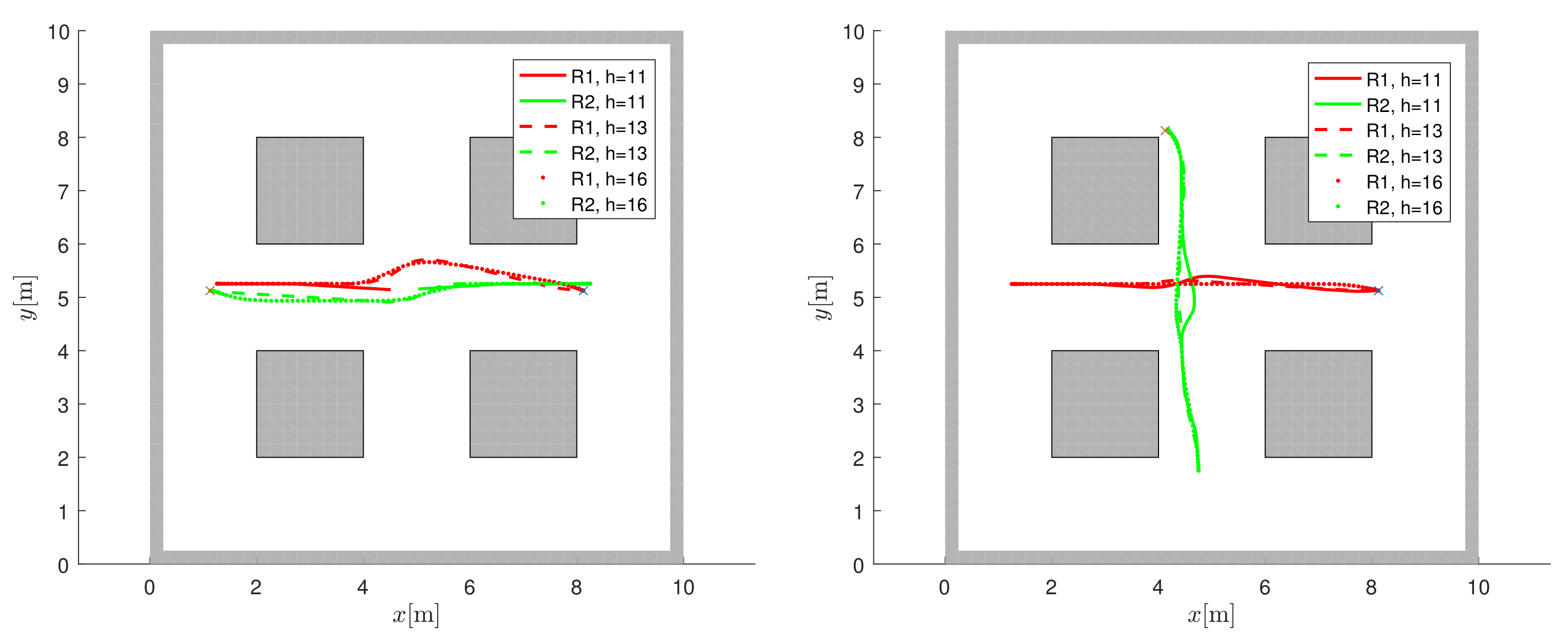
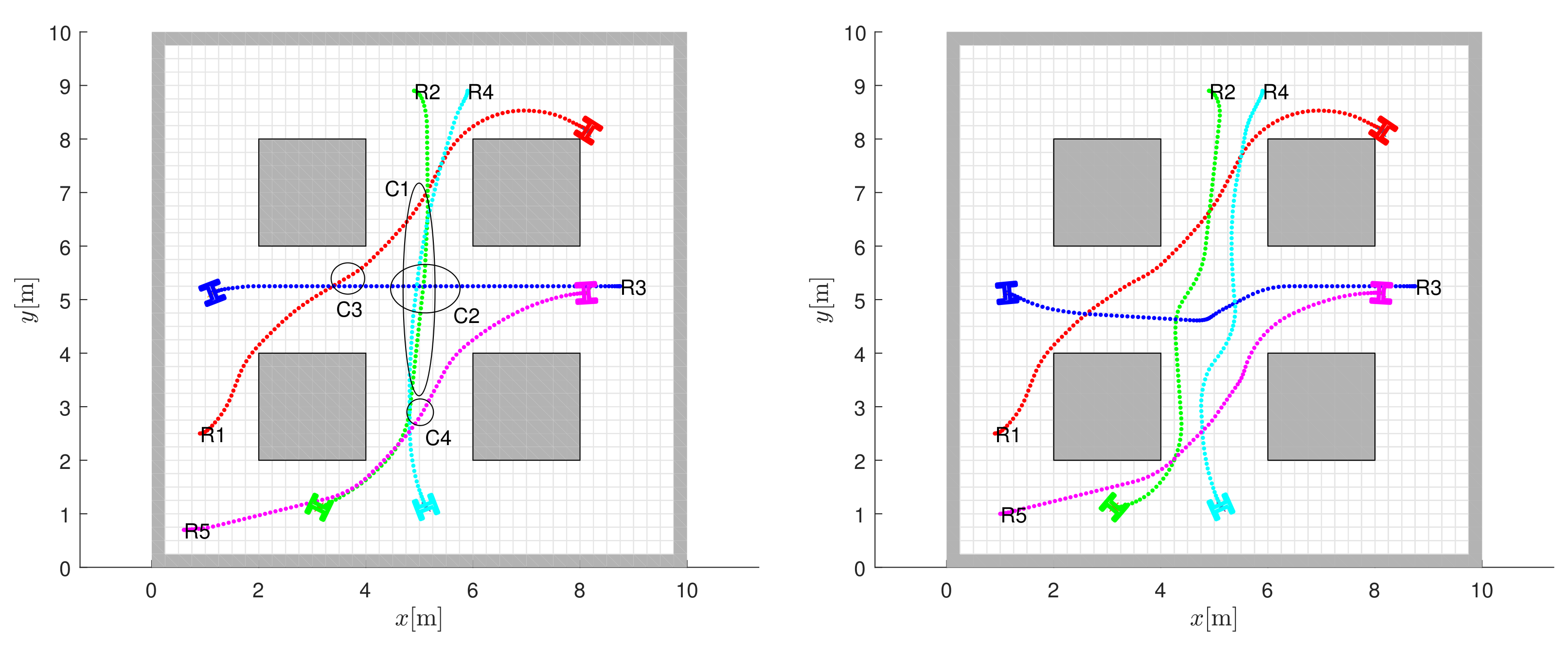
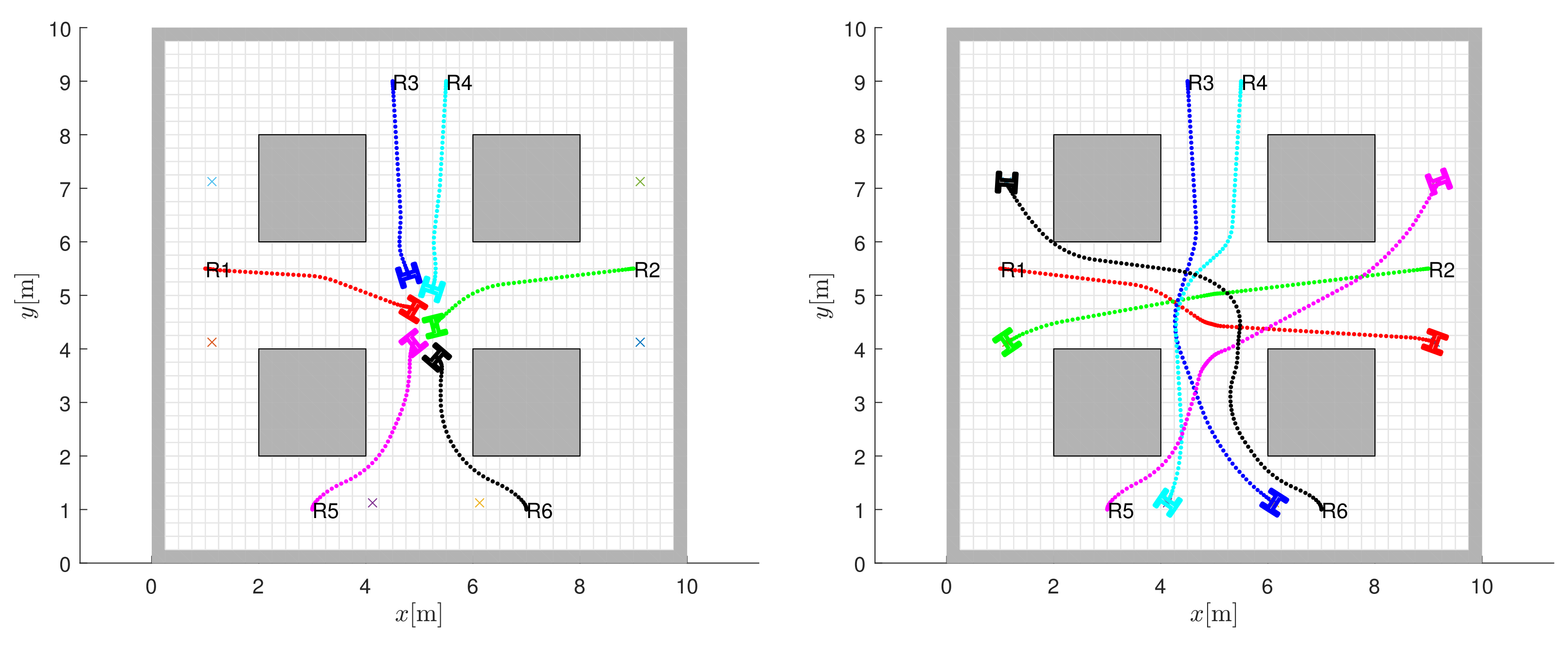
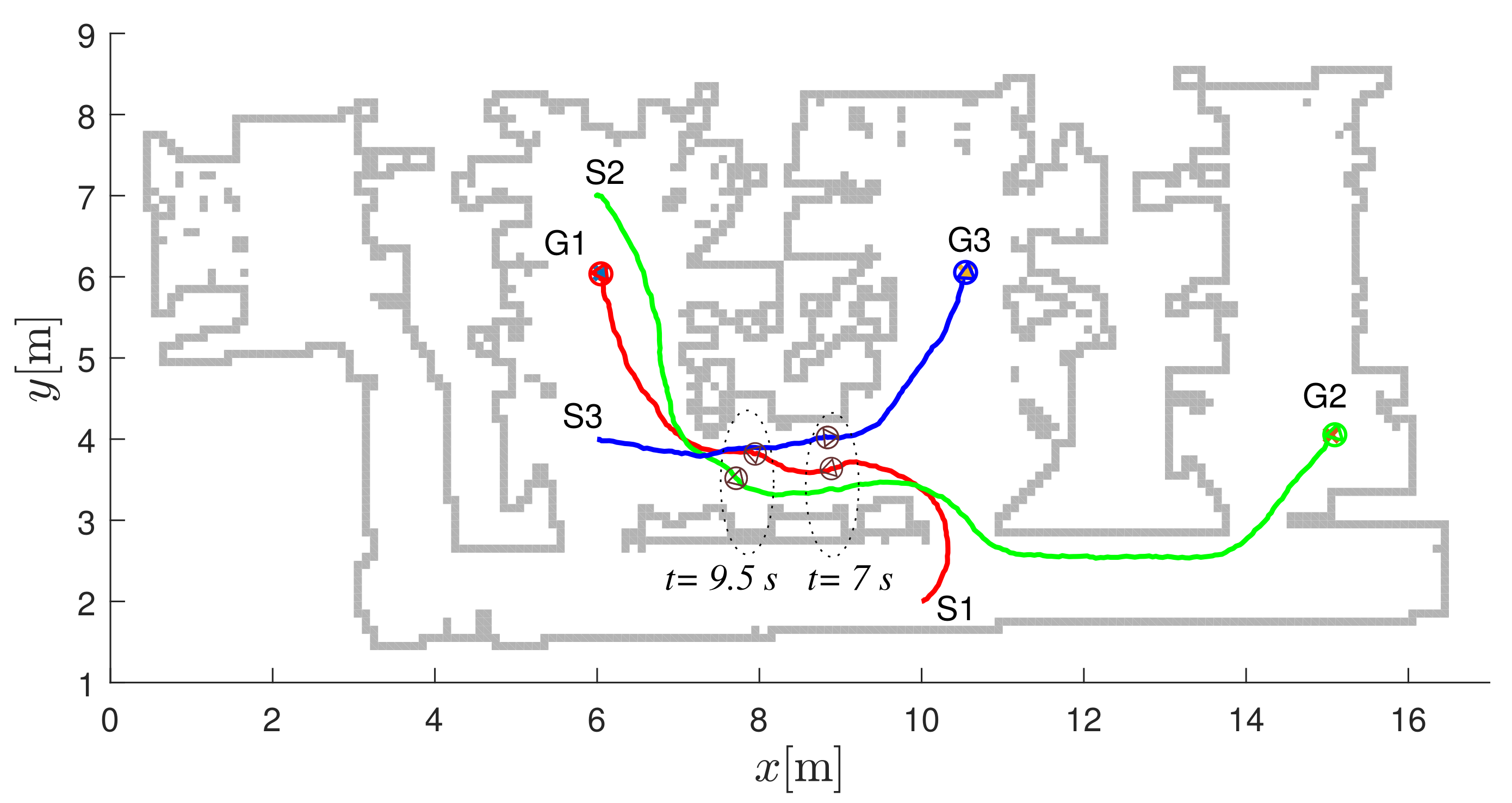
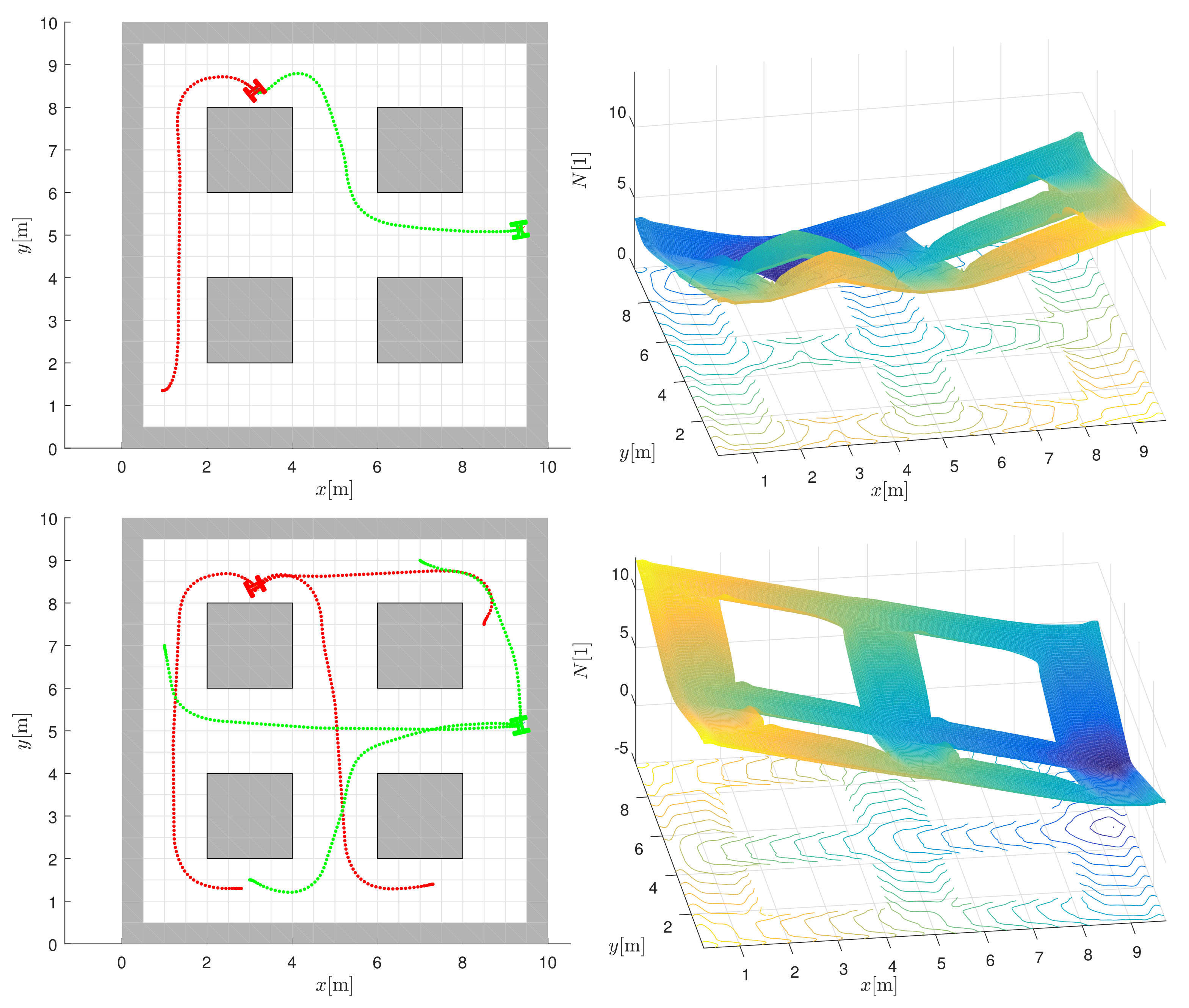
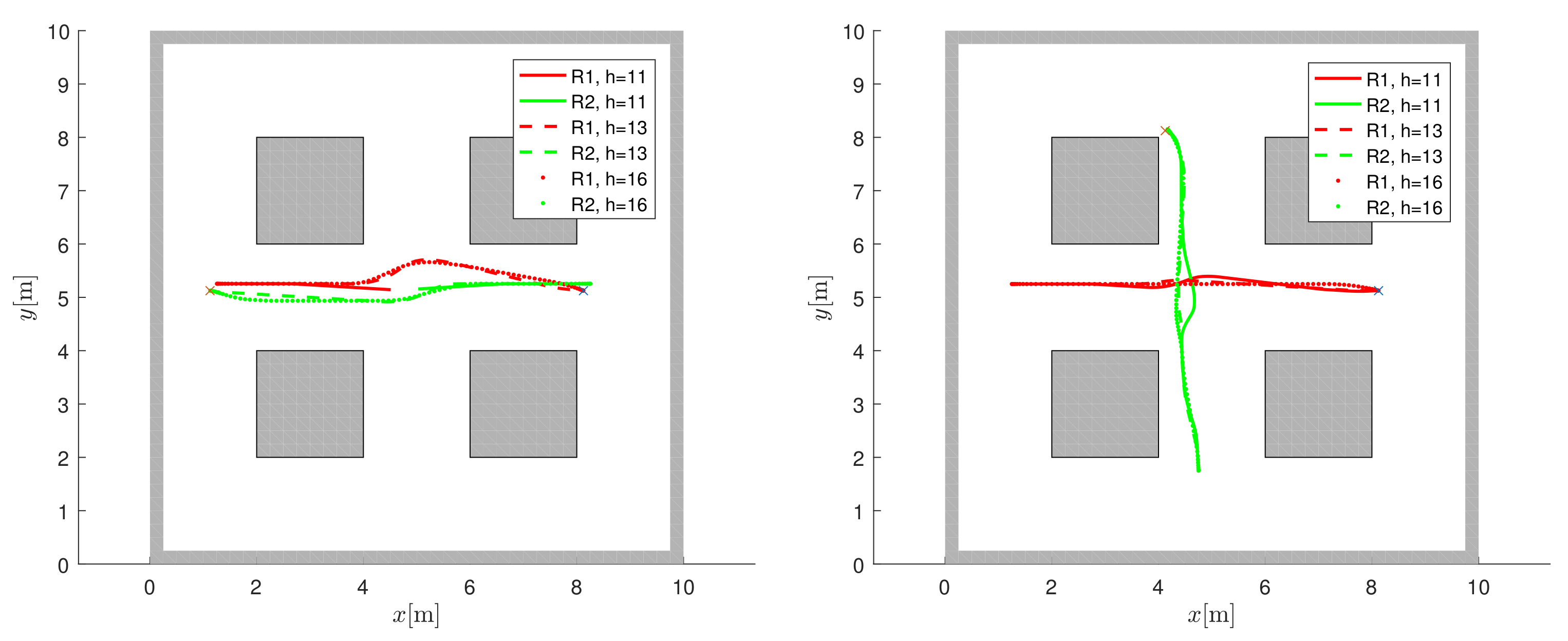
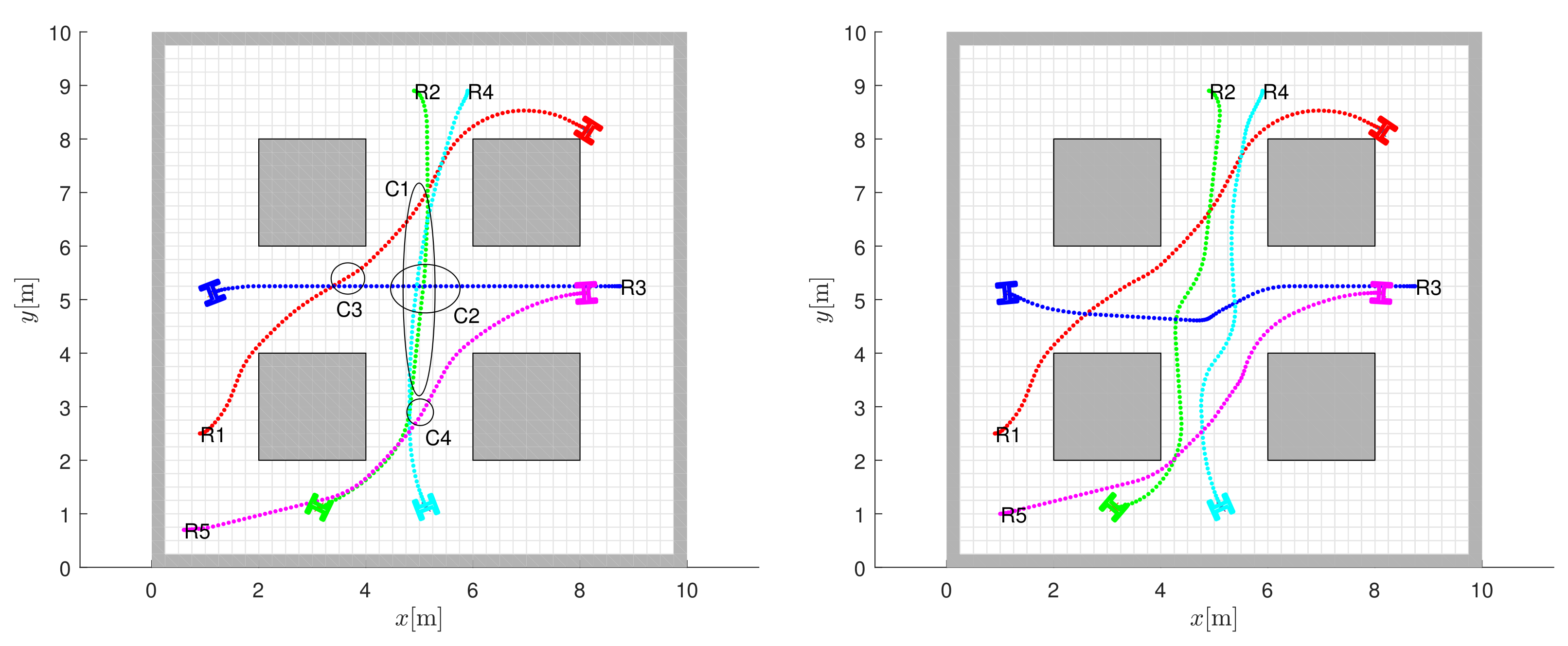
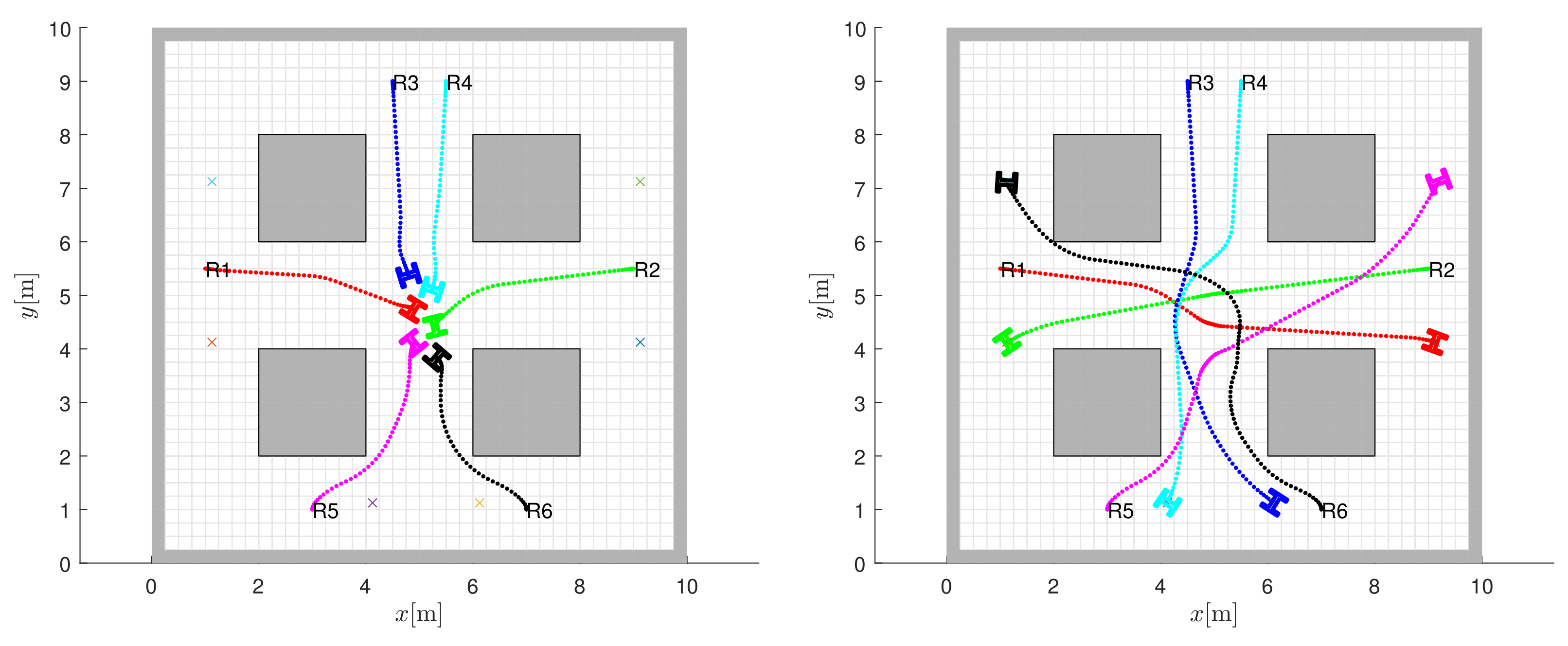
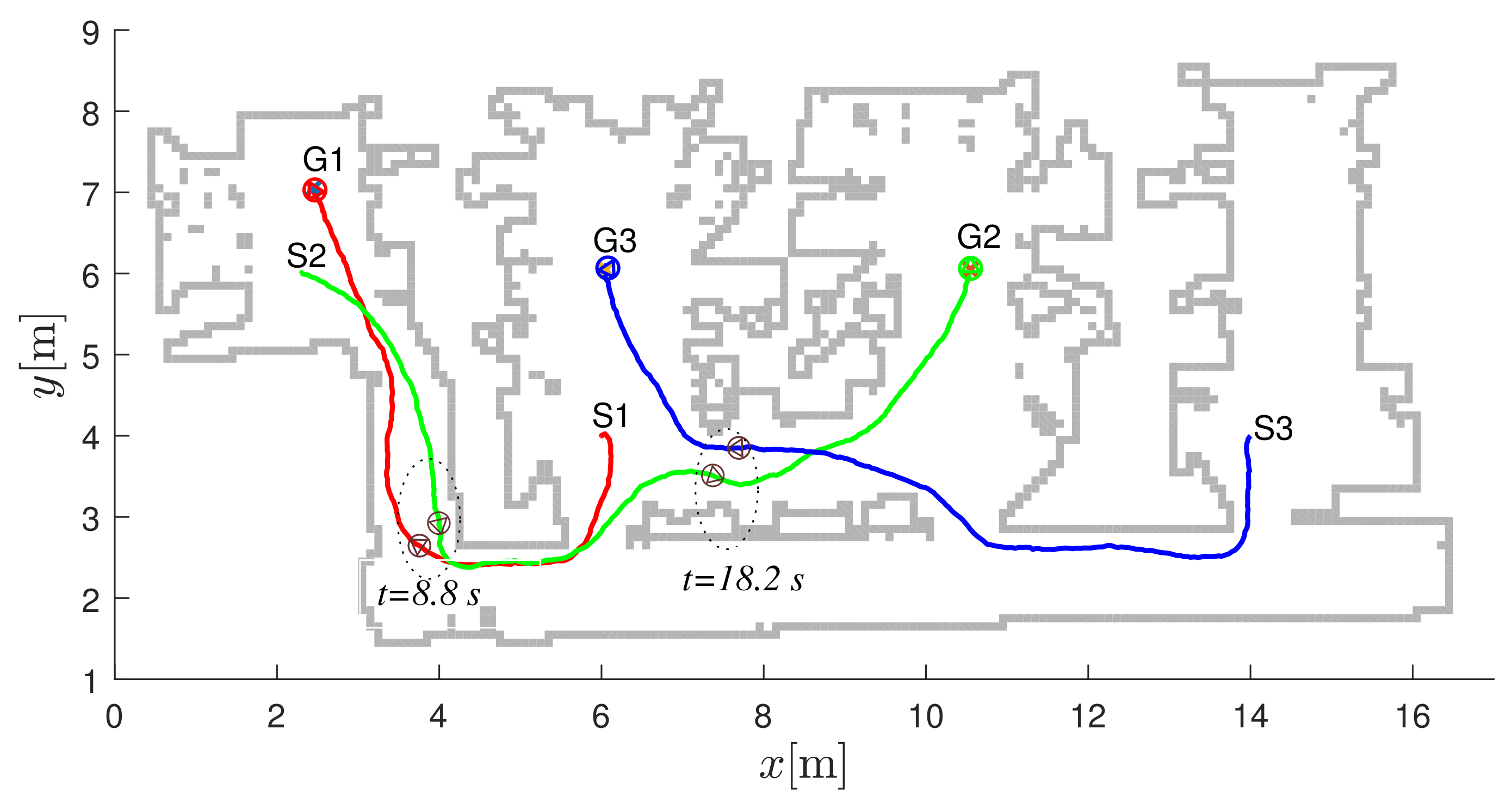
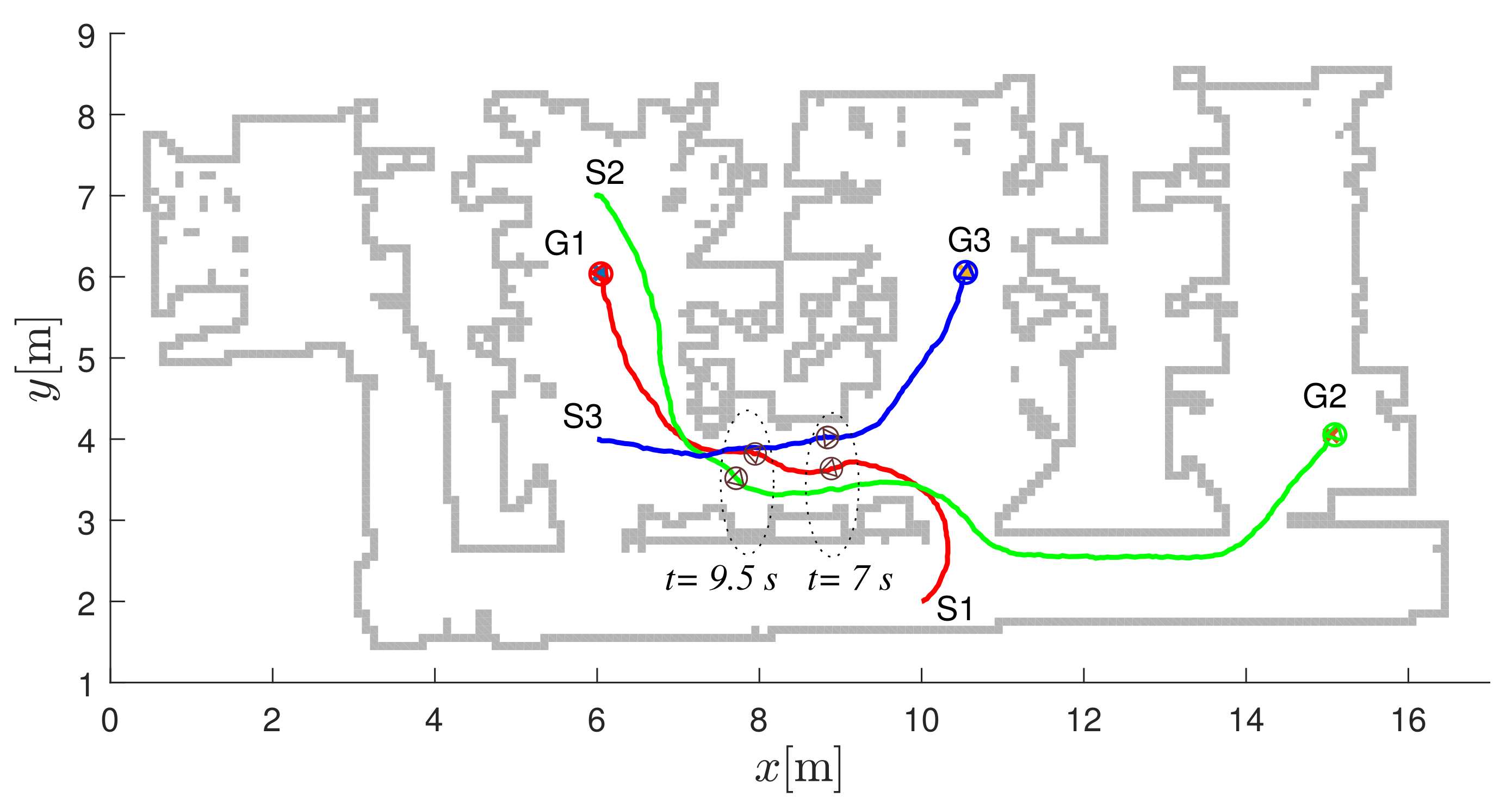
5.2. Multiple Robot Coordinated Navigation
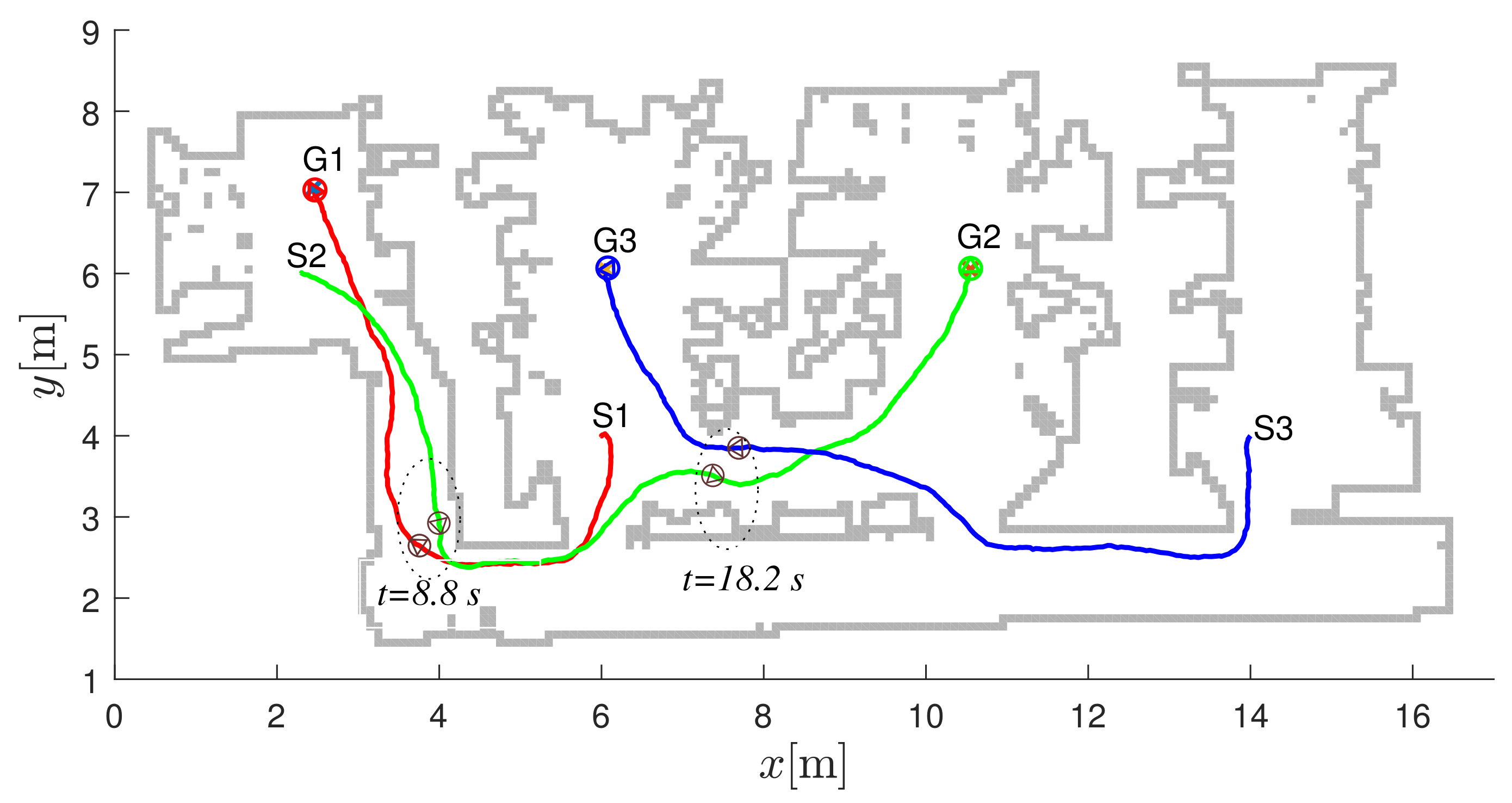
5.3. Experiments
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jahn, U.; Heß, D.; Stampa, M.; Sutorma, A.; Röhrig, C.; Schulz, P.; Wolff, C. A taxonomy for mobile robots: Types, applications, capabilities, implementations, requirements, and challenges. Robotics 2020, 9, 109. [Google Scholar] [CrossRef]
- Gonzalez-Aguirre, J.A.; Osorio-Oliveros, R.; Rodríguez-Hernández, K.L.; Lizárraga-Iturralde, J.; Morales Menendez, R.; Ramírez-Mendoza, R.A.; Ramírez-Moreno, M.A.; Lozoya-Santos, J.d.J. Service Robots: Trends and Technology. Appl. Sci. 2021, 11, 10702. [Google Scholar] [CrossRef]
- Oyekanlu, E.A.; Smith, A.C.; Thomas, W.P.; Mulroy, G.; Hitesh, D.; Ramsey, M.; Kuhn, D.J.; Mcghinnis, J.D.; Buonavita, S.C.; Looper, N.A.; et al. A review of recent advances in automated guided vehicle technologies: Integration challenges and research areas for 5g-based smart manufacturing applications. IEEE Access 2020, 8, 202312–202353. [Google Scholar] [CrossRef]
- Fragapane, G.; de Koster, R.; Sgarbossa, F.; Strandhagen, J.O. Planning and control of autonomous mobile robots for intralogistics: Literature review and research agenda. Eur. J. Oper. Res. 2021, 294, 405–426. [Google Scholar] [CrossRef]
- Wood, L. Global AGV (Automated Guided Vehicles) and AMR (Autonomous Mobile Robots) Market Forecast to 2026: Contains Analysis of More Than 500 Players. 2021. Available online: https://www.globenewswire.com/news-release/2021/01/13/2157658/0/en/Global-AGV-Automated-Guided-Vehicles-and-AMR-Autonomous-Mobile-Robots-Market-Forecast-to-2026-Contains-Analysis-of-More-Than-500-Players.html (accessed on 15 January 2022).
- Digani, V.; Sabattini, L.; Secchi, C.; Fantuzzi, C. Ensemble coordination approach in multi-agv systems applied to industrial warehouses. IEEE Trans. Autom. Sci. Eng. 2015, 12, 922–934. [Google Scholar] [CrossRef]
- Sharon, G.; Stern, R.; Felner, A.; Sturtevant, N.R. Conflict-based search for optimal multi-agent pathfinding. Artif. Intell. 2015, 219, 40–66. [Google Scholar] [CrossRef]
- Standley, T. Finding optimal solutions to cooperative pathfinding problems. In Proceedings of the AAAI Conference on Artificial Intelligence, Atlanta, GA, USA, 11–15 July 2010; Volume 24, pp. 173–178. [Google Scholar]
- Zhang, Z.; Guo, Q.; Chen, J.; Yuan, P. Collision-free route planning for multiple agvs in an automated warehouse based on collision classification. IEEE Access 2018, 6, 26022–26035. [Google Scholar] [CrossRef]
- Pallottino, L.; Scordio, V.G.; Bicchi, A.; Frazzoli, E. Decentralized cooperative policy for conflict resolution in multivehicle systems. Trans. Rob. 2007, 23, 1170–1183. [Google Scholar] [CrossRef]
- Stentz, A. Optimal and efficient path planning for partially-known environments. In Proceedings of the IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; pp. 3310–3317. [Google Scholar]
- Čikeš, M.; Đakulović, M.; Petrović, I. The path planning algorithms for a mobile robot based on the occupancy grid map of the environment – A comparative study. In Proceedings of the Information, Communication and Automation Technologies (ICAT), 2011 XXIII International Symposium on. IEEE, Sarajevo, Bosnia and Herzegovina, 27–29 October 2011; pp. 1–8. [Google Scholar]
- Zdešar, A.; Škrjanc, I. Optimum velocity profile of multiple bernstein-bézier curves subject to constraints for mobile robots. ACM Trans. Intell. Syst. Technol. 2018, 9, 1–23. [Google Scholar] [CrossRef]
- Klančar, G.; Seder, M.; Blažič, S.; Škrjanc, I.; Petrović, I. Drivable path planning using hybrid search algorithm based on e* and bernstein-bézier motion primitives. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 51, 4868–4882. [Google Scholar] [CrossRef]
- Gim, S.; Adouane, L.; Lee, S.; Dérutin, J.P. Clothoids composition method for smooth path generation of car-like vehicle navigation. J. Intell. Robot. Syst. Theory Appl. 2017, 88, 129–146. [Google Scholar] [CrossRef] [Green Version]
- Klančar, G.; Blažič, S. Optimal Constant Acceleration Motion Primitives. IEEE Trans. Veh. Technol. 2019, 68, 8502–8511. [Google Scholar] [CrossRef]
- Ghilardelli, F.; Gabriele, L.; Piazzi, A. Path generation using η4-splines for a truck and trailer vehicle. IEEE Trans. Autom. Sci. Eng. 2014, 11, 187–203. [Google Scholar] [CrossRef]
- Draganjac, I.; Miklić, D.; Kovačić, Z.; Vasiljević, G.; Bogdan, S. Decentralized control of multi-agv systems in autonomous warehousing applications. IEEE Trans. Autom. Sci. Eng. 2016, 13, 1433–1447. [Google Scholar] [CrossRef]
- Li, Y.; Littlefield, Z.; Bekris, K.E. Asymptotically optimal sampling-based kinodynamic planning. Int. J. Robot. Res. 2016, 35, 528–564. [Google Scholar] [CrossRef]
- Pivtoraiko, M.; Knepper, R.; Kelly, A. Differentially constrained mobile robot motion planning in state lattices. Robot. Auton. Syst. 2009, 26, 308–333. [Google Scholar] [CrossRef]
- Likhachev, M.; Ferguson, D. Planning long dynamically-feasible maneuvers for autonomous vehicles. Int. J. Robot. Res. 2009, 28, 933–945. [Google Scholar] [CrossRef] [Green Version]
- Montemerlo, M.; Becker, J.; Bhat, S.; Dahlkamp, H.; Dolgov, D.; Ettinger, S.; Hähnel, D.; Hilden, T.; Hoffmann, G.; Huhnke, B.; et al. Junior: The Stanford entry in the Urban Challenge. J. Field Robot. 2008, 25, 569–597. [Google Scholar] [CrossRef] [Green Version]
- Wooden, D.; Malchano, M.; Blankespoor, K.; Howardy, A.; Rizzi, A.A.; Raibert, M. Autonomous navigation for BigDog. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 4736–4741. [Google Scholar] [CrossRef]
- Bagnell, J.A.; Bradley, D.; Silver, D.; Sofman, B.; Stentz, A. Learning for autonomous navigation. IEEE Robot. Autom. Mag. 2010, 17, 74–84. [Google Scholar] [CrossRef]
- Philippsen, R.; Siegwart, R. An interpolated dynamic navigation function. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation (ICRA), Barcelona, Spain, 18–22 April 2005; Volume 4, pp. 3782–3789. [Google Scholar]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Path planning for autonomous vehicles in unknown semi-structured environments. Int. J. Robot. Res. 2010, 29, 485–501. [Google Scholar] [CrossRef]
- Lu, H.; Yin, Y. Fast path planning for autonomous ships in restricted waters. Appl. Sci. 2018, 8, 2592. [Google Scholar] [CrossRef] [Green Version]
- Cosio, F.A.; Castaneda, M.P. Autonomous robot navigation using adaptive potential fields. Math. Comput. Model. 2004, 40, 1141–1156. [Google Scholar] [CrossRef]
- Guerra, M.; Efimov, D.; Zheng, G.; Perruquetti, W. Avoiding local minima in the potential field method using input-to-state stability. Control. Eng. Pract. 2016, 55, 174–184. [Google Scholar] [CrossRef] [Green Version]
- Park, M.G.; Lee, M.C. A new technique to escape local minimum in artificial potential field based path planning. Ksme Int. J. 2003, 17, 1876–1885. [Google Scholar] [CrossRef]
- Ogren, P.; Leonard, N.E. A convergent dynamic window approach to obstacle avoidance. IEEE Trans. Robot. 2005, 21, 188–195. [Google Scholar] [CrossRef]
- Klančar, G.; Seder, M. Combined stochastic-deterministic predictive control using local-minima free navigation. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 25–29 October 2021; pp. 5788–5793. [Google Scholar] [CrossRef]
- Klančar, G.; Mušič, G.; Chen, H.; Seder, M. Wheeled robot navigation based on a unimodal potential function. In Proceedings of the 2019 International Conference on Computer, Information and Telecommunication Systems (CITS), Beijing, China, 28–30 August 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Borkowski, P. Computational mathematics in marine navigation. Sci. J. Marit. Univ. Szczecin, Zesz. Nauk. Akad. Morskiej Szczecinie 2010, 21, 20–27. [Google Scholar]
- Kiss, D.; Tevesz, G. A receding horizon control approach to obstacle avoidance. In Proceedings of the 2011 6th IEEE International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 19–21 May 2011; pp. 397–402. [Google Scholar]
- Seder, M.; Baotić, M.; Petrović, I. Receding horizon control for convergent navigation of a differential drive mobile robot. IEEE Trans. Control. Syst. Technol. 2017, 25, 653–660. [Google Scholar] [CrossRef]
- Demesure, G.; Defoort, M.; Bekrar, A.; Trentesaux, D.; Djemai, M. Decentralized motion planning and scheduling of AGVs in FMS. IEEE Trans. Ind. Informatics 2017, 14, 1744–1752. [Google Scholar] [CrossRef] [Green Version]
- Brito, B.; Floor, B.; Ferranti, L.; Alonso-Mora, J. Model predictive contouring control for collision avoidance in unstructured dynamic environments. IEEE Robot. Autom. Lett. 2019, 4, 4459–4466. [Google Scholar] [CrossRef]
- Seder, M.; Petrovic, I. Dynamic window based approach to mobile robot motion control in the presence of moving obstacles. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 1986–1991. [Google Scholar] [CrossRef]
- Keys, R. Cubic convolution interpolation for digital image processing. IEEE Trans. Acoust. Speech Signal Process. 1981, 29, 1153–1160. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Alg. | L [m] | [s] | [1] | [1] | |
|---|---|---|---|---|---|
| U map | MPC-CDS | 16.88 | 17.90 | 230.39 | 1.61 |
| MPC-FCO | 16.95 | 18.10 | 230.84 | 1.00 | |
| MPC-PSO | 16.79 | 17.80 | 228.68 | 13.11 | |
| SST | 13.82 | 19.18 | n/a | n/a | |
| Maze map | MPC-CDS | 13.63 | 14.80 | 111.30 | 1.73 |
| MPC-FCO | 13.64 | 14.90 | 111.66 | 1.00 | |
| MPC-PSO | 13.65 | 14.80 | 111.73 | 13.63 | |
| SST | 12.87 | 19.09 | n/a | n/a | |
| Rnd map | MPC-CDS | 42.69 | 43.70 | 1090.24 | 2.90 |
| MPC-FCO | 42.78 | 43.90 | 1092.28 | 1.00 | |
| MPC-PSO | 42.59 | 43.60 | 1091.18 | 28.01 | |
| SST | 46.07 | 65.59 | n/a | n/a |
| [m] | [s] | [1] | ||
|---|---|---|---|---|
| head-on | 11/11 | / | / | 1.00 |
| 16/11 | 14.27 | 16.40 | 1.46 | |
| 22/11 | 14.26 | 16.40 | 2.05 | |
| cross | 11/11 | 13.48 | 16.20 | 1.00 |
| 16/11 | 13.38 | 15.90 | 1.63 | |
| 22/11 | 13.33 | 15.80 | 2.27 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Klančar, G.; Seder, M. Coordinated Multi-Robotic Vehicles Navigation and Control in Shop Floor Automation. Sensors 2022, 22, 1455. https://doi.org/10.3390/s22041455
Klančar G, Seder M. Coordinated Multi-Robotic Vehicles Navigation and Control in Shop Floor Automation. Sensors. 2022; 22(4):1455. https://doi.org/10.3390/s22041455
Chicago/Turabian StyleKlančar, Gregor, and Marija Seder. 2022. "Coordinated Multi-Robotic Vehicles Navigation and Control in Shop Floor Automation" Sensors 22, no. 4: 1455. https://doi.org/10.3390/s22041455
APA StyleKlančar, G., & Seder, M. (2022). Coordinated Multi-Robotic Vehicles Navigation and Control in Shop Floor Automation. Sensors, 22(4), 1455. https://doi.org/10.3390/s22041455