
Passive Landmark Geometry Optimization and Evaluation for Reliable Autonomous Navigation in Mining Tunnels Using 2D Lidars

 , ,
, ,
Abstract
:1. Introduction
2. Related Work
3. Preliminary Notions of Localization by Scan Matching
4. Proposed Approach for Reliable Localization
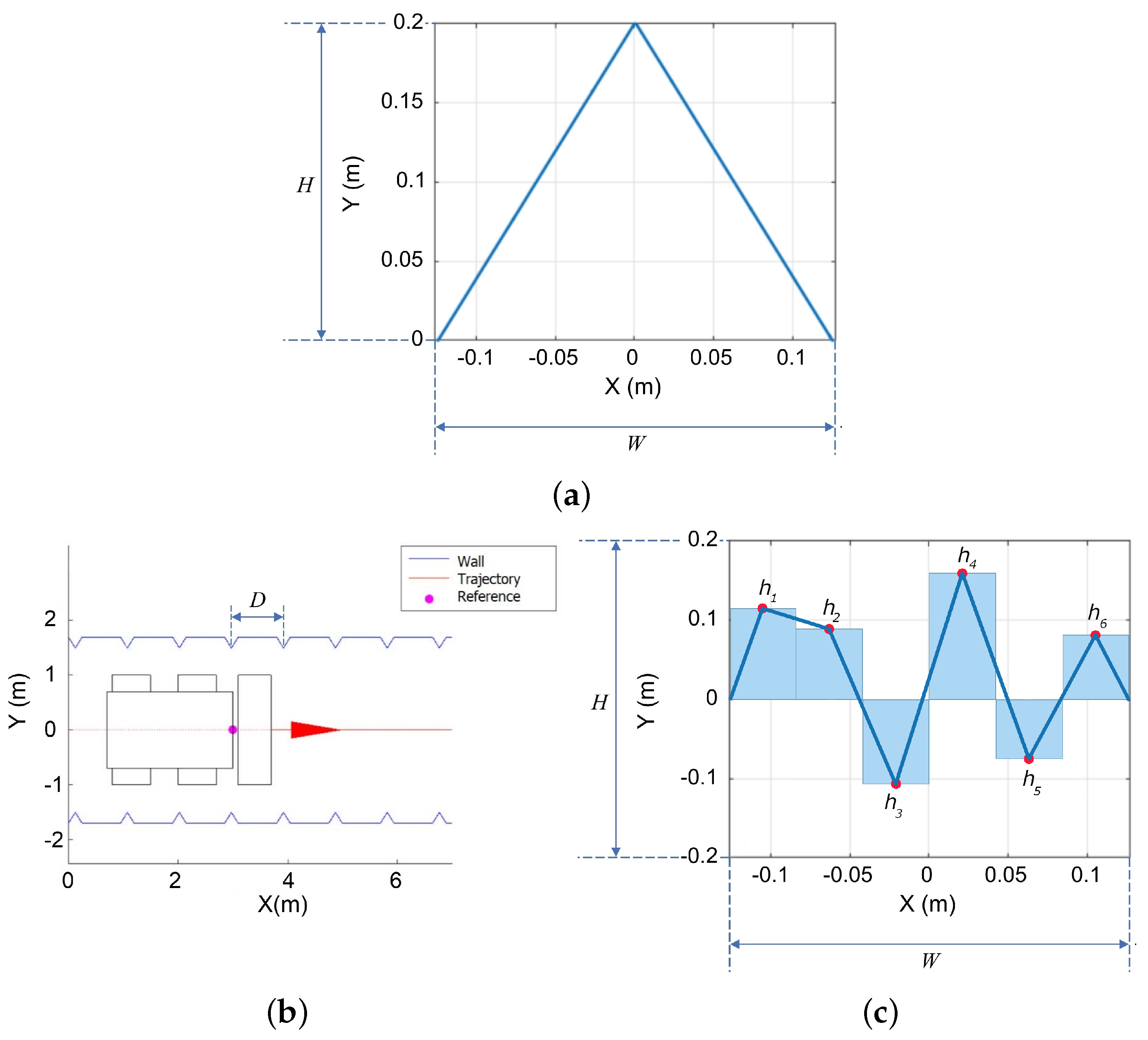
4.1. Landmark Parametrization
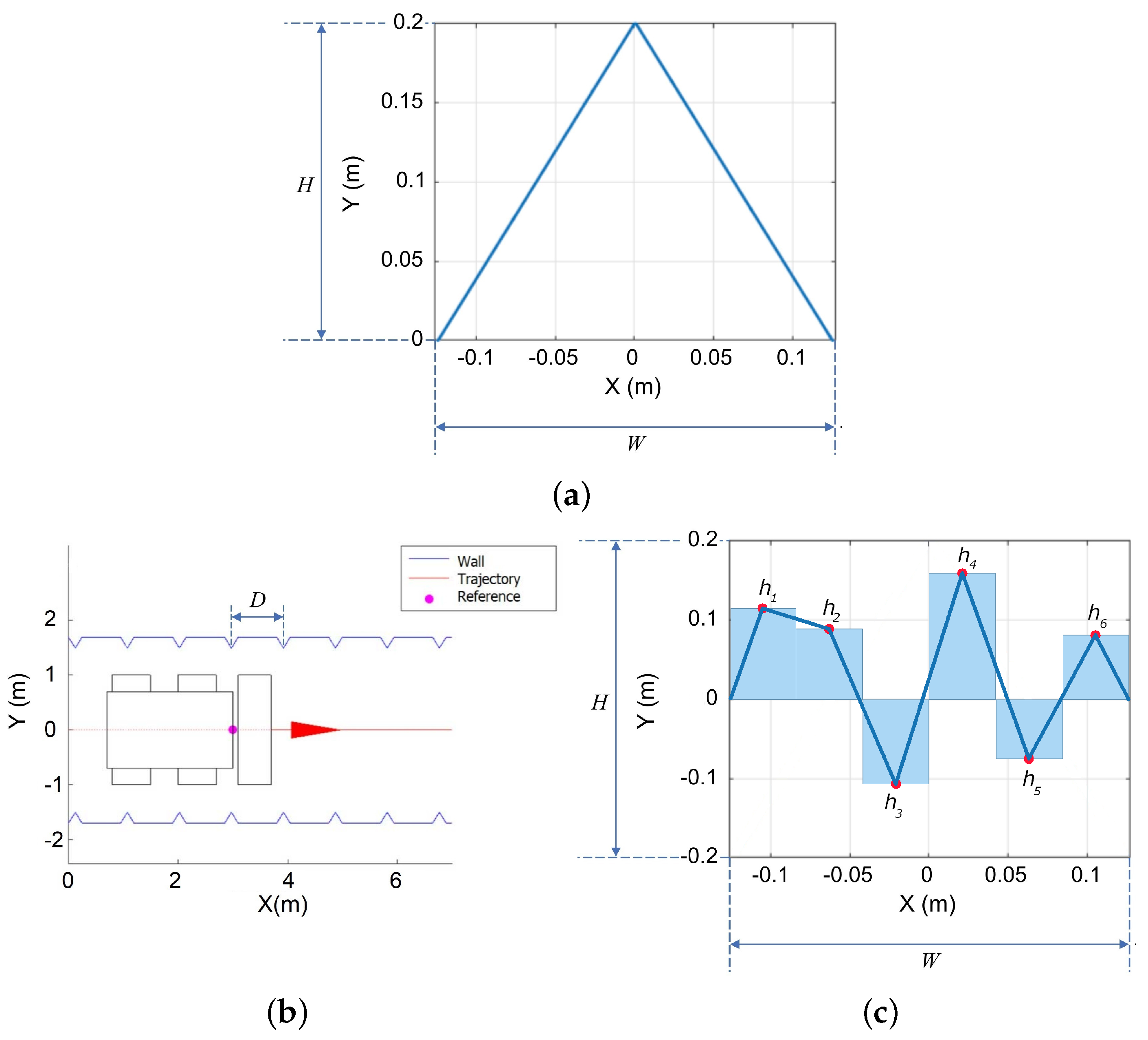
4.1.1. Landmarks Based on Shape Primitives
- Shape 1 (triangular): ;
- Shape 2 (rectangular): ;
- Shape 3 (parabolic): ;
- Shape 4 (linear):
4.1.2. Landmarks Based on Piecewise Linear Functions
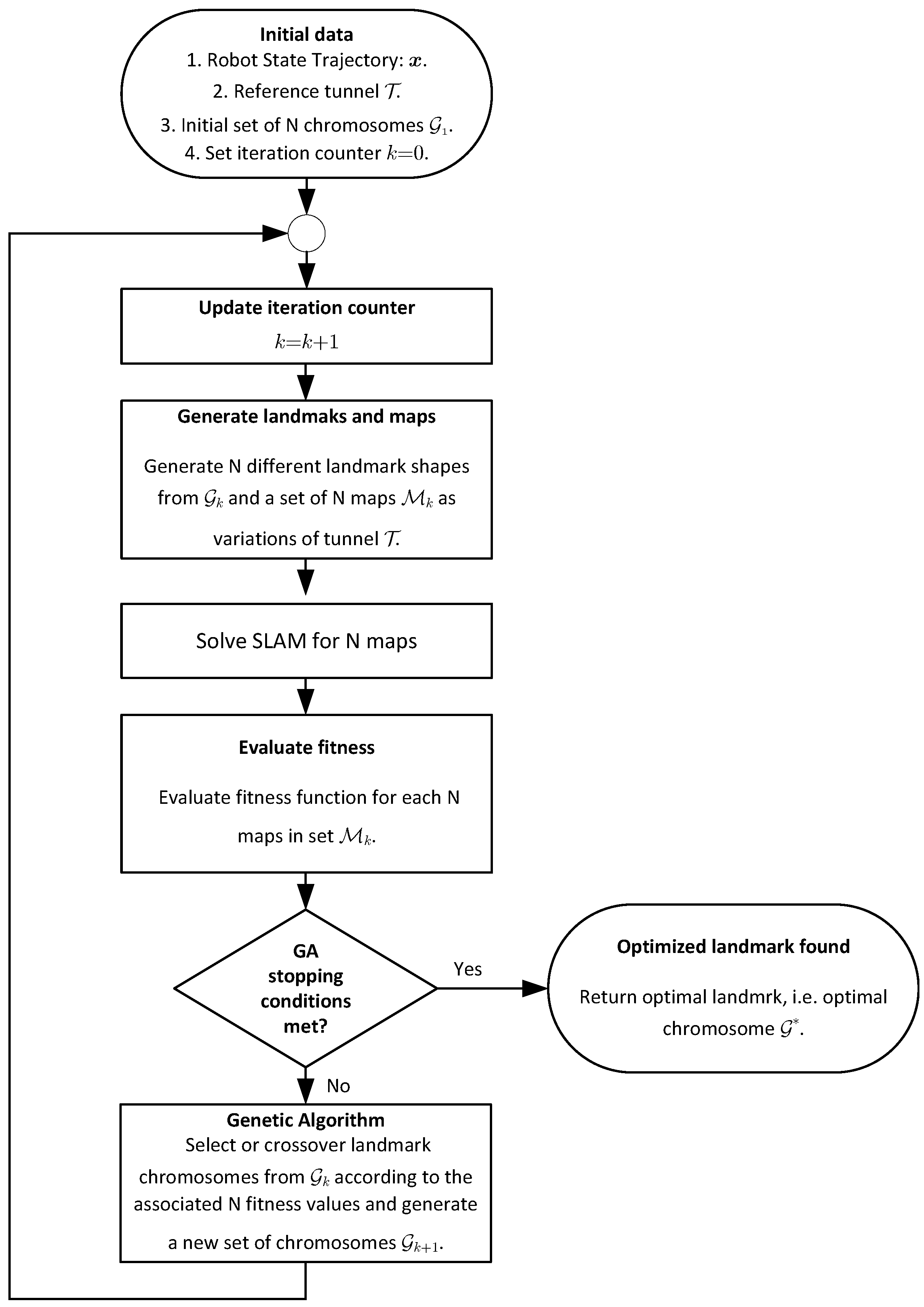
4.2. Genetic Algorithm Implementation
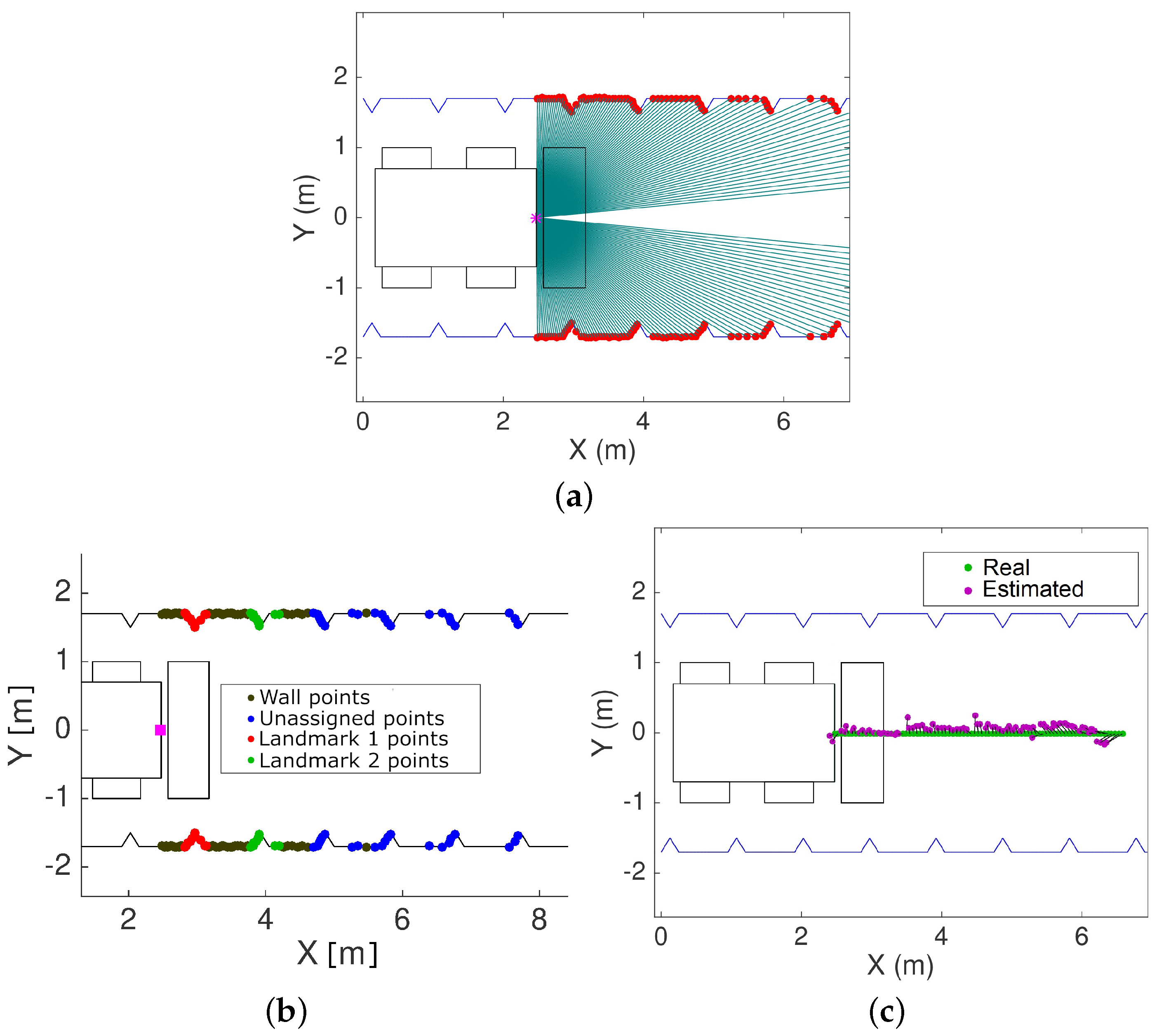
4.3. Simultaneous Localization and Mapping
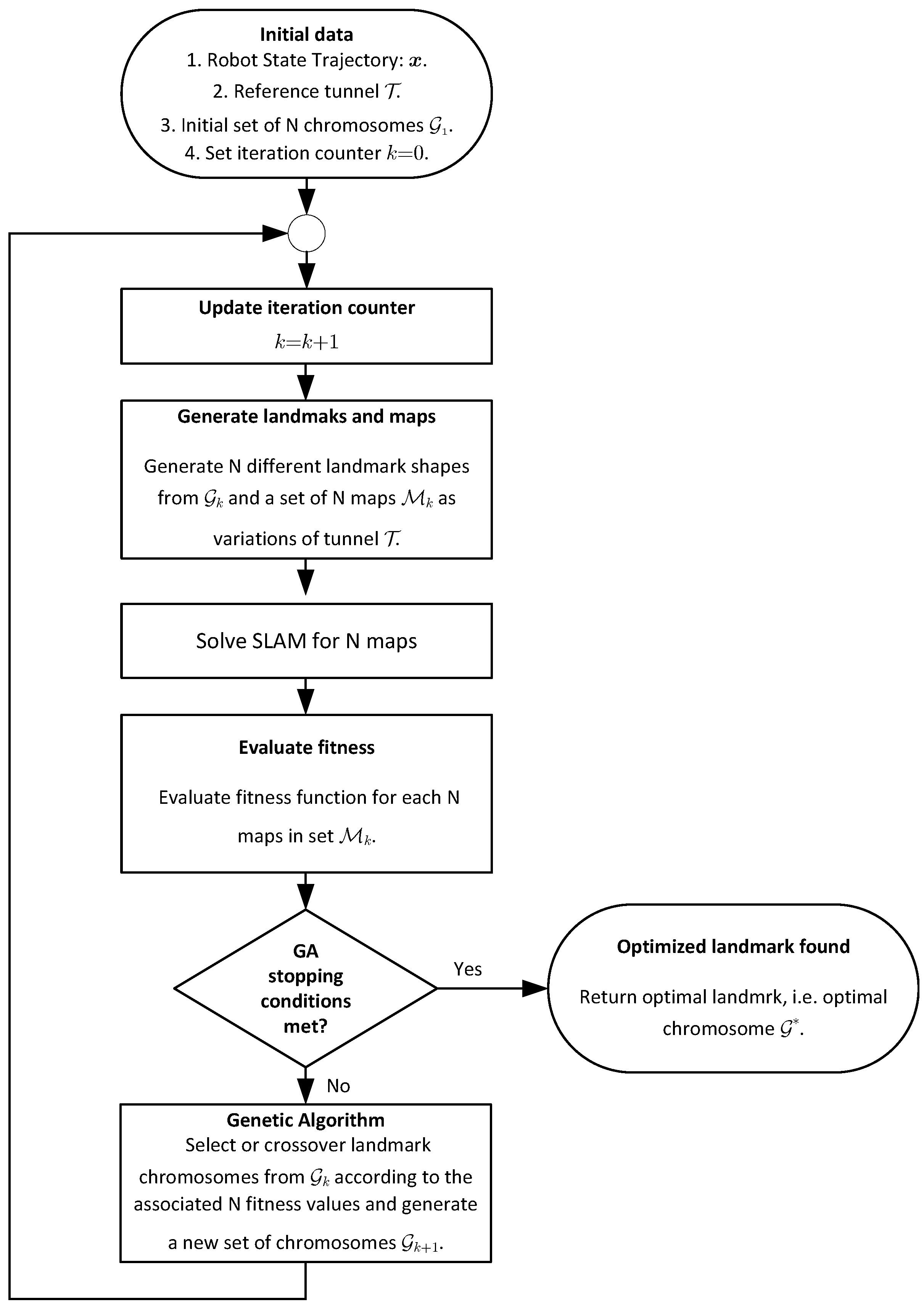
4.4. Optimized Landmark Search Process
5. Results
5.1. Numerical Computation and Simulation Results
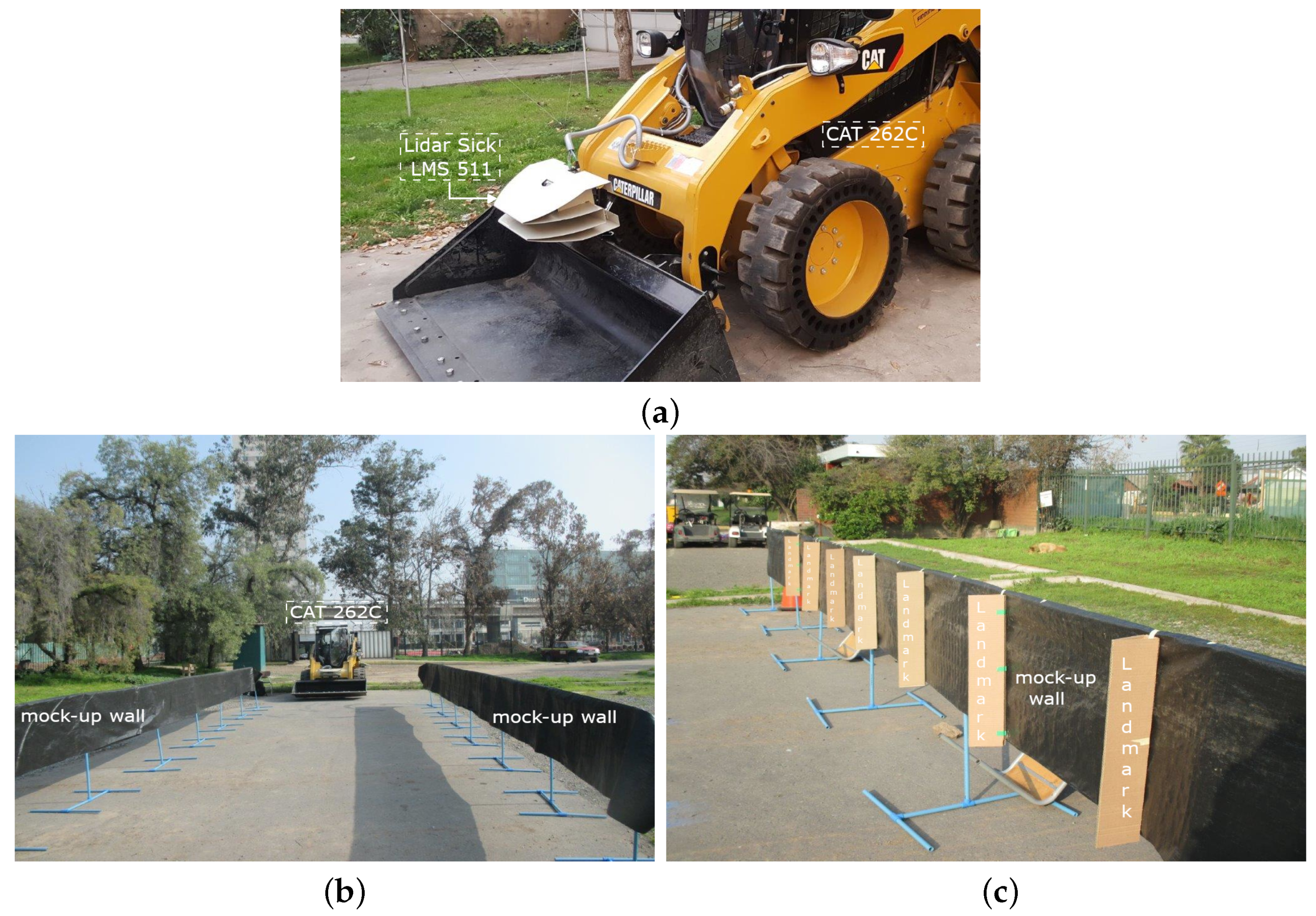
5.2. Experimental Validation
5.3. Validation with an Underground Mine Dataset
6. Discussion
- The approach based on optimized artificial landmarks’ geometry and spacing is suitable for localization and mapping in smoothly bored underground mining tunnels, where no GPS signal is available and where deploying and maintaining a network of active RF or optical beacons is costly and difficult.
- Without landmarks, it is not possible to solve the localization problem using lidar information in smooth tunnels because the localization problem becomes ill-posed, as evidenced by the cumulative error of the positioning without landmarks reported in Table 3. Even if different SLAM techniques have been developed to reduce the well-known localization slip or drift problem [45], reliable underground localization and mapping requires accurate positioning drift-free strategies [7] to ensure industrial grade safety standards. Therefore, artificial landmarks are an essential part of the proposed solution for operation in adverse and challenging underground mining conditions. Other solutions, relying on SLAM algorithms and variants that employ natural landmarks may work partially and exhibit drift sporadically; thus, the use of natural landmarks is still not applicable for 24/7 working schedules required by the mining industry. On the other hand, passive artificial landmarks may be cheaper to manufacture, install, and maintain compared to active RFID or IR beacons.
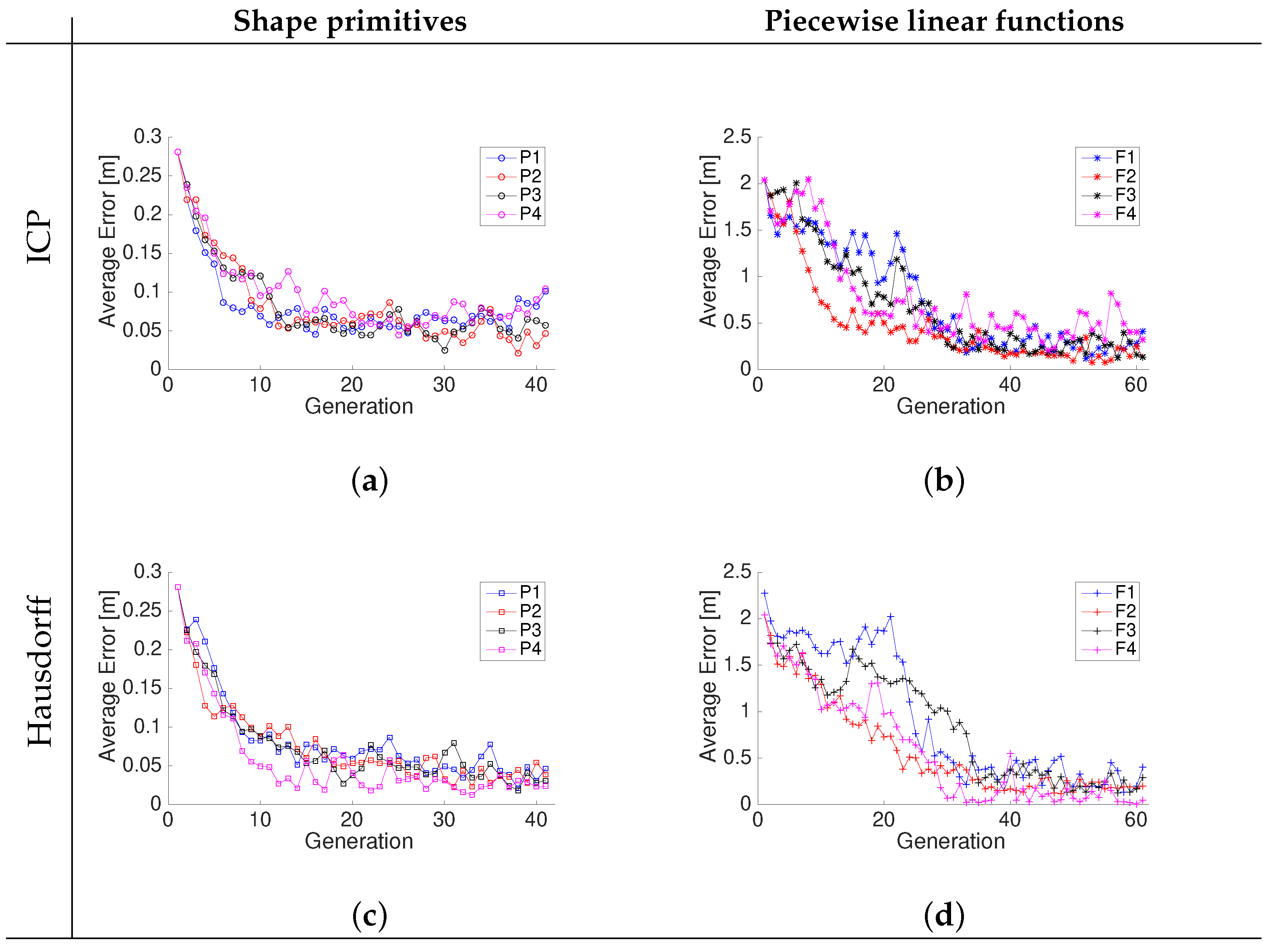
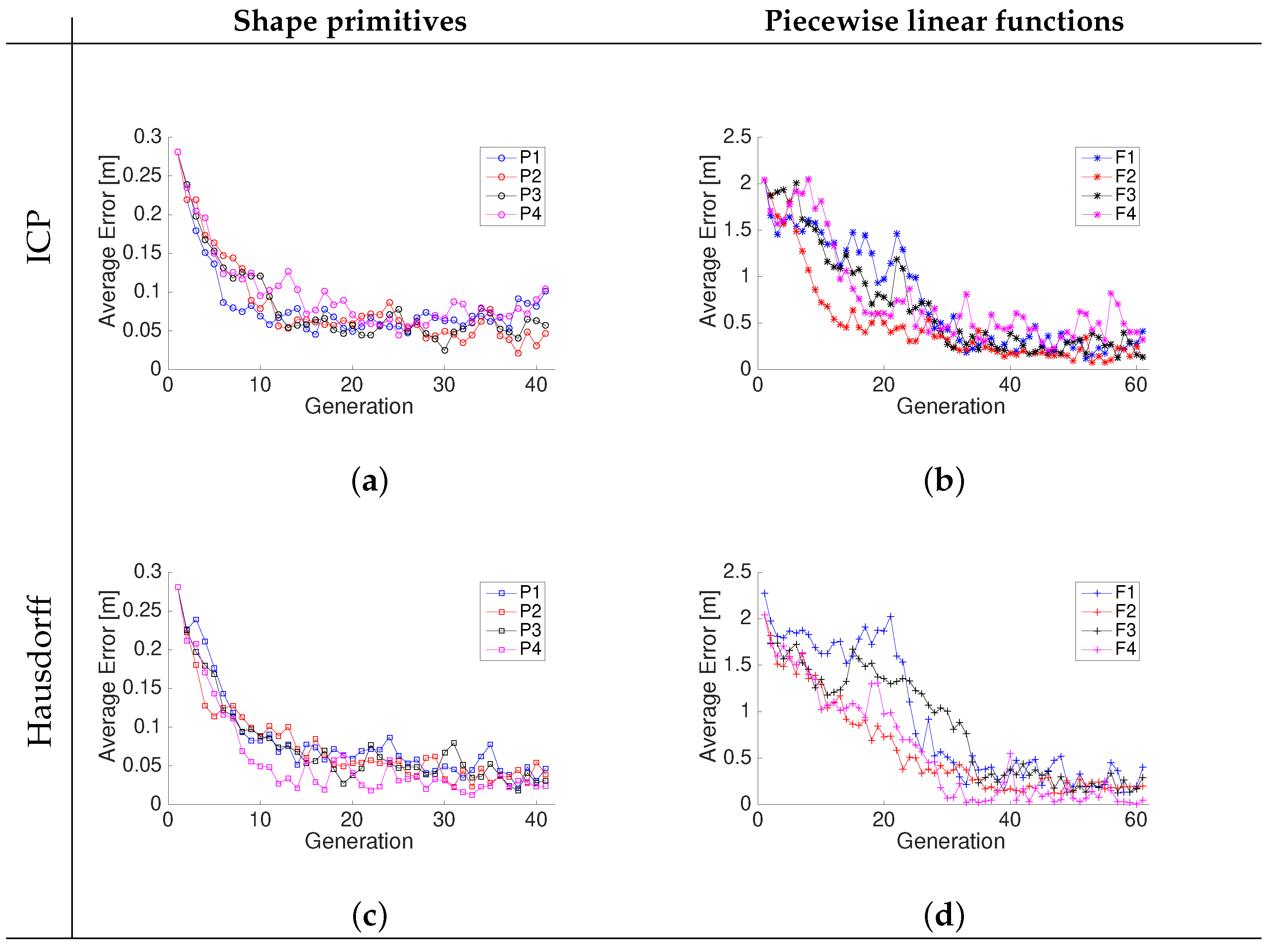
- The optimization of landmark geometries for the different models (shape primitives and piecewise linear) yields expected positioning errors in the range 20–90 mm depending on the geometry. Considering the approximately 50 mm difference between the worst and best model, it is possible to conclude that adequate landmark design and optimization is worth the effort.
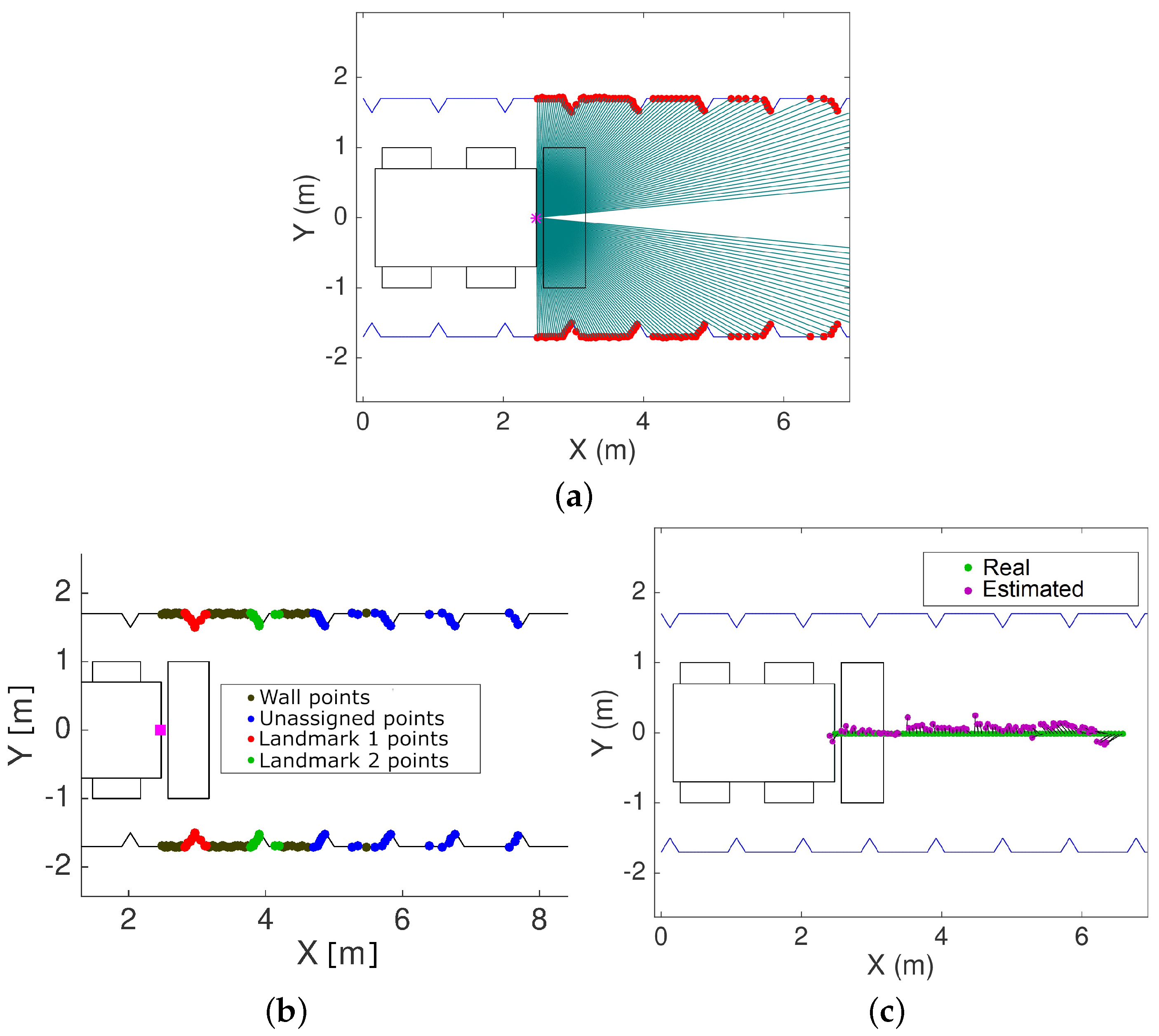
- In addition to the development of an optimization scheme for the landmarks’ geometry and spacing presented in Section 4.4) to improve localization, important contributions that are of practical relevance are the validation of: (i) the feasibility of the approach through experimental validation for localization in relatively smooth tunnels, in which traditional scan matching and visual features do not work due to the lack of sufficiently distinctive features that could be matched without ambiguity (see Table 3); (ii) the advantage of Hausdorff-based matching compared to the ICP method (see Table 2); and (iii) the gains in localization accuracy than can be achieved by optimizing the geometry and spacing of landmarks by means of a genetic algorithm search strategy (see Table 2).
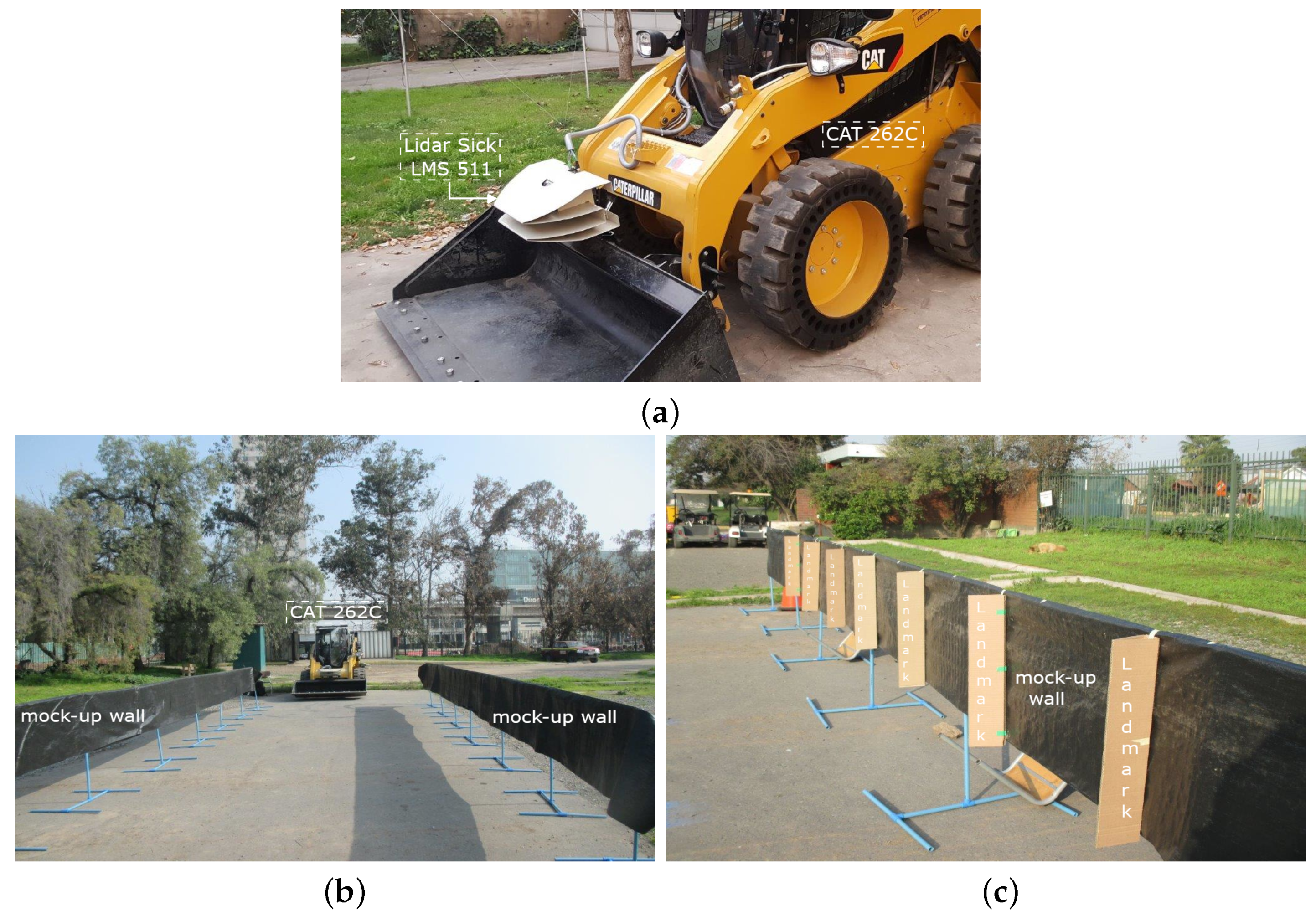
- The experiments were conducted with a mock-up of a smooth tunnel both with and without landmarks. Modern machine-bored tunnels are relatively smooth and lack features. Thus, the mock-up replicates a challenging geometry for matching and localization rather than visual appearance. In order to further validate the approach, an accurate 3D model of a 100 m section of one of the tunnels of the Chilean El Teniente copper mine from the dataset by [8] was employed. Fifteen iterations assuming typical motion disturbances and sensor noise, with magnitudes equivalent to those of the CAT 262C [2] and Sick LMS 511 lidar, were carried out to ensure statistical significance. Future work considers creating a new dataset and additional testing in different underground tunnels, which during this research has not been possible due to increased restrictions to access mining sites during the pandemic.
- The RMS positioning error obtained in the experimental validation of Section 5.2 is influenced by the accuracy of the RTK-DGPS (RMS error of approximately 8.3 cm), which was employed as the ground truth. Another limitation arises from the accuracy and resolution of the lidar scanner, which is approximately 5 cm. We expect that the positioning accuracy measured in our experiments should improve with ongoing technological advances and the development of more accurate lidar and GPS sensors.
- Concerning the practical implementation of the approach, two important aspects need to be considered: (i) the execution time and (ii) the environment’s visibility conditions. The results presented in Section 5.3 show that the execution time is adequate for real-time implementation applicable to underground machines operating at standard speeds of 20 to 30 km/h. The effects of environmental visibility due to dust were not tested as part of this study. However, there exist laser range scanners and other vision systems that have been successfully employed in commercial collision avoidance systems for mining equipment, e.g., SICK’s MINESIC100 EPS, MINESIC100 TCW or Visionary-B.
- The accurate localization of artificial landmarks on the map does not need to be performed using accurate georeferencing or topographic stations since the landmark’s location can be jointly estimated with the position. Once the landmarks have been deployed, practically no maintenance is required unless some are damaged and need to be replaced. The low-maintenance requirements are an advantage of the proposed solution compared to systems requiring energy supply and network connectivity for active optical and RF beacons.
- Our ongoing research efforts are focused on improving the proposed approach with deep learning techniques and neural networks for different purposes, which include visual feature extraction, scene recognition, ego-motion estimation, and map matching. Techniques based on deep neural networks have shown promising results to improve lidar matching, e.g., OverlapNet by Chen et al. (2021) [46], and optical flow estimation, e.g., Flownet by Fischer et al. (2015) [47], including RGB-D SLAM with convolutional neural networks [48] and 3D indoor scene mapping [49]. Hence, these techniques may improve the accuracy and robustness of lidar and visual matching, as well as motion estimation, which are essential for SLAM in underground tunnels. It is to be noted that an important challenge for the application of visual techniques in the harsh mining environments is the poor visibility in tunnels due to low illumination conditions and dust, as well as machine vibrations, which are typically not a problem in indoor or urban robotics.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AGV | Automated Guided Vehicle |
| AMR | Autonomous Mobile Robot |
| DGPS | Differential GPS |
| EKF | Extended Kalman Filter |
| EM | Expectation-maximization algorithm |
| F1 | Piecewise linear free shape |
| F2 | Piecewise linear inverted free shape |
| F3 | Piecewise linear symmetric free shape |
| F4 | Piecewise linear symmetric inverted free shape |
| GCS | Guidance control system |
| GPS | Global Positioning System |
| ICP | Iterative Closest Point |
| IMU | Inertial measurement unit |
| LC | Inductive-capacitive |
| LGV | Laser-guided vehicle |
| LHD | Load-haul and dump |
| MSE | Mean square error |
| NDT | Normal Distribution Transform |
| P1 | Triangular primitive |
| P2 | Rectangular primitive |
| P3 | Parabolic primitive |
| P4 | Linear primitive |
| RANSAC | Random Sample and Consensus |
| RMS | Root mean square |
| RTK | Real time kinematic |
| SLAM | Simultaneous localization and mapping |
References
- Rigotti-Thompson, M.; Torres-Torriti, M.; Auat Cheein, F.; Troni, G. H∞-based Terrain Disturbance Rejection for Hydraulically Actuated Mobile Manipulators with a Non-Rigid Link. IEEE/ASME Trans. Mechatron. 2020, 25, 2523–2533. [Google Scholar] [CrossRef]
- Aguilera-Marinovic, S.; Torres-Torriti, M.; Auat-Cheein, F. General Dynamic Model for Skid-Steer Mobile Manipulators with Wheel–Ground Interactions. IEEE/ASME Trans. Mechatron. 2017, 22, 433–444. [Google Scholar] [CrossRef]
- Thrun, S.; Thayer, S.; Whittaker, W.; Baker, C.; Burgard, W.; Ferguson, D.; Hahnel, D.; Montemerlo, D.; Morris, A.; Omohundro, Z.; et al. Autonomous exploration and mapping of abandoned mines. IEEE Robot. Autom. Mag. 2004, 11, 79–91. [Google Scholar] [CrossRef] [Green Version]
- Donoso-Aguirre, F.; Bustos-Salas, J.P.; Torres-Torriti, M.; Guesalaga, A. Mobile robot localization using the Hausdorff distance. Robotica 2008, 26, 129–141. [Google Scholar] [CrossRef]
- Zhang, X.; He, M.; Yang, J.; Wang, E.; Zhang, J.; Sun, Y. An Innovative Non-Pillar Coal-Mining Technology with Automatically Formed Entry: A Case Study. Engineering 2020, 6, 1315–1329. [Google Scholar] [CrossRef]
- Lösch, R.; Grehl, S.; Donner, M.; Buhl, C.; Jung, B. Design of an Autonomous Robot for Mapping, Navigation, and Manipulation in Underground Mines. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1407–1412. [Google Scholar] [CrossRef]
- Thrybom, L.; Neander, J.; Hansen, E.; Landernas, K. Future Challenges of Positioning in Underground Mines. IFAC-PapersOnLine 2015, 48, 222–226. [Google Scholar] [CrossRef]
- Leung, K.; Lühr, D.; Houshiar, H.; Inostroza, F.; Borrmann, D.; Adams, M.; Nüchter, A.; del Solar, J.R. Chilean underground mine dataset. Int. J. Robot. Res. 2017, 36, 16–23. [Google Scholar] [CrossRef]
- Hu, H.; Gu, D. Landmark-based Navigation of Industrial Mobile Robots. Ind. Robot Int. J. 2004, 27, 458–467. [Google Scholar] [CrossRef] [Green Version]
- Thrun, S. Finding landmarks for mobile robot navigation. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation, Leuven, Belgium, 16–20 May 1998; Volume 2, pp. 958–963. [Google Scholar] [CrossRef] [Green Version]
- Mäkelä, H.; Lehtinen, H.; Rintanen, K.; Koskinen, K. Navigation System for LHD Machines. IFAC Proc. Vol. 1995, 28, 295–300. [Google Scholar] [CrossRef]
- Scheding, S.; Dissanayake, G.; Nebot, E.M.; Durrant-Whyte, H. An experiment in autonomous navigation of an underground mining vehicle. IEEE Trans. Roboti. Autom. 1999, 15, 85–95. [Google Scholar] [CrossRef] [Green Version]
- Lavigne, N.; Marshall, J. A landmark-bounded method for large-scale underground mine mapping. J. Field Robot. 2012, 29, 861–879. [Google Scholar] [CrossRef]
- Wu, D.; Meng, Y.; Zhan, K.; Ma, F. A LIDAR SLAM Based on Point-Line Features for Underground Mining Vehicle. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 2879–2883. [Google Scholar] [CrossRef]
- Ren, Z.; Wang, L.; Bi, L. Robust GICP-based 3D LiDAR SLAM for underground mining environment. Sensors 2019, 19, 2915. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guivant, J.E.; Masson, F.R.; Nebot, E.M. Simultaneous localization and map building using natural features and absolute information. Robot. Auton. Syst. 2002, 40, 79–90. [Google Scholar] [CrossRef]
- Fairfield, N.; Kantor, G.; Wettergreen, D. Real-Time SLAM with Octree Evidence Grids for Exploration in Underwater Tunnels. J. Field Robot. 2007, 24, 3–21. [Google Scholar] [CrossRef] [Green Version]
- Androulakis, V.; Sottile, J.; Schafrik, S.; Agioutantis, Z. Navigation system for a semi-autonomous shuttle car in room and pillar coal mines based on 2D LiDAR scanners. Tunnell. Underground Space Technol. 2021, 117, 104149. [Google Scholar] [CrossRef]
- Donoso, F.; Austin, K.; McAree, P. Three new Iterative Closest Point variant-methods that improve scan matching for surface mining terrain. Robot. Auton. Syst. 2017, 95, 117–128. [Google Scholar] [CrossRef] [Green Version]
- Magnusson, M.; Lilienthal, A.; Duckett, T. Scan registration for autonomous mining vehicles using 3D-NDT. J. Field Robot. 2007, 24, 803–827. [Google Scholar] [CrossRef] [Green Version]
- Magnusson, M.; Nüchter, A.; Lörken, C.; Lilienthal, A.J.; Hertzberg, J. 3D mapping the Kvarntorp mine: A field experiment for evaluation of 3D scan matching algorithms. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Workshop on 3D Mapping, Nice, France, 22–26 September 2008. [Google Scholar]
- Auat Cheein, F.; Torres-Torriti, M.; Rosell-Polo, J.R. Usability analysis of scan matching techniques for localization of field machinery in avocado groves. Comput. Electron. Agricult. 2019, 162, 941–950. [Google Scholar] [CrossRef]
- Hou, Y.; Zhang, H.; Zhou, S.; Zou, H. Use of Roadway Scene Semantic Information and Geometry-Preserving Landmark Pairs to Improve Visual Place Recognition in Changing Environments. IEEE Access 2017, 5, 7702–7713. [Google Scholar] [CrossRef]
- Holliday, A.; Dudek, G. Scale-Robust Localization Using General Object Landmarks. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 1688–1694. [Google Scholar] [CrossRef] [Green Version]
- Suenderhauf, N.; Shirazi, S.; Jacobson, A.; Dayoub, F.; Pepperell, E.; Upcroft, B.; Milford, M. Place Recognition with ConvNet Landmarks: Viewpoint-Robust, Condition-Robust, Training-Free. In Proceedings of the Robotics: Science and Systems, Rome, Italy, 13–17 July 2015. [Google Scholar] [CrossRef]
- Simon, R.; Rupitsch, S.; Baumann, M.; Wu, H.; Peremans, H.; Steckel, J. Bioinspired sonar reflectors as guiding beacons for autonomous navigation. Proc. Natl. Acad. Sci. USA 2020, 117, 1367–1374. [Google Scholar] [CrossRef]
- Nguyen, V.; Martinelli, A.; Tomatis, N.; Siegwart, R. A comparison of line extraction algorithms using 2D laser rangefinder for indoor mobile robotics. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, Canada, 2–6 August 2005; pp. 1929–1934. [Google Scholar] [CrossRef] [Green Version]
- Choe, Y.; Ahn, S.; Chung, M.J. Online urban object recognition in point clouds using consecutive point information for urban robotic missions. Robot. Auton. Syst. 2014, 62, 1130–1152. [Google Scholar] [CrossRef]
- Javanmardi, M.; Javanmardi, E.; Gu, Y.; Kamijo, S. Precise mobile laser scanning for urban mapping utilizing 3D aerial surveillance data. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Guevara, D.J.; Gené-Mola, J.; Gregorio Lopez, E.; Torres-Torriti, M.; Reina, G.; Auat Cheein, F. Comparison of 3D scan matching techniques for autonomous robot navigation in urban and agricultural environments. J. Appl. Remote Sens. 2021, 15, 024508. [Google Scholar] [CrossRef]
- Veronese, L.d.P.; Auat Cheein, F.; Bastos-Filho, T.; Ferreira De Souza, A.; de Aguiar, E. A Computational Geometry Approach for Localization and Tracking in GPS-denied Environments. J. Field Robot. 2016, 33, 946–966. [Google Scholar] [CrossRef]
- Rusinkiewicz, S.; Levoy, M. Efficient variants of the ICP algorithm. In Proceedings of the Third International Conference on 3-D Digital Imaging and Modeling, Quebec City, Canada, 28 May–1 June 2001; pp. 145–152. [Google Scholar] [CrossRef] [Green Version]
- Chipperfield, A.J.; Fleming, P.J.; Pohlheim, H.; Fonseca, C.M. A genetic algorithm toolbox for Matlab. In Proceedings of the Tenth International Conference on Systems Engineering (ICSE ’94), Conventry, United Kingdom, 6–8 September 1994; pp. 200–207. [Google Scholar]
- Man, K.F.; Tang, K.S.; Kwong, S. Genetic algorithms: Concepts and applications [in engineering design]. IEEE Trans. Ind. Electron. 1996, 43, 519–534. [Google Scholar] [CrossRef]
- Baker, J.E. Reducing Bias and Inefficiency in the Selection Algorithm. In Proceedings of the Second International Conference on Genetic Algorithms on Genetic Algorithms and Their Application, Cambridge, MA, USA, 28–31 July 1987; pp. 14–21. [Google Scholar]
- Douc, R.; Cappé, O.; Moulines, E. Comparison of resampling schemes for particle filtering. In Proceedings of the 4th International Symposium on Image and Signal Processing and Analysis, ISPA 2005, Zagreb, Croatia, 15–17 September 2005; pp. 64–69. [Google Scholar] [CrossRef] [Green Version]
- Grisetti, G.; Stachniss, C.; Burgard, W. Improved Techniques for Grid Mapping with Rao-Blackwellized Particle Filters. IEEE Trans. Robot. 2007, 23, 34–46. [Google Scholar] [CrossRef] [Green Version]
- Pedrosa, E.; Lau, N.; Pereira, A. Online SLAM Based on a Fast Scan-Matching Algorithm. In Progress in Artificial Intelligence; Correia, L., Reis, L.P., Cascalho, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 295–306. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Tapia-Espinoza, R.; Torres-Torriti, M. Robust lane sensing and departure warning under shadows and occlusions. Sensors 2013, 13, 3270–3298. [Google Scholar] [CrossRef] [Green Version]
- Speta, M.; Rivard, B.; Feng, J.; Lipsett, M.; Gingras, M. Hyperspectral imaging for the characterization of athabasca oil sands drill core. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 2184–2187. [Google Scholar] [CrossRef]
- Leblon, B.; Gallant, L.; Granberg, H. Effects of shadowing types on ground-measured visible and near-infrared shadow reflectances. Remote Sens. Environ. 1996, 58, 322–328. [Google Scholar] [CrossRef]
- Sick AG. LMS5xx Laser Measurement Sensors Operating Instructions; Sick AG: Waldkirch, Germany, 2015. [Google Scholar]
- Auat Cheein, F.; Torres-Torriti, M.; Hopfenblatt, N.B.; Prado, A.J.; Calabi, D. Agricultural service unit motion planning under harvesting scheduling and terrain constraints. J. Field Robot. 2017, 34, 1531–1542. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. Laser-visual-inertial Odometry and Mapping with High Robustness and Low Drift. J. Field Robot. 2018, 35, 1242–1264. [Google Scholar] [CrossRef]
- Chen, X.; Läbe, T.; Milioto, A.; Röhling, T.; Behley, J.; Cyrill Stachniss, C. OverlapNet: A siamese network for computing LiDAR scan similarity with applications to loop closing and localization. Auton. Robots 2022, 46, 61–81. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Fischer, P.; Ilg, E.; Häusser, P.; Hazirbas, C.; Golkov, V.; Smagt, P.V.D.; Cremers, D.; Brox, T. FlowNet: Learning Optical Flow with Convolutional Networks. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 11–18 December 2015; pp. 2758–2766. [Google Scholar] [CrossRef] [Green Version]
- Xu, G.; Li, X.; Zhang, X.; Xing, G.; Pan, F. Loop Closure Detection in RGB-D SLAM by Utilizing Siamese ConvNet Features. Appl. Sci. 2022, 12, 62. [Google Scholar] [CrossRef]
- Weinmann, M.; Wursthorn, S.; Weinmann, M.; Hübner, P. Efficient 3D Mapping and Modelling of Indoor Scenes with the Microsoft HoloLens: A Survey. PFG J. Photogramm. Remote Sens. Geoinform. Sci. 2021, 89, 319–333. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Values (Genes) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Landmark Model | Units | H | W | D | |||||||
| Primitive shape | Min. | m | 0.01 | 0.01 | 0 | - | - | - | - | - | - |
| Max. | m | 0.30 | 0.60 | 100 | - | - | - | - | - | - | |
| Piecewise linear | Min. | m | 0.01 | 0.05 | 0 | −2.00 | −2.00 | −2.00 | −2.00 | −2.00 | −2.00 |
| Max. | m | 0.35 | 0.150 | 750 | 2.00 | 2.00 | 2.00 | 2.00 | 2.00 | 2.00 | |
| RMS Error [m] | RMS Error [m] | ||||
|---|---|---|---|---|---|
| Primitive Shape Models | ICP | Hausdorff | Piecewise Linear Model | ICP | Hausdorff |
| P1 | 0.042 | 0.022 | F1 | 0.073 | 0.052 |
| P2 | 0.091 | 0.026 | F2 | 0.043 | 0.064 |
| P3 | 0.063 | 0.028 | F3 | 0.033 | 0.068 |
| P4 | 0.065 | 0.026 | F4 | 0.035 | 0.024 |
| RMS Localization Error [m] | |||
|---|---|---|---|
| Experiment | ICP | Hausdorff | |
| 1 | Without landmarks | 20.765 ± 0.074 | 19.748 ± 0.113 |
| 2 | P1—Triangular shape landmark | 0.258 ± 0.046 | 0.235 ± 0.035 |
| 3 | F4—Symmetric inverted landmark | 0.206 ± 0.096 | 0.219 ± 0.093 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Torres-Torriti , M.; Nazate-Burgos , P.; Paredes-Lizama , F.; Guevara, J.; Auat Cheein, F. Passive Landmark Geometry Optimization and Evaluation for Reliable Autonomous Navigation in Mining Tunnels Using 2D Lidars. Sensors 2022, 22, 3038. https://doi.org/10.3390/s22083038
Torres-Torriti M, Nazate-Burgos P, Paredes-Lizama F, Guevara J, Auat Cheein F. Passive Landmark Geometry Optimization and Evaluation for Reliable Autonomous Navigation in Mining Tunnels Using 2D Lidars. Sensors. 2022; 22(8):3038. https://doi.org/10.3390/s22083038
Chicago/Turabian StyleTorres-Torriti , Miguel, Paola Nazate-Burgos , Fabián Paredes-Lizama , Javier Guevara, and Fernando Auat Cheein. 2022. "Passive Landmark Geometry Optimization and Evaluation for Reliable Autonomous Navigation in Mining Tunnels Using 2D Lidars" Sensors 22, no. 8: 3038. https://doi.org/10.3390/s22083038
APA StyleTorres-Torriti , M., Nazate-Burgos , P., Paredes-Lizama , F., Guevara, J., & Auat Cheein, F. (2022). Passive Landmark Geometry Optimization and Evaluation for Reliable Autonomous Navigation in Mining Tunnels Using 2D Lidars. Sensors, 22(8), 3038. https://doi.org/10.3390/s22083038