
The Effect of Changes in Magnetic Field and Frequency on the Vibration of a Thin Magnetostrictive Patch as a Tool for Generating Guided Ultrasonic Waves



Abstract
:1. Introduction
2. Experimental Work
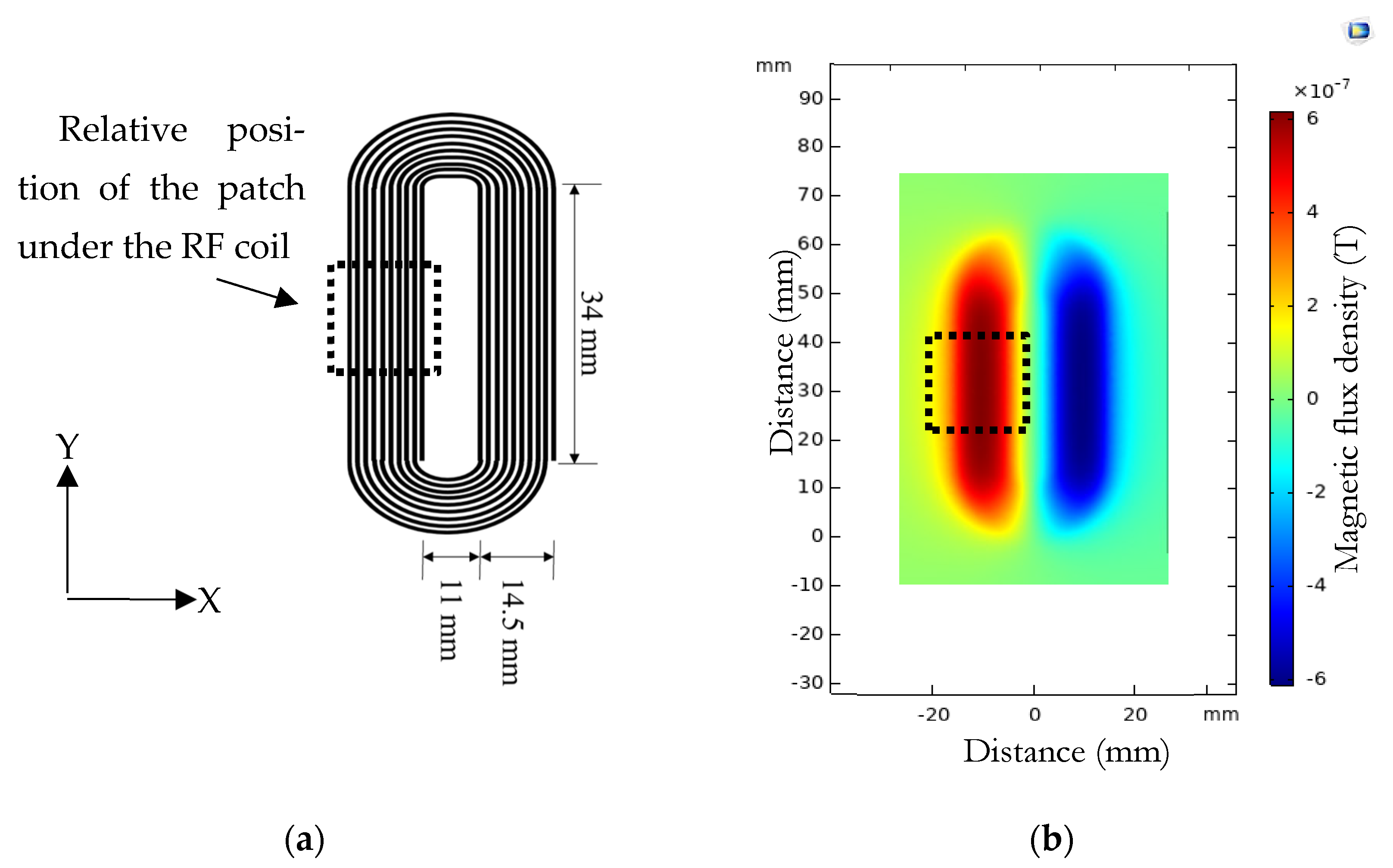
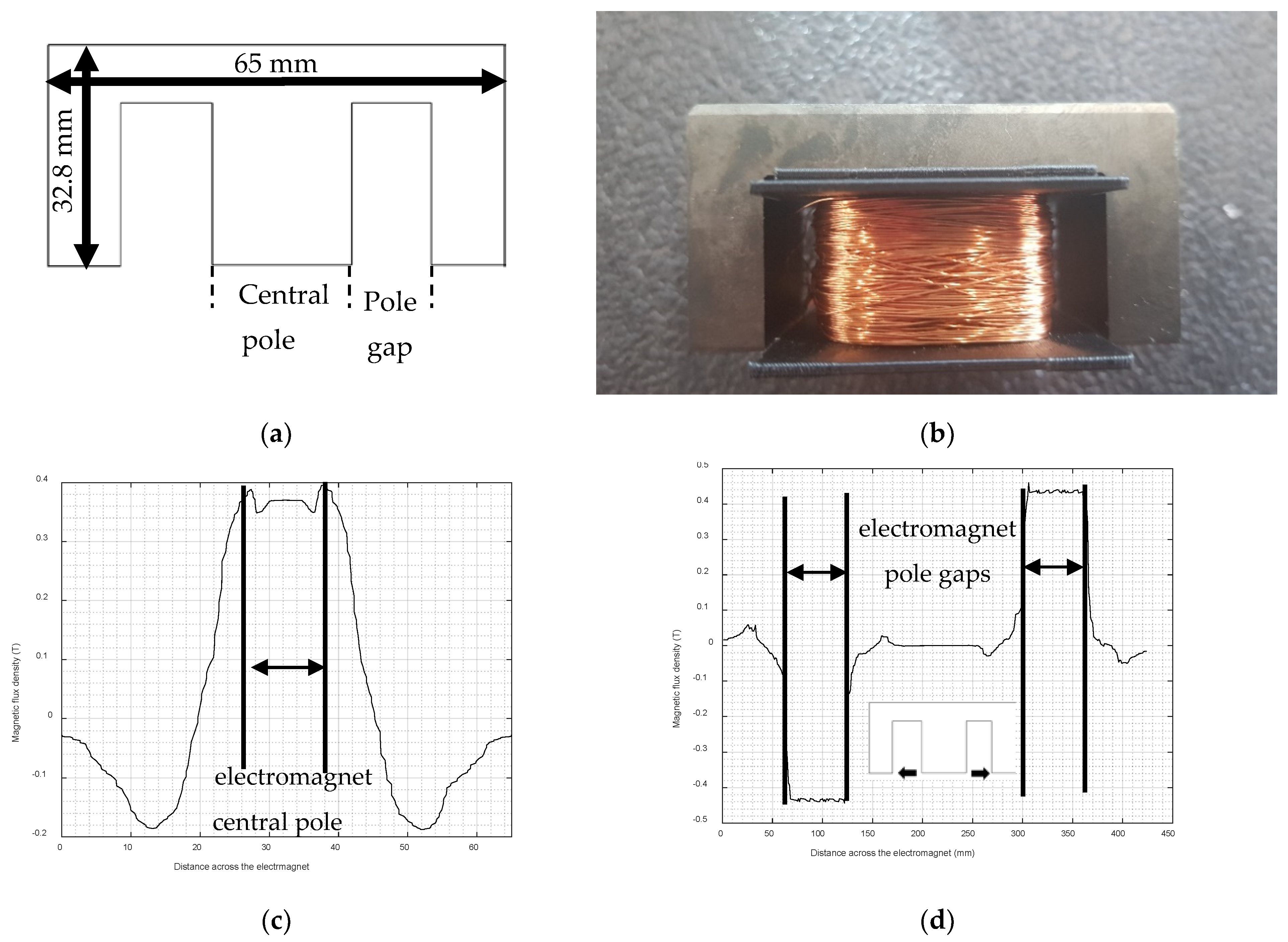
2.1. Electromagnet and RF Coil Design Generating the Different Magnetic Fields
2.2. Experimental Apparatus
3. Results
3.1. Static Magnetic Field (Bs) in the Out-of-Plane Direction
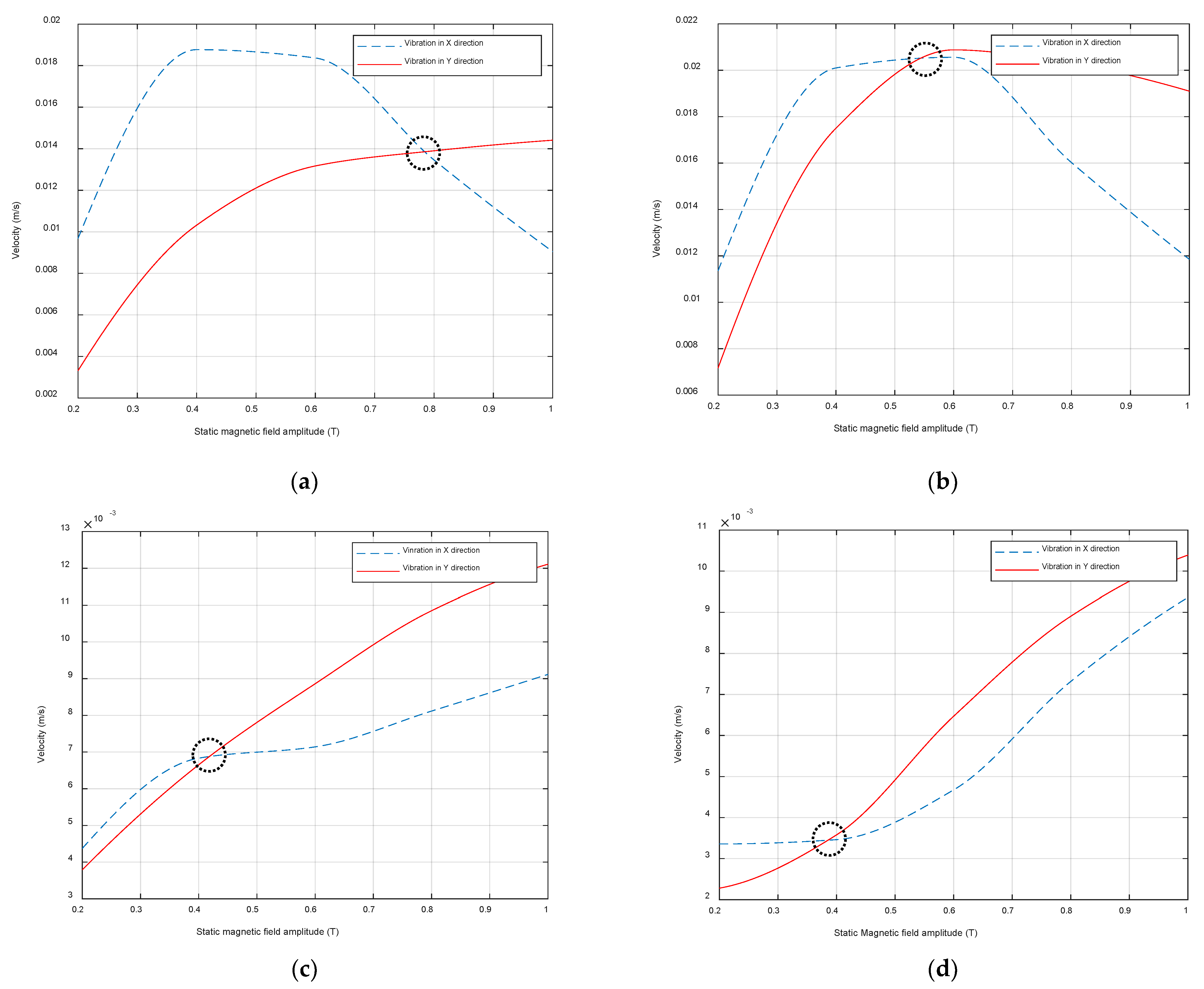
3.2. Bs and Bd In-Plane, Parallel to the Surface of the Magnetostrcitve Patch and Orthogonal to Each Other
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, W.; Bian, L.X.; Cheng, L.; Rui, X.T. Non-linear compensation and displacement control of the bias-rate-dependent hysteresis of a magnetostrictive actuator. Precis. Eng. 2017, 50, 107–113. [Google Scholar] [CrossRef]
- Bieńkowski, A.; Kulikowski, J. The magneto-elastic Villari effect in ferrites. J. Magn. Magn. Mater. 1980, 19, 120–122. [Google Scholar] [CrossRef]
- Witthauer, A.; Kim, G.; Faidley, L.; Zou, Q.; Wang, Z. Design and characterization of a flextensional stage based on Terfenol-D actuator. Int. J. Precis. Eng. Manuf. 2014, 15, 135–141. [Google Scholar] [CrossRef]
- Li, M.; Li, J.; Bao, X.; Mu, X.; Gao, X. Magnetostrictive Fe82Ga13.5Al4.5 wires with large Wiedemann twist over wide temperature range. Mater. Des. 2017, 135, 197–203. [Google Scholar] [CrossRef]
- Chang, H.; Liao, S.; Hsieh, H.; Wen, J.; Lai, C.; Fang, W. Magnetostrictive type inductive sensing pressure sensor. Sens. Actuators A Phys. 2016, 238, 25–36. [Google Scholar] [CrossRef]
- Bieńkowski, A.; Szewczyk, R. Magnetostrictive Properties of Mn0.70Zn0.24Fe2.06O4 Ferrite. Materials 2018, 11, 1894. [Google Scholar] [CrossRef] [Green Version]
- Zhukov, A.; Ipatov, M.; Churyukanova, M.; Talaat, A.; Blanco, J.M.; Zhukova, V. Trends in optimization of giant magnetoimpedance effect in amorphous and nanocrystalline materials. J. Alloys Compd. 2017, 727, 887–901. [Google Scholar] [CrossRef]
- Ghosh, D. Structural Health Monitoring of Composite Structures Using Magnetostrictive Sensors and Actuators. Ph.D. Thesis, Indian Institute of Science, Bengaluru, India, 2006. [Google Scholar]
- Joule, J.P. On the effects of magnetism upon the dimensions of iron and steel bars. Phil. Mag. 1847, 111, 30–76. [Google Scholar]
- Hirao, M.; Ogi, H. EMATs for Science and Industry: Noncontacting Ultrasonic Measurements; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Jiles, D. Introduction to Magnetism and Magnetic Materials; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Seco, F.; Martín, J.M.; Jiménez, A.R. Improving the accuracy of magnetostrictive linear position sensors. IEEE Trans. Instrum. Meas. 2008, 58, 722–729. [Google Scholar] [CrossRef]
- Li, Y.; Sun, L.; Jin, S.; Sun, L.B. Development of magnetostriction sensor for on-line liquid level and density measurement. In Proceedings of the 2006 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; pp. 5162–5166. [Google Scholar]
- Gao, X.; Pei, Y.; Fang, D. Magnetomechanical behaviors of giant magnetostrictive materials. Acta Mech. Solida Sin. 2008, 21, 15–18. [Google Scholar] [CrossRef]
- Sablik, M.J.; Jiles, D.C. A model for hysteresis in magnetostriction. J. Appl. Phys. 1988, 64, 5402–5404. [Google Scholar] [CrossRef]
- Butler, J.L. Application Manual for the Design of Terfenol-D Magnetostrictive Transducers; Edge Technologies Inc.: Ames, IA, USA, 1988. [Google Scholar]
- Liang, X.; Dong, C.; Chen, H.; Wang, J.; Wei, Y.; Zaeimbashi, M.; He, Y.; Matyushov, A.; Sun, C.; Sun, N. A review of thin-film magnetoelastic materials for magnetoelectric applications. Sensors 2020, 20, 1532. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hall, D.L.; Flatau, A.B. One-dimensional analytical constant parameter linear electromagnetic-magnetomechanical models of a cylindrical magnetostrictive (Terfenol-D) transducer. J. Intell. Mater. Syst. Struct. 1995, 6, 315–328. [Google Scholar] [CrossRef]
- Li, P.; Liu, Q.; Li, S.; Wang, Q.; Zhang, D.; Li, Y. Design and numerical simulation of novel giant magnetostrictive ultrasonic transducer. Results Phys. 2017, 7, 3946–3954. [Google Scholar] [CrossRef]
- Zhai, G.; Jiang, T.; Kang, L.; Wang, S. Minimizing influence of multi-modes and dispersion of electromagnetic ultrasonic Lamb waves. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 2725–2733. [Google Scholar] [CrossRef] [PubMed]
- Moffett, M.B.; Clark, A.E.; Wun-Fogle, M.; Linberg, J.; Teter, J.P.; McLaughlin, E.A. Characterization of Terfenol-D for magnetostrictive transducers. J. Acoust. Soc. Am. 1991, 89, 1448–1455. [Google Scholar] [CrossRef]
- Gińko, O.; Juś, A.; Szewczyk, R. Test Stand for Measuring Magnetostriction Phenomena under External Mechanical Stress with Foil Strain Gauges. In International Conference on Automation; Springer: Berlin/Heidelberg, Germany, 2016; pp. 843–853. [Google Scholar]
- Weiss, P. L’hypothèse du champ moléculaire et la propriété ferromagnétique. J. Phys. Theor. Appl. 1907, 6, 661–690. [Google Scholar] [CrossRef]
- Kim, Y.Y.; Kwon, Y.E. Review of magnetostrictive patch transducers and applications in ultrasonic nondestructive testing of waveguides. Ultrasonics 2015, 62, 3–19. [Google Scholar] [CrossRef] [Green Version]
- Dapino, M.J. On magnetostrictive materials and their use in adaptive structures. Struct. Eng. Mech. 2004, 17, 303–330. [Google Scholar] [CrossRef] [Green Version]
- Joule, J.P. On a new class of magnetic forces. Ann. Electr. Magn. Chem. 1842, 8, 219–224. [Google Scholar]
- Dimitropoulos, P.D.; Avaritsiotis, J.N. A micro-fluxgate sensor based on the Matteucci effect of amorphous magnetic fibers. Sens. Actuators A Phys. 2001, 94, 165–176. [Google Scholar] [CrossRef]
- Villari, E. Ueber die Aenderungen des magnetischen Moments, welche der Zug und das Hindurchleiten eines galvanischen Stroms in einem Stabe von Stahl oder Eisen hervorbringen. Ann. Phys. 1865, 202, 87–122. [Google Scholar] [CrossRef] [Green Version]
- Zitoun, A.; Dixon, S.; Edwards, G.; Hutchins, D. Experimental Study of the Guided Wave Directivity Patterns of Thin Removable Magnetostrictive Patches. Sensors 2020, 20, 7189. [Google Scholar] [CrossRef]
- Laguerre, L.; Aime, J.; Brissaud, M. Magnetostrictive pulse-echo device for non-destructive evaluation of cylindrical steel materials using longitudinal guided waves. Ultrasonics 2002, 39, 503–514. [Google Scholar] [CrossRef]
- Kim, Y.; Moon, H.; Park, K.; Lee, J. Generating and detecting torsional guided waves using magnetostrictive sensors of crossed coils. NDT E Int. 2011, 44, 145–151. [Google Scholar] [CrossRef]
- Juś, A.; Nowak, P.; Gińko, O. Assessment of the magnetostrictive properties of the selected construction steel. Acta Phys. Pol. A 2017, 131, 1084–1086. [Google Scholar] [CrossRef]
- Wu, J.; Tang, Z.; Yang, K.; Lv, F. Signal strength enhancement of magnetostrictive patch transducers for guided wave inspection by magnetic circuit optimization. Appl. Sci. 2019, 9, 1477. [Google Scholar] [CrossRef] [Green Version]
- Lee, E.W. Magnetostriction curves of polycrystalline ferromagnetics. Proc. Phys. Soc. 1958, 72, 249. [Google Scholar] [CrossRef]
- Hu, C.; Xu, J. Center frequency shift in pipe inspection using magnetostrictive guided waves. Sens. Actuators A Phys. 2019, 298, 111583. [Google Scholar] [CrossRef]
- Kim, H.J.; Lee, J.S.; Kim, H.W.; Lee, H.S.; Kim, Y.Y. Numerical simulation of guided waves using equivalent source model of magnetostrictive patch transducers. Smart Mater. Struct. 2014, 24, 015006. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Patch Material | Iron–Cobalt Alloy |
|---|---|
| Shape | square |
| Dimensions | 20 mm × 20 mm × 0.1 mm |
| Young’s Modulus | 200 GPa |
| Poisson Ratio | 0.29 |
| Density | 8.12 g/cm3 |
| Electrical Resistivity | 0.42 µΩm |
| Permeability | 18,000 N A−2 |
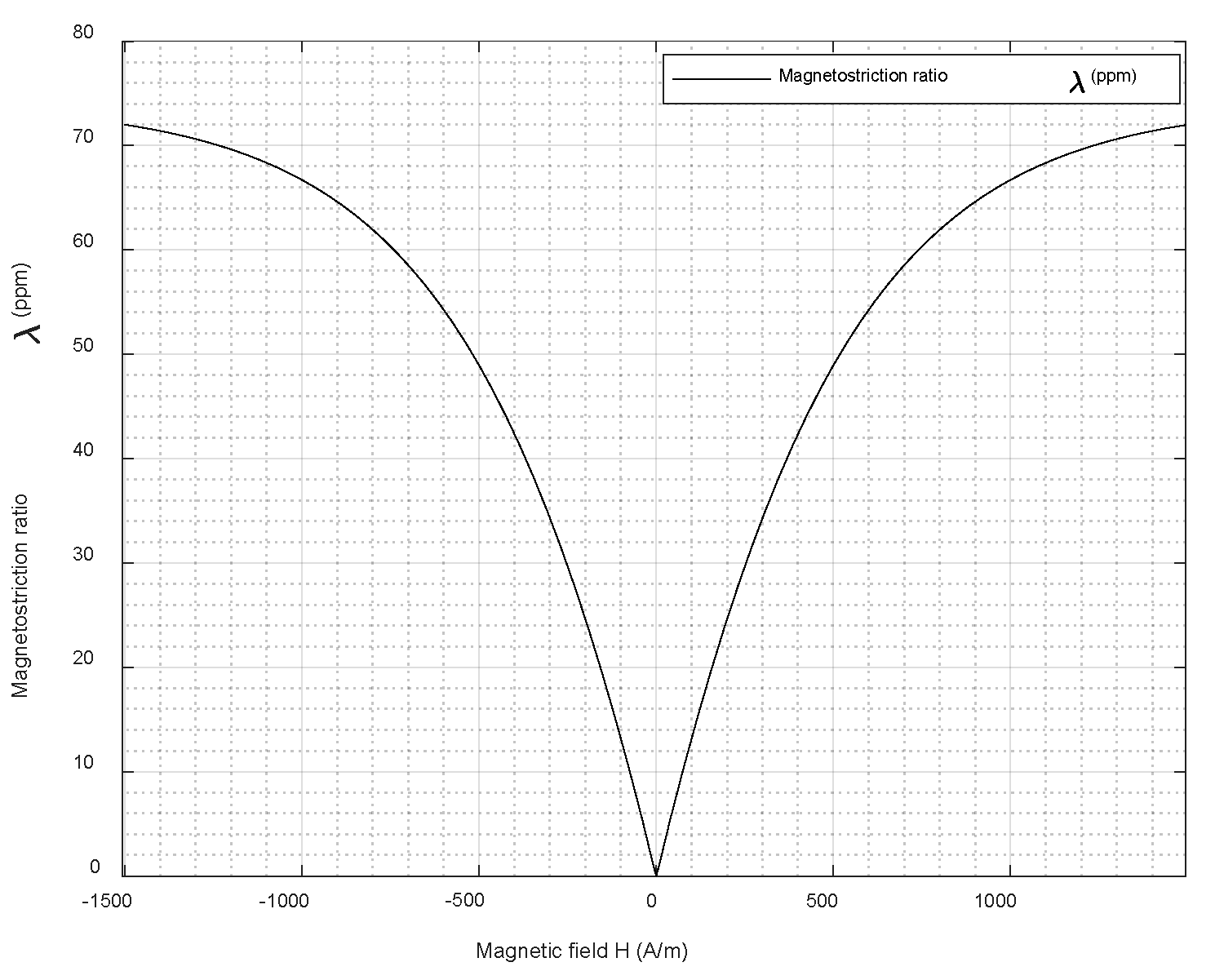
| Saturation Magnetostriction | 70 ppm |
| Saturation Magnetisation | 2.35 T |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zitoun, A.; Dixon, S.; Kazilas, M.; Hutchins, D. The Effect of Changes in Magnetic Field and Frequency on the Vibration of a Thin Magnetostrictive Patch as a Tool for Generating Guided Ultrasonic Waves. Sensors 2022, 22, 766. https://doi.org/10.3390/s22030766
Zitoun A, Dixon S, Kazilas M, Hutchins D. The Effect of Changes in Magnetic Field and Frequency on the Vibration of a Thin Magnetostrictive Patch as a Tool for Generating Guided Ultrasonic Waves. Sensors. 2022; 22(3):766. https://doi.org/10.3390/s22030766
Chicago/Turabian StyleZitoun, Akram, Steven Dixon, Mihalis Kazilas, and David Hutchins. 2022. "The Effect of Changes in Magnetic Field and Frequency on the Vibration of a Thin Magnetostrictive Patch as a Tool for Generating Guided Ultrasonic Waves" Sensors 22, no. 3: 766. https://doi.org/10.3390/s22030766
APA StyleZitoun, A., Dixon, S., Kazilas, M., & Hutchins, D. (2022). The Effect of Changes in Magnetic Field and Frequency on the Vibration of a Thin Magnetostrictive Patch as a Tool for Generating Guided Ultrasonic Waves. Sensors, 22(3), 766. https://doi.org/10.3390/s22030766