1. Introduction
Wearable devices, including accelerometers, are the most commonly used tools to objectively evaluate physical activity and mobility in large-scale studies [
1]. They measure body acceleration in all three axes, and the gathered data can be used to classify different movement behaviors and body postures [
1,
2,
3,
4]. One of the first steps when carrying out such analyses is the detection of non-wear periods, i.e., the time during which the device is not worn for various reasons, e.g., during showering or other aquatic activities, forgetting to reattach the device afterwards, or removal of the sensor due to the fact of discomfort [
2,
5]. The identification of non-wear periods is crucial in clinical and epidemiological studies where accelerometer-derived movements and physical activity parameters are used as health outcomes. First, detection of wear/non-wear allows for measurement of the patients’ compliance along with validation of monitoring days for further analysis [
2,
4]. Secondly, it reduces the risk of potential bias of derived physical activity parameters and outcome evaluation, as weak acceleration signals during non-wearing are often misclassified as sedentary behaviors or sleep by physical activity analysis algorithms. This can be particularly problematic for older adults or groups of patients that spend a significant amount of time being inactive.
The accurate detection of non-wear time is still an ongoing issue, since this problem has received little attention and studies have failed to address it adequately. Current algorithms are often based exclusively on data collected by accelerometer sensors incorporated into monitoring devices [
2,
4,
6]. Typical methods used to detect periods of zero-activity counts, thus indicating low levels of activity, with an appropriate threshold on the activity counts signal (time series) over epochs of 30 s or 1 min. Once the entire signal is scanned, the epochs are grouped into windows of 30, 60, or 90 min in order to ignore motion artifacts [
4,
7]. However, such a metric presents several limitations. A “count” is an arbitrary value that is specific to the device manufacturer and, thus, difficult to generalize across different accelerometers [
3,
5,
7]. Moreover, these algorithms are typically validated in a laboratory with devices being worn during waking hours only, meaning they cannot be applied to protocols monitoring patients in a free-living setting over a period of multiple days [
5]. Finally, they are problematic in two situations in particular: when motion artifacts are present during non-wearing periods and when inactivity extends for long periods. In the first case, non-wear may be misclassified as low activity, whereas in the second case, sedentary behaviors could be misclassified as non-wear [
3,
7].
Few studies have focused on analyzing raw accelerometer data. Raw data are more meaningful and interpretable than activity counts, as it is the wearer of the device that directly causes the signal [
3]. Ahmadi et al. [
5] evaluated the performances of four algorithms based on raw data, where the standard deviation of the acceleration in three axes and the standard deviation of the vector magnitude were two of the metrics used. The algorithm using the norm of the acceleration was the most promising and was shown to be the most sensitive to movement and the most robust to noise. However, the accelerometer is sensitive to movement artifacts, independent of the used metrics, and the choice of the window that regroups shorter non-wear epochs is the determining factor. Moreover, differentiating between sleep and non-wear periods remains difficult, and misclassification is therefore unavoidable [
3].
To improve the performance of non-wear algorithms, more recent studies have started to use temperature sensors. When worn in contact with the body, the device is influenced by body temperature, and once removed, the temperature signal normally decreases to reach an equilibrium with the surroundings. Two previous studies [
3,
8] used a temperature threshold and the average value of the temperature over a certain window to estimate non-wear periods with some differences. Zhou et al. [
3] used the GENEActiv watch worn at the wrist and combined acceleration and temperature signals to identify non-wear periods, and the temperature threshold was fixed at 26 °C. Duncan et al. [
8] used a dual-accelerometer system with Axivity devices worn at the thigh and lower back, and used the temperature signal alone with a dynamic threshold (computed from 18 °C) to characterize non-wear periods. The common issue with both methods is that the threshold is defined in terms of
absolute temperature, which reduces generalizability of the results, as this value depends on the outdoor temperature, which varies among regions and on the device used. It is therefore necessary to adapt it to different situations [
3,
8].
Despite rapid developments in sensor technology and related software, the accurate distinction between non-wearing, daily inactivity, and sleep remains unsolved, which is particularly problematic for the long-term monitoring of frail older adults or patients with severe conditions. Therefore, the objective of the current study was to (1) develop robust non-wearing detection algorithms based on acceleration and/or temperature that reduce misclassification errors; (2) validate the algorithms using real-world data recorded according to an appropriate measurement protocol.
4. Discussion
The goal of the current study was to develop a robust algorithm that is able to distinguish between non-wearing and daily inactivity or (nighttime) sleep, as this is still an ongoing issue and can be problematic, especially when monitoring frail older adults or patients with severe conditions. The algorithm used a new approach based on specific events derived from the temperature signal, and a relative temperature threshold of 3 °C to discriminate true and false non-wear events. It was validated using real-world data and the performance was compared with state-of-the-art algorithms, showing high sensitivity and specificity.
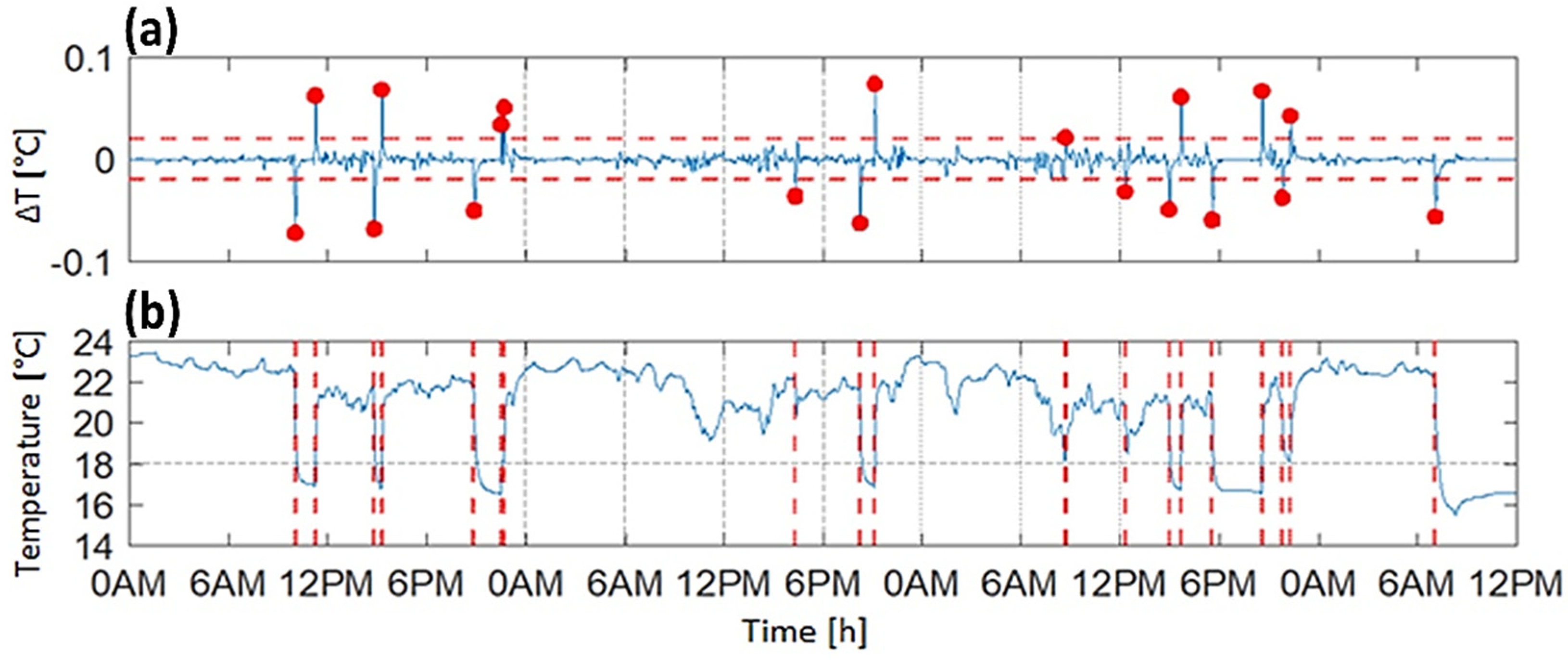
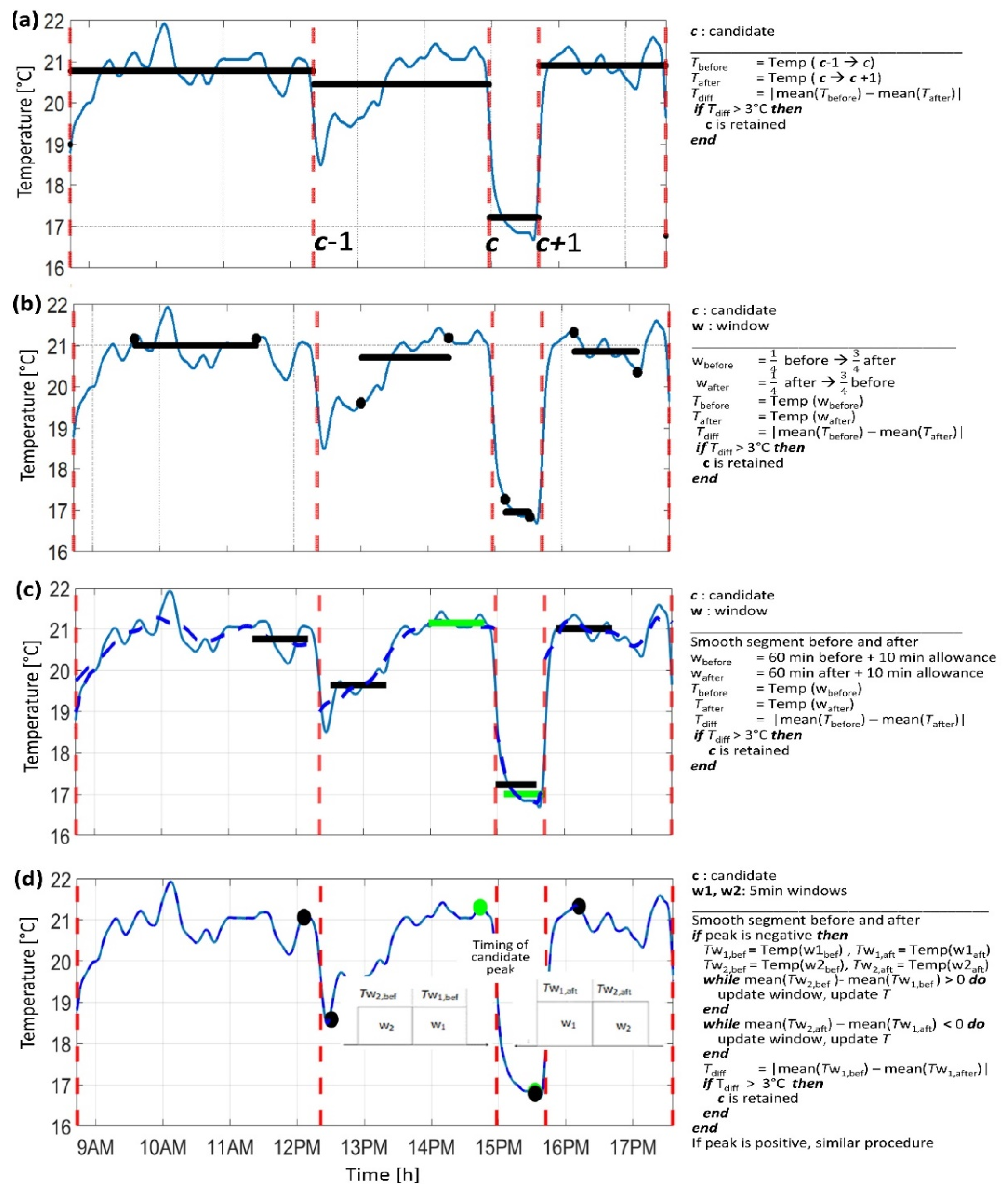
Filtering and pre-processing: The performance of the event- and temperature-based algorithms depends on the peaks in the derivative of the temperature signal, with their amplitude being expected to increase with fast and important temperature changes, as, for example, when the device is removed and reattached. Due to the low signal-to-noise ratio and the slow response time of the temperature sensor, the amplitude of such peaks appeared very weak. Therefore, in order to enhance the relevant peaks, appropriate smoothing using the Savitzky-Golay filter and downsampling was necessary before applying the derivative operator.
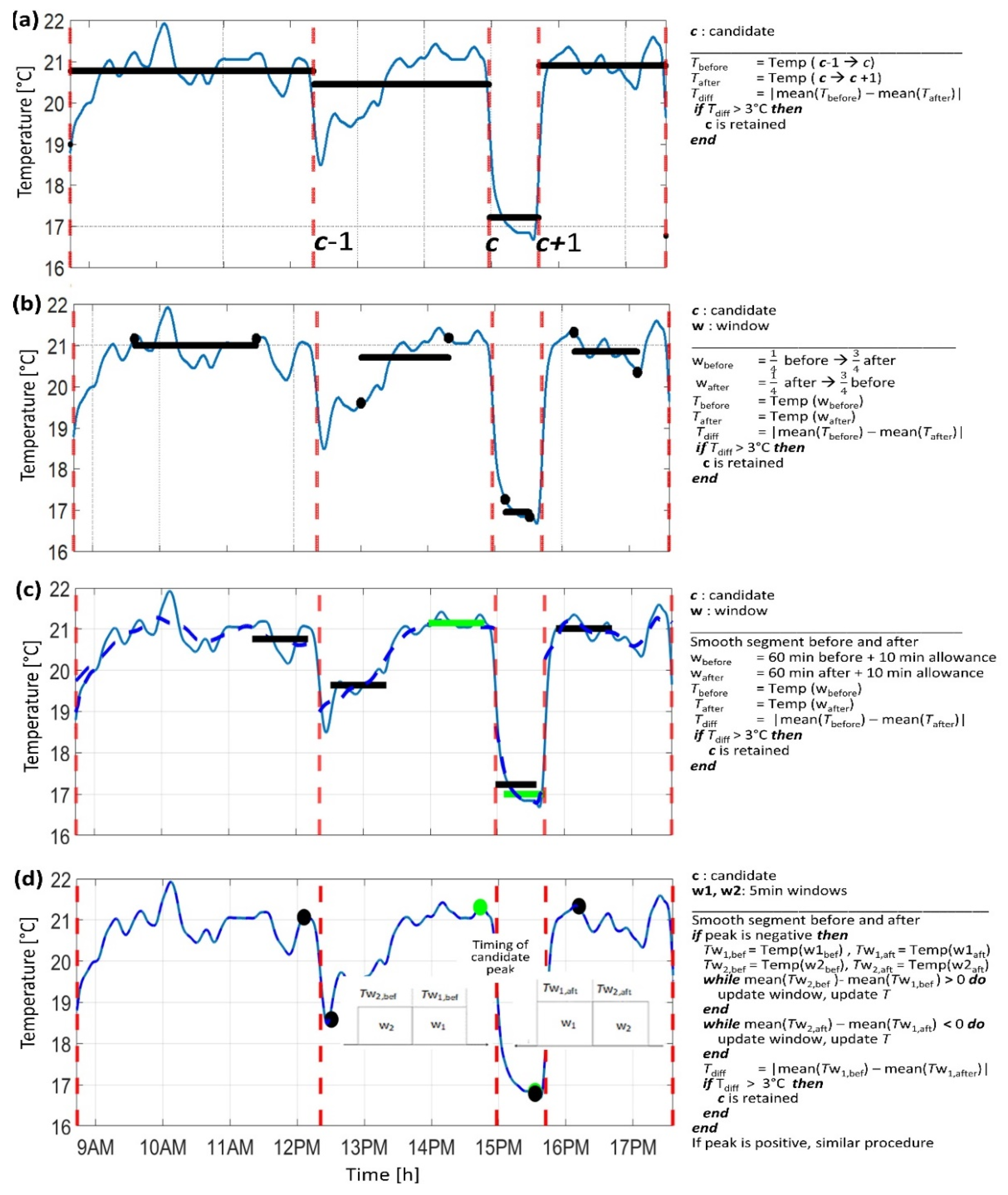
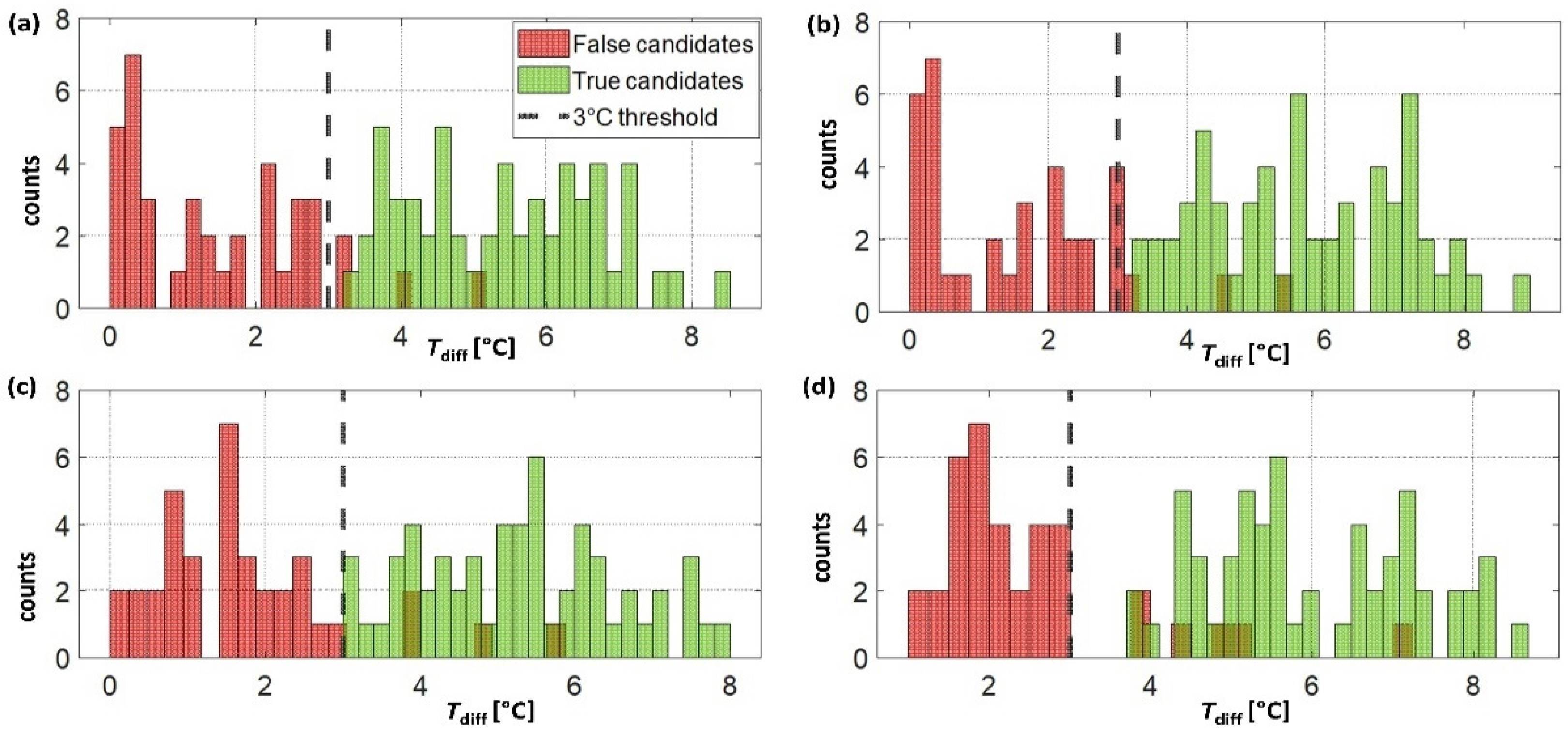
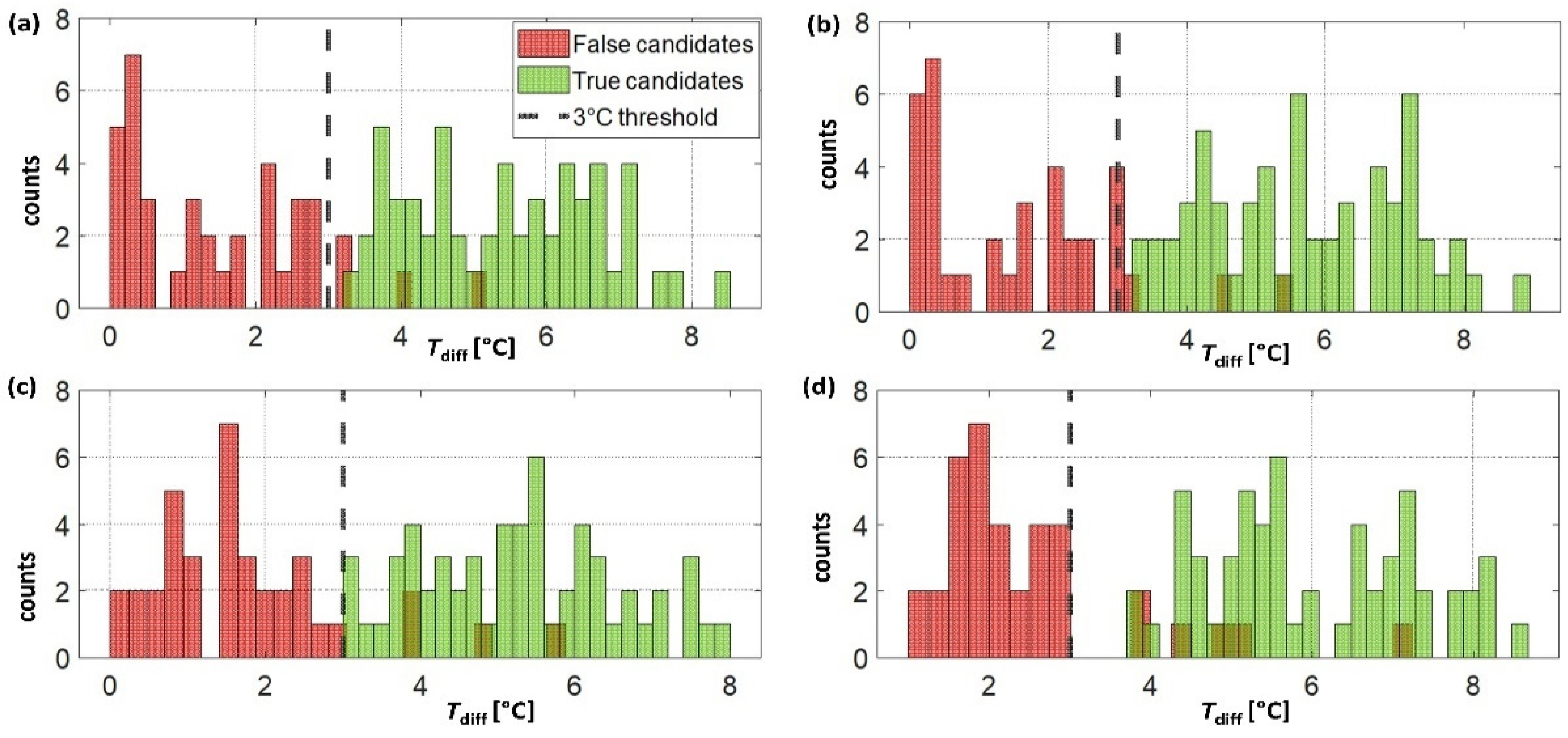
Optimal parameter settings: The most critical parameters were those associated with the event- and temperature-based algorithms, especially the consideration of a minimum 3 °C difference in the temperature levels, which was necessary to classify the “event” as wear/non-wear (i.e., sensor attached/removed). The distribution of temperature differences before and after a peak in the derivative of the temperature signal indicated which value was more appropriate. In particular, the method using two bi-directional moving average windows (
Figure 4d, option 4) showed a clearer distinction between false and actual non-wear (sensor removal) events (see
Figure 5d). This suggests that this method is more suitable for estimating and discriminating between relevant temperature jumps in noisy fluctuations. Finally, the scanning windows estimated from the thermal response of the temperature sensor performed adequately. In particular, the 5 min window was able to accurately estimate the mean on a short window without being affected by noise (i.e., small variations).
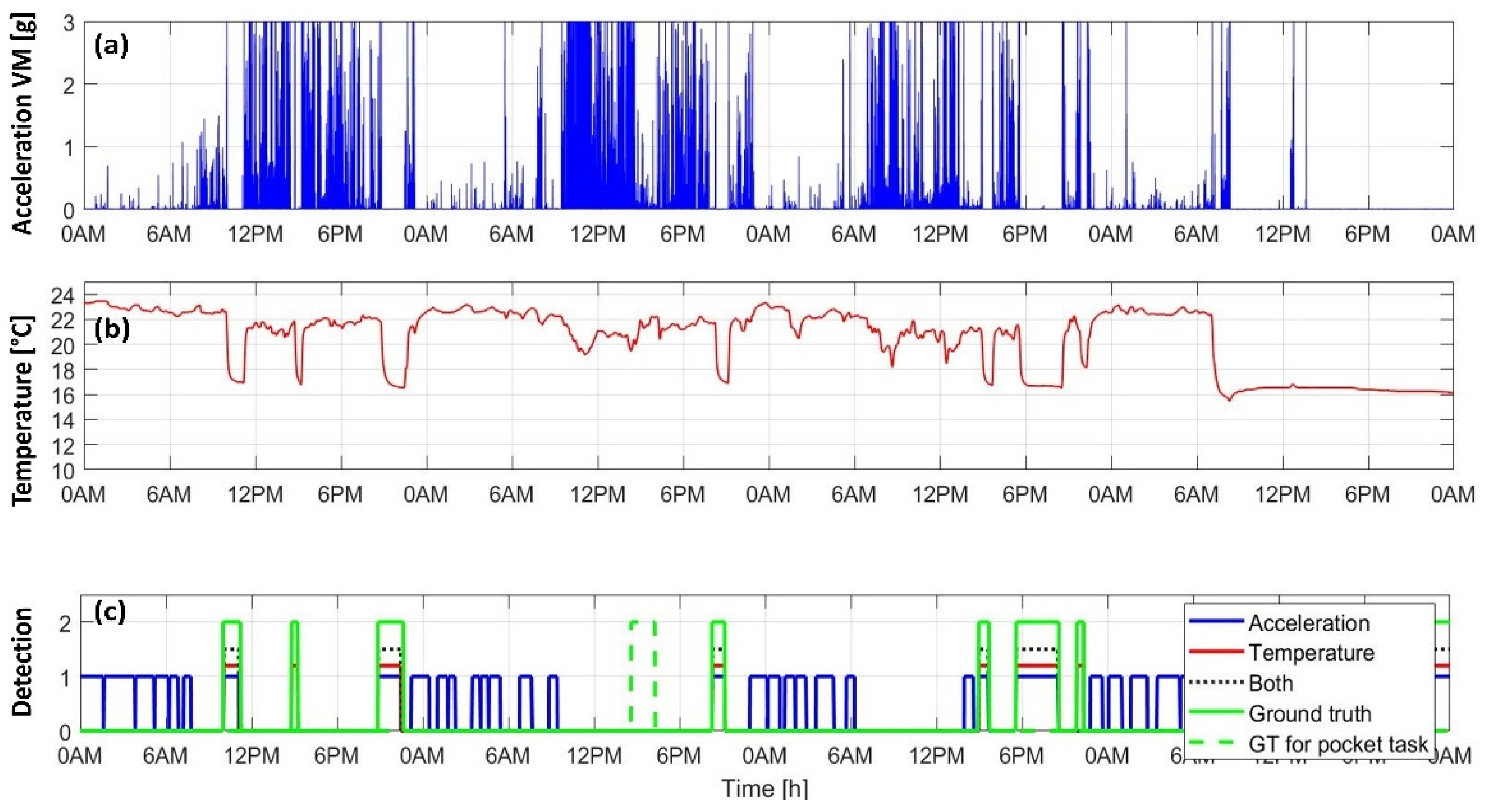
Acceleration- vs. temperature-based methods: The common acceleration-based method appeared more prone to false positive errors compared to temperature-based algorithms. As can be observed in
Figure 6, the acceleration-based algorithm frequently detected non-wear periods outside of the ranges covered by the ground truth vector. Moreover, those misclassified events often occurred during nighttime. The difficulty of finding an appropriate algorithm that can discriminate between sleep, sedentary behaviors, and non-wear periods has been highlighted in several studies [
1,
2,
3,
4,
5,
6,
7,
8,
10]. The event- and temperature-based algorithms overcome this issue, as the classification depends on the proximity of the sensor to the body only. The temperature signal recorded during sleep and sedentary behaviors is characterized by higher values compared to non-wear, making the distinction easier and, thus, more reliable.
Regarding the temperature-based algorithms, the critical aspect affecting the performances was the exact detection of timing of the non-wear/wear onset and the delay associated with sensor response time. Due to the slow response time of the temperature sensor, the temperature derivative peaks appeared in the middle of a slope and not at the beginning nor end of the temperature decrease or increase. However, this accounts for small errors when classification is applied to long-term recorded sensor data. An additional critical aspect was the appropriate downsampling of the recorded temperature signal necessary to enhance the peaks in the derivative signal. For the Axivity device, the optimal downsampling (1/6) was selected based on the temperature sensor specifications (datasheet). Therefore, this might not be the optimal ratio for wearable devices including other types of temperature sensors. However, the algorithm could be easily adapted if sensor specifications are available.
When the output of acceleration-based and temperature-based algorithms were combined (“AND” operator), the performances were influenced by the inaccuracies of the acceleration-based algorithm. For an epoch to be classified as non-wear, it needed to be present in both cases. The useful aspect is that false positives that occur in one method or the other are ignored. The event-based temperature algorithm demonstrated encountering very few false positives and, in most of the cases, they were not corrected by the combination method. It would be interesting to investigate other aggregation (sensor fusion) methods in future studies.
As expected, the periods during which the sensor was worn in a different body location (e.g., in the pocket) were identified as “worn”, even by temperature-based algorithms due to the close vicinity to the body. As a general comment, most PA analysis algorithms consider that data are recorded at a specified body location; therefore, in such situations the pre-processing stage should include, in addition to non-wear, the detection of device location. Although interesting, the identification of how/where the device is worn during the monitoring period is a topic beyond the scope of the current study.
Progress beyond the state of the art: In Duncan et al.’s study [
8], non-wearing detection was based on a dynamic threshold around 18 °C (
absolute temperature threshold). As expected, when applied to the data set recorded in our study in a different geographic area (Norway in our study, New Zealand in [
8]), the algorithm performance decreased considerably, especially in terms of specificity. The dynamic adjustment helped to shift the threshold to the middle of the temperature distribution (see
Figure 2) and to distinguish better between low and high values. However, as the 18 °C starting point was not adapted to the current data, the new threshold was sometimes less optimal and captured some undesired fluctuations.
In more general terms, the use of a
relative temperature threshold brings several potential advantages. The most important is that the algorithm may be more robust and more generalizable. An absolute threshold is specific to a particular region and the particular type of temperature sensor integrated into the monitoring device. For example, Zhou et al. [
3] set a threshold at 26 °C using data recorded with a GENEActiv device, but this threshold was not appropriate for the Axivity device, as the absolute temperature range was lower. Both studies also pointed out that modifications were needed in order for the algorithms to work in different countries [
3,
8]. In contrast, the new method developed in the current study offers more flexibility and robustness, as it only depends on the relative temperature change. However, more extensive validation studies and data are necessary to confirm the generalizability of the results obtained in our study. Another interesting aspect is the increased specificity of our algorithm compared to the one used by Zhou et al. [
3]. Indeed, the method described in [
3] did not exceed ~65% specificity when the temperature algorithm was tested alone, compared to the 97% reached in the current study. This indicates that the event- and temperature-based algorithm with a relative threshold is more suited to identify non-wear transitions.
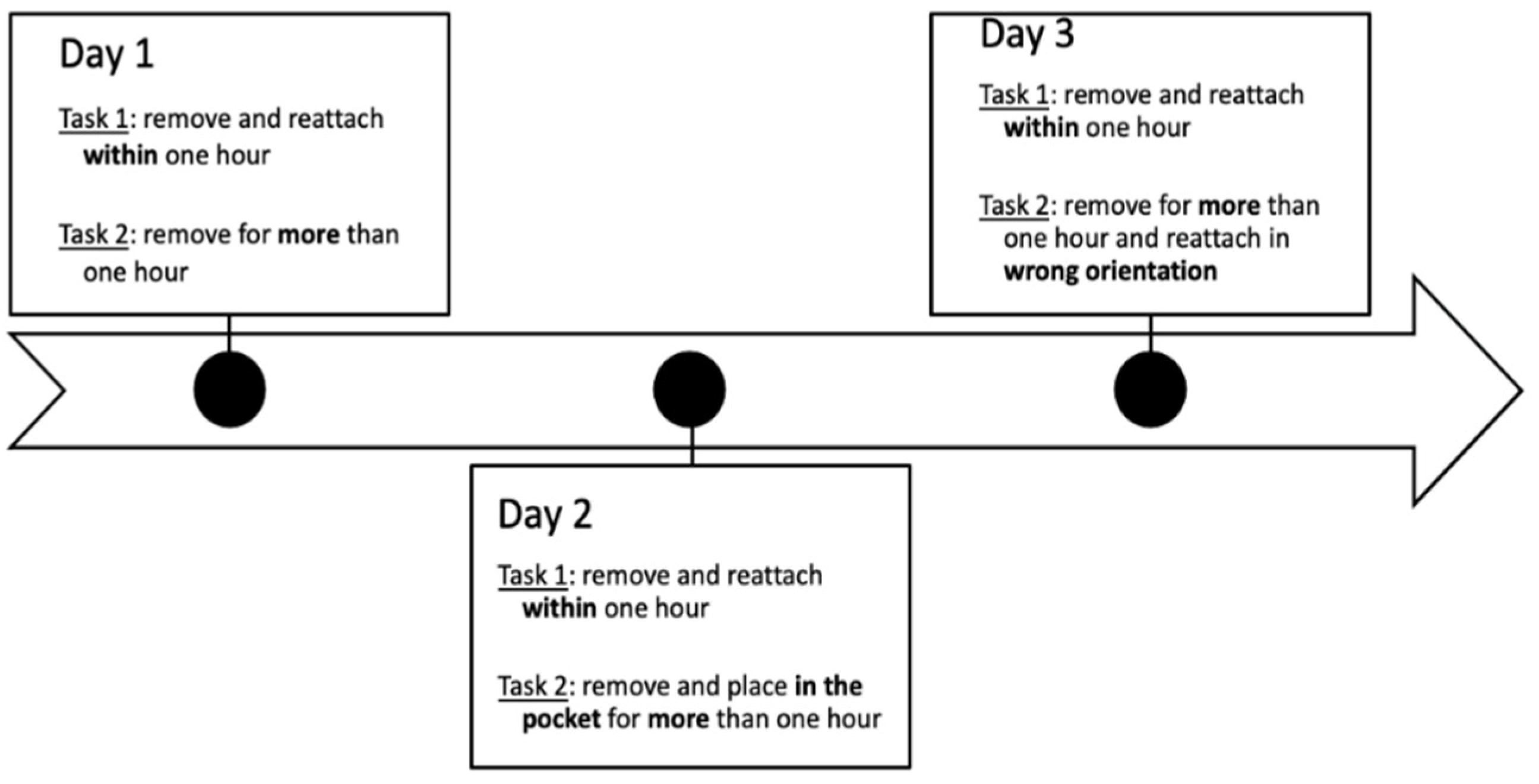
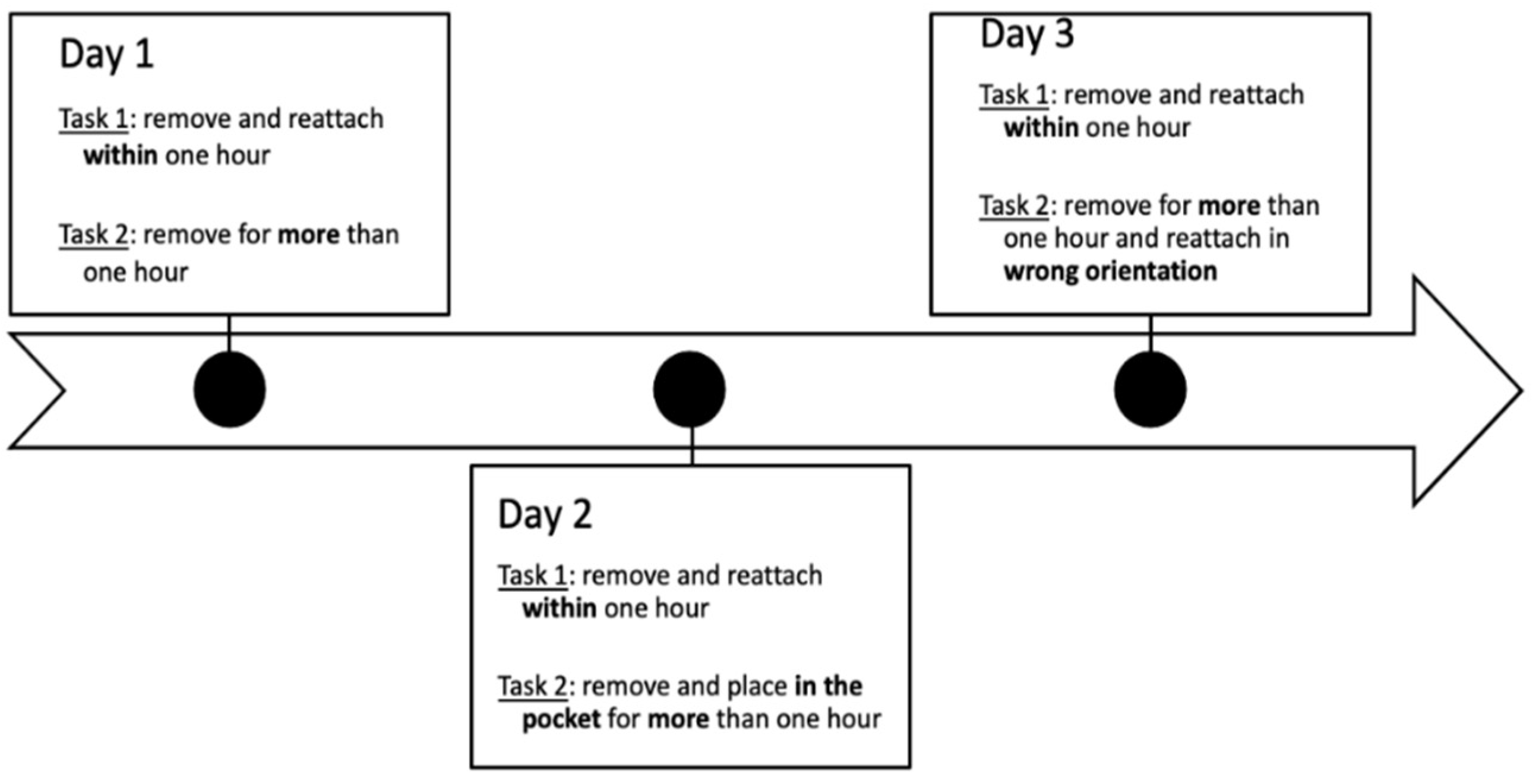
Future research perspectives: To ensure the quality of the validation data, the participants were healthy volunteers, having various daily activity patterns (active, sedentary), and were able to strictly follow the monitoring protocol (tasks execution, detailed diary). An extended validation of the algorithm(s) in other populations (e.g., frail older adults, chronic diseases/pain) might be interesting, provided that reliable ground truth data could be collected.
Clinical/epidemiological studies use various monitoring settings, for example, data recorded with various devices, on different body segments (lower back, chest, wrist, thigh, and ankle) and fixation modalities (e.g., on skin, belt, watch). Therefore, an important perspective of the current study is to evaluate the performances of temperature-based non-wear detection algorithms on data recorded in such alternative settings.
Finally, the algorithms described use an approach based on signal processing and data-driven decision rules. Alternative methods, using features extracted from the temperature/acceleration signals and machine learning-based classifiers [
10] could be investigated as well in future studies, if larger amounts of data (with the ground truth) are available for development of the classification models.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}