
Autonomous Quadcopter Landing on a Moving Target


Abstract
1. Introduction
Contributions
- A fully autonomous PP-based guidance implementation with vision in the loop for time-efficient landing on moving targets, which descends and tracks the target simultaneously as opposed to track and vertical land approaches. The guidance approach is integrated with a log-polynomial function based closing velocity controller.
- We add AprilTags to our landing target design and use AprilTag detection in addition to color-based object segmentation for detecting the landing pad. The proposed landing pad consists of AprilTags of multiple sizes and a logic is developed that switches between the two detection methods (blob detection and AprilTag detection) to accurately detect the landing pad from varying altitudes. A Kalman filter is used for target state estimation.
- This work leverages the analysis of the controller’s parameter characterization based on different speed profiles presented in [45] for automatic initialization of the controller’s parameters, based on the initial estimate of target’s velocity. Thus, the approach does not rely on any prior knowledge of the target motion or trajectory.Also, the approach does not rely on any active sensor data being communicated from target to the aerial drone system about its state (position and velocity).
- We demonstrate the performance of the proposed guidance law through realistic simulations for different target speeds and trajectories.
- We evaluate the robustness of the approach through extensive real-world experiments on off the shelf 3DR solo quadrotor platform. We perform a total of 27 experiment runs, with scenarios consisting of straight line as well as random target trajectory along with scenarios of target occlusion.
- Based on the findings of experiment results, we derive a a lower bound for vertical velocity of the UAV using the proposed controller so as to consistently maintain the visibility of the target so as to extend the approach for higher speed landing targets.
2. Materials and Methods
2.1. Landing Pad Detection Using Vision
Target State Estimation Using Kalman Filter
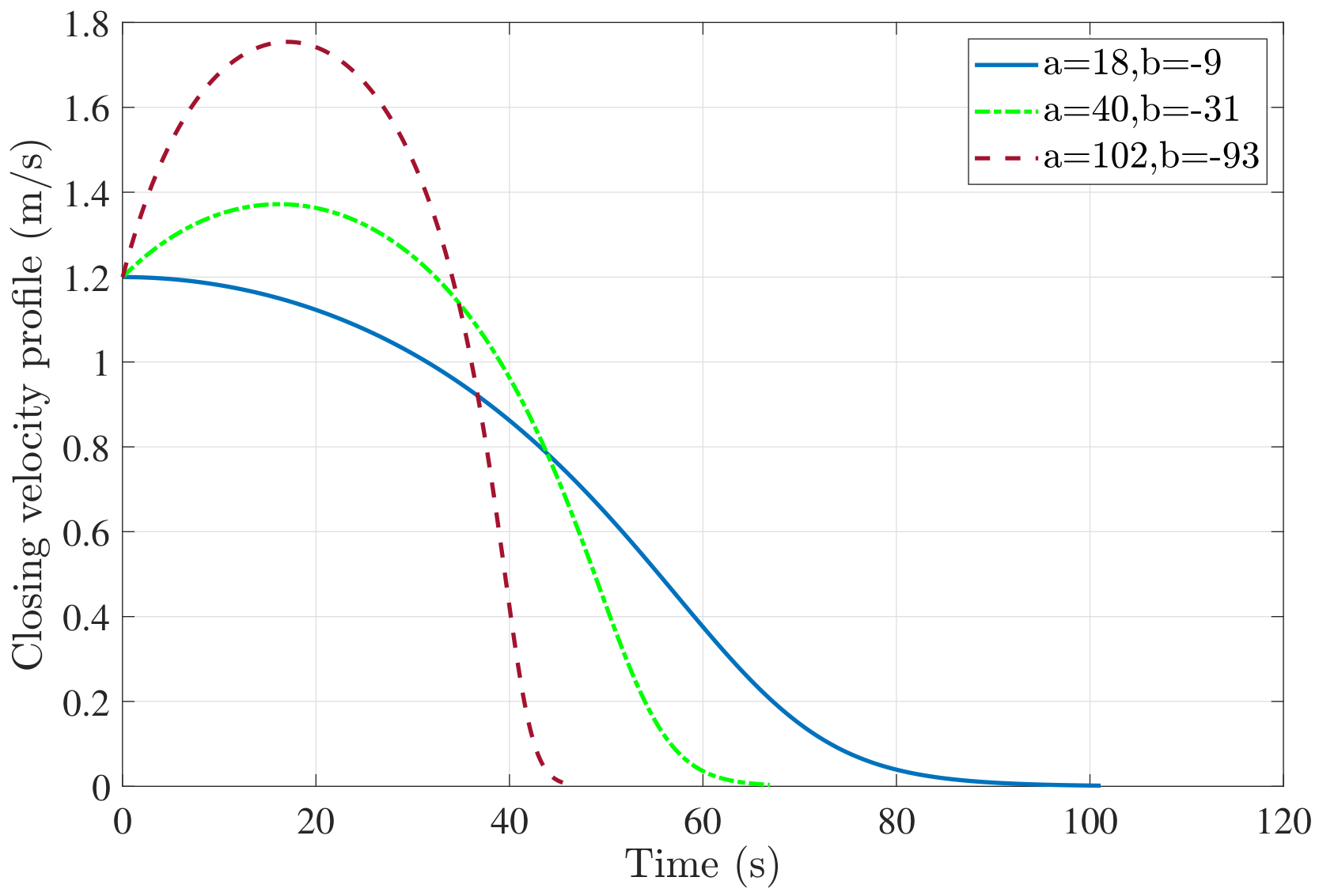
2.2. Log Polynomial Velocity Controller for Autonomous Landing
- It has a slower decay for most of the flight, which makes sure that velocity of the UAV is significantly higher than the target.
- Faster decay towards the end that quickly drives the closing velocity to minimum as the UAV approaches the target.
3. Simulation Results
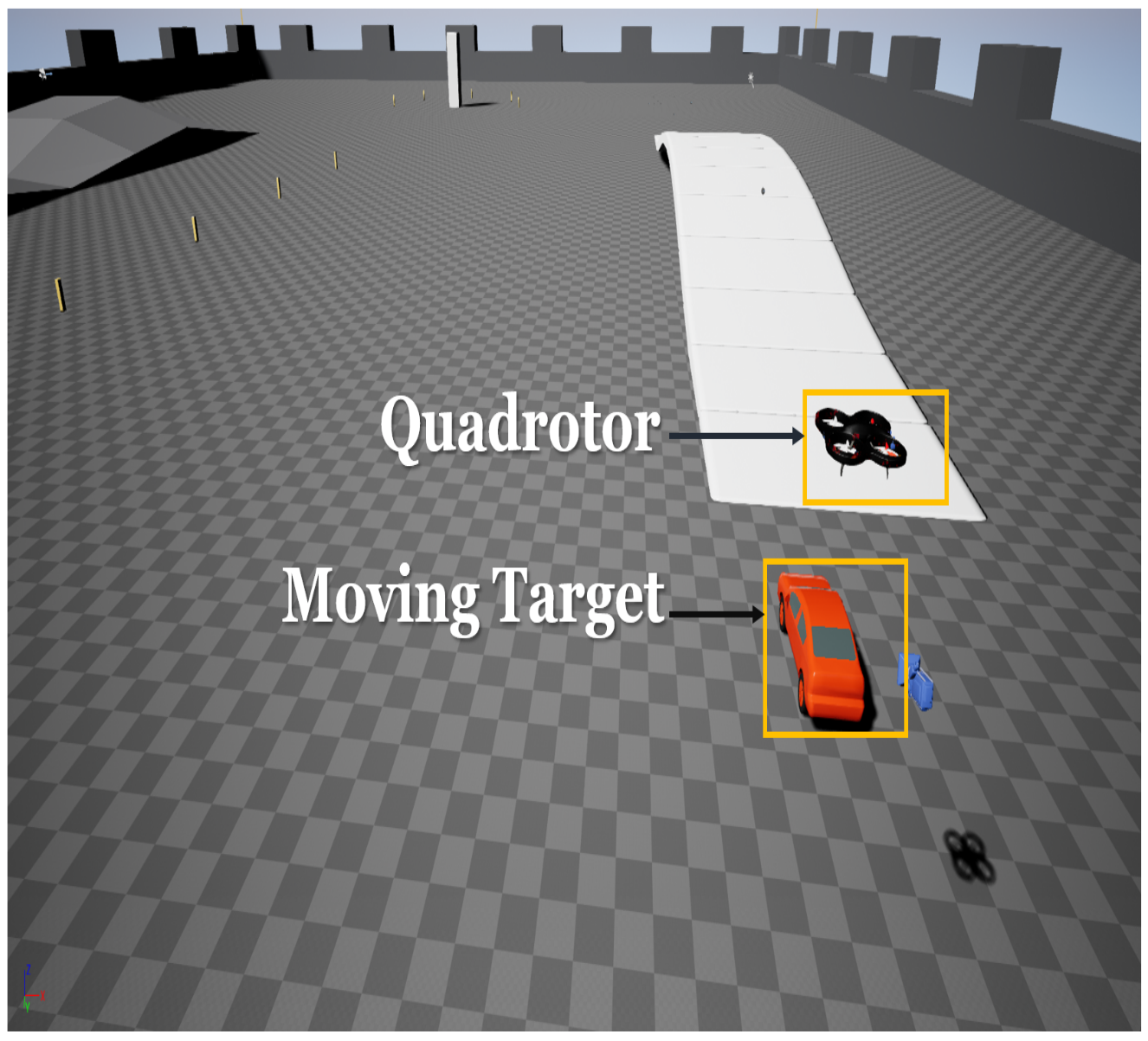
3.1. Simulation Setup
3.2. Landing on a Straight Line Moving Target
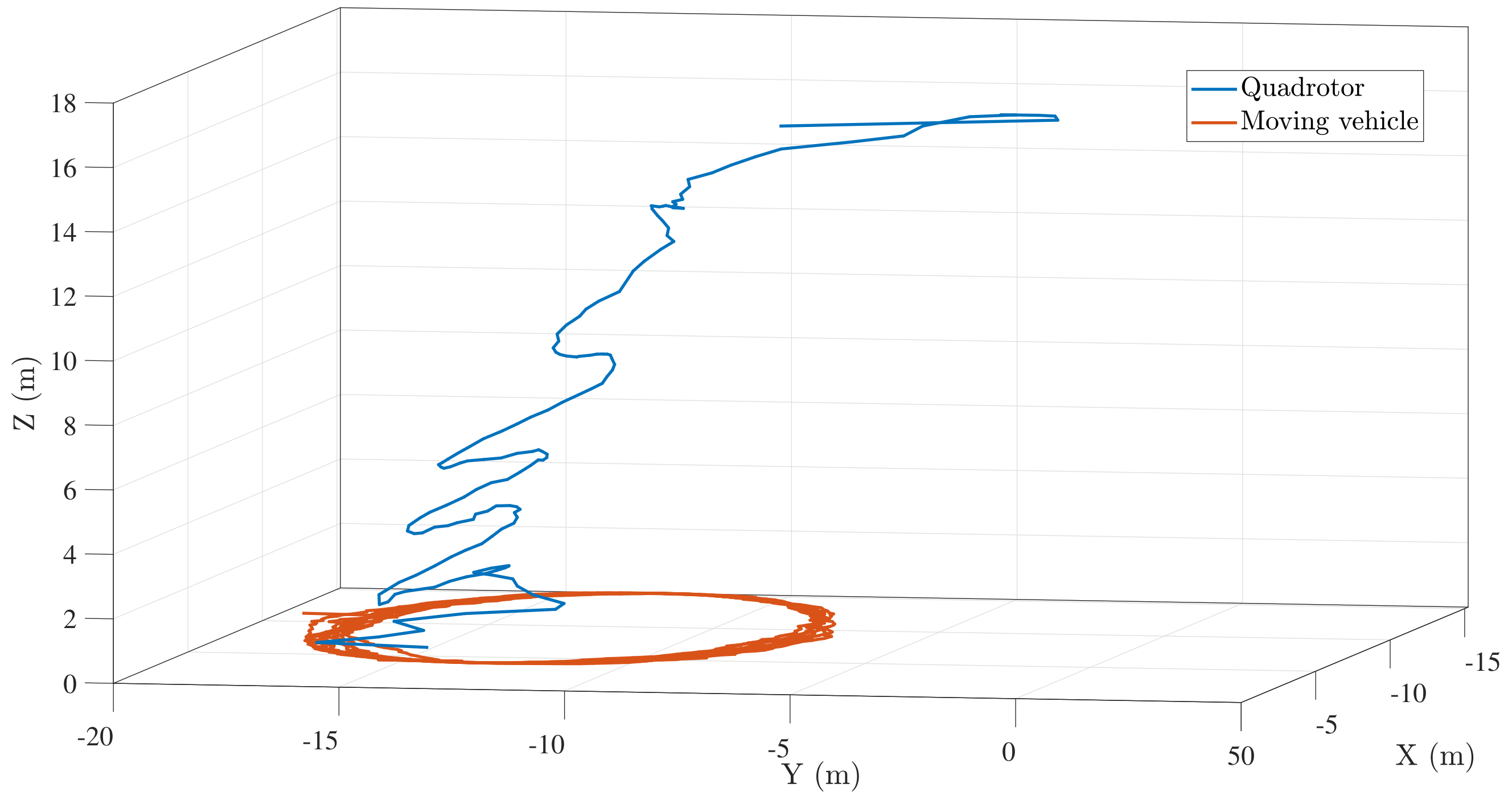
3.3. Landing on a Circular Trajectory Moving Target
3.4. Matlab Simulation Results: Landing with Noise in Target Information
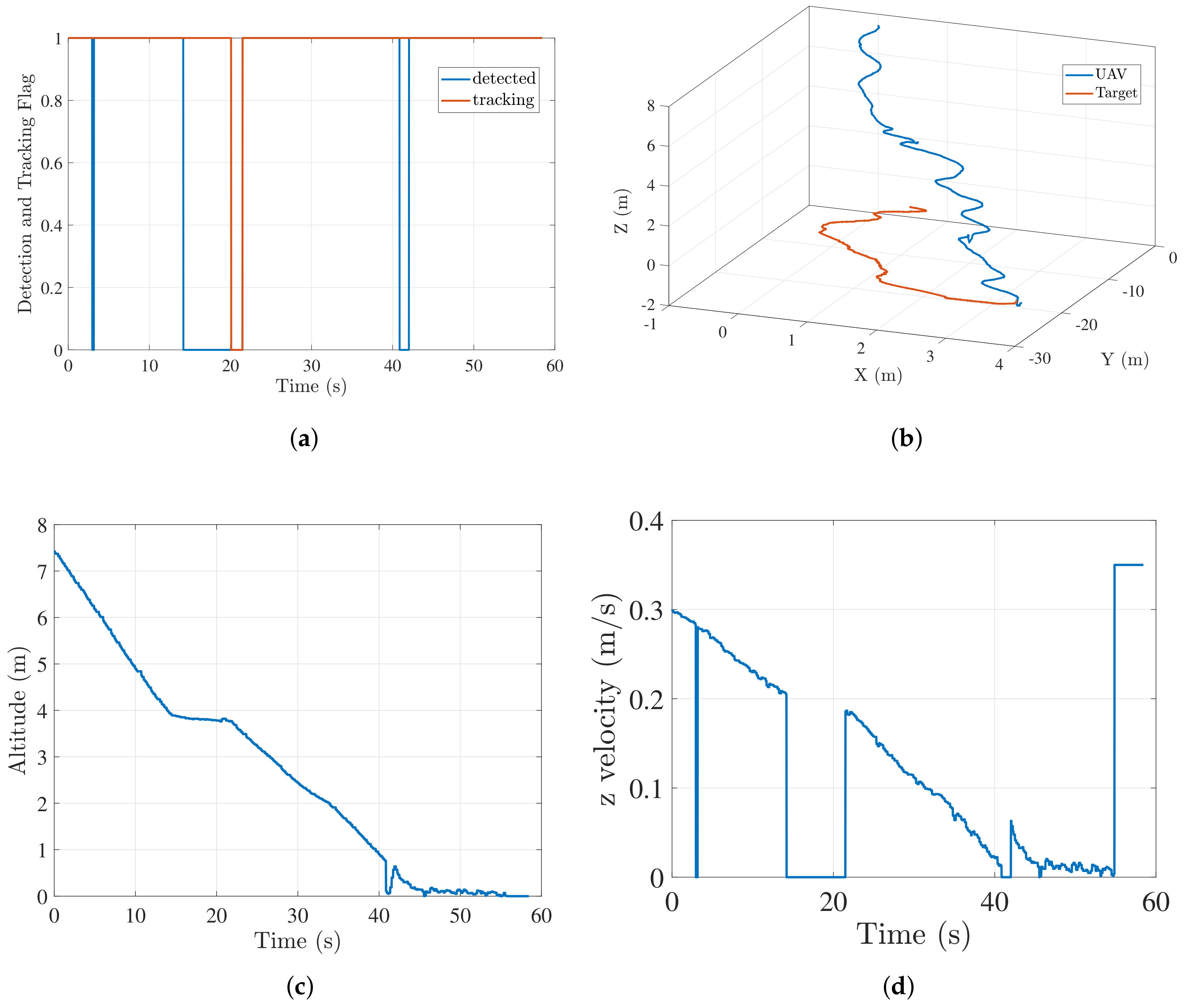
4. Experimental Results
4.1. Landing System Architecture
4.2. Landing on Moving Target
4.2.1. Straight Line Target Motion
4.2.2. Target Moving in a Random Trajectory
4.2.3. Landing on a Moving Target with Midflight Occlusion
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Basics of Pure Pursuit (PP) Guidance
Appendix A.1. 2D Pure Pursuit (PP) Guidance

Appendix A.2. 3D Pure Pursuit Guidance

Appendix B. Proof: Convergence of Closing Velocity to Zero Using Log Polynomial Controller
References
- Geng, L.; Zhang, Y.F.; Wang, J.J.; Fuh, J.Y.H.; Teo, S.H. Mission planning of autonomous UAVs for urban surveillance with evolutionary algorithms. In Proceedings of the IEEE International Conference on Control and Automation, Hangzhou, China, 12–14 June 2013; pp. 828–833. [Google Scholar]
- Tokekar, P.; Hook, J.V.; Mulla, D.; Isler, V. Sensor planning for a symbiotic UAV and UGV system for precision agriculture. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 5321–5326. [Google Scholar]
- Herwitz, S.; Johnson, L.; Dunagan, S.; Higgins, R.; Sullivan, D.; Zheng, J.; Lobitz, B.; Leung, J.; Gallmeyer, B.; Aoyagi, M.; et al. Imaging from an unmanned aerial vehicle: Agricultural surveillance and decision support. Comput. Electron. Agric. 2004, 44, 49–61. [Google Scholar] [CrossRef]
- Waharte, S.; Trigoni, N. Supporting Search and Rescue Operations with UAVs. In Proceedings of the International Conference on Emerging Security Technologies, Canterbury, UK, 6–7 September 2010; pp. 142–147. [Google Scholar]
- Cesetti, A.; Frontoni, E.; Mancini, A.; Zingaretti, P.; Longhi, S. A Vision-Based Guidance System for UAV Navigation and Safe Landing using Natural Landmarks. In International Symposium on UAVs; Valavanis, K.P., Beard, R., Oh, P., Ollero, A., Piegl, L.A., Shim, H., Eds.; Springer: Dordrecht, The Netherlands, 2010; pp. 233–257. [Google Scholar]
- Skulstad, R.; Syversen, C.; Merz, M.; Sokolova, N.; Fossen, T.; Johansen, T. Autonomous net recovery of fixed-wing UAV with single-frequency carrier-phase differential GNSS. IEEE Aerosp. Electron. Syst. Mag. 2015, 30, 18–27. [Google Scholar] [CrossRef]
- Falanga, D.; Zanchettin, A.; Simovic, A.; Delmerico, J.; Scaramuzza, D. Vision-based autonomous quadrotor landing on a moving platform. In Proceedings of the IEEE International Symposium on Safety, Security and Rescue Robotics, Shanghai, China, 11–13 October 2017; pp. 11–13. [Google Scholar]
- Wang, L.; Bai, X. Quadrotor Autonomous Approaching and Landing on a Vessel Deck. J. Intell. Robot. Syst. 2018, 92, 125–143. [Google Scholar] [CrossRef]
- Jin, R.; Owais, H.M.; Lin, D.; Song, T.; Yuan, Y. Ellipse proposal and convolutional neural network discriminant for autonomous landing marker detection. J. Field Robot. 2019, 36, 6–16. [Google Scholar] [CrossRef]
- Arora, S.; Jain, S.; Scherer, S.; Nuske, S.; Chamberlain, L.; Singh, S. Infrastructure-free shipdeck tracking for autonomous landing. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 323–330. [Google Scholar]
- Iwakura, D.; Wang, W.; Nonami, K.; Haley, M. Movable Range-Finding Sensor System and Precise Automated Landing of Quad-Rotor MAV. J. Syst. Des. Dyn. 2011, 5, 17–29. [Google Scholar] [CrossRef][Green Version]
- Herissé, B.; Hamel, T.; Mahony, R.; Russotto, F.X. Landing a VTOL Unmanned Aerial Vehicle on a Moving Platform Using Optical Flow. IEEE Trans. Robot. 2012, 28, 77–89. [Google Scholar] [CrossRef]
- Jung, Y.; Bang, H.; Lee, D. Robust marker tracking algorithm for precise UAV vision-based autonomous landing. In Proceedings of the International Conference on Control, Automation and Systems, Busan, Korea, 13–16 October 2015; pp. 443–446. [Google Scholar]
- Saripalli, S.; Montgomery, J.F.; Sukhatme, G.S. Visually guided landing of an unmanned aerial vehicle. IEEE Trans. Robot. Autom. 2003, 19, 371–380. [Google Scholar] [CrossRef]
- Lange, S.; Sunderhauf, N.; Protzel, P. A vision-based onboard approach for landing and position control of an autonomous multirotor UAV in GPS-denied environments. In Proceedings of the IEEE International Conference on Advanced Robotics, Munich, Germany, 22–26 June 2009; pp. 1–6. [Google Scholar]
- Hoang, T.; Bayasgalan, E.; Wang, Z.; Tsechpenakis, G.; Panagou, D. Vision-based target tracking and autonomous landing of a quadrotor on a ground vehicle. In Proceedings of the American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 5580–5585. [Google Scholar]
- Abu-Jbara, K.; Alheadary, W.; Sundaramorthi, G.; Claudel, C. A robust vision-based runway detection and tracking algorithm for automatic UAV landing. In Proceedings of the International Conference on Unmanned Aircraft Systems, Denver, CO, USA, 9–12 June 2015; pp. 1148–1157. [Google Scholar]
- Ghamry, K.A.; Dong, Y.; Kamel, M.A.; Zhang, Y. Real-time autonomous take-off, tracking and landing of UAV on a moving UGV platform. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 1236–1241. [Google Scholar]
- Daly, J.M.; Ma, Y.; Waslander, S.L. Coordinated landing of a quadrotor on a skid-steered ground vehicle in the presence of time delays. Auton. Robot. 2015, 38, 179–191. [Google Scholar] [CrossRef]
- Li, Z.; Meng, C.; Zhou, F.; Ding, X.; Wang, X.; Zhang, H.; Guo, P.; Meng, X. Fast vision-based autonomous detection of moving cooperative target for unmanned aerial vehicle landing. J. Field Robot. 2019, 36, 34–48. [Google Scholar] [CrossRef]
- Serra, P.; Cunha, R.; Hamel, T.; Cabecinhas, D.; Silvestre, C. Landing of a quadrotor on a moving target using dynamic image-based visual servo control. IEEE Trans. Robot. 2016, 32, 1524–1535. [Google Scholar] [CrossRef]
- Lee, D.; Ryan, T.; Kim, H.J. Autonomous landing of a VTOL UAV on a moving platform using image-based visual servoing. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 971–976. [Google Scholar]
- Wynn, J.S.; McLain, T.W. Visual servoing with feed-forward for precision shipboard landing of an autonomous multirotor. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 3928–3935. [Google Scholar]
- Rodriguez-Ramos, A.; Sampedro, C.; Bavle, H.; Milosevic, Z.; Garcia-Vaquero, A.; Campoy, P. Towards fully autonomous landing on moving platforms for rotary unmanned aerial vehicles. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 170–178. [Google Scholar]
- Vlantis, P.; Marantos, P.; Bechlioulis, C.P.; Kyriakopoulos, K.J. Quadrotor landing on an inclined platform of a moving ground vehicle. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2202–2207. [Google Scholar]
- Baca, T.; Stepan, P.; Spurny, V.; Hert, D.; Penicka, R.; Saska, M.; Thomas, J.; Loianno, G.; Kumar, V. Autonomous landing on a moving vehicle with an unmanned aerial vehicle. J. Field Robot. 2019, 36, 874–891. [Google Scholar] [CrossRef]
- Borowczyk, A.; Nguyen, D.T.; Nguyen, A.P.V.; Nguyen, D.Q.; Saussié, D.; Le Ny, J. Autonomous landing of a quadcopter on a high-speed ground vehicle. J. Guid. Control. Dyn. 2017, 40, 2378–2385. [Google Scholar] [CrossRef]
- Gautam, A.; Sujit, P.; Saripalli, S. A survey of autonomous landing techniques for UAVs. In Proceedings of the International Conference on Unmanned Aircraft Systems, Orlando, FL, USA, 27–30 May 2014; pp. 1210–1218. [Google Scholar] [CrossRef]
- Voos, H. Nonlinear control of a quadrotor micro-UAV using feedback-linearization. In Proceedings of the IEEE International Conference on Mechatronics, Málaga, Spain, 14–17 April 2009; pp. 1–6. [Google Scholar]
- Ahmed, B.; Pota, H.R. Backstepping-based landing control of a RUAV using tether incorporating flapping correction dynamics. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 2728–2733. [Google Scholar]
- Shue, S.P.; Agarwal, R.K. Design of Automatic Landing Systems Using Mixed H2/H∞ Control. J. Guid. Control. Dyn. 1999, 22, 103–114. [Google Scholar] [CrossRef]
- Malaek, S.M.B.; Sadati, N.; Izadi, H.; Pakmehr, M. Intelligent autolanding controller design using neural networks and fuzzy logic. In Proceedings of the Asian Control Conference, Melbourne, Australia, 20–23 July 2004; Volume 1, pp. 365–373. [Google Scholar]
- Nho, K.; Agarwal, R.K. Automatic landing system design using fuzzy logic. J. Guid. Control. Dyn. 2000, 23, 298–304. [Google Scholar] [CrossRef]
- Mori, R.; Suzuki, S.; Sakamoto, Y.; Takahara, H. Analysis of visual cues during landing phase by using neural network modeling. J. Aircr. 2007, 44, 2006–2011. [Google Scholar] [CrossRef]
- Ghommam, J.; Saad, M. Autonomous landing of a quadrotor on a moving platform. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1504–1519. [Google Scholar] [CrossRef]
- Gautam, A.; Sujit, P.; Saripalli, S. Application of guidance laws to quadrotor landing. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 372–379. [Google Scholar]
- Beard, R.W.; McLain, T.W. Small Unmanned Aircraft: Theory and Practice; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Kim, H.J.; Kim, M.; Lim, H.; Park, C.; Yoon, S.; Lee, D.; Choi, H.; Oh, G.; Park, J.; Kim, Y. Fully Autonomous Vision-Based Net-Recovery Landing System for a Fixed-Wing UAV. IEEE/ASME Trans. Mechatronics 2013, 18, 1320–1333. [Google Scholar] [CrossRef]
- Yoon, S.; Jin Kim, H.; Kim, Y. Spiral Landing Trajectory and Pursuit Guidance Law Design for Vision-Based Net-Recovery UAV. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Chicago, IL, USA, 10–13 August 2009. [Google Scholar] [CrossRef]
- Byoung-Mun, M.; Min-Jea, T.; David Hyunchul, S.; HyoChoong, B. Guidance law for vision-based automatic landing of UAV. Int. J. Aeronaut. Space Sci. 2007, 8, 46–53. [Google Scholar]
- Barber, D.B.; Griffiths, S.R.; McLain, T.W.; Beard, R.W. Autonomous landing of miniature aerial vehicles. J. Aerosp. Comput. Inform. Commun. 2007, 4, 770–784. [Google Scholar] [CrossRef]
- Huh, S.; Shim, D.H. A Vision-Based Automatic Landing Method for Fixed-Wing UAVs. In Selected Papers from the 2nd International Symposium on UAVs, Reno, Nevada, USA, 8–10 June 2009; Valavanis, K.P., Beard, R.O.P.O.A., Piegl, L.A., Shim, H., Eds.; Springer: Dordrecht, The Netherlands, 2010; pp. 217–231. [Google Scholar]
- Gautam, A.; Sujit, P.; Saripalli, S. Autonomous Quadrotor Landing Using Vision and Pursuit Guidance. IFAC-PapersOnLine 2017, 50, 10501–10506. [Google Scholar] [CrossRef]
- Gautam, A.; Sujit, P.; Saripalli, S. Vision Based Robust Autonomous Landing of a Quadrotor on a Moving Target. In International Symposium on Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2018; pp. 96–105. [Google Scholar]
- Gautam, A.; Ratnoo, A.; Sujit, P. Log Polynomial Velocity Profile for Vertical Landing. J. Guid. Control. Dyn. 2018, 41, 1617–1623. [Google Scholar] [CrossRef]
- Olson, E. AprilTag: A robust and flexible visual fiducial system. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3400–3407. [Google Scholar]
- Shah, S.; Dey, D.; Lovett, C.; Kapoor, A. AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles. arXiv 2017, arXiv:1705.05065. [Google Scholar]
- Games, E. Unreal Engine. 2007. Available online: https://www.unrealengine.com (accessed on 27 December 2021).
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. ICRA Workshop Open Source Softw. 2009, 3, 5. [Google Scholar]
- Bradski, G. The OpenCV Library. Dr. Dobb’S J. Softw. Tools 2000, 25, 120–123. [Google Scholar]
- Lee, H.; Jung, S.; Shim, D.H. Vision-based UAV landing on the moving vehicle. In Proceedings of the 2016 International conference on unmanned aircraft systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 1–7. [Google Scholar]
- Chang, C.W.; Lo, L.Y.; Cheung, H.C.; Feng, Y.; Yang, A.S.; Wen, C.Y.; Zhou, W. Proactive Guidance for Accurate UAV Landing on a Dynamic Platform: A Visual–Inertial Approach. Sensors 2022, 22, 404. [Google Scholar] [CrossRef] [PubMed]
- Shneydor, N.A. Missile Guidance and Pursuit: Kinematics, Dynamics and Control; Elsevier: Amsterdam, The Netherlands, 1998. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target Trajectory | No. of Trials | Final Vehicle Distance from Target Center for Successful Trials (in M) | Unsuccessful Landings (Failure Cases) | Best Landing Accuracy | Average Landing Time |
|---|---|---|---|---|---|
| Straight line trajectory, no occlusion | 9 | 7 trials , 2 trials | None | m | 56.5 s |
| Straight line trajectory, with occlusion | 4 | 2 trials , 1 trial | 1 with an absolute error of m | m | 1 min 2 s |
| Random trajectory, no occlusion | 9 | 4 trials , 3 trials | 2 with absolute errors m and m respectively | m | 1 min 38 s |
| Random trajectory, with occlusion | 5 | 3 trials | 2 with absolute errors m m respectively | m | 1min 37 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gautam, A.; Singh, M.; Sujit, P.B.; Saripalli, S. Autonomous Quadcopter Landing on a Moving Target. Sensors 2022, 22, 1116. https://doi.org/10.3390/s22031116
Gautam A, Singh M, Sujit PB, Saripalli S. Autonomous Quadcopter Landing on a Moving Target. Sensors. 2022; 22(3):1116. https://doi.org/10.3390/s22031116
Chicago/Turabian StyleGautam, Alvika, Mandeep Singh, Pedda Baliyarasimhuni Sujit, and Srikanth Saripalli. 2022. "Autonomous Quadcopter Landing on a Moving Target" Sensors 22, no. 3: 1116. https://doi.org/10.3390/s22031116
APA StyleGautam, A., Singh, M., Sujit, P. B., & Saripalli, S. (2022). Autonomous Quadcopter Landing on a Moving Target. Sensors, 22(3), 1116. https://doi.org/10.3390/s22031116