
Component-Wise Error Correction Method for UWB-Based Localization in Target-Following Mobile Robot



Abstract
:1. Introduction
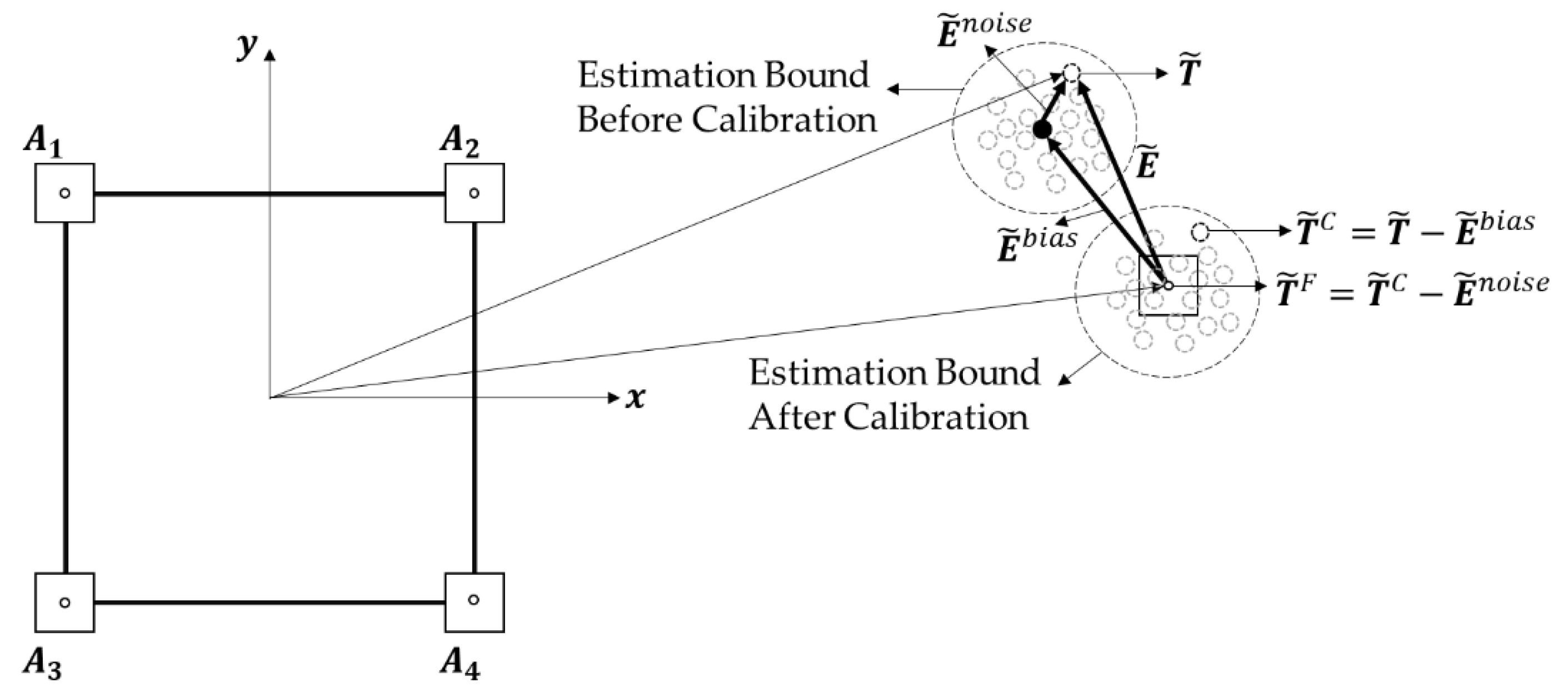
- This study proposes a component-wise error correction method to increase the accuracy of UWB localization based on the in-depth analysis of UWB error characteristics. The core UWB error components are classified into two parts, i.e., bias and noise, and error corrections that fit into each component are proposed.
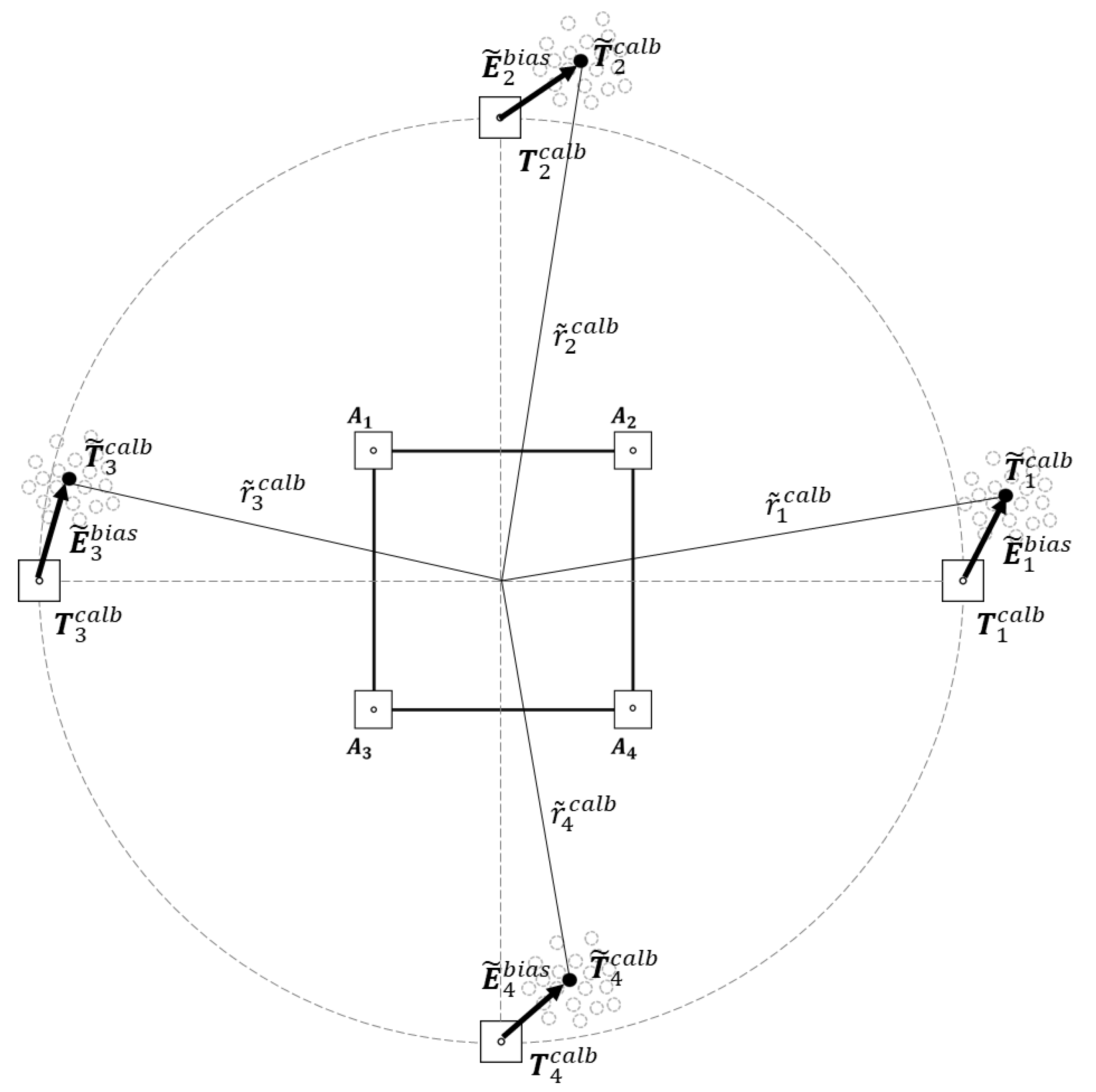
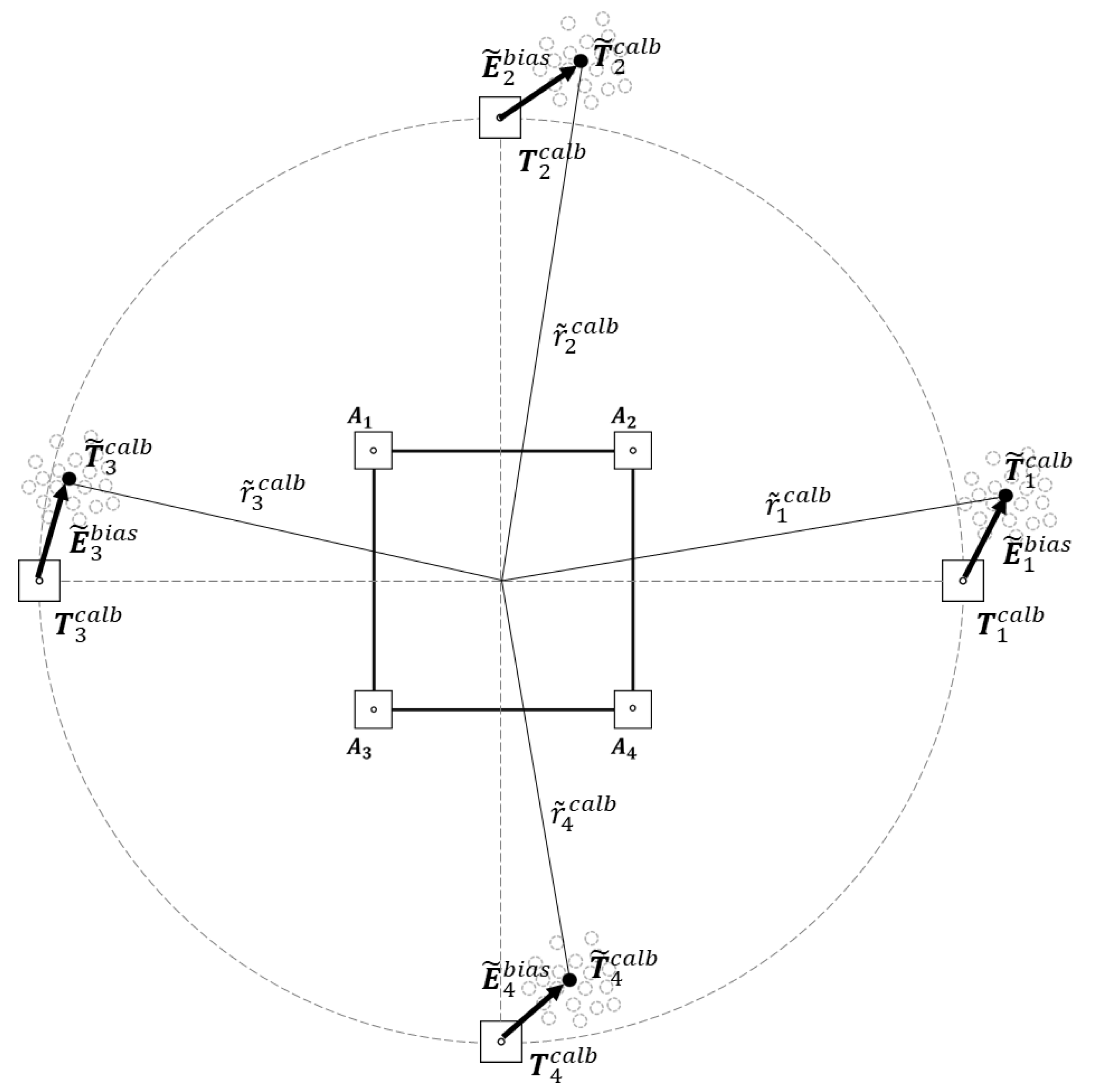
- The sensor calibration is proposed to measure and compensate the device-dependent bias errors, which consistently appear in UWB localization. By conducting the calibration only once in the initialization, it can successfully correct the consistent bias of the localization.
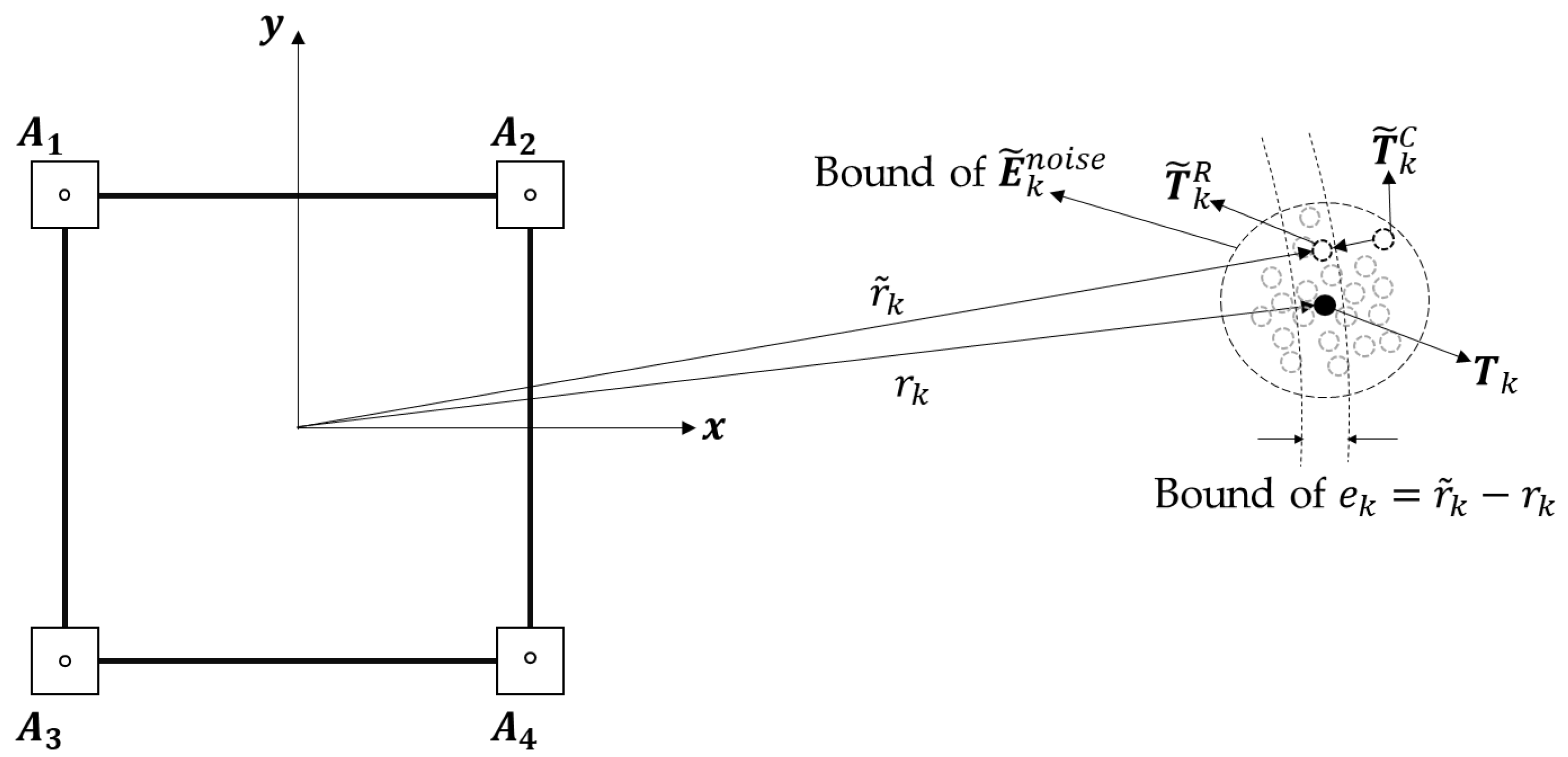
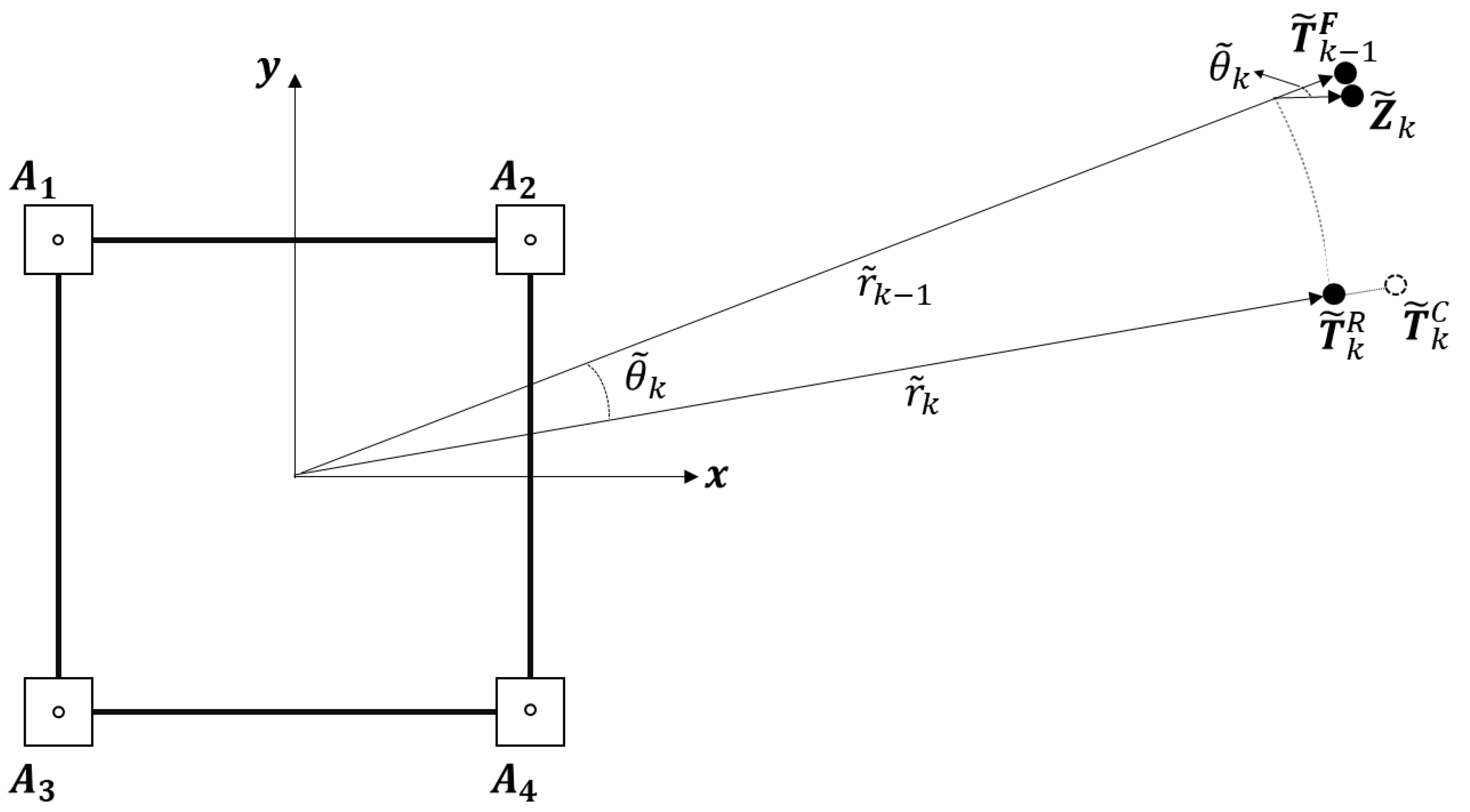
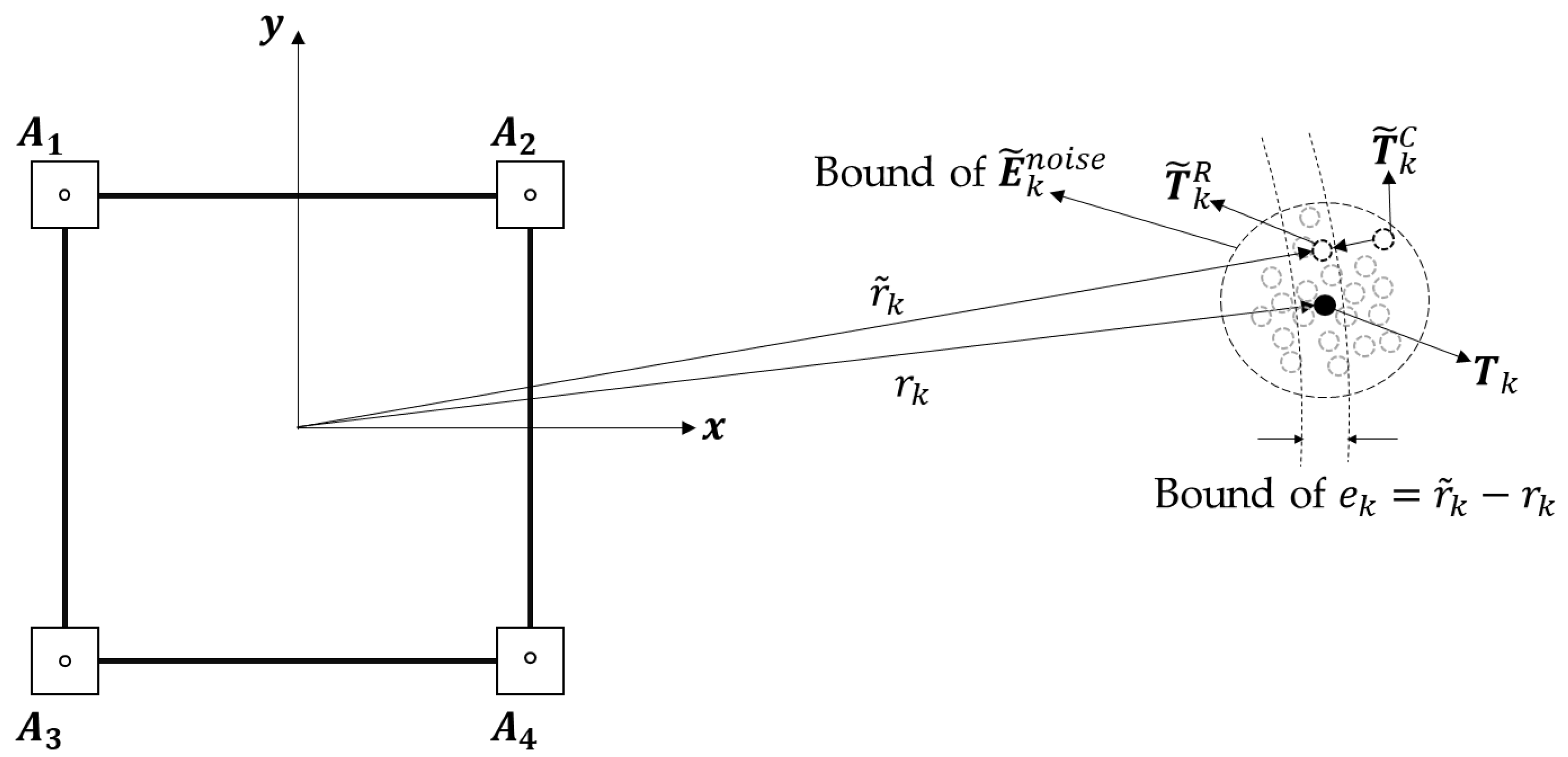
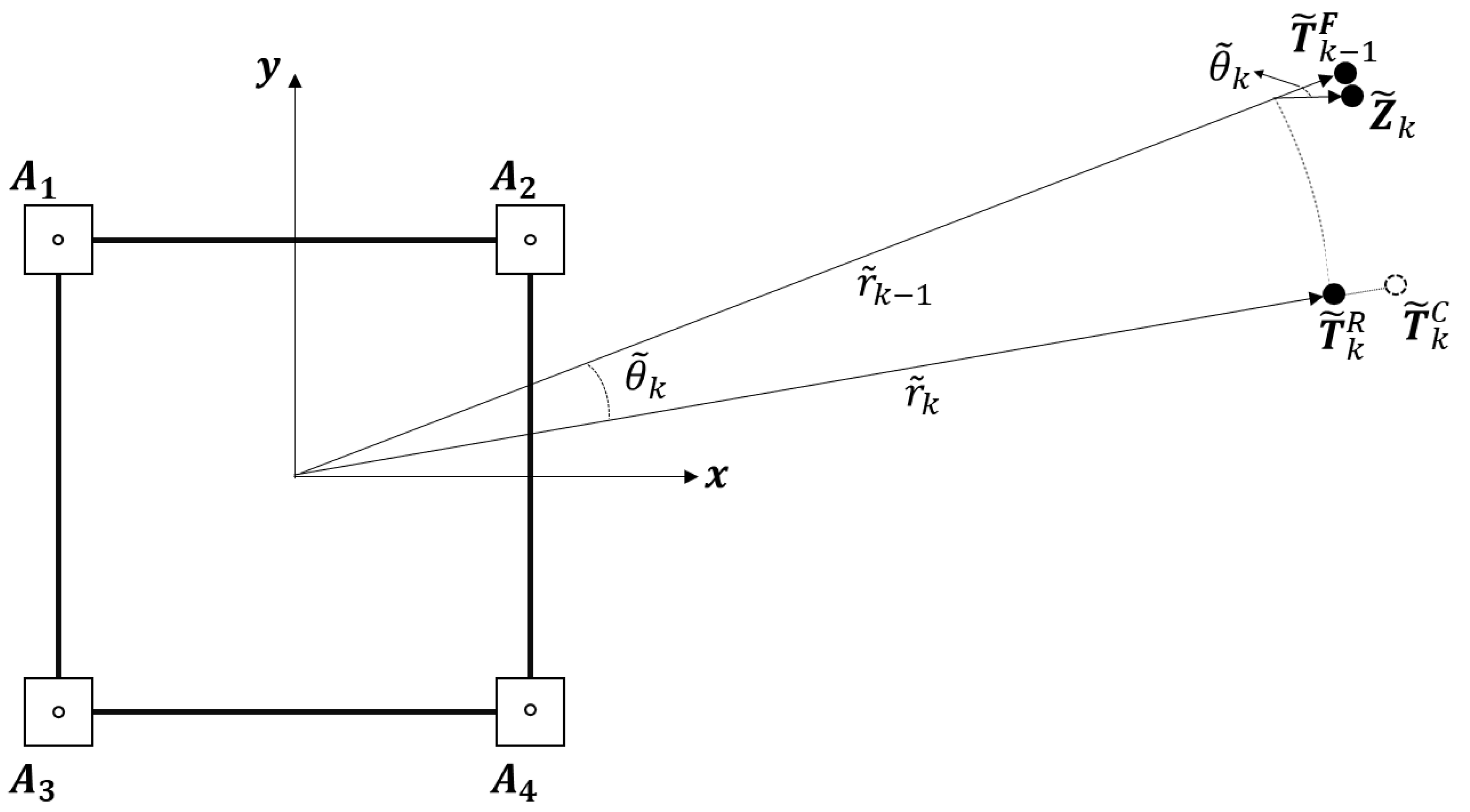
- The interactive complementary filter is proposed to alleviate the high-frequency noise of the localization. Radial and tangential components of the localization noise are significantly reduced by the proposed filter.
2. Materials and Methods
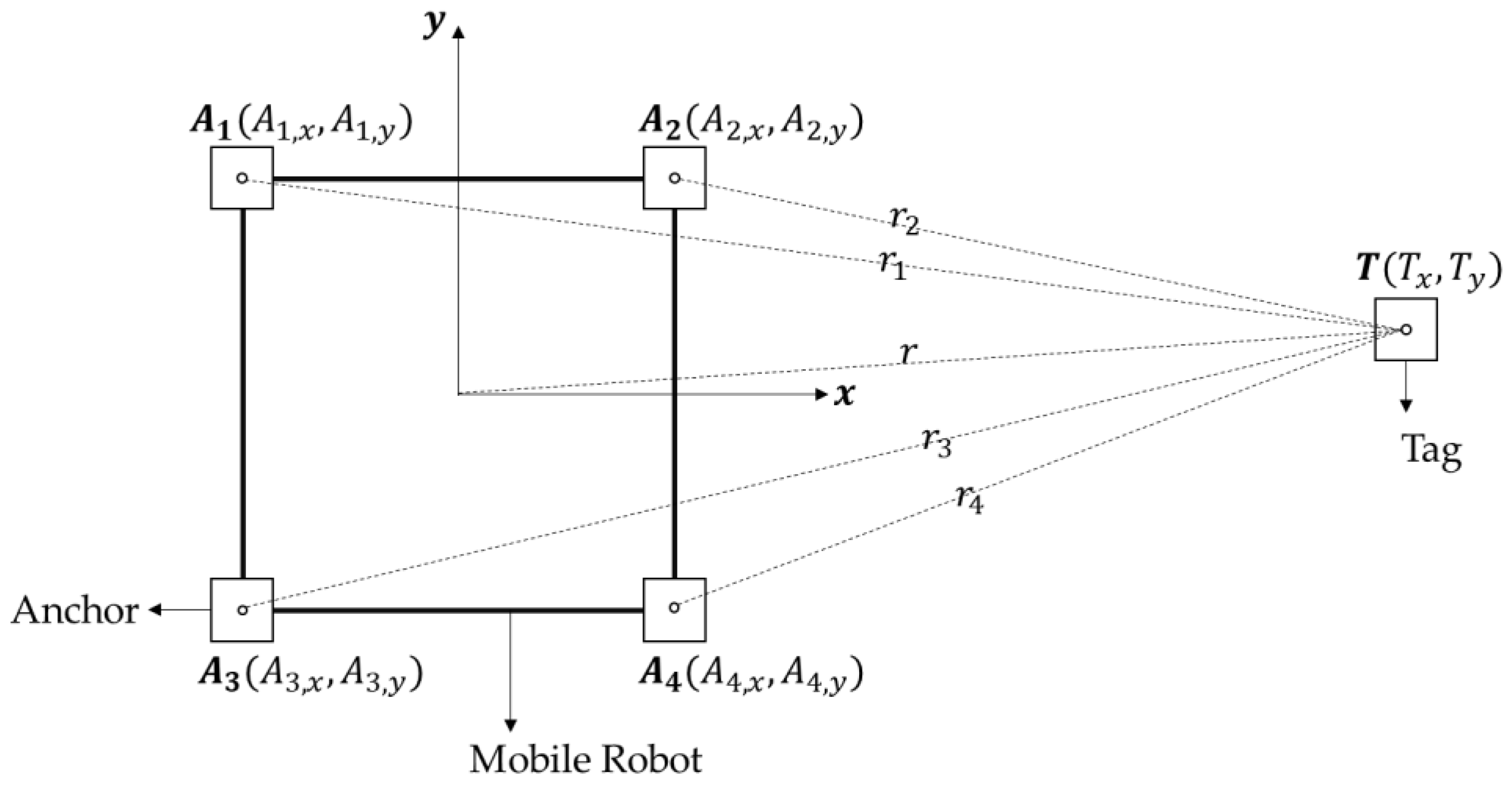
2.1. Target Localization Using Least Square Approximation
2.2. Localization Error Analysis
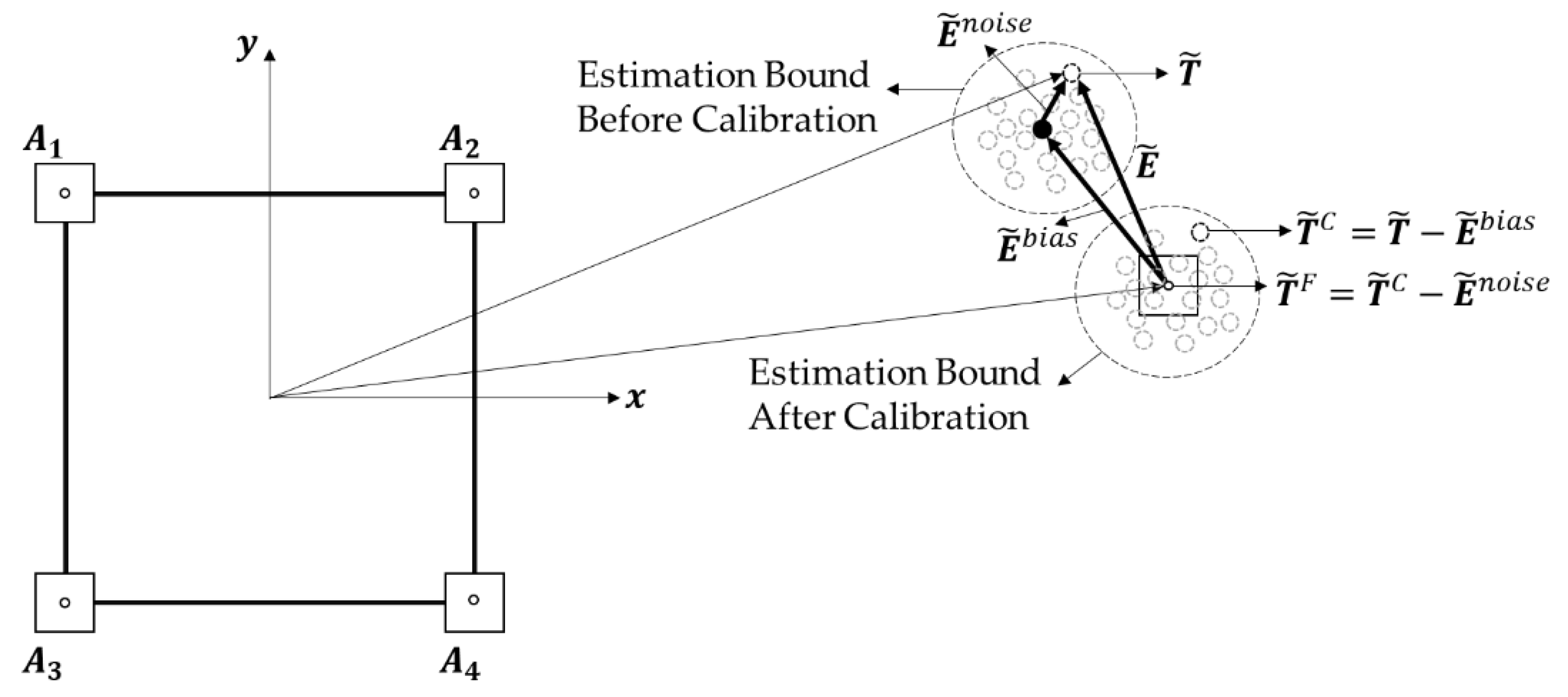
2.3. Component-Wise Estimation Error Correction
2.3.1. Bias Correction through Initial Calibration
2.3.2. Noise Reduction Using Iterative Complementary Filter
3. Results
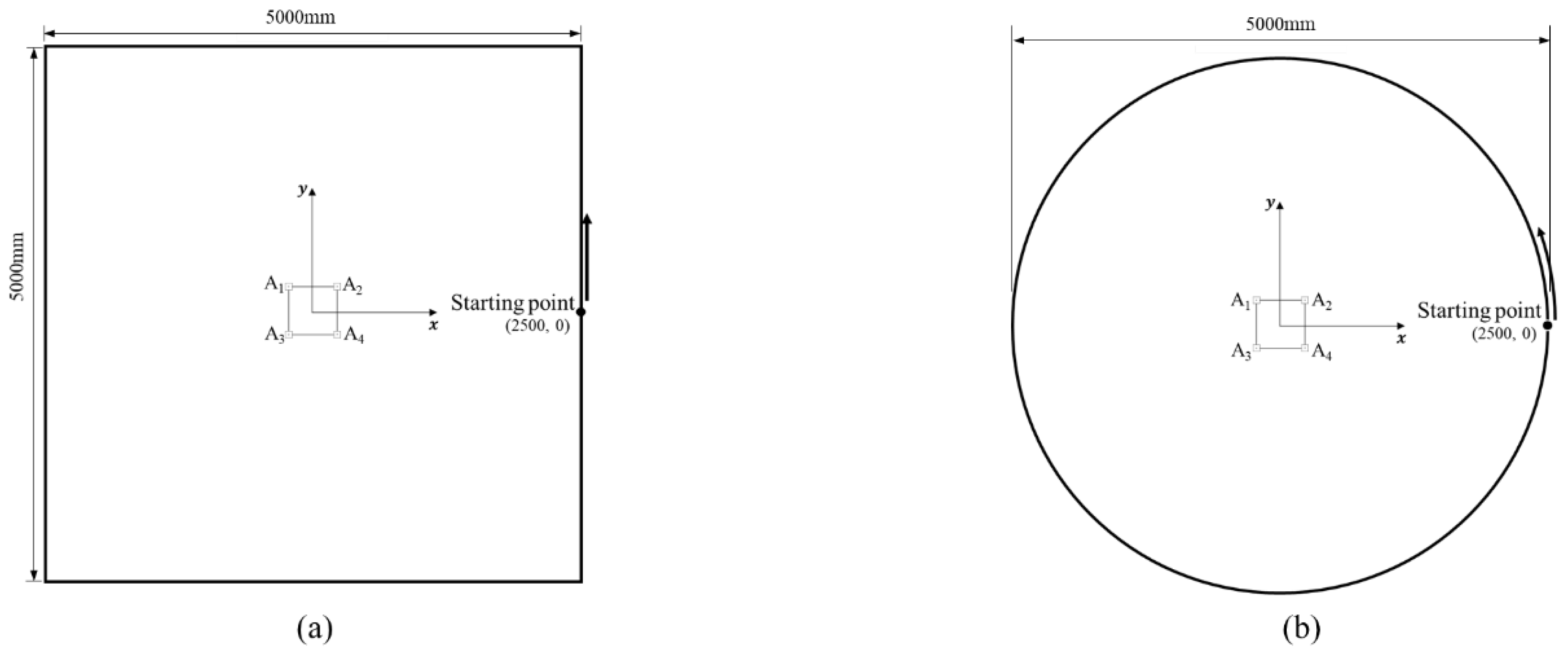
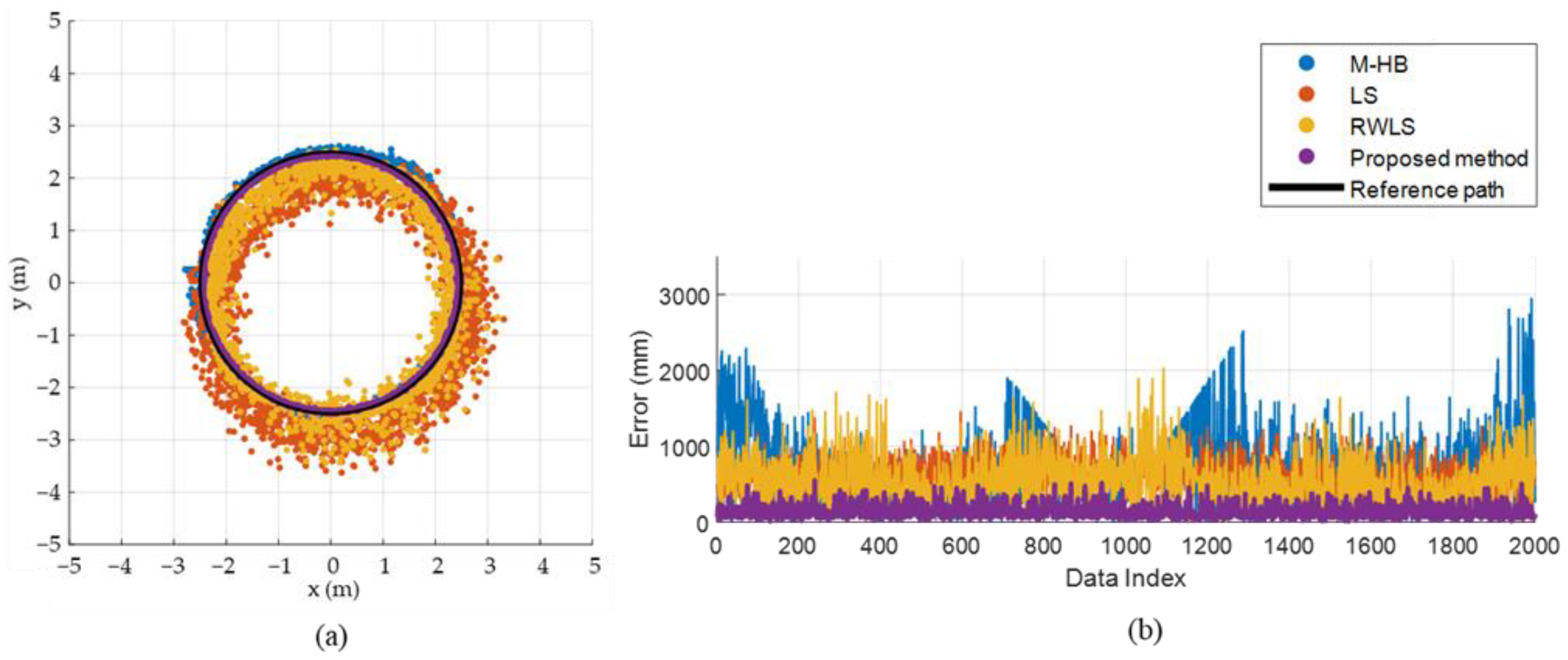
3.1. Simulation Setup and Results
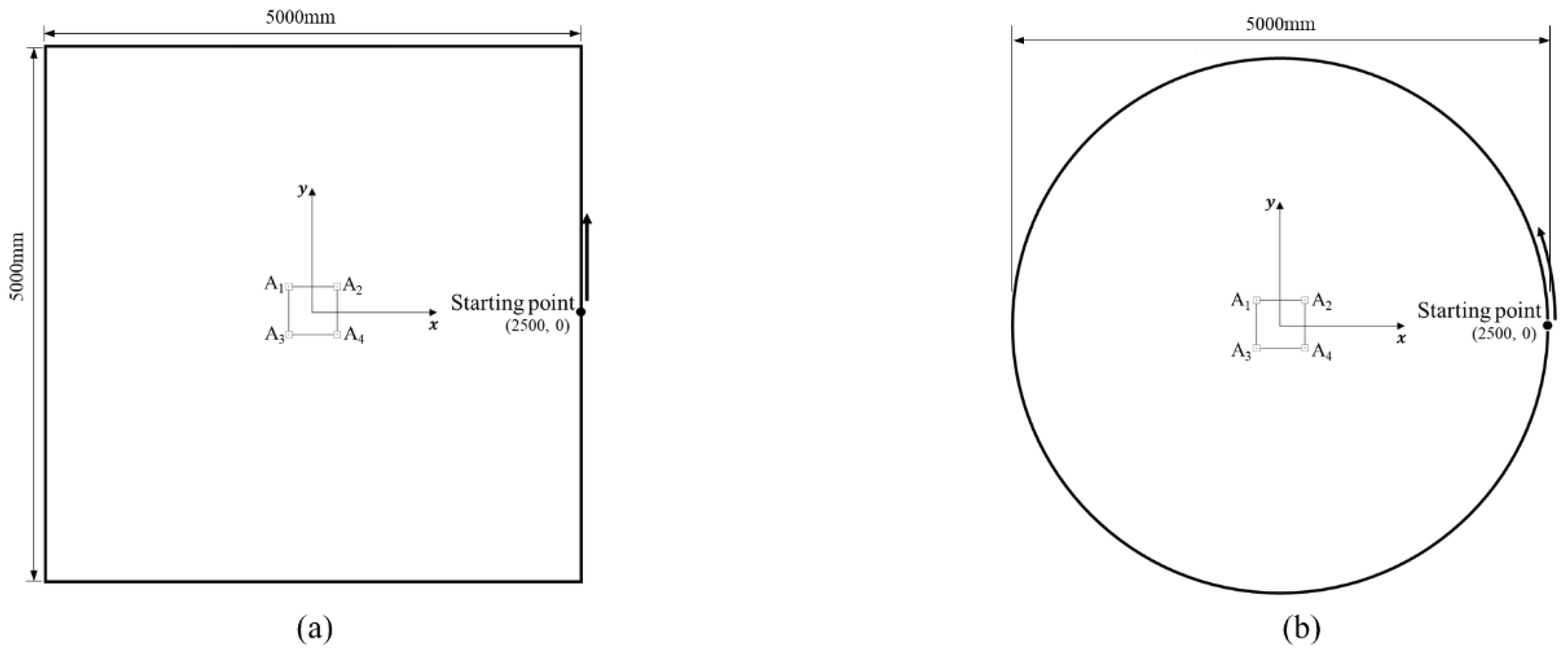
3.1.1. Simulation Setup
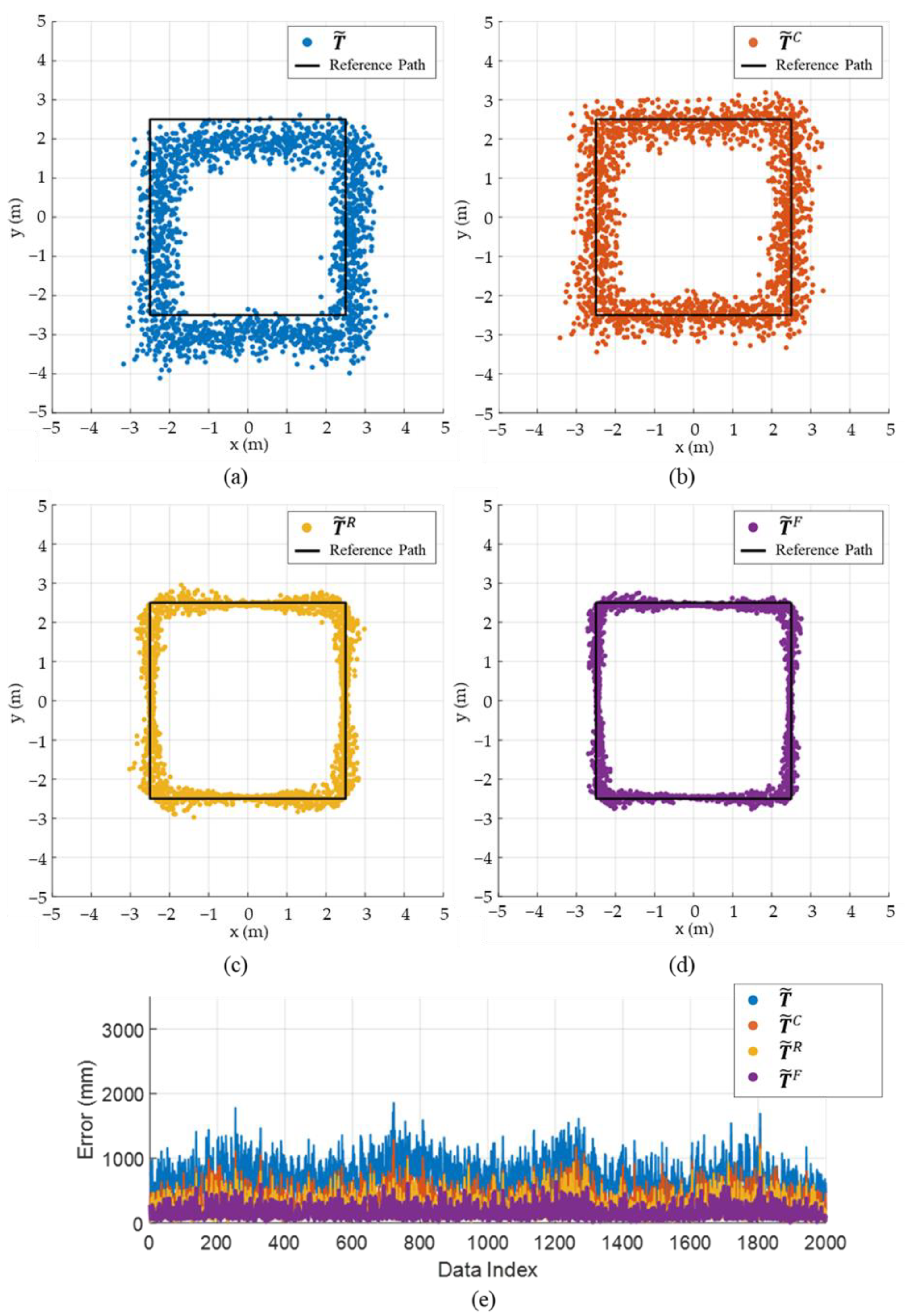
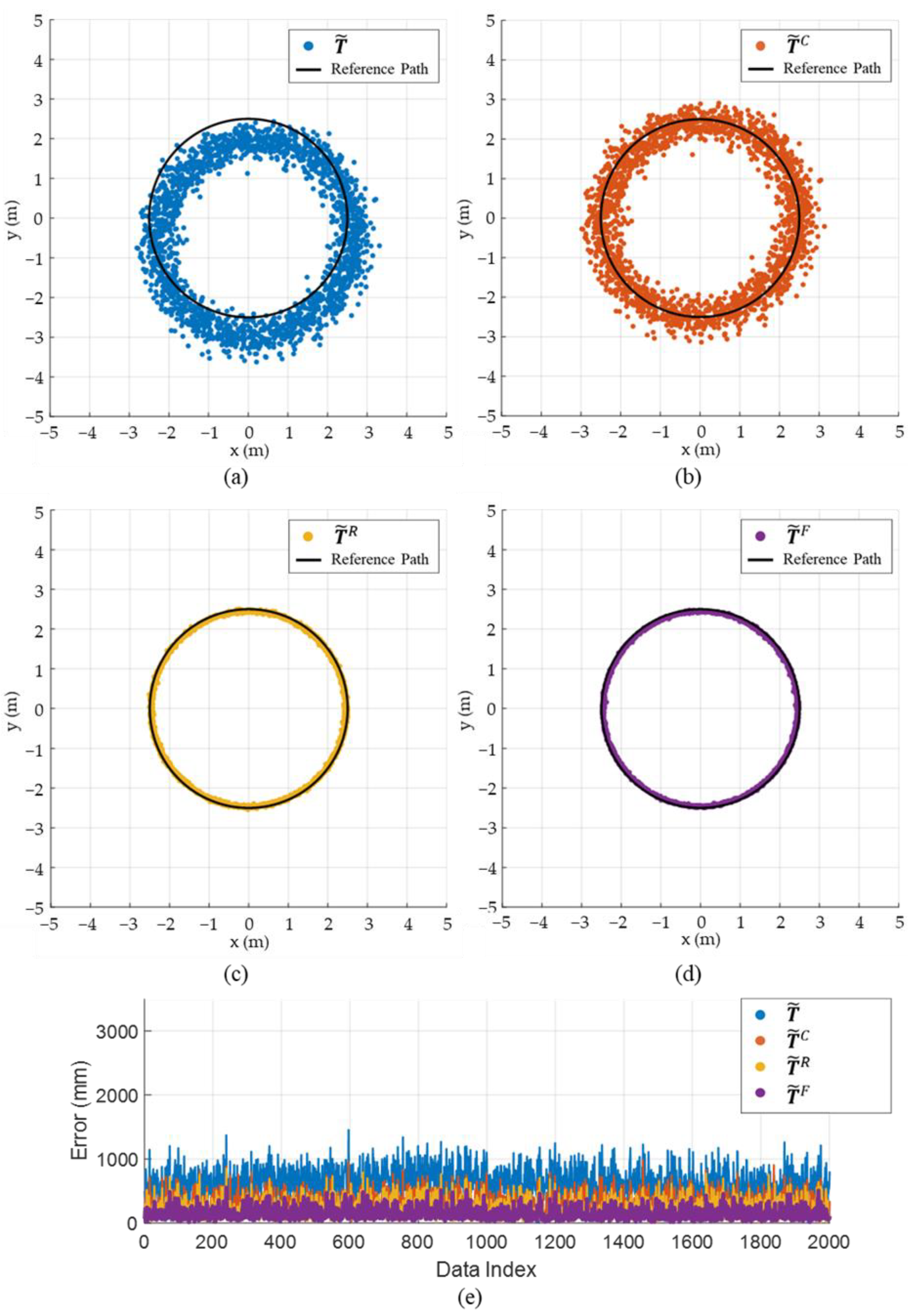
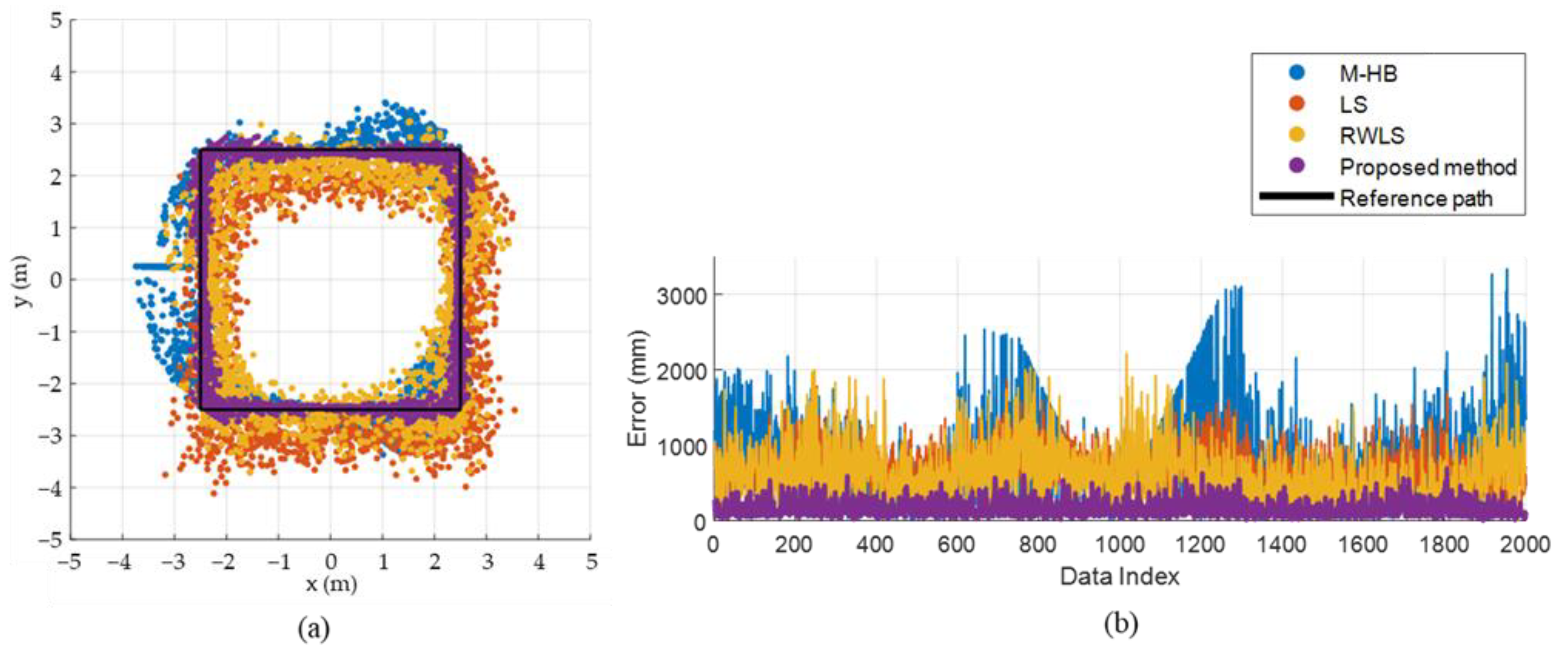
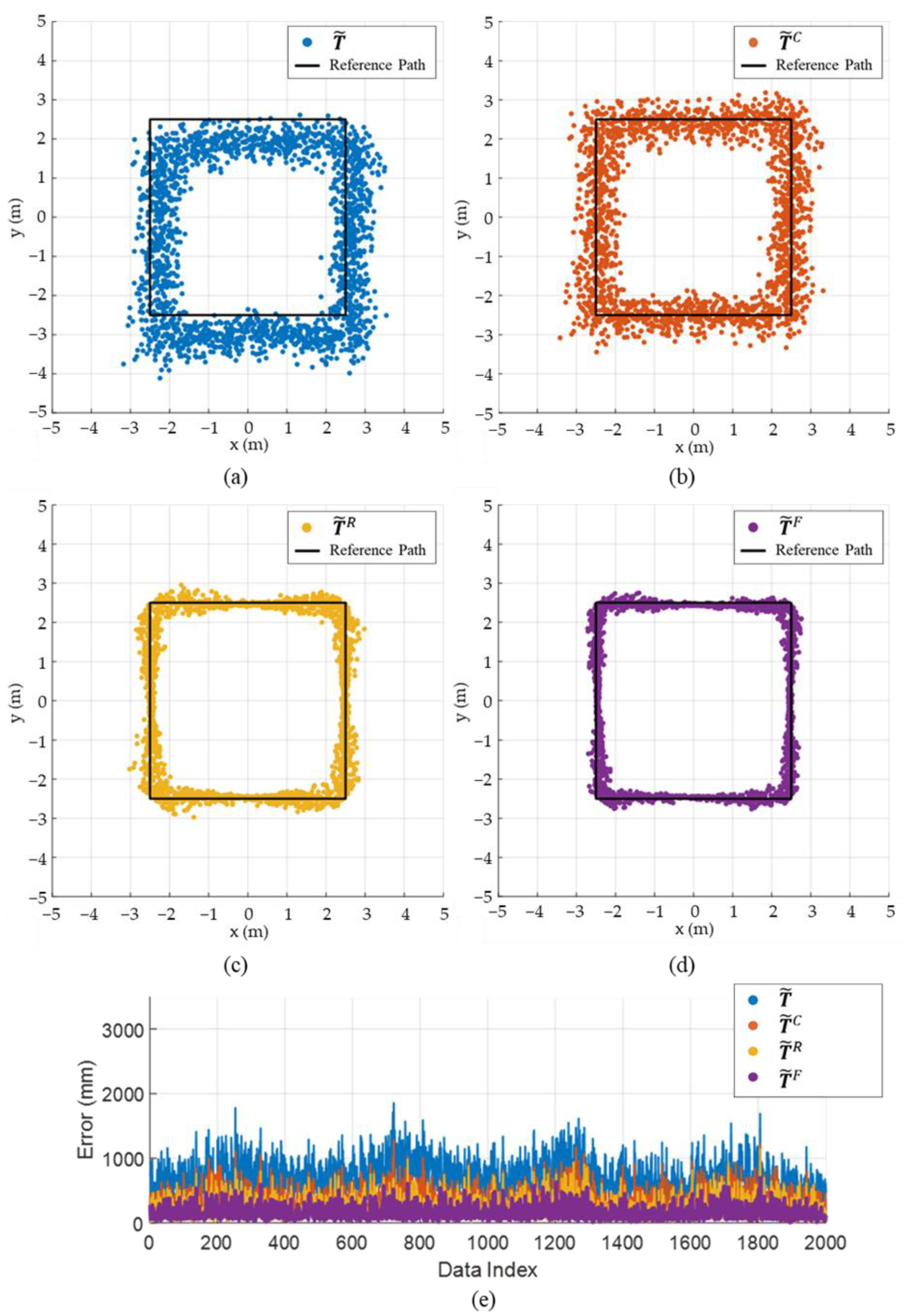
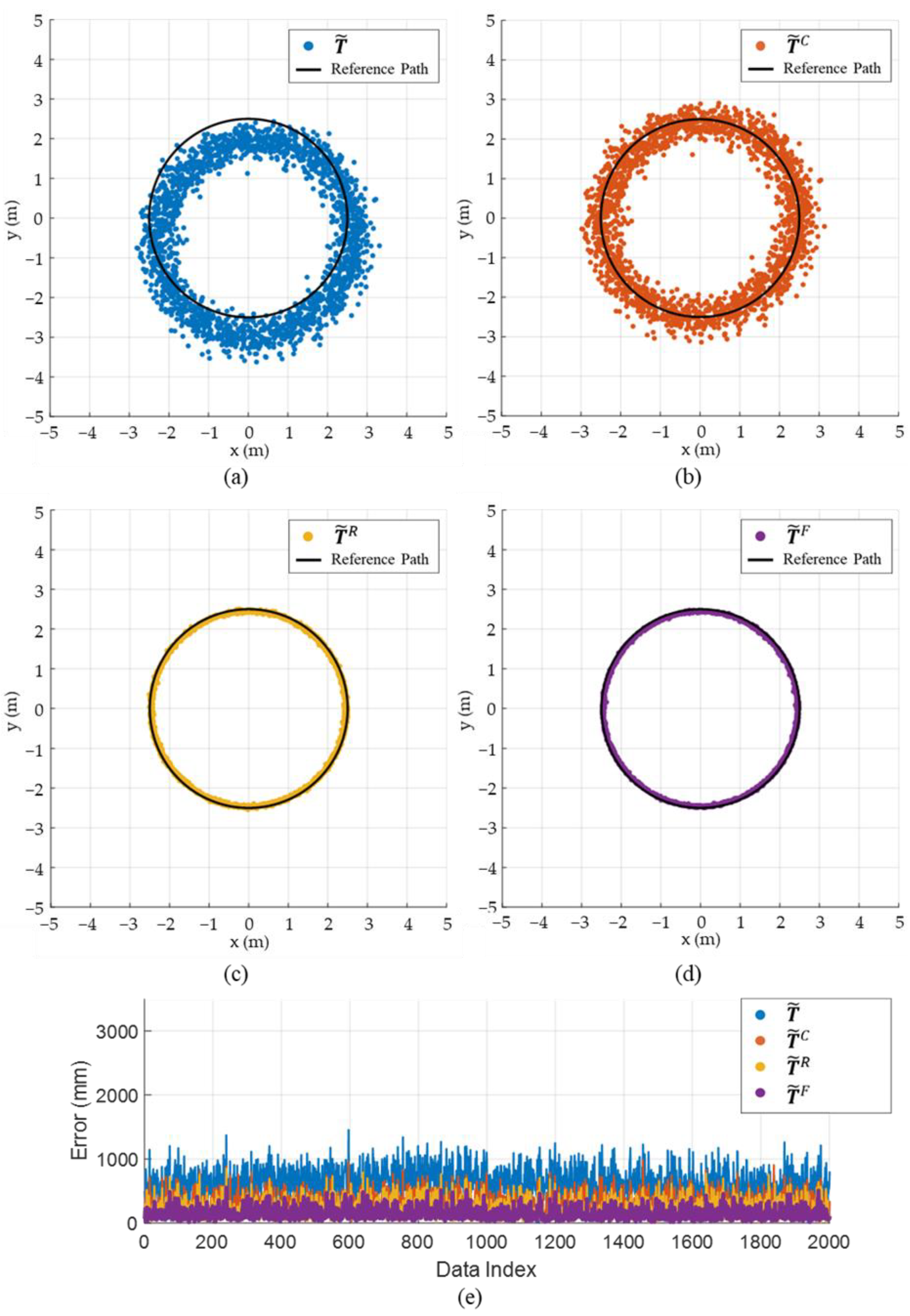
3.1.2. Simulation Results
3.2. Experimental Setup and Results
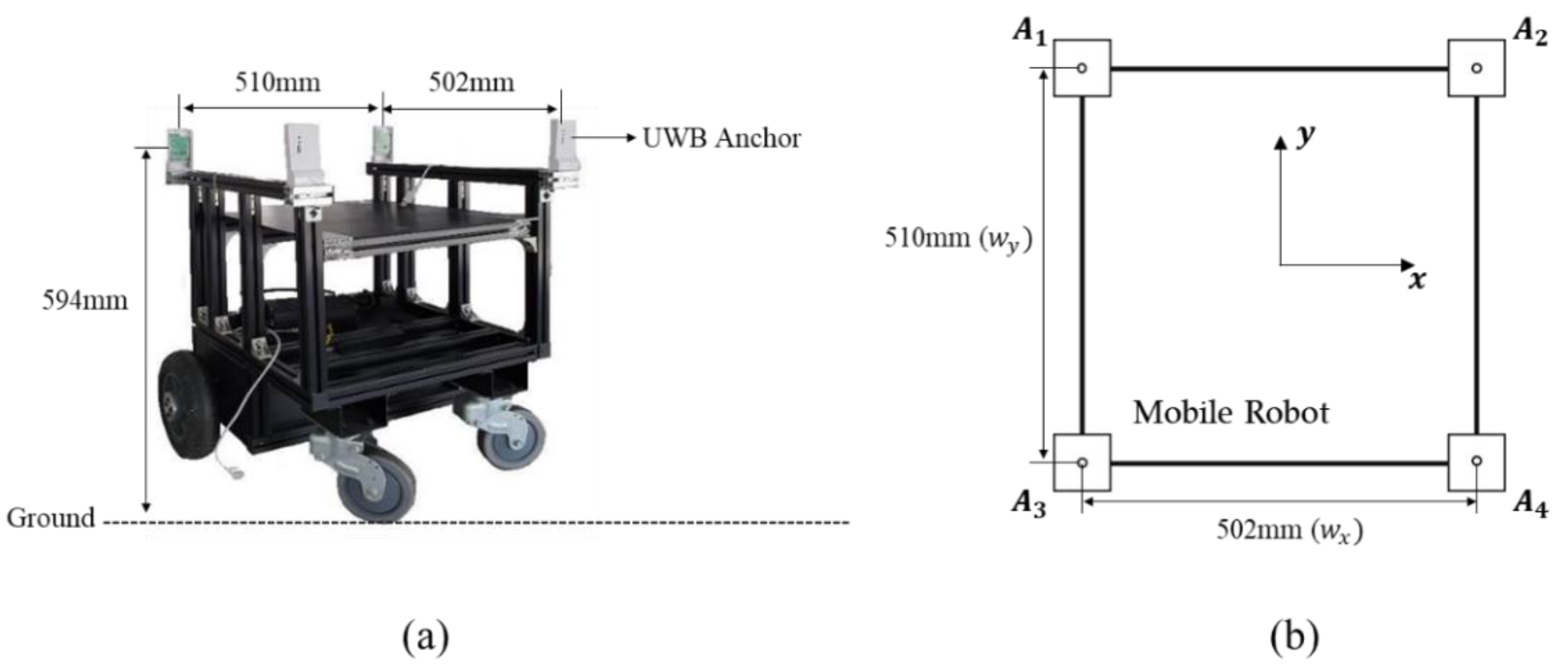
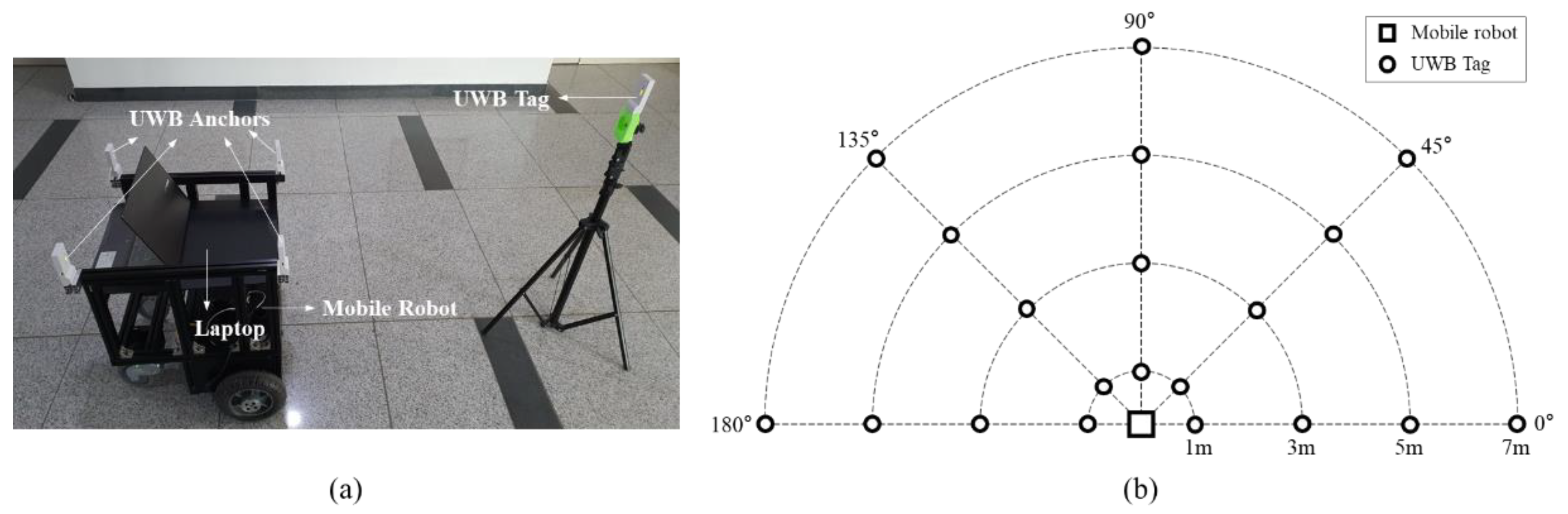
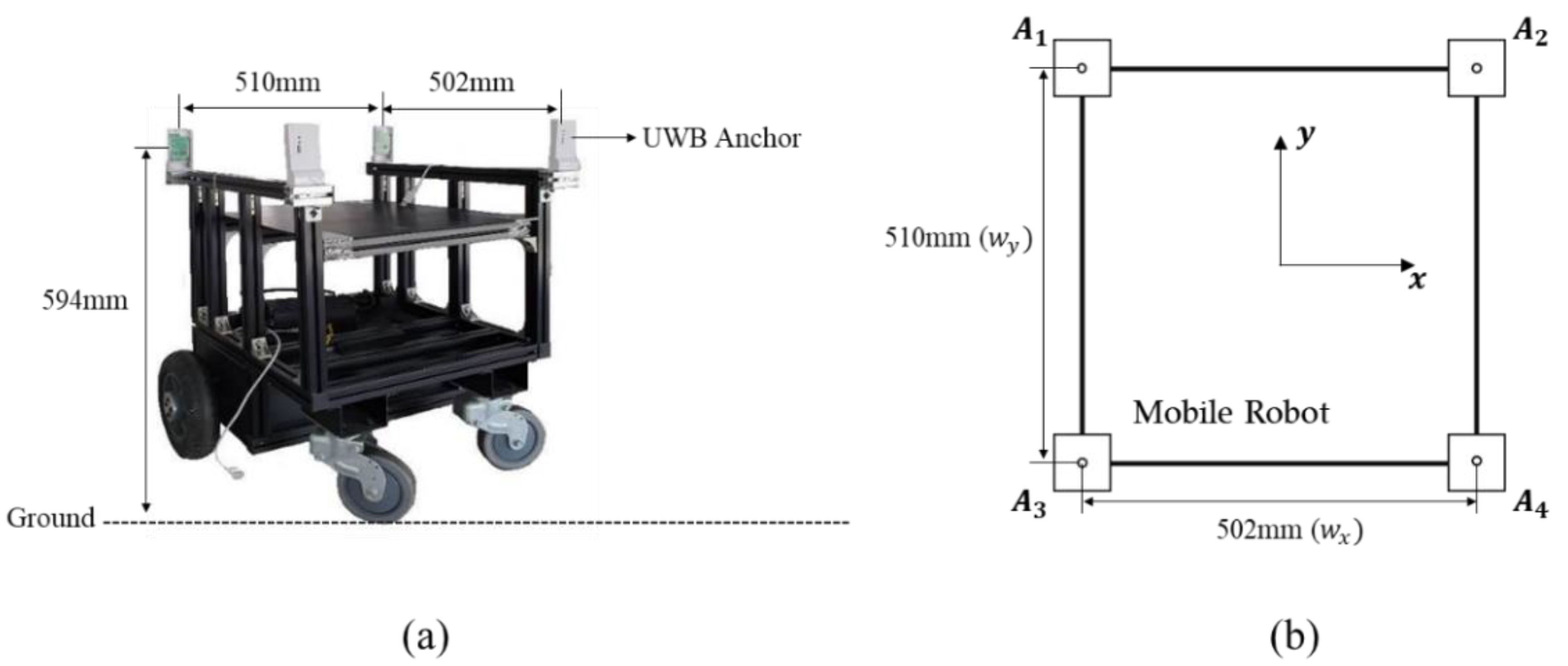
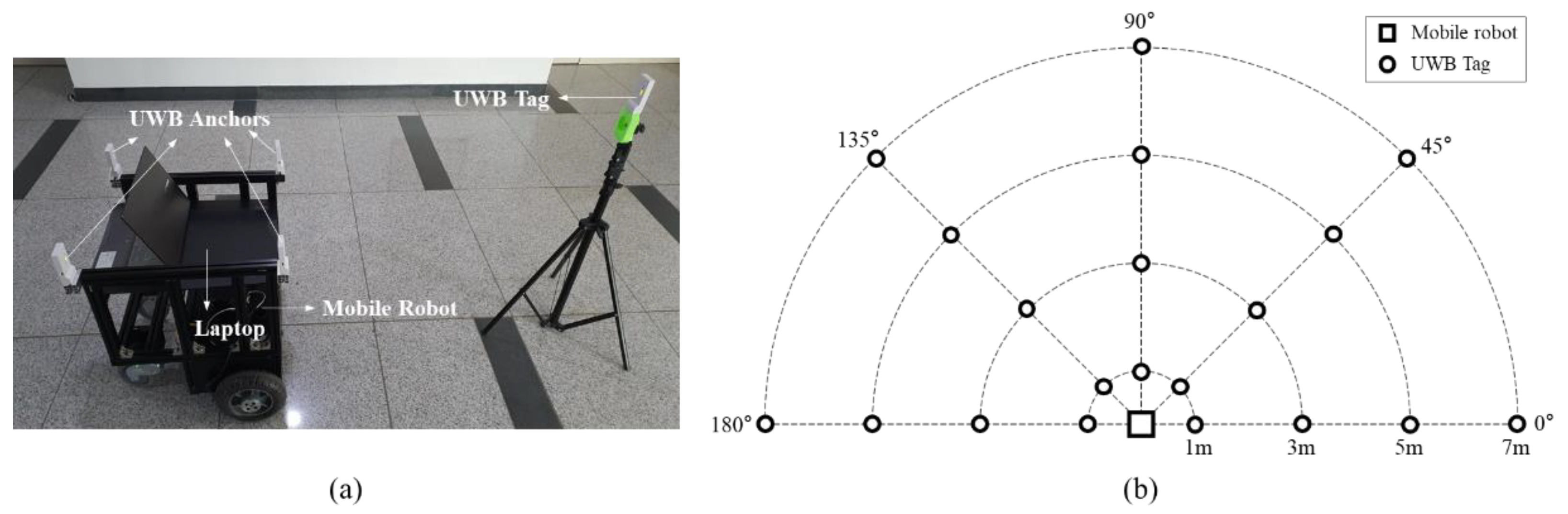
3.2.1. Experimental Setup
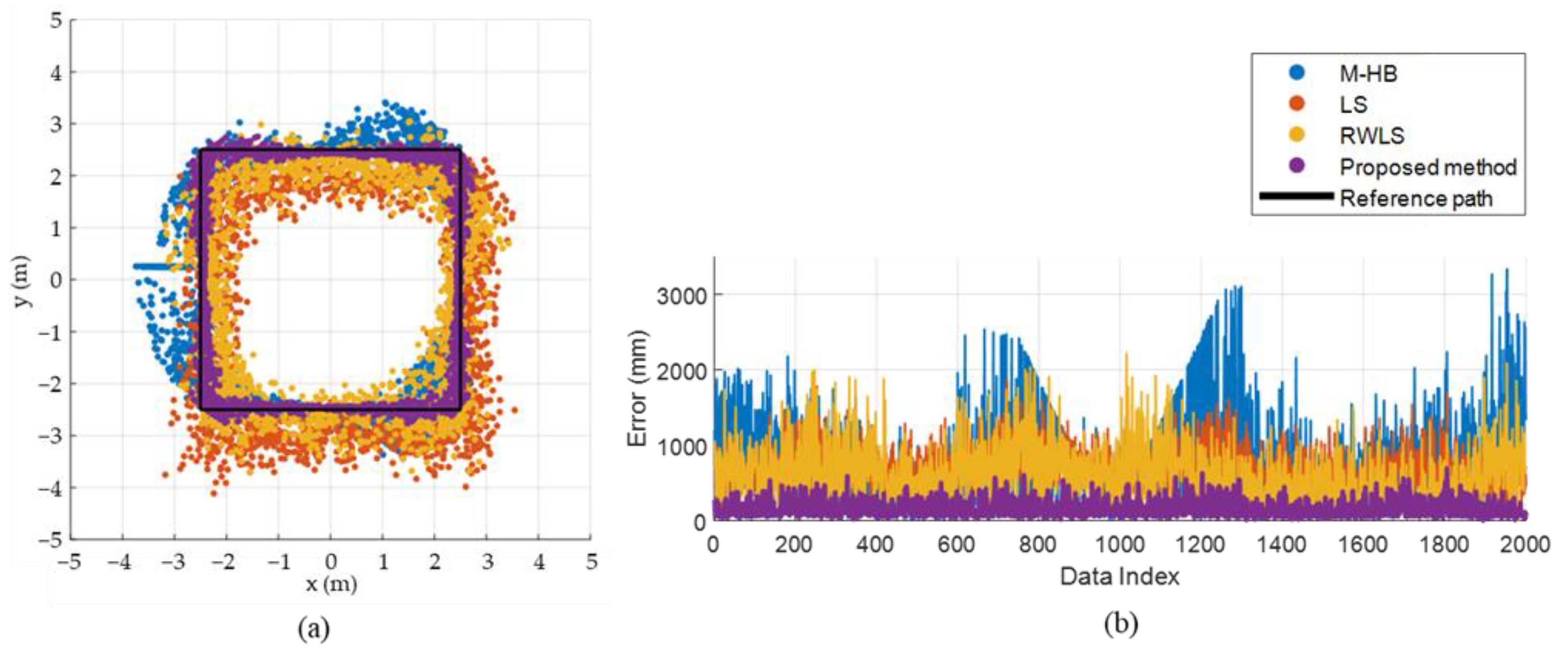
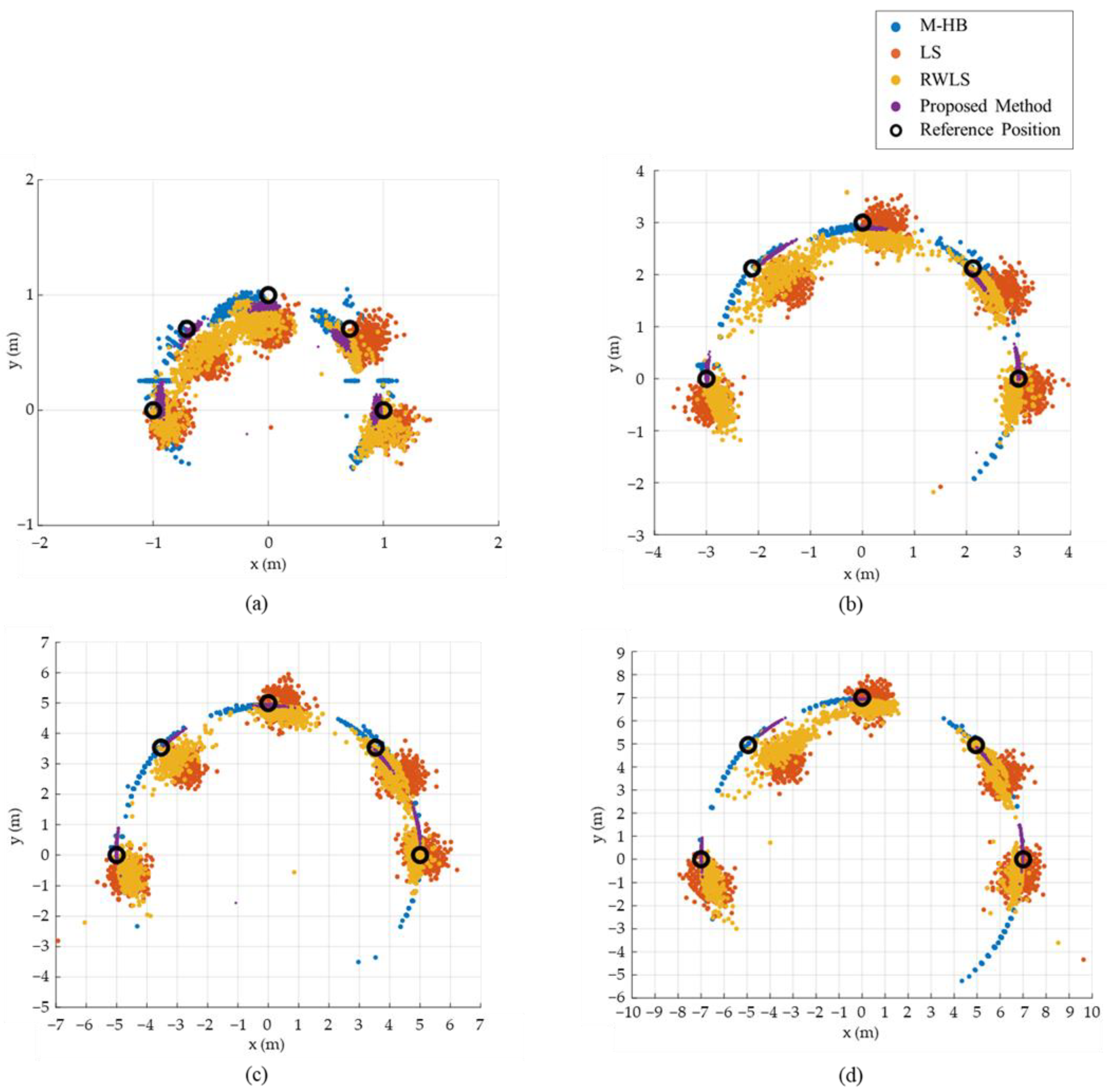
3.2.2. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lam, C.-P.; Chou, C.-T.; Chiang, K.-H.; Fu, L.-C. Human-Centered Robot Navigation—Towards a Harmoniously Human–Robot Coexisting Environment. IEEE Trans. Robot. 2011, 27, 99–112. [Google Scholar] [CrossRef]
- Islam, M.J.; Hong, J.; Sattar, J. Person-Following by Autonomous Robots: A Categorical Overview. Int. J. Robot. Res. 2019, 38, 1581–1618. [Google Scholar] [CrossRef] [Green Version]
- Honig, S.S.; Oron-Gilad, T.; Zaichyk, H.; Sarne-Fleischmann, V.; Olatunji, S.; Edan, Y. Toward Socially Aware Person-Following Robots. IEEE Trans. Cogn. Dev. Syst. 2018, 10, 936–954. [Google Scholar] [CrossRef]
- Rawashdeh, N.A.; Haddad, R.M.; Jadallah, O.A.; To’ma, A.E. A Person-Following Robotic Cart Controlled via a Smartphone Application: Design and Evaluation. In Proceedings of the 2017 International Conference on Research and Education in Mechatronics (REM), Wolfenbuttel, Germany, 14–15 September 2017; pp. 1–5. [Google Scholar]
- Su, S.; Cheng, S.; Dai, H.; Lin, M.; Yu, H.; Zhang, J. An Efficient Human-Following Method by Fusing Kernelized Correlation Filter and Depth Information for Mobile Robot. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 2099–2104. [Google Scholar]
- Sales, J.; Martí, J.V.; Marín, R.; Cervera, E.; Sanz, P.J. CompaRob: The Shopping Cart Assistance Robot. Int. J. Distrib. Sens. Netw. 2016, 12, 4781280. [Google Scholar] [CrossRef] [Green Version]
- Islam, M.; Lam, A.; Fukuda, H.; Kobayashi, Y.; Kuno, Y. A Person-Following Shopping Support Robot Based on Human Pose Skeleton Data and LiDAR Sensor. In Intelligent Computing Methodologies; Huang, D.-S., Huang, Z.-K., Hussain, A., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2019; Volume 11645, pp. 9–19. ISBN 978-3-030-26765-0. [Google Scholar]
- Nishimura, S.; Takemura, H.; Mizoguchi, H. Development of Attachable Modules for Robotizing Daily Items -Person Following Shopping Cart Robot-. In Proceedings of the 2007 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 15–28 December 2007; pp. 1506–1511. [Google Scholar]
- Wu, H.; Xu, W.; Yao, B.; Hu, Y.; Feng, H. Interacting Multiple Model-Based Adaptive Trajectory Prediction for Anticipative Human Following of Mobile Industrial Robot. Procedia Comput. Sci. 2020, 176, 3692–3701. [Google Scholar] [CrossRef]
- Sowrirajan, S.; Prakash, A.G.; Naven, S.R.; Gopi, V.P.; Deivalakshmi, S. Person Detection, Tracking and Following in a Differential Drive Mobile Robot. In Proceedings of the 2021 International Conference on Intelligent Technologies (CONIT), Hubli, India, 25–27 June 2021; pp. 1–6. [Google Scholar]
- Khan, R.; Yousaf, Z.; Memon, A.; Hussain, S.; Muttalib, A. Algorithm and Implementation of Human Following Co-Bot Using 2D LiDAR. PakJET 2021, 4, 89–93. [Google Scholar] [CrossRef]
- Jean, J.-H.; Lian, F.-L. Robust Visual Servo Control of a Mobile Robot for Object Tracking Using Shape Parameters. IEEE Trans. Contr. Syst. Technol. 2012, 20, 1461–1472. [Google Scholar] [CrossRef]
- Do, M.-Q.; Lin, C.-H. Embedded Human-Following Mobile-Robot with an RGB-D Camera. In Proceedings of the 2015 14th IAPR International Conference on Machine Vision Applications (MVA), Tokyo, Japan, 18–22 May 2015; pp. 555–558. [Google Scholar]
- Popov, V.L.; Ahmed, S.A.; Shakev, N.G.; Topalov, A.V. Detection and Following of Moving Targets by an Indoor Mobile Robot Using Microsoft Kinect and 2D Lidar Data. In Proceedings of the 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 19 November 2018; pp. 280–285. [Google Scholar]
- Khalajmehrabadi, A.; Gatsis, N.; Akopian, D. Modern WLAN Fingerprinting Indoor Positioning Methods and Deployment Challenges. IEEE Commun. Surv. Tutor. 2017, 19, 1974–2002. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.; Yuan, J.; Liu, H.; Qiu, J. Bluetooth Indoor Positioning Based on RSSI and Kalman Filter. Wirel. Pers Commun. 2017, 96, 4115–4130. [Google Scholar] [CrossRef]
- Uradzinski, M.; Guo, H.; Liu, X.; Yu, M. Advanced Indoor Positioning Using Zigbee Wireless Technology. Wirel. Pers Commun. 2017, 97, 6509–6518. [Google Scholar] [CrossRef]
- Mazhar, F.; Khan, M.G.; Sällberg, B. Precise Indoor Positioning Using UWB: A Review of Methods, Algorithms and Implementations. Wirel. Pers Commun. 2017, 97, 4467–4491. [Google Scholar] [CrossRef]
- Seco, F.; Jimenez, A.R.; Prieto, C.; Roa, J.; Koutsou, K. A Survey of Mathematical Methods for Indoor Localization. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 9–14. [Google Scholar]
- Piccinni, G.; Avitabile, G.; Coviello, G.; Talarico, C. Real-Time Distance Evaluation System for Wireless Localization. IEEE Trans. Circuits Syst. I 2020, 67, 3320–3330. [Google Scholar] [CrossRef]
- Al-Jazzar, S.; Caffery, J. ML and Bayesian TOA Location Estimators for NLOS Environments. In Proceedings of the IEEE 56th Vehicular Technology Conference, Vancouver, BC, Canada, 24–28 September 2002; Volume 2, pp. 1178–1181. [Google Scholar]
- Mekonnen, Z.W.; Slottke, E.; Luecken, H.; Steiner, C.; Wittneben, A. Constrained Maximum Likelihood Positioning for UWB Based Human Motion Tracking. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–10. [Google Scholar]
- Fox, D.; Hightower, J.; Liao, L.; Schulz, D.; Borriello, G. Bayesian Filtering for Location Estimation. IEEE Pervasive Comput. 2003, 2, 24–33. [Google Scholar] [CrossRef] [Green Version]
- Perakis, H.; Gikas, V. Evaluation of Range Error Calibration Models for Indoor UWB Positioning Applications. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 206–212. [Google Scholar]
- Poulose, A.; Eyobu, O.S.; Kim, M.; Han, D.S. Localization Error Analysis of Indoor Positioning System Based on UWB Measurements. In Proceedings of the 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), Zagreb, Croatia, 2–5 July 2019; pp. 84–88. [Google Scholar]
- Güvenç, İ.; Chong, C.-C.; Watanabe, F.; Inamura, H. NLOS Identification and Weighted Least-Squares Localization for UWB Systems Using Multipath Channel Statistics. EURASIP J. Adv. Signal Process. 2007, 2008, 271984. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Wang, B. Residual Based Weighted Least Square Algorithm for Bluetooth/UWB Indoor Localization System. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 5959–5963. [Google Scholar]
- Feng, T.; Yu, Y.; Wu, L.; Bai, Y.; Xiao, Z.; Lu, Z. A Human-Tracking Robot Using Ultra Wideband Technology. IEEE Access 2018, 6, 42541–42550. [Google Scholar] [CrossRef]
- Monica, S.; Ferrari, G. Improving UWB-Based Localization in IoT Scenarios with Statistical Models of Distance Error. Sensors 2018, 18, 1592. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chantaweesomboon, W.; Suwatthikul, C.; Manatrinon, S.; Athikulwongse, K.; Kaemarungsi, K.; Ranron, R.; Suksompong, P. On Performance Study of UWB Real Time Locating System. In Proceedings of the 2016 7th International Conference of Information and Communication Technology for Embedded Systems (IC-ICTES), Bangkok, Thailand, 20–22 March 2016; pp. 19–24. [Google Scholar]
- Horvath, K.A.; Ill, G.; Milankovich, A. Passive Extended Double-Sided Two-Way Ranging Algorithm for UWB Positioning. In Proceedings of the 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), Milan, Italy, 4–7 July 2017; pp. 482–487. [Google Scholar]
- Cheung, K.W.; So, H.C.; Ma, W.-K.; Chan, Y.T. Least Squares Algorithms for Time-of-Arrival-Based Mobile Location. IEEE Trans. Signal Process. 2004, 52, 1121–1128. [Google Scholar] [CrossRef] [Green Version]
- Kwak, S.G.; Kim, J.H. Central Limit Theorem: The Cornerstone of Modern Statistics. Korean J. Anesthesiol. 2017, 70, 144. [Google Scholar] [CrossRef]
- Chansamood, P.; Wisadsud, S.; Maneerat, K.; Sanpechuda, T.; Chinda, K.; Kaemarungsi, K. Effects of Antenna Orientation in Ultra Wideband Indoor Positioning System. In Proceedings of the 2019 16th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Pattaya, Chonburi, Thailand, 10–13 July 2019; pp. 397–400. [Google Scholar]
- APS011 APPLICATION NOTE Source of Error in DW1000 Based Two-Way Ranging (TWR) Schems. Available online: https://www.decawave.com/wp-content/uploads/2018/10/APS011_Sources-of-Error-in-Two-Way-Ranging-Schemes_v1.1.pdf (accessed on 5 January 2022).
- DWM1001C Data Sheet. Available online: https://www.decawave.com/sites/default/files/dwm1001_datasheet.pdf (accessed on 5 January 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UWB Anchor ID | Mean (mm) | Standard Deviation |
|---|---|---|
| A1 | −10 | 50 |
| A2 | −180 | 50 |
| A3 | 56 | 50 |
| A4 | −29 | 50 |
| Mean (mm) | SD (mm) | Max (mm) | Min (mm) | |
|---|---|---|---|---|
| 703.3 | 283.0 | 1856.3 | 32.1 | |
| 360.2 | 197.5 | 1286.6 | 3.7 | |
| 239.5 | 171.6 | 1135.9 | 4.8 | |
| 162.2 | 107.8 | 694.8 | 4.5 |
| Mean (mm) | SD (mm) | Max (mm) | Min (mm) | |
|---|---|---|---|---|
| 610.2 | 235.9 | 1453.1 | 4.0 | |
| 314.8 | 162.0 | 979.0 | 15.1 | |
| 212.8 | 146.5 | 849.3 | 3.9 | |
| 143.3 | 91.2 | 552.9 | 11.0 |
| Mean (mm) | SD (mm) | Max (mm) | Min (mm) | |
|---|---|---|---|---|
| M-HB | 801.8 | 588.1 | 3334.1 | 9.4 |
| LS | 703.3 | 283.0 | 1856.3 | 32.1 |
| RWLS | 623.9 | 365.8 | 2212.7 | 7.0 |
| Proposed Method | 162.2 | 107.8 | 694.8 | 4.5 |
| Mean (mm) | SD (mm) | Max (mm) | Min (mm) | |
|---|---|---|---|---|
| M-HB | 686.1 | 495.5 | 2945.7 | 3.8 |
| LS | 610.2 | 235.9 | 1453.1 | 4.0 |
| RWLS | 547.6 | 312.7 | 2031.7 | 11.8 |
| Proposed Method | 143.3 | 91.2 | 552.9 | 11.0 |
| Distance | Method | Mean (mm) | SD (mm) | Max (mm) | Min (mm) |
|---|---|---|---|---|---|
| 1 m | M-HB | 274.8 | 117.2 | 754.4 | 33.8 |
| LS | 242.7 | 76.1 | 612.6 | 58.1 | |
| RWLS | 219.6 | 88.7 | 547.4 | 25.8 | |
| Proposed Method | 96.6 | 36.2 | 429.4 | 36.4 | |
| 3 m | M-HB | 610.0 | 313.4 | 1546.8 | 111.1 |
| LS | 592.3 | 189.7 | 1442.5 | 109.4 | |
| RWLS | 560.1 | 281.6 | 1884.2 | 63.6 | |
| Proposed Method | 282.3 | 112.4 | 844.8 | 64.6 | |
| 5 m | M-HB | 976.1 | 529.7 | 3851.6 | 61.0 |
| LS | 863.3 | 341.0 | 4026.0 | 186.9 | |
| RWLS | 676.0 | 378.4 | 2825.7 | 36.1 | |
| Proposed Method | 487.9 | 216.3 | 2280.7 | 113.2 | |
| 7 m | M-HB | 1303.6 | 573.5 | 3737.7 | 138.6 |
| LS | 1271.6 | 412.9 | 4083.6 | 185.4 | |
| RWLS | 1132.1 | 601.4 | 3413.9 | 100.0 | |
| Proposed Method | 601.3 | 257.3 | 2127.7 | 139.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bae, K.; Son, Y.; Song, Y.-E.; Jung, H. Component-Wise Error Correction Method for UWB-Based Localization in Target-Following Mobile Robot. Sensors 2022, 22, 1180. https://doi.org/10.3390/s22031180
Bae K, Son Y, Song Y-E, Jung H. Component-Wise Error Correction Method for UWB-Based Localization in Target-Following Mobile Robot. Sensors. 2022; 22(3):1180. https://doi.org/10.3390/s22031180
Chicago/Turabian StyleBae, Kyungbin, Yooha Son, Young-Eun Song, and Hoeryong Jung. 2022. "Component-Wise Error Correction Method for UWB-Based Localization in Target-Following Mobile Robot" Sensors 22, no. 3: 1180. https://doi.org/10.3390/s22031180
APA StyleBae, K., Son, Y., Song, Y.-E., & Jung, H. (2022). Component-Wise Error Correction Method for UWB-Based Localization in Target-Following Mobile Robot. Sensors, 22(3), 1180. https://doi.org/10.3390/s22031180