

The Application of PVDF-Based Piezoelectric Patches in Energy Harvesting from Tire Deformation
 ,
,  ,
, 
Abstract
1. Introduction
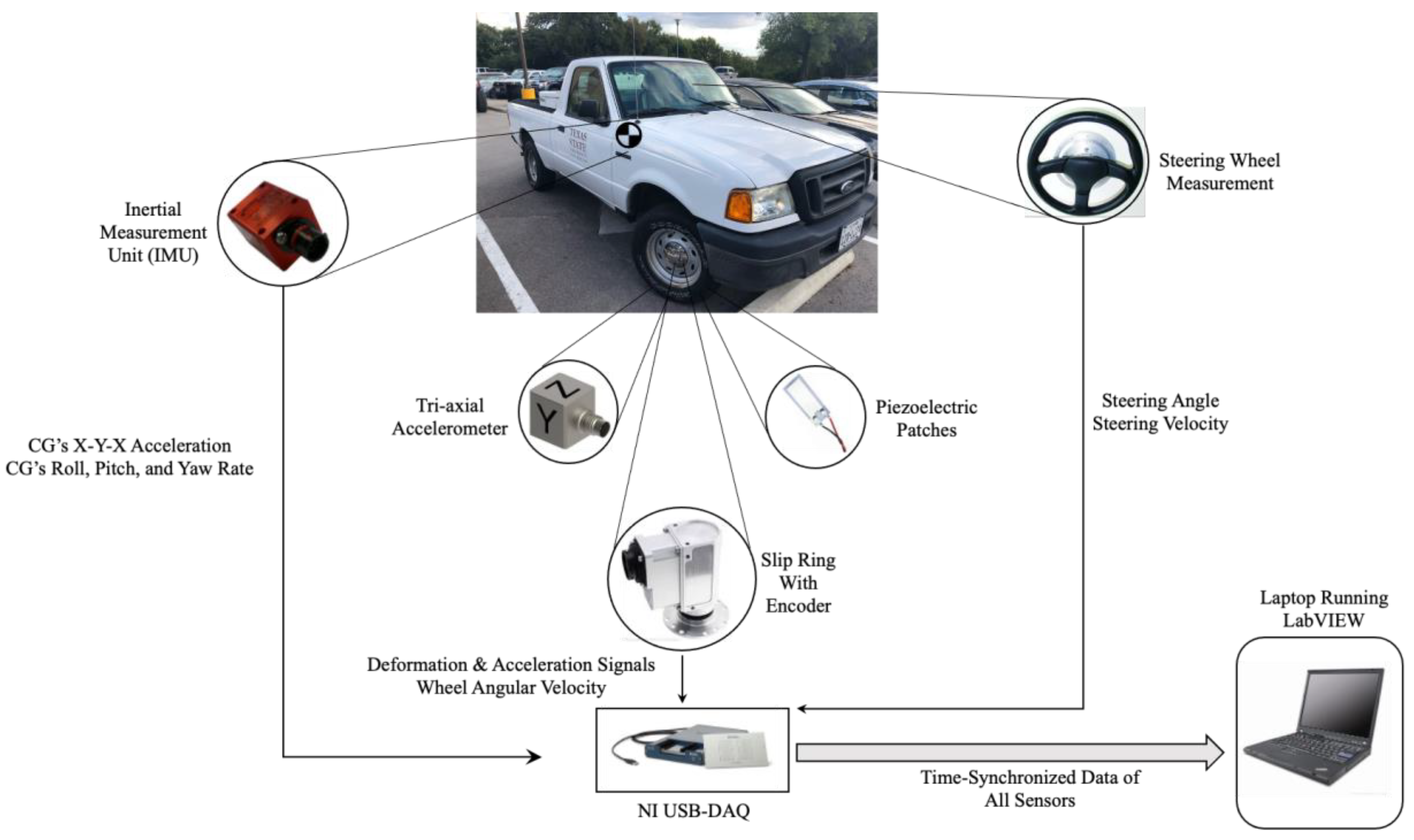
2. Experimental Test Setup
2.1. Instrumented Tires
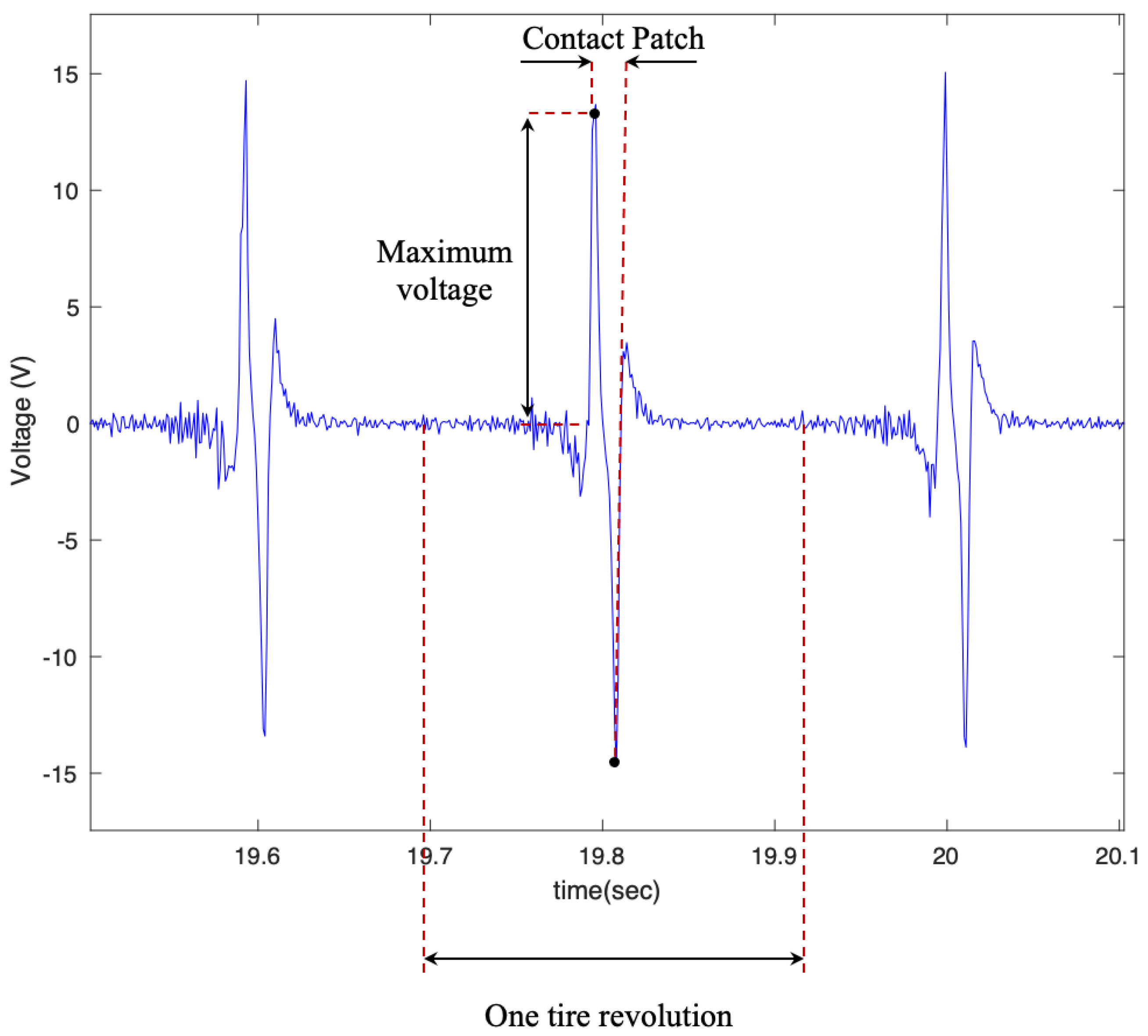
2.1.1. PVDF Piezoelectric Patches
2.1.2. Tri-Axial Accelerometer
2.1.3. Connectors on the Rim
2.1.4. Slip Ring
2.1.5. Other Vehicle Sensors
2.1.6. Data Collecting System
3. Experiments
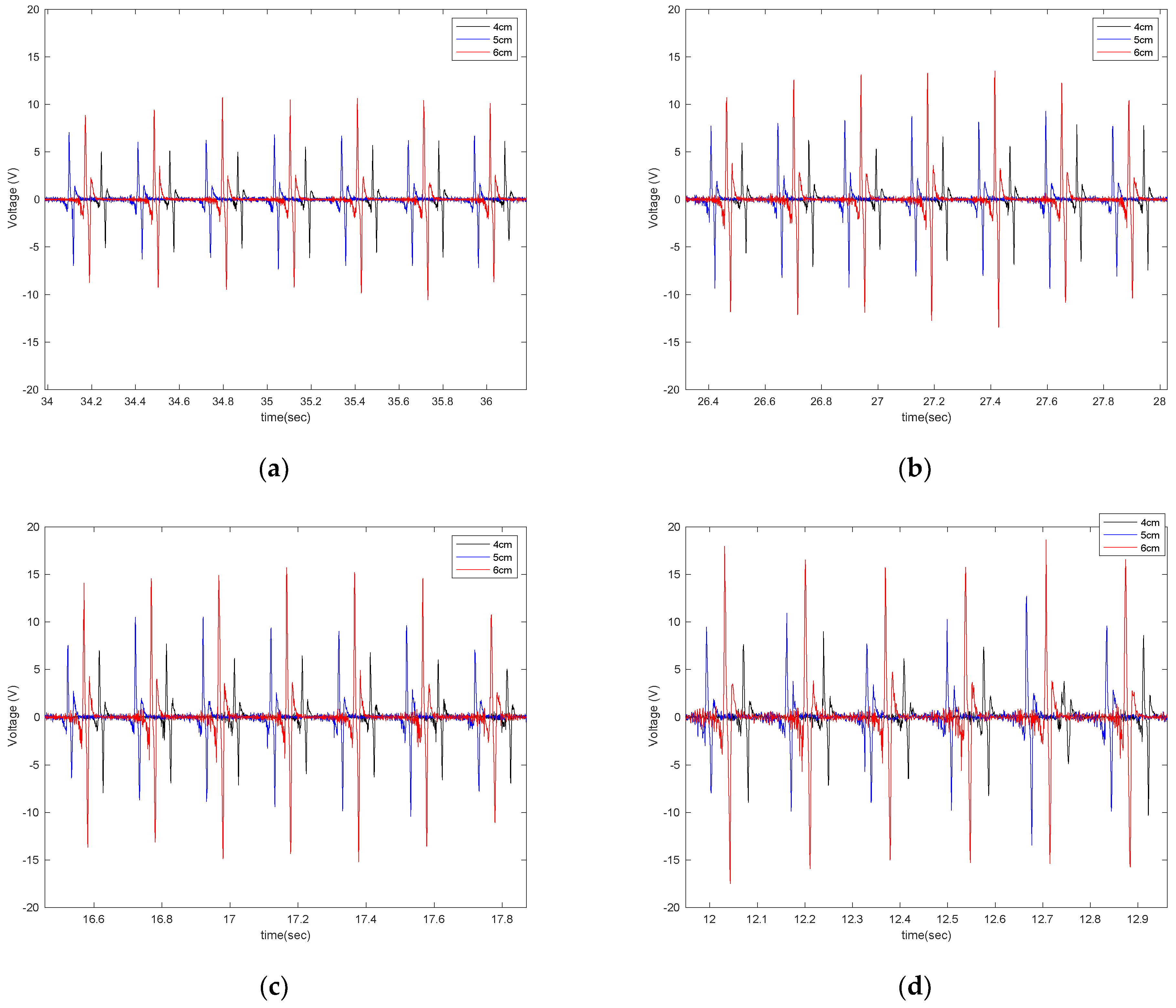
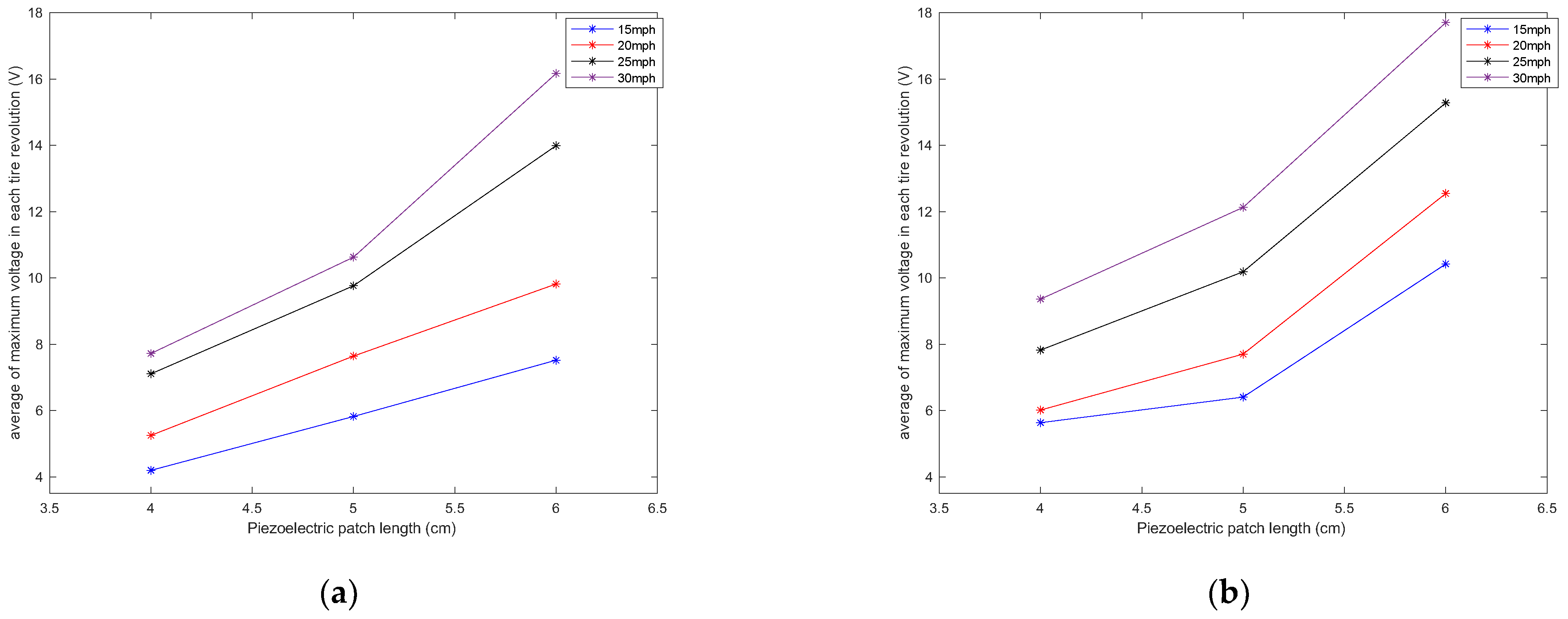
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khaleghian, S.; Ghasemalizadeh, O.; Taheri, S.; Flintsch, G. A Combination of Intelligent Tire and Vehicle Dynamic Based Algorithm to Estimate the Tire-Road Friction. SAE Int. J. Passeng. Cars-Mech. Syst. 2019, 12, 81–98. [Google Scholar] [CrossRef]
- Khaleghian, S.; Taheri, S. Intelligent Tire Based Pressure Monitoring Algorithm. In Proceedings of the ASME 2017 International Mechanical Engineering Congress and Exposition, Tampa, FL, USA, 3–9 November 2017; American Society of Mechanical Engineers: New York, NY, USA, 2017; p. V012T16A018. [Google Scholar]
- Behroozinia, P.; Khaleghian, S.; Taheri, S.; Mirzaeifar, R. Damage diagnosis in intelligent tires using time-domain and frequency-domain analysis. Mech. Based Des. Struct. Mach. 2018, 47, 54–66. [Google Scholar] [CrossRef]
- Khaleghian, S.; Taheri, S. Terrain classification using intelligent tire. J. Terramechanics 2017, 71, 15–24. [Google Scholar] [CrossRef]
- Erdogan, G.; Hong, S.; Borrelli, F.; Hedrick, K. Tire Sensors for the Measurement of Slip Angle and Friction Coefficient and Their Use in Stability Control Systems. SAE Int. J. Passeng. Cars-Mech. Syst. 2011, 4, 44–58. [Google Scholar] [CrossRef]
- Matsuzaki, R.; Kamai, K.; Seki, R. Intelligent tires for identifying coefficient of friction of tire/road contact surfaces using three-axis accelerometer. Smart Mater. Struct. 2014, 24, 025010. [Google Scholar] [CrossRef]
- Niskanen, A.; Tuononen, A.J. Three Three-Axis IEPE Accelerometers on the Inner Liner of a Tire for Finding the Tire-Road Friction Potential Indicators. Sensors 2015, 15, 19251–19263. [Google Scholar] [CrossRef]
- Matsuzaki, R.; Todoroki, A. Wireless Monitoring of Automobile Tires for Intelligent Tires. Sensors 2008, 8, 8123–8138. [Google Scholar] [CrossRef]
- APOLLO Consortium. Final Report Including Technical Implementation Plan (Annex); APOLLO Deliverable 22/23 for Project IST-2001-34372; Technical Research Centre of Finland (VTT): Espoo, Finland, 2005. [Google Scholar]
- Yang, X.; Olatunbosun, O.; Ramos, D.G.-P.; Bolarinwa, E. Experimental Investigation of Tire Dynamic Strain Characteristics for Developing Strain-Based Intelligent Tire System. SAE Int. J. Passeng. Cars-Mech. Syst. 2013, 6, 97–108. [Google Scholar] [CrossRef]
- Yang, X.; Olatunbosun, O.; Garcia-Pozuelo, D.; Bolarinwa, E. FE-based tire loading estimation for developing strain-based intelligent tire system. SAE Technical Paper; 2015 Apr 14. No. 2015-01-0627. SAE Technical Paper, 2015. [Google Scholar] [CrossRef]
- Jo, H.Y.; Yeom, M.; Lee, J.; Park, K.; Oh, J. Development of intelligent tire system. SAE Technical Paper, 8 April 2013. [Google Scholar] [CrossRef]
- Matsuzaki, R.; Todoroki, A. Intelligent tires for improved tire safety based on strain measurements. In Proceedings of the Health Monitoring of Structural and Biological Systems, San Diego, CA, USA, 8–11 March 2009. [Google Scholar]
- Matsuzaki, R.; Hiraoka, N.; Todoroki, A.; Mizutani, Y. Analysis of Applied Load Estimation Using Strain for Intelligent Tires. J. Solid Mech. Mater. Eng. 2010, 4, 1496–1510. [Google Scholar] [CrossRef]
- Maurya, D.; Kumar, P.; Khaleghian, S.; Sriramdas, R.; Kang, M.G.; Kishore, R.; Kumar, V.; Song, H.-C.; Park, J.-M.; Taheri, S.; et al. Energy harvesting and strain sensing in smart tire for next generation autonomous vehicles. Appl. Energy 2018, 232, 312–322. [Google Scholar] [CrossRef]
- Yang, Z.; Zhou, S.; Zu, J.; Inman, D. High-Performance Piezoelectric Energy Harvesters and Their Applications. Joule 2018, 2, 642–697. [Google Scholar] [CrossRef]
- Schier, M.; Nasri, M.; Kraft, W.; Kevlishvili, N.; Paulides, J.J.; Encica, L. Combining mechanical, electrical and thermal energy conversion for ecological vehicle energy harvesting concepts. In Proceedings of the 2018 Thirteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 10–12 April 2018; pp. 1–10. [Google Scholar]
- Tornincasa, S.; Repetto, M.; Bonisoli, E.; Di Monaco, F. Energy harvester for vehicle tires: Nonlinear dynamics and experimental outcomes. J. Intell. Mater. Syst. Struct. 2012, 23, 3–13. [Google Scholar] [CrossRef]
- Hatipoglu, G.; Urey, H. FR4-based electromagnetic energy harvester for wireless tyre sensor nodes. Procedia Chem. 2009, 1, 1211–1214. [Google Scholar] [CrossRef]
- Lee, J.; Choi, B. Development of a piezoelectric energy harvesting system for implementing wireless sensors on the tires. Energy Convers. Manag. 2014, 78, 32–38. [Google Scholar] [CrossRef]
- van den Ende, D.A.; van de Wiel, H.J.; Groen, W.A.; van der Zwaag, S. Direct strain energy harvesting in automobile tires using piezoelectric PZT–polymer composites. Smart Mater. Struct. 2012, 21, 015011. [Google Scholar] [CrossRef]
- Dudem, B.; Kim, D.H.; Bharat, L.K.; Yu, J.S. Highly-flexible piezoelectric nanogenerators with silver nanowires and barium titanate embedded composite films for mechanical energy harvesting. Appl. Energy 2018, 230, 865–874. [Google Scholar] [CrossRef]
- Hu, Y.; Xu, C.; Zhang, Y.; Lin, L.; Snyder, R.L.; Wang, Z.L. A Nanogenerator for Energy Harvesting from a Rotating Tire and its Application as a Self-Powered Pressure/Speed Sensor. Adv. Mater. 2011, 23, 4068–4071. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, Y.; Zhong, X.; Su, Y.; Zhou, Y.; Hu, C.; Wang, Z.L. Single-Electrode-Based Rotating Triboelectric Nanogenerator for Harvesting Energy from Tires. ACS Nano 2013, 8, 680–689. [Google Scholar] [CrossRef]
- Bera, B.; Das Sarkar, M. Piezoelectricity in PVDF and PVDF Based Piezoelectric Nanogenerator: A Concept. IOSR J. Appl. Phys. 2017, 9, 95–99. [Google Scholar] [CrossRef]
- Kalimuldina, G.; Turdakyn, N.; Abay, I.; Medeubayev, A.; Nurpeissova, A.; Adair, D.; Bakenov, Z. A Review of Piezoelectric PVDF Film by Electrospinning and Its Applications. Sensors 2020, 20, 5214. [Google Scholar] [CrossRef]
- Joseph, J.; Kumar, M.; Tripathy, S.; Kumar, G.D.V.S.; Singh, S.G.; Vaniari, S.R.K. A Highly Flexible Tactile Sensor with Self-Poled Electrospun PVDF Nanofiber. In 2018 IEEE SENSORS; IEEE: Piscataway, NJ, USA, 28 October 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Fan, F.R.; Tang, W.; Wang, Z.L. Flexible Nanogenerators for Energy Harvesting and Self-Powered Electronics. Adv. Mater. 2016, 28, 4283–4305. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, A.; Jia, Y.; Huang, Y.; Khoso, N.A.; Deb, H.; Fan, Q.; Shao, J. Preparation of PVDF-TrFE based electrospun nanofibers decorated with PEDOT-CNT/rGO composites for piezo-electric pressure sensor. J. Mater. Sci. Mater. Electron. 2019, 30, 14007–14021. [Google Scholar] [CrossRef]
- Ahmed, A.; Jia, Y.; Deb, H.; Arain, M.F.; Memon, H.; Pasha, K.; Haung, Y.; Fan, Q.; Shao, J. Ultra-sensitive all organic PVDF-TrFE E-spun nanofibers with enhanced β-phase for piezoelectric response. J. Mater. Sci. Mater. Electron. 2022, 33, 3965–3981. [Google Scholar] [CrossRef]
- Li, Q.; Xing, J.; Shang, D.; Wang, Y. A Flow Velocity Measurement Method Based on a PVDF Piezoelectric Sensor. Sensors 2019, 19, 1657. [Google Scholar] [CrossRef] [PubMed]
- Breglio, G.; Irace, A.; Pugliese, L.; Riccio, M.; Russo, M.; Strano, S.; Terzo, M. Development and Testing of a Low-Cost Wireless Monitoring System for an Intelligent Tire†. Machines 2019, 7, 49. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Unit | Value |
|---|---|---|
| Density | 103 kg/m3 | 1.78 |
| Dielectric constant | r | 13 |
| Piezoelectric constant | d31 pc/N | 25 |
| e31 mc/m2 | 75 | |
| g31 mVm/N | 220 | |
| Elongation | MD | % (at Break): 20–30 |
| TD | % (at Yield): 5–7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, K.; Bryant, M.; Song, I.-H.; You, B.H.; Khaleghian, S. The Application of PVDF-Based Piezoelectric Patches in Energy Harvesting from Tire Deformation. Sensors 2022, 22, 9995. https://doi.org/10.3390/s22249995
Nguyen K, Bryant M, Song I-H, You BH, Khaleghian S. The Application of PVDF-Based Piezoelectric Patches in Energy Harvesting from Tire Deformation. Sensors. 2022; 22(24):9995. https://doi.org/10.3390/s22249995
Chicago/Turabian StyleNguyen, Kevin, Matthew Bryant, In-Hyouk Song, Byoung Hee You, and Seyedmeysam Khaleghian. 2022. "The Application of PVDF-Based Piezoelectric Patches in Energy Harvesting from Tire Deformation" Sensors 22, no. 24: 9995. https://doi.org/10.3390/s22249995
APA StyleNguyen, K., Bryant, M., Song, I.-H., You, B. H., & Khaleghian, S. (2022). The Application of PVDF-Based Piezoelectric Patches in Energy Harvesting from Tire Deformation. Sensors, 22(24), 9995. https://doi.org/10.3390/s22249995