



Differences in Driver Behavior between Manual and Automatic Turning of an Inverted Pendulum Vehicle

Abstract
1. Introduction
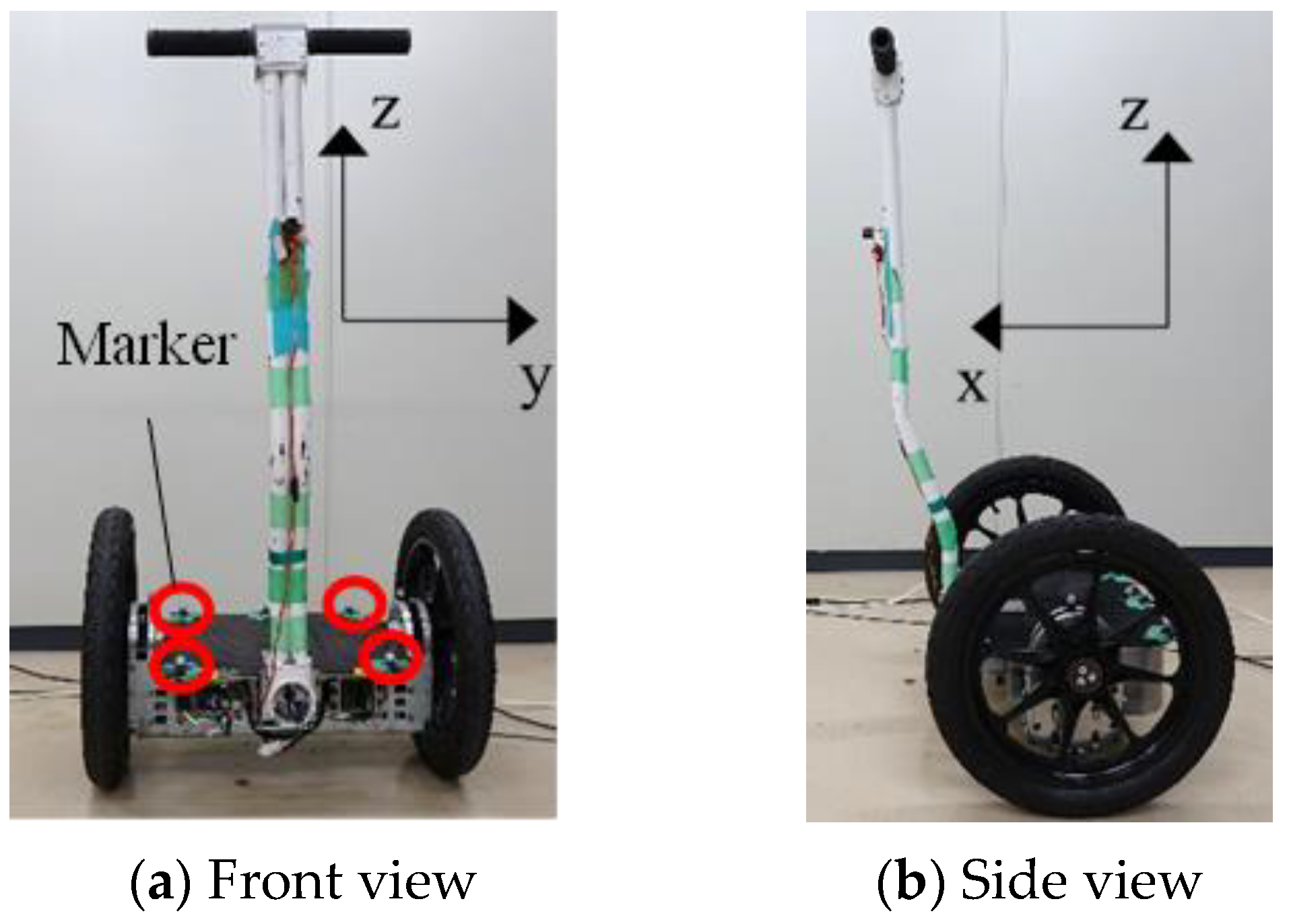
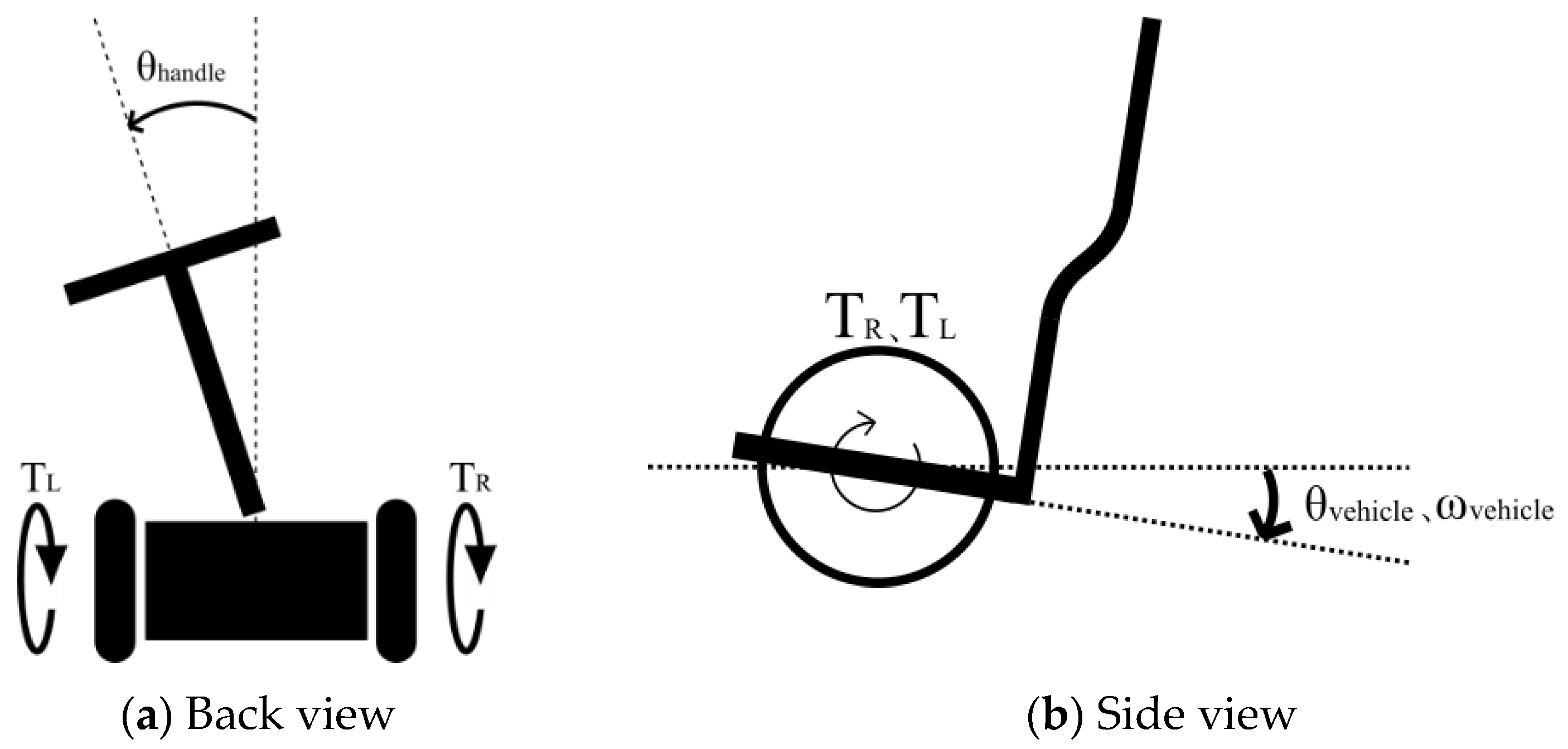
2. Experimental Vehicle and the Automatic Turning System
3. Derivation Experiment for COG/COP
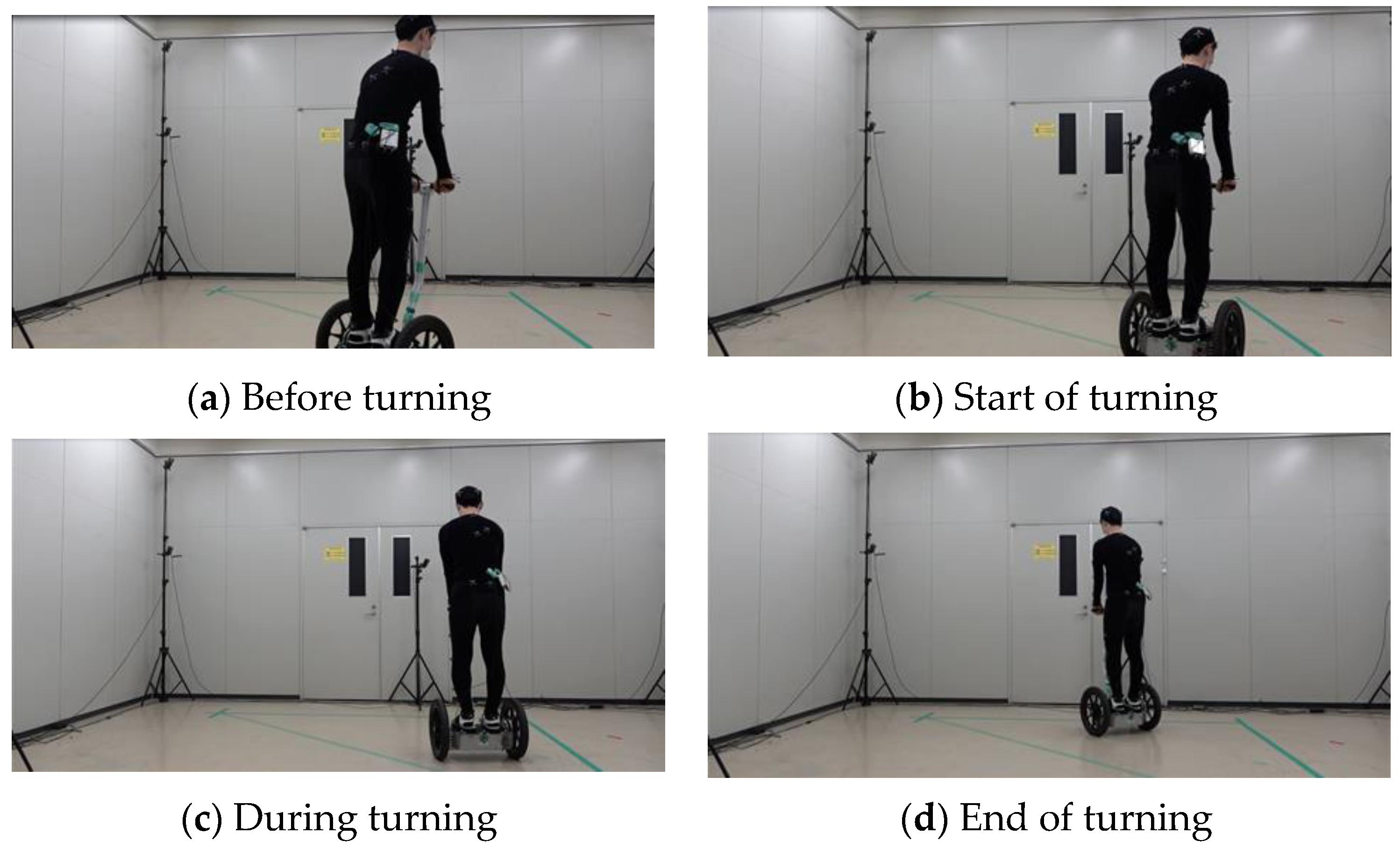
3.1. Experimental Methods and Conditions
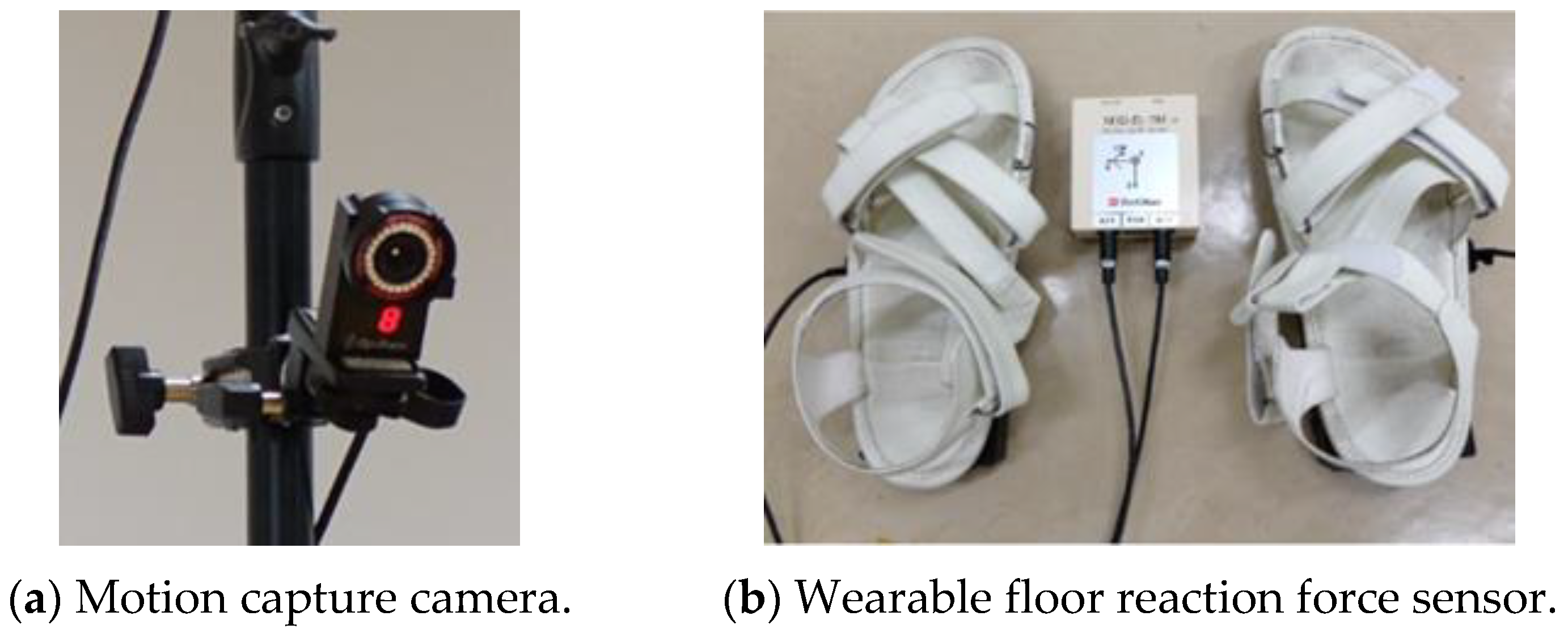
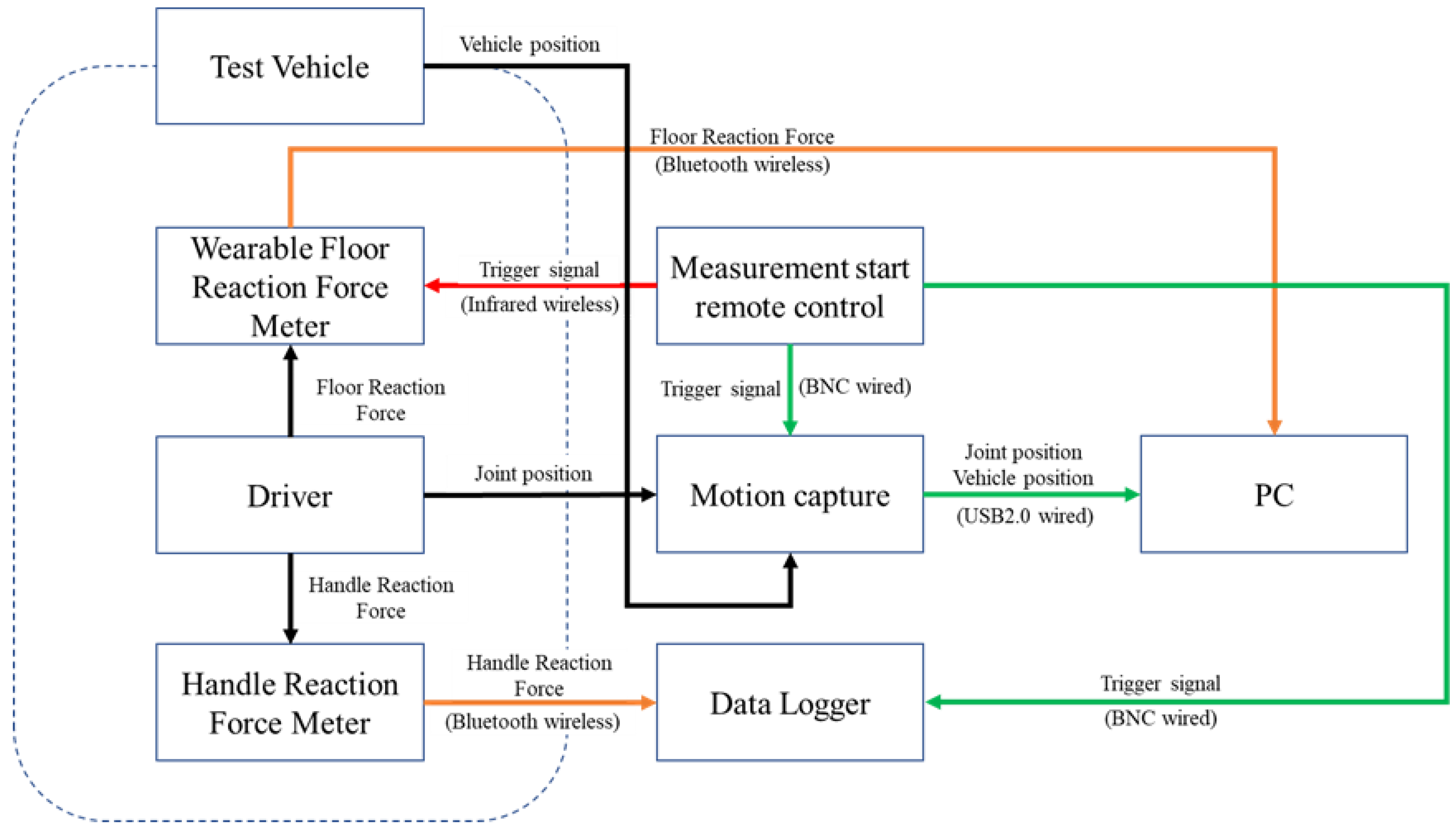
3.2. Measurement System
3.3. Analysis Methods
3.3.1. COG
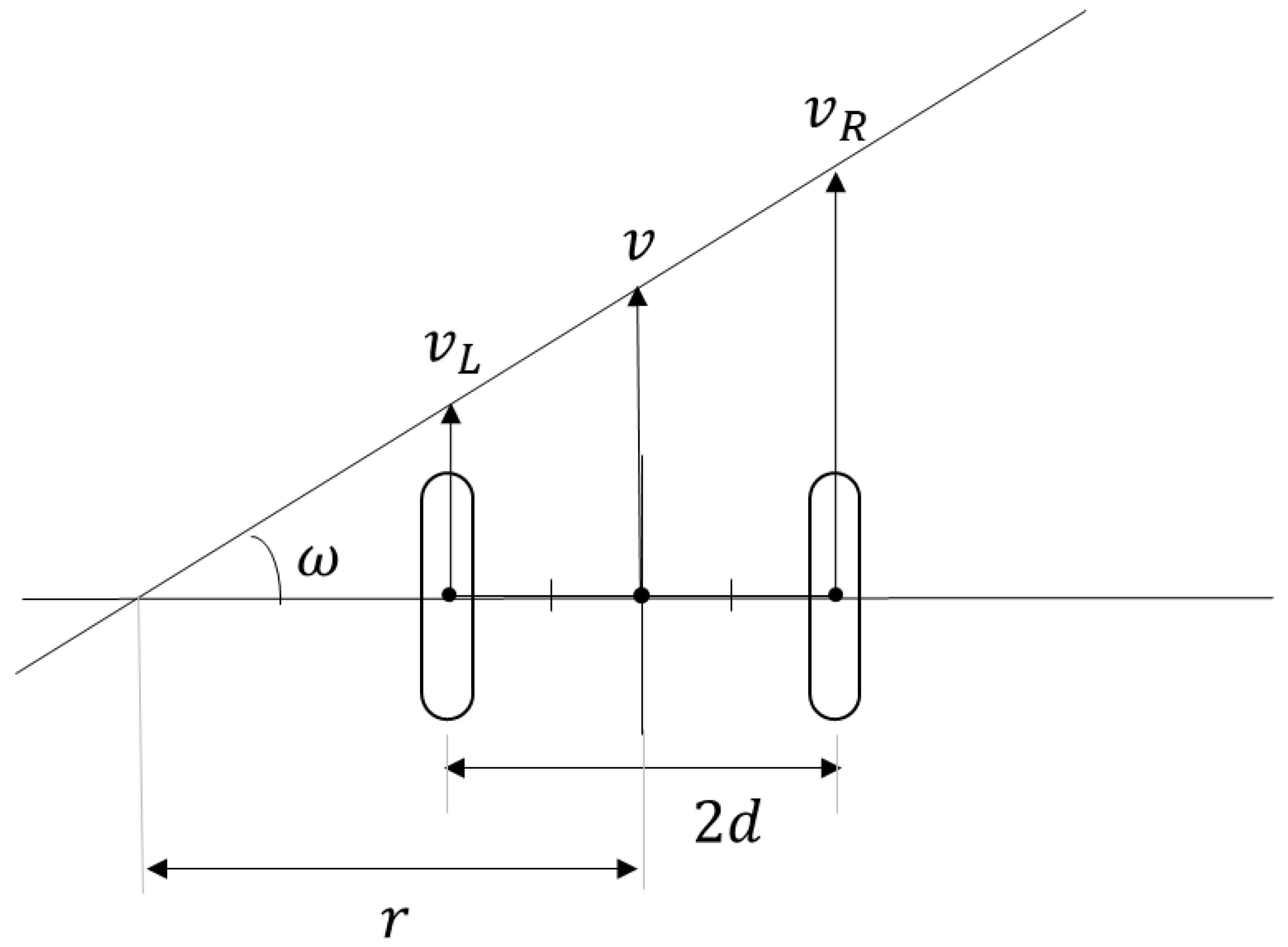
3.3.2. Centrifugal Force
3.3.3. Strength of Correlation
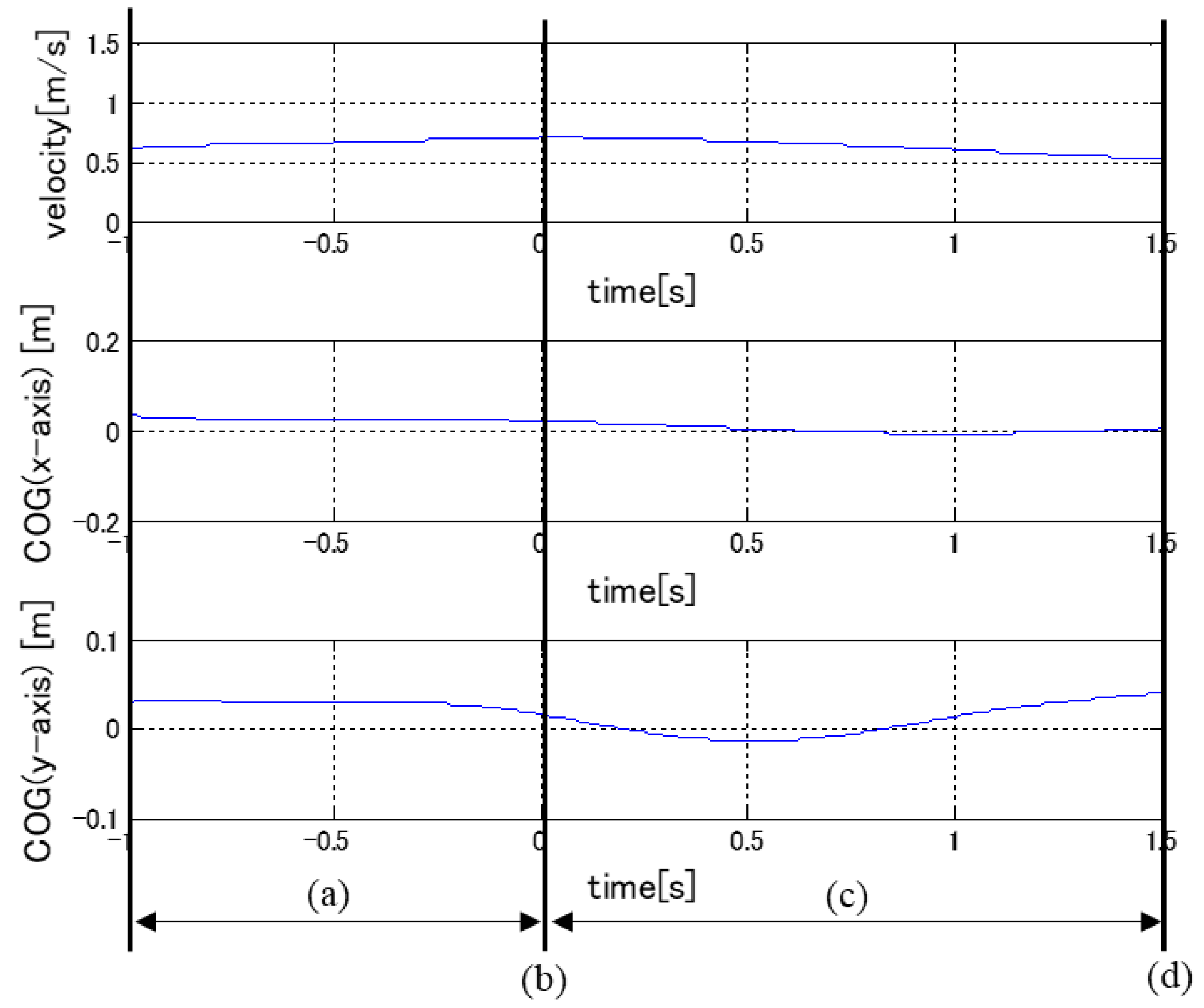
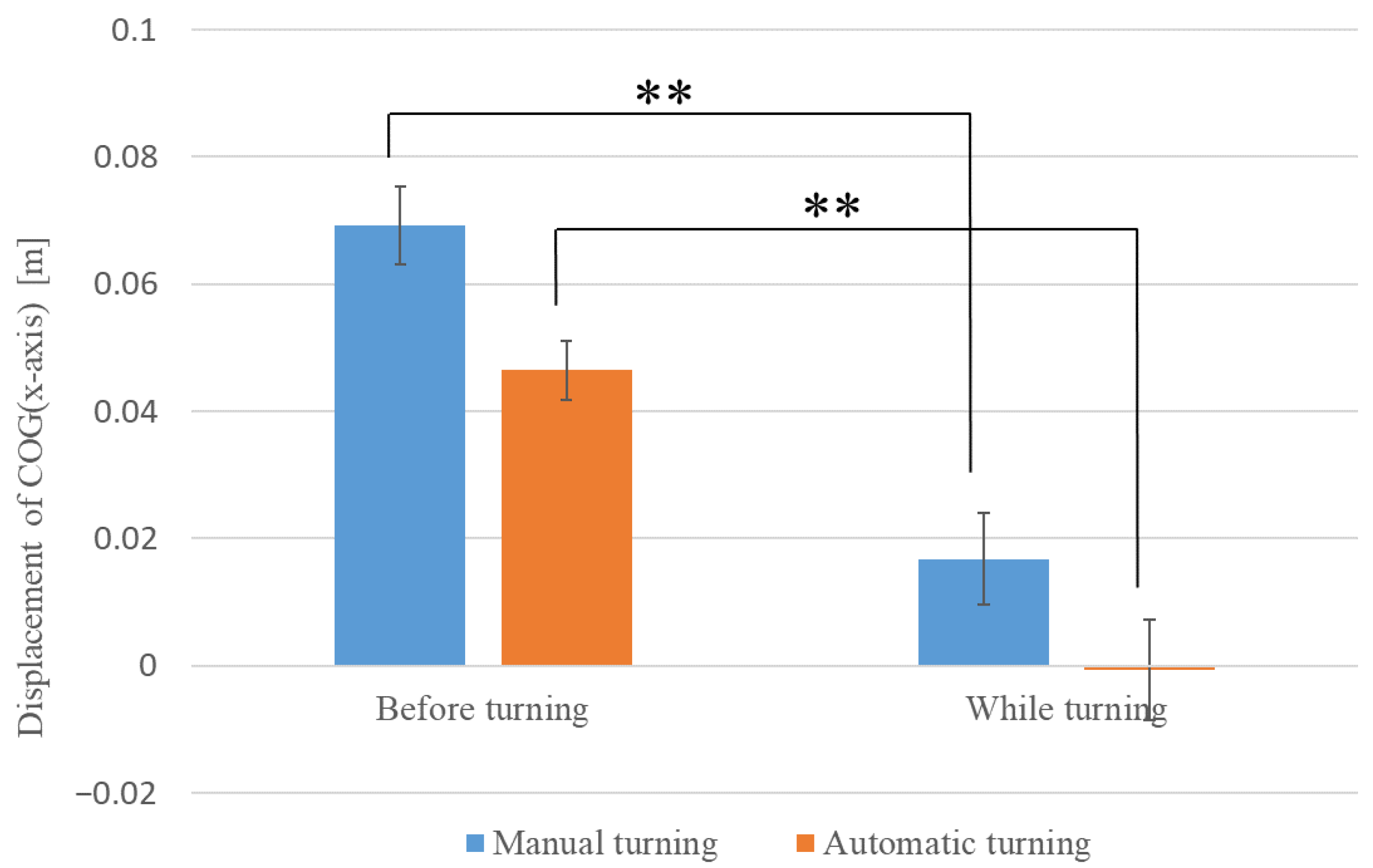
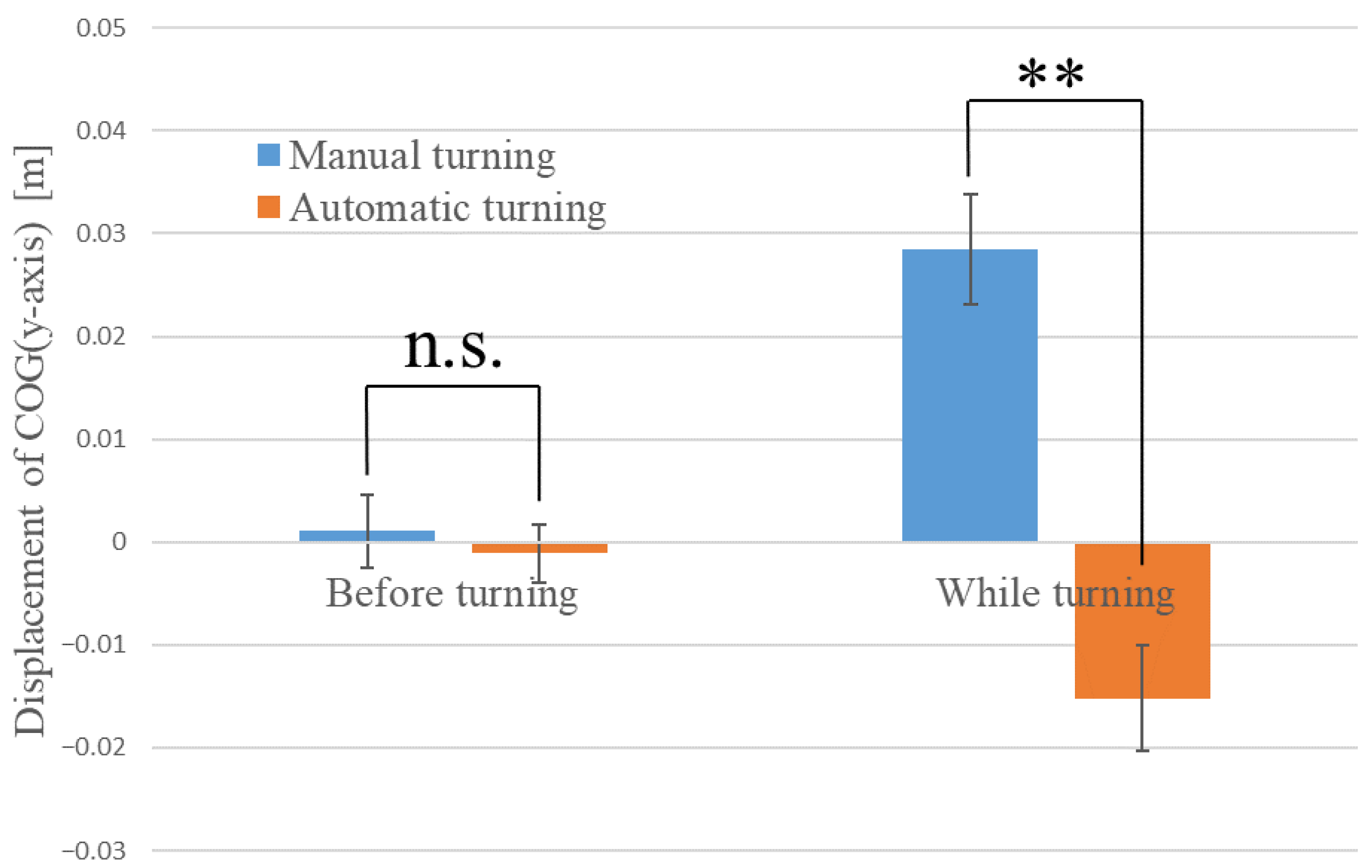
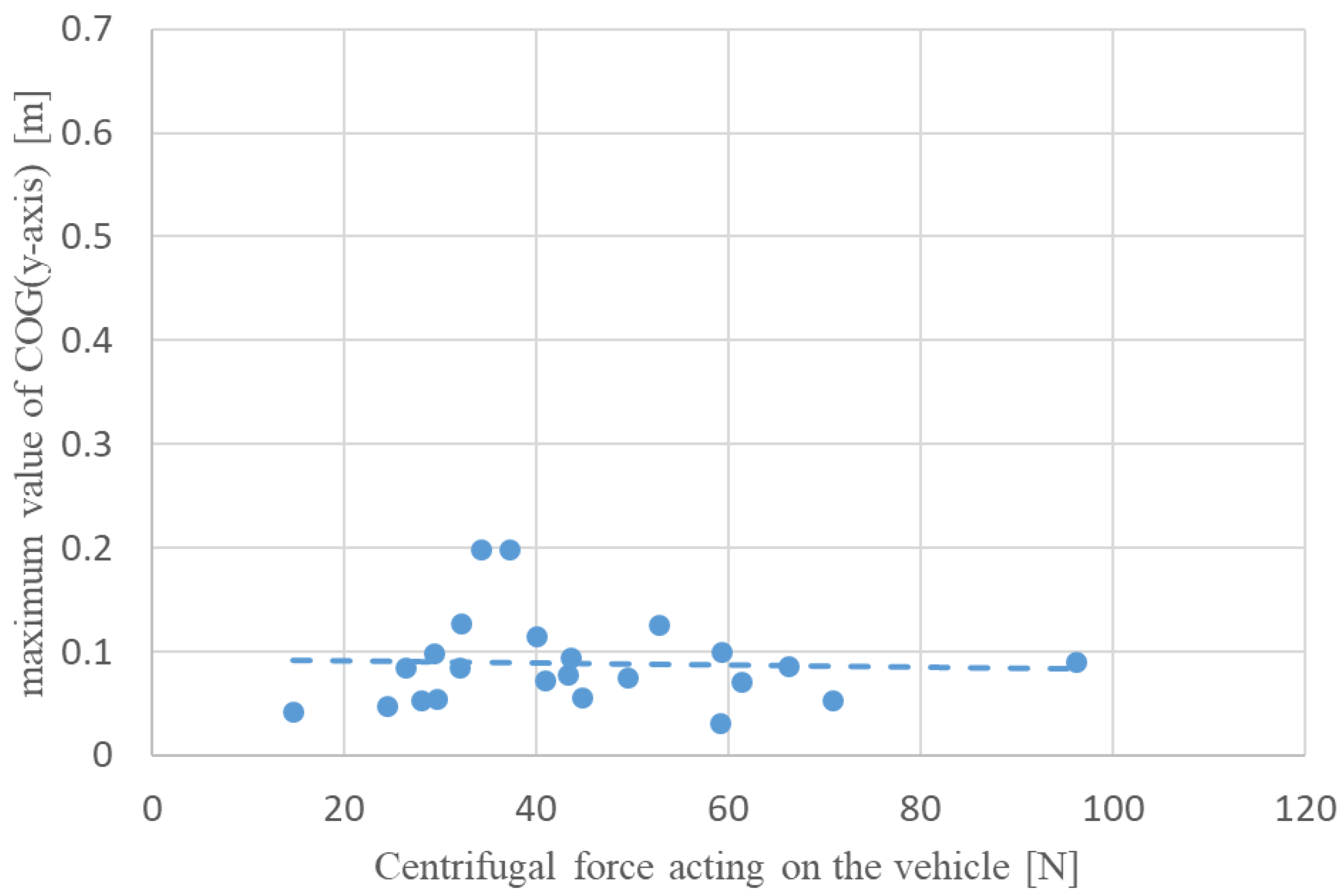
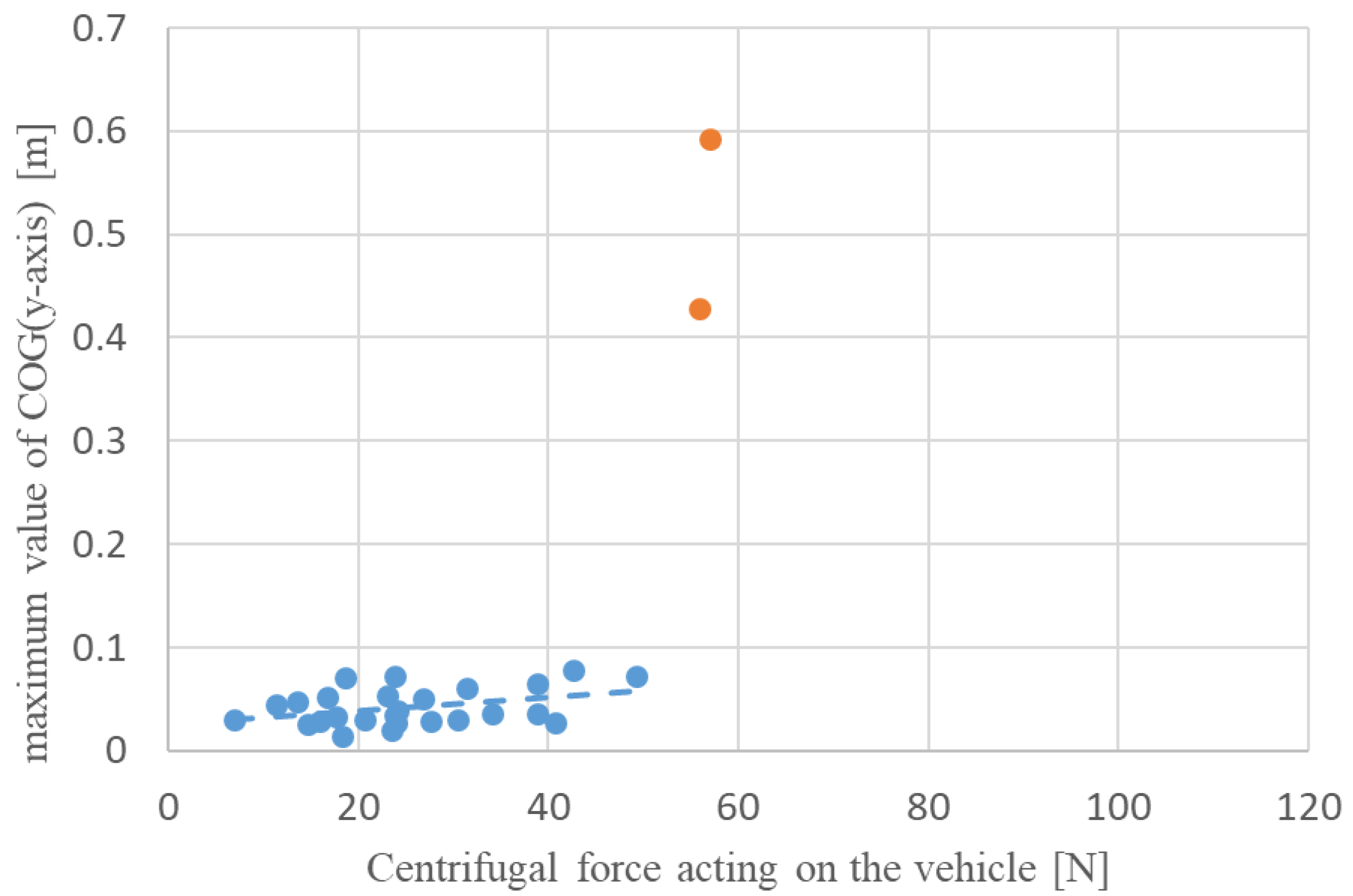
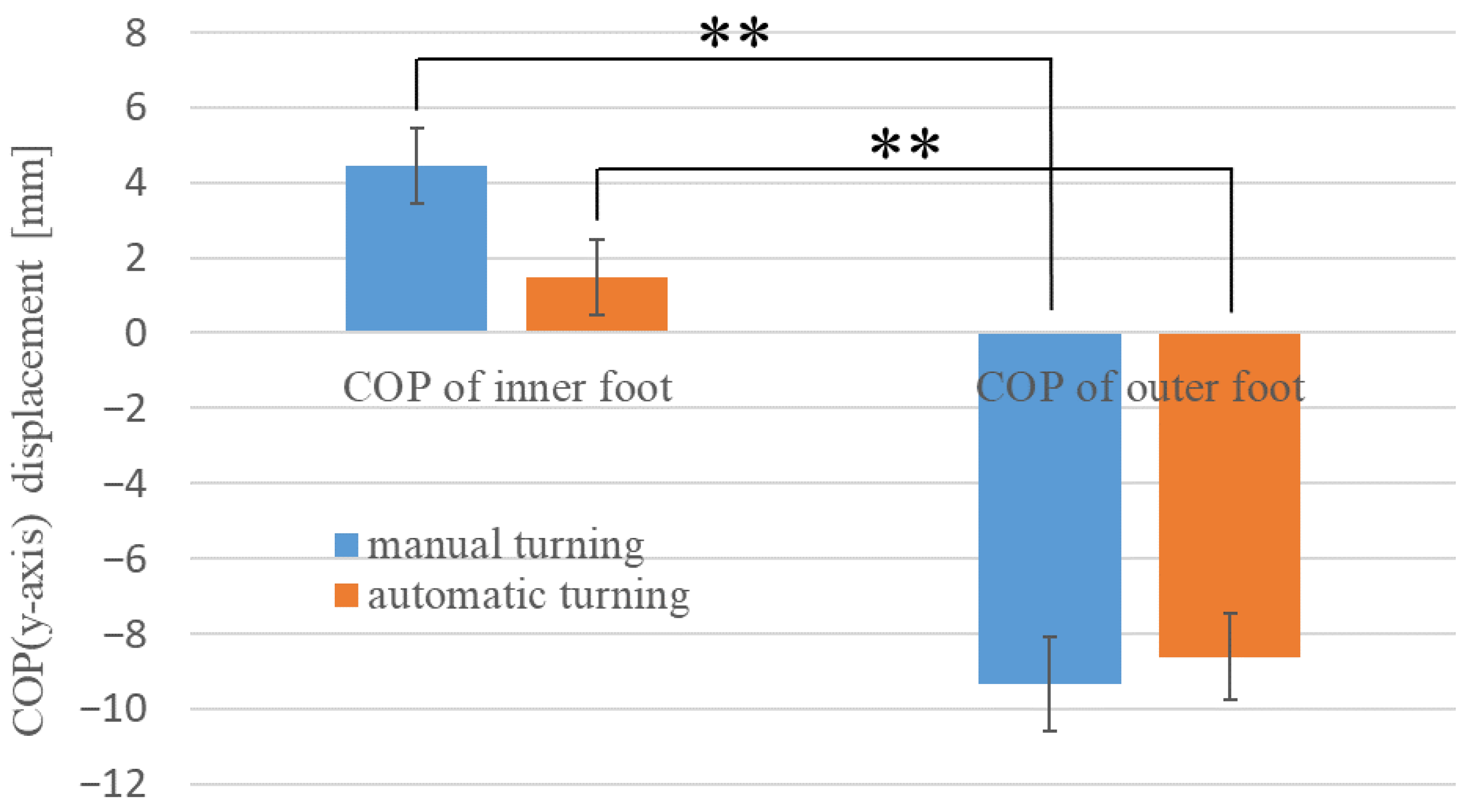
3.4. Experimental Results
4. Derivation Experiment for Joint Moments
4.1. Additional Experimental Methods and Conditions
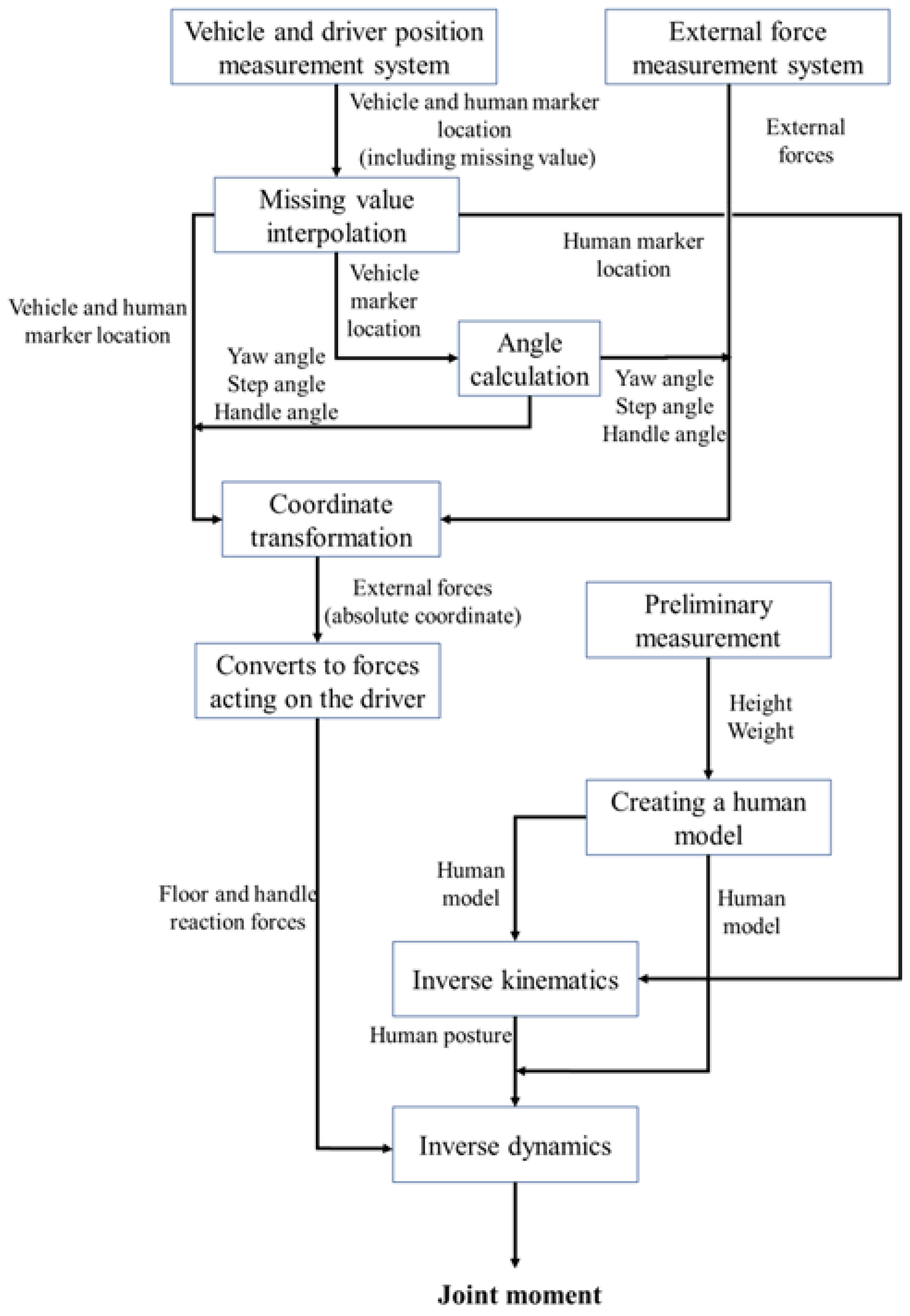
4.2. Joint Moment Estimation System
4.3. Analysis Method
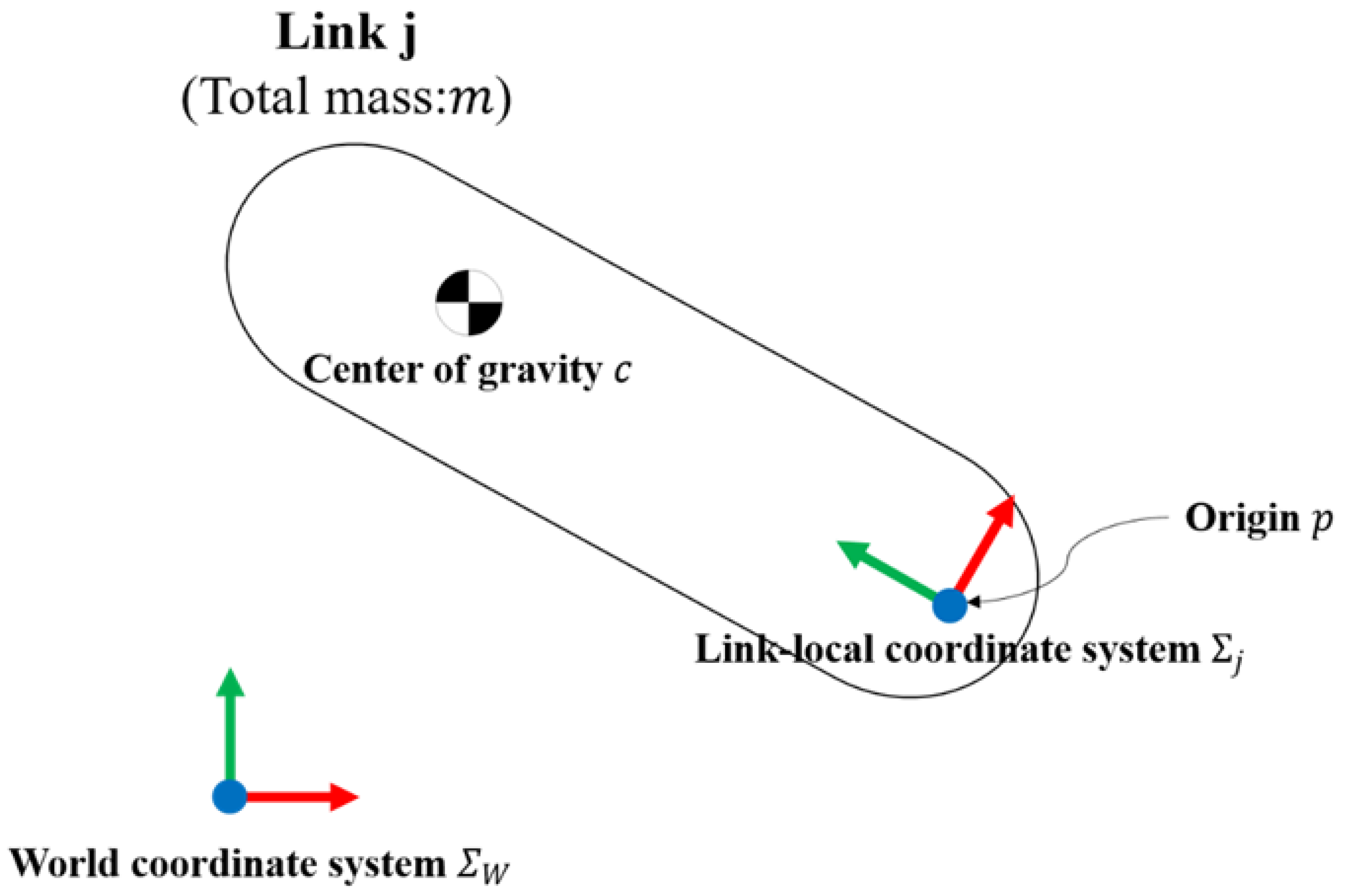
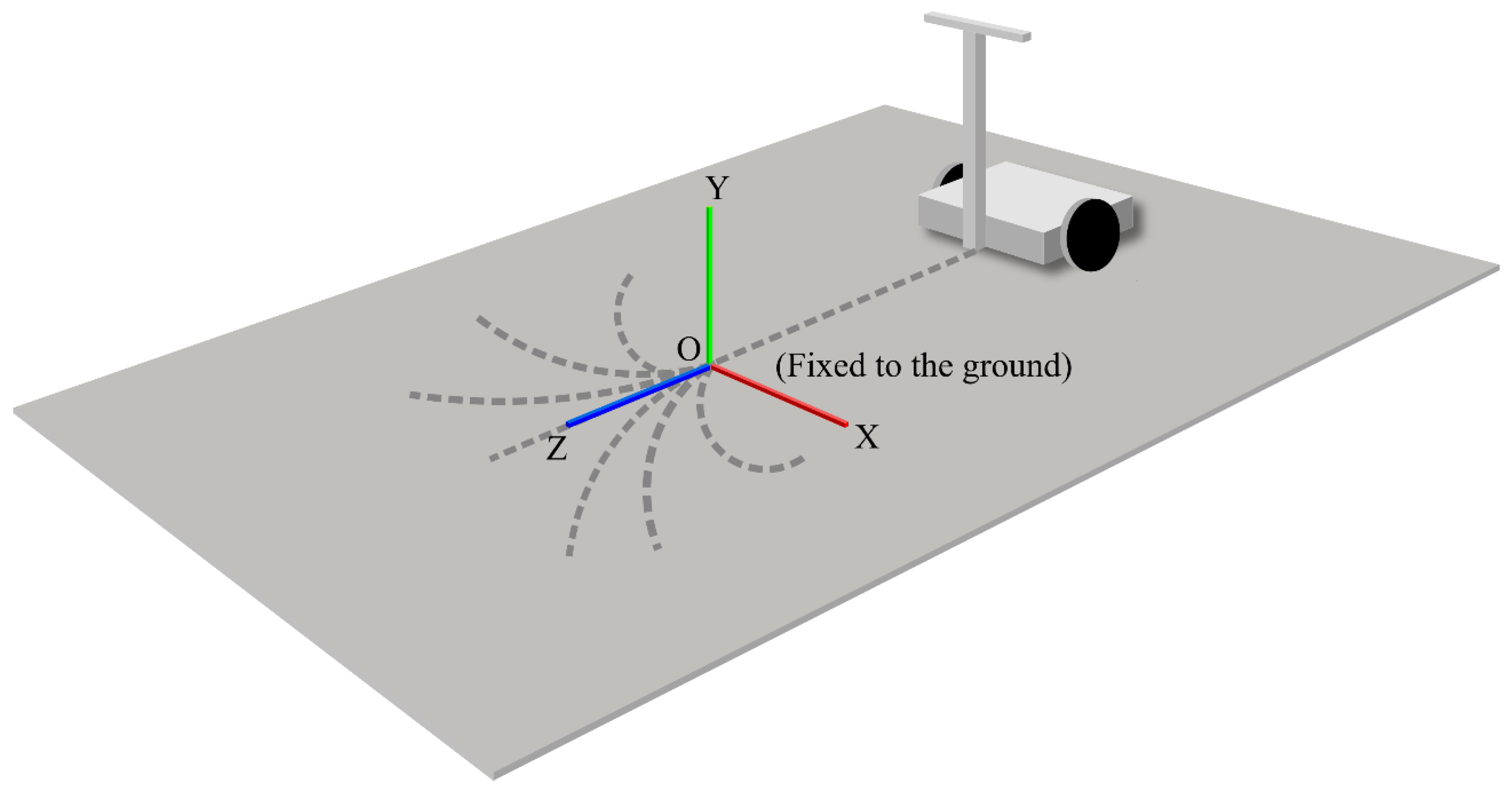
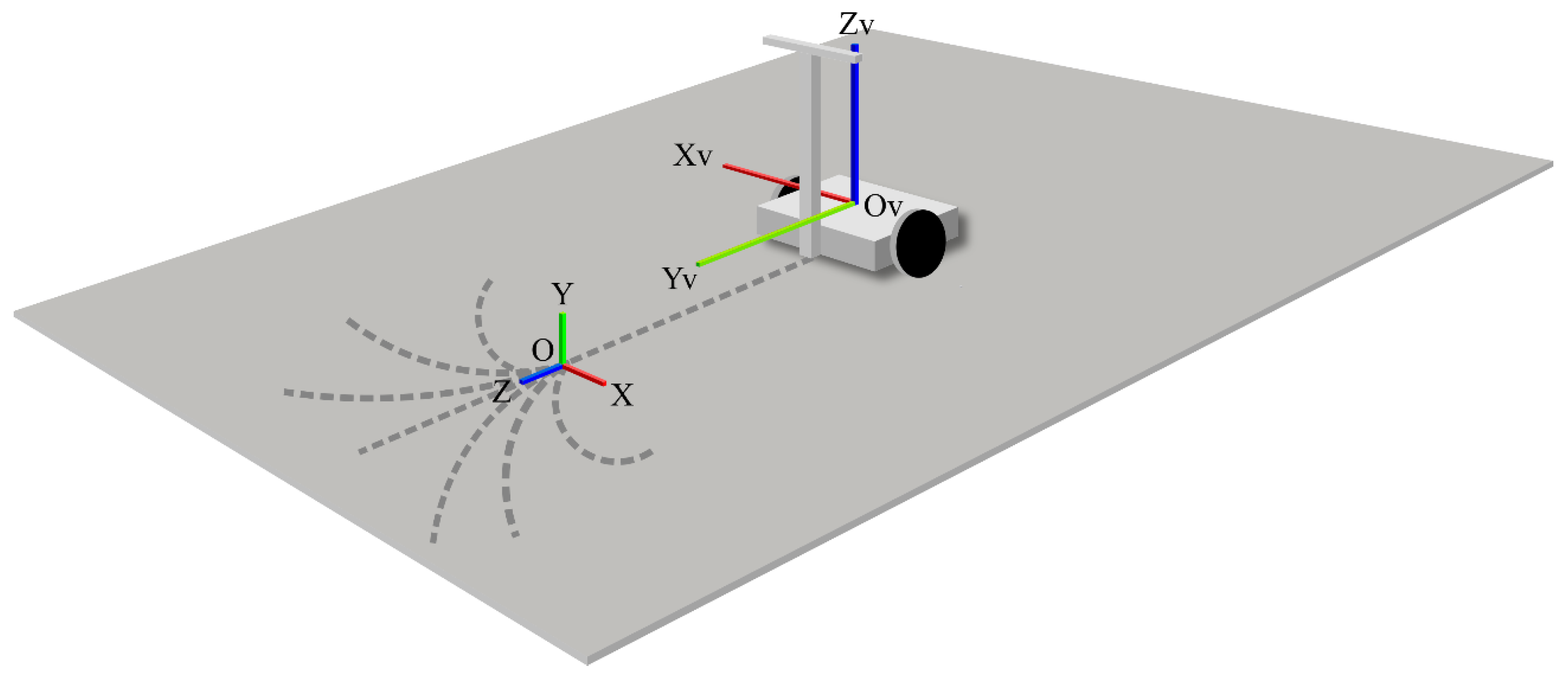
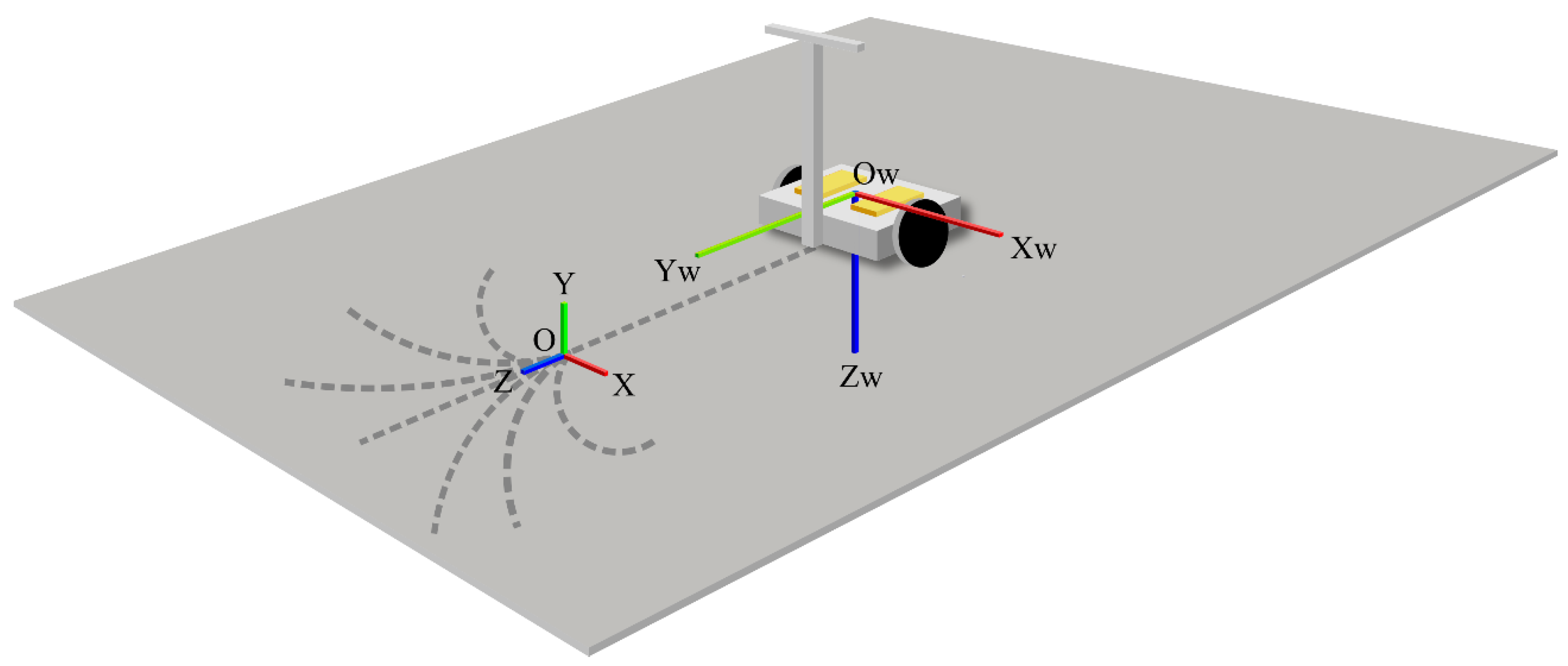
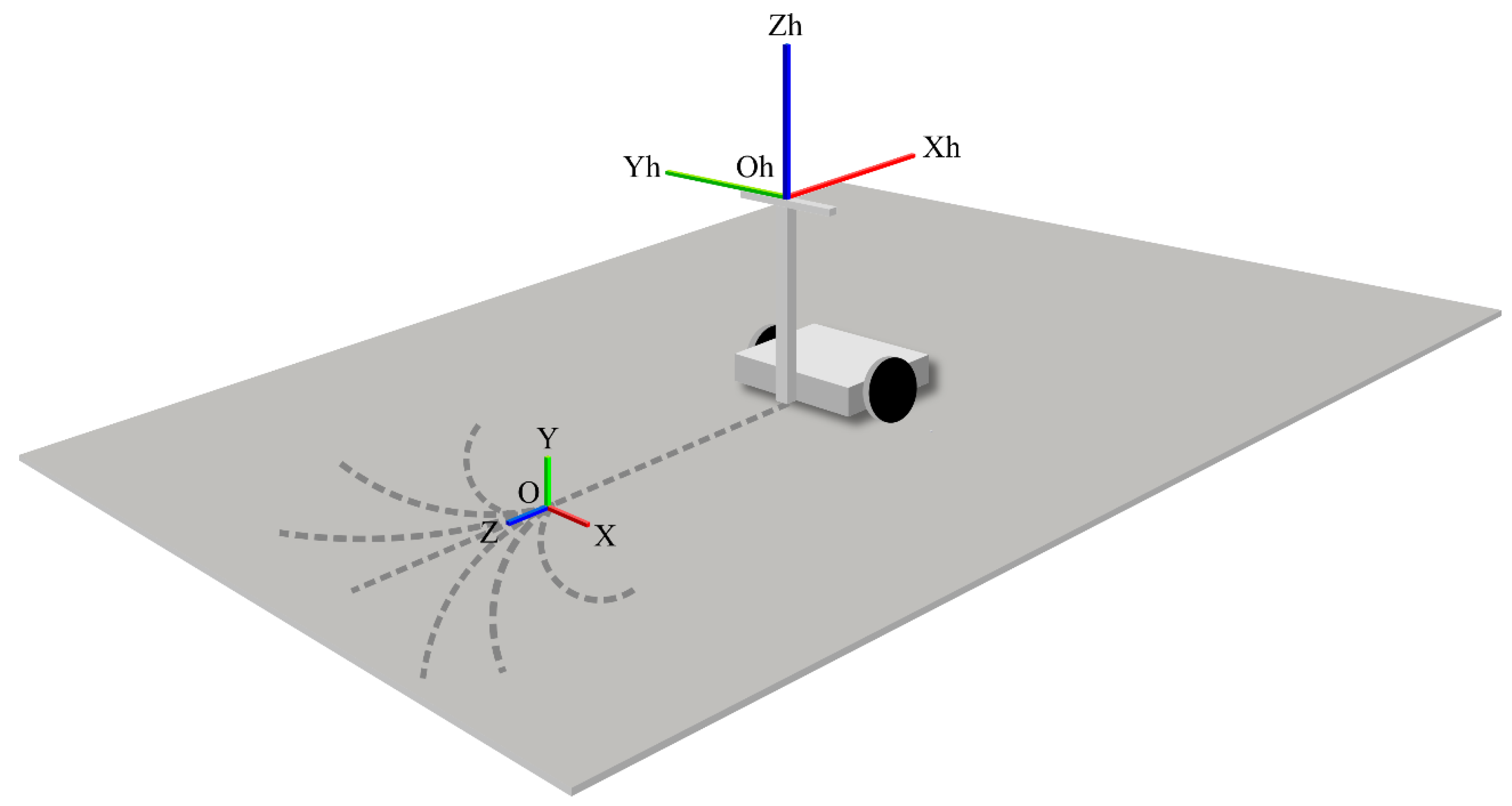
4.3.1. Definition of Coordinate Systems
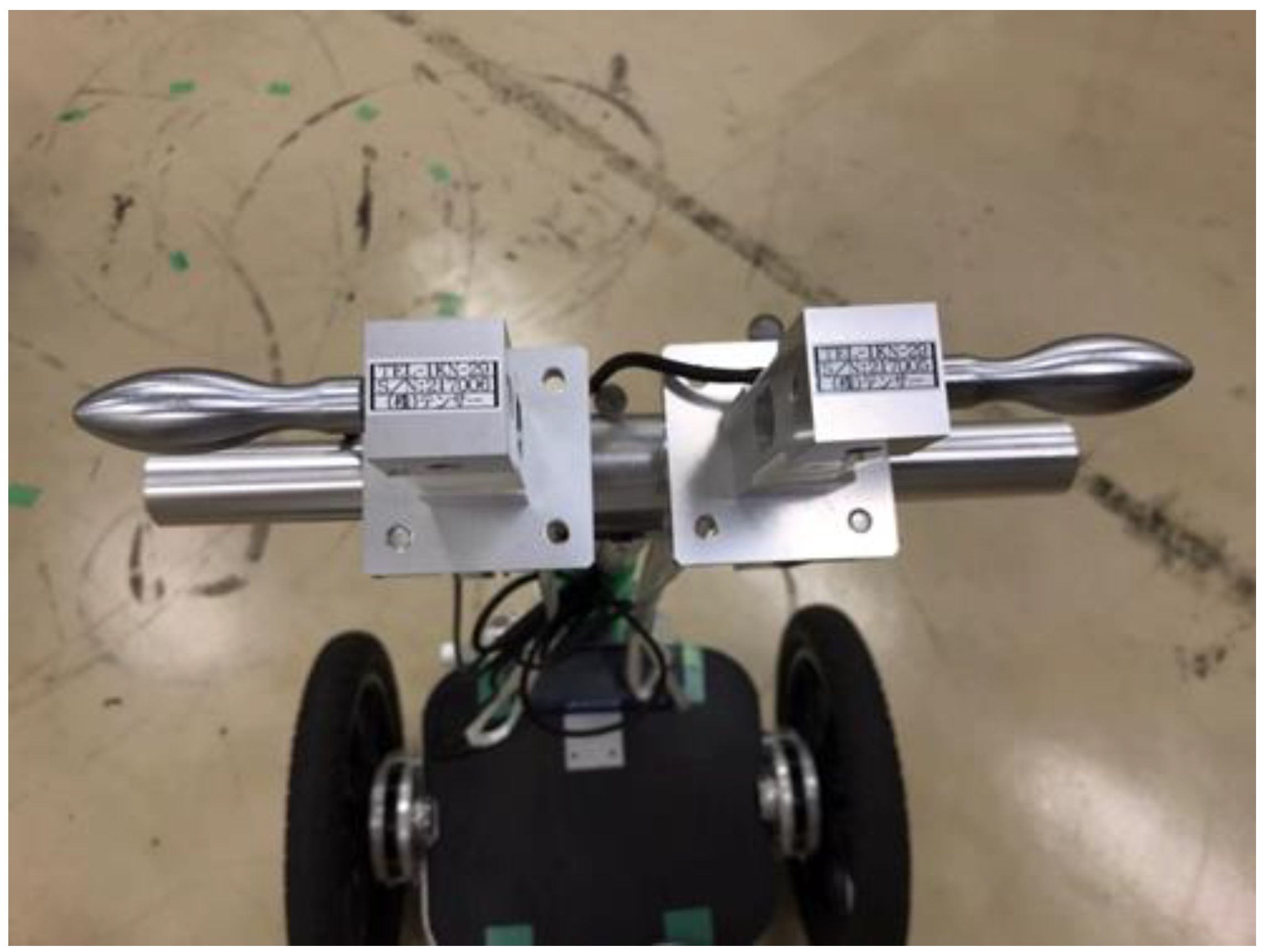
4.3.2. Calculation of External Force Using the Measuring Devices
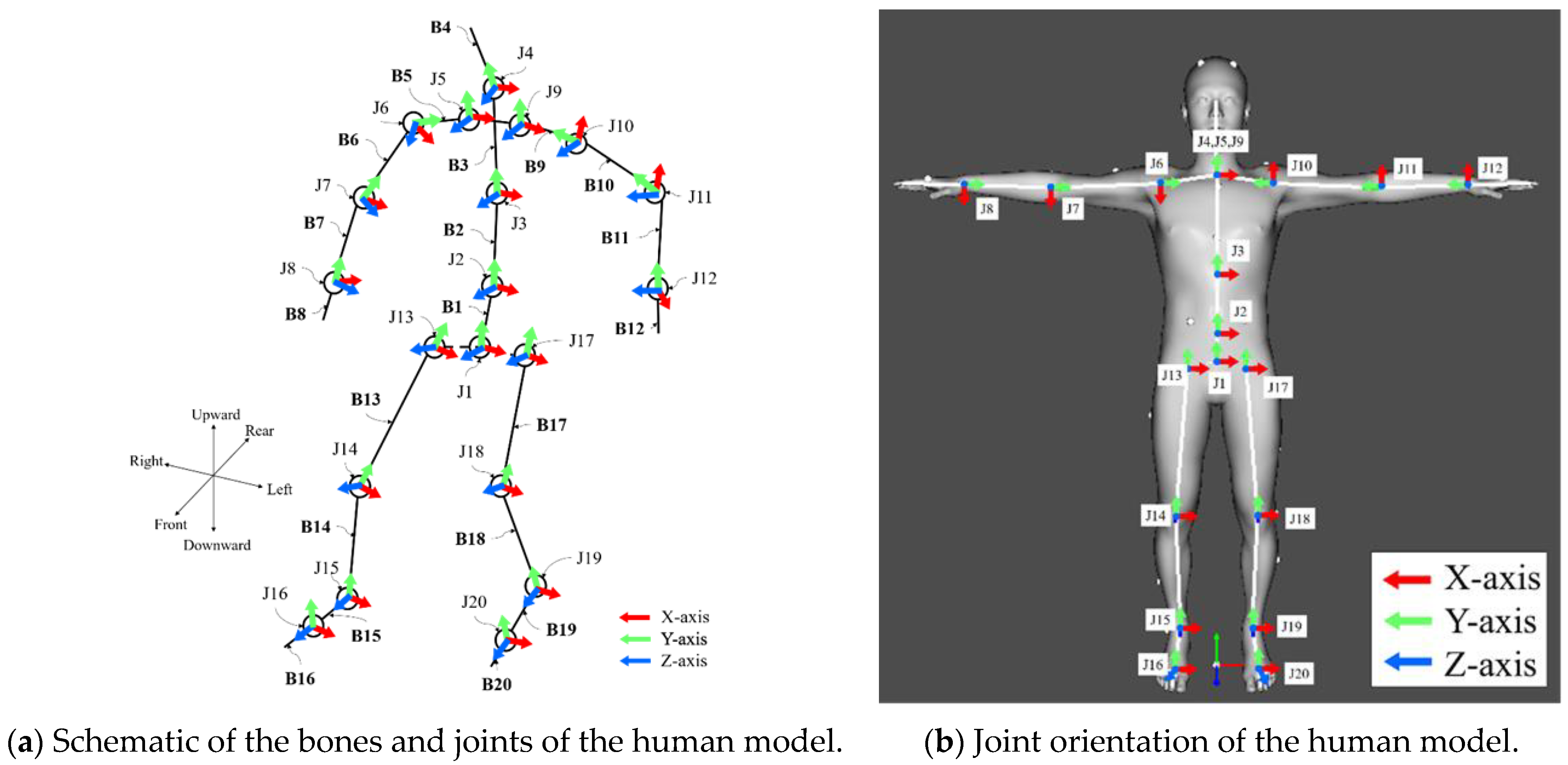
4.3.3. Human Dynamics Model
4.3.4. Inverse Kinematics Analysis
4.3.5. Inverse Dynamics Analysis
4.3.6. Calculation of Offset Values for Joint Moments
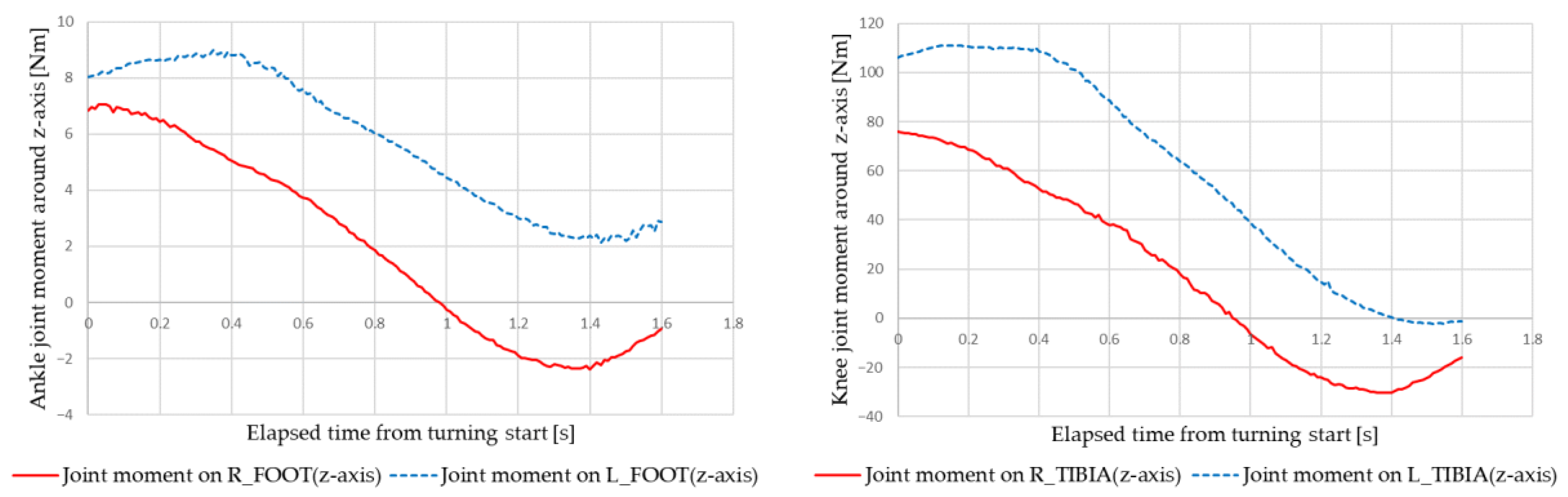
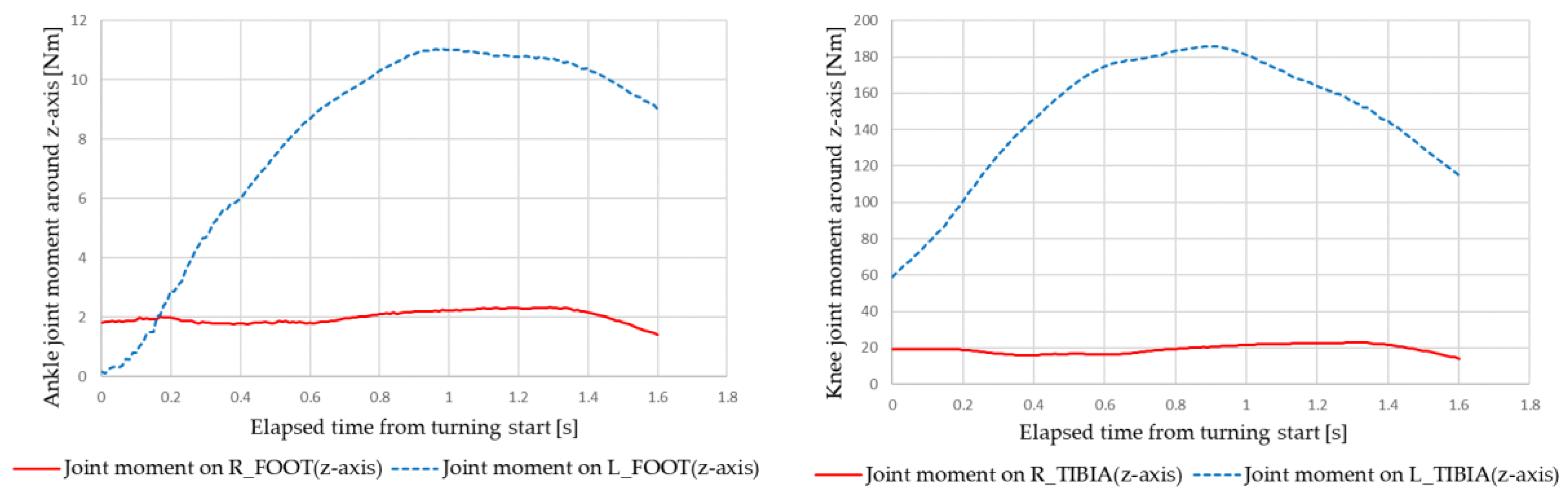
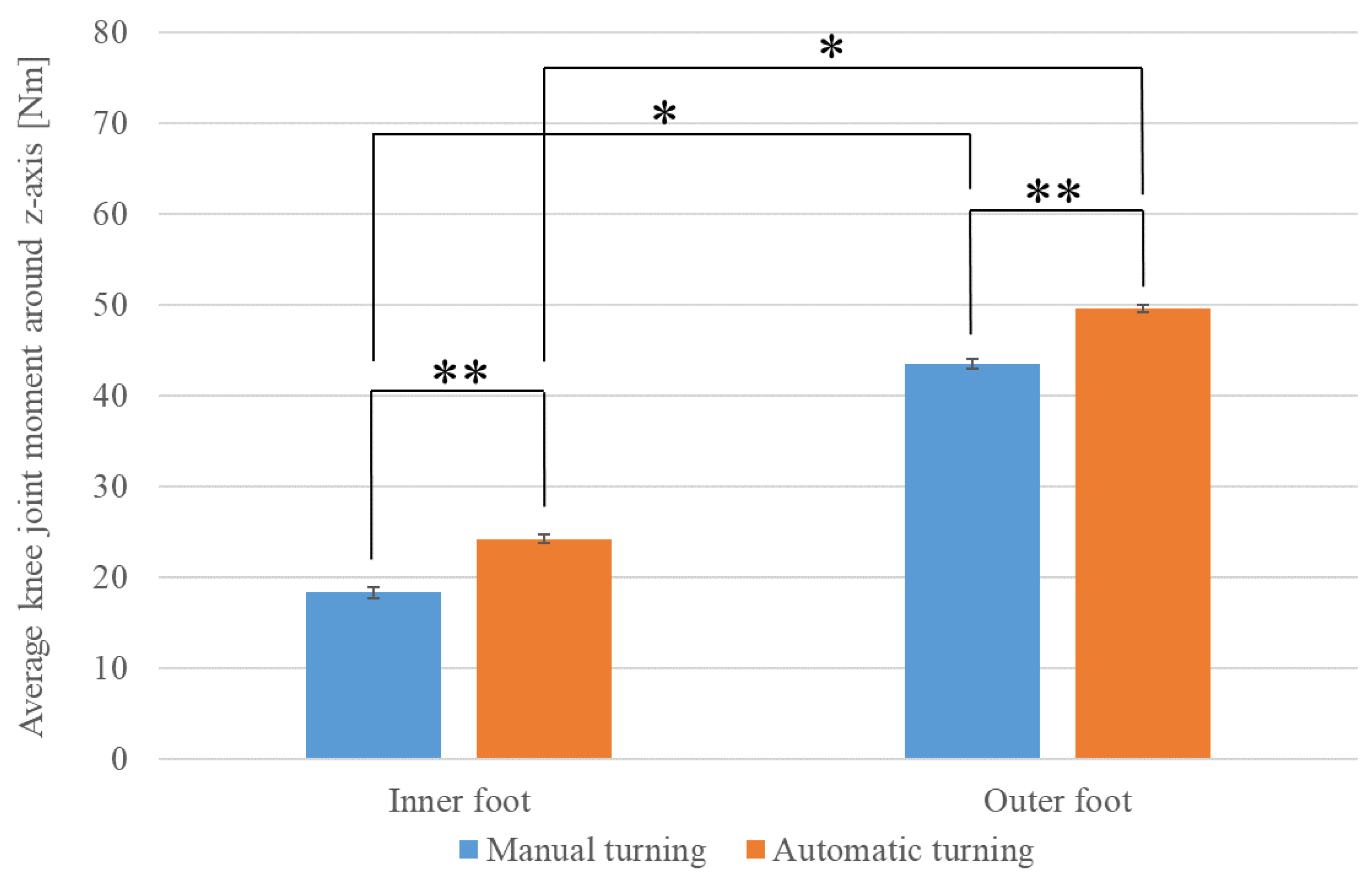
4.4. Joint Moment Estimation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Symbols | Correlation strength |
| Origin in | |
| Position vector of in | |
| Acceleration vector of in | |
| Total mass of the link | |
| Center of gravity of the link | |
| Position vector of in | |
| Position vector of in | |
| rotation matrix | |
| Inertia tensor at in | |
| Gravitational acceleration vector | |
| Angular velocity vector at in | |
| Skew-symmetric angular velocity vector at in | |
| Angular acceleration vector at in | |
| Skew-symmetric angular acceleration vector at in | |
| Joint force acting on the link | |
| Joint moment acting on the link | |
| External force acting on the link | |
| External moment acting on the link |
References
- Liu, Z.; Jiang, H.; Tan, H.; Zhao, F. An Overview of the Latest Progress and Core Challenge of Autonomous Vehicle Technologies. MATEC Web Conf. 2020, 308, 06002. [Google Scholar] [CrossRef][Green Version]
- Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. Available online: https://saemobilus.sae.org/content/j3016_202104 (accessed on 12 December 2022).
- Al-Shareeda, M.A.; Manickam, S.; Mohammed, B.A.; Al-Mekhlafi, Z.G.; Qtaish, A.; Alzahrani, A.J.; Alshammari, G.; Sallam, A.A.; Almekhlafi, K. Provably secure with efficient data sharing scheme for fifth-generation (5G)-enabled vehicular networks without road-side unit (RSU). Sustainability 2022, 14, 9961. [Google Scholar] [CrossRef]
- Al-Shareeda, M.A.; Manickam, S.; Mohammed, B.A.; Al-Mekhlafi, Z.G.; Qtaish, A.; Alzahrani, A.J.; Alshammari, G.; Sallam, A.A.; Almekhlafi, K. CM-CPPA: Chaotic map-based conditional privacy-preserving authentication scheme in 5G-enabled vehicular networks. Sensors 2022, 22, 5026. [Google Scholar] [CrossRef]
- Al-Shareeda, M.A.; Manickam, S.; Mohammed, B.A.; Al-Mekhlafi, Z.G.; Qtaish, A.; Alzahrani, A.J.; Alshammari, G.; Sallam, A.A.; Almekhlafi, K. Chebyshev polynomial-based scheme for resisting side-channel attacks in 5G-enabled vehicular networks. Appl. Sci. 2022, 12, 5939. [Google Scholar] [CrossRef]
- Ni, J.; Shen, K.; Chen, Y.; Cao, W.; Yang, S.X. An improved deep network-based scene classification method for self-driving cars. IEEE Trans. Instrum. Meas. 2022, 71, 1–14. [Google Scholar] [CrossRef]
- Cummings, M.L.; Bauchwitz, B. Safety implications of variability in autonomous driving assist alerting. IEEE Trans. Intell. Transp. Syst. 2022, 23, 12039–12049. [Google Scholar] [CrossRef]
- Schneider, E.N.; Buchheit, B.; Flotho, P.; Bhamborae, M.J.; Corona-Strauss, F.I.; Dauth, F.; Alayan, M.; Strauss, D.J. Electrodermal responses to driving maneuvers in a motion sickness inducing real-world driving scenario. IEEE Trans. Hum. Mach. Syst. 2022, 52, 994–1003. [Google Scholar] [CrossRef]
- Ali, F.; Khan, Z.H.; Khan, F.A.; Khattak, K.S.; Gulliver, T.A. A new driver model based on driver response. Appl. Sci. 2022, 12, 5390. [Google Scholar] [CrossRef]
- Chen, Y.; Li, G.; Li, S.; Wang, W.; Li, S.E.; Cheng, B. Exploring behavioral patterns of lane change maneuvers for human-like autonomous driving. IEEE Trans. Intell. Transp. Syst. 2022, 23, 14322–14335. [Google Scholar] [CrossRef]
- Fujikawa, T.; Ishikawa, M.; Nakajima, S. Mobility support system for personal mobility vehicles. J. Robot. Mechatron. 2015, 27, 715–716. [Google Scholar] [CrossRef]
- Dowling, R.; Irwin, J.; Faulks, I.; Howitt, R. Use of Personal Mobility Devices for First-and-last Mile Travel: The Macquarie-Ryde Trial. In Proceedings of the Australian Road Safety Conference (1st: 2015), Gold Coast, Australia, 14–16 October 2015. [Google Scholar]
- Li, Y.; Voege, T. Mobility as a service (MaaS): Challenges of implementation and policy required. J. Transp. Technol. 2017, 7, 95–106. [Google Scholar] [CrossRef]
- Grasser, F.; D’rrigo, A.; Colombi, S.; Rufer, A.C. JOE: A mobile, inverted pendulum. IEEE Trans. Ind. Electron. 2002, 49, 107–114. [Google Scholar] [CrossRef]
- Matsubara, H.; Nagatsu, Y.; Hashimoto, H. Stabilization control of inverted two-wheeled luggage transport vehicle using a Kalman filter-based disturbance observer. J. Robot. Mechatron. 2021, 33, 643–652. [Google Scholar] [CrossRef]
- Shi, Q.; Fang, Z.; She, J.; Imani, J.; Ohyama, Y. Motion control of a wheeled inverted pendulum using equivalent-input-disturbance approach. J. Adv. Comput. Intell. Intell. Inform. 2015, 19, 293–300. [Google Scholar] [CrossRef]
- Taniguchi, F.; Nakagawa, C.; Shintani, A.; Ito, T. Experimental study of automatic braking properties using an ultrasonic sensor for inverted pendulum vehicles (Proposal of the safety system by using the TTC as the indicator). Trans. JSME 2018, 84. [Google Scholar] [CrossRef]
- Azuma, S.; Ichihara, H.; Urakubo, T.; Otsuka, T.; Kai, T.; Kawata, M.; Kunimatsu, S.; Sawada, K.; Nagahara, M.; Minami, Y. Control Engineering Learned with the Inverted Pendulum, 1st ed.; Morikita, H., Ed.; Morikita Publishing Co., Ltd.: Tokyo, Japan, 2017; pp. 3–24. [Google Scholar]
- Kondo, H.; Ogura, Y.; Shimomura, K.; Momoki, S.; Okubo, T.; Lim, H.; Takanishi, A. Emulation of human walking by biped humanoid robot with heel-contact and toe-off motion. J. Robot. Mechatron. 2008, 20, 739–749. [Google Scholar] [CrossRef]
- Ae, M.; Tang, H.; Yokoi, T. Estimation of inertia properties of the body segments in Japanese athletes. Biomechanisms 1992, 11, 23–33. [Google Scholar] [CrossRef]
- Guilford, J.P. Fundamental Statistics in Psychology and Education; McGraw-Hill: New York, NY, USA, 1965. [Google Scholar]
- Welch, B.L. The significance of the difference between two means when the population variances are unequal. Biometrika 1938, 29, 350–362. [Google Scholar] [CrossRef]
- Delp, S.L.; Anderson, F.C.; Arnold, A.S. OpenSim: Open-source software to create and analyze dynamic simulations of movement. IEEE Trans. Biomed. Eng. 2007, 54, 1940–1950. [Google Scholar] [CrossRef] [PubMed]
- Hase, K.; Yamazaki, N. Computer simulation study of human locomotion with a three-dimensional entire-body neuro-musculo-skeletal model. JSME Int. J. Ser. C 2002, 45, 1040–1050. [Google Scholar] [CrossRef]
- Sardain, P.; Bessonnet, G. Gait analysis of a human walker wearing robot feet as shoes. In Proceedings of the 2001 ICRA IEEE International Conference on Robotics and Automation (Cat. No.01CH37164), Seoul, Republic of Korea, 21–26 May 2001; Volume 3, pp. 2285–2292. [Google Scholar]
- Purwanto, P.E.; Toyama, S.; Kamijima, A. Modeling of knee joint in the human lower extremity by using cam-follower and revolute-translational composite joint. J. Robot. Mechatron. 1996, 8, 211–216. [Google Scholar] [CrossRef]
- Endo, Y.; Tada, M.; Mochimaru, M. Development of virtual ergonomic assessment system with human models. In Proceedings of the 3rd International Digital Human Symposium, Tokyo, Japan, 20–22 May 2014. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | Value |
|---|---|
| Maximum velocity | 10 km/h |
| Cruising range | 10–15 km |
| Mass | 30 kg |
| Length × Width | 45 cm × 52.5 cm |
| Limitation of mass | 20–80 kg |
| Output of motor | 450 × 2 W |
| Feedback gains | 32 | 6.6 | 1.0 |
| Correlation Coefficient | Correlation Strength |
|---|---|
| High | |
| Moderate | |
| Low | |
| Slight |
| Bone Index | Bone Name | Bone Index | Bone Name |
|---|---|---|---|
| B1 | PELVIS | B11 | L_ULNA |
| B2 | SPINE | B12 | L_HAND |
| B3 | STERNUM | B13 | R_FEMUR |
| B4 | NECK | B14 | R_TIBIA |
| B5 | R_CLAVICLE | B15 | R_FOOT |
| B6 | R_HUMERUS | B16 | R_TOE |
| B7 | R_ULNA | B17 | L_FEMUR |
| B8 | R_HAND | B18 | L_TIBIA |
| B9 | L_CLAVICLE | B19 | L_FOOT |
| B10 | L_HUMERUS | B20 | L_TOE |
| Bone Index | Bone Name | Bone Index | Bone Name |
|---|---|---|---|
| J1 | Joint of PELVIS | J11 | Joint of L_ULNA |
| J2 | Joint of SPINE | J12 | Joint of L_HAND |
| J3 | Joint of STERNUM | J13 | Joint of R_FEMUR |
| J4 | Joint of NECK | J14 | Joint of R_TIBIA |
| J5 | Joint of R_CLAVICLE | J15 | Joint of R_FOOT |
| J6 | Joint of R_HUMERUS | J16 | Joint of R_TOE |
| J7 | Joint of R_ULNA | J17 | Joint of L_FEMUR |
| J8 | Joint of R_HAND | J18 | Joint of L_TIBIA |
| J9 | Joint of L_CLAVICLE | J19 | Joint of L_FOOT |
| J10 | Joint of L_HUMERUS | J20 | Joint of L_TOE |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nakagawa, C.; Yamada, S.; Hirata, D.; Shintani, A. Differences in Driver Behavior between Manual and Automatic Turning of an Inverted Pendulum Vehicle. Sensors 2022, 22, 9931. https://doi.org/10.3390/s22249931
Nakagawa C, Yamada S, Hirata D, Shintani A. Differences in Driver Behavior between Manual and Automatic Turning of an Inverted Pendulum Vehicle. Sensors. 2022; 22(24):9931. https://doi.org/10.3390/s22249931
Chicago/Turabian StyleNakagawa, Chihiro, Seiya Yamada, Daichi Hirata, and Atsuhiko Shintani. 2022. "Differences in Driver Behavior between Manual and Automatic Turning of an Inverted Pendulum Vehicle" Sensors 22, no. 24: 9931. https://doi.org/10.3390/s22249931
APA StyleNakagawa, C., Yamada, S., Hirata, D., & Shintani, A. (2022). Differences in Driver Behavior between Manual and Automatic Turning of an Inverted Pendulum Vehicle. Sensors, 22(24), 9931. https://doi.org/10.3390/s22249931