
Energy and Environment-Aware Path Planning in Wireless Sensor Networks with Mobile Sink



Abstract
1. Introduction
2. Related Work
- -
- They ignore environmental consequences. Environmental factors may cause sensor and sink nodes to fail, causing the network to malfunction. Neglecting this challenge might make them unable to adapt to environmental changes like wildfires and rainstorms, impairing network performance. Few research publications have explored the external environment’s detrimental influence on data fusion and delivery [13,14]. Unfortunately, up to our knowledge, no research paper has studied the data collection problem of WSNs with mobile sinks under harsh environmental conditions;
- -
- They ignored zone priority. Messages coming from sensor nodes located in high-priority zones should be transmitted immediately to the sink node. Hence, ignoring zone priority could increase urgent data delivery delay and failure rate, which negatively affects the latency and/or throughput of a high-priority data flow;
- -
- They overlook the dependability of data transmission. WSNs depend on reliable data transfer. Ignoring such concerns might increase packet loss, waste energy, and delay packet retransmission. This clearly impacts network efficiency;
- -
- They miss real-time data transmission. Real-time delivery of data is difficult in WSNs. Transmission of crucial real-time data within a predetermined deadline enables prompt action, whereas late delivery reduces the efficacy of the action done. Ignoring this problem might increase missed deadlines and packet drops. Table 1 provides an overall comparison of the algorithms mentioned earlier [18,19,20,21,22,23,24] and the proposed ones.
- We present a unique data collecting path planning technique that considers environmental effect parameters to reduce mobile sink environmental impact. It achieves this by calculating each node’s environmental effect. Then, it avoids cluster heads in dangerous zones by choosing cluster heads with a higher final environmental impact measure to participate in path planning. Moreover, the zone priority is considered to avoid the excessive routing of urgent data, which would negatively influence the latency and/or throughput of a high-priority data flow. A new zone priority metric function is proposed to integrate the zone priority into the path planning process. The movement cost is thought to reduce the amount of wasted energy during movement, which will make the mobile sink last longer. The movement delay is also considered for real-time urgent data transmission and decreases the chance of buffer overflow of sensor nodes owing to its restricted buffer capacity;
- Secondly, we propose an energy-efficient clustering technique considering the average intra-cluster distance, residual energy, and reliability of intra-cluster data transmission. In the cluster hierarchy, aggregating the data by each cluster head from its members causes imbalanced energy loss. A novel energy weight function is presented to pick the most energy-efficient node as a cluster head and avoid selecting low-residual-energy nodes. To achieve reliable intra-cluster data transmission, a new link quality metric function is suggested to express the quality of links between each candidate cluster head and its member nodes. We assess the average intra-cluster distance to improve end-to-end latency, as with many previous clustering approaches;
- Third, we offer a real-time, reliable, energy-efficient, and environment-aware routing approach. The suggested routing strategy minimizes the external environment’s impact on data transmission. Link quality is also considered to prevent data forwarding over unstable paths; a novel function that combines sensor node residual energy and traffic load balances energy usage is proposed. It provides real-time WSN transmission. Only qualified neighbors who can deliver urgent data on time participate in the routing procedure. Moreover, it calculates the relaying delay for each eligible candidate neighbor to reduce route latency. The suggested routing approach uses more realistic parameters than prior systems;
- Lastly, these problems involve 0/1 integer linear programming. Then, swarm intelligence is proposed for optimization problems.
3. Problem Modeling
- (1)
- Provides minimum movement cost;
- (2)
- Is away from the danger zones to keep mobile sink path safe as much as possible;
- (3)
- Provides the maximum coverage while the observations in the highest priority zones are collected;
- (4)
- Provides the lowest end-to-end latency for real-time data transmission and eliminates sensor node buffer overflow due to limited buffer capacity.
- (1)
- Provides the shortest average intra-cluster distance;
- (2)
- Provides the highest possible data transfer reliability;
- (3)
- Has the maximum residual energy compared with the other candidates.
- (1)
- Minimum communication distance;
- (2)
- Less likely to be cut off as a result of environmental reasons;
- (3)
- Maximum reliability;
- (4)
- Minimum end-to-end delay;
- (5)
- In order to establish a better energy balance, the nodes participating in this path have the highest value resulting from the new proposed energy load function.
4. Formulation for Optimal Solution
4.1. Optimal Path Planning Problem
4.2. Optimal Cluster Head Selection Problem
4.3. Optimal Routing Problem
5. Swarm Based Solution
5.1. Path Planning Problem
5.1.1. Pheromone Calculation
5.1.2. The Heuristic Information Calculation
5.2. Cluster Head Selection Problem
5.2.1. Pheromone Calculation
5.2.2. The Heuristic Information Calculation
5.3. Routing Problem
5.3.1. Pheromone Calculation
5.3.2. The Heuristic Information Calculation
6. Performance Evaluations
6.1. Performance Evaluation Criteria
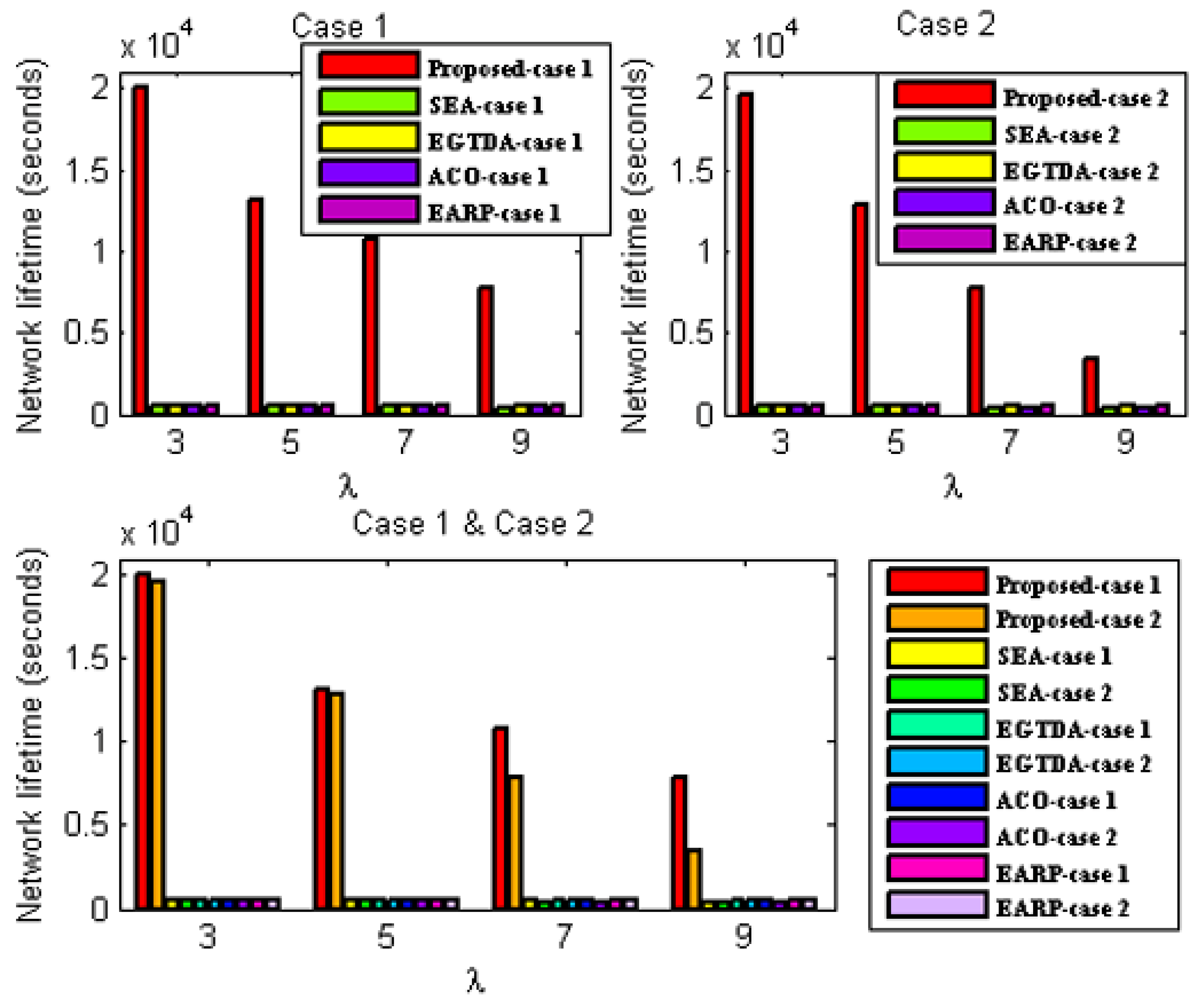
- Network Lifetime [15] is the time elapsed from the start of the network operation till the first node in the network fails due to battery depletion;
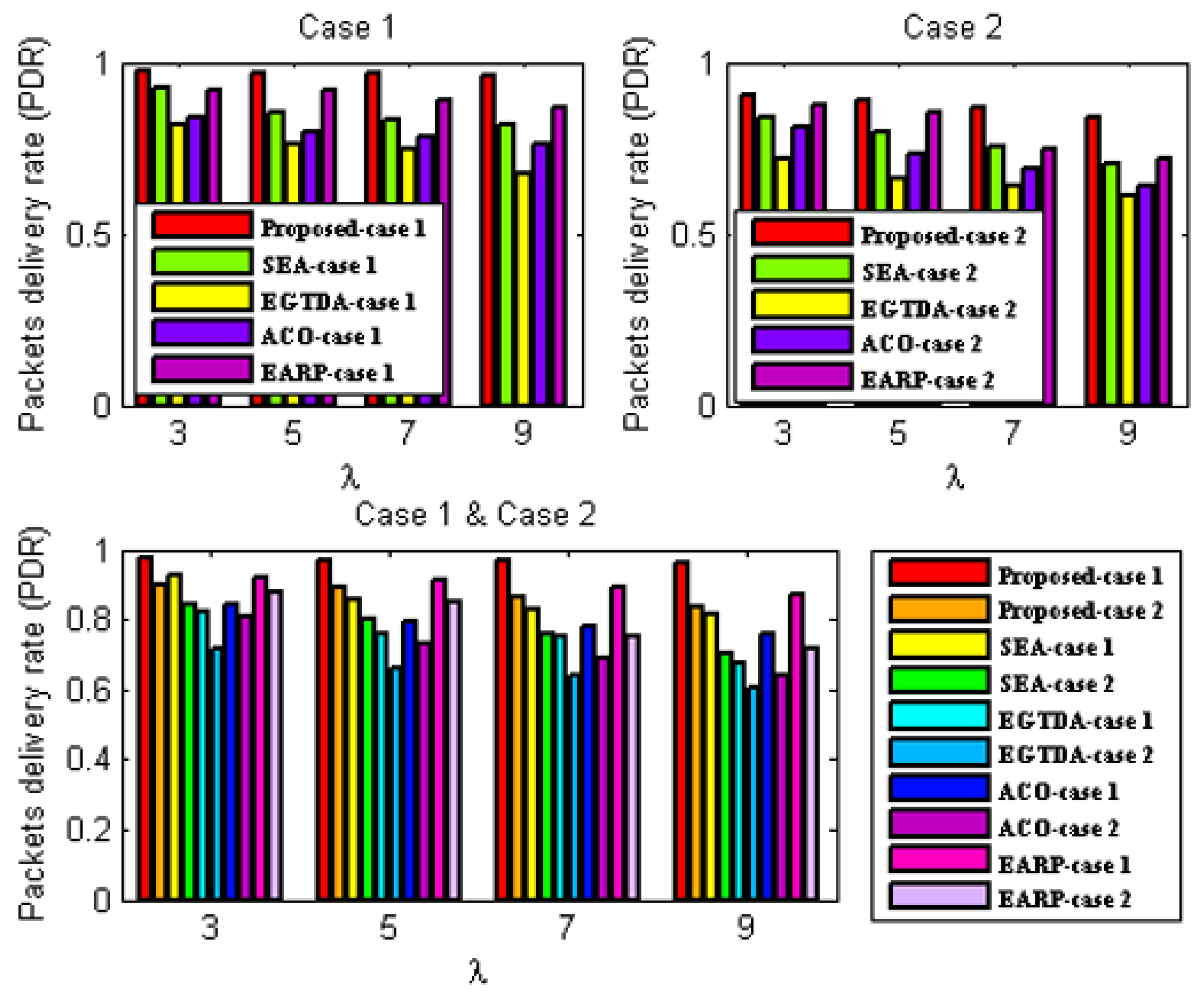
- Packet delivery ratio (PDR) [15] concerns the number of successful messages received by the sink node to that sent by the source nodes;
- Deadline miss ratio [15] is the percentage of packets that could not reach the sink node during their deadline;
- Average end-to-end delay [15] is the average time taken by the data packet to travel from source node to the sink.
6.2. Simulation Model
6.3. Simulation Results
- First scenario: It is considered that environmental statistics are within the normal range; therefore, environmental influences do not affect network performance. It demonstrates the performance of the approaches under normal environmental conditions;
- Second scenario: It is assumed that the environmental data are outside the normal range. It demonstrates the performance of the approaches under environmental conditions outside the normal range. In the second scenario, all following studies assume the network is impacted by wildfire. Environmental events are considered to occur 400 seconds after network start up.
- A.
- Case 1: It exhibits the performance of the techniques using the proposed routing algorithm for urgent data collection;
- B.
- Case 2: It demonstrates the performance of the approaches with the PSO-based routing approach in [28] for urgent data collection.
6.3.1. Network Lifetime Evaluation
- Network lifetime evaluation under the first scenario
- 2.
- Network lifetime evaluation under the second scenario
6.3.2. Packets Delivery Ratio (PDR) Evaluation
- PDR evaluation under the first scenario
- 2.
- PDR evaluation under the second scenario
6.3.3. Deadline Miss Ratio Evaluation
- Deadline miss ratio evaluation under the first scenario
- 2.
- Deadline miss ratio evaluation under the second scenario
6.3.4. Average End-to-End Delay Evaluation
- Average end-to-end delay evaluation under the first scenario
- 2.
- Average end-to-end delay evaluation under the second scenario
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ilyas, M.; Mahgoub, I. Handbook of Sensor Networks; CRC Press: London, UK, 2005; pp. 117–140. [Google Scholar]
- Krishnan; Jung, Y.M.; Yun, S. An Improved Clustering with Particle meta Optimization-Based Mobile Sink for Wireless Sensor Networks. In Proceedings of the 2nd International Conference on Trends in Electronics and Informatics, Tirunelveli, India, 11–12 May 2018. [Google Scholar]
- Rao, P.C.S.; Jana, P.K.; Banka, H. A particle swarm optimization based energy efficient cluster head selection algorithm for wireless sensor networks. Wirel. Netw. J. 2017, 23, 2005–2020. [Google Scholar] [CrossRef]
- Yadav, A.; Kumar, S.; Vijendra, S. Network Life Time Analysis of WSNs Using Particle Swarm Optimization. Procedia Comput. Sci. 2018, 132, 805–815. [Google Scholar] [CrossRef]
- Darabkh, K.A.; El-Yabroudi, M.Z.; El-Mousa, A.H. BPA-CRP: A balanced power-aware clustering and routing protocol for wireless sensor networks. Ad Hoc Netw. 2019, 82, 155–171. [Google Scholar] [CrossRef]
- Singh, B.; Lobiyal, D.K. A novel energy-aware cluster head selection based on particle swarm optimization for wireless sensor networks. Hum. Cent. Comput. Inf. Sci. J. 2012, 2, 13. [Google Scholar] [CrossRef]
- Hong, Z.; Wang, R.; Li, X. A clustering-tree topology control based on the energy forecast for heterogeneous wireless sensor networks. IEEE/CAA J. Autom. Sin. 2016, 3, 68–77. [Google Scholar]
- Devi, V.S.; Ravi, T.; Priya, S.B. Cluster Based Data Aggregation Scheme for Latency and Packet Loss Reduction in WSN. Comput. Commun. J. 2020, 149, 36–43. [Google Scholar] [CrossRef]
- McCune, R.R.; Madey, G.R. Control of Artifial Swarms with DDDAS. In Proceedings of the 14th International Conference on Computational Science (ICCS), Banff, AB, Canada, 22–25 June 2014; Volume 29, pp. 1171–1181. [Google Scholar]
- Chang, J.-Y.; Jeng, J.-T.; Sheu, Y.-H.; Jian, Z.-J.; Chang, W.-Y. An efficient data collection path planning scheme for wireless sensor networks with mobile sinks. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 257. [Google Scholar] [CrossRef]
- Tan, L.Y.; Goh, H.G.; Liew, S.Y.; Teoh, S.K. An Energy-Efficient Mobile-Sink Path-Finding Strategy for UAV WSNs. Comput. Mater. Contin. J. 2021, 67, 3419–3432. [Google Scholar]
- Kalayci, T.E.; Uğur, A. Genetic Algorithm–Based Sensor Deployment with Area Priority. Cybern. Syst. J. 2011, 42, 605–620. [Google Scholar] [CrossRef]
- Fu, X.; Fortino, G.; Pace, P.; Aloi, G.; Li, W. Environment-fusion multipath routing protocol for wireless sensor networks. Inf. Fusion 2020, 53, 4–19. [Google Scholar] [CrossRef]
- El-Fouly, F.H.; Ramadan, R.A. E3AF: Energy Efficient Environment-Aware Fusion Based Reliable Routing in Wireless Sensor Networks. IEEE Access 2020, 8, 112145–112159. [Google Scholar] [CrossRef]
- El-Fouly, F.H.; Ramadan, R.A. Real-Time Energy-Efficient Reliable Traffic Aware Routing for Industrial Wireless Sensor Networks. IEEE Access 2020, 8, 58130–58145. [Google Scholar] [CrossRef]
- Yang, X.-S.; Karamanoglu, M. Swarm intelligence and bio-inspired computation: An overview. In Swarm Intelligence and Bio-Inspired Computation; Elsevier: Amsterdam, The Netherlands, 2013; pp. 3–23. [Google Scholar]
- Dorigo, M.; Stutzle, T. Ant Colony Optimization; MIT Press: Cambridge, MA, USA, 2004. [Google Scholar]
- Al-Kaseem, B.R.; Taha, Z.K.; Abdulmajeed, S.W. Optimized Energy Efficient Path Planning Strategy in WSN with Multiple Mobile Sinks. IEEE Access 2021, 9, 82833–82847. [Google Scholar] [CrossRef]
- Bencan, G.; Panpan, D.; Peng, C.; Dong, R. Evolutionary game-based trajectory design algorithm for mobile sink in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2020, 16, 1550147720911000. [Google Scholar] [CrossRef]
- Praba, T.S.; Sethukarasi, T.; Venkatesh, V. Krill herd based TSP approach for mobile sink path optimization in large scale wireless sensor networks. Int. J. Intell. Fuzzy Syst. 2020, 38, 6571–6581. [Google Scholar]
- Koosheshi, K.; Ebadi, S. Optimization energy consumption with multiple mobile sinks using fuzzy logic in wireless sensor networks. Int. J. Wirel. Netw. 2019, 25, 1215–1234. [Google Scholar] [CrossRef]
- Krishnan, M.; Yun, S.; Jung, Y.M. Enhanced clustering and ACO-based multiple mobile sinks for efficiency improvement of wireless sensor networks. Int. J. Comput. Netw. 2016, 160, 33–40. [Google Scholar] [CrossRef]
- Vijayashree, R.; Dhas, C.S.G. Energy efficient data collection with multiple mobile sink using artificial bee colony algorithm in large-scale WSN. Automatika 2019, 60, 555–563. [Google Scholar] [CrossRef]
- Moussa, N.; Benhaddou, D.; el Alaoui, A.E. EARP: An Enhanced ACO-Based Routing Protocol for Wireless Sensor Networks with Multiple Mobile Sinks. Int. J. Wirel. Inf. Netw. 2022, 29, 118–129. [Google Scholar] [CrossRef]
- Mostafaei, H. Energy-efficient algorithm for reliable routing of wireless sensor networks. IEEE Trans. Ind. Electron. 2019, 66, 5567–5575. [Google Scholar] [CrossRef]
- Liu, Z.X.; Dai, L.L.; Ma, K.; Guan, X.P. Balance energy-efficient and real-time with reliable communication protocol for wireless sensor network. J. China Univ. Posts Telecommun. 2013, 20, 37–46. [Google Scholar] [CrossRef]
- Moussa, N.; Hamidi-Alaoui, Z.; El Belrhiti El Alaoui, A. ECRP: An energy-aware cluster-based routing protocol for wireless sensor networks. Wirel. Netw. J. 2020, 26, 2915–2928. [Google Scholar] [CrossRef]
- Vimalarani, C.; Subramanian, R.; Sivanandam, S. An enhanced PSO-based clustering energy optimization algorithm for wireless sensor network. Sci. World J. 2016, 2016, 8658760. [Google Scholar] [CrossRef]
- Wang, J.; Yang, X.; Ma, T.; Wu, M.; Kim, J.-U. An Energy Efficient Competitive Clustering Algorithm for Wireless Sensor Networks using Mobile Sink. Int. J. Grid Distrib. Comput. 2012, 5, 79–92. [Google Scholar]
- Cheng, L.; Niu, J.; Cao, J.; Das, S.K.; Gu, Y. QoS aware geographic opportunistic routing in wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 1864–1875. [Google Scholar] [CrossRef]
- Liu, K.; Abu-Ghazaleh, N.; Kang, K.D. Exploiting slack time for just-in-time scheduling in wireless sensor networks. Real-Time Syst. J. 2010, 45, 1–25. [Google Scholar] [CrossRef]
- Liu, A.; Ren, J.; Li, X.; Chen, Z.; Shen, X.S. Design principles and improvement of cost function based energy aware routing algorithms for wireless sensor networks. Elsevier Comput. Netw. 2012, 5, 1951–1967. [Google Scholar] [CrossRef]
- Deif, D.; Gadalla, Y. An Ant Colony Optimization Approach for the Deployment of Reliable Wireless Sensor Networks. IEEE Access 2017, 5, 10744–10756. [Google Scholar] [CrossRef]
- Li, Y.; Chen, C.S.; Song, Y.Q.; Wang, Z.; Sun, Y. Enhancing real-time delivery in wireless sensor networks with two-hop information. IEEE Trans. Ind. Inform. 2009, 5, 113–122. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper ID | Path Planning | Cluster Head Selection | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Parameters | Parameters | |||||||||
| Moving Cost | Travelling Delay | Traveling Distance | Cluster Head Energy | Areas (Zones) Priority | Environmental Impact | Real Time Delivery | Residual Energy | Distance | Reliability | |
| [18] | √ | √ | √ | × | × | × | × | √ | × | × |
| [19] | × | × | √ | √ | × | × | × | √ | × | × |
| [20] | × | √ | × | × | × | × | × | √ | √ | × |
| [21] | × | × | × | √ | × | × | × | √ | √ | × |
| [22] | × | × | √ | × | × | × | × | √ | × | × |
| [23] | × | × | √ | × | × | × | × | √ | √ | × |
| [24] | × | × | √ | × | × | × | × | √ | √ | × |
| Proposed Solution | √ | √ | √ | × | √ | √ | √ | √ | √ | √ |
| Paper ID | Cluster-Based Routing | |||||
|---|---|---|---|---|---|---|
| Parameters | ||||||
| Distance | Residual Energy | Traffic Load | Reliability | Environmental Impact | Real Time Delivery | |
| [27] | √ | √ | × | × | × | × |
| [28] | √ | √ | × | × | × | × |
| Proposed Solution | √ | √ | √ | √ | √ | √ |
| Given Parameters | |
|---|---|
| Notation | Description |
| V | Set of the monitored field sensor nodes. |
| MS | The mobile sink. |
| T | The time horizon. |
| Z | The set of all zones in the monitored field. |
| The mobile sink movement speed, MS. | |
| The cluster heads set in the monitored field at time t, . | |
| The final set of cluster heads that have an environmental impact metric larger than threshold value in the monitored field at time t, . | |
| The cluster heads set that have urgent messages at time t, . | |
| The set of all urgent messages collected from the members of the cluster head s at time t, | |
| p | The mobile sink moving path, S at time t, which consists of a set of all vertices from vi to vn, |
| The movement cost from point u to x, | |
| The movement delay from point u to x, | |
| The zone i’s environmental data with environmental factor f. | |
| Zone i environmental impact metric for single environmental factor f. | |
| Environmental impact metric of zone i for multiple environmental factors. | |
| The neighboring environmental impact metric of zone i. | |
| The final environmental impact metric of zone i. | |
| The final environmental impact metric of the cluster head x in a zone i at time t, . | |
| The environmental impact threshold. | |
| The attenuation coefficient between zone i and j. | |
| the distance between zones i and j centers where i ≠ j. | |
| The distance between both the cluster head x and sink node MS at time t, . | |
| The hop count from the cluster head x to sink node MS at time t, . | |
| The energy needed to transfer mobile sink s from cluster head u to x at time t, . | |
| The zone priority of zone i at time t, . | |
| The zone priority metric of the cluster head x in zone i at time t, . | |
| IDL | The initial deadline is defined at each source node by the application. |
| deadline | The packet deadline is updated at each hop. |
| The required delivery delay for the message-based cluster head x, . | |
| Cluster head average distance x, . | |
| Is the intra-cluster distance of node x, | |
| The packet reception ratio for the link (x,y), | |
| The packet loss ratio for the link (x,y), | |
| The delay for the link (x,y). | |
| Residual energy of node x at time t, | |
| Sensor node x initial energy, | |
| Energy required for Single hop transmission from x to y, | |
| Energy consumption load function for each cluster head y at time t, | |
| The load of each cluster head x at time t, | |
| The total number of messages at cluster head y, | |
| The set of all candidate paths between any pair (y, MS), | |
| The neighbor set of node x that is not covered by any cluster head, | |
| The neighbor set of node x, | |
| The cluster head neighbor set of cluster head x, | |
| The final cluster head neighbor set of cluster head x, | |
| Indicator Parameter | |
| 1 if cluster head y is on path p to the mobile sink and 0 otherwise, | |
| Decision Variables | |
| 1 if the sink node MS moves from point i to i+1 and 0 otherwise, . | |
| 1 if the mobile sink moves from cluster head u to cluster head x at time intervals t and 0 otherwise, | |
| 1 if the cluster head x uses the link (x, y) to transmit urgent message u through it to sink node and 0 otherwise, | |
| 1 if the cluster head x uses cluster head y to relay urgent message u of the source node s and 0 otherwise, | |
| 1 if the cluster head x has a final environmental metric greater than the threshold value and 0 otherwise, | |
| 1 if the difference between cluster head x’s environmental metric and cluster head n’s is less than zero and 0 otherwise. | |
| 1 if the difference between the zone priority metric of cluster head x’s in zone i, and cluster head v’s in zone j is less than 0, 0 otherwise. | |
| 1 if the difference between the average distance metric value of cluster head x in zone i and cluster head k in zone j is less than zero and 0 otherwise, | |
| 1 if the cluster head x has the highest environmental metric value compared to that of other cluster heads and 0 otherwise, | |
| 1 if the cluster head x has the highest zone priority metric value compared to that of other cluster heads and 0 otherwise, | |
| 1 if the cluster head x has the minimum average distance metric value compared to that of other cluster heads and 0 otherwise, | |
| 1 if the node x is elected as a cluster head and 0 otherwise, | |
| 1 if the node x is selected as a cluster head at time interval t and 0 otherwise, | |
| 1 if the difference between the quality metric values of node x and node f is less than zero and 0 otherwise, | |
| 1 if the difference between the energy metric values node x and node b is less than zero and 0 otherwise, | |
| 1 if the node x has the minimum quality metric value compared to that of other nodes and 0 otherwise, | |
| 1 if the node x has the highest energy metric value compared to that of other nodes and 0 otherwise, | |
| 1 if the cluster head y has relaying delay less than or equal to the desired delay and 0 otherwise, | |
| 1 if cluster head y can reach sink node and 0 otherwise, | |
| 1 if the cluster head y has the minimum value of the relaying delay compared with other cluster heads and 0 otherwise, | |
| 1 if the difference between the relaying delay value of cluster heads l and y is less than zero and 0 otherwise, | |
| 1 if the cluster head y has the highest value obtained from energy load function value compared to that of other cluster heads and 0 otherwise, | |
| 1 if the difference between the obtained values from energy load function of cluster head y and ν is less than zero and 0 otherwise, | |
| 1 if the difference between the environmental metric value of cluster head y and n is less than zero and 0 otherwise, | |
| 1 if the cluster head y has the maximum environmental metric value compared to that of other cluster heads and 0 otherwise, | |
| Parameters | Values |
|---|---|
| Node deployment strategy | Uniformly random |
| Number of sensor nodes | 200 |
| Maximum retransmissions number | 4 |
| Packet size | 50 bytes |
| Buffer size | 128 bytes |
| Frequency Path loss exponent | 868 MHz 3 |
| Transmission power Initial energy of nodes Noise floor | 0 dBm 125 mJ −115 dBm |
| Maximum radio range | 150 m |
| Data rate | 20 Kbps |
| Shadow fading variance | 3 |
| Reference distance | 1 m |
| Event area (Wildfire) | Circles with a radius from 5 m and 50 m |
| Normal range for temperature | [0, 50] °C |
| Normal range for relative humidity | [30%, 80%] |
| Extreme range (temperature) | [−10, 100] °C |
| Extreme range (relative humidity) | [0%, 100%] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El-Fouly, F.H.; Altamimi, A.B.; Ramadan, R.A. Energy and Environment-Aware Path Planning in Wireless Sensor Networks with Mobile Sink. Sensors 2022, 22, 9789. https://doi.org/10.3390/s22249789
El-Fouly FH, Altamimi AB, Ramadan RA. Energy and Environment-Aware Path Planning in Wireless Sensor Networks with Mobile Sink. Sensors. 2022; 22(24):9789. https://doi.org/10.3390/s22249789
Chicago/Turabian StyleEl-Fouly, Fatma H., Ahmed B. Altamimi, and Rabie A. Ramadan. 2022. "Energy and Environment-Aware Path Planning in Wireless Sensor Networks with Mobile Sink" Sensors 22, no. 24: 9789. https://doi.org/10.3390/s22249789
APA StyleEl-Fouly, F. H., Altamimi, A. B., & Ramadan, R. A. (2022). Energy and Environment-Aware Path Planning in Wireless Sensor Networks with Mobile Sink. Sensors, 22(24), 9789. https://doi.org/10.3390/s22249789