
UAV-Based Volumetric Measurements toward Radio Environment Map Construction and Analysis

 ,
,  ,
,  and
and 
Abstract
1. Introduction
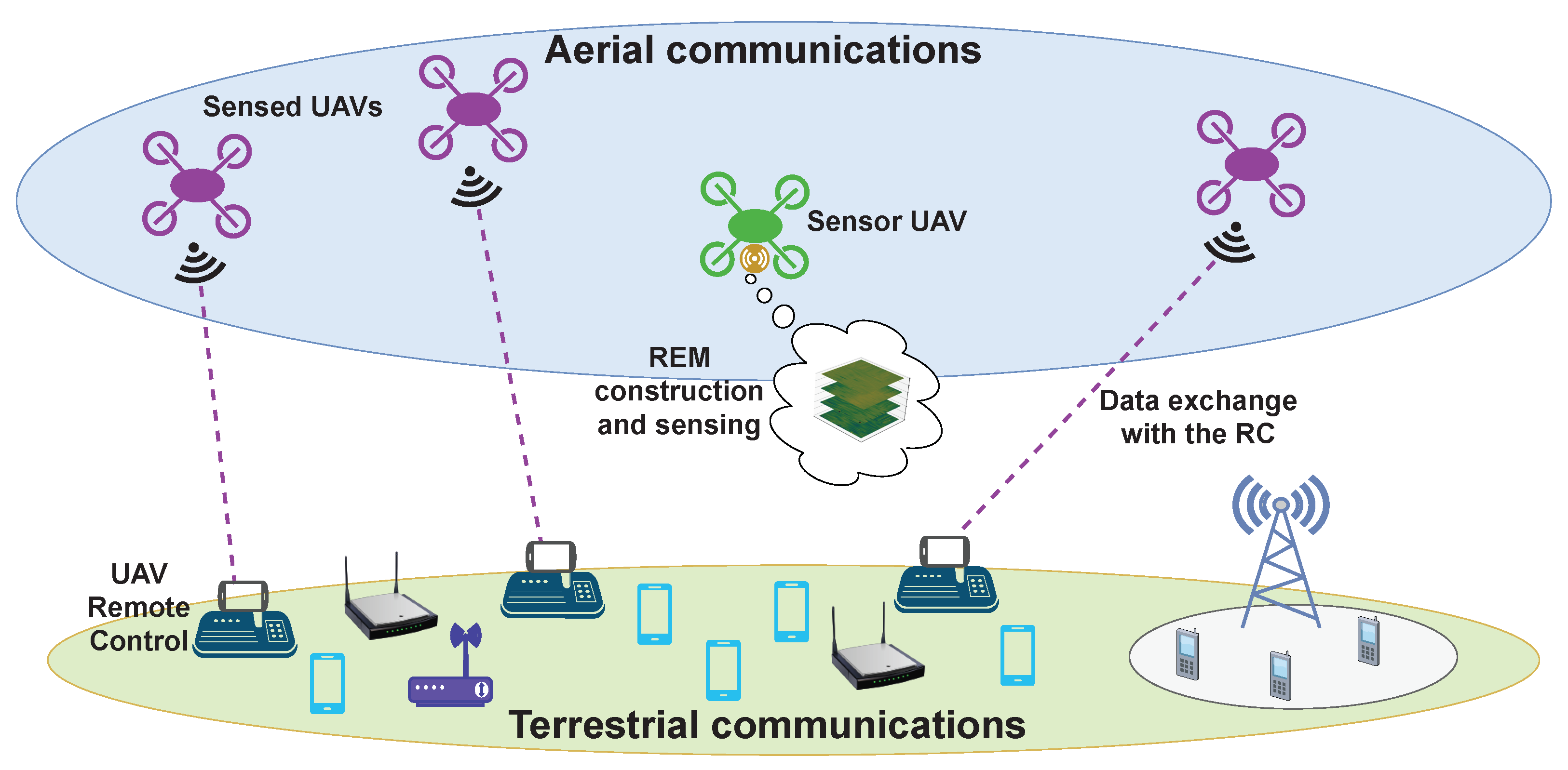
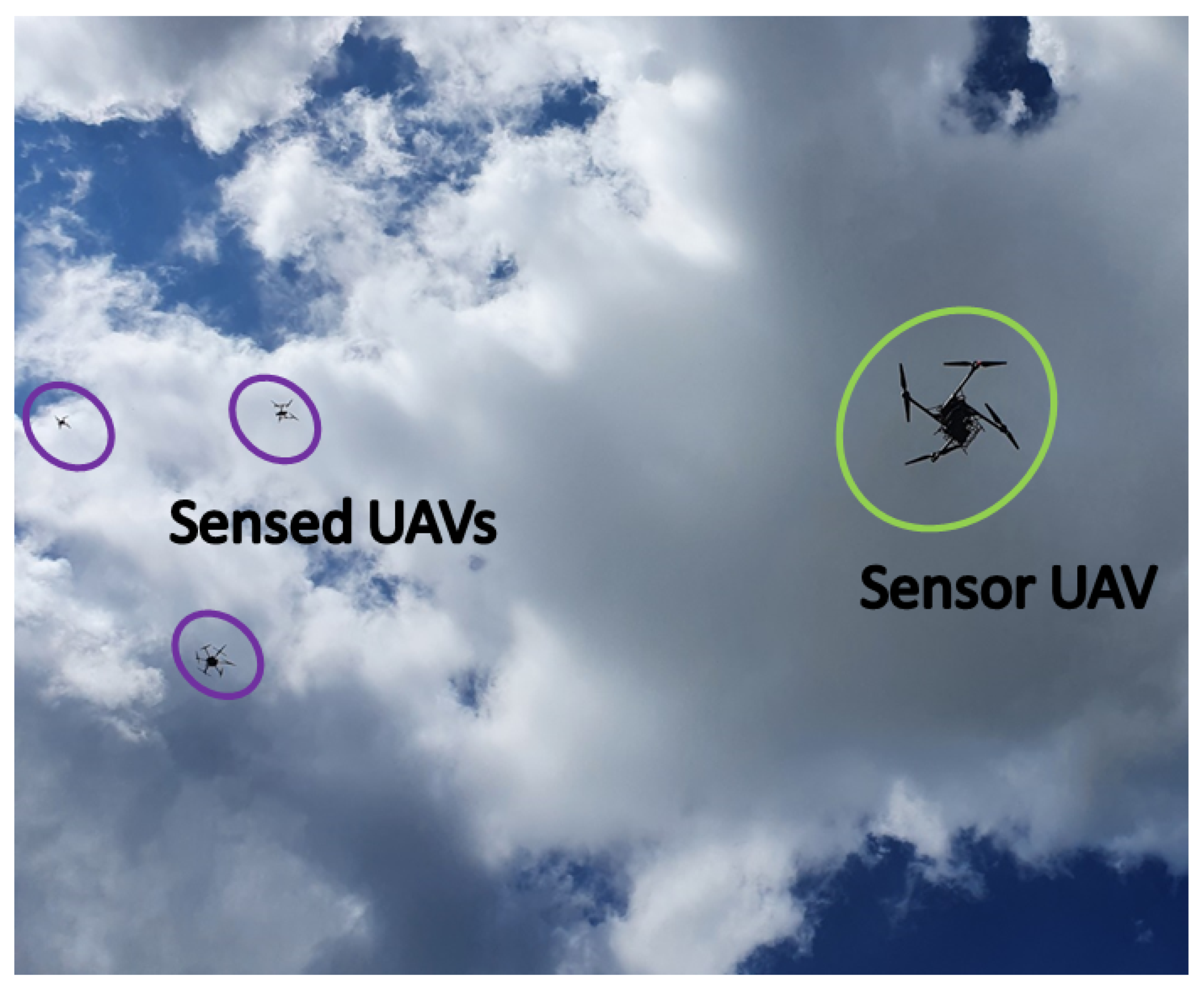
- To the authors’ knowledge, this is the first work that explores the spectrum utilization via analysis of REM for channels occupied by active communicating UAVs, through measurements collected by a UAV-mounted SDR sensor. A description of the experiment performed in a real-world outdoor environment (a flight model club) is given, as well as graphical and numerical representations of the analyzed metrics (received signal mean power level, average difference of the mean power level, percentage of meaningful correlations).
- Exploration of the significance in temporal (2D space), spatial (3D space), and frequency domains of the received signal level variations. This analysis provides insight for the influence of the UAVs’ altitude and multipath reflectors on the REM, and identifies the RoIs in the particular environment. In this way, it serves as a basis for further research of reducing the amount of measurements and spectrum occupancy prediction for UAV-based communication coexistence in the ISM bands.
2. State of the Art
- UAV-based measurements are often used to map a cellular network’s coverage. Thus, both 3D assessment of the signal quality and network coverage planning are provided for more precise decision-making in UAV–ground and UAV–UAV communications, considering the spectrum utilization fluctuations in time and space [6]. In this work, an REM in 3D space is constructed, and the significance of the received signal level dynamics in the temporal, spatial (in 2D and 3D space, respectively), and frequency domains is determined.
- Limited work has been carried out for REM construction from measurements performed via a UAV-based sensor due to the equipment costs and the difficulty of the experimental setup’s execution. The practical considerations (such as computational complexity and SDR capabilities) for constructing REMs from wideband signals are rarely made in the relevant literature, as its focus is usually on REM estimation and interpolation methods that are often agnostic toward the carrier frequency and bandwidth. They are, nevertheless, important parameters in practical studies and prototyping for UAV-based communications. This paper presents real-time experiments conducted by a UAV-mounted sensor that collects spectrum occupancy data for multiple active UAVs in an outdoor environment, and details the practical implementation of the measurement procedure. The goal of this work is to describe the spectrum utilization (through the variations of the received signal) of an ISM band in the condition of densely deployed aerial communication nodes.
- Due to the impracticality (UAV short flight time and physical unfeasibility of covering a very large volume of space in an urban environment [3,22,23]) of constructing a 3D REM using a complete set of measurements, it is usually obtained from a limited number of samples that represent only certain areas of the volume, or the RoI. Estimating the trajectory that covers the RoI is, therefore, an important field of research. This work analyzes the correlation in the temporal and frequency domains as well as the differences in signal level fluctuations, thus providing a base for further research in reducing the amount of measurements and spectrum occupancy prediction for UAV-based communication coexistence in the ISM bands.
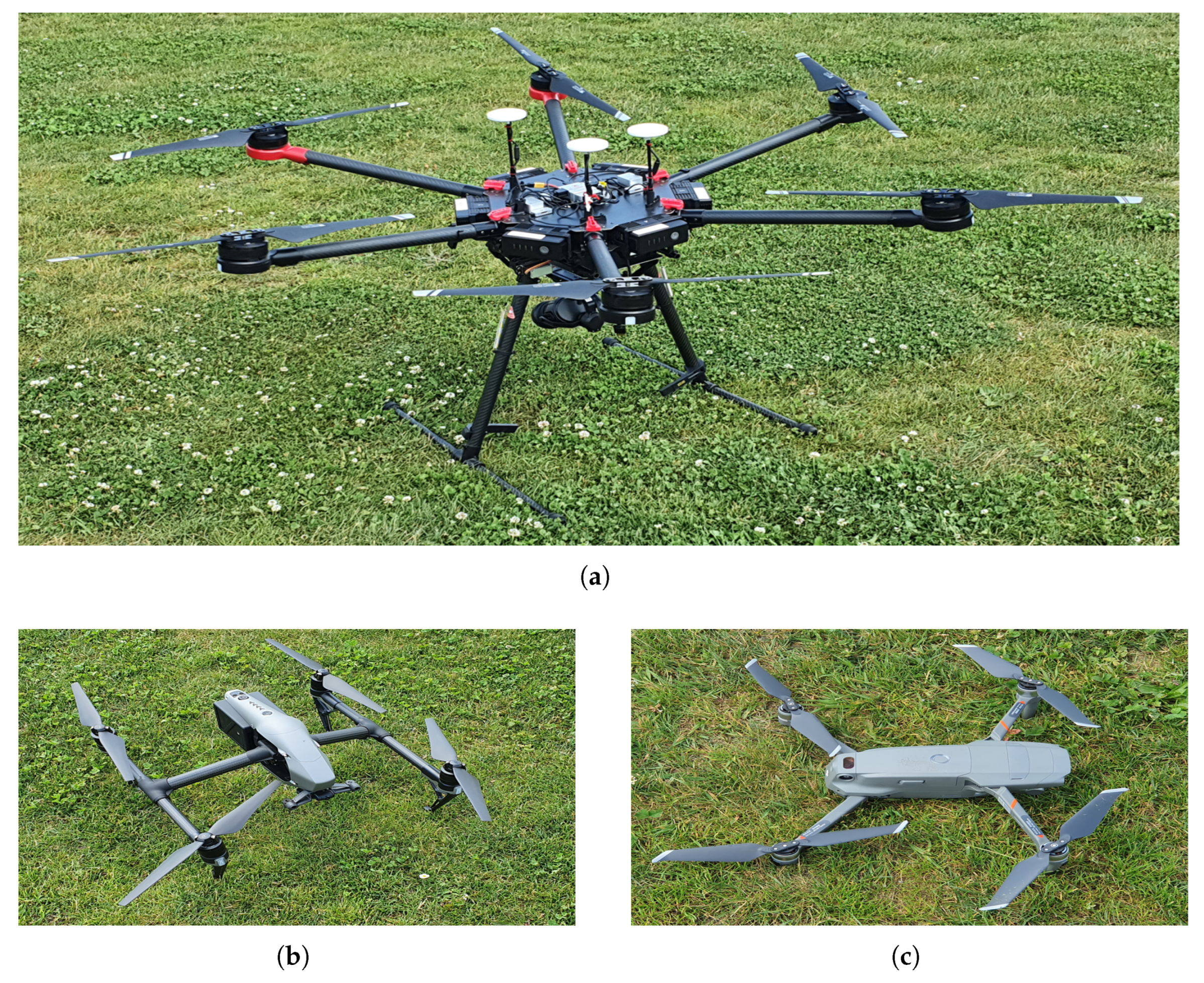
3. UAVs and Measurement Equipment
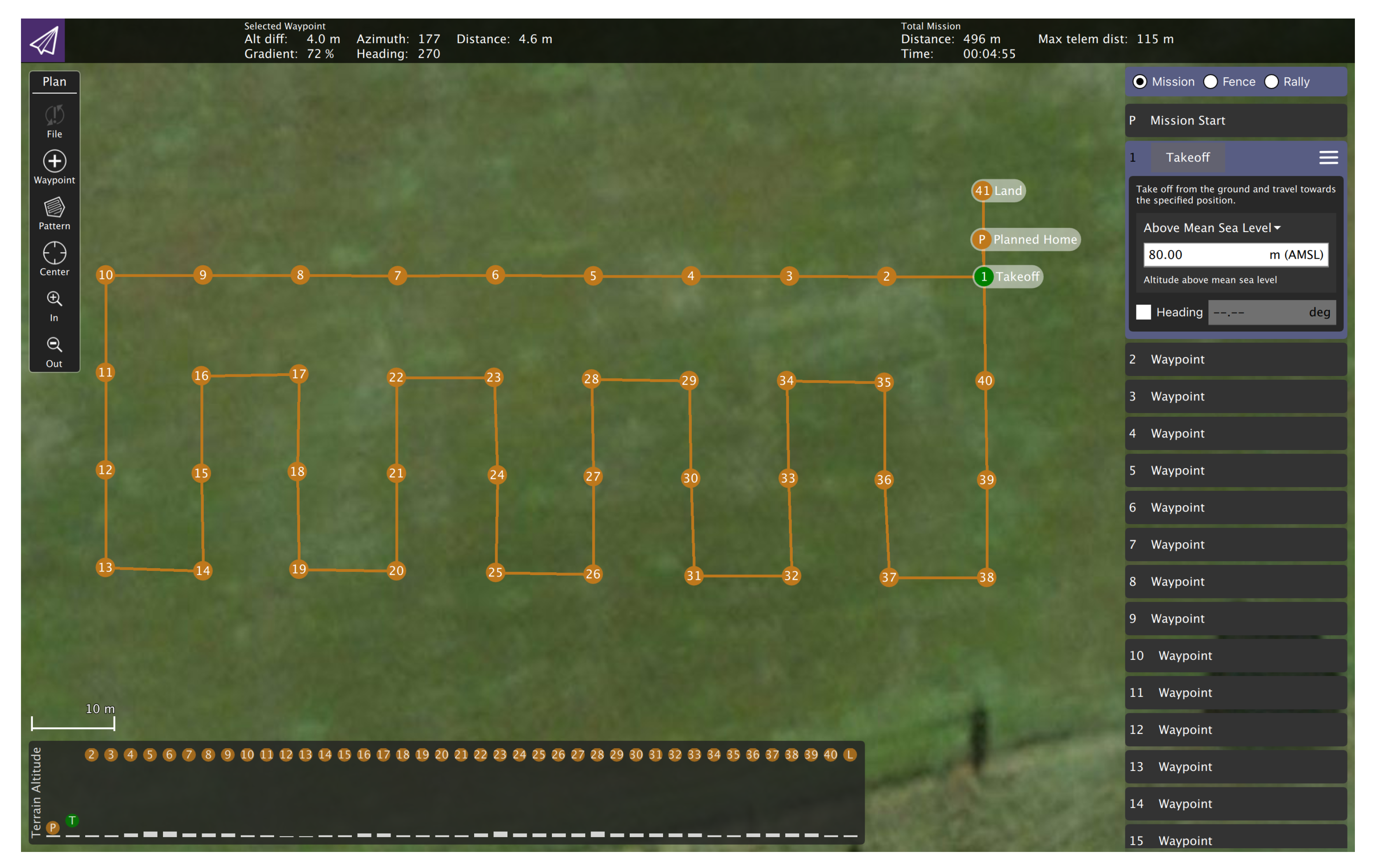
4. Experimental Setup and Measurement Methodology
5. Data Analysis and REMs
5.1. Analysis in the Time Domain
- As the altitude increases, the propagation conditions can be approximated by the free space path loss; thus, they are favorable in the 2.4 GHz frequency range. The path loss exponent also declines exponentially.
- Tall objects that create multipath components in the received signal, as well as ground reflections, tend to become negligible at a certain altitude (in this case, for m).
- The differences in velocity and direction between the sensed UAVs and the sensor UAV, especially at lower altitudes ( m), contribute to a significant signal variation. In addition, the same effect is caused by the UAVs’ airframe shadowing, particularly in the sensor UAV due to its aerial structure obstructing the line of sight between the transmitting UAVs and the SDR.
5.2. Analysis in the Spatial Domain
5.3. Analysis in the Frequency Domain
6. Discussion and Directions for Future Work
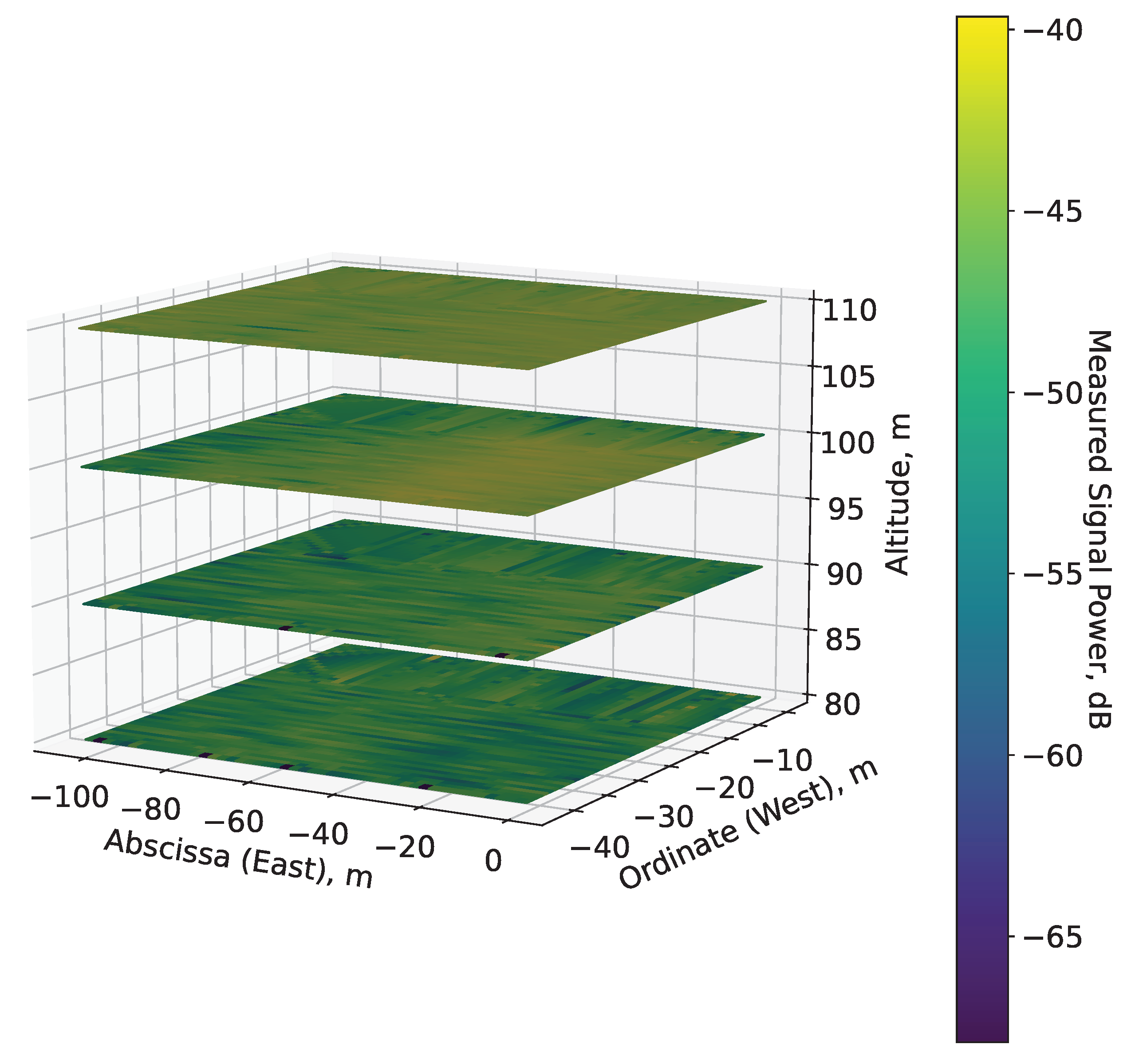
- At low altitudes ( m), the velocity difference between the sensor UAV and sensed UAVs, and the reflection from the ground and nearby tall objects have a significant effect on reception. The received signal’s fluctuations are non-negligible, and vary in the span of at least several dB, as illustrated by the REM (Figure 10). For this reason, it is unlikely that a reliable RoI (that does not include the whole measurement area) may be defined at such elevation levels. Nevertheless, this observation is the reason to suggest high computationally efficient low-altitude spectrum sensing. Either probabilistic [49] or machine-learning-based [50] algorithms for real-time spectrum sensing can be utilized to process the RF samples in less than 10 ms for accurate occupancy characterization. Its application in low-altitude UAVs [51] is, thus, an interesting research direction.
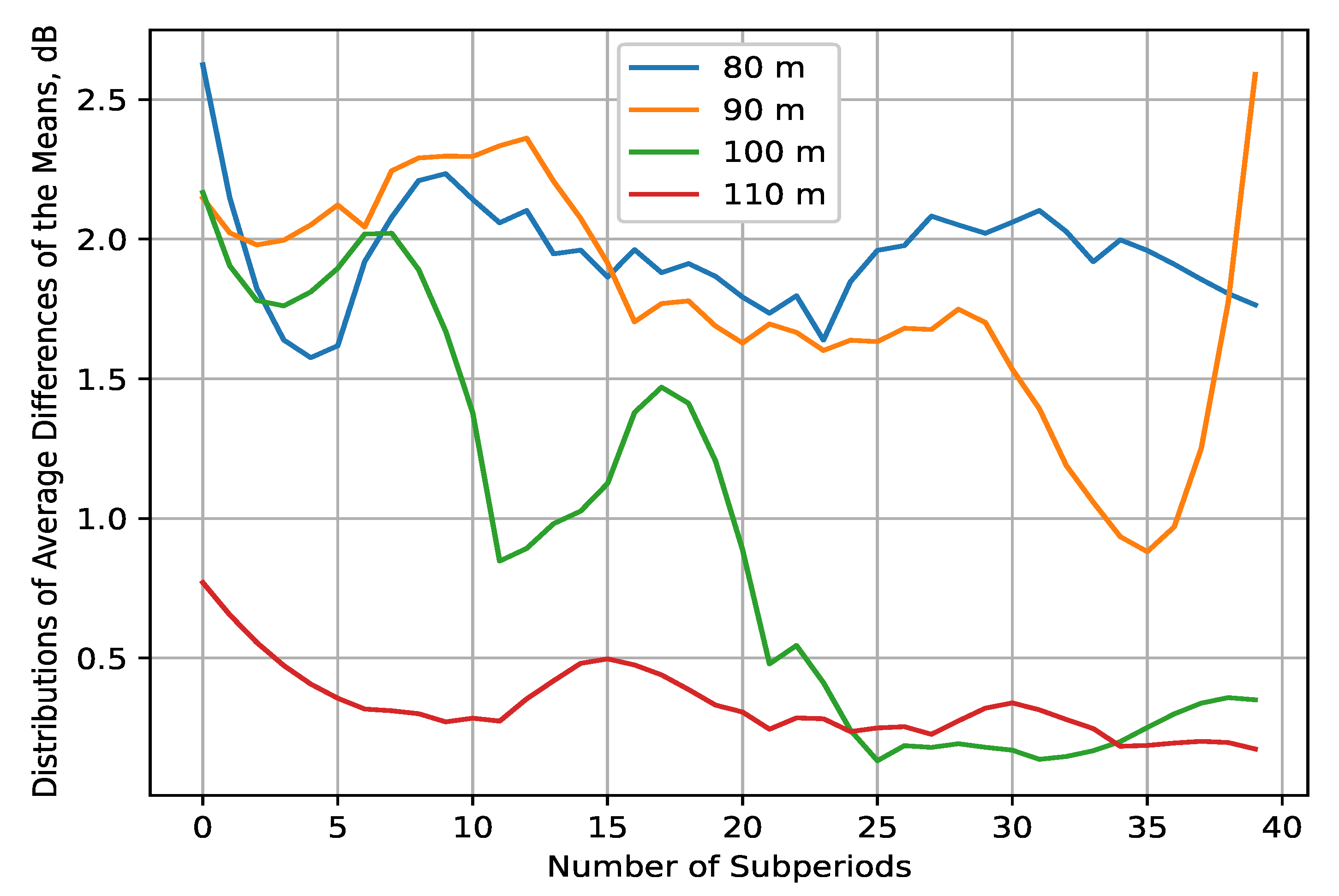
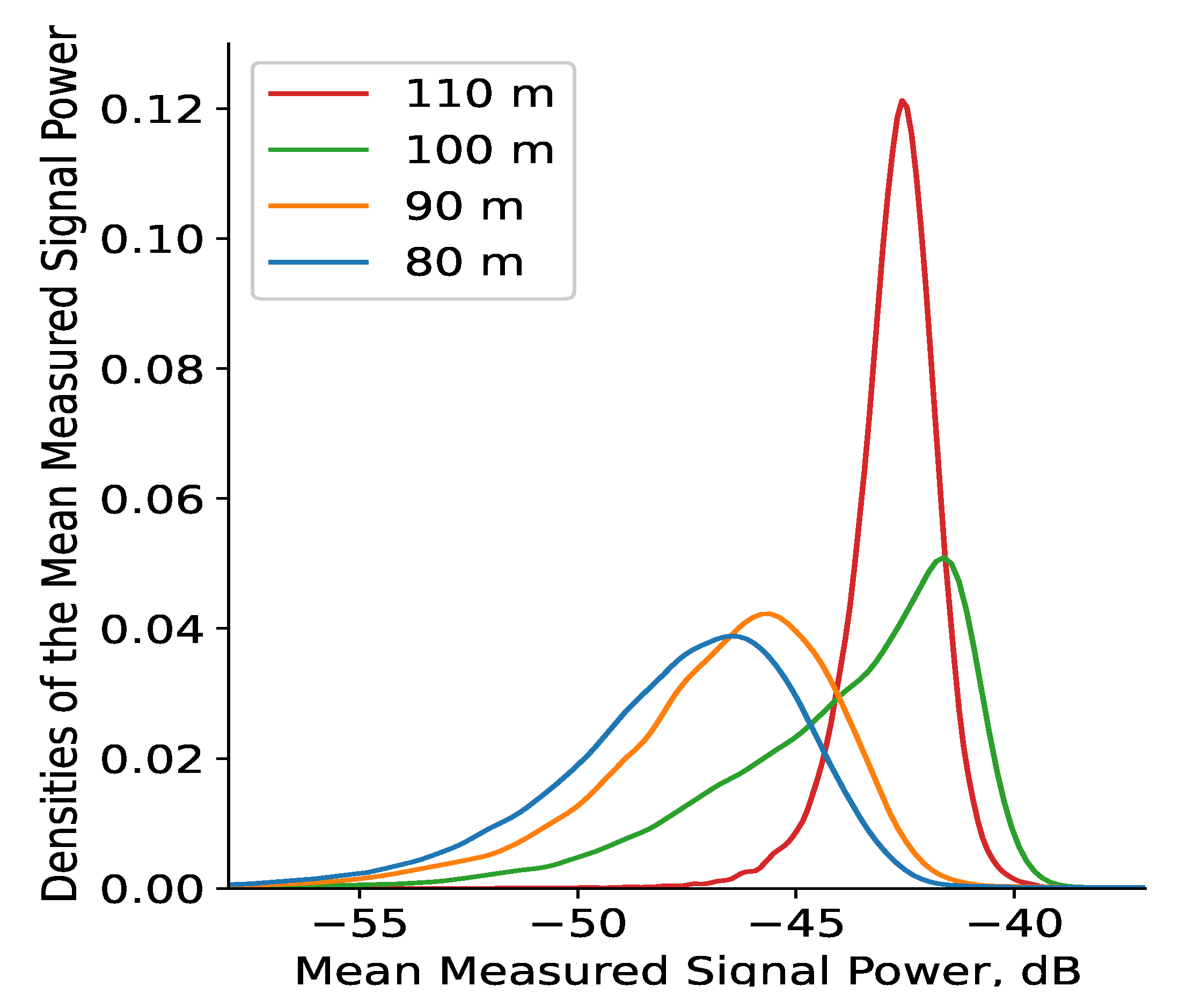
- The fluctuations’ intensity, as shown in Figure 9, Figure 12 and Figure 13, decreases dramatically with altitude (in this case, for m) due to the much weaker influence of ground reflection, whereas for higher altitudes, notable signal variations are present in only negligible portions of the plane (as the average difference of the means is around 0.5 dB for m). Then, the RoIs can be identified much more reliably as the areas in the REM at each elevation level in which the difference between the signal means is meaningfully high (>1 dB). For the rest of the REM, compressed sensing and limited measurements can be used for accurate spectrum reconstruction. Then, the REM database can be utilized instead of real-time spectrum sensing to characterize the resource availability.
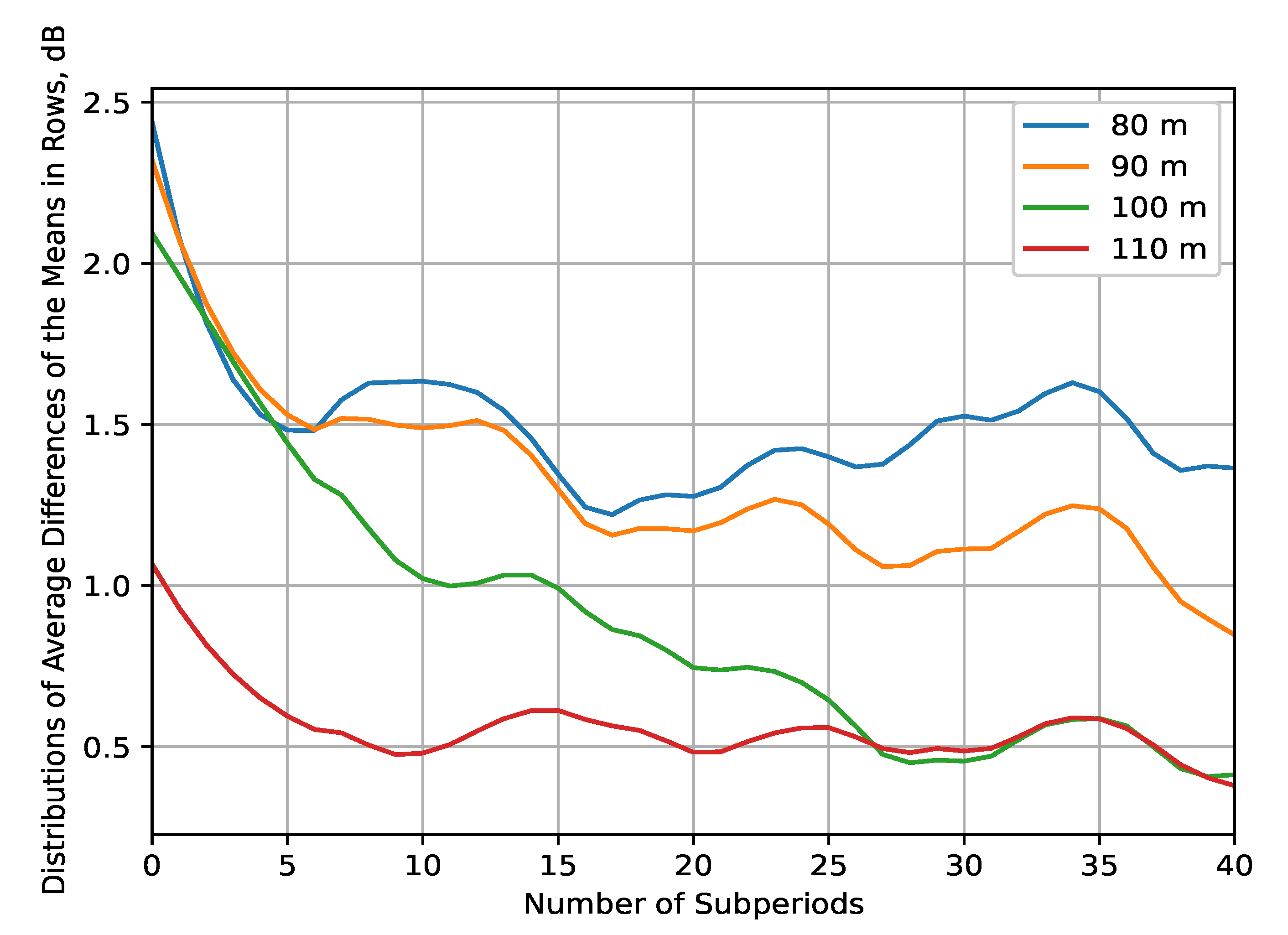
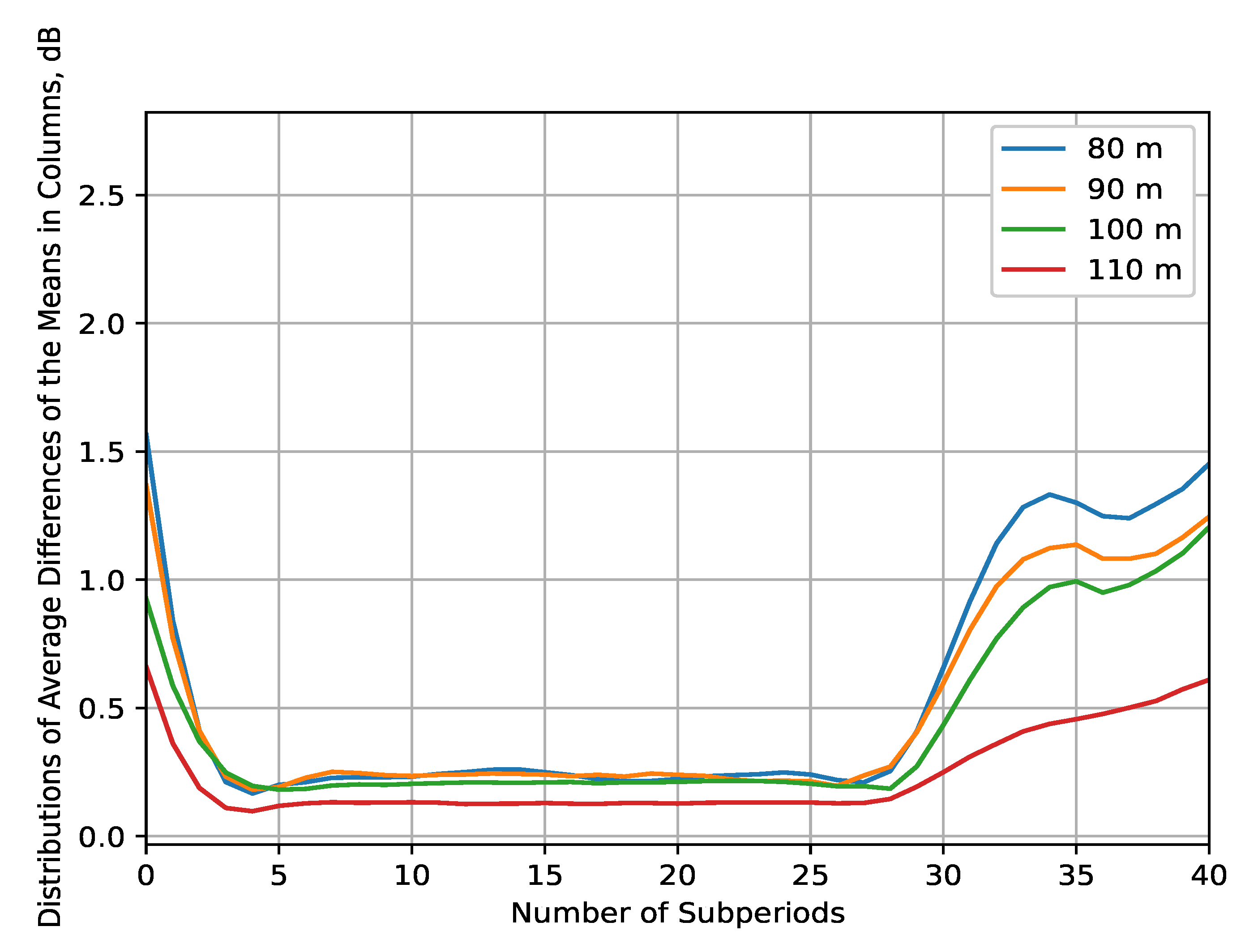
- Signal variance has different distributions depending on whether the sensor UAV moves in the x- or y-axis (Figure 12 and Figure 13). For m, the fluctuations in rows (Figure 12) are observable just as in the time domain distributions (Figure 8); however, they allow for a more precise determination of the RoIs that corroborates with the visual illustrations present in the REM (Figure 10). Much less information is provided by the distribution of average means in the ordinate axis (Figure 13). The RoIs, as defined by their coordinates in Section 5.2, constitute nearly the whole surface for m, but there is evidence that it may be decreased, as the most intensive variations comprise about 38% of it. The same can be said for the results at m, even though the whole RoI is about 75%. Due to the very favorable propagation conditions, the RoI at m is only marginal. These observations show that the sensor UAV’s direction of flight affects the signal variance, so that movement in a certain axis (the abscissa in this case) yields more meaningful measurement results, thus providing insight into the important field of path-planning for UAV communications [52].
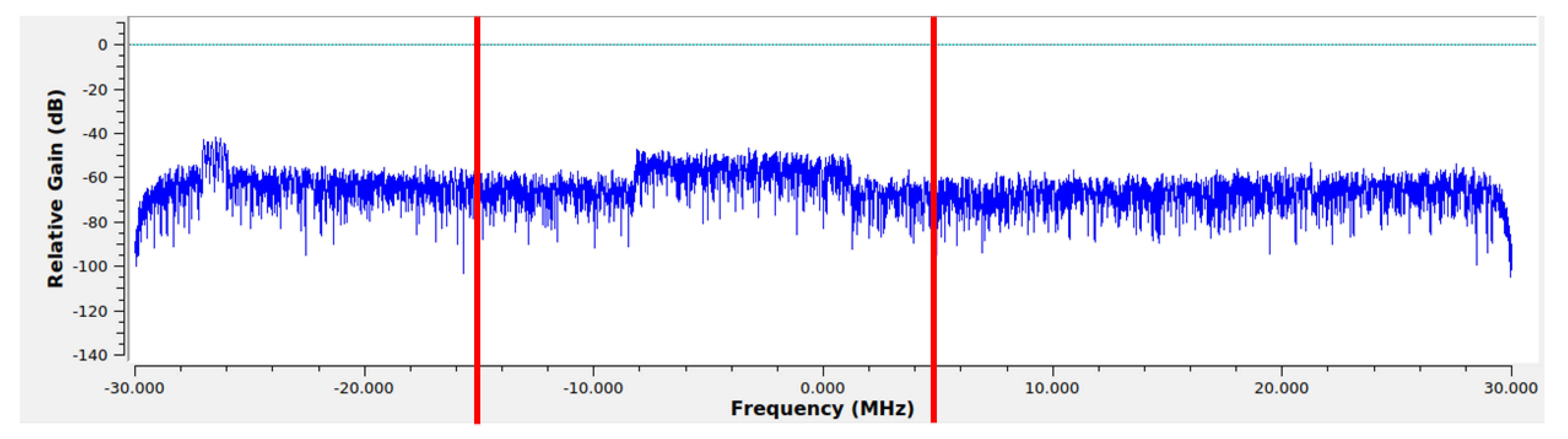
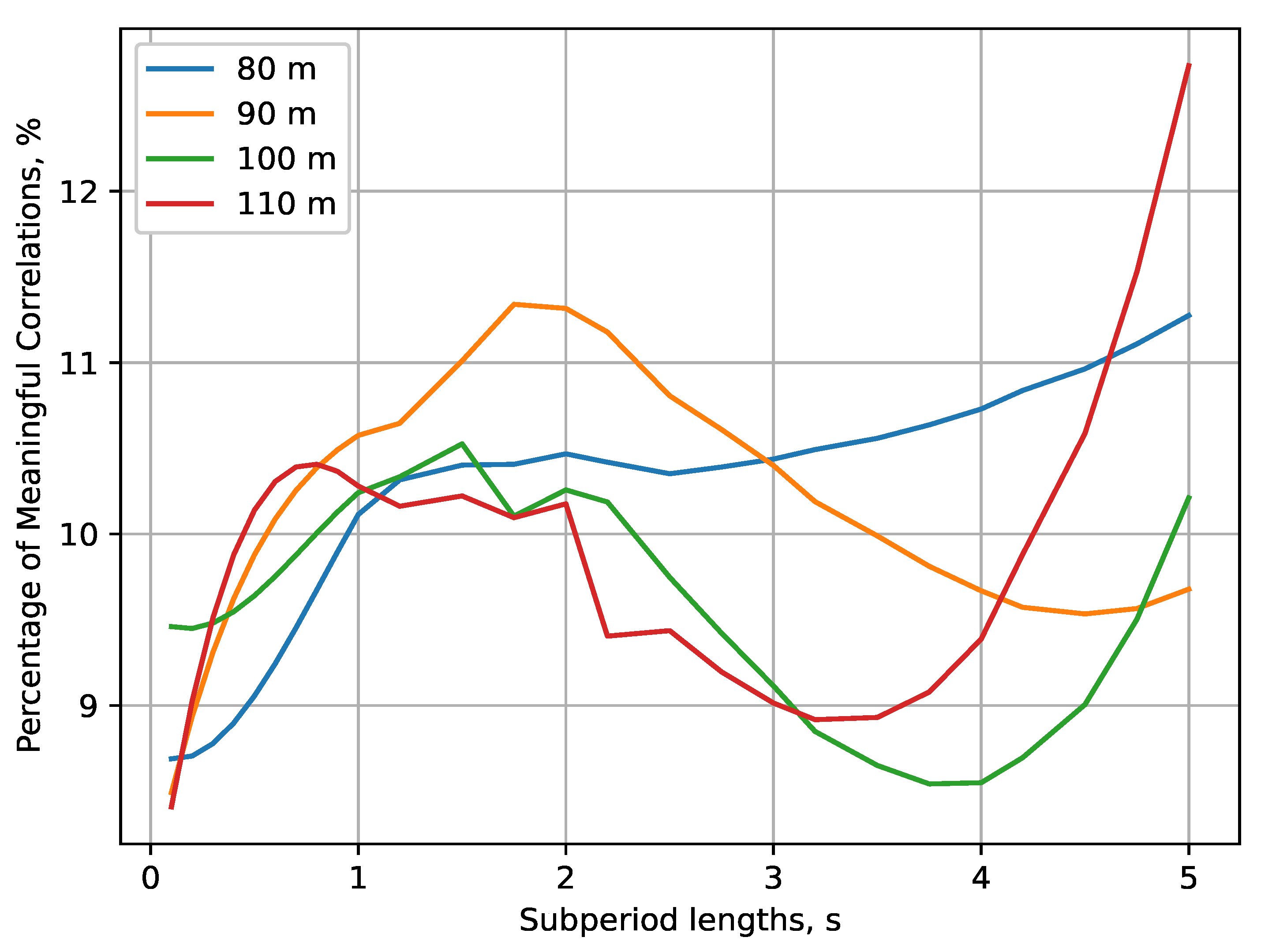
- The frequency domain analysis shows that for weakly correlated signals, the mean power in the subbands does not significantly contribute to the information about spectrum utilization. Nevertheless, in the case of strong reception, there is a high correlation in particular subbands that reveals the nonuniformity of the sensed UAV communication signals in the frequency domain. They do not occupy the whole ISM channel, as is usually the case with other license-free wireless standards, which provides the opportunity for further studies to explore the potential for increased spectrum utilization in bands of 5 MHz width. This consideration may benefit the investigation of applications such as transmitting source identification through modulation classification, or duty cycle estimation [53].
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 2D | Two-dimensional |
| 3D | Three-dimensional |
| 5G | Fifth Generation |
| A2A | Air-to-air |
| BS | Base station |
| CKM | Channel knowledge map |
| CR | Cognitive radio |
| DSA | Dynamic spectrum access |
| ISM | Industrial, Scientific, and Medical |
| IQ | In-phase/quadrature |
| KPI | Key performance indicator |
| PL | Path loss |
| QoS | Quality of service |
| RC | Remote control |
| REM | Radio environment map |
| RF | Radio frequency |
| RoI | Region of interest |
| RT | Ray tracing |
| RSS | Radio signal strength |
| SDR | Software-defined radio |
| TV | Television |
| UAV | Unmanned aerial vehicle |
| UAS | Unmanned aerial system |
References
- Tataria, H.; Shafi, M.; Molisch, A.F.; Dohler, M.; Sjöland, H.; Tufvesson, F. 6G wireless systems: Vision, requirements, challenges, insights, and opportunities. Proc. IEEE 2021, 109, 1166–1199. [Google Scholar] [CrossRef]
- Giordani, M.; Polese, M.; Mezzavilla, M.; Rangan, S.; Zorzi, M. Toward 6G networks: Use cases and technologies. IEEE Commun. Mag. 2020, 58, 55–61. [Google Scholar] [CrossRef]
- Bajracharya, R.; Shrestha, R.; Kim, S.; Jung, H. 6G NR-U Based Wireless Infrastructure UAV: Standardization, Opportunities, Challenges and Future Scopes. IEEE Access 2022, 10, 30536–30555. [Google Scholar]
- Nemati, M.; Al Homssi, B.; Krishnan, S.; Park, J.; Loke, S.W.; Choi, J. Non-Terrestrial Networks with UAVs: A Projection on Flying Ad-Hoc Networks. Drones 2022, 6, 334. [Google Scholar] [CrossRef]
- Benzaghta, M.; Geraci, G.; Nikbakht, R.; Lopez-Perez, D. UAV Communications in Integrated Terrestrial and Non-terrestrial Networks. arXiv 2022, arXiv:2208.02683. [Google Scholar]
- Jasim, M.A.; Shakhatreh, H.; Siasi, N.; Sawalmeh, A.H.; Aldalbahi, A.; Al-Fuqaha, A. A survey on spectrum management for unmanned aerial vehicles (uavs). IEEE Access 2021, 10, 11443–11499. [Google Scholar] [CrossRef]
- Dao, N.N.; Pham, Q.V.; Tu, N.H.; Thanh, T.T.; Bao, V.N.Q.; Lakew, D.S.; Cho, S. Survey on aerial radio access networks: Toward a comprehensive 6G access infrastructure. IEEE Commun. Surv. Tutor. 2021, 23, 1193–1225. [Google Scholar]
- Saleem, Y.; Rehmani, M.H.; Zeadally, S. Integration of cognitive radio technology with unmanned aerial vehicles: Issues, opportunities, and future research challenges. J. Netw. Comput. Appl. 2015, 50, 15–31. [Google Scholar] [CrossRef]
- Martinez-Alpiste, I.; Golcarenarenji, G.; Wang, Q.; Alcaraz-Calero, J.M. Search and rescue operation using UAVs: A case study. Expert Syst. Appl. 2021, 178, 114937. [Google Scholar] [CrossRef]
- Zhang, C.; Zhou, W.; Qin, W.; Tang, W. A novel UAV path planning approach: Heuristic crossing search and rescue optimization algorithm. Expert Syst. Appl. 2022, 215, 119243. [Google Scholar] [CrossRef]
- Yu, X.; Jiang, N.; Wang, X.; Li, M. A hybrid algorithm based on grey wolf optimizer and differential evolution for UAV path planning. Expert Syst. Appl. 2022, 215, 119327. [Google Scholar] [CrossRef]
- Yang, H.; Zhao, J.; Xiong, Z.; Lam, K.Y.; Sun, S.; Xiao, L. Privacy-preserving federated learning for UAV-enabled networks: Learning-based joint scheduling and resource management. IEEE J. Sel. Areas Commun. 2021, 39, 3144–3159. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A vision of 6G wireless systems: Applications, trends, technologies, and open research problems. IEEE Netw. 2019, 34, 134–142. [Google Scholar] [CrossRef]
- Dias Santana, G.M.; Cristo, R.S.d.; Lucas Jaquie Castelo Branco, K.R. Integrating cognitive radio with unmanned aerial vehicles: An overview. Sensors 2021, 21, 830. [Google Scholar] [CrossRef]
- Yilmaz, H.B.; Tugcu, T.; Alagöz, F.; Bayhan, S. Radio environment map as enabler for practical cognitive radio networks. IEEE Commun. Mag. 2013, 51, 162–169. [Google Scholar] [CrossRef]
- Romero, D.; Kim, S.J. Radio Map Estimation: A Data-Driven Approach to Spectrum Cartography. arXiv 2022, arXiv:2202.03269. [Google Scholar] [CrossRef]
- Platzgummer, V.; Raida, V.; Krainz, G.; Svoboda, P.; Lerch, M.; Rupp, M. UAV-based coverage measurement method for 5G. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–6. [Google Scholar]
- Semkin, V.; Kang, S.; Haarla, J.; Xia, W.; Huhtinen, I.; Geraci, G.; Lozano, A.; Loianno, G.; Mezzavilla, M.; Rangan, S. Lightweight UAV-based measurement system for air-to-ground channels at 28 GHz. In Proceedings of the 2021 IEEE 32nd Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Helsinki, Finland, 13–16 September 2021; pp. 848–853. [Google Scholar]
- Du, X.; Zhu, Q.; Ding, G.; Li, J.; Wu, Q.; Lan, T.; Lin, Z.; Zhong, W.; Han, L. UAV-Assisted Three-Dimensional Spectrum Mapping Driven by Spectrum Data and Channel Model. Symmetry 2021, 13, 2308. [Google Scholar] [CrossRef]
- Shrestha, R.; Romero, D.; Chepuri, S.P. Spectrum Surveying: Active Radio Map Estimation with Autonomous UAVs. arXiv 2022, arXiv:2201.04125. [Google Scholar] [CrossRef]
- Wei, Z.; Yao, R.; Kang, J.; Chen, X.; Wu, H. Three-Dimensional Spectrum Occupancy Measurement using UAV: Performance Analysis and Algorithm Design. IEEE Sens. J. 2022, 22, 9146–9157. [Google Scholar] [CrossRef]
- Shen, F.; Ding, G.; Wu, Q. Efficient Remote Compressed Spectrum Mapping in 3D Spectrum-heterogeneous Environment with Inaccessible Areas. IEEE Wirel. Commun. Lett. 2022, 11, 1488–1492. [Google Scholar] [CrossRef]
- Wu, Q.; Shen, F.; Wang, Z.; Ding, G. 3D spectrum mapping based on ROI-driven UAV deployment. IEEE Netw. 2020, 34, 24–31. [Google Scholar] [CrossRef]
- Horsmanheimo, S.; Tuomimäki, L.; Semkin, V.; Mehnert, S.; Chen, T.; Ojennus, M.; Nykänen, L. 5G Communication QoS Measurements for Smart City UAV Services. In Proceedings of the 2022 16th European Conference on Antennas and Propagation (EuCAP), Madrid, Spain, 27 March–1 April 2022; pp. 1–5. [Google Scholar]
- Li, H.; Li, P.; Xu, J.; Chen, J.; Zeng, Y. Channel Knowledge Map (CKM)-Assisted Multi-UAV Wireless Network: CKM Construction and UAV Placement. arXiv 2022, arXiv:2207.01931. [Google Scholar]
- Zeng, Y.; Xu, X.; Jin, S.; Zhang, R. Simultaneous navigation and radio mapping for cellular-connected UAV with deep reinforcement learning. IEEE Trans. Wirel. Commun. 2021, 20, 4205–4220. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef]
- Sathya, V.; Kala, S.M.; Rochman, M.I.; Ghosh, M.; Roy, S. Standardization advances for cellular and Wi-Fi coexistence in the unlicensed 5 and 6 GHz bands. GetMobile Mobile Comput. Commun. 2020, 24, 5–15. [Google Scholar] [CrossRef]
- Maiti, P.; Mitra, D. Ordinary kriging interpolation for indoor 3D REM. J. Ambient Intell. Hum. Comput. 2022. [Google Scholar] [CrossRef]
- Gill, K.S.; Nguyen, S.; Thein, M.M.; Wyglinski, A.M. Three-Way Deep Neural Network for Radio Frequency Map Generation and Source Localization. arXiv 2021, arXiv:2111.12175. [Google Scholar]
- Shen, F.; Wang, Z.; Ding, G.; Li, K.; Wu, Q. 3D Compressed Spectrum Mapping With Sampling Locations Optimization in Spectrum-Heterogeneous Environment. IEEE Trans. Wirel. Commun. 2021, 21, 326–338. [Google Scholar] [CrossRef]
- Teganya, Y.; Romero, D. Deep completion autoencoders for radio map estimation. IEEE Trans. Wirel. Commun. 2021, 21, 1710–1724. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, X. Toward environment-aware 6G communications via channel knowledge map. IEEE Wirel. Commun. 2021, 28, 84–91. [Google Scholar] [CrossRef]
- Ivanov, A.; Bilal, M.; Tonchev, K.; Mihovska, A.; Poulkov, V. Challenges for Volumetric Measurements Toward Radio Environment Map Construction for UAV Communications. In Proceedings of the 25th International Symposium on Wireless Personal Multimedia Communications, Herming, Denmark, 30 October–2 November 2022. [Google Scholar]
- Freefly Systems. ALTA X I. Available online: https://freeflysystems.com/alta-x/specs (accessed on 19 September 2022).
- DJI. Matrice 600 Pro. Available online: https://www.dji.com/bg/matrice600-pro/info (accessed on 19 September 2022).
- DJI. Inspire 2. Available online: https://www.dji.com/bg/inspire-2/info (accessed on 19 September 2022).
- DJI. Mavic 2 Enterprise Dual. Available online: https://www.dji.com/bg/mavic-2-enterprise-advanced/specs (accessed on 19 September 2022).
- Nuand. bladeRF 2.0 Micro. Available online: https://www.nuand.com/bladerf-2-0-micro/ (accessed on 19 September 2022).
- Tian, F.; Li, H.; Yuan, L. Design and implementation of AD9361-based software radio receiver. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 95. [Google Scholar] [CrossRef]
- Molla, D.M.; Badis, H.; George, L.; Berbineau, M. Software Defined Radio Platforms for Wireless Technologies. IEEE Access 2022, 10, 26203–26229. [Google Scholar] [CrossRef]
- The GNU Radio Foundation. GNU Radio, the Free and Open Software Radio Ecosystem. Available online: https://www.gnuradio.org/ (accessed on 19 September 2022).
- Yates, R.; Lyons, R. DC blocker algorithms [DSP Tips & Tricks]. IEEE Signal Process. Mag. 2008, 25, 132–134. [Google Scholar]
- Ma, Z.; Ai, B.; He, R.; Wang, G.; Niu, Y.; Zhong, Z. A wideband non-stationary air-to-air channel model for UAV communications. IEEE Trans. Veh. Technol. 2019, 69, 1214–1226. [Google Scholar] [CrossRef]
- Khuwaja, A.A.; Chen, Y.; Zhao, N.; Alouini, M.S.; Dobbins, P. A survey of channel modeling for UAV communications. IEEE Commun. Surv. Tutor. 2018, 20, 2804–2821. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, Z.; Jiang, H.; Qian, Y.; Liu, K.; Dang, J.; Wu, L. Measurement-based characterization and modeling for low-altitude UAV air-to-air channels. IEEE Access 2019, 7, 98832–98840. [Google Scholar] [CrossRef]
- Ma, Z.; Ai, B.; He, R.; Zhong, Z. A 3D air-to-air wideband non-stationary channel model of UAV communications. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–5. [Google Scholar]
- Bishara, A.J.; Hittner, J.B. Reducing bias and error in the correlation coefficient due to nonnormality. Educ. Psychol. Meas. 2015, 75, 785–804. [Google Scholar] [CrossRef]
- Ivanov, A.; Tonchev, K.; Poulkov, V.; Manolova, A. Probabilistic spectrum sensing based on feature detection for 6G cognitive radio: A survey. IEEE Access 2021, 9, 116994–117026. [Google Scholar] [CrossRef]
- Solanki, S.; Dehalwar, V.; Choudhary, J. Deep learning for spectrum sensing in cognitive radio. Symmetry 2021, 13, 147. [Google Scholar] [CrossRef]
- Shang, B.; Marojevic, V.; Yi, Y.; Abdalla, A.S.; Liu, L. Spectrum sharing for UAV communications: Spatial spectrum sensing and open issues. IEEE Veh. Technol. Mag. 2020, 15, 104–112. [Google Scholar] [CrossRef]
- Hashesh, A.O.; Hashima, S.; Zaki, R.M.; Fouda, M.M.; Hatano, K.; Eldien, A.S.T. AI-Enabled UAV Communications: Challenges and Future Directions. IEEE Access 2022, 10, 92048–92066. [Google Scholar] [CrossRef]
- Yan, X.; Rao, X.; Wang, Q.; Wu, H.C.; Zhang, Y.; Wu, Y. Novel Cooperative Automatic Modulation Classification Using Unmanned Aerial Vehicles. IEEE Sens. J. 2021, 21, 28107–28117. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Application | Contribution | Realization of Experiments | Transmitter Sources | Carrier Frequency | Bandwidth | Notes |
|---|---|---|---|---|---|---|---|
| [17] | Cellular coverage mapping | Methodology for UAV-based measurements and REM construction | Real-time measurement collection via UAV-mounted UEs | Single stationary LTE BS | 800 MHz | 20 MHz | Custom drone and measurement hardware |
| [18] | mmWave measurement system | UAV-based REM measurements methodology; path loss and radiation patterns estimation | Real-time measurement collection via a lightweight spectrum analyzer | Single stationary mmWave transmitter | 28 GHz | ≈1 GHz | Custom drone and measurement hardware |
| [19] | REM construction from limited measurements | REM estimation via statistical signal inference | Simulation via RT and statistical modeling | Single stationary transmitter | 100 MHz | 5 MHz | - |
| [20] | UAV flight path optimization | REM estimation via deep autoencoders combined with a Bayesian estimator | Simulation via RT and statistical modeling | Multiple stationary transmitters | 2.4 GHz | 5 MHz | - |
| [21] | Cellular coverage mapping; UAV flight path optimization | 3D REM estimation from limited UAV measurements | Simulation via statistical modeling | Multiple stationary transmitters | Not applicable (N/A) | N/A | Number of measurement locations determined |
| [22] | UAV flight path optimization | 3D REM interpolation from limited measurements | Simulation via statistical modeling | Multiple stationary transmitters | 100 MHz | 200 kHz | - |
| [23] | UAV flight path optimization | 3D REM interpolation from limited measurements | Simulation via statistical modeling | Multiple stationary transmitters | 100 MHz | 200 kHz | - |
| [24] | Cellular coverage mapping | UAV-based REM measurements for 5G network performance assessment | Real-time measurement collection via a UAV-mounted UE | Single stationary 5G BS | 3.5 GHz | 100 MHz | Custom drone, measurement software, and hardware |
| [25] | UAV flight path optimization for numerous UAV-BS connections | REM interpolation from limited measurements; throughput maximization for UAV communications | Simulation via RT | Multiple stationary cellular BSs | N/A | N/A | - |
| [26] | UAV flight path optimization; prediction of BS coverage outage regions; | Minimization of flight time and outage duration via DRL | Simulation via statistical modeling | Multiple stationary cellular BSs | N/A | N/A | - |
| [29] | TV channels coverage mapping | 3D REM interpolation | Real-time measurement collection via a stationary SDR | Single stationary TV transmitter | 470–590 MHz | 25 MHz | Sensing performed via USRP SDR |
| [31] | REM construction from limited measurements | 3D REM estimation via orthogonal matching pursuit | Simulation via statistical modeling | Multiple stationary transmitters | N/A | 200 kHz | - |
| [32] | REM construction from limited measurements | REM estimation via deep autoencoders | Simulation via RT and statistical modeling | Multiple stationary transmitters | 2.4 GHz | 5 MHz | - |
| This work | Spectrum occupancy characterization for UAV communications | REM-based analysis of the ISM band in the temporal, spatial, and frequency domains | Real-time measurement collection via UAV-mounted SDR | Multiple airborne UAV nodes | 2.4 GHz | 20 MHz | Sensing performed via BladeRF SDR |
| UAV Model | Dimensions | Radio Controller | Operating Frequency | Maximum Flight Time |
|---|---|---|---|---|
| Freefly ALTA X (sensor UAV) [35] | Diameter (unfolded)—2273 mm/Height—387 mm | Futaba T14SG | 2.4 GHz | ≈15 min |
| DJI Matrice 600 Pro [36] | 1668 mm × 1518 mm (unfolded)/Height—727 mm | Dual remote control with HDMI output | 5.725–5.825 GHz; 2.400–2.483 GHz | ≈38 min |
| DJI Inspire 2 [37] | Diameter—605 mm | Dual remote control with HDMI output | 2.400–2.483 GHz; 5.725–5.825 GHz | ≈27 min |
| DJI Mavic 2 Enterprise Dual [38] | 322 mm × 242 mm (unfolded)/Height—84 mm | Smart Controller with OcuSync 2.0 | 2.400–2.4835 GHz; 5.150–5.250 GHz; 5.725–5.850 GHz | ≈27 min |
| Subband 1: 0–5 MHz | Subband 2: 5–10 MHz | Subband 3: 10–15 MHz | Subband 4: 15–20 MHz | |
|---|---|---|---|---|
| Altitude 80 m | 10.53% | 10.53% | 5.26% | 2.63% |
| Altitude 90 m | 10.53% | 0% | 2.63% | 5.26% |
| Altitude 100 m | 7.69% | 0% | 7.69% | 2.56% |
| Altitude 110 m | 20.51% | 7.69% | 2.56% | 10.26% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ivanov, A.; Muhammad, B.; Tonchev, K.; Mihovska, A.; Poulkov, V. UAV-Based Volumetric Measurements toward Radio Environment Map Construction and Analysis. Sensors 2022, 22, 9705. https://doi.org/10.3390/s22249705
Ivanov A, Muhammad B, Tonchev K, Mihovska A, Poulkov V. UAV-Based Volumetric Measurements toward Radio Environment Map Construction and Analysis. Sensors. 2022; 22(24):9705. https://doi.org/10.3390/s22249705
Chicago/Turabian StyleIvanov, Antoni, Bilal Muhammad, Krasimir Tonchev, Albena Mihovska, and Vladimir Poulkov. 2022. "UAV-Based Volumetric Measurements toward Radio Environment Map Construction and Analysis" Sensors 22, no. 24: 9705. https://doi.org/10.3390/s22249705
APA StyleIvanov, A., Muhammad, B., Tonchev, K., Mihovska, A., & Poulkov, V. (2022). UAV-Based Volumetric Measurements toward Radio Environment Map Construction and Analysis. Sensors, 22(24), 9705. https://doi.org/10.3390/s22249705