

Piston Sensing for Golay-6 Sparse Aperture System with Double-Defocused Sharpness Metrics via ResNet-34
Abstract
:1. Introduction
2. Method
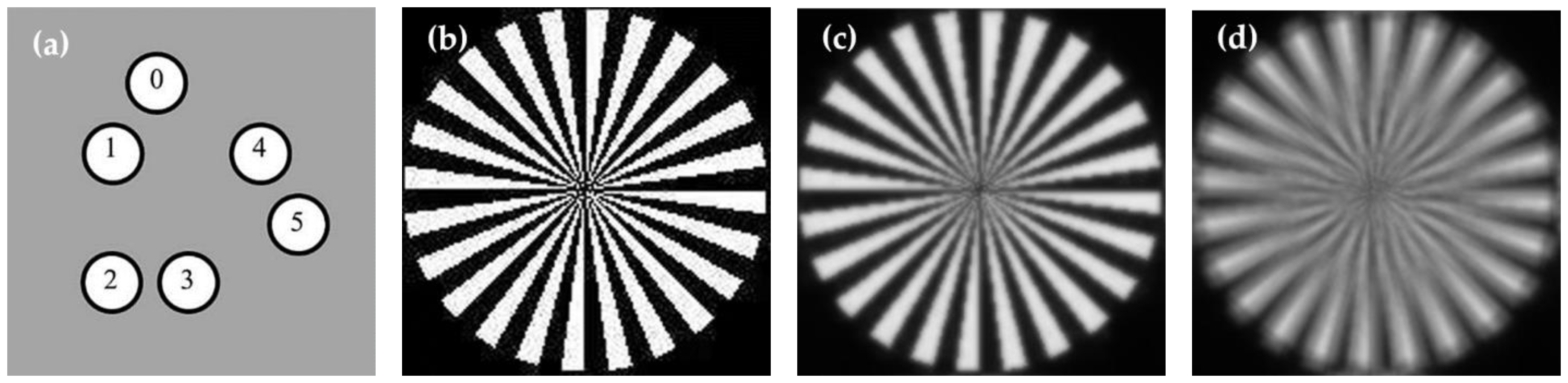
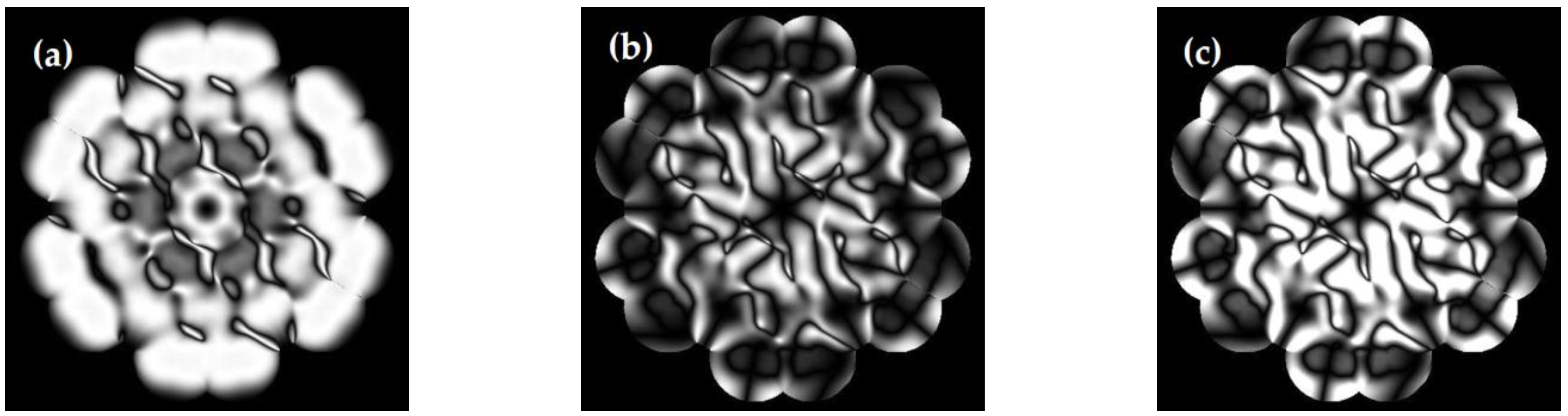
2.1. Basic Optical Principle and Alternative Metrics
2.2. ResNet-34 Structure and Loss Function
2.3. Data Sets and Training
3. Results
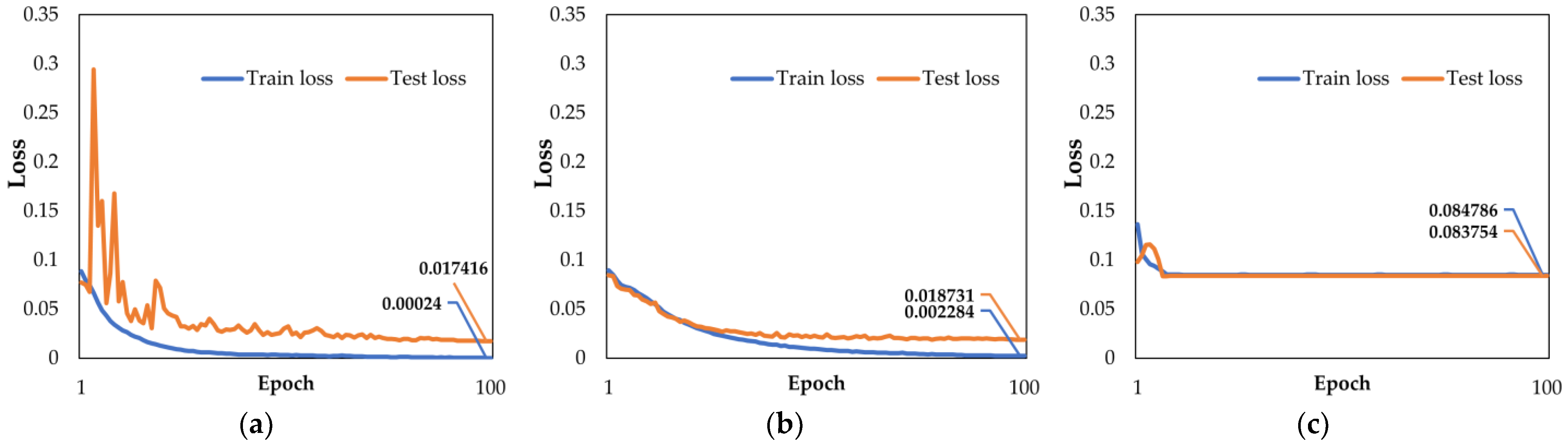
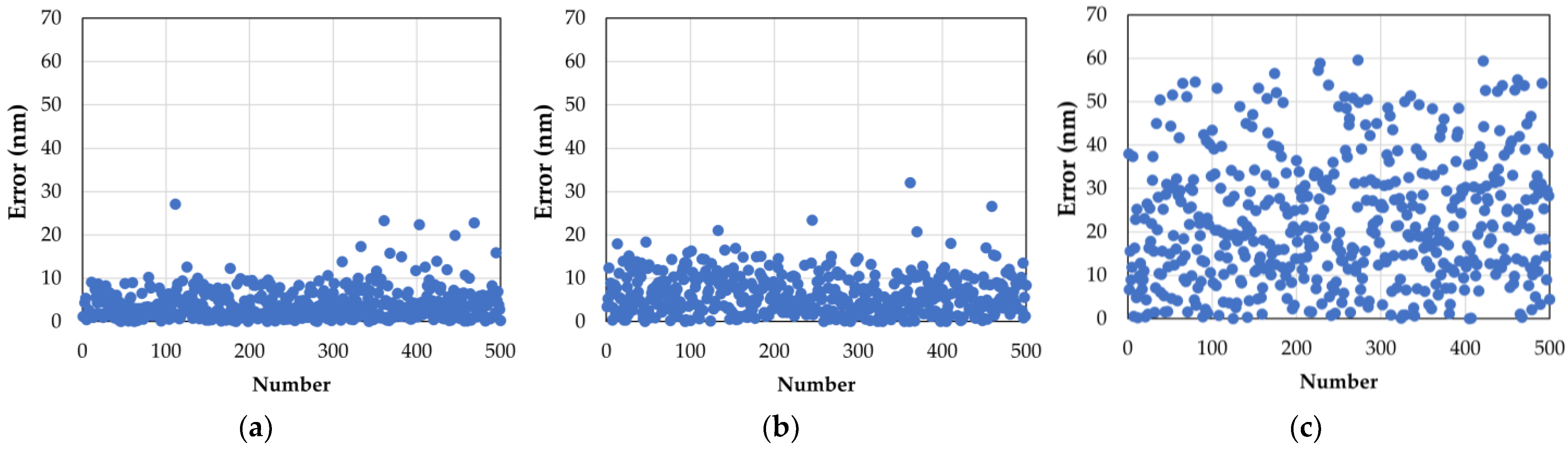
3.1. Performance and Comparison between ResNet-34, VGG-16, and Alex Net
3.2. Performance of the Piston Sensing, Based on Double-Defocused Sharpness Metrics
3.3. Further Improvements
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Clampin, M. Status of the James Webb Space Telescope (IWST); International Society for Optics and Photonics: Bellingham, WA, USA, 2008; p. 70100L. [Google Scholar]
- Meinel, A.B.; Meinel, M.P. Large sparse aperture space optical systems. Opt. Eng. 2002, 41, 1983–1994. [Google Scholar] [CrossRef]
- Golay, M.J. Point arrays having compact, nonredundant autocorrelations. JOSA 1971, 61, 272–273. [Google Scholar] [CrossRef]
- DeYoung, D.B.; Dillow, J.D. Ground Demonstration of an Optical Control System for a Space-Based Sparse-Aperture Telescope; International Society for Optics and Photonics: Bellingham, WA, USA, 1998; pp. 1156–1167. [Google Scholar]
- Wu, Q.; Qian, L. Image Recovering for Sparse-Aperture Systems; International Society for Optics and Photonics: Bellingham, WA, USA, 2005; pp. 478–486. [Google Scholar]
- Li, X.; Yang, X. The piston error recognition technique used in the modified shack–hartmann sensor. Opt. Commun. 2021, 501, 127388. [Google Scholar] [CrossRef]
- Bolcar, M. Phase Diversity for Segmented and Multi-Aperture Systems. Ph.D. Thesis, University of Rochester, New York, NY, USA, 2008. [Google Scholar]
- Nishizaki, Y.; Valdivia, M. Deep learning wavefront sensing. Opt. Express 2019, 27, 240–251. [Google Scholar] [CrossRef] [PubMed]
- Guerra-Ramos, D.; Díaz-García, L. Piston alignment of segmented optical mirrors via convolutional neural networks. Opt. Lett. 2018, 43, 4264–4267. [Google Scholar] [CrossRef] [PubMed]
- Ma, X.; Xie, Z. Piston sensing for sparse aperture systems with broadband extended objects via a single convolutional neural network. Opt. Lasers Eng. 2020, 128, 106005. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, F. Deep learning wavefront sensing for fine phasing of segmented mirrors. Opt. Express 2021, 29, 25960–25978. [Google Scholar] [CrossRef] [PubMed]
- Kendrick, R.L.; Acton, D.S. Phase-diversity wave-front sensor for imaging systems. Appl. Opt. 1994, 33, 6533–6546. [Google Scholar] [CrossRef] [PubMed]
- Gao, M.; Qi, D. A transfer residual neural network based on resnet-34 for detection of wood knot defects. Forests 2021, 12, 212. [Google Scholar] [CrossRef]
- Xu, M. The Method of Cophase Detection and Correction for Optical Synthetic Aperture Imaging. Master’s Thesis, Xi’an Technological University, Xi’an, China, 2020. [Google Scholar]
- Pietikäinen, M.; Hadid, A. Computer Vision Using Local Binary Patterns; Springer Science & Business Media: Berlin, Germany, 2011. [Google Scholar]
- Yan, W. Research on Feature Extraction Approach of Images. Master’s Thesis, Northwestern Polytechnical University, Xi’an, China, 2007. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer Name | Output Size | Residual Module | Layers |
|---|---|---|---|
| Conv1 | 112 × 112 | 0 | , stride 2 3 3 max pool, stride 2 |
| Conv2 | 56 × 56 | 3 | |
| Conv3 | 28 × 28 | 4 | |
| Conv4 | 14 × 14 | 6 | |
| Conv5 | 7 × 7 | 3 | |
| FC | 1 × 1 | 0 | average pool, FC |
| Hardware Environment | Software Environment | ||
|---|---|---|---|
| Memory | 16 GB | System | Windows 11 |
| CPU | 12th Gen Intel (R) Core (TM) i7-12700H 2.30 GHz | Platform | PyCharm 2021 |
| Graphics card | NVIDIA GeForce RTX 3060 laptop GPU | Environment | Python 3.7 (Troch main) |
| Evaluation | Model | Sub-a0 | Sub-a2 | Sub-a3 | Sub-a4 | Sub-a5 | Mean |
|---|---|---|---|---|---|---|---|
| Sensing Accuracy | VGG-16 | 21.00% | 20.10% | 19.30% | 20.20% | 17.80% | 19.68% |
| Alex Net | 93.90% | 97.10% | 88.60% | 93.40% | 99.30% | 94.68% | |
| ResNet-34 | 98.50% | 96.70% | 92.10% | 93.30% | 88.30% | 93.78% | |
| RMSE/nm | VGG-16 | 38.45 | 35.91 | 37.23 | 34.55 | 36.62 | 36.55 |
| Alex Net | 19.91 | 17.26 | 25.41 | 21.50 | 12.64 | 19.35 | |
| ResNet-34 | 8.29 | 14.26 | 15.75 | 14.73 | 26.51 | 15.91 |
| Evaluation | Metric | Sub-a0 | Sub-a2 | Sub-a3 | Sub-a4 | Sub-a5 | Mean |
|---|---|---|---|---|---|---|---|
| Sensing Accuracy | PM | 98.50% | 96.70% | 92.10% | 93.30% | 88.30% | 93.78% |
| SM | 95.60% | 95.60% | 93.50% | 95.70% | 99.30% | 95.90% | |
| DSM | 95.80% | 98.20% | 94.60% | 96.40% | 99.00% | 96.80% | |
| RMSE/nm | PM | 8.29 | 14.26 | 15.75 | 14.73 | 26.51 | 15.91 |
| SM | 13.36 | 7.68 | 13.15 | 10.04 | 7.92 | 10.43 | |
| DSM | 12.61 | 6.87 | 13.77 | 10.32 | 5.11 | 9.74 |
| Evaluation | Metric | Sub-a0 | Sub-a2 | Sub-a3 | Sub-a4 | Sub-a5 | Mean |
|---|---|---|---|---|---|---|---|
| Sensing Accuracy | PM | 93.80% | 95.80% | 90.90% | 94.30% | 98.50% | 94.66% |
| SM | 95.70% | 98.50% | 94.10% | 96.90% | 99.30% | 96.9% | |
| DSM | 96.30% | 98.50% | 95.50% | 96.70% | 99.30% | 97.26% | |
| RMSE/nm | PM | 15.87 | 12.06 | 17.35 | 12.79 | 7.53 | 13.11 |
| SM | 11.59 | 6.97 | 13.68 | 11.41 | 5.48 | 9.83 | |
| DSM | 10.11 | 6.97 | 12.41 | 9.12 | 6.40 | 9.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Wu, Q.; Fan, J.; Chen, B.; Chen, X.; Chen, L.; Shen, D.; Yin, L. Piston Sensing for Golay-6 Sparse Aperture System with Double-Defocused Sharpness Metrics via ResNet-34. Sensors 2022, 22, 9484. https://doi.org/10.3390/s22239484
Wang S, Wu Q, Fan J, Chen B, Chen X, Chen L, Shen D, Yin L. Piston Sensing for Golay-6 Sparse Aperture System with Double-Defocused Sharpness Metrics via ResNet-34. Sensors. 2022; 22(23):9484. https://doi.org/10.3390/s22239484
Chicago/Turabian StyleWang, Senmiao, Quanying Wu, Junliu Fan, Baohua Chen, Xiaoyi Chen, Lei Chen, Donghui Shen, and Lidong Yin. 2022. "Piston Sensing for Golay-6 Sparse Aperture System with Double-Defocused Sharpness Metrics via ResNet-34" Sensors 22, no. 23: 9484. https://doi.org/10.3390/s22239484
APA StyleWang, S., Wu, Q., Fan, J., Chen, B., Chen, X., Chen, L., Shen, D., & Yin, L. (2022). Piston Sensing for Golay-6 Sparse Aperture System with Double-Defocused Sharpness Metrics via ResNet-34. Sensors, 22(23), 9484. https://doi.org/10.3390/s22239484