

GPS Spoofing Detection Method for Small UAVs Using 1D Convolution Neural Network

Abstract
1. Introduction
- To our knowledge, this study is the first to deploy a deep learning-based spoofing detection model in drone and validates the model in flight test. Most spoofing detection studies have conducted in simulation environments.
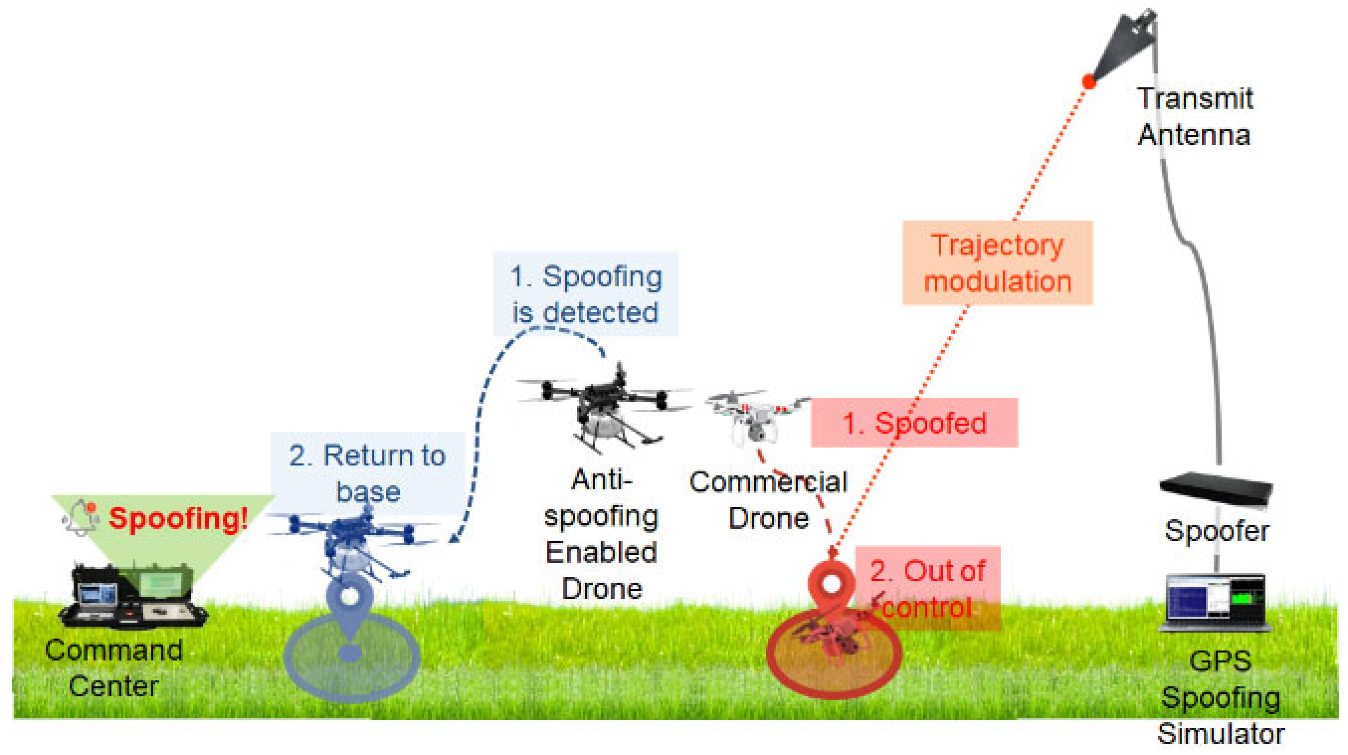
- Previous researches fall short of addressing the defense against an intermediate spoofing attack in real test. However, using 1D CNN model, we could circumvent the attack, whereas commercial drones became out of control in the field test.
- Inference time and power consumption are the important aspects for mobile platform applications. So far, most of related works are only focused on performance of machine learning model. We evaluated them and showed that our proposed method was fitted for the operation of small UAVs.
2. Related Works
2.1. Taxonomy of GPS Spoofing Signals and Attacks
2.1.1. Types of GPS Spoofing Signals
2.1.2. Classification of GPS Spoofing Attacks
2.2. GPS Spoofing Detection Techniques
- M1: Consistency check of data within the GPS PVT (Position, Velocity, Time) solution
- M2: Monitor the relative GPS signal strength
- M3: Monitor the signal strength of each received satellite signal
- M4: Monitor space vehicle identification codes and number of received signals
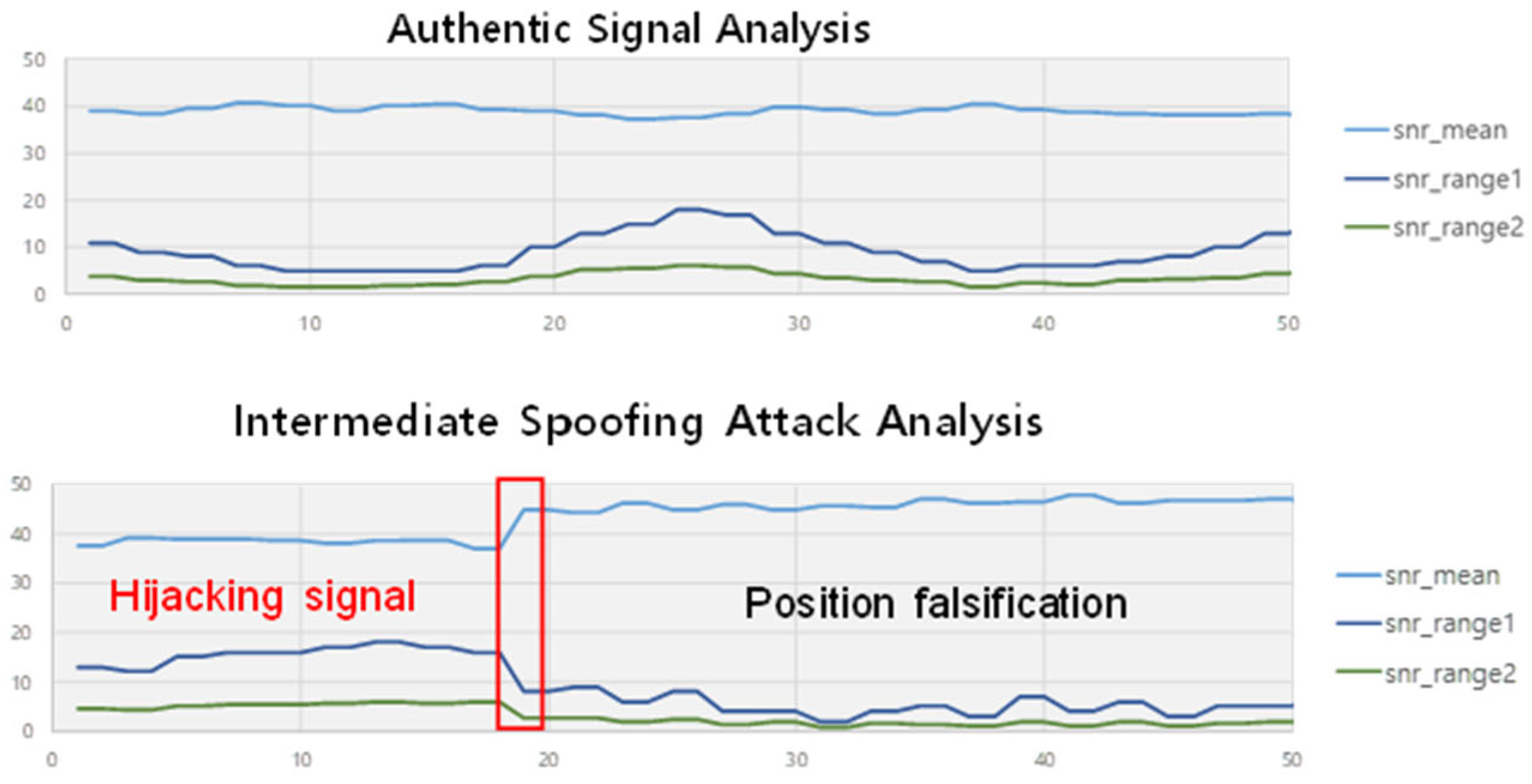
- snr_mean = mean (snr);
- snr_range1 = max (snr) − min (snr);
- snr_range2 = standard deviation (snr);
- where snr is given by the list (SNRs of GPS satellites used in fix).
3. GPS Spoofing Detection Method Based on Deep Learning
3.1. One-dimensional CNN Model
3.2. Data Preprocessing
4. Experiments
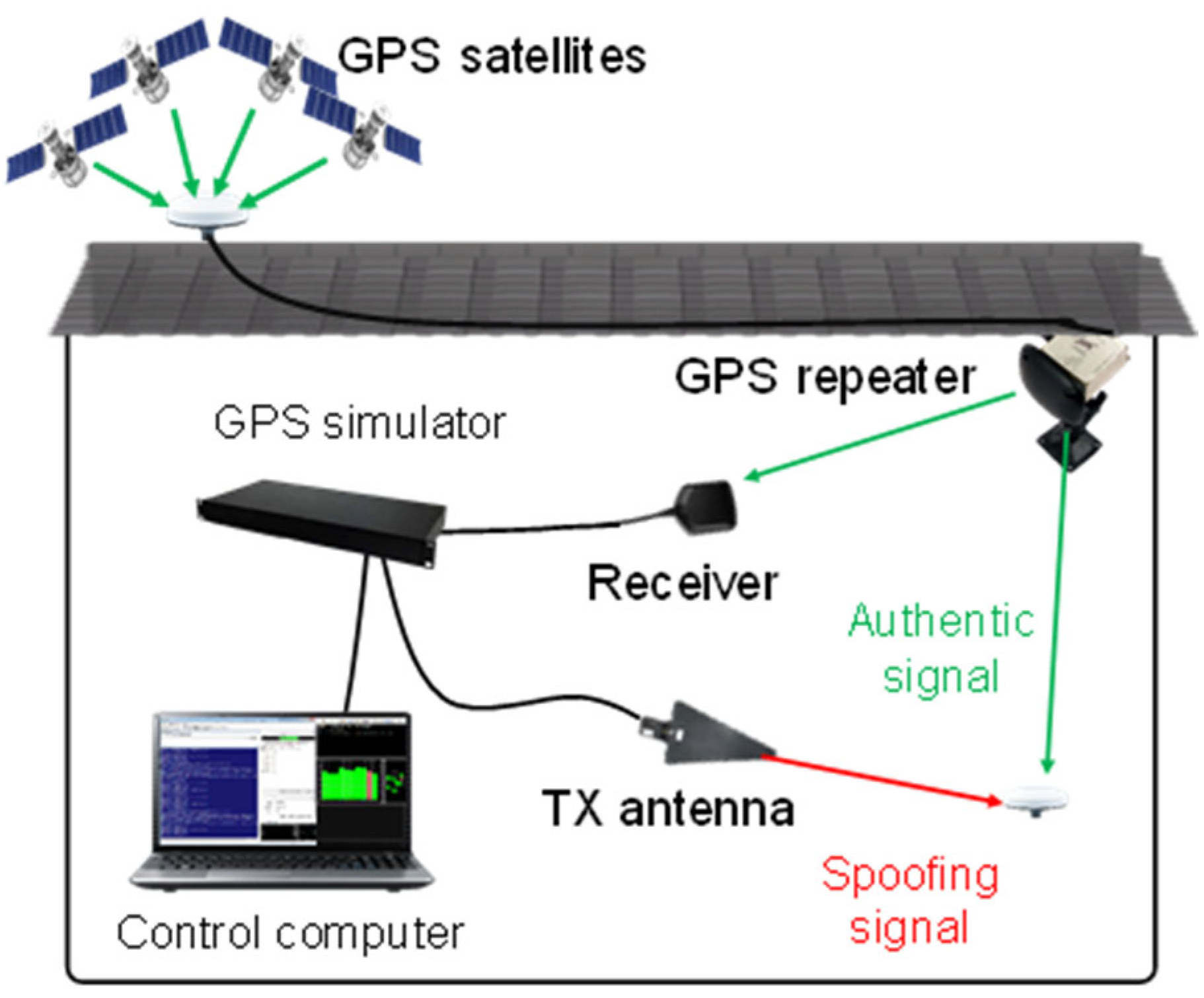
4.1. Environment to Simulate the GPS Spoofing Signal
4.2. Spoofing Data Analysis
4.3. Performance Comparison of Machine Learning Models
4.4. Measurement of Inference Time and Power Consumption
4.5. Field Tests and Results
4.5.1. Validation Test for the GPS Spoofer
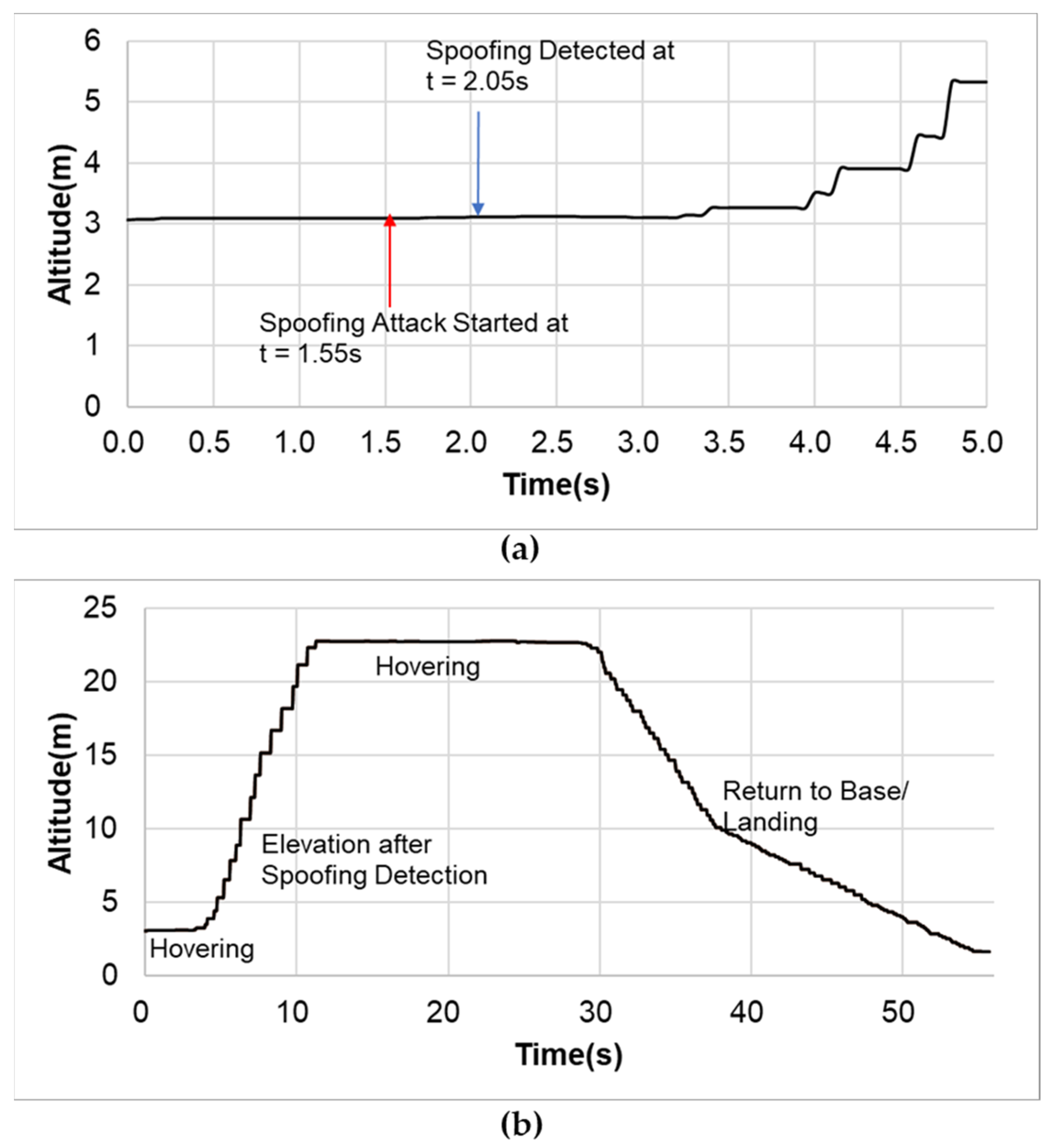
4.5.2. Flight Test Results
- According to various spoofing attack scenarios, constructing database is essential. Sufficient data must be obtained under multi-path environments, various flight conditions and attacks by different types of spoofer.
- Ensemble techniques that combine several machine learning models can be adopted for better prediction. Accommodation of several features may also be helpful. They can compensate the weakness of different sensor data.
- Above approaches should be incorporated and well customized for operational safety over a period of time.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kerns, A.J.; Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E. Unmanned aircraft capture and control via GPS spoofing. J. Field Robot. 2014, 31, 617–636. [Google Scholar] [CrossRef]
- Noh, J.; Kwon, Y.; Son, Y.; Shin, H.; Kim, D.; Choi, J.; Kim, Y. Tractor beam: Safe-hijacking of consumer drones with adaptive GPS spoofing. ACM Trans. Priv. Secur. 2019, 22, 1–26. [Google Scholar] [CrossRef]
- Psiaki, M.L.; Humphreys, T.E. GNSS spoofing and detection. Proc. IEEE 2016, 104, 1258–1270. [Google Scholar] [CrossRef]
- Bernal, S.A.S. Detection Solution Analysis for Simplistic Spoofing Attacks in Commercial Mini and Micro UAVs. Master’s Thesis, University of Tartu, Tartu, Estonia, 2016. [Google Scholar]
- Zhao, R.; Yan, R.; Chen, Z.; Mao, K.; Wang, P.; Gao, R.X. Deep learning and its applications to machine health monitoring. Mech. Syst. Signal Process. 2019, 115, 213–237. [Google Scholar] [CrossRef]
- Kiranyaz, S.; Avci, O.; Abdeljaber, O.; Ince, T.; Gabbouj, M.; Inman, D.J. 1D convolutional neural networks and applications: A survey. Mech. Syst. Signal Process. 2021, 151, 107398. [Google Scholar] [CrossRef]
- Feng, Z.; Guan, N.; Lv, M.; Liu, W.; Deng, Q.; Liu, X.; Yi, W. Efficient drone hijacking detection using two-step GA-XGBoost. J. Syst. Archit. 2020, 103, 101694. [Google Scholar] [CrossRef]
- Tippenhauer, N.O.; Pöpper, C.; Rasmussen, K.B.; Capkun, S. On the requirements for successful GPS spoofing attacks. In Proceedings of the CCS’11: The 18th ACM Conference on Computer and Communications Security, Chicago, IL, USA, 17–21 October 2011; pp. 75–86. [Google Scholar] [CrossRef]
- Humphreys, T.E.; Ledvina, B.M.; Psiaki, M.L.; O’Hanlon, B.W.; Kintner, P.M. Assessing the spoofing threat: Development of a portable GPS civilian spoofer. In Proceedings of the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2008), Savana, GA, USA, 16–19 September 2008; pp. 2314–2325. [Google Scholar]
- Khan, S.Z.; Mohsin, M.; Iqbal, W. On GPS spoofing of aerial platforms: A review of threats, challenges, methodologies, and future research directions. Peer J. Comput. Sci. 2021, 7, e507. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, D.; Radke, K.; Camtepe, S.; Foo, E.; Ren, M. A survey and analysis of the GNSS spoofing threat and countermeasures. ACM Comput. Surv. 2016, 48, 1–31. [Google Scholar] [CrossRef]
- Kwon, K.C.; Shim, D.S. Performance analysis of direct GPS spoofing detection method with AHRS/accelerometer. Sensors 2020, 20, 954. [Google Scholar] [CrossRef] [PubMed]
- Siemuri, A.; Kuusniemi, H.; Elmusrati, M.S.; Valisuo, P.; Shamsuzzoha, A. Machine Learning Utilization in GNSS-Use Cases, Challenges and Future Applications. In Proceedings of the 2021 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 1–3 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Manesh, M.R.; Kenney, J.; Hu, W.C.; Devabhaktuni, V.K.; Kaabouch, N. Detection of GPS spoofing attacks on unmanned aerial systems. In Proceedings of the 2019 16th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Tohidi, S.; Mosavi, M.R. Effective detection of GNSS spoofing attack Using A multi-layer perceptron neural network classifier trained by PSO. In Proceedings of the 2020 25th International Computer Conference, Computer Society of Iran (CSICC), Tehran, Iran, 1–2 January 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Borhani-Darian, P.; Li, H.; Wu, P.; Closas, P. Deep neural network approach to detect GNSS spoofing attacks. In Proceedings of the 33rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS + 2020), Online, 21–25 September 2020; pp. 3241–3252. [Google Scholar] [CrossRef]
- Semanjski, S.; Semanjski, I.; De Wilde, W.; Muls, A. Use of supervised machine learning for GNSS signal spoofing detection with validation on real-world meaconing and spoofing data-Part I. Sensors 2020, 20, 1171. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Wang, J.; Su, C.; Ma, X. Intelligent Detection Algorithm Against UAVs’ GPS Spoofing Attack. In Proceedings of the 2020 IEEE 26th International Conference on Parallel and Distributed Systems (ICPADS), Hong Kong, China, 2–4 December 2020; pp. 382–389. [Google Scholar] [CrossRef]
- Calvo-Palomino, R.; Bhattacharya, A.; Bovet, G.; Giustiniano, D. Short: LSTM-based GNSS spoofing detection using low-cost spectrum sensors. In Proceedings of the 2020 IEEE 21st International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Cork, Ireland, 31 August–3 September 2020; pp. 273–276. [Google Scholar] [CrossRef]
- Shafique, A.; Abid, M.; Mourad, E. Detecting signal spoofing attack in UAVs using machine learning models. IEEE Access 2021, 8, 93803–93815. [Google Scholar] [CrossRef]
- Wei, X.; Wang, Y.; Sun, C. PERDET: Machine-Learning-Based UAV GPS Spoofing Detection Using Perception Data. Remote Sens. 2022, 14, 4925. [Google Scholar] [CrossRef]
- Talaei Khoei, T.; Ismail, S.; Kaabouch, N. Dynamic Selection Techniques for Detecting GPS Spoofing Attacks on UAVs. Sensors 2022, 22, 662. [Google Scholar] [CrossRef] [PubMed]
- Warner, J.S.; Johnston, R.G. GPS spoofing countermeasures. Homel. Secur. J. 2003, 25, 19–27. [Google Scholar]
- GPSd, a GPS Service Daemon. Available online: https://gpsd.gitlab.io/gpsd/index.html (accessed on 30 December 2021).
- Behnke, S. Hierarchical Neural Networks for Image Interpretation; Springer: Berlin/Heidelberg, Germany, 2003; Volume 2766. [Google Scholar]
- Fawaz, H.I.; Forestier, G.; Weber, J.; Idoumghar, L.; Muller, P.A. Deep learning for time series classification: A review. Data Min. Knowl. Discov. 2019, 33, 917–963. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Tobin, J.; Fong, R.; Ray, A.; Schneider, J.; Zaremba, W.; Abbeel, P. Domain randomization for transferring deep neural networks from simulation to the real world. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Abeywickrama, H.V.; Jayawickrama, B.A.; He, Y.; Dutkiewicz, E. Empirical power consumption model for UAVs. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Elmeseiry, N.; Alshaer, N.; Ismail, T. A Detailed Survey and Future Directions of Unmanned Aerial Vehicles (UAVs) with Potential Applications. Aerospace 2021, 8, 363. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal Type | Meaconing | Generative Spoofing |
|---|---|---|
| Navigation message | same | deformed |
| GPS time Accompanied by jamming Target receiver mode | delayed o signal acquisition | synchronized x signal tracking |
| Attack | Spoofer | Target Receiver Mode | Cost | Effectiveness | Practicality |
|---|---|---|---|---|---|
| Simplistic | GPS signal simulator | Signal acquisition | Low | Low | Low |
| Intermediate | Portable receiver spoofer | Signal acquisition/ tracking | Medium | High | High |
| Sophisticated | Multiple phase-locked Portable receiver-spoofers | Signal acquisition/ tracking | Very high | Very high | Low |
| Class | Data |
|---|---|
| TPV | position, time, velocity, error |
| SKY | prn, signal strength, azimuth, used, elevation |
| Predicted Authentic Signal | Predicted Spoofing Signal | |
|---|---|---|
| Actual Authentic Signal | True Positive (TP) | False Negative (FN) |
| Actual Spoofing Signal | False Positive (FP) | True Negative (TN) |
| Model | SVM (Linear) | SVM (RBF) | 1D CNN (ResNet) | |||
|---|---|---|---|---|---|---|
| GPS Signal | Authentic | Spoofing | Authentic | Spoofing | Authentic | Spoofing |
| Authentic | 8191 | 1 | 8189 | 3 | 8192 | 0 |
| Spoof | 54 | 22 | 14 | 62 | 2 | 74 |
| Model | SVM (Linear) | SVM (RBF) | 1D CNN (ResNet) | |||
|---|---|---|---|---|---|---|
| GPS Signal | Authentic | Spoofing | Authentic | Spoofing | Authentic | Spoofing |
| Precision | 0.99 | 0.96 | 1.00 | 0.95 | 1.00 | 1.00 |
| Recall | 1.00 | 0.29 | 1.00 | 0.85 | 1.00 | 0.97 |
| F-1 score | 1.00 | 0.44 | 1.00 | 0.85 | 1.00 | 0.99 |
| Embedded Board | Mode | Power [Watt] | Time (ms) |
|---|---|---|---|
| Jetson AGX Xavier | Idle 30 W | 2.52 | - |
| Running 30 W | 4.65 | 28 | |
| Running 15 W | 4.25 | 32 | |
| Jetson Nano | Idle 10 W | 1.42 | - |
| Running 10 W | 3.63 | 30 | |
| Running 5 W | 2.75 | 47 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sung, Y.-H.; Park, S.-J.; Kim, D.-Y.; Kim, S. GPS Spoofing Detection Method for Small UAVs Using 1D Convolution Neural Network. Sensors 2022, 22, 9412. https://doi.org/10.3390/s22239412
Sung Y-H, Park S-J, Kim D-Y, Kim S. GPS Spoofing Detection Method for Small UAVs Using 1D Convolution Neural Network. Sensors. 2022; 22(23):9412. https://doi.org/10.3390/s22239412
Chicago/Turabian StyleSung, Young-Hwa, Soo-Jae Park, Dong-Yeon Kim, and Sungho Kim. 2022. "GPS Spoofing Detection Method for Small UAVs Using 1D Convolution Neural Network" Sensors 22, no. 23: 9412. https://doi.org/10.3390/s22239412
APA StyleSung, Y.-H., Park, S.-J., Kim, D.-Y., & Kim, S. (2022). GPS Spoofing Detection Method for Small UAVs Using 1D Convolution Neural Network. Sensors, 22(23), 9412. https://doi.org/10.3390/s22239412