
Investigations of Hydrodynamic Force Generated on the Rotating Cylinder Implemented as a Bow Rudder on a Large-Scale Ship Model

Abstract
1. Introduction
2. Materials and Methods
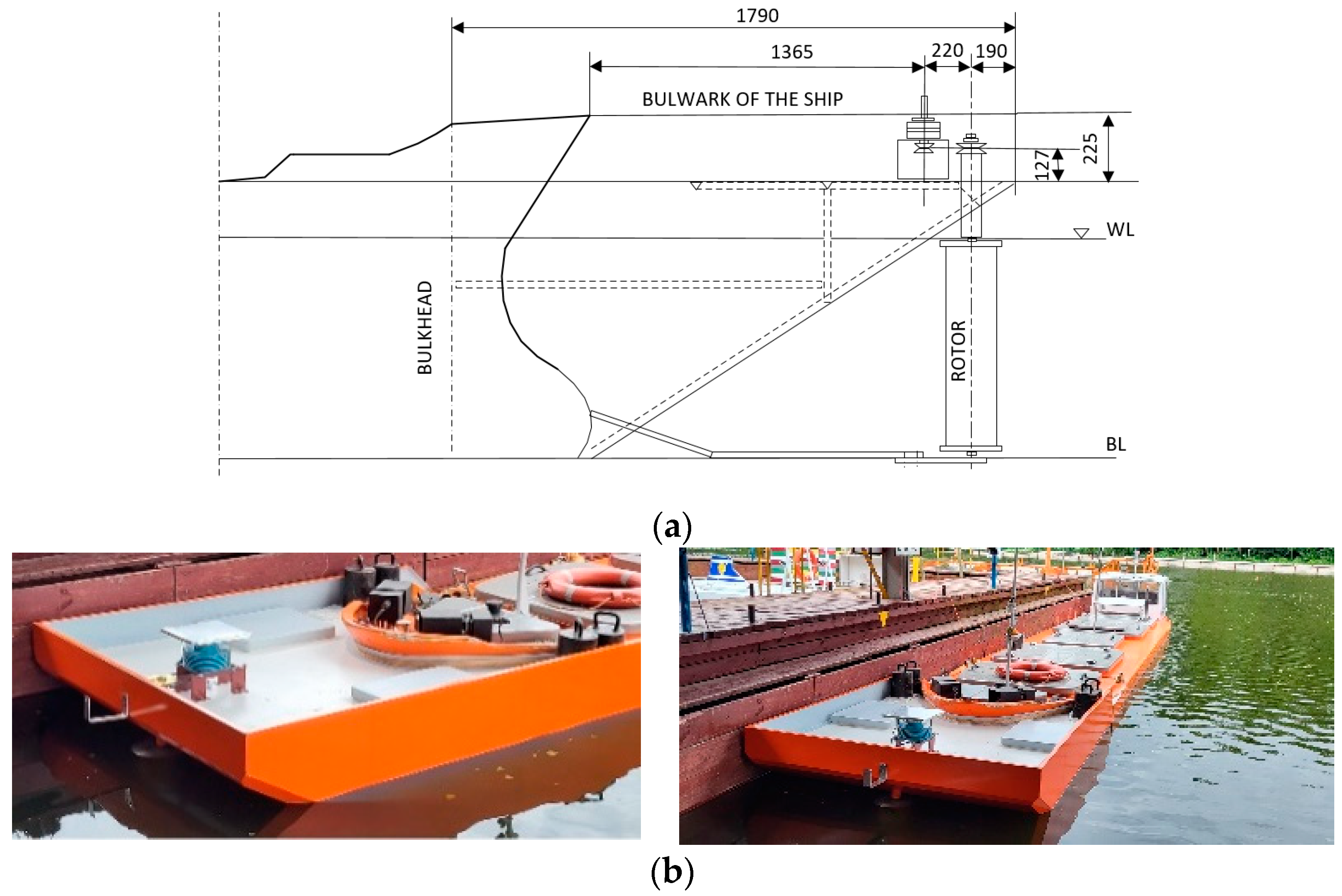
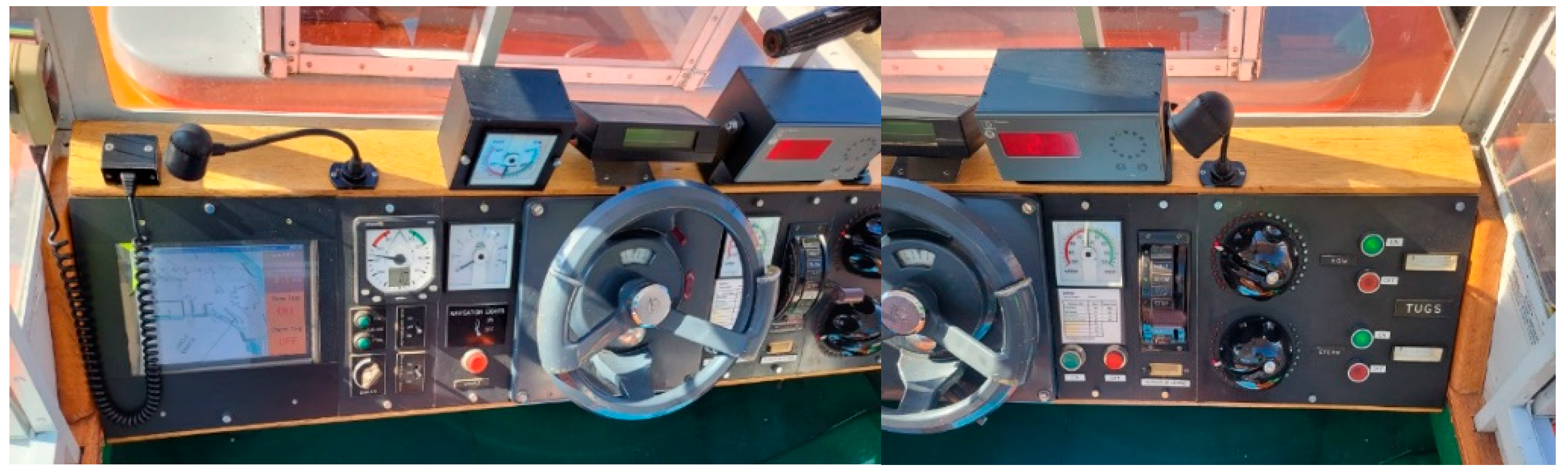
2.1. Experimental Test Setup
2.2. Program of Model Tests
3. Results
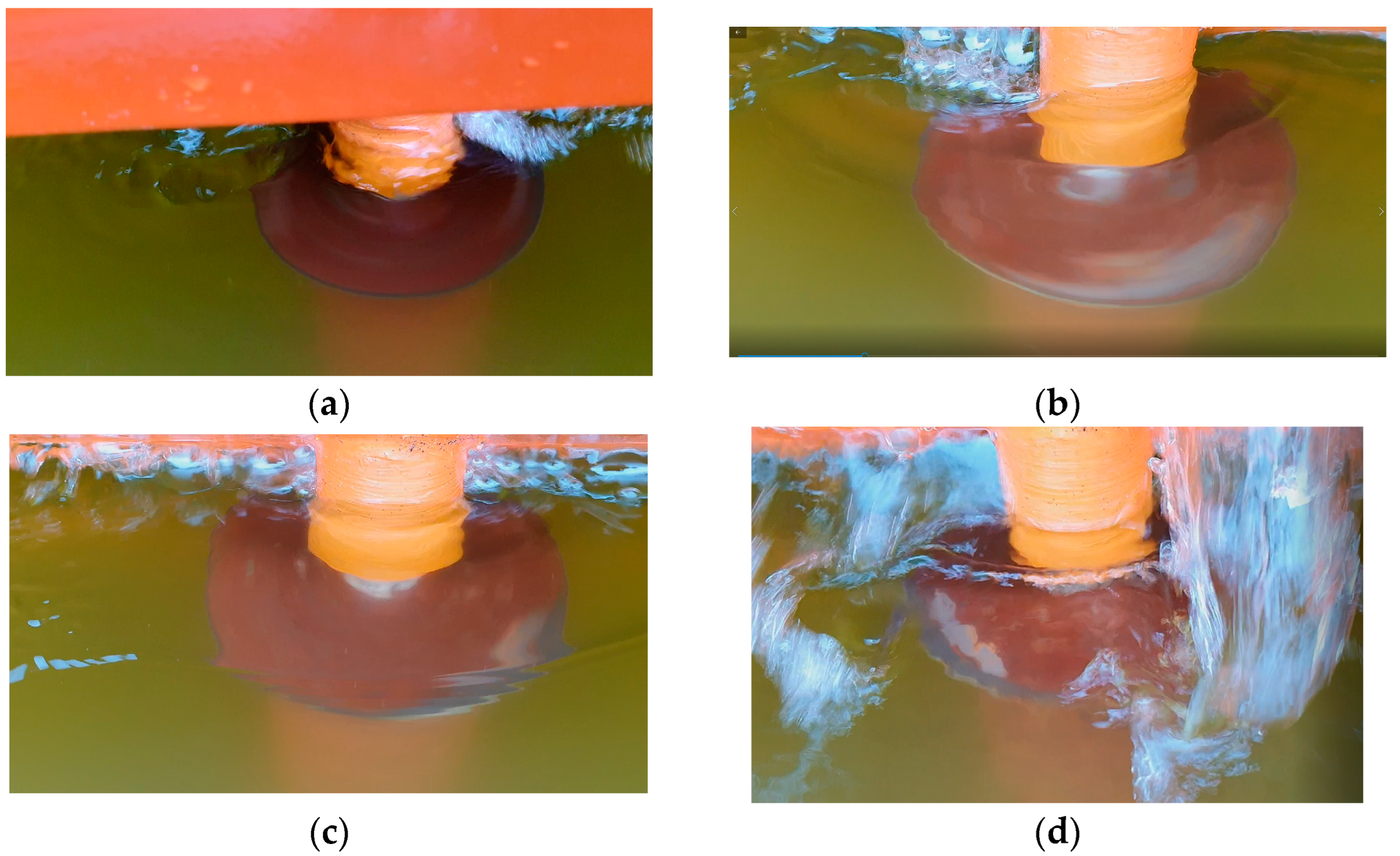
3.1. Rotor-Generated Velocity in Bollard-Pull Conditions
3.2. Steady Course Keeping Trials
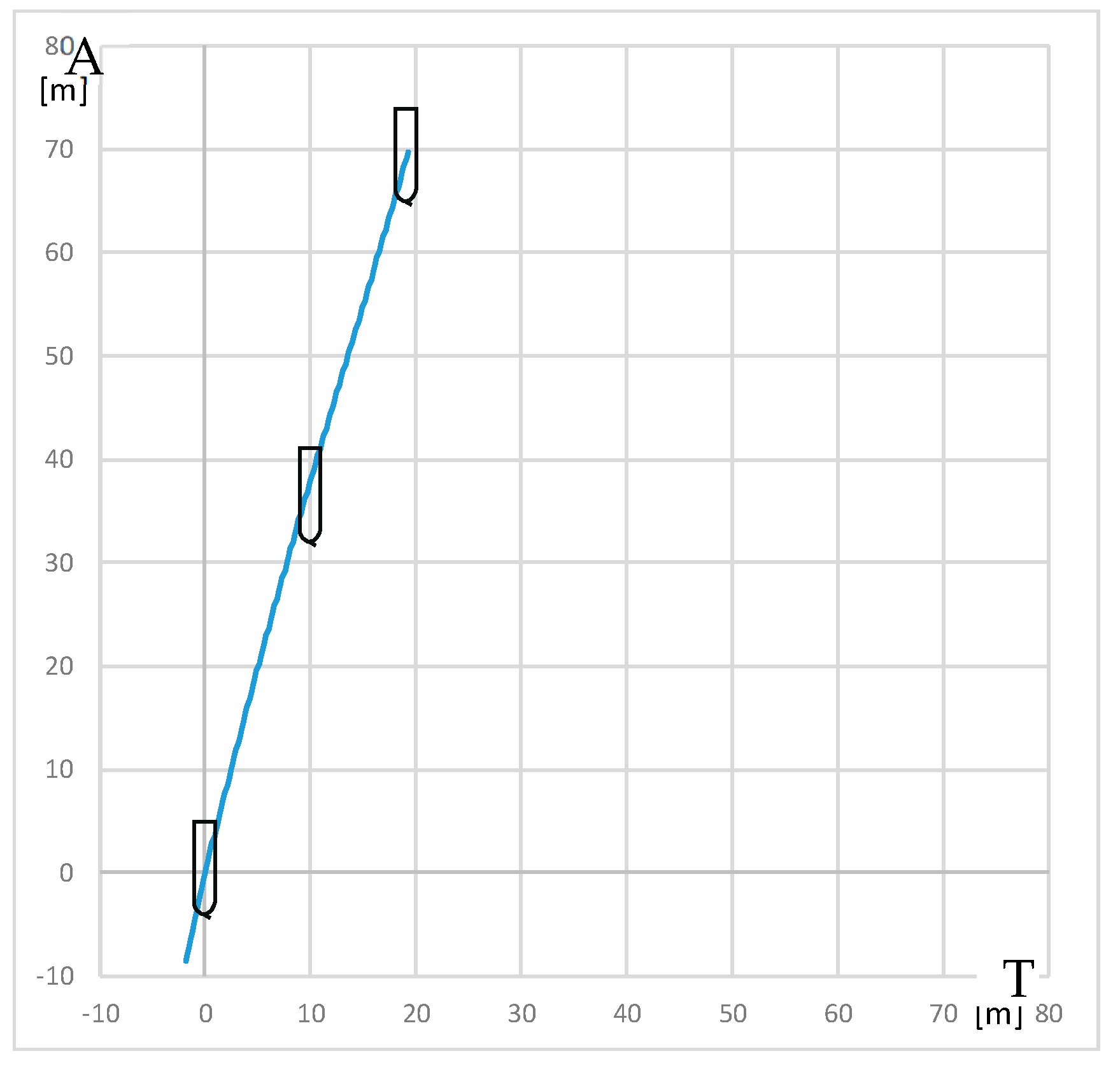
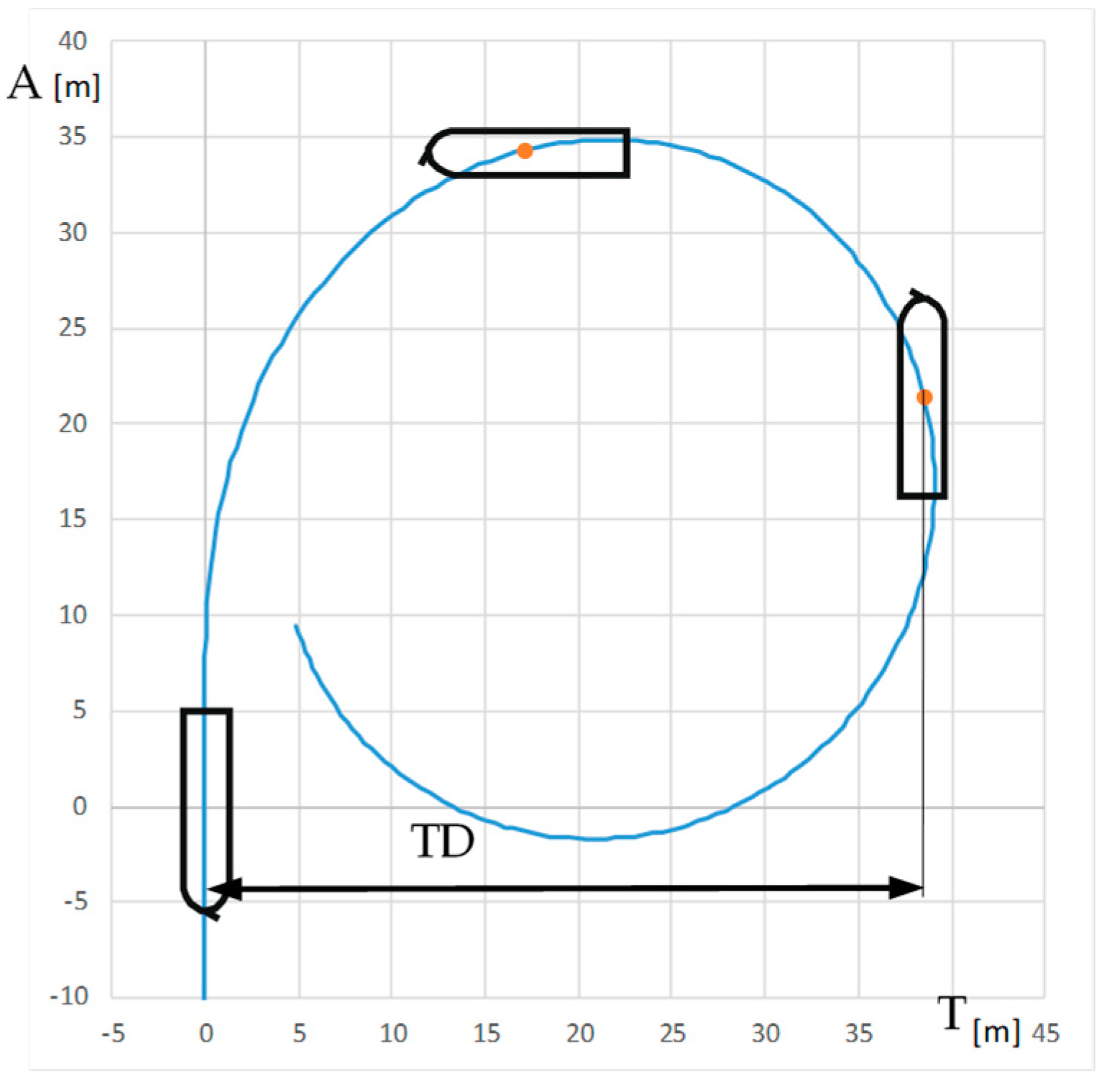
3.3. Turning Circle Trials
4. Discussion
4.1. Comparison of Tactical Diameters Obtained for the Tested Model with RC and Model of a Push Train
4.2. Comparison of the Lift Forces Generated by Bow RC and Stern Rudder
5. Conclusions
- there was no strong influence of free surface and the bow wave on the RC-generated steering force,
- RC vibrations appeared at rotational speeds greater than 400 RPM,
- the RC steering force depends on the drift angle at the bow,
- the lift force generated by the tested RC is of the same magnitude as the lift force of the stern rudder,
- the results of the presented research are comparable to the results obtained from model tests of 1:20 scale push train model, showing the same trend in increased controllability,
- the main problem with the development of the commercial application of the bow steering system is the prediction hydrodynamic force generated by the rotating cylinder in dependence on rotational speed and inflow velocity in operational conditions, necessary to control the steering force.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Abramowicz-Gerigk, T.; Burciu, Z.; Jachowski, J. An innovative steering system for a river push barge operated in environmentally sensitive areas. Pol. Marit. Res. 2017, 24, 27–34. [Google Scholar] [CrossRef]
- Abramowicz-Gerigk, T.; Burciu, Z.; Jachowski, J. Parametric study on the flow field generated by river barge bow steering systems. Sci. J. Marit. Univ. Szczec. 2019, 60, 9–17. [Google Scholar]
- PIANC Report N° 99PIANC, Considerations to Reduce Environmental Impacts of Vessels Navigation 2008, The World Association for Waterborne Transport Infrastructure (PIANC), Inland Navigation Commission. Available online: www.pianc.org (accessed on 10 September 2022).
- Gerigk, M.; Gerigk, M.K. Challenges associated with development of AUV—Unmanned autonomous underwater vehicles to be operated using the AI-based control systems. In Per Mare Ad Astra Space Technology, Governance and Law; Polish Academy of Sciences: Warsaw, Poland, 2021; pp. 33–46. [Google Scholar]
- Gerigk, M.K. An Integrated Model of Motion, Steering, Positioning and Stabilization of an Unmanned Autonomous Maritime Vehicle. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2015, 9, 591–596. [Google Scholar] [CrossRef]
- Lebkowski, A. Design of an Autonomous Transport System for Coastal Areas. Transnav Int. J. Mar. Navig. Saf. Sea Transp. 2018, 12, 117–124. [Google Scholar] [CrossRef]
- Gerigk, M.K.; Skorupski, J. Safety Management of Complex Airborne and Seaborne Technical Objects. Arch. Transp. 2012, 24, 285–296. [Google Scholar]
- Skupien, E. Hydrotechnical Conditions and Inland Transportation’s Costs. Arch. Transp. 2012, 24, 571–578. [Google Scholar] [CrossRef]
- Skupien, E.; Prokopowicz, J. Methods of calculating ship resistance on limited waterways. Pol. Marit. Res. 2014, 4, 2–17. [Google Scholar] [CrossRef]
- Kulczyk, J.; Lisiewicz, T.; Nowakowski, T. New generation of fleet on Odra Waterway. Sci. Pap. Wars. Univ. Technol. 2012, 82, 55–67. Available online: https://docplayer.pl/6056486-Flota-nowej-generacji-na-odrza-skiej-drodze-wodnej.html (accessed on 10 September 2022).
- Abramowicz-Gerigk, T.; Burciu, Z.; Krata, P.; Jachowski, J. Gdynia Maritime University. Steering System for a Waterborne Inland Unit. Patent PL238756, 4 October 2021. [Google Scholar]
- Carstensen, S.; Mandviwalla, X.; Vita, L.; Schmidt, P. Lift of a Rotating Circular Cylinder in Unsteady Flows. J. Ocean Wind Energy 2014, 1, 41–49. Available online: http://www.isope.org/publications (accessed on 10 September 2022).
- Wong, K.W.L.; Zhao, J.; Jacono, D.L.; Thompson, M.C. Experimental investigation of flow-induced vibration of a rotating circular cylinder. J. Fluid Mech. 2017, 829, 486–511. [Google Scholar] [CrossRef]
- Tokumaru, P.T.; Dimotakis, P.E. The lift of a cylinder executing rotary motions in a uniform flow. J. Fluid Mech. 1993, 255, 1–10. [Google Scholar] [CrossRef]
- He, J.W.; Glowinski, R.; Metcalfe, R.; Nordlander, A.; Periaux, J. Active control and drag optimization for flow past a circular cylinder: Oscillatory cylinder rotation. J. Comput. Phys. 2000, 163, 83–117. [Google Scholar] [CrossRef]
- Chen, W.; Rheem, C.-K. Experimental investigation of rotating cylinders in flow. J. Mar. Sci. Technol. 2019, 24, 111–122. [Google Scholar] [CrossRef]
- Zhou, B.; Wang, X.; Guo, W.; Gho, W.M.; Tan, S.K. Experimental study on flow past a circular cylinder with rough surface. Ocean Eng. 2015, 109, 7–13. [Google Scholar] [CrossRef]
- Abramowicz-Gerigk, T.; Burciu, Z.; Jachowski, J.; Kreft, O.; Majewski, D.; Stachurska, B.; Sulisz, W.; Szmytkiewicz, P. Experimental Method for the Measurements and Numerical Investigations of Force Generated on the Rotating Cylinder under Water Flow. Sensors 2021, 21, 2216. [Google Scholar] [CrossRef] [PubMed]
- Badr, H.M.; Coutanceau, M.; Dennis, S.C.R.; Ménard, C. Unsteady flow past a rotating circular cylinder at Reynolds numbers 103 and 104. J. Fluid Mech. 1990, 220, 459–484. [Google Scholar] [CrossRef]
- Karabelas, S.J.; Koumroglou, B.C.; Argyropoulos, C.D.; Markatos, N.C. High Reynolds number turbulent flow past a rotating cylinder. Appl. Math. Model. 2012, 36, 379–398. [Google Scholar] [CrossRef]
- Wang, W.; Wang, Y.; Zhao, D.; Pang, Y.; Guo, C.; Wang, Y. Numerical and Experimental Analysis of the Hydrodynamic Performance of a Three-Dimensional Finite-Length Rotating Cylinder. J. Mar. Sci. Appl. 2020, 19, 388–397. [Google Scholar] [CrossRef]
- Liu, J.; Hekkenberg, R.; Rotteveel, E.A. Proposal for Standard Manoeuvres and Parameters for the Evaluation of Inland Ship Manoeuvrability, European Inland Waterway Navigation Conference 2014, Budapest, Hungary. Available online: https://repository.tudelft.nl/islandora/object/uuid%3A41d55ad7-b6d1-45db-a6af-64f12efa045d (accessed on 10 September 2022).
- King, K.K.; Yasukawa, H.; Hirata, N.; Kose, K. Manoeuvring simulations of pusher-barge systems. J. Mar. Sci. Technol. 2008, 13, 117–126. [Google Scholar] [CrossRef]
- Thouault, N.; Breitsamter c Adams, N.; Seifert, J.; Badalamenti, C.; Prince, S.A. Numerical Analysis of a Rotating Cylinder with Spanwise Disks. AIAA J. 2012, 50, 271–283. [Google Scholar] [CrossRef]
- Hawkswood, M.G.; Lafeber, F.H.; Hawkswood, G.M. Berth Scour Protection for Modern Vessels. PIANC World Congress San Francisco USA, 2014. Available online: https://proserveltd.co.uk/wp-content/uploads/2020/08/2014-Paper-Berth-Scour-Protection-for-Modern-Vessels.pdf (accessed on 10 September 2022).
- Sutulo, S.; Guedes Soares, C. Review on Ship Maneuverability Criteria and Standards. J. Mar. Sci. Eng. 2021, 9, 904. [Google Scholar] [CrossRef]
- Zhao, X.; He, Y.; Huang, L.; Mou, J.; Zhang, K.; Liu, X. Intelligent Collision Avoidance Method for Ships Based on COLRGEs and Improved Velocity Obstacle Algorithm. Appl. Sci. 2022, 12, 8926. [Google Scholar] [CrossRef]
- Lebkowski, A.; Wnorowski, J. A Comparative Analysis of Energy Consumption by Conventional and Anchor Based Dynamic Positioning of Ship. Energies 2021, 14, 524. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| A (m) | advance |
| AR (m2) | rudder area |
| B (m) | breadth |
| BB (m) | breadth of the bow |
| CLR | lift coefficient of rudder |
| CLRC | lift coefficient of rotating cylinder |
| c | propeller type coefficient |
| D (m) | cylinder diameter |
| d (m) | cylinder screen diameter |
| DP (m) | propeller diameter. |
| f | ratio of engine power used |
| H (m) | height of rotating cylinder |
| vR (m/s) | rotor generated flow velocity |
| l (m) | distances from the rotor in forward direction |
| LOA (m) | length over all |
| LB (m) | length of the bow |
| NRC (W) | rotating cylinder drive power |
| P (W) | engine power |
| r (rad/s) | rotational speed |
| Re | Reynolds number |
| TB (m) | draft of the bow |
| TD (m) | tactical diameter |
| U0 (m/s) | efflux velocity |
| v (m/s) | inflow velocity |
| YR (N) | rudder generated lift force |
| YRC (N) | rotor generated lift force |
| α | rotation rate |
| ΔAreal scale (m) | change in advance due to RC operation |
| δ | difference between turning circle trial parameters |
| ν (m2/s) | kinematic viscosity |
| ρ (kg/m3) | water density |
| Parameter | Ship | Model |
|---|---|---|
| LOA (m) | 292.90 | 12.20 |
| B (m) | 48.00 | 2.00 |
| T (m) | 15.33 | 0.64 |
| Bow parameter | Value |
|---|---|
| LB (m) | 2.20 |
| BB (m) | 2.00 |
| TB (m) | 0.64 |
| Parameter | RC1 | RC2 |
|---|---|---|
| H (m) | 0.60 | 0.60 |
| D (m) | 0.22 | 0.11 |
| d (m) | 0.30 | 0.19 |
| r (RPM) | 0–570 | 0–570 |
| NRC (W) | 1000 | 1000 |
| Bollard-Pull vR Measurement | Full Ahead | Half Ahead Turning Circle | |||||
|---|---|---|---|---|---|---|---|
| Turning Circle | Steady Course | ||||||
| l (m) | RC1 RPM | Ruder Angle | RC2 RPM | Ruder Angle | RC2 RPM | Ruder Angle | RC2 RPM |
| 1 | 0–570 | 35° | 0 | 8°–10° | 300 | 35° | 0 |
| 20° | 0 | 20° | 0 | ||||
| 0.5 | 10° | 0 | 10° | 0 | |||
| 0° | 300 | 0° | 300 | ||||
| 0.32 | 35° | 300 | 35° | 300 | |||
| 20° | 300 | 20° | 300 | ||||
| 10° | 300 | 10° | 300 | ||||
| l (m) | vR (m/s) |
|---|---|
| 1 | 0.080 |
| 0.5 | 0.094 |
| 0.32 | 0.990 |
| Ruder Angle | RC2 RPM | Full Ahead | Half Ahead | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Turning Circle | A | T | TD | Turning Circle | A | T | TD | ||
| 35° | 0 |  | 34 | 17 | 38 |  | 31 | 12 | 30 |
| 20° | 0 |  | 48 | 23 | 52 |  | 48 | 19 | 47 |
| 10° | 0 |  | 58 | 30 | 68 |  | 51 | 30 | 66 |
| 0° | 300 |  | 44 | 26 | 55 |  | 27 | 21 | 46 |
| 35° | 300 |  | 25 | 13 | 31 |  | 25 | 13 | 30 |
| 20° | 300 |  | 27 | 15 | 34 |  | 25 | 14 | 32 |
| 10° | 300 |  | 32 | 17 | 38 |  | 26 | 19 | 40 |
| Rudder Angle | δ (%) | |||||
|---|---|---|---|---|---|---|
| Full Ahead | Half Ahead | |||||
| A | T | TD | A | T | TD | |
| 35° | 26 | 24 | 18 | 19 | −8 | 0 |
| 20° | 44 | 35 | 35 | 48 | 26 | 32 |
| 10° | 45 | 43 | 44 | 49 | 37 | 39 |
| Rudder Angle | Full Ahead | Half Ahead | ||
|---|---|---|---|---|
| A/L | ΔA/L | A/L | ΔA/L | |
| 35° | 2.4 | 0.6 | 1.7 | 0.3 |
| 20° | 3.3 | 1.5 | 1.9 | 0.9 |
| 10° | 4.0 | 1.8 | 2.2 | 1.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abramowicz-Gerigk, T.; Burciu, Z. Investigations of Hydrodynamic Force Generated on the Rotating Cylinder Implemented as a Bow Rudder on a Large-Scale Ship Model. Sensors 2022, 22, 9137. https://doi.org/10.3390/s22239137
Abramowicz-Gerigk T, Burciu Z. Investigations of Hydrodynamic Force Generated on the Rotating Cylinder Implemented as a Bow Rudder on a Large-Scale Ship Model. Sensors. 2022; 22(23):9137. https://doi.org/10.3390/s22239137
Chicago/Turabian StyleAbramowicz-Gerigk, Teresa, and Zbigniew Burciu. 2022. "Investigations of Hydrodynamic Force Generated on the Rotating Cylinder Implemented as a Bow Rudder on a Large-Scale Ship Model" Sensors 22, no. 23: 9137. https://doi.org/10.3390/s22239137
APA StyleAbramowicz-Gerigk, T., & Burciu, Z. (2022). Investigations of Hydrodynamic Force Generated on the Rotating Cylinder Implemented as a Bow Rudder on a Large-Scale Ship Model. Sensors, 22(23), 9137. https://doi.org/10.3390/s22239137