
Virtual Traffic Light Implementation on a Roadside Unit over 802.11p Wireless Access in Vehicular Environments



Abstract
1. Introduction
1.1. Motivation and Research Gap
1.2. Contributions
- Demonstrates the operability of RSU communication over 802.11p through the use of software defined radios.
- Adapts a virtual traffic light algorithm to offload computations from vehicles to an RSU using 802.11p.
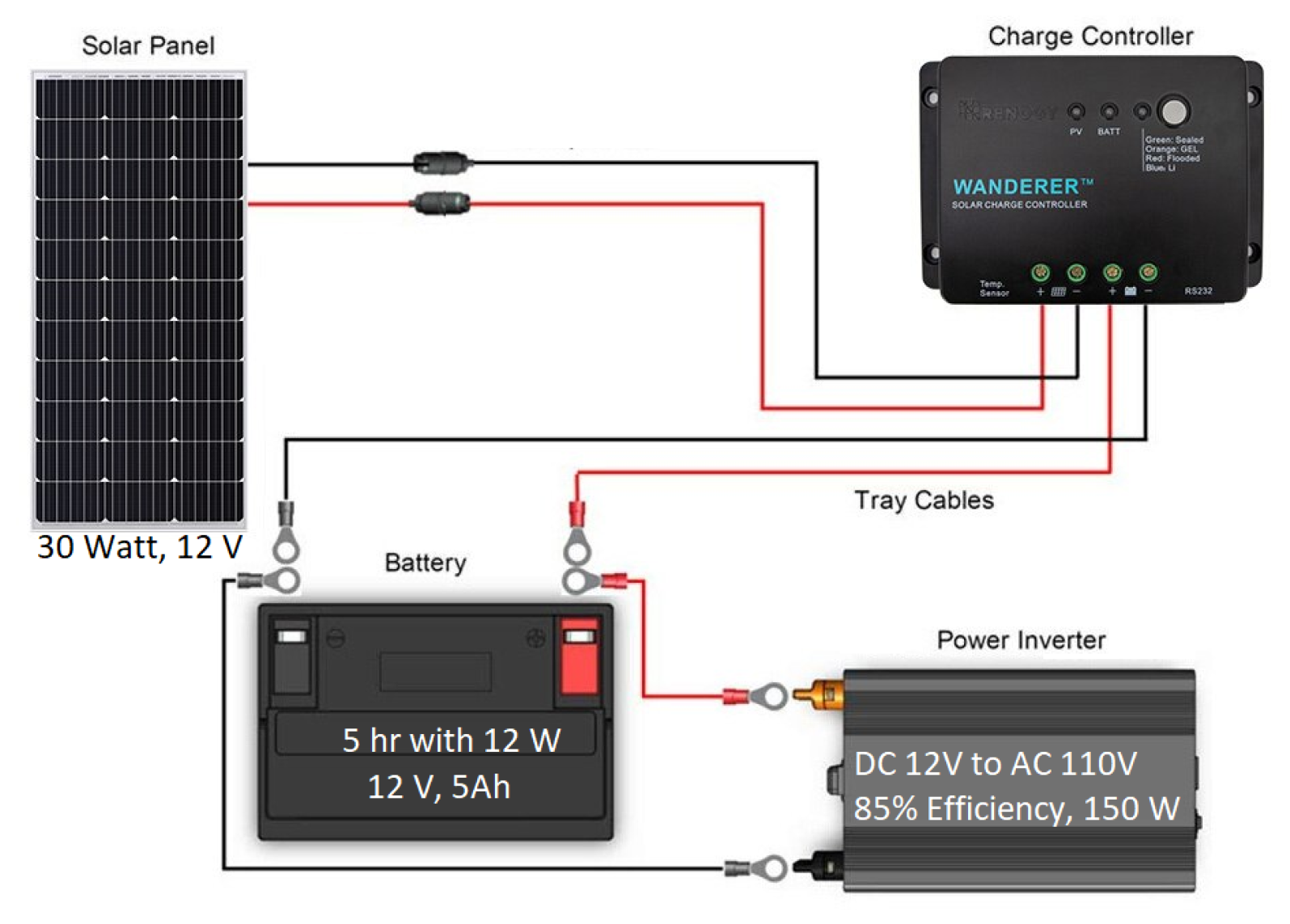
- Presents and discusses the requirements for a remote, standalone, off-grid solar powered system to power lightweight RSUs, supported by power analysis and measurements.
2. Background
2.1. The Internet of Vehicles
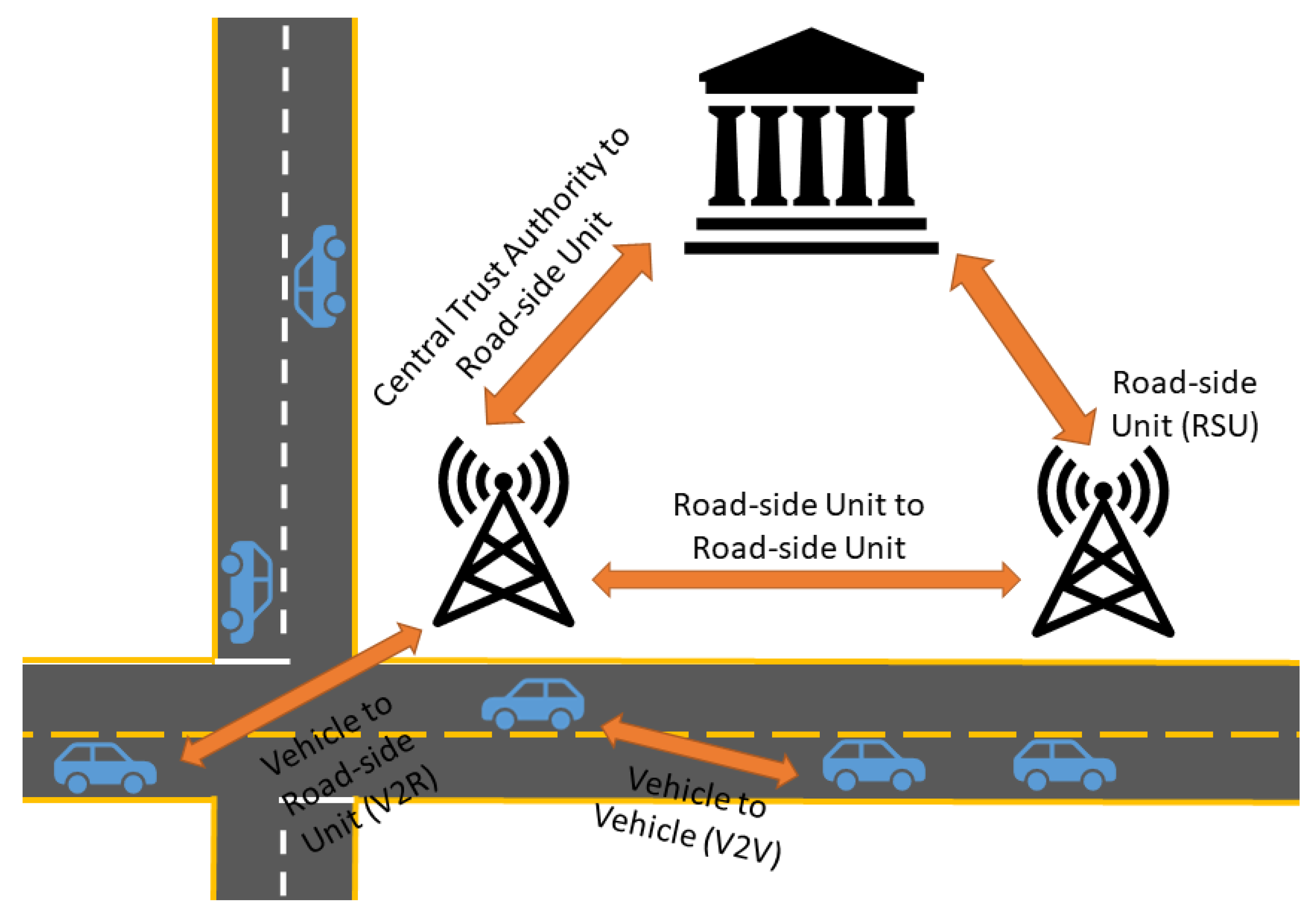
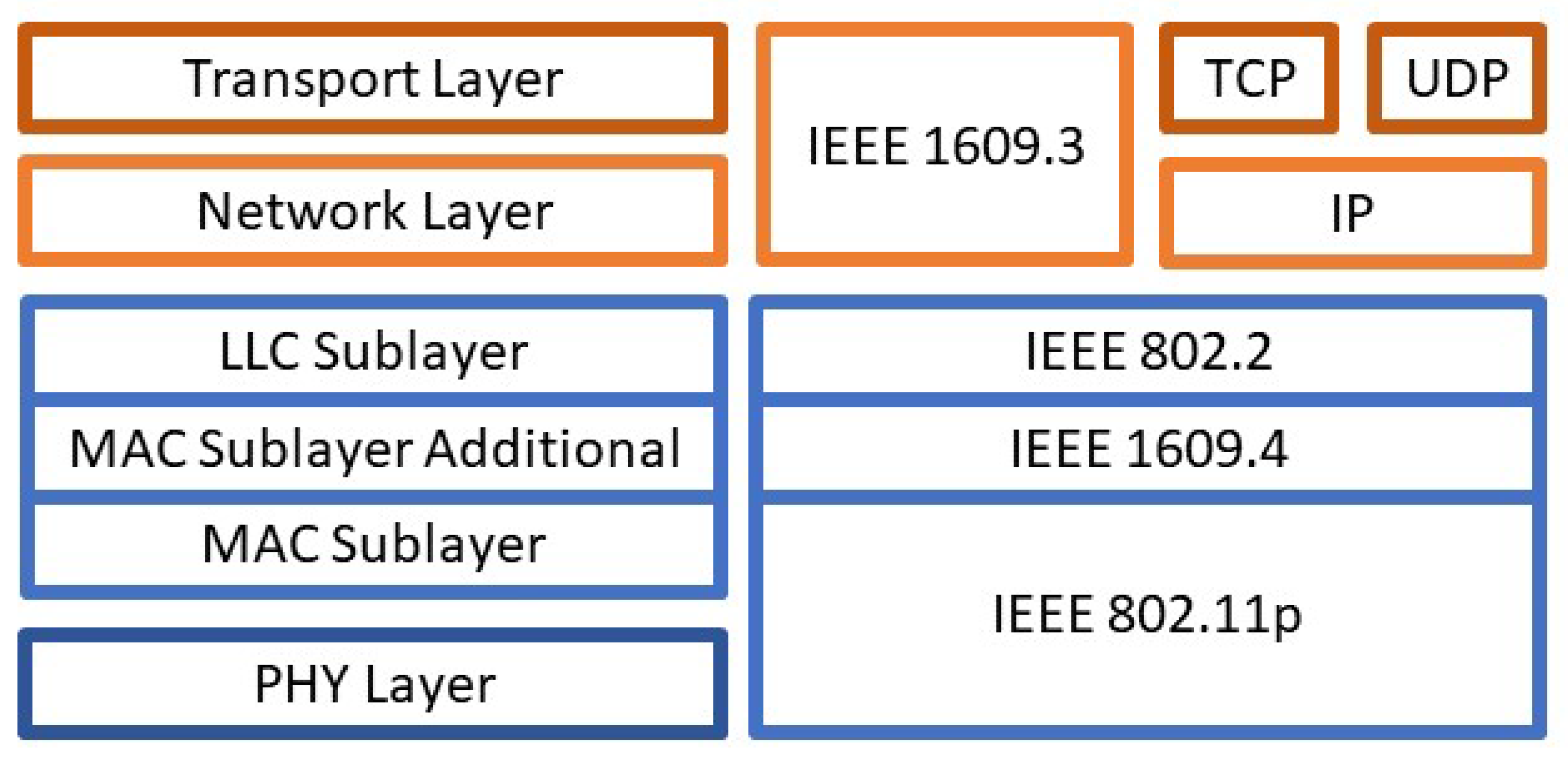
2.2. Vehicular Communication
2.3. Virtual Traffic Lights
2.4. Roadside Units (RSUs)
3. Methodology
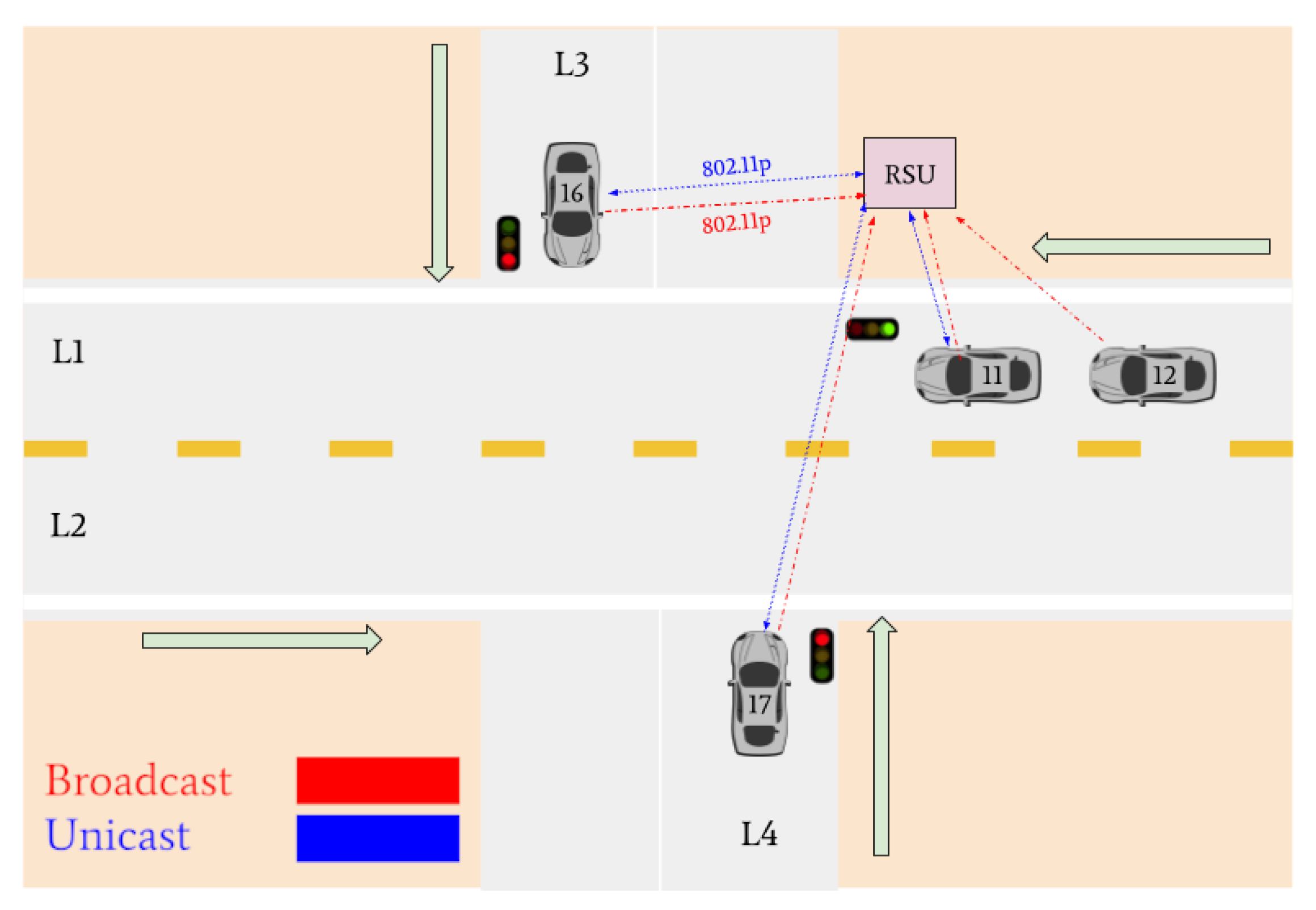
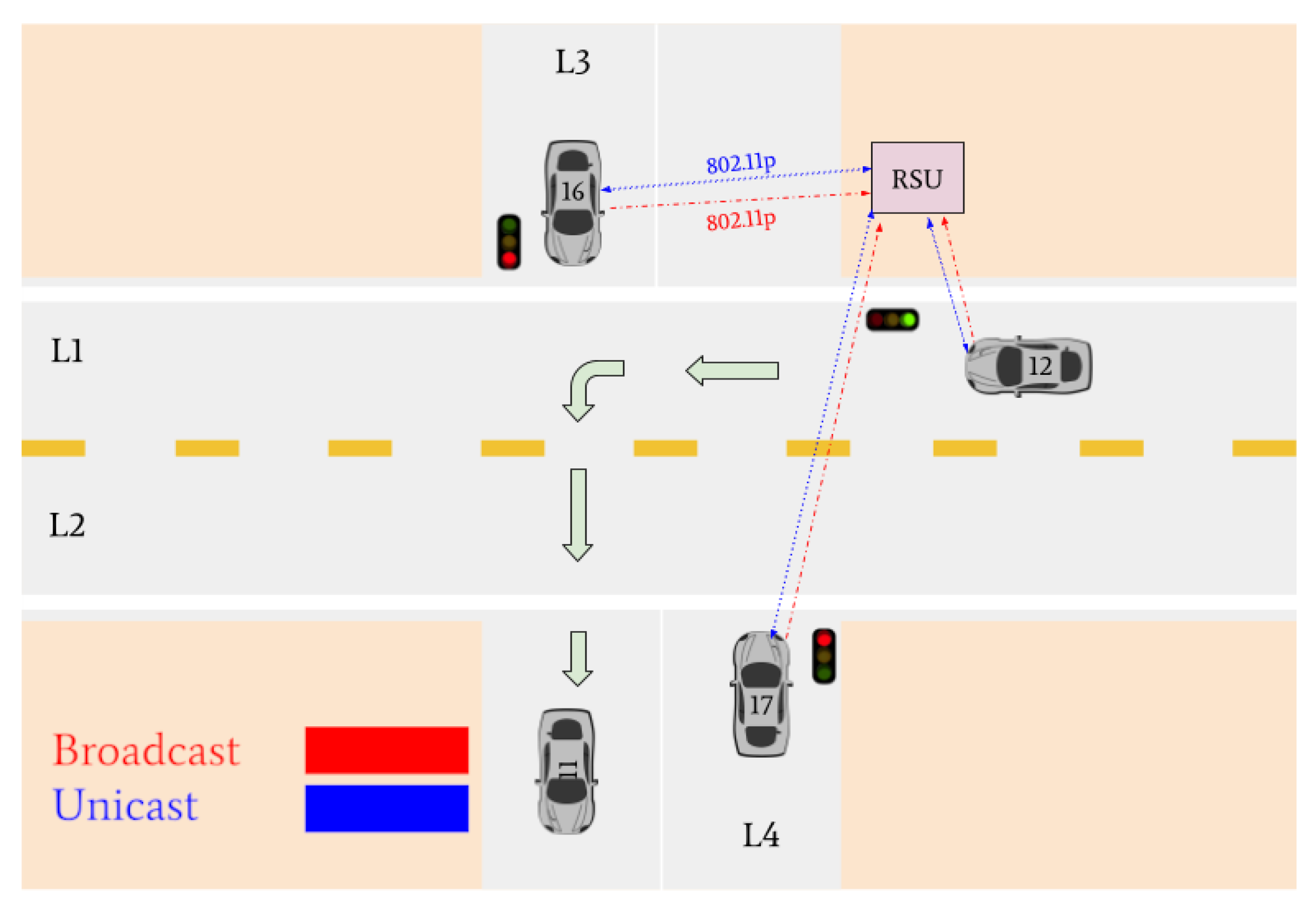
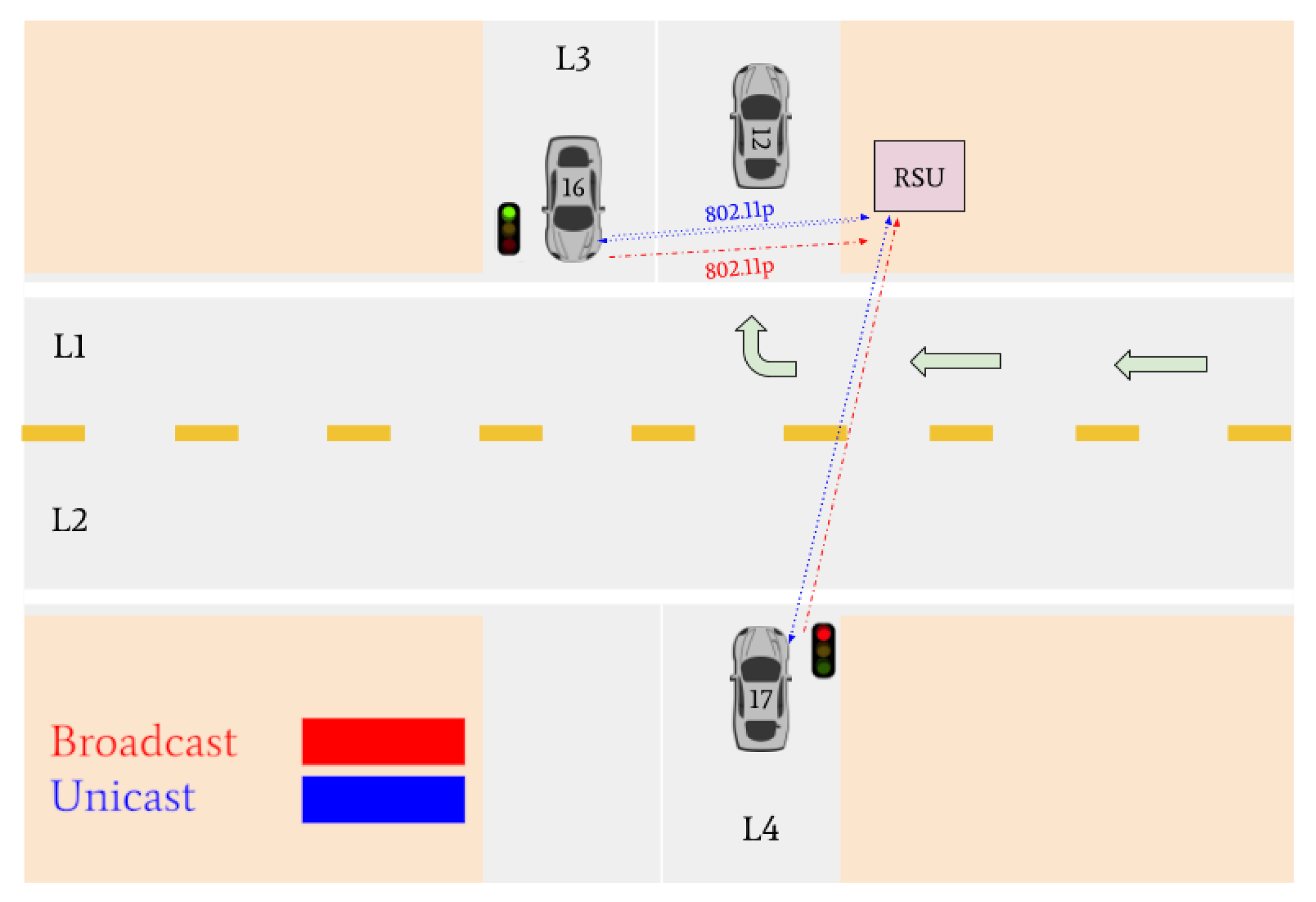
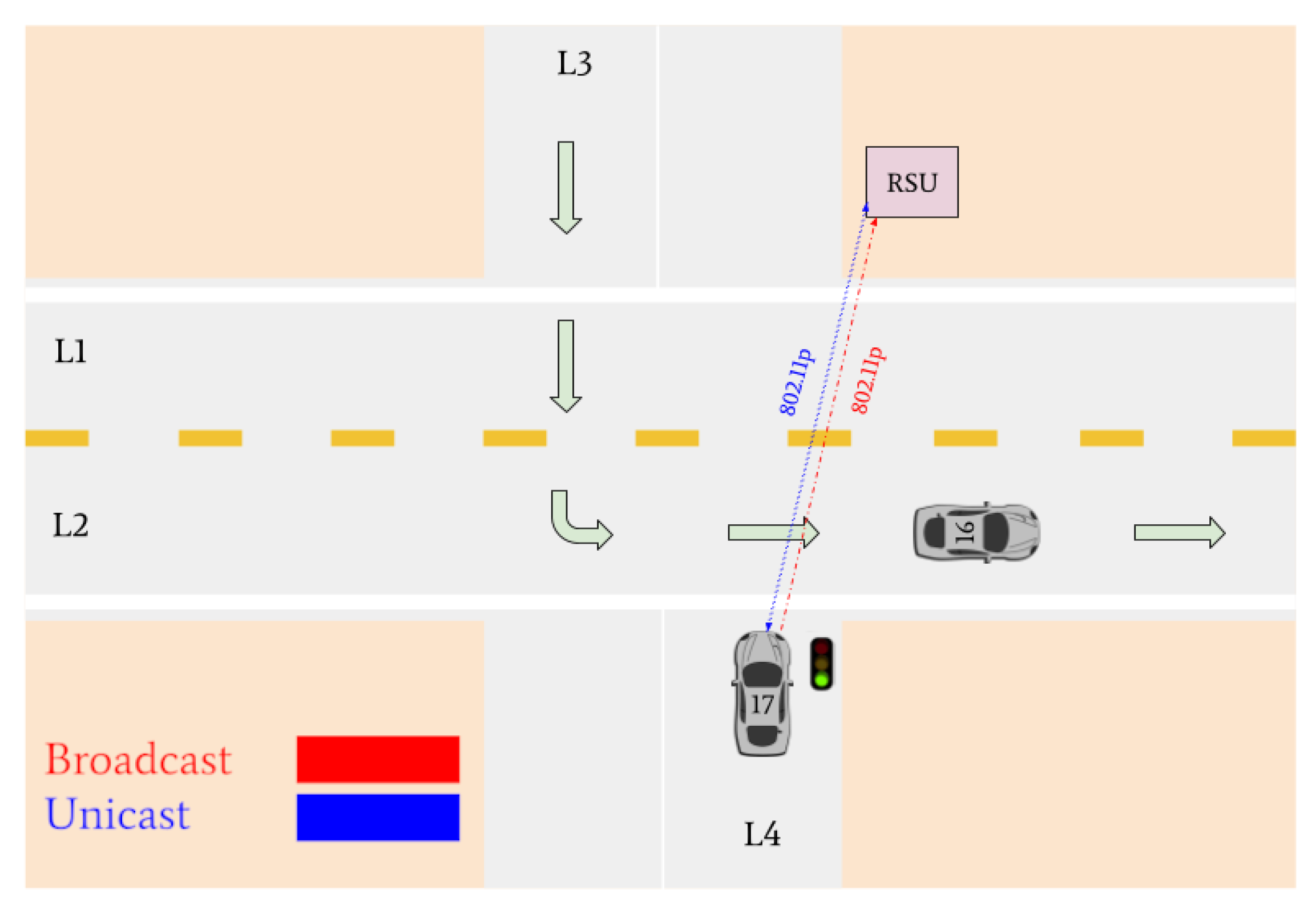
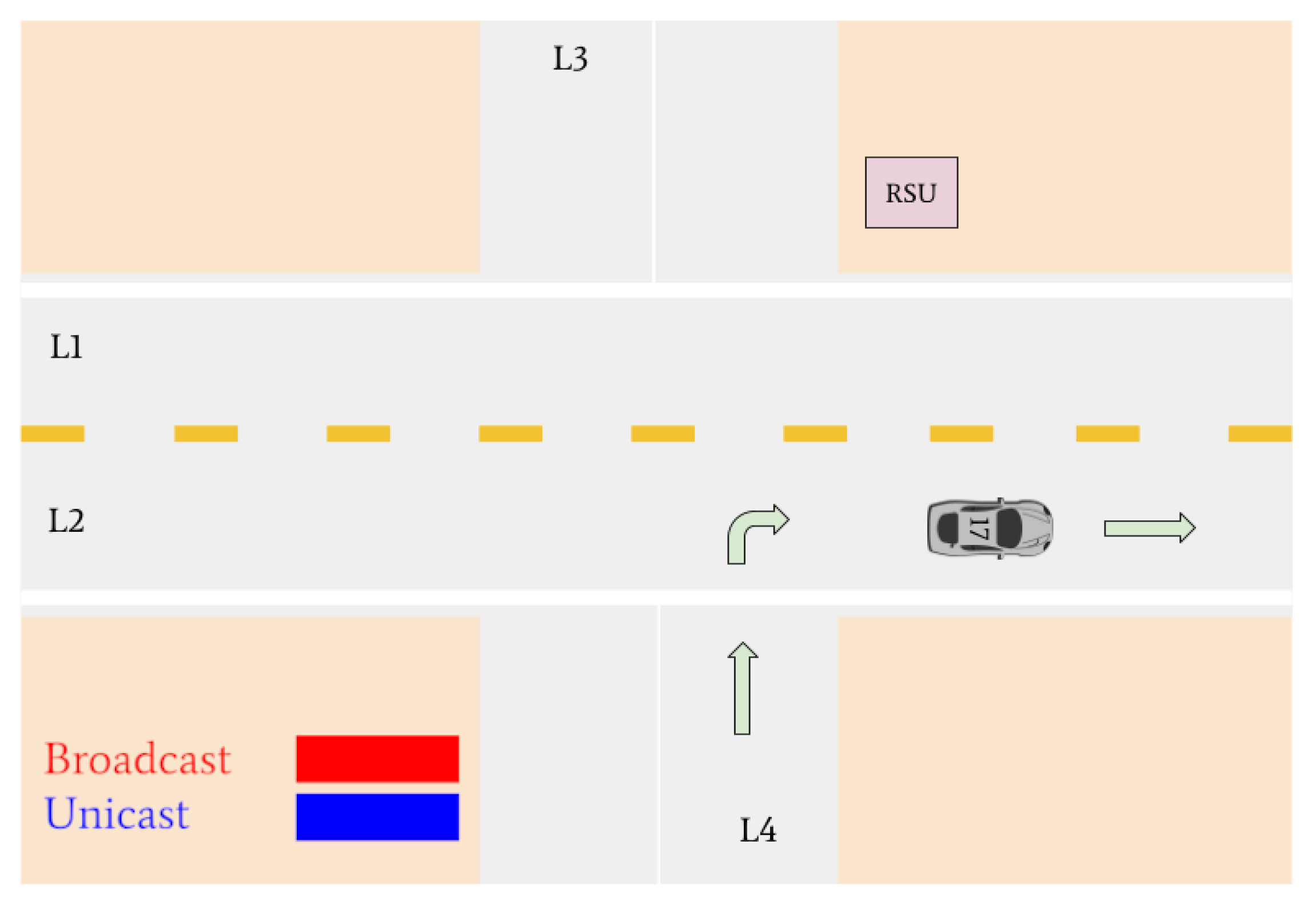
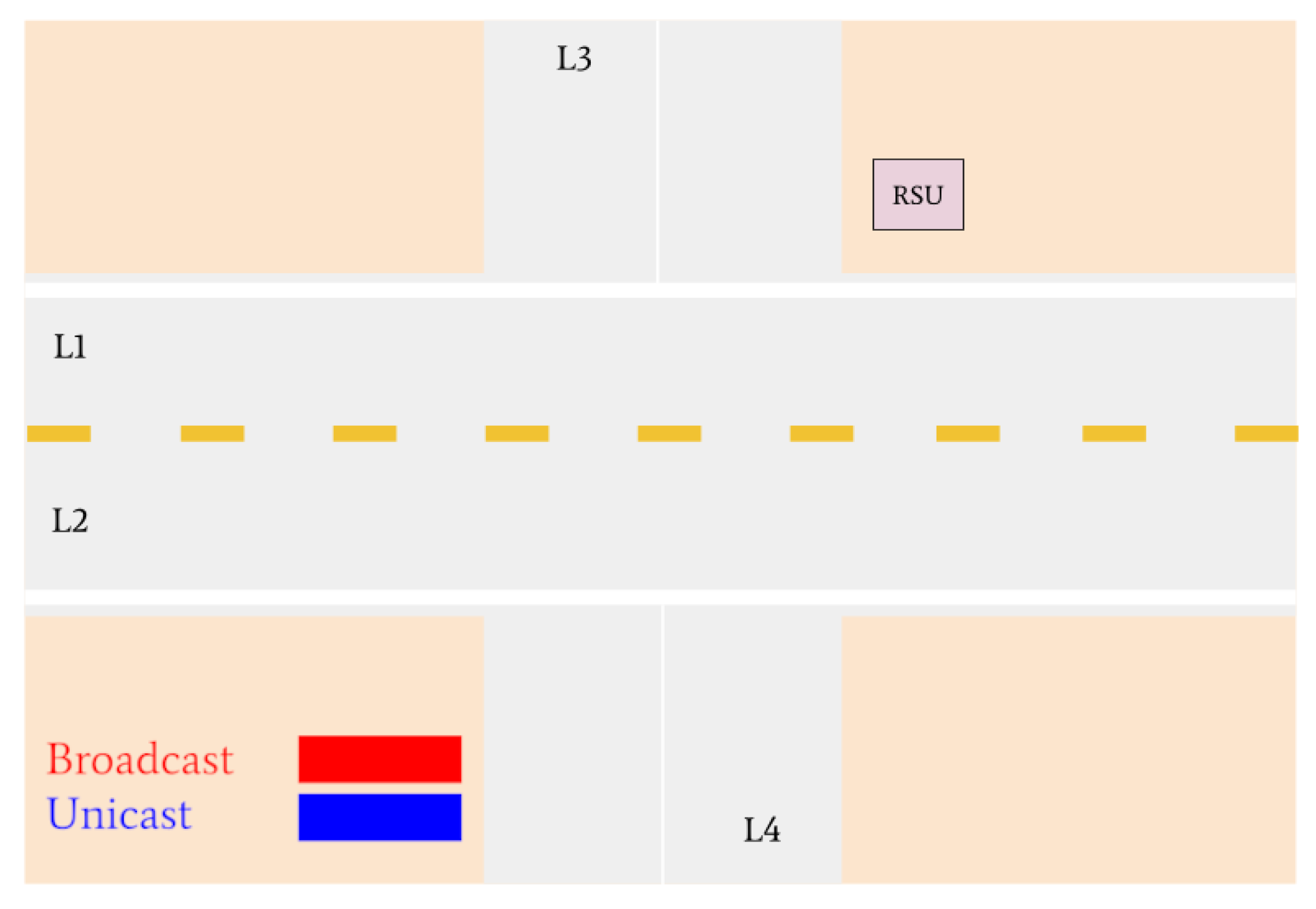
3.1. Traffic Scenario
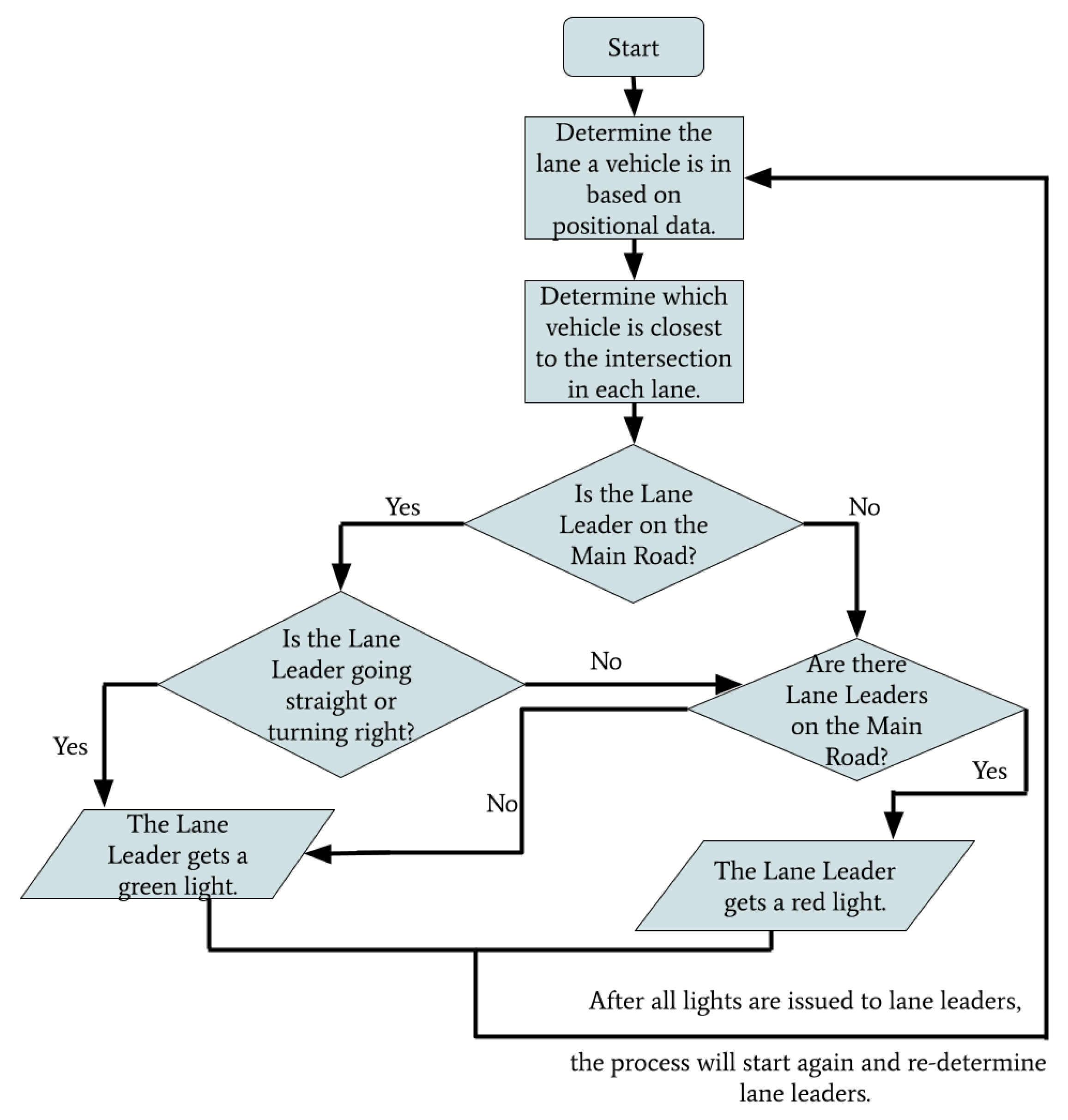
3.2. RSU Intersection Management
3.3. RSU-Based Virtual Intersection Management Algorithm
| Algorithm 1 RSU Traffic Management. |
Input: L1L, L2L, L3L, L4L Output: Green Light and Red Light Unicast messages for each Lane Leader function
Manage-Traffic if and go forward or turn right then and get a green light and get a red light else if and turn left then if then gets a green light gets a red light else gets a red light gets a green light end if and get a red light else if turns left and goes forward or turns right then gets a red light gets a green light and get red lights else if turns left and goes forward or turns right then L1L gets a green light L2L gets a red light L3L and L4L get red lights else if only or is in the intersection then or gets a green light and get a red light else if only is in the intersection then gets a green light else if only is in the intersection then gets a green light else if and either go forward or turn right then and get a green light else if goes forward or turns right and turns left then if then gets a green light gets a red light else gets a red light gets a green light end if else if goes forward or turns right and turns left then if then gets a green light gets a red light else gets a red light gets a green light end if else if and turn left then if then gets a green light gets a red light else gets a red light gets a green light end if else Do Nothing end if end function |
3.4. Algorithmic Overhead
4. Experimentation
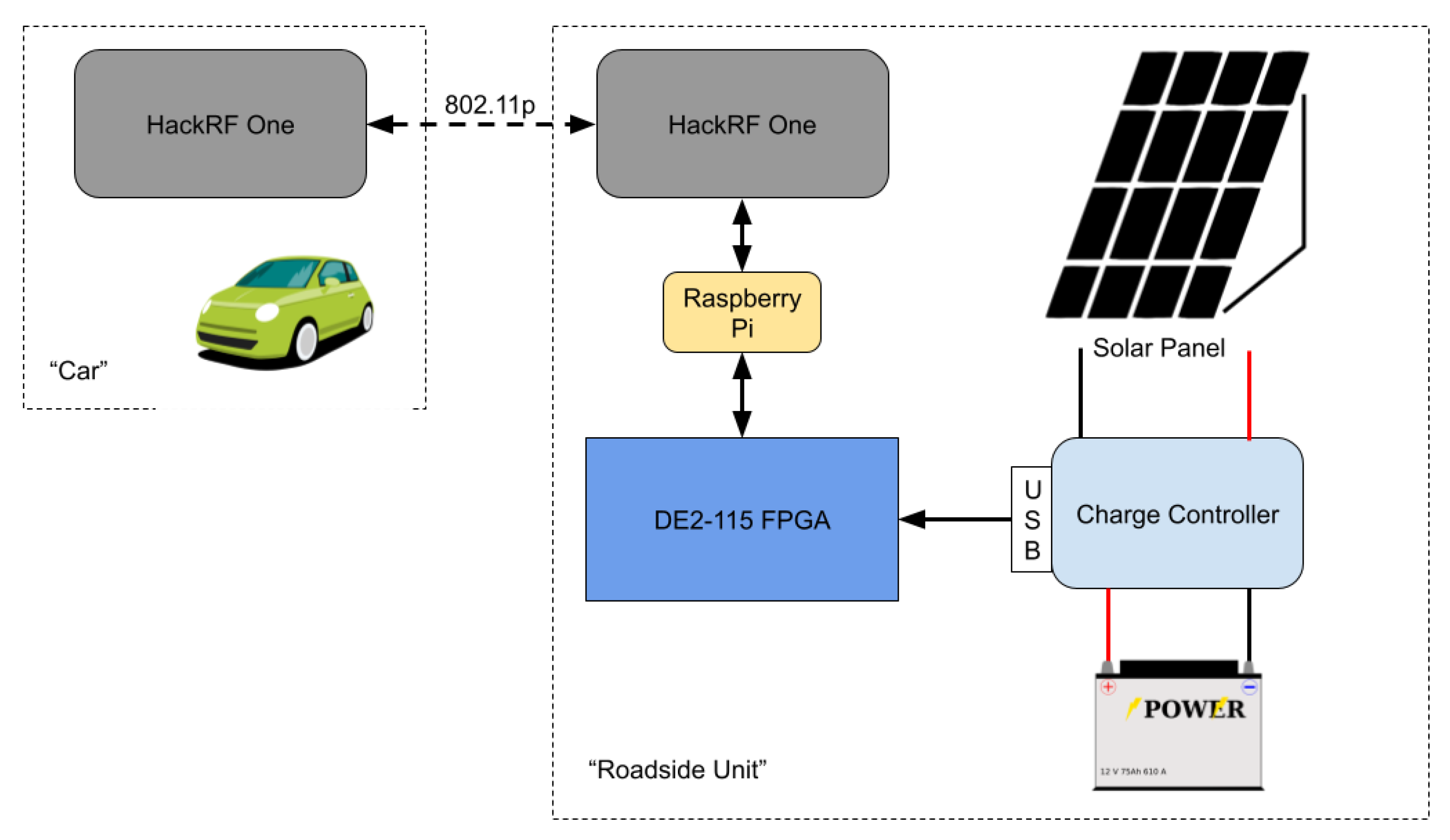
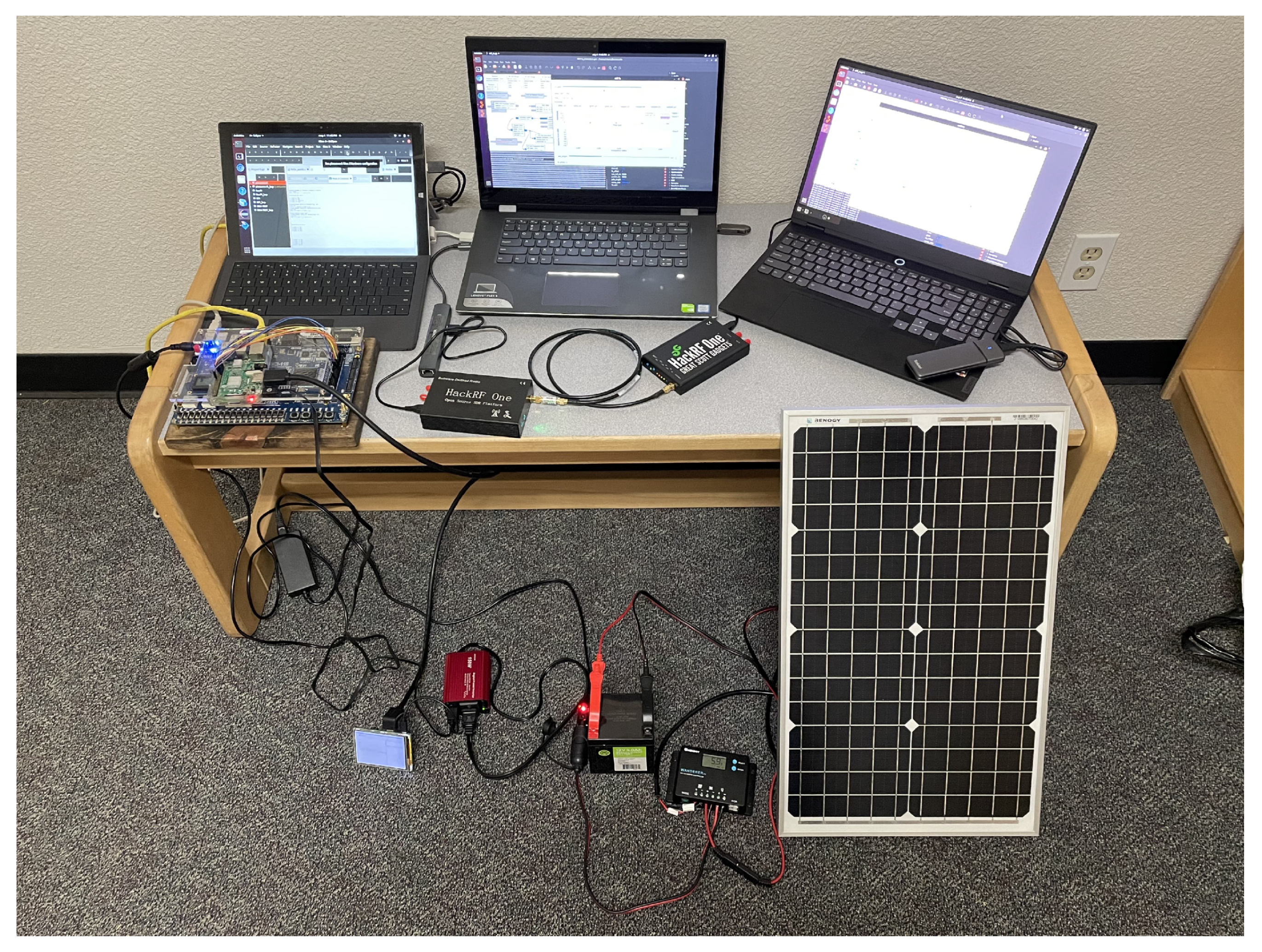
4.1. System Overview
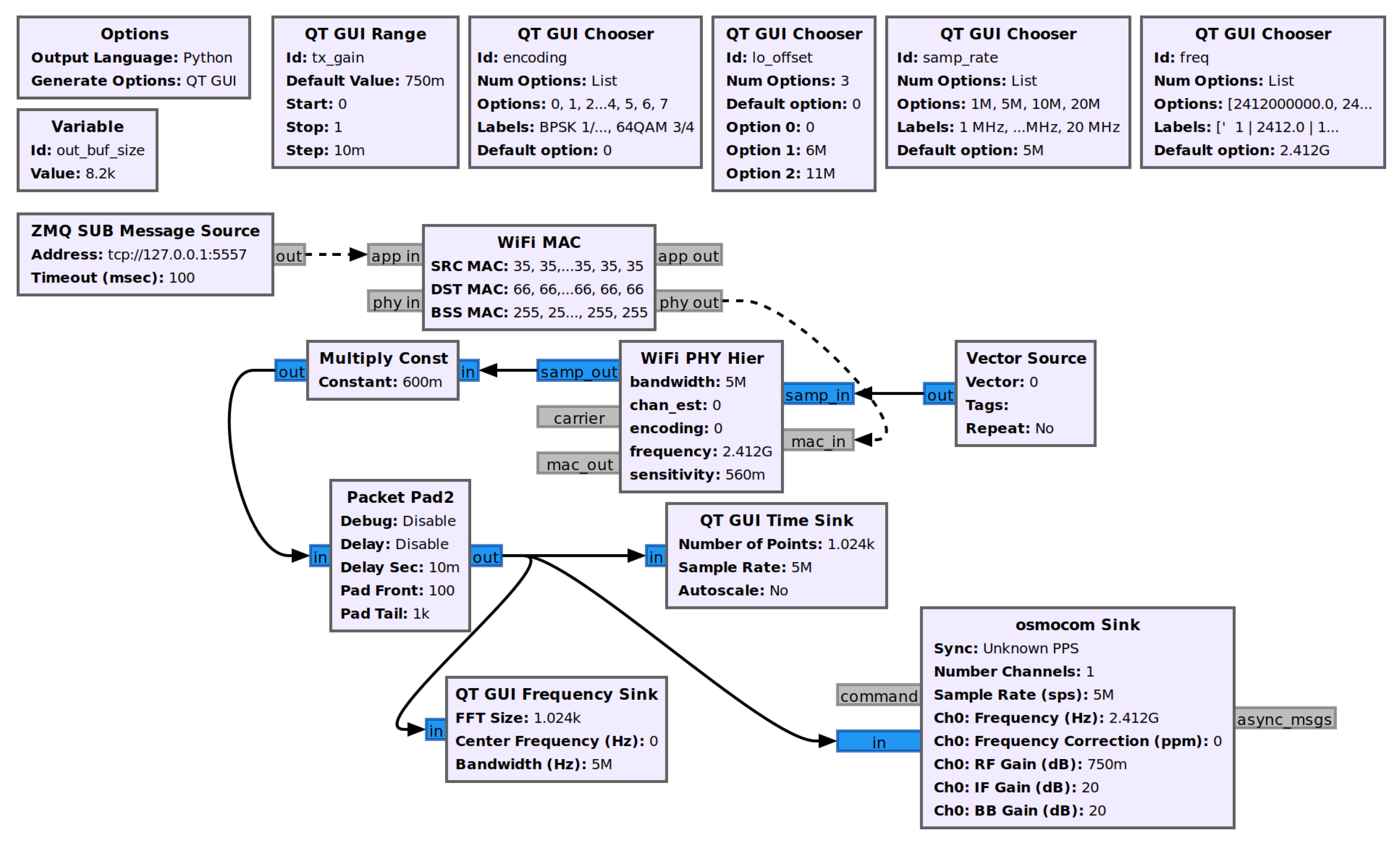
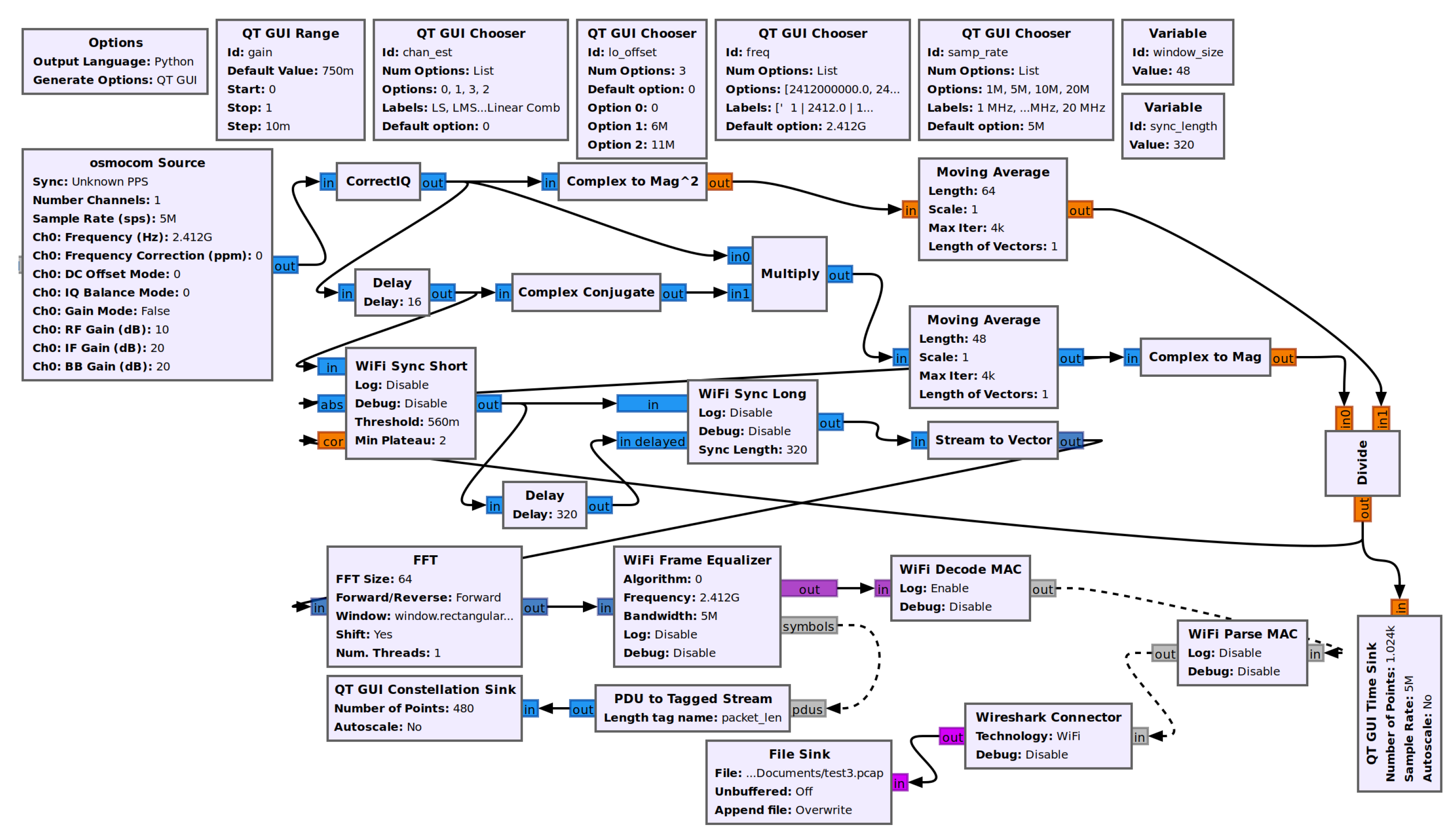
4.1.1. Communication Module
4.1.2. Cloud Server
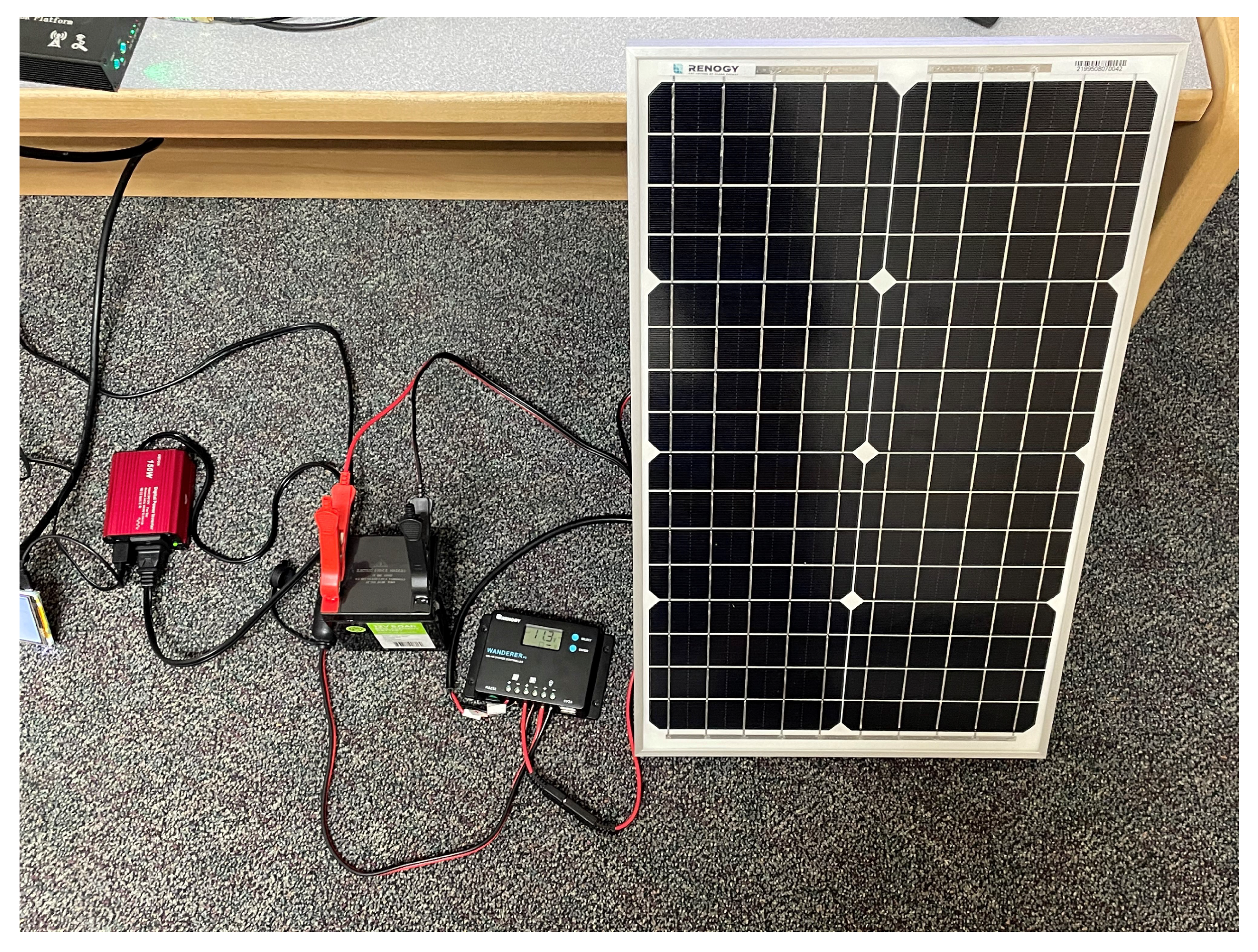
4.1.3. Power System
5. Results
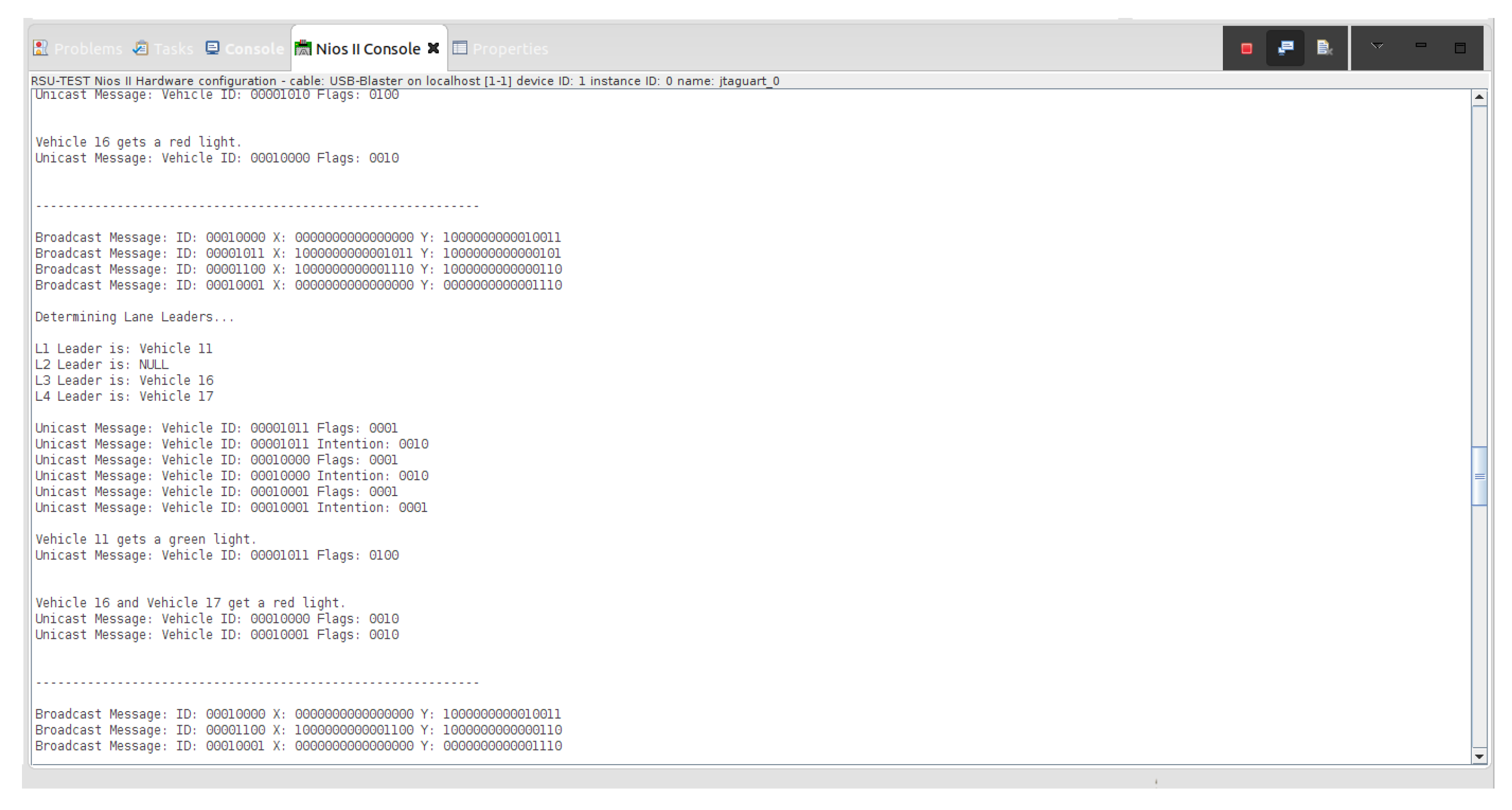
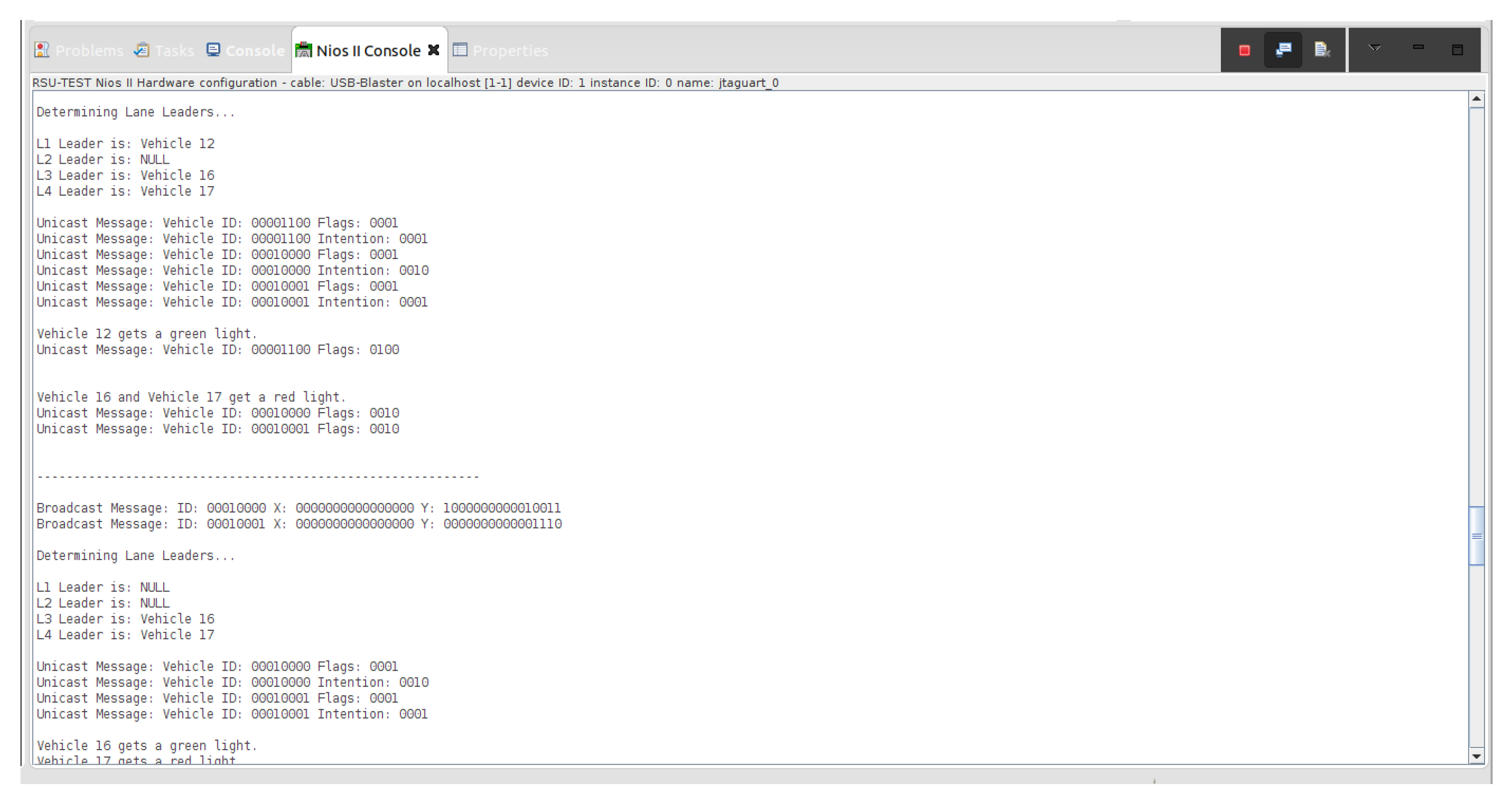
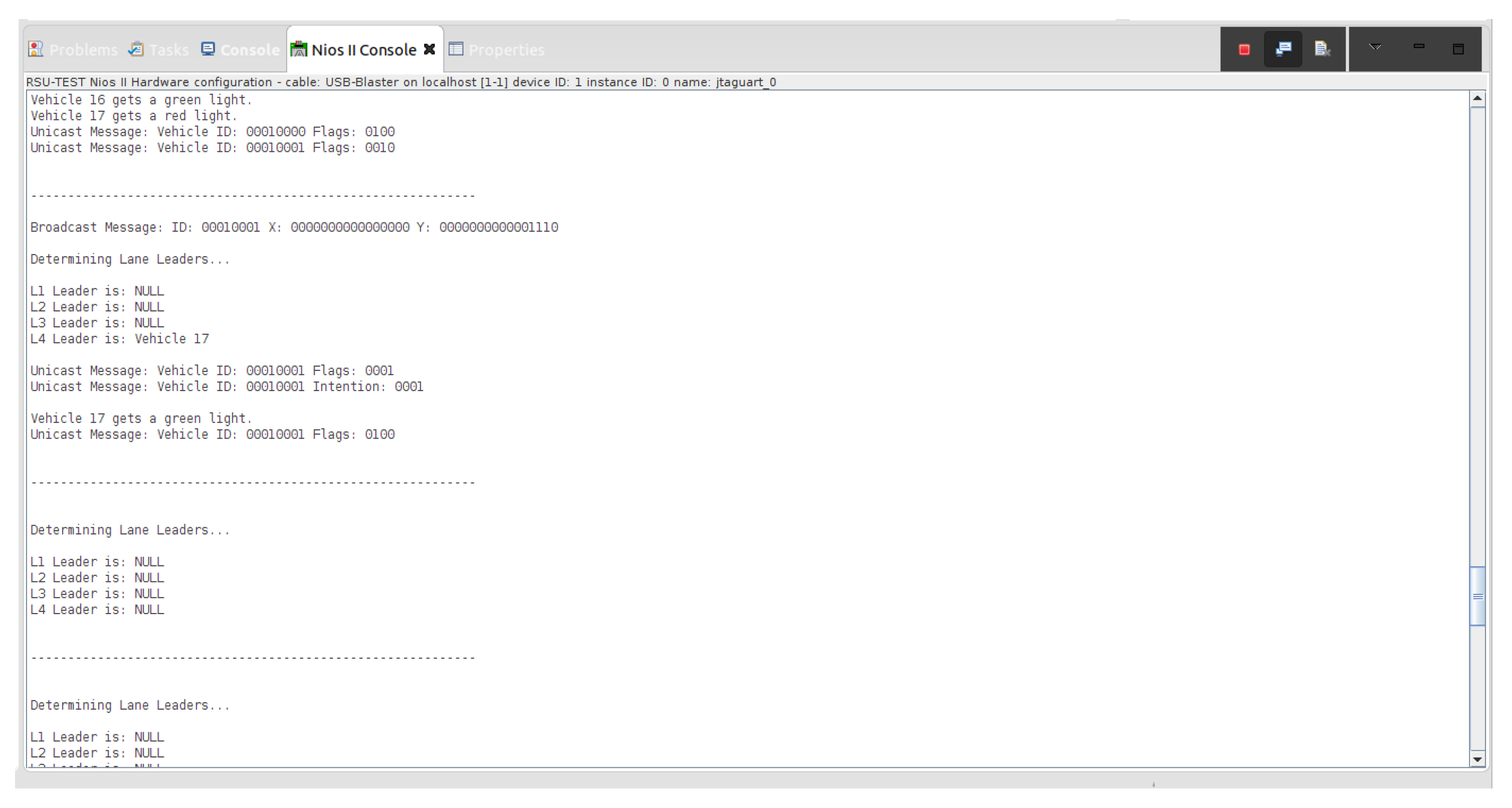
5.1. Traffic Management
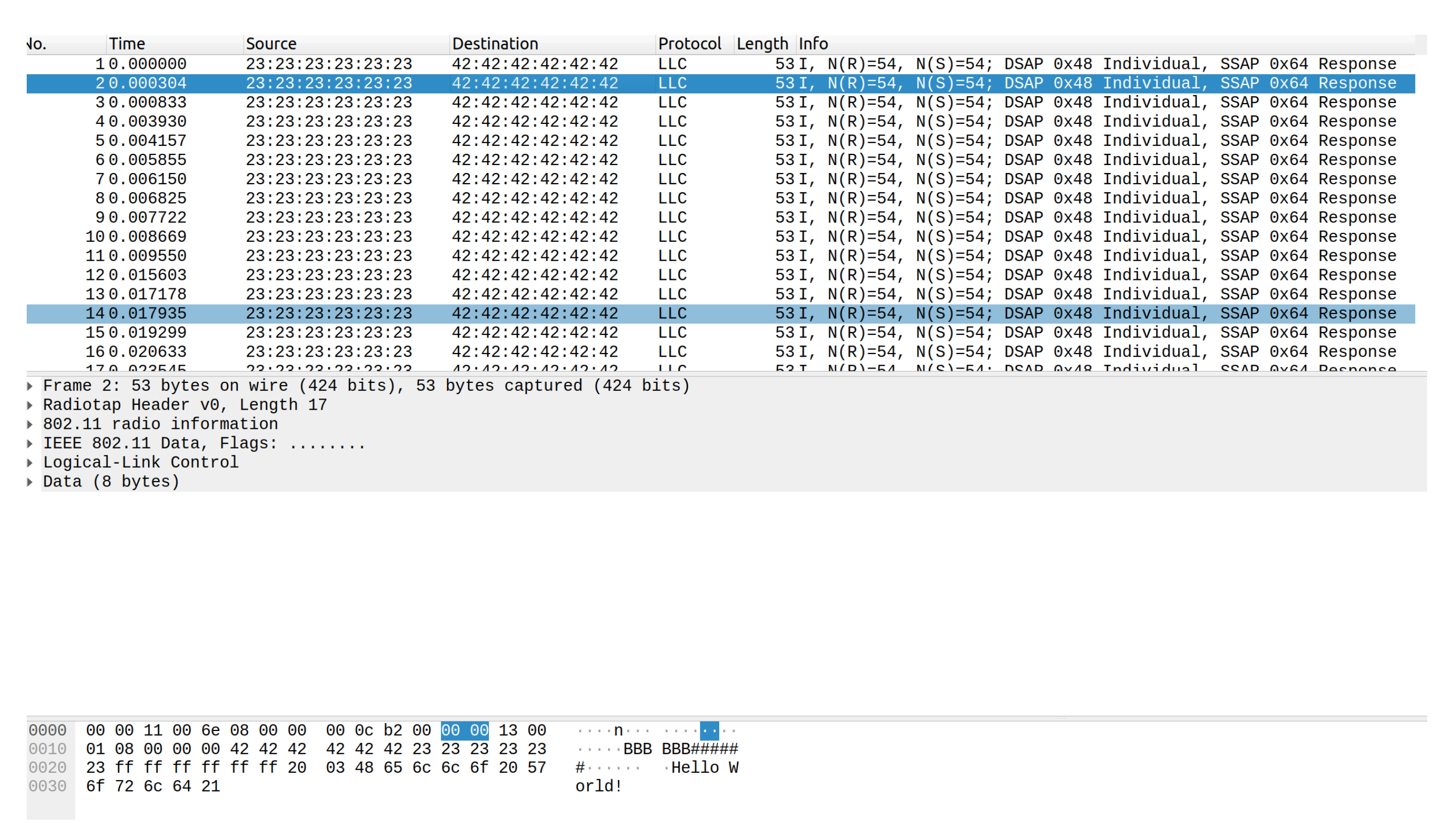
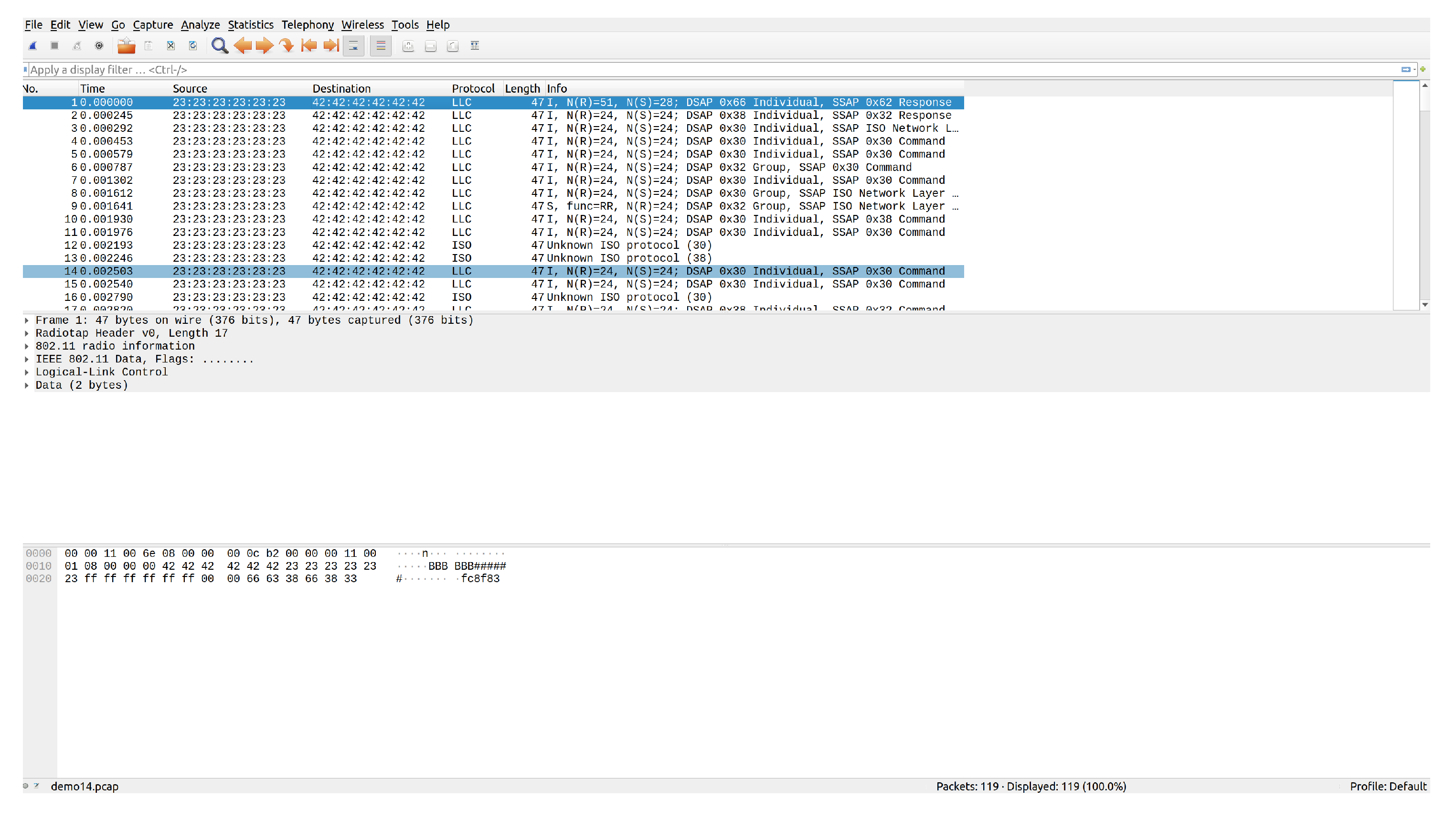
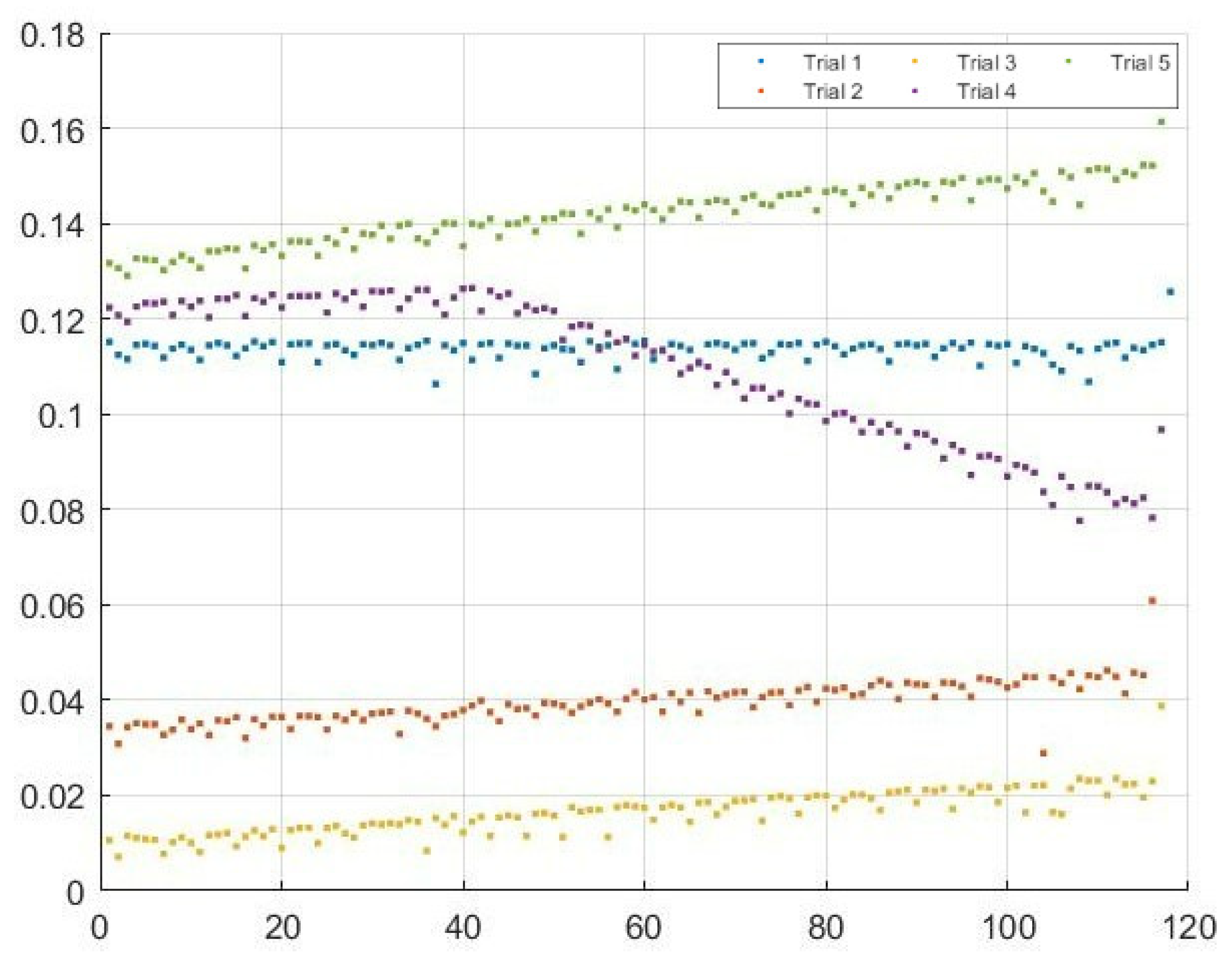
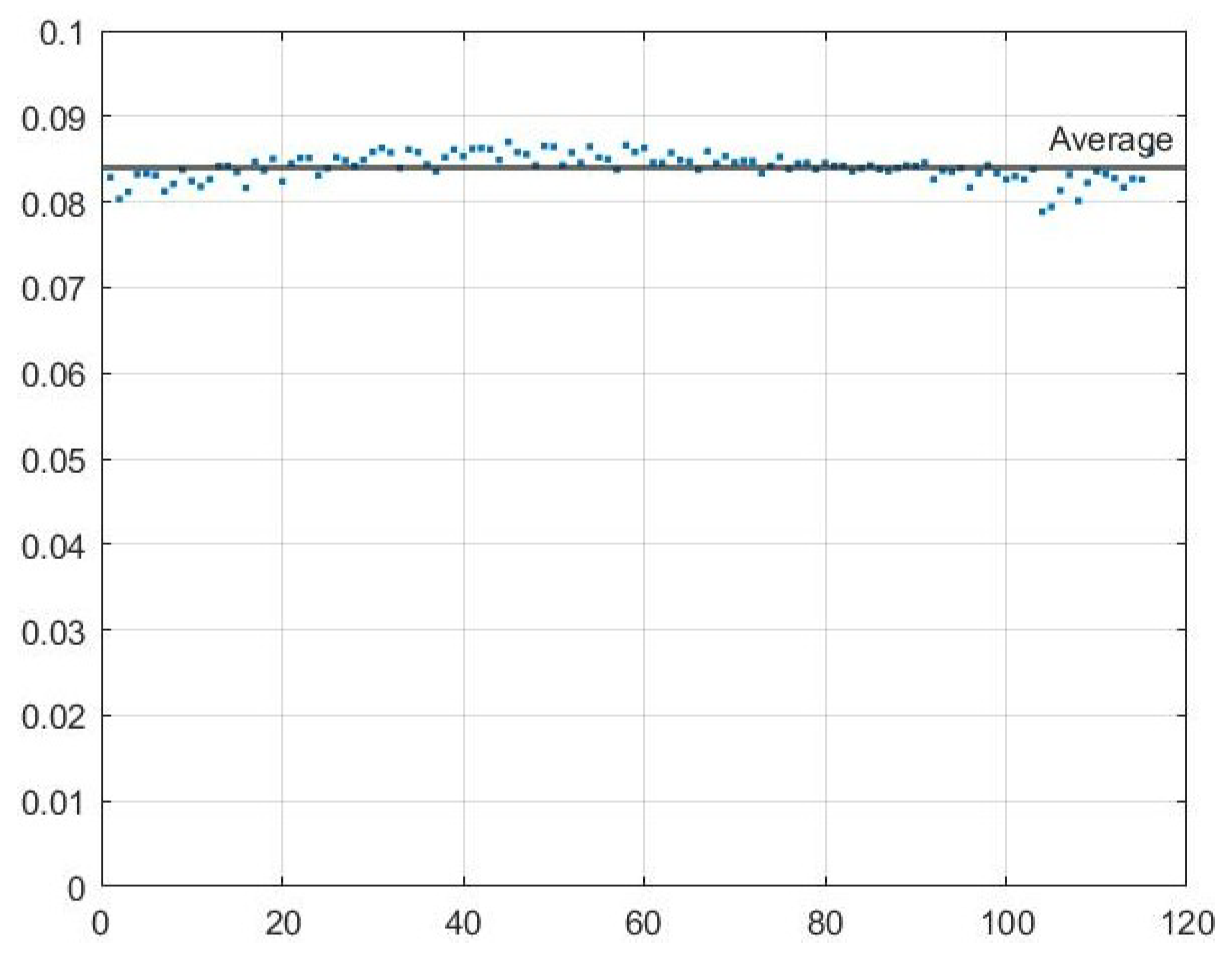
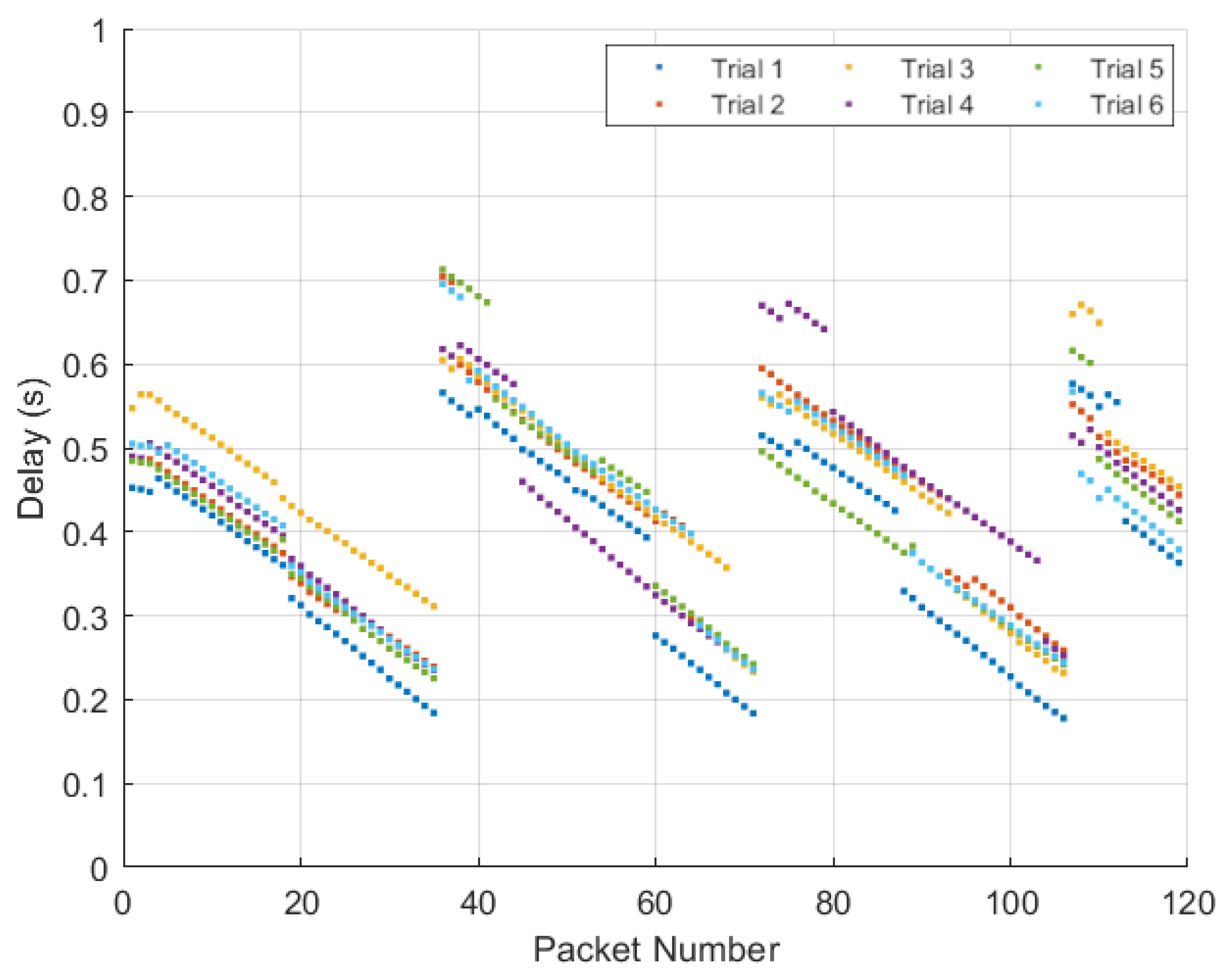
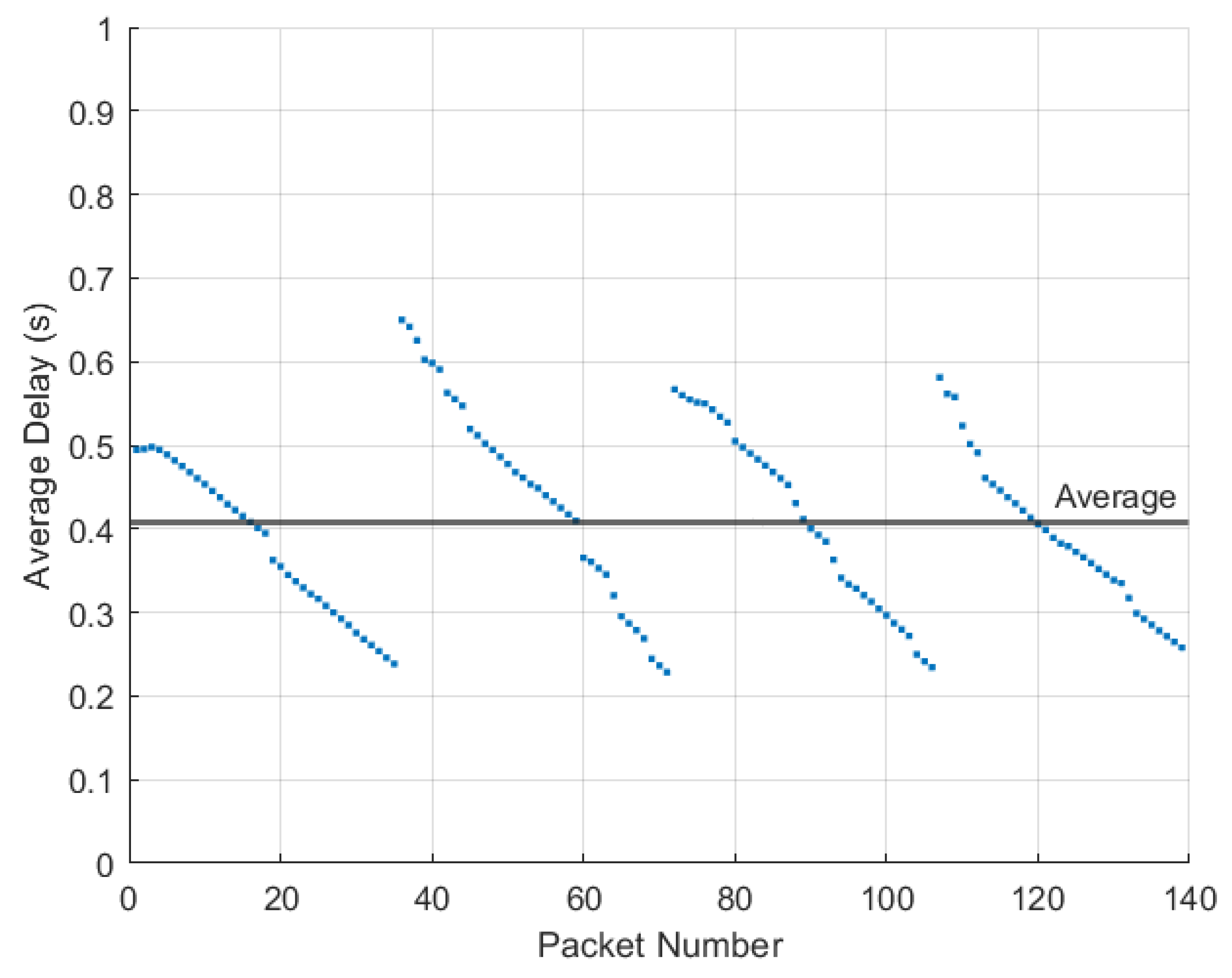
5.2. Network Metrics
5.3. Power Data & Calculations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BSS | Basic Service Set |
| CAN | controller area network |
| CAV | Connected and Autonomous Vehicle |
| DSRC | Dedicated Short-Range Communication |
| FCC | Federal Communications Commission |
| FPGA | Field-Programmable Gate Array |
| GPIO | general purpose input/output |
| ICMP | Internet Control Message Protocol |
| IEEE | Institute of Electrical and Electronics Engineers |
| IoV | Internet of Vehicles |
| ITS | Intelligent Transportation Systems |
| LiDAR | light detection and ranging |
| OCB | Outside the Context of a BSS |
| radar | radio detection and ranging |
| RSU | Road-side Unit |
| RSU-VIM | Road-Side Unit-based Virtual Intersection Management |
| SAE | Society of Automotive Engineers |
| SDR | Software Defined Radio |
| sonar | sound navigation and ranging |
| V2I | vehicle-to-infrastructure |
| V2R | vehicle-to-roadside unit |
| V2V | vehicle-to-vehicle |
| V2X | vehicle-to-everything |
| WAVE | Wireless Access in Vehicular Environments |
References
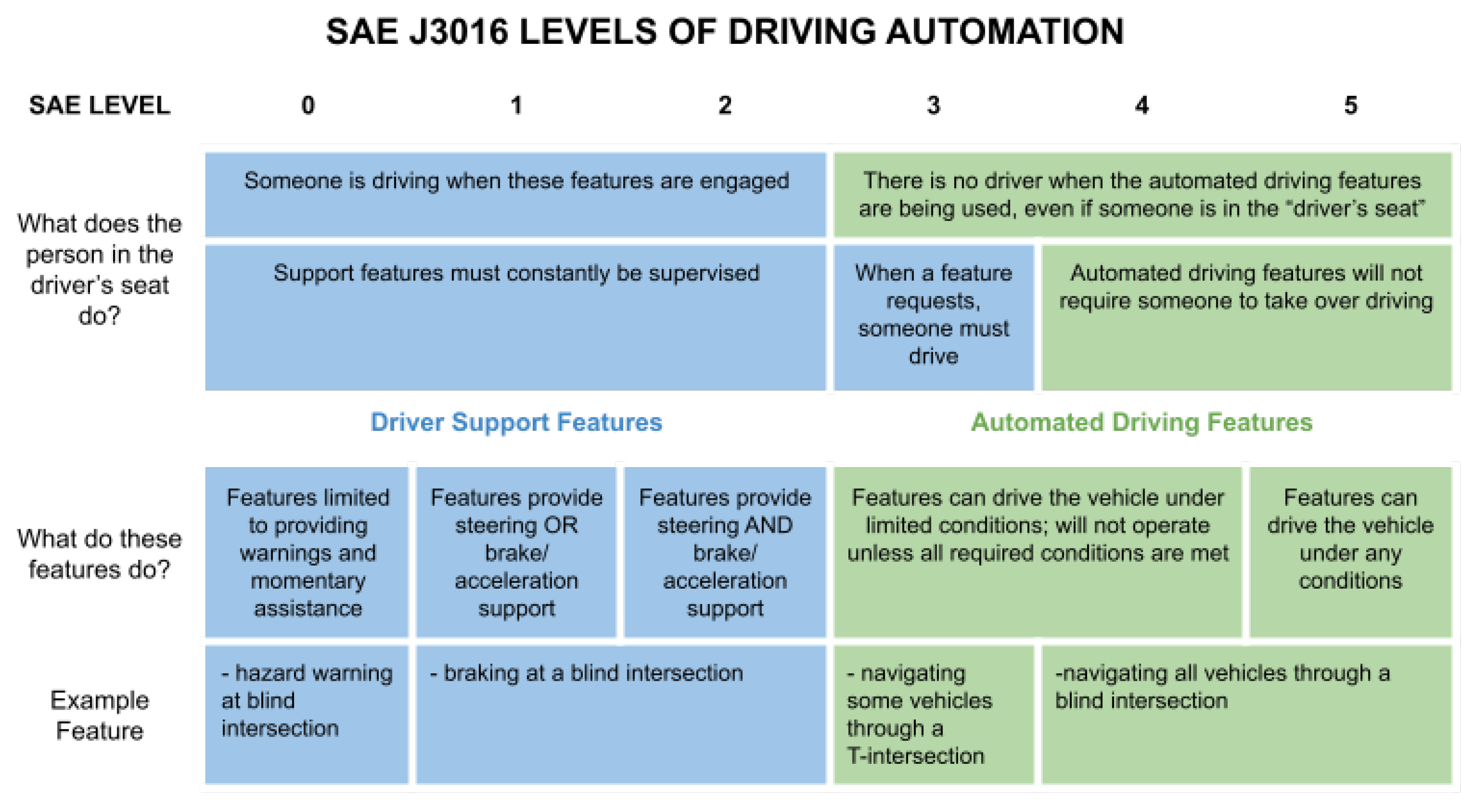
- Shuttleworth, J. Levels of Driving Automation; SAE International: Warrendale, PA, USA, 2019. [Google Scholar]
- Williams, B. Automated Driving Levels. Autom. Veh. Maas Removing Barriers 2021, 19–41. [Google Scholar] [CrossRef]
- Chen, M.; Gündüz, D.; Huang, K.; Saad, W.; Bennis, M.; Feljan, A.V.; Poor, H.V. Distributed Learning in Wireless Networks: Recent Progress and Future Challenges. IEEE J. Sel. Areas Commun. 2021, 39, 3579–3605. [Google Scholar] [CrossRef]
- Prezioso, E.; Giampaolo, F.; Mazzocca, C.; Bujari, A.; Mele, V.; Amato, F. Machine Learning insights for behavioural data analysis supporting the Autonomous Vehicles scenario. IEEE Internet Things J. 2021, 1. [Google Scholar] [CrossRef]
- Soner, B.; Coleri, S. Visible Light Communication Based Vehicle Localization for Collision Avoidance and Platooning. IEEE Trans. Veh. Technol. 2021, 70, 2167–2180. [Google Scholar] [CrossRef]
- Hwang, S.; Kim, S.; Yoon, H.; Kim, B.; Choi, S.; Bahk, S. Beyond Vision: Hidden Car Detector with On-Demand Relaying in Vehicular Communications. IEEE Trans. Veh. Technol. 2020, 69, 15177–15187. [Google Scholar] [CrossRef]
- Hung, S.C.; Zhang, X.; Festag, A.; Chen, K.C.; Fettweis, G. Vehicle-Centric Network Association in Heterogeneous Vehicle-to-Vehicle Networks. IEEE Trans. Veh. Technol. 2019, 68, 5981–5996. [Google Scholar] [CrossRef]
- Si, P.; He, Y.; Yao, H.; Yang, R.; Zhang, Y. DaVe: Offloading Delay-Tolerant Data Traffic to Connected Vehicle Networks. IEEE Trans. Veh. Technol. 2016, 65, 3941–3953. [Google Scholar] [CrossRef]
- Fernandez, J.A.; Borries, K.; Cheng, L.; Vijaya Kumar, B.V.K.; Stancil, D.D.; Bai, F. Performance of the 802.11p Physical Layer in Vehicle-to-Vehicle Environments. IEEE Trans. Veh. Technol. 2012, 61, 3–14. [Google Scholar] [CrossRef]
- Casimiro, A.; Ekenstedt, E.; Schiller, E.M. Self-Stabilizing Manoeuvre Negotiation: The Case of Virtual Traffic Lights. In Proceedings of the 2019 38th Symposium on Reliable Distributed Systems (SRDS), Lyon, France, 1–4 October 2019; pp. 354–3542. [Google Scholar] [CrossRef]
- Nasir, H.; Ahmed, A.B.; Tariq, M.; Kazmi, S.A.A. Evaluation and Analysis of Sustainable Microgrids and Communication Policy: A test case of Balochistan. In Proceedings of the 2019 4th International Conference on Emerging Trends in Engineering, Sciences and Technology (ICEEST), Karachi, Pakistan, 10–11 December 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Narksri, P.; Takeuchi, E.; Ninomiya, Y.; Takeda, K. Crossing Blind Intersections from a Full Stop Using Estimated Visibility of Approaching Vehicles. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 2427–2434. [Google Scholar] [CrossRef]
- Yoshihara, Y.; Morales, Y.; Akai, N.; Takeuchi, E.; Ninomiya, Y. Autonomous predictive driving for blind intersections. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3452–3459. [Google Scholar] [CrossRef]
- Tayeb, S.; Gill, S.; Trueblood, F.; Wong, R.; Pirouz, M. A Network-Centric Analysis for the Internet of Vehicles and Simulation Tools. IEEE Access 2020, 8, 68342–68364. [Google Scholar] [CrossRef]
- Gill, S.; Wong, R.; Tayeb, S.; Trueblood, F.; Pirouz, M. Optimizing Connectivity for the Internet of Vehicles. In Proceedings of the Future Technologies Conference (FTC), Vancouver, BC, Canada, 5–6 November 2020; Arai, K., Kapoor, S., Bhatia, R., Eds.; Springer International Publishing: Cham, Switzerland, 2021; Volume 3, pp. 578–596. [Google Scholar]
- Trueblood, F.; Gill, S.; Wong, R.; Tayeb, S.; Pirouz, M. A Data-Centric Approach to Taming the Message Dissemination in the Internet of Vehicles. In Proceedings of the 2020 10th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 6–8 January 2020; pp. 207–214. [Google Scholar] [CrossRef]
- Davis, A.; Gill, S.; Wong, R.; Tayeb, S. Feature selection for deep neural networks in cyber security applications. In Proceedings of the 2020 IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS), Vancouver, BC, Canada, 9–12 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–7. [Google Scholar]
- Basavaraj, D.; Tayeb, S. Towards a Lightweight Intrusion Detection Framework for In-Vehicle Networks. J. Sens. Actuator Netw. 2022, 11, 6. [Google Scholar] [CrossRef]
- Jeong, J.P. IPv6 Wireless Access in Vehicular Environments (IPWAVE): Problem Statement and Use Cases. Internet-Draft Draft-Ietf-Ipwave-Vehicular-Networking-23, Internet Engineering Task Force. 2021. Available online: https://www.ietf.org/id/draft-ietf-ipwave-vehicular-networking-29.html (accessed on 15 April 2022).
- Naik, G.; Choudhury, B.; Park, J. IEEE 802.11bd 5G NR V2X: Evolution of Radio Access Technologies for V2X Communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar] [CrossRef]
- Johnson, D.B.; Arkko, J.; Perkins, C.E. Mobility Support in IPv6. RFC 6275. 2011. Available online: https://www.rfc-editor.org/info/rfc6275 (accessed on 21 October 2021).
- Zhang, R.; Schmutz, F.; Gerard, K.; Pomini, A.; Basseto, L.; Hassen, S.B.; Ishikawa, A.; Ozgunes, I.; Tonguz, O. Virtual Traffic Lights: System Design and Implementation. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Ferreira, M.; Fernandes, R.; Conceição, H.; Viriyasitavat, W.; Tonguz, O.K. Self-Organized Traffic Control. In Proceedings of the Seventh ACM International Workshop on VehiculAr InterNETworking, Chicago, IL, USA, 24 September 2010; Association for Computing Machinery: New York, NY, USA, 2010; pp. 85–90. [Google Scholar] [CrossRef]
- Bazzi, A.; Zanella, A.; Masini, B.M. A Distributed Virtual Traffic Light Algorithm Exploiting Short Range V2V Communications. Ad Hoc Netw. 2016, 49, 42–57. [Google Scholar] [CrossRef]
- Garg, D.; Chli, M.; Vogiatzis, G. Deep Reinforcement Learning for Autonomous Traffic Light Control. In Proceedings of the 2018 3rd IEEE International Conference on Intelligent Transportation Engineering (ICITE), Singapore, 3–5 September 2018; pp. 214–218. [Google Scholar] [CrossRef]
- Gohania, J.; Lobiyal, D.K. A Prototype Model for Virtual Traffic Light Maintenance using AIS. In Proceedings of the 2020 IEEE International Women in Engineering (WIE) Conference on Electrical and Computer Engineering (WIECON-ECE), Bhubaneswar, India, 26–27 December 2020; pp. 25–28. [Google Scholar] [CrossRef]
- Wang, G.; Hou, Y.; Zhang, Y.; Zhou, Y.; Lu, N.; Cheng, N. TLB-VTL: 3-Level Buffer Based Virtual Traffic Light Scheme for Intelligent Collaborative Intersections. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Abdulrazzak, H.N.; Tan, N.M.L.; Mohd Radzi, N.A. Minimizing Energy Consumption in Roadside Unit of Zigzag Distribution Based on RS-LS Technique. In Proceedings of the 2021 IEEE International Conference on Automatic Control Intelligent Systems (I2CACIS), Shah Alam, Malaysia, 26 June 2021; pp. 169–173. [Google Scholar] [CrossRef]
- Al Shareeda, M.; Khalil, A.; Fahs, W. Towards the Optimization of Road Side Unit Placement Using Genetic Algorithm. In Proceedings of the 2018 International Arab Conference on Information Technology (ACIT), Werdanye, Lebanon, 28–30 November 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Patra, M.; Murthy, C.S.R. Performance Evaluation of Joint Placement and Sleep Scheduling of Grid-Connected Solar Powered Road Side Units in Vehicular Networks. IEEE Trans. Green Commun. Netw. 2018, 2, 1197–1209. [Google Scholar] [CrossRef]
- Kovalev, K.; Agafonov, A. Authentication Scheme in Vehicular Ad Hoc Networks Based on Road Side Unit Infrastructure. In Proceedings of the 2021 International Conference on Information Technology and Nanotechnology (ITNT), Samara, Russia, 26–29 May 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Jolfaei, A.; Kant, K. Privacy and Security of Connected Vehicles in Intelligent Transportation System. In Proceedings of the 2019 49th Annual IEEE/IFIP International Conference on Dependable Systems and Networks-Supplemental Volume (DSN-S), Portland, OR, USA, 24–27 June 2019; pp. 9–10. [Google Scholar] [CrossRef]
- Abhishek, N.V.; Aman, M.N.; Lim, T.J.; Sikdar, B. DRiVe: Detecting Malicious Roadside Units in the Internet of Vehicles With Low Latency Data Integrity. IEEE Internet Things J. 2022, 9, 3270–3281. [Google Scholar] [CrossRef]
- Renogy. System Setup. Available online: https://www.youtube.com/watch?v=TLPGmqHKoD0 (accessed on 13 August 2022).
- Bloessl, B.; Segata, M.; Sommer, C.; Dressler, F. Performance Assessment of IEEE 802.11p with an Open Source SDR-Based Prototype. IEEE Trans. Mob. Comput. 2018, 17, 1162–1175. [Google Scholar] [CrossRef]
- ghostop14; Velichkov, V. gr-correctiq. GitHub Repos. 2021. Available online: https://github.com/ghostop14/gr-correctiq (accessed on 13 August 2022).





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Current (A) | Voltage (V) | Power (W) |
|---|---|---|---|
| Raspberry Pi | 0.58 | 5.0 | 2.9 |
| DE2-115 and Inverter | 0.67 | 12.31 | 8.25 |
| HackRF One | 0.14 | 5.0 | 0.7 |
| Total | 11.85 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wong, R.; White, J.; Gill, S.; Tayeb, S. Virtual Traffic Light Implementation on a Roadside Unit over 802.11p Wireless Access in Vehicular Environments. Sensors 2022, 22, 7699. https://doi.org/10.3390/s22207699
Wong R, White J, Gill S, Tayeb S. Virtual Traffic Light Implementation on a Roadside Unit over 802.11p Wireless Access in Vehicular Environments. Sensors. 2022; 22(20):7699. https://doi.org/10.3390/s22207699
Chicago/Turabian StyleWong, Robert, Jack White, Sumanjit Gill, and Shahab Tayeb. 2022. "Virtual Traffic Light Implementation on a Roadside Unit over 802.11p Wireless Access in Vehicular Environments" Sensors 22, no. 20: 7699. https://doi.org/10.3390/s22207699
APA StyleWong, R., White, J., Gill, S., & Tayeb, S. (2022). Virtual Traffic Light Implementation on a Roadside Unit over 802.11p Wireless Access in Vehicular Environments. Sensors, 22(20), 7699. https://doi.org/10.3390/s22207699