
Experimental Validation of a Model-Free High-Order Sliding Mode Controller with Finite-Time Convergence for Trajectory Tracking of Autonomous Underwater Vehicles

 ,
,  ,
,  ,
,  ,
,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
Related Work
2. Materials and Methods
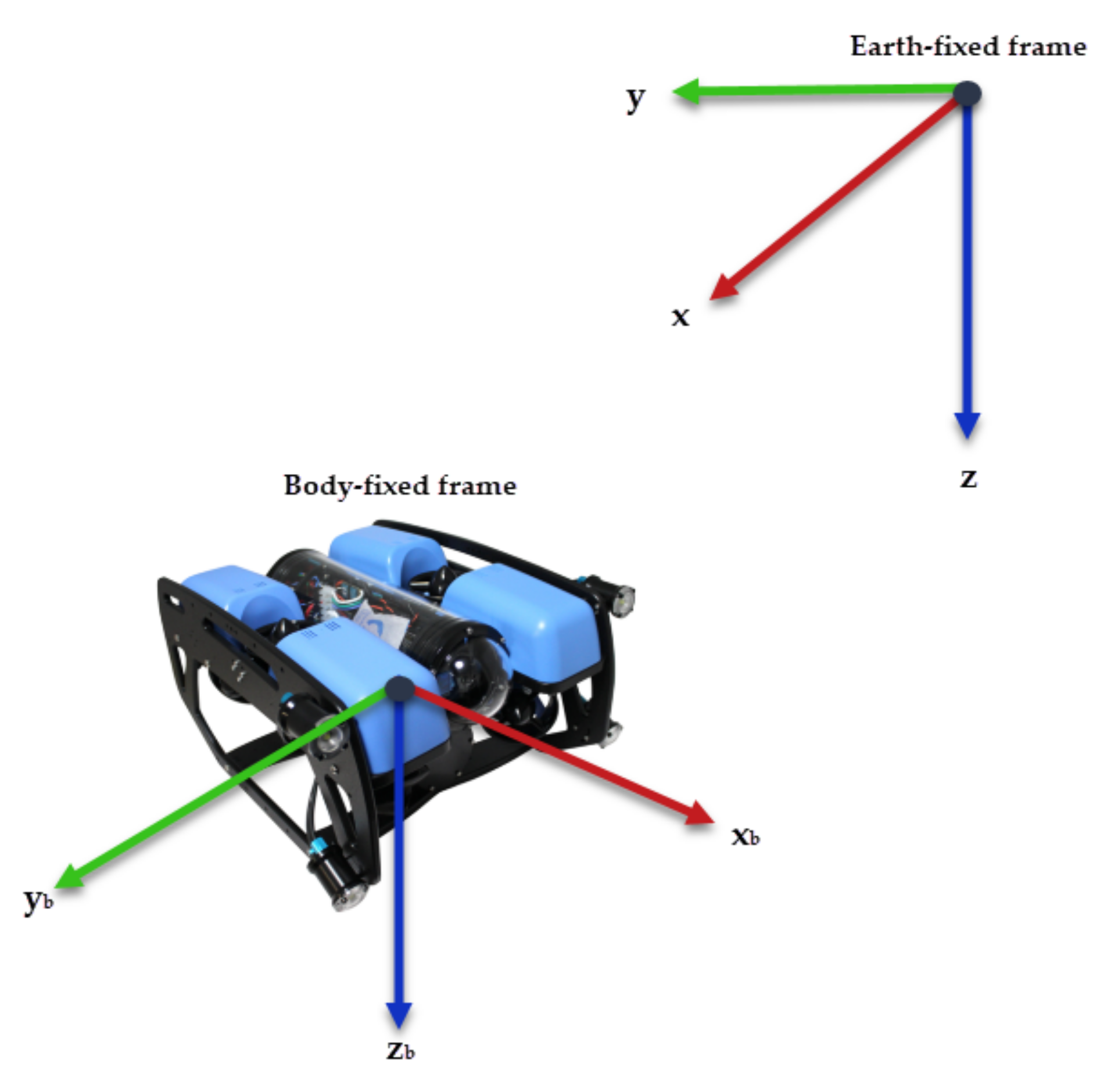
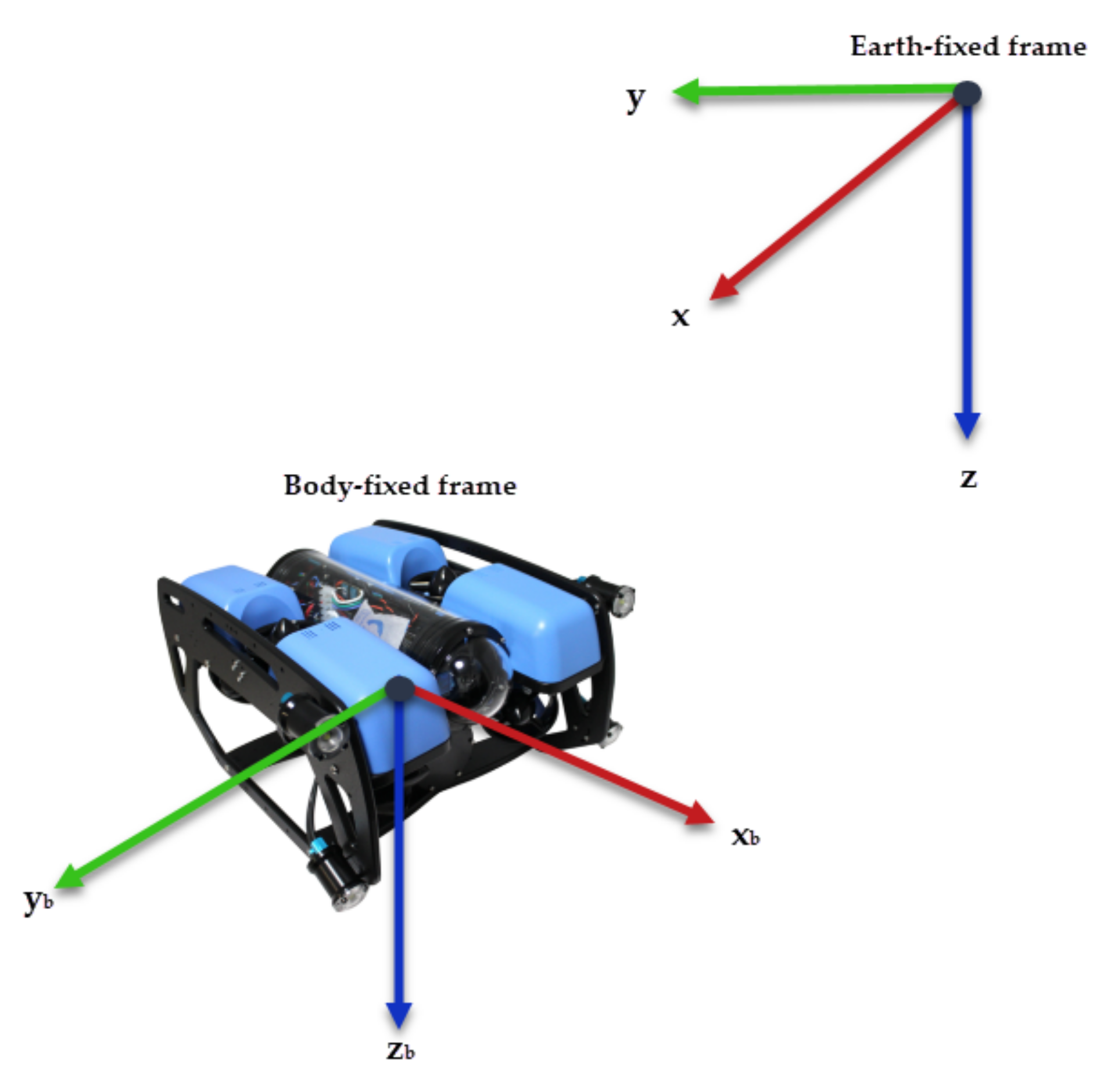
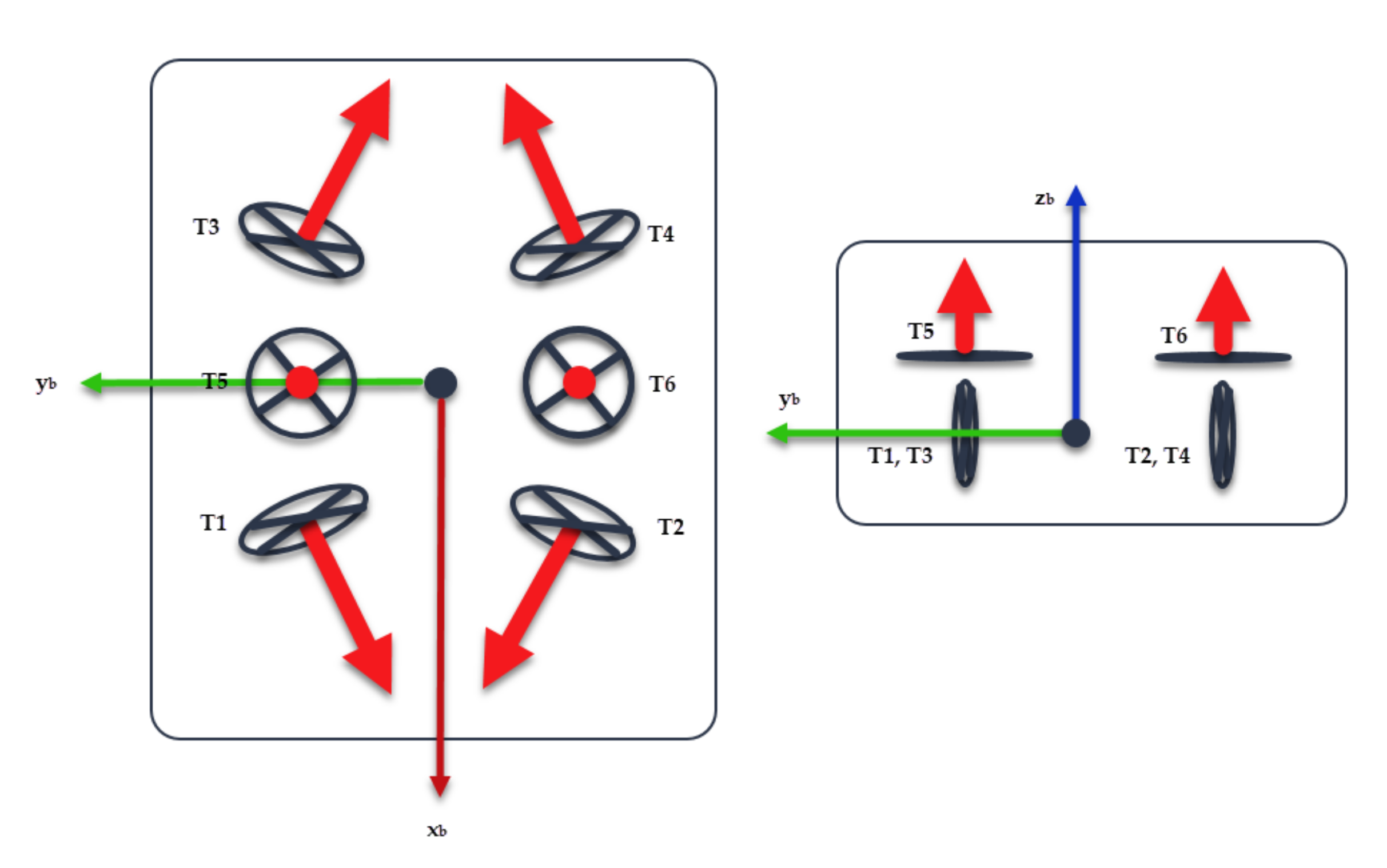
2.1. Autonomous Underwater Vehicles Kinematics and Hydrodynamics
- is the inertial and added mass matrix,
- is the rigid body and added mass centripetal and Coriolis matrix,
- is the hydrodynamic damping matrix,
- is the restitution forces vector,
- is the control signal vector,
- is the thruster allocation matrix,
- is a vector containing the force generated by the thrusters, and
- represents environmental disturbances.
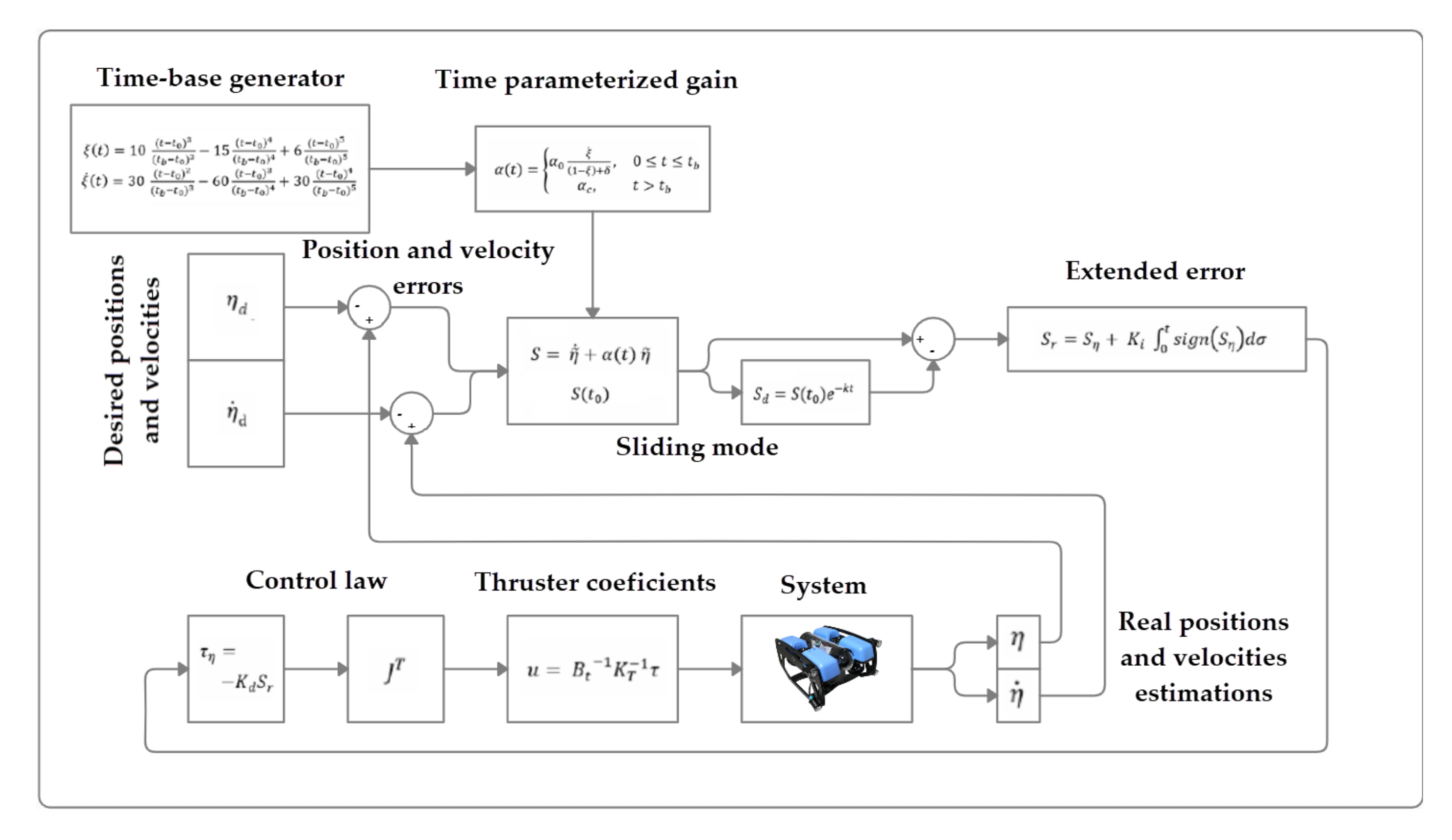
2.2. Finite-Time Controller with Convergence in a Predefined Time
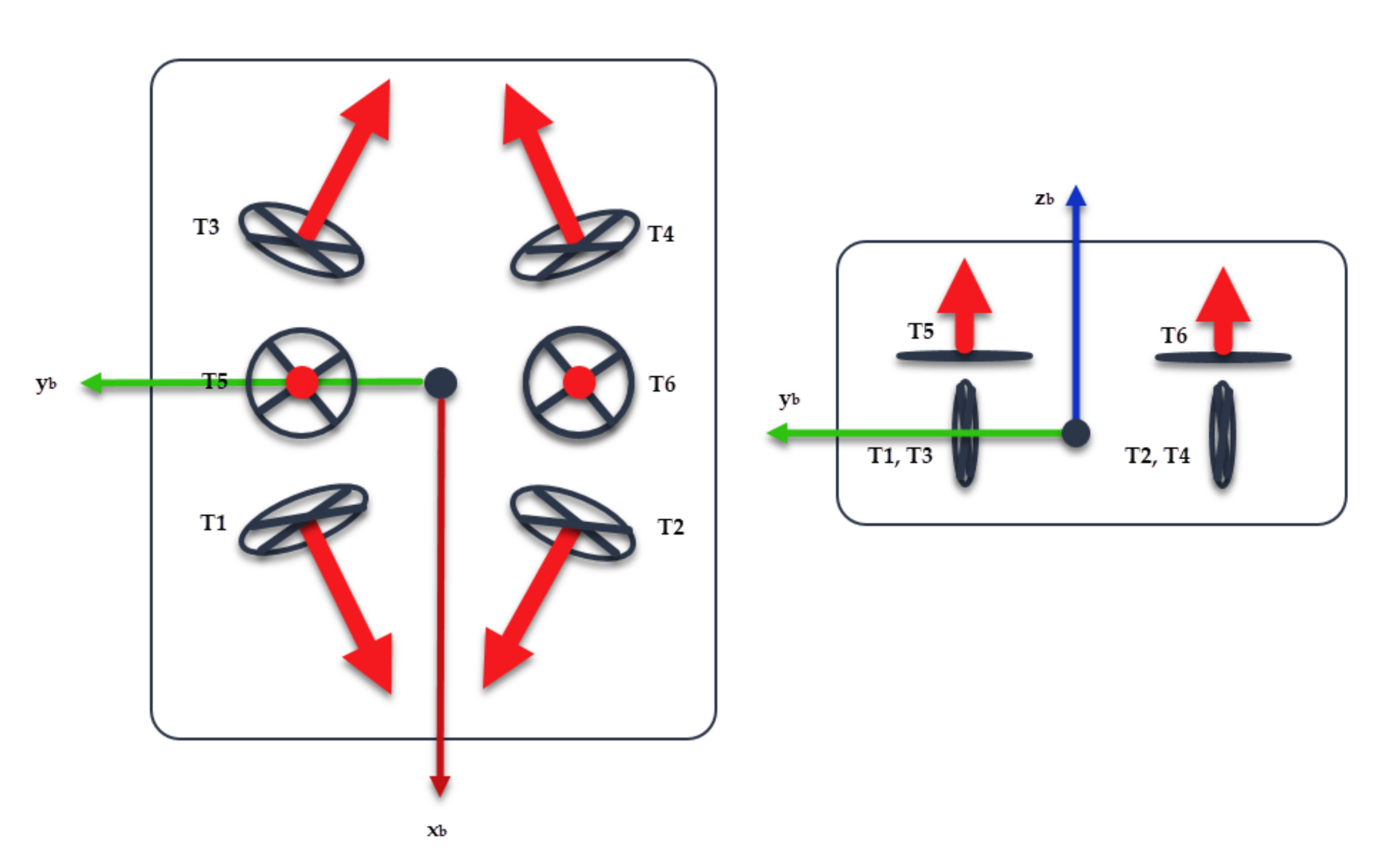
2.3. BlueROV2 Robot
2.4. Exact Differentiatior
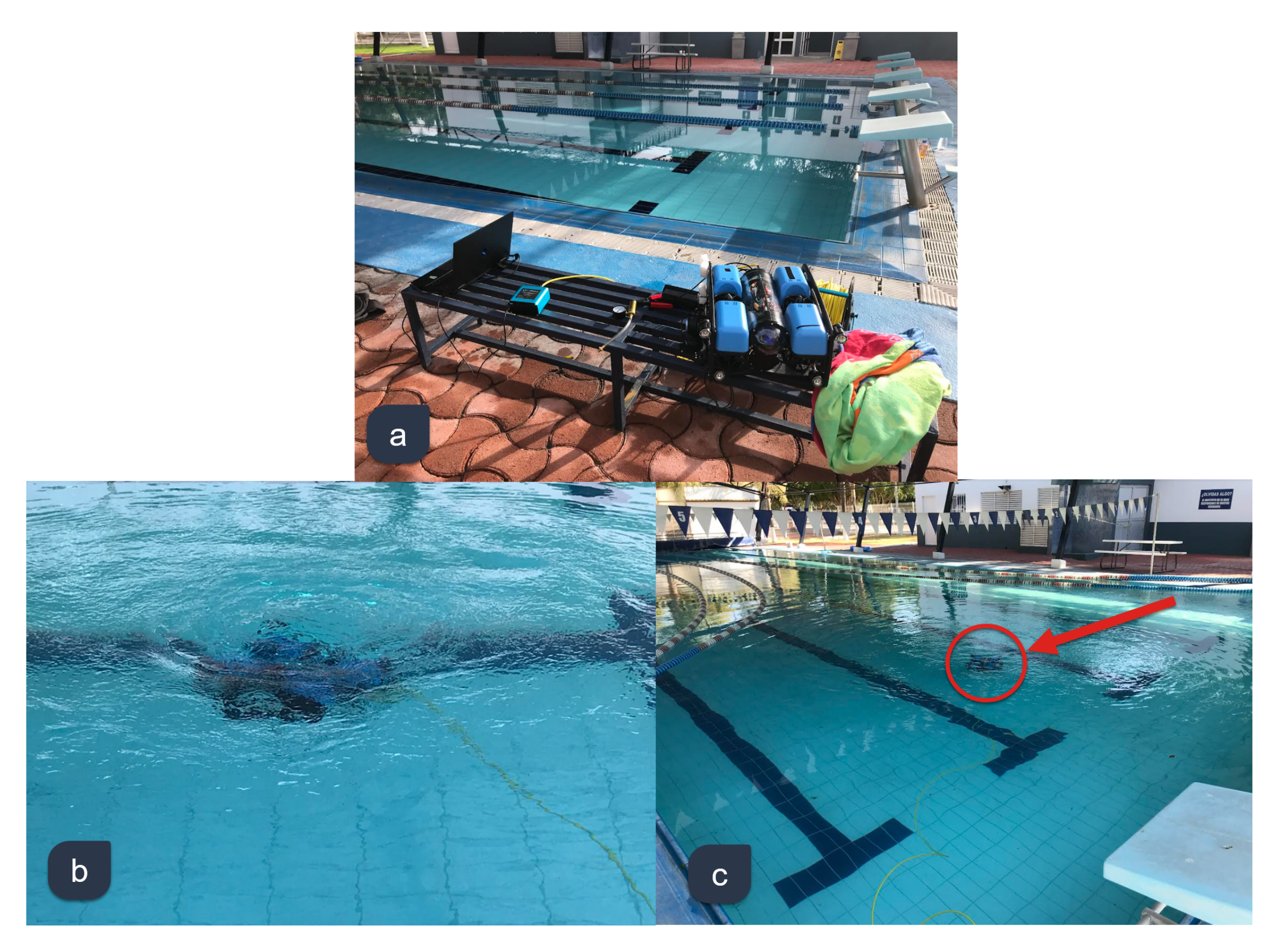
3. Experimental Set-Up
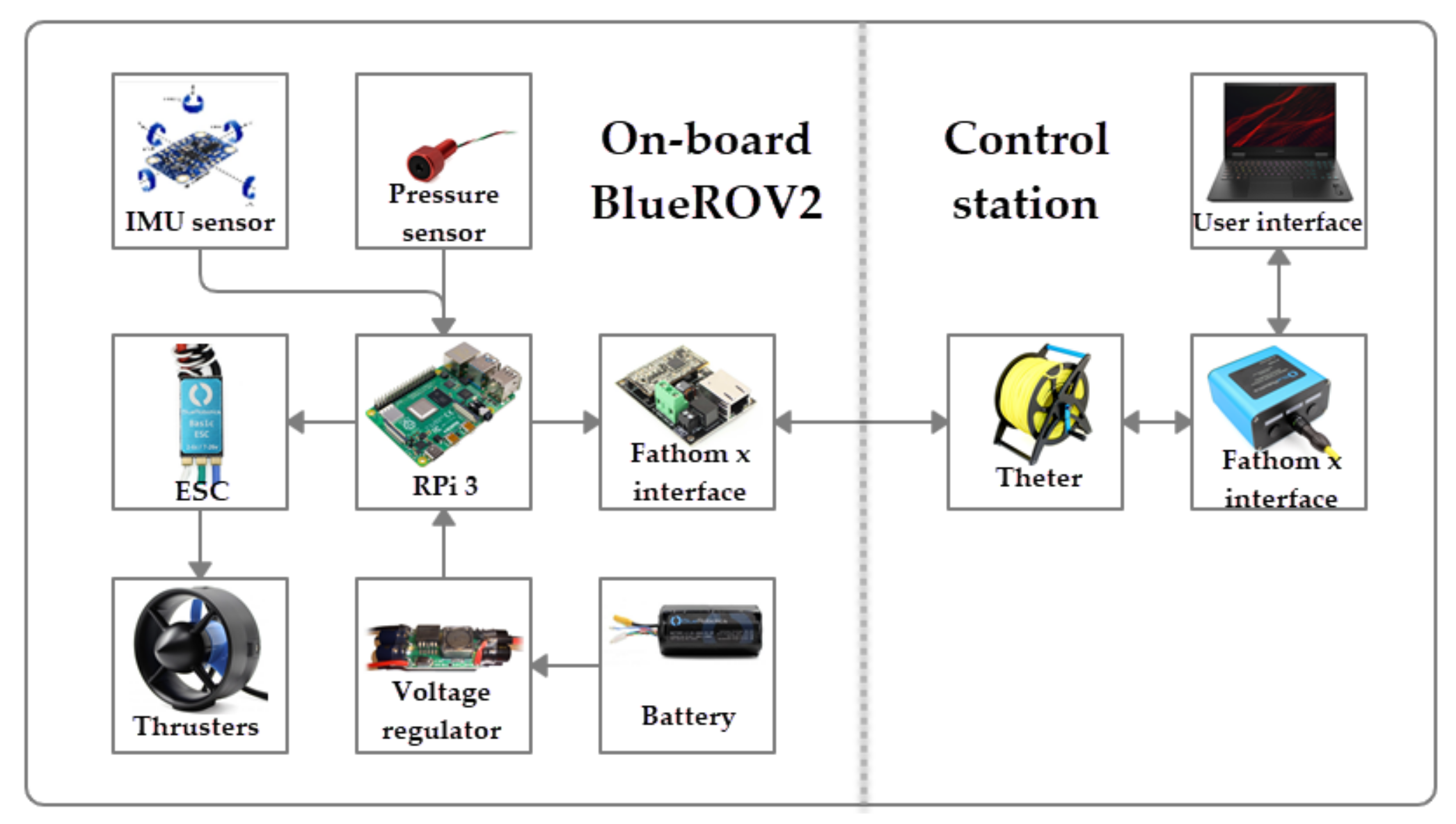
3.1. Hardware
3.2. Software
3.3. Time-Parameterized Trajectories
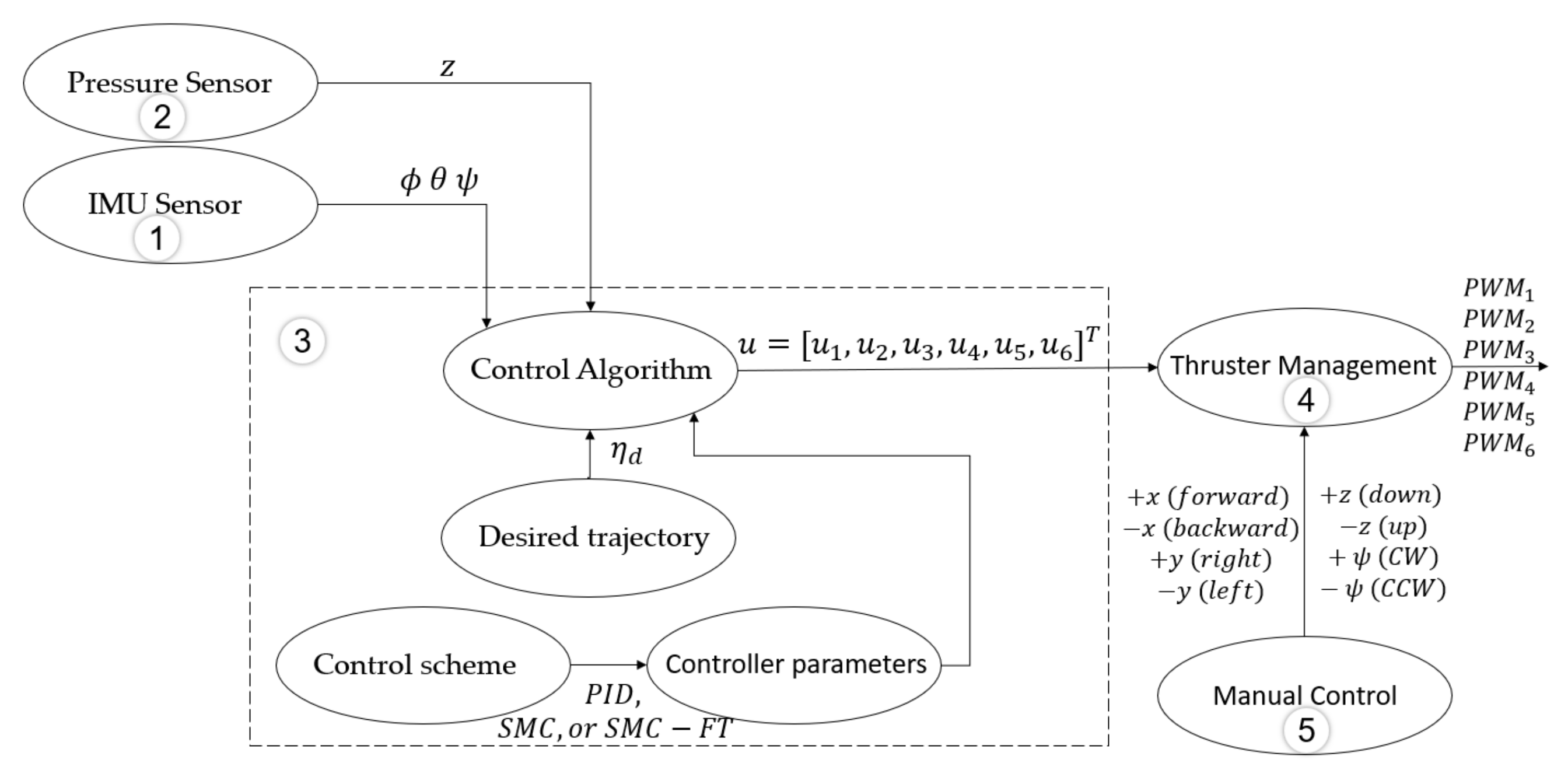
3.4. Control Algorithms
3.4.1. PID Control
3.4.2. Model-Free High-Order SMC (Asymptotic)
3.4.3. Model-Free High-Order SMC (Finite-Time)
3.5. Exact Differentiator Algorithm
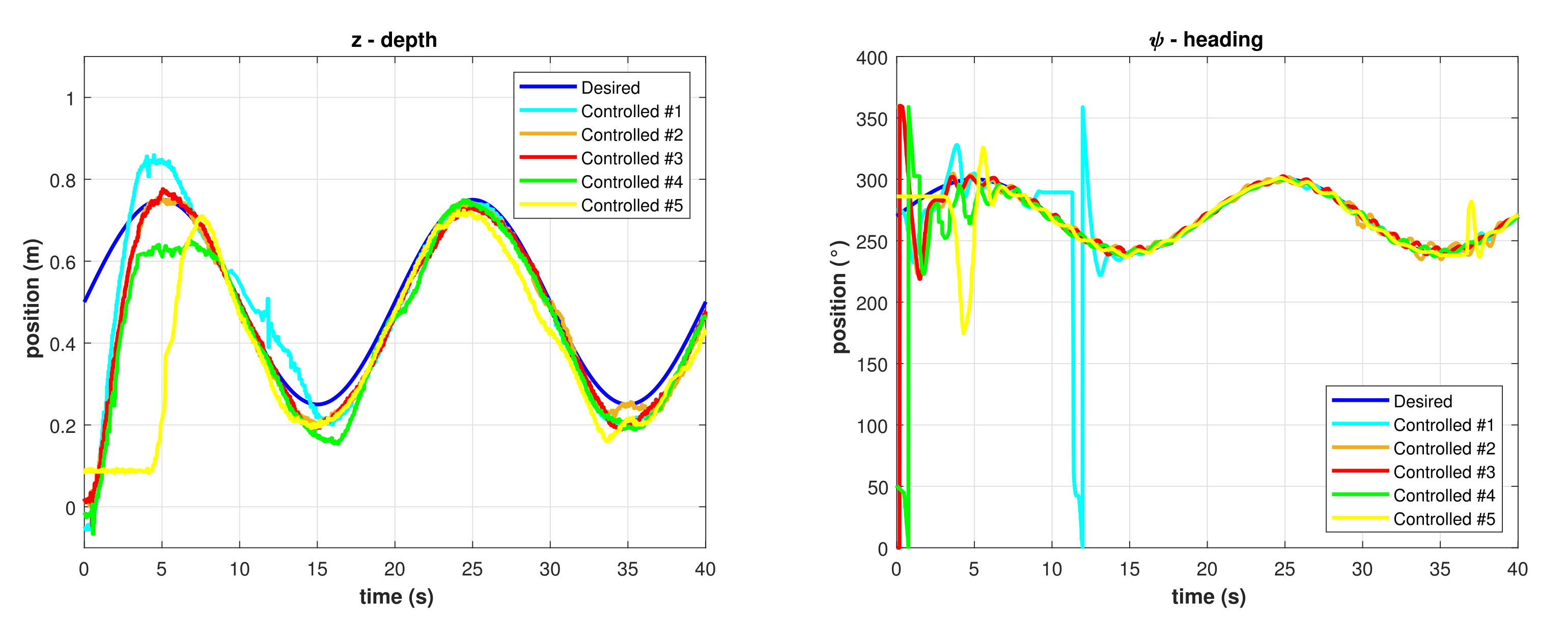
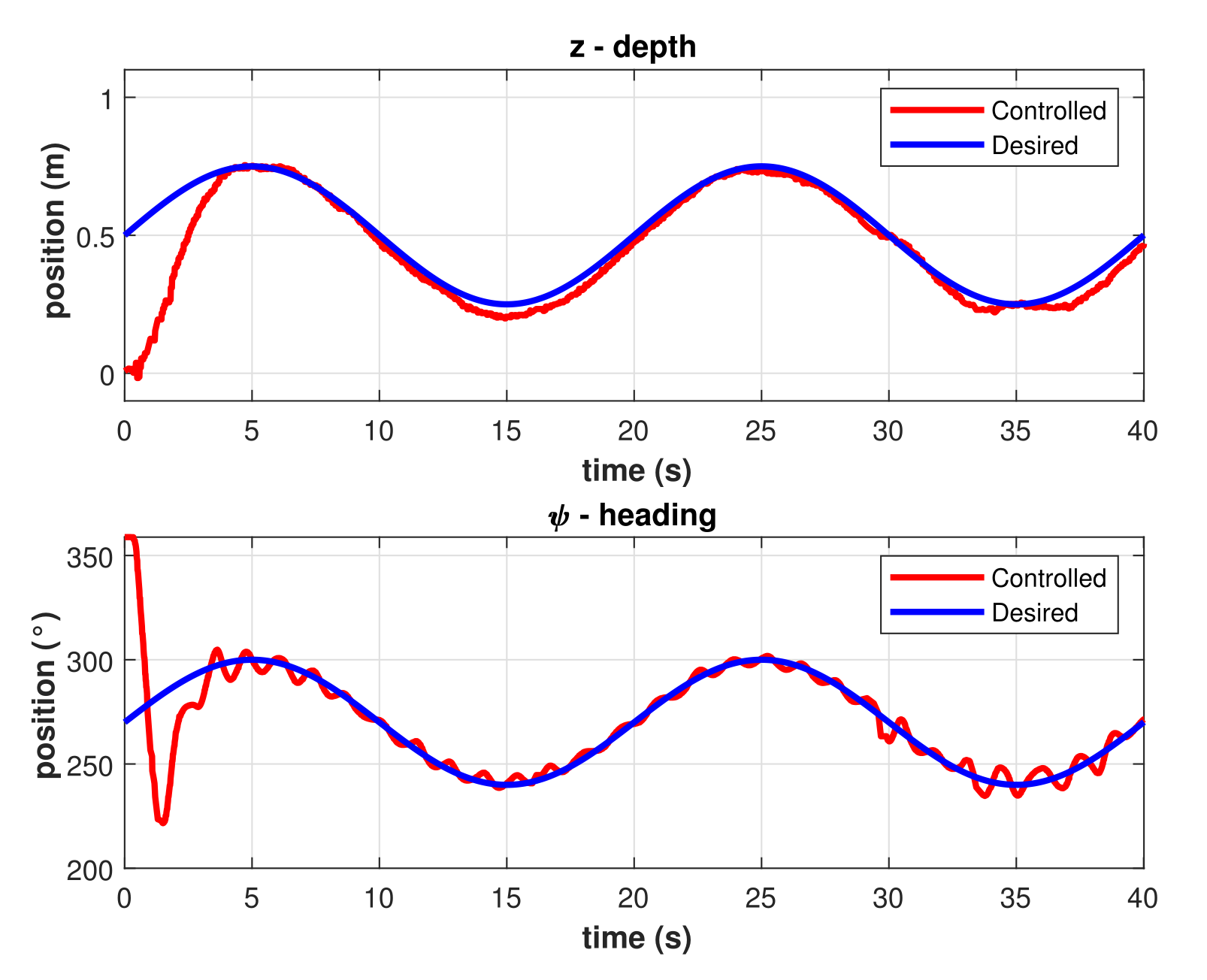
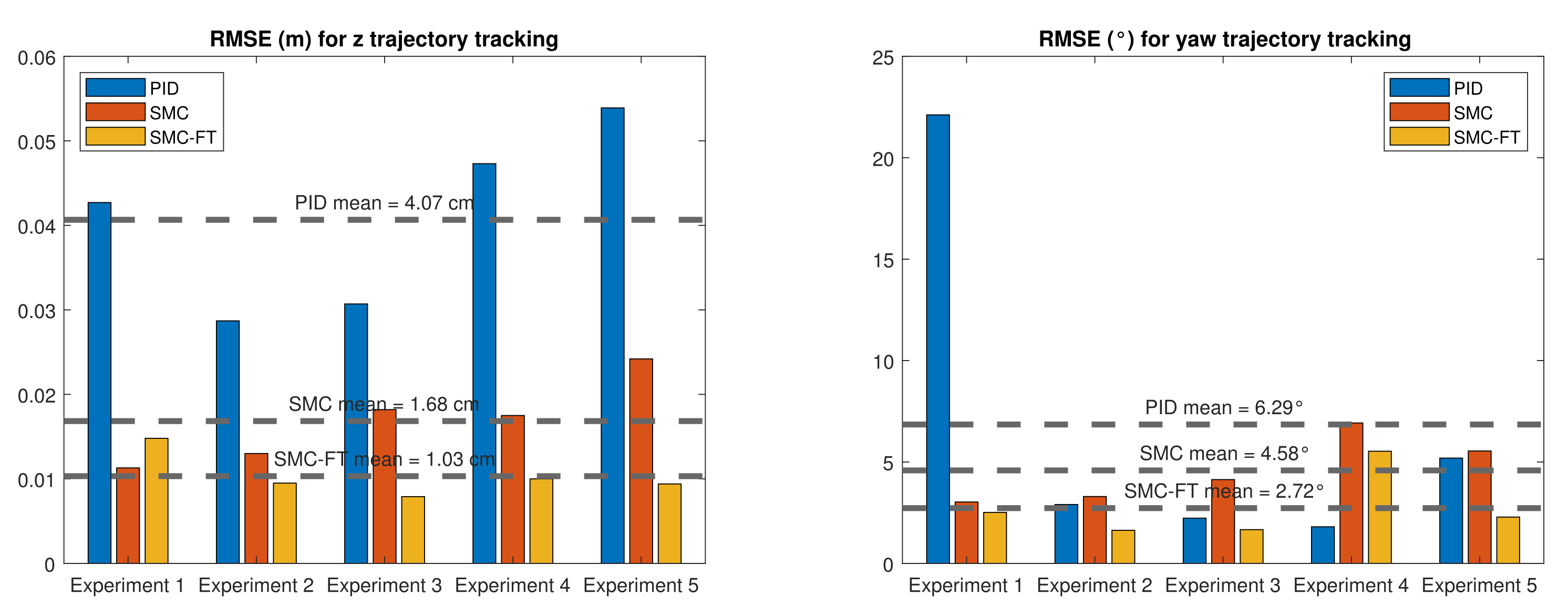
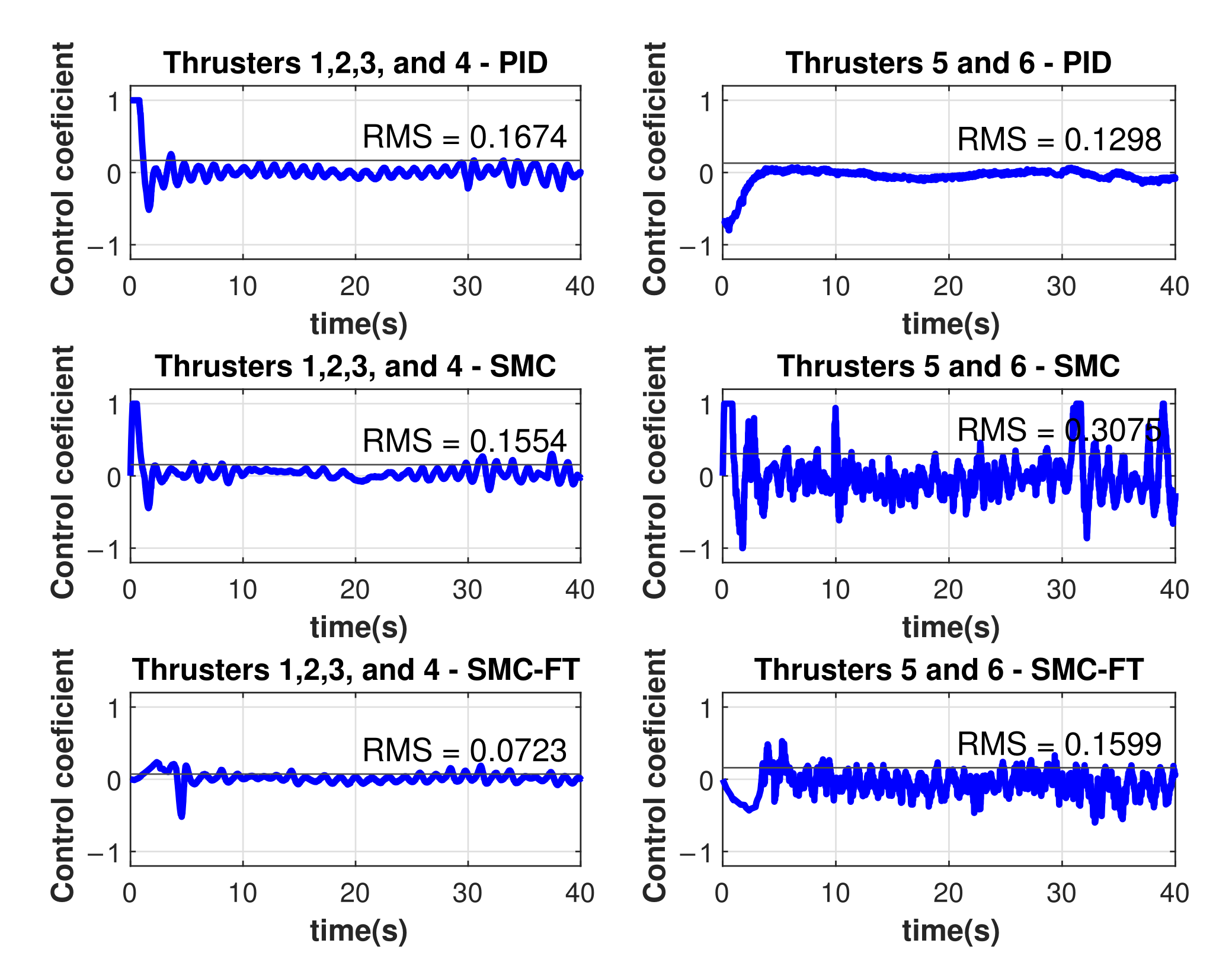
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AUV | Autonomous Underwater Vehicles |
| DoF | Degrees Of Freedom |
| ESC | Electronic Speed Controllers |
| PID | Proportional Integrate Derivative |
| PWM | Pulse Wide Modulation |
| RMS | Root Mean Square |
| RMSE | Root Mean Square Error |
| ROV | Remotely Operated Vehicle |
| ROS | Robot Operating System |
| RPi | Raspberry Pi |
| SMC | Sliding Mode Control |
| SNAME | Society of Naval Architects and Marine Engineers |
| TBG | Time-Base Generator |
References
- Palomer, A.; Ridao, P.; Ribas, D. Inspection of an underwater structure using point-cloud SLAM with an AUV and a laser scanner. J. Field Robot. 2019, 36, 1333–1344. [Google Scholar] [CrossRef]
- Rumson, A.G. The application of fully unmanned robotic systems for inspection of subsea pipelines. Ocean Eng. 2021, 235, 109214. [Google Scholar] [CrossRef]
- Hwang, J.; Bose, N.; Nguyen, H.D.; Williams, G. Acoustic search and detection of oil plumes using an autonomous underwater vehicle. J. Mar. Sci. Eng. 2020, 8, 618. [Google Scholar] [CrossRef]
- Hernández, J.D.; Istenič, K.; Gracias, N.; Palomeras, N.; Campos, R.; Vidal, E.; García, R.; Carreras, M. Autonomous underwater navigation and optical mapping in unknown natural environments. Sensors 2016, 16, 1174. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sánchez, P.J.B.; Papaelias, M.; Márquez, F.P.G. Autonomous underwater vehicles: Instrumentation and measurements. IEEE Instrum. Meas. Mag. 2020, 23, 105–114. [Google Scholar] [CrossRef]
- Simetti, E. Autonomous Underwater Intervention. Curr. Robot. Rep. 2020, 1, 117–122. [Google Scholar] [CrossRef]
- González-García, J.; Gómez-Espinosa, A.; Cuan-Urquizo, E.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Escobedo Cabello, J.A. Autonomous underwater vehicles: Localization, navigation, and communication for collaborative missions. Appl. Sci. 2020, 10, 1256. [Google Scholar] [CrossRef] [Green Version]
- Kim, E.; Fan, S.; Bose, N.; Nguyen, H. Path Following for an Autonomous Underwater Vehicle (AUV) by Using a High-Gain Observer based on an AUV Dynamic Model. IFAC-PapersOnLine 2019, 52, 218–223. [Google Scholar] [CrossRef]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Control for Dynamic Positioning and Way-point Tracking of Underactuated Autonomous Underwater Vehicles Using Sliding Mode Control. J. Intell. Robot. Syst. Theory Appl. 2019, 95, 1113–1132. [Google Scholar] [CrossRef]
- Li, Y.; Qing Jiang, Y.; Feng Wang, L.; Cao, J.; Cheng Zhang, G. Intelligent PID guidance control for AUV path tracking. J. Cent. South Univ. 2015, 22, 3440–3449. [Google Scholar] [CrossRef]
- Li, D.; Du, L. Auv trajectory tracking models and control strategies: A review. J. Mar. Sci. Eng. 2021, 9, 1020. [Google Scholar] [CrossRef]
- Gan, W.Y.; Zhu, D.Q.; Xu, W.L.; Sun, B. Survey of trajectory tracking control of autonomous underwater vehicles. J. Mar. Sci. Technol. 2017, 25, 722–731. [Google Scholar] [CrossRef]
- Guerrero, J.; Torres, J.; Creuze, V.; Chemori, A.; Campos, E. Saturation based nonlinear PID control for underwater vehicles: Design, stability analysis and experiments. Mechatronics 2019, 61, 96–105. [Google Scholar] [CrossRef] [Green Version]
- Qiao, L.; Yi, B.; Wu, D.; Zhang, W. Design of three exponentially convergent robust controllers for the trajectory tracking of autonomous underwater vehicles. Ocean Eng. 2017, 134, 157–172. [Google Scholar] [CrossRef]
- Rezazadegan, F.; Shojaei, K.; Sheikholeslam, F.; Chatraei, A. A novel approach to 6-DOF adaptive trajectory tracking control of an AUV in the presence of parameter uncertainties. Ocean Eng. 2015, 107, 246–258. [Google Scholar] [CrossRef]
- Yu, C.; Xiang, X.; Zhang, Q.; Xu, G. Adaptive Fuzzy Trajectory Tracking Control of an Under-Actuated Autonomous Underwater Vehicle Subject to Actuator Saturation. Int. J. Fuzzy Syst. 2018, 20, 269–279. [Google Scholar] [CrossRef]
- Cho, G.R.; Li, J.H.; Park, D.; Jung, J.H. Robust trajectory tracking of autonomous underwater vehicles using back-stepping control and time delay estimation. Ocean Eng. 2020, 201, 107131. [Google Scholar] [CrossRef]
- García-Valdovinos, L.G.; Fonseca-Navarro, F.; Aizpuru-Zinkunegi, J.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Cruz-Ledesma, J.A. Neuro-Sliding Control for Underwater ROV’s Subject to Unknown Disturbances. Sensors 2019, 19, 2943. [Google Scholar] [CrossRef] [Green Version]
- Qin, H.; Li, C.; Sun, Y.; Li, X.; Du, Y.; Deng, Z. Finite-time trajectory tracking control of unmanned surface vessel with error constraints and input saturations. J. Frankl. Inst. 2020, 357, 11472–11495. [Google Scholar] [CrossRef]
- Ramezani-al, M.R.; Tavanaei Sereshki, Z. A novel adaptive sliding mode controller design for tracking problem of an AUV in the horizontal plane. Int. J. Dyn. Control 2019, 7, 679–689. [Google Scholar] [CrossRef]
- Yu, H.; Guo, C.; Yan, Z. Globally finite-time stable three-dimensional trajectory-tracking control of underactuated UUVs. Ocean Eng. 2019, 189, 106329. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Double-Loop Integral Terminal Sliding Mode Tracking Control for UUVs with Adaptive Dynamic Compensation of Uncertainties and Disturbances. IEEE J. Ocean Eng. 2019, 44, 29–53. [Google Scholar] [CrossRef]
- González-García, J.; Narcizo-Nuci, N.A.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Cuan-Urquizo, E.; Cabello, J.A.E. Model-free high order sliding mode control with finite-time tracking for unmanned underwater vehicles. Appl. Sci. 2021, 11, 1836. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons, Ltd.: Chichester, UK, 2011. [Google Scholar] [CrossRef]
- Garcia-Valdovinos, L.G.; Parra-Vega, V.; Mendez-Iglesias, J.A.; Arteaga, M.A. Cartesian sliding PID force/position control for transparent bilateral teleoperation. IECON Proc. (Ind. Electron. Conf.) 2005, 2005, 1979–1985. [Google Scholar] [CrossRef]
- García-Valdovinos, L.G.; Parra-Vega, V.; Arteaga, M.A. Bilateral Cartesian sliding PID force/position control for tracking in finite time of master-slave systems. Proc. Am. Control Conf. 2006, 2006, 369–375. [Google Scholar] [CrossRef]
- García-Valdovinos, L.G.; Salgado-Jiménez, T.; Bandala-Sánchez, M.; Nava-Balanzar, L.; Hernández-Alvarado, R.; Cruz-Ledesma, J.A. Modelling, Design and Robust Control of a Remotely Operated Underwater Vehicle. Int. J. Adv. Robot. Syst. 2014, 11, 1. [Google Scholar] [CrossRef] [Green Version]
- Davila, J.; Fridman, L.; Levant, A. Second-order sliding-mode observer for mechanical systems. IEEE Trans. Autom. Control 2005, 50, 1785–1789. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-García, J.; Gómez-Espinosa, A.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Cuan-Urquizo, E.; Escobedo Cabello, J.A. Experimental Validation of a Model-Free High-Order Sliding Mode Controller with Finite-Time Convergence for Trajectory Tracking of Autonomous Underwater Vehicles. Sensors 2022, 22, 488. https://doi.org/10.3390/s22020488
González-García J, Gómez-Espinosa A, García-Valdovinos LG, Salgado-Jiménez T, Cuan-Urquizo E, Escobedo Cabello JA. Experimental Validation of a Model-Free High-Order Sliding Mode Controller with Finite-Time Convergence for Trajectory Tracking of Autonomous Underwater Vehicles. Sensors. 2022; 22(2):488. https://doi.org/10.3390/s22020488
Chicago/Turabian StyleGonzález-García, Josué, Alfonso Gómez-Espinosa, Luis Govinda García-Valdovinos, Tomás Salgado-Jiménez, Enrique Cuan-Urquizo, and Jesús Arturo Escobedo Cabello. 2022. "Experimental Validation of a Model-Free High-Order Sliding Mode Controller with Finite-Time Convergence for Trajectory Tracking of Autonomous Underwater Vehicles" Sensors 22, no. 2: 488. https://doi.org/10.3390/s22020488
APA StyleGonzález-García, J., Gómez-Espinosa, A., García-Valdovinos, L. G., Salgado-Jiménez, T., Cuan-Urquizo, E., & Escobedo Cabello, J. A. (2022). Experimental Validation of a Model-Free High-Order Sliding Mode Controller with Finite-Time Convergence for Trajectory Tracking of Autonomous Underwater Vehicles. Sensors, 22(2), 488. https://doi.org/10.3390/s22020488