


Robust Lidar-Inertial Odometry with Ground Condition Perception and Optimization Algorithm for UGV


Abstract
:1. Introduction
- The novel ground condition perception and optimization algorithm is presented, and is composed of two methods. The first one is the method of ground condition perception using high-frequency inertial information and the data from the output of ESKF, and the second one is the method of the optimization of lidar points processing according to the output of the ground condition perception module.
- A framework of lidar-inertial odometry based on ESKF is proposed to estimate the state of UGVs’ poses, and the ground condition perception and optimization algorithm is well-embedded in this framework.
- Sufficient experiments were performed to validate the performance in terms of the accuracy and robustness of the system. Besides the open-source dataset, the environment with different ground conditions gathered by ourselves was also considered as part of the experimental dataset.
2. Related Work
3. Methodology
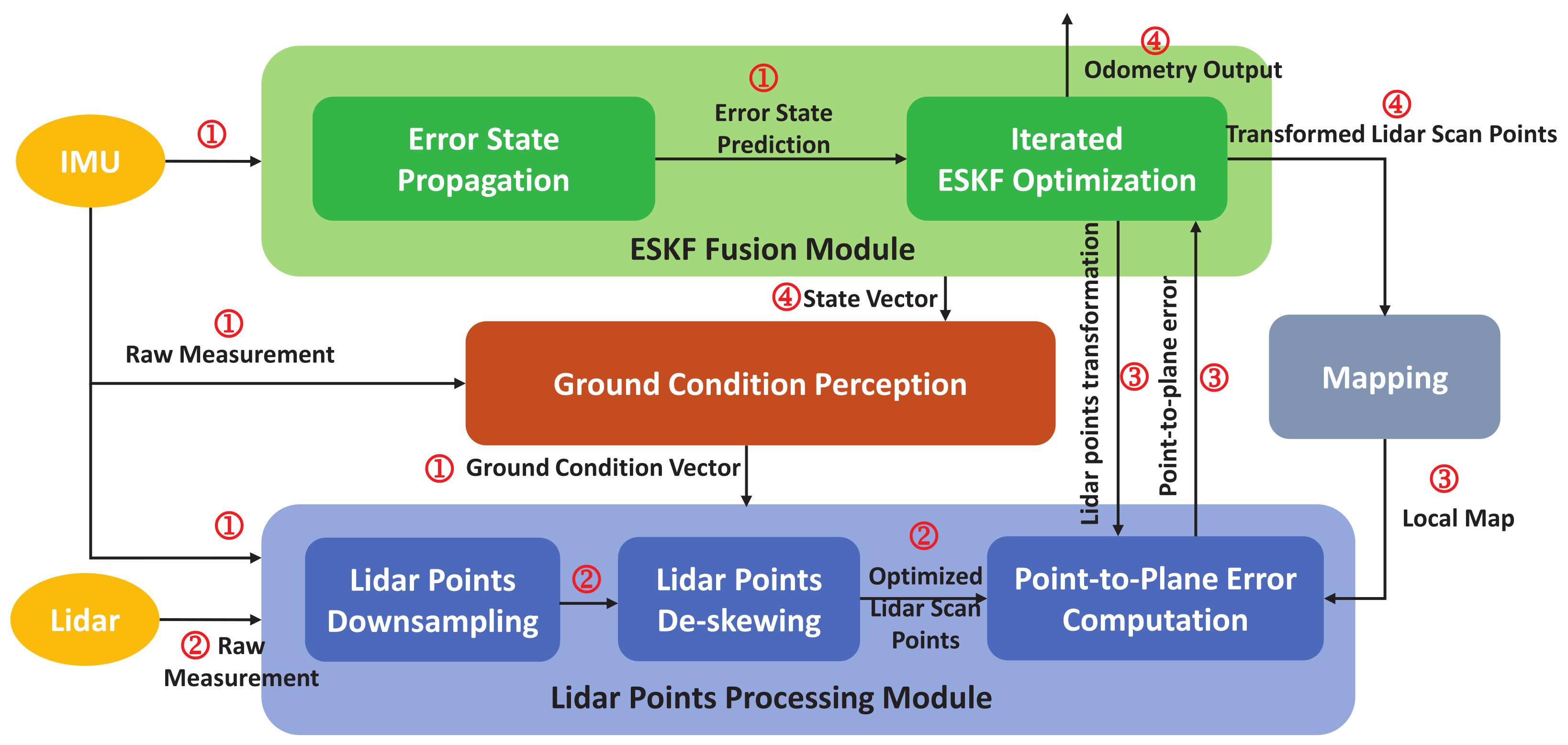
3.1. System Overview
- 1.
- The raw measurements from IMU are fed into the ESKF fusion module to propagate the error state of UGV’s poses. At the same time, the inertial measurements are utilized in the ground condition perception module to calculate the ground condition vector. Furthermore, the inertial information is cached in the lidar points processing module for lidar points de-skewing.
- 2.
- The lidar scan points from the lidar are sent to the lidar points processing module for downsampling and de-skewing, and the parameters used in the points downsampling are determined by the ground condition vectors from the ground condition perception module. The optimized lidar scan points are produced during this procedure.
- 3.
- The optimized lidar points, the local map maintained by the mapping module and the lidar points transformation from the ESKF optimization are used when performing the point-to-plane error computation, and the parameters used in this procedure are also dynamically adjusted according to the ground condition vectors from the ground condition perception module.
- 4.
- ESKF optimization utilizes the point-to-plane error and the state propagated by IMU measurements to update the error state iteratively until the convergence is achieved. The final output of the odometry is gained from the state vector maintained by ESKF. At the same time, the state vector is used to transform the lidar scan points serving the mapping module; it can also be used in the ground condition perception for correction and calibration.
3.2. Ground Condition Perception
3.3. Lidar Points Processing Module
3.3.1. Lidar Points Downsampling
3.3.2. Lidar Points De-Skewing
3.3.3. Point-to-Plane Error Computation
3.4. Mapping
3.5. ESKF Fusion Module
3.5.1. Error State Representation
3.5.2. State Propagation by IMU Measurements
3.5.3. Iterated ESKF Optimization by Lidar Measurements
4. Experiments
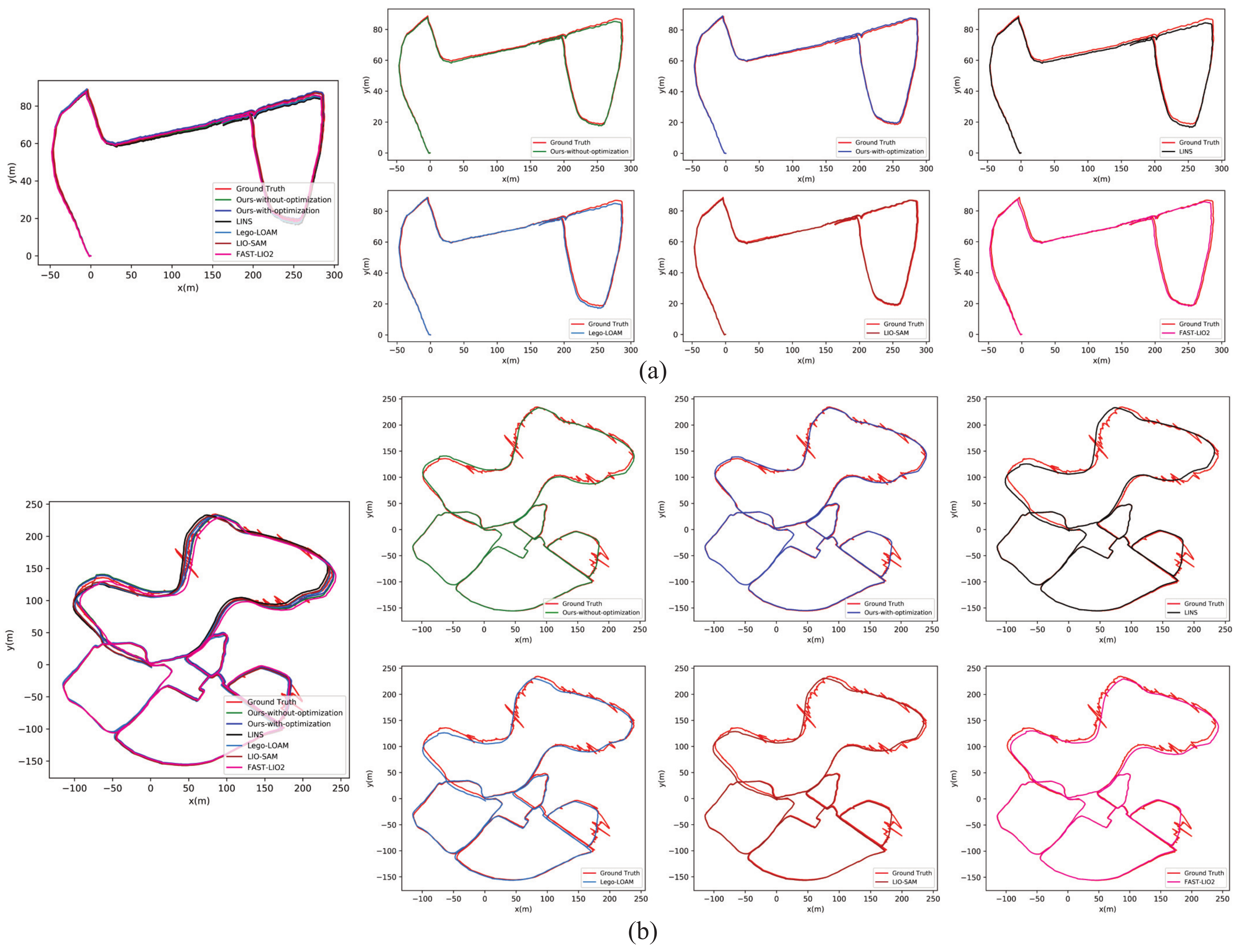
4.1. System Performance in Open Dataset
4.1.1. Visualization of the Ground Perception and Optimization Algorithm
4.1.2. Ablation and Comparison Study of the Ground Perception and Optimization Algorithm
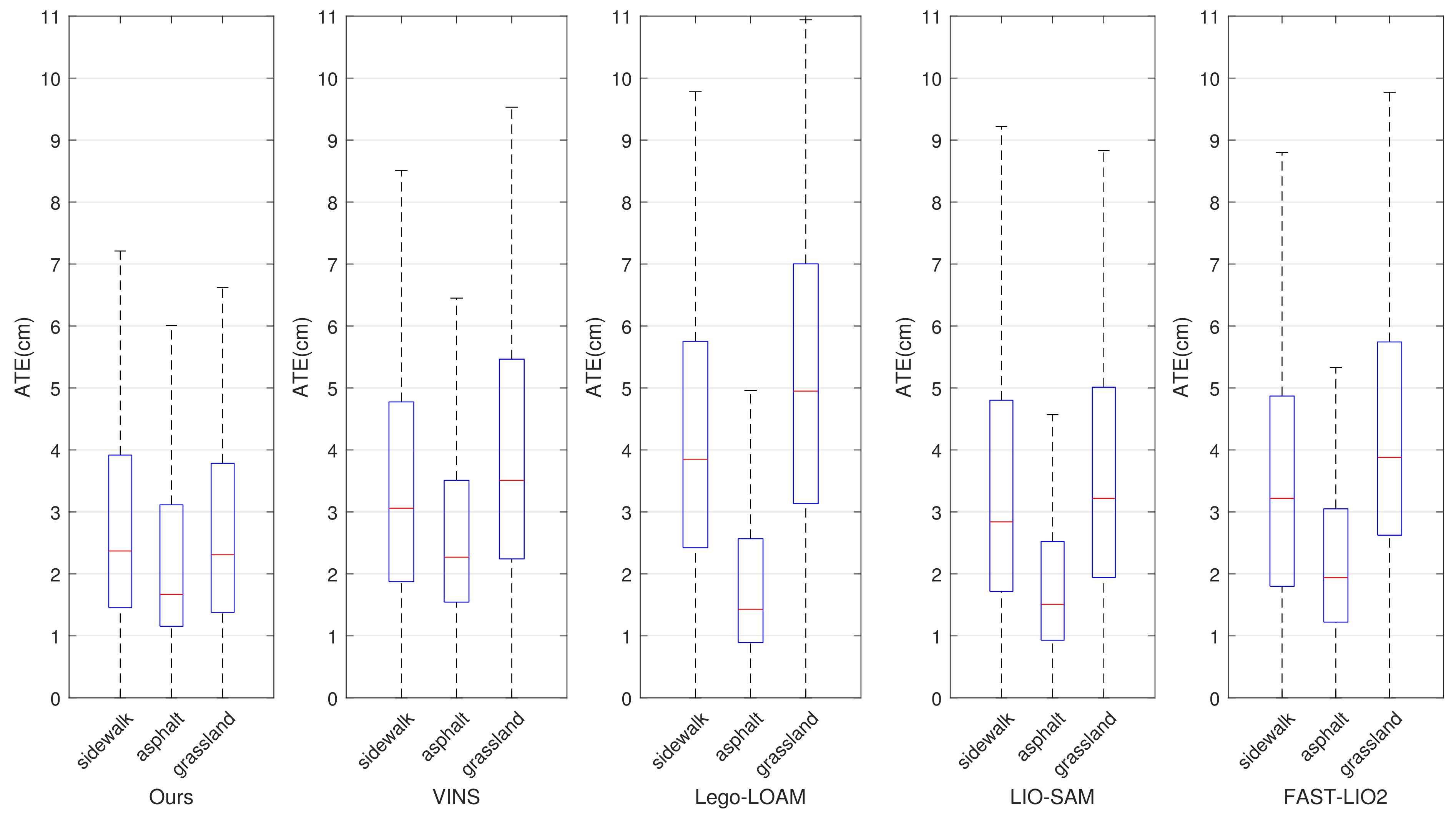
4.2. System Performance in Self-Gathered Dataset with Changing Ground Conditions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UGV | Unmanned Ground Vehicle |
| ESKF | Error-State Kalman Filter |
| IMU | Inertial Measurement Unit |
| LIO | Lidar-Inertial Odometry |
| NDT | Normal Distributions Transform |
| LINS | Lidar-Inertial State Estimator |
| Lego-LOAM | Lightweight and Ground-Optimized Lidar Odometry and Mapping |
| LIO-SAM | Lidar-Inertial Odometry via Smoothing and Mapping |
| RMSE | Root Means Square Error |
| ATE | Absolute Trajectory Error |
References
- Mohamed, S.A.; Haghbayan, M.H.; Westerlund, T.; Heikkonen, J.; Tenhunen, H.; Plosila, J. A survey on odometry for autonomous navigation systems. IEEE Access 2019, 7, 97466–97486. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, L.; Yang, J.; Cao, C.; Wang, W.; Ran, Y.; Tan, Z.; Luo, M. A Review of Multi-Sensor Fusion SLAM Systems Based on 3D LIDAR. Remote Sens. 2022, 14, 2835. [Google Scholar] [CrossRef]
- Li, Y.; Ibanez-Guzman, J. Lidar for autonomous driving: The principles, challenges, and trends for automotive lidar and perception systems. IEEE Signal Process. Mag. 2020, 37, 50–61. [Google Scholar] [CrossRef]
- Li, K.; Li, M.; Hanebeck, U.D. Towards high-performance solid-state-lidar-inertial odometry and mapping. IEEE Robot. Autom. Lett. 2021, 6, 5167–5174. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. In Proceedings of the Sensor Fusion IV: Control Paradigms and Data Structures, Boston, MA, USA, 12–15 November 1991; SPIE: Bellingham, WA USA, 1992; Volume 1611, pp. 586–606. [Google Scholar]
- Madyastha, V.; Ravindra, V.; Mallikarjunan, S.; Goyal, A. Extended Kalman filter vs. error state Kalman filter for aircraft attitude estimation. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011; p. 6615. [Google Scholar]
- Jiao, J.; Ye, H.; Zhu, Y.; Liu, M. Robust odometry and mapping for multi-lidar systems with online extrinsic calibration. IEEE Trans. Robot. 2021, 38, 351–371. [Google Scholar] [CrossRef]
- Yang, Y.; Huang, G. Observability analysis of aided ins with heterogeneous features of points, lines, and planes. IEEE Trans. Robot. 2019, 35, 1399–1418. [Google Scholar] [CrossRef]
- Yang, Y.; Geneva, P.; Eckenhoff, K.; Huang, G. Degenerate motion analysis for aided ins with online spatial and temporal sensor calibration. IEEE Robot. Autom. Lett. 2019, 4, 2070–2077. [Google Scholar] [CrossRef]
- Zuo, X.; Geneva, P.; Lee, W.; Liu, Y.; Huang, G. Lic-fusion: Lidar-inertial-camera odometry. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 5848–5854. [Google Scholar]
- Qin, T.; Li, P.; Shen, S. Vins-mono: A robust and versatile monocular visual-inertial state estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef]
- Mourikis, A.I.; Roumeliotis, S.I. A Multi-State Constraint Kalman Filter for Vision-aided Inertial Navigation. In Proceedings of the ICRA, Roma, Italy, 10–14 April 2007; Volume 2, p. 6. [Google Scholar]
- Lv, J.; Xu, J.; Hu, K.; Liu, Y.; Zuo, X. Targetless calibration of lidar-imu system based on continuous-time batch estimation. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 9968–9975. [Google Scholar]
- Guanbei, W.; Guirong, Z. LIDAR/IMU calibration based on ego-motion estimation. In Proceedings of the 2020 4th CAA International Conference on Vehicular Control and Intelligence (CVCI), Hangzhou, China, 18–20 December 2020; pp. 109–112. [Google Scholar]
- Zuo, X.; Yang, Y.; Geneva, P.; Lv, J.; Liu, Y.; Huang, G.; Pollefeys, M. Lic-fusion 2.0: Lidar-inertial-camera odometry with sliding-window plane-feature tracking. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5112–5119. [Google Scholar]
- Zhang, J.; Kaess, M.; Singh, S. On degeneracy of optimization-based state estimation problems. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 809–816. [Google Scholar]
- Qin, C.; Ye, H.; Pranata, C.E.; Han, J.; Zhang, S.; Liu, M. Lins: A lidar-inertial state estimator for robust and efficient navigation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8899–8906. [Google Scholar]
- Kim, Y.; Kim, A. On the uncertainty propagation: Why uncertainty on lie groups preserves monotonicity? In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3425–3432. [Google Scholar]
- Xu, W.; Zhang, F. Fast-lio: A fast, robust lidar-inertial odometry package by tightly-coupled iterated kalman filter. IEEE Robot. Autom. Lett. 2021, 6, 3317–3324. [Google Scholar] [CrossRef]
- Lin, J.; Zheng, C.; Xu, W.; Zhang, F. R2 LIVE: A Robust, Real-Time, LiDAR-Inertial-Visual Tightly-Coupled State Estimator and Mapping. IEEE Robot. Autom. Lett. 2021, 6, 7469–7476. [Google Scholar] [CrossRef]
- Xu, W.; Cai, Y.; He, D.; Lin, J.; Zhang, F. Fast-lio2: Fast direct lidar-inertial odometry. IEEE Trans. Robot. 2022, 38, 2053–2073. [Google Scholar] [CrossRef]
- Bai, C.; Xiao, T.; Chen, Y.; Wang, H.; Zhang, F.; Gao, X. Faster-LIO: Lightweight Tightly Coupled Lidar-Inertial Odometry Using Parallel Sparse Incremental Voxels. IEEE Robot. Autom. Lett. 2022, 7, 4861–4868. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. Lio-sam: Tightly-coupled lidar inertial odometry via smoothing and mapping. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5135–5142. [Google Scholar]
- Dellaert, F.; Kaess, M. Factor graphs for robot perception. Found. Trends Robot. 2017, 6, 1–139. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B. Lego-loam: Lightweight and ground-optimized lidar odometry and mapping on variable terrain. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4758–4765. [Google Scholar]
- Koide, K.; Miura, J.; Menegatti, E. A portable three-dimensional LIDAR-based system for long-term and wide-area people behavior measurement. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419841532. [Google Scholar] [CrossRef]
- Su, Y.; Wang, T.; Shao, S.; Yao, C.; Wang, Z. GR-LOAM: LiDAR-based sensor fusion SLAM for ground robots on complex terrain. Robot. Auton. Syst. 2021, 140, 103759. [Google Scholar] [CrossRef]
- Wei, X.; Lv, J.; Sun, J.; Pu, S. Ground-SLAM: Ground Constrained LiDAR SLAM for Structured Multi-Floor Environments. arXiv 2021, arXiv:2103.03713. [Google Scholar]
- Seo, D.U.; Lim, H.; Lee, S.; Myung, H. PaGO-LOAM: Robust Ground-Optimized LiDAR Odometry. arXiv 2022, arXiv:2206.00266. [Google Scholar]
- Magnusson, M. The Three-Dimensional Normal-Distributions Transform: An Efficient Representation for Registration, Surface Analysis, and Loop Detection. Ph.D. Thesis, Örebro Universitet, Örebro, Sweden, 2009. [Google Scholar]
- Behley, J.; Stachniss, C. Efficient Surfel-Based SLAM using 3D Laser Range Data in Urban Environments. In Proceedings of the Robotics: Science and Systems, Pittsburgh, PA, USA, 26–30 June 2018; Volume 2018, p. 59. [Google Scholar]
- Yokozuka, M.; Koide, K.; Oishi, S.; Banno, A. LiTAMIN: LiDAR-based tracking and mapping by stabilized ICP for geometry approximation with normal distributions. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5143–5150. [Google Scholar]
- Yokozuka, M.; Koide, K.; Oishi, S.; Banno, A. LiTAMIN2: Ultra light lidar-based slam using geometric approximation applied with KL-divergence. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 11619–11625. [Google Scholar]
- Shan, T.; Englot, B.; Ratti, C.; Rus, D. Lvi-sam: Tightly-coupled lidar-visual-inertial odometry via smoothing and mapping. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 5692–5698. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Small-Scale Dataset | ||||||
|---|---|---|---|---|---|---|
| Our Method without Optimization | Our Method with Optimization | LINS | Lego-LOAM | LIO-SAM | FAST-LIO2 | |
| Estimated length (m) | 661.76 | 661.32 | 661.08 | 661.25 | 661.11 | 661.53 |
| Translational RMSE (%) | 1.49 | 1.21 | 2.34 | 1.57 | 1.12 | 1.52 |
| Large-Scale Dataset | ||||||
| Our Method without Optimization | Our Method with Optimization | LINS | Lego-LOAM | LIO-SAM | FAST-LIO2 | |
| Estimated length (m) | 4668.22 | 4670.55 | 4668.96 | 4677.23 | 4670.73 | 4667.81 |
| Translational RMSE (%) | 3.78 | 2.80 | 3.95 | 8.96 | 3.54 | 3.87 |
| End-to-end translational error (m) | 5.25 | 4.22 | 7.37 | 10.44 | 5.48 | 6.54 |
| End-to-end rotational error (m) | 3.43 | 2.07 | 4.80 | 5.17 | 2.18 | 3.66 |
| Self-Gathered Dataset | |||||
|---|---|---|---|---|---|
| Our Method | LINS | Lego-LOAM | LIO-SAM | FAST-LIO2 | |
| Estimated length (m) | 1517.68 | 1518.24 | 1518.33 | 1517.14 | 1517.96 |
| Translational RMSE (%) | 2.60 | 3.61 | 3.93 | 2.85 | 3.22 |
| End-to-end translational error (m) | 3.21 | 3.94 | 4.73 | 4.28 | 4.01 |
| End-to-end rotational error (m) | 2.19 | 3.87 | 3.32 | 2.27 | 2.56 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Zhang, Y.; Shi, J.; Long, L.; Lu, Z. Robust Lidar-Inertial Odometry with Ground Condition Perception and Optimization Algorithm for UGV. Sensors 2022, 22, 7424. https://doi.org/10.3390/s22197424
Zhao Z, Zhang Y, Shi J, Long L, Lu Z. Robust Lidar-Inertial Odometry with Ground Condition Perception and Optimization Algorithm for UGV. Sensors. 2022; 22(19):7424. https://doi.org/10.3390/s22197424
Chicago/Turabian StyleZhao, Zixu, Yucheng Zhang, Jinglin Shi, Long Long, and Zaiwang Lu. 2022. "Robust Lidar-Inertial Odometry with Ground Condition Perception and Optimization Algorithm for UGV" Sensors 22, no. 19: 7424. https://doi.org/10.3390/s22197424
APA StyleZhao, Z., Zhang, Y., Shi, J., Long, L., & Lu, Z. (2022). Robust Lidar-Inertial Odometry with Ground Condition Perception and Optimization Algorithm for UGV. Sensors, 22(19), 7424. https://doi.org/10.3390/s22197424