
Measuring Roadway Lane Widths Using Connected Vehicle Sensor Data


Abstract
:1. Introduction
2. Background
3. Measuring Lane Widths with Connected Vehicle Data
4. Motivation
5. Objective
5.1. Measuring Lane Widths with Mobile Mapping Units
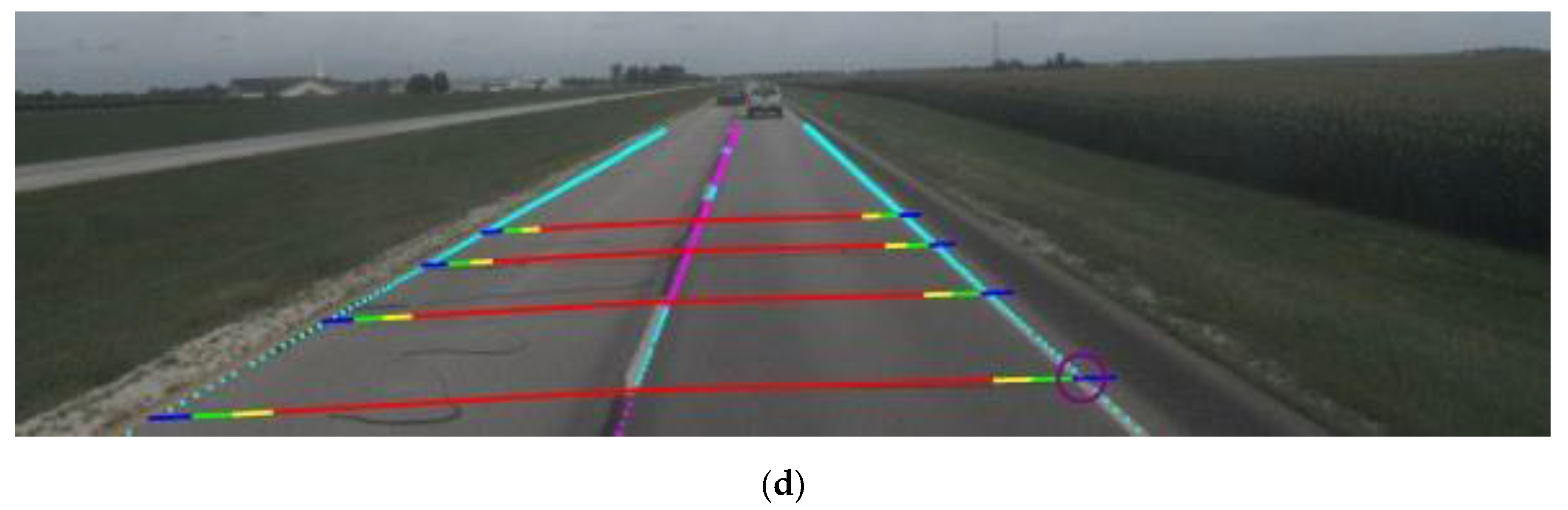
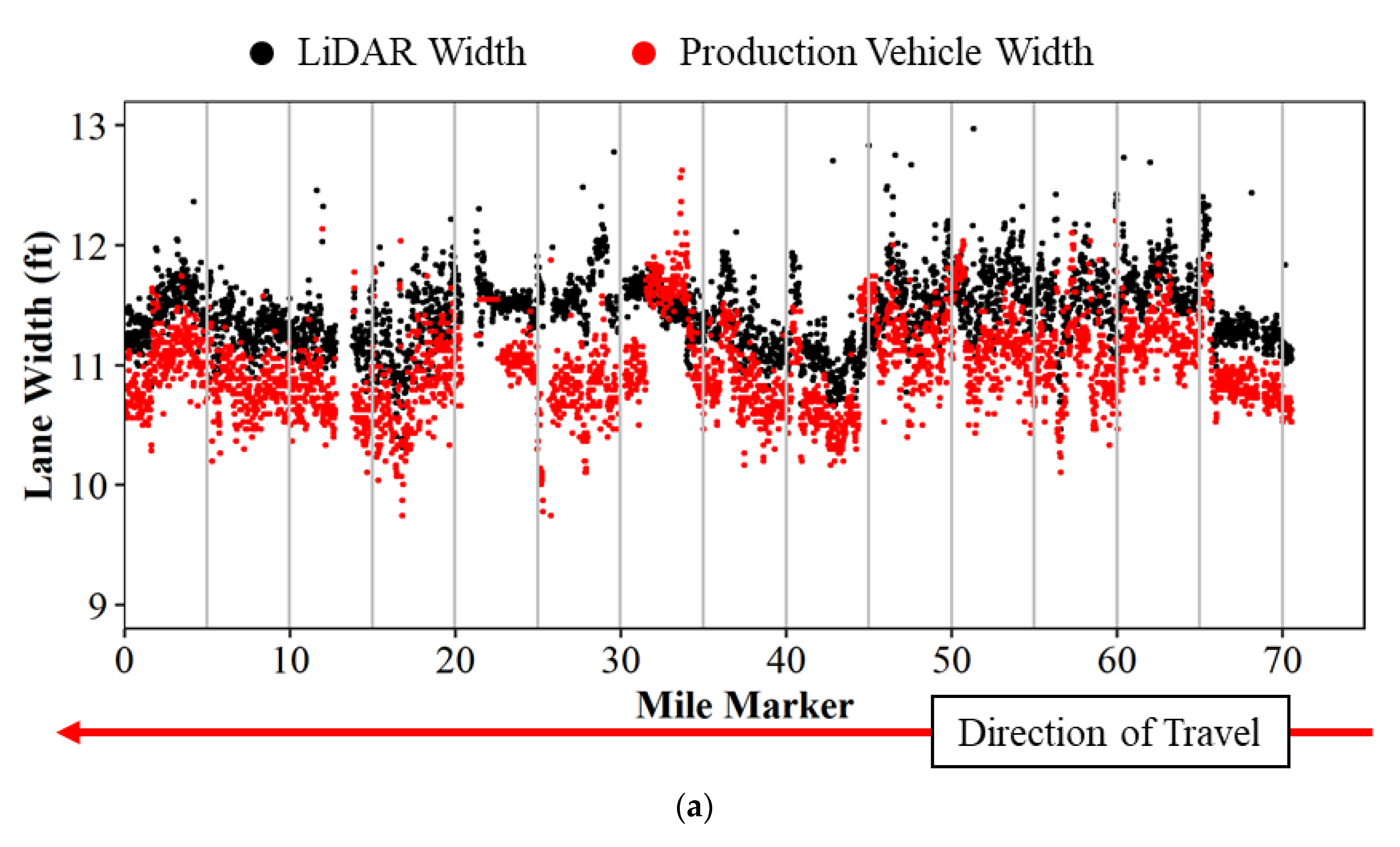
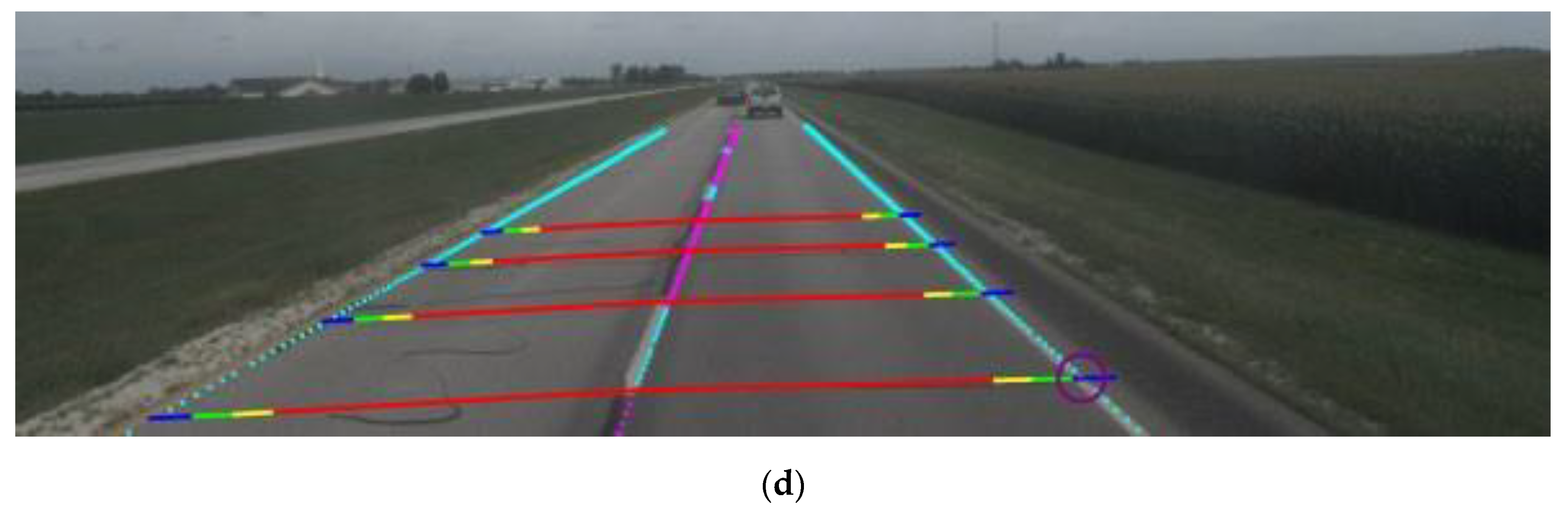
5.2. Measuring Lane Widths with Production Vehicles
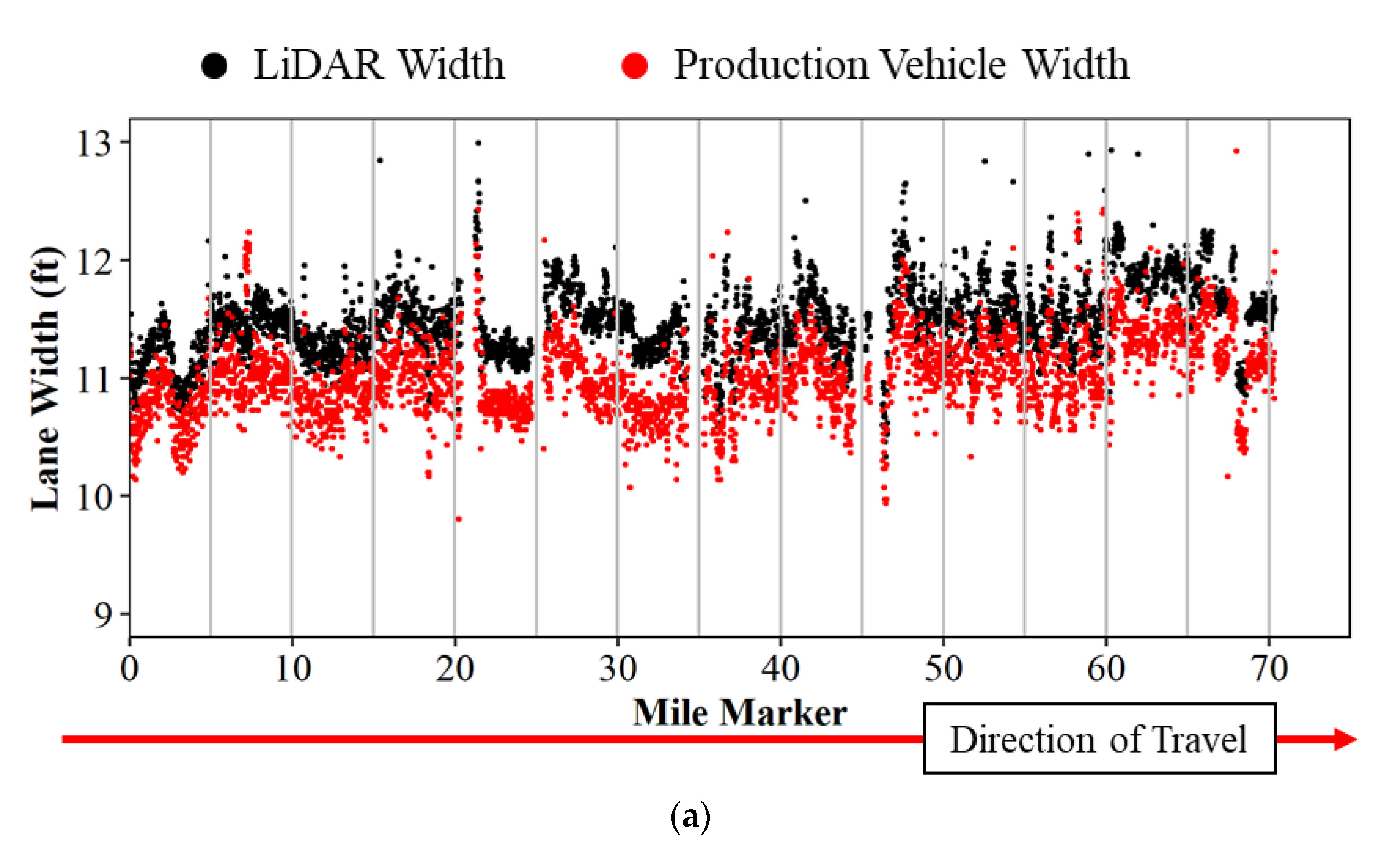
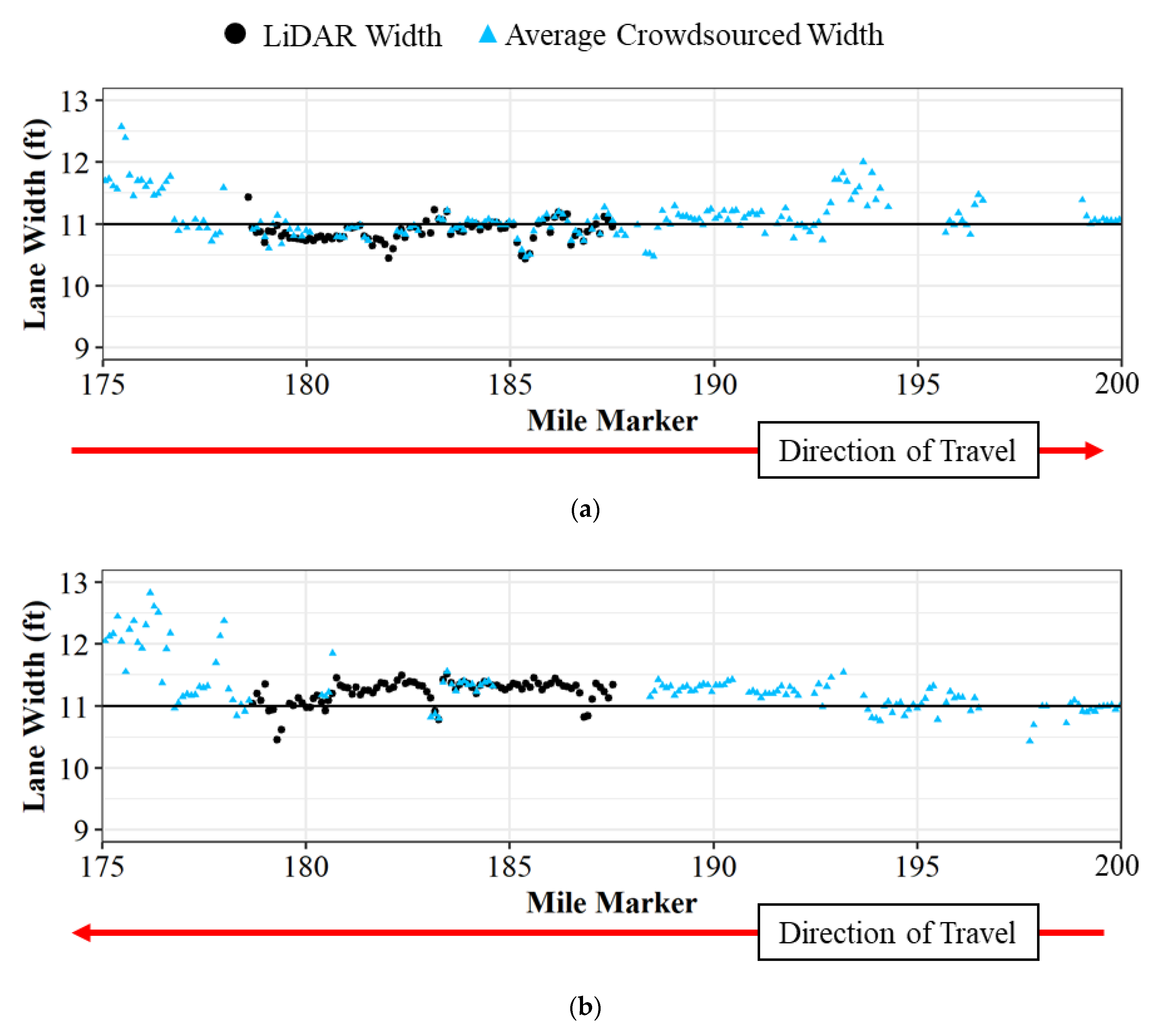
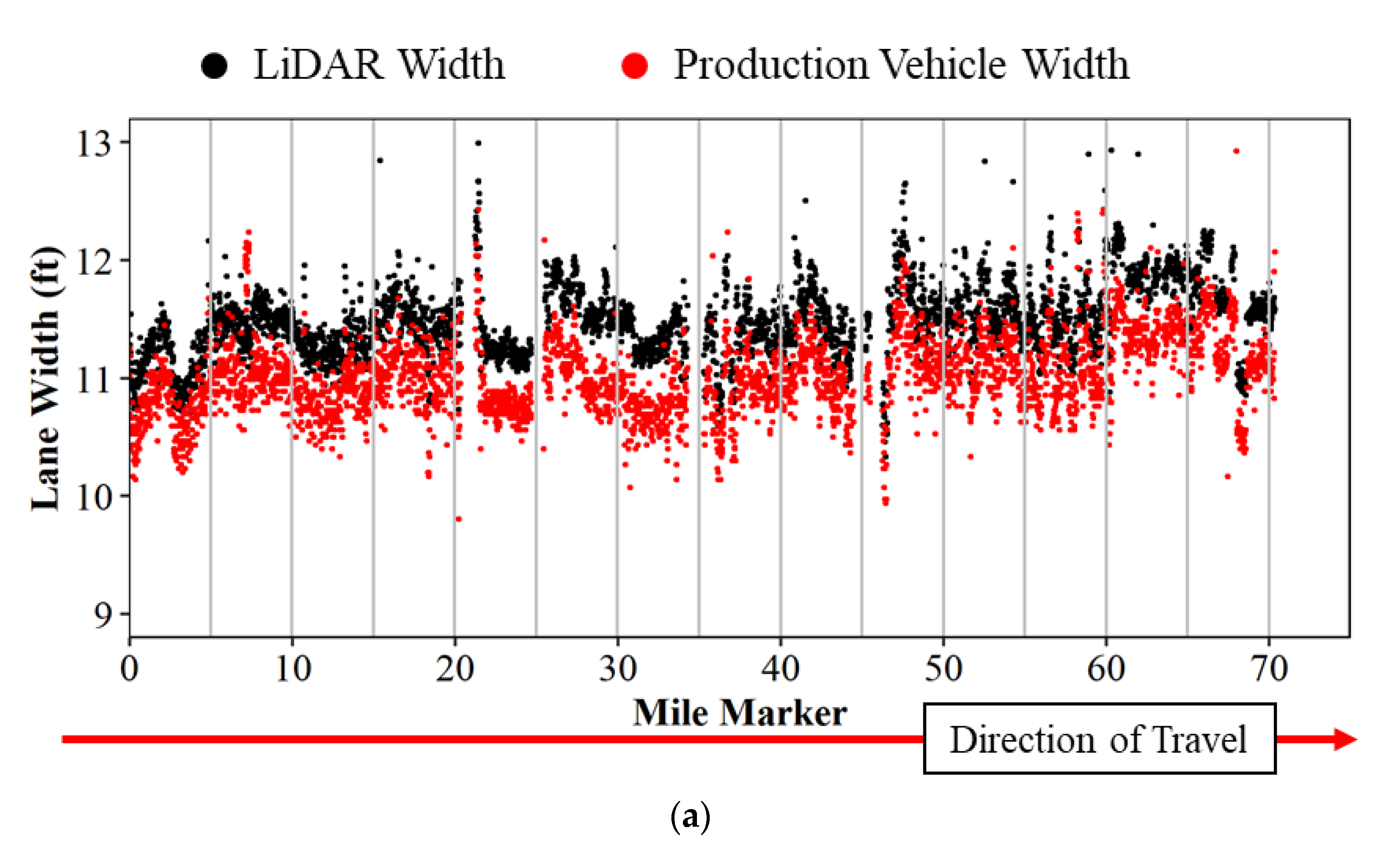
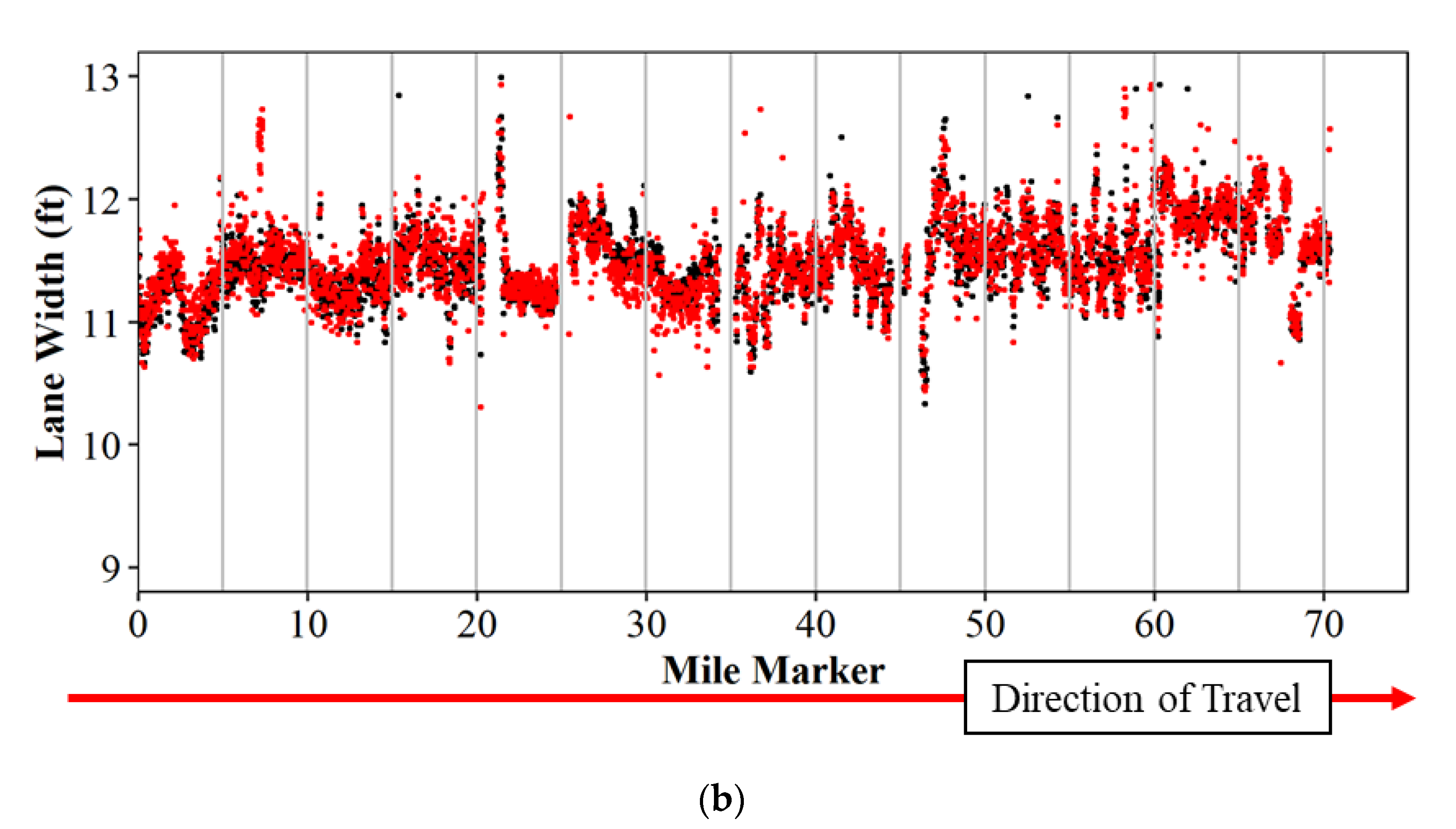
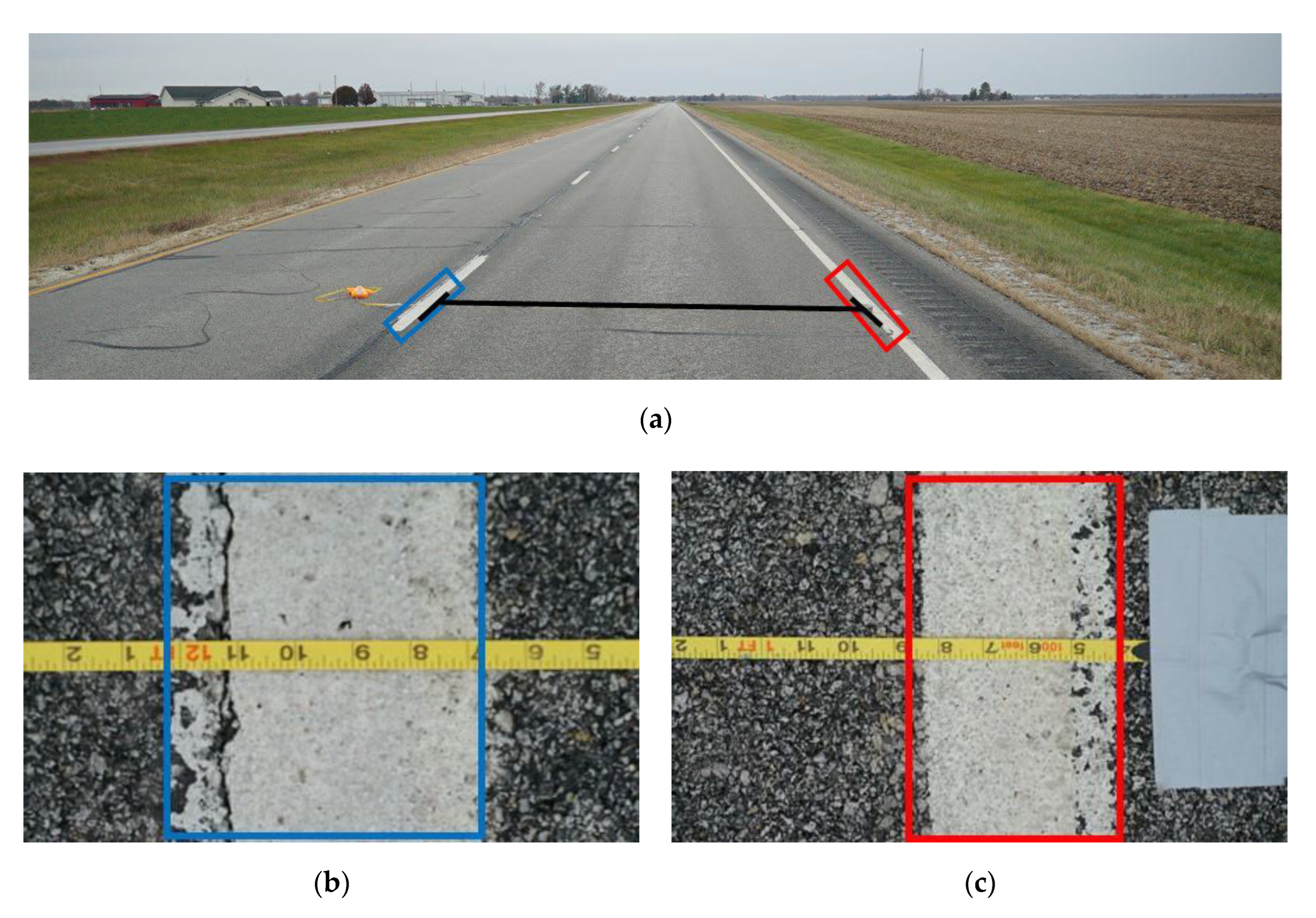
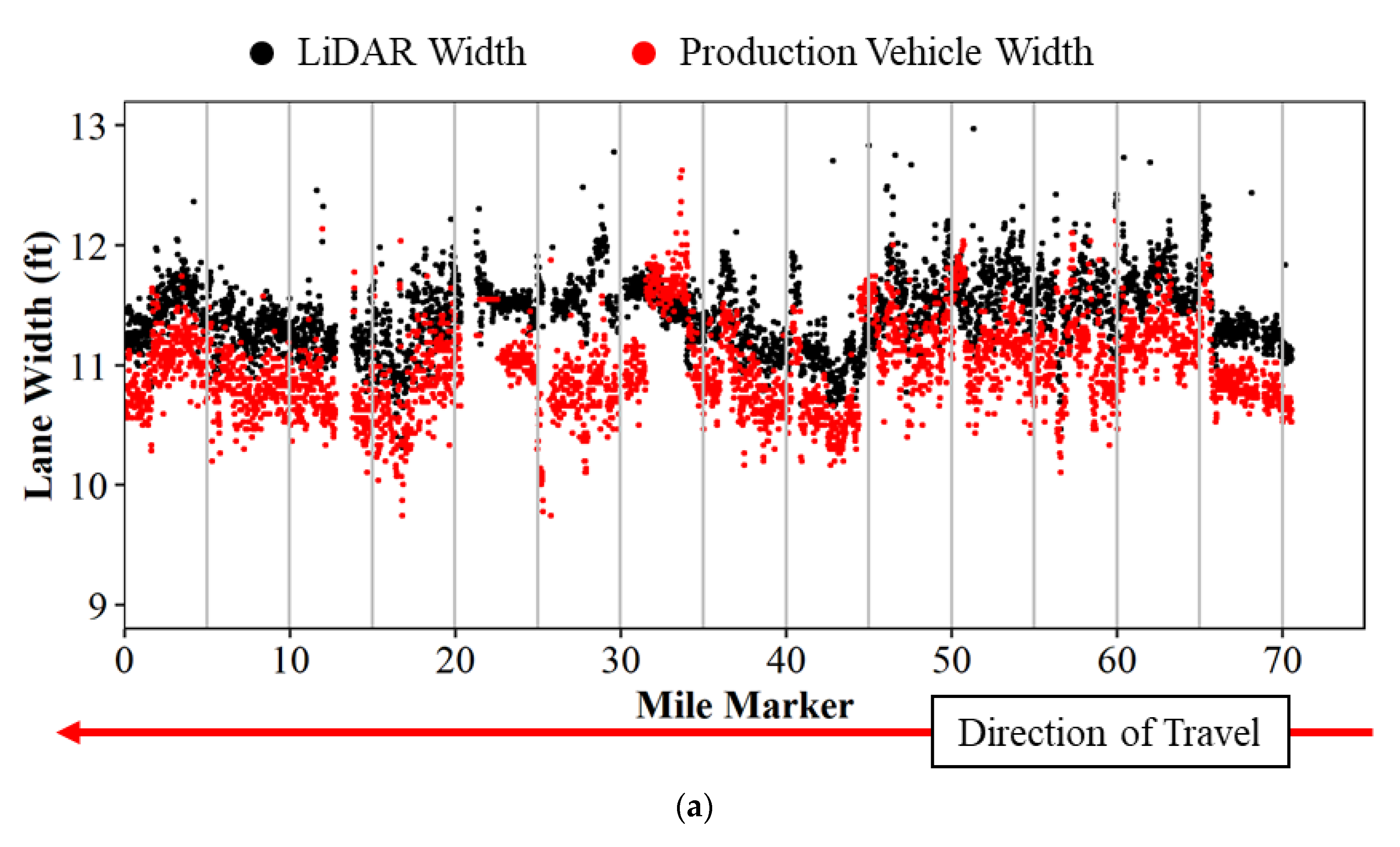
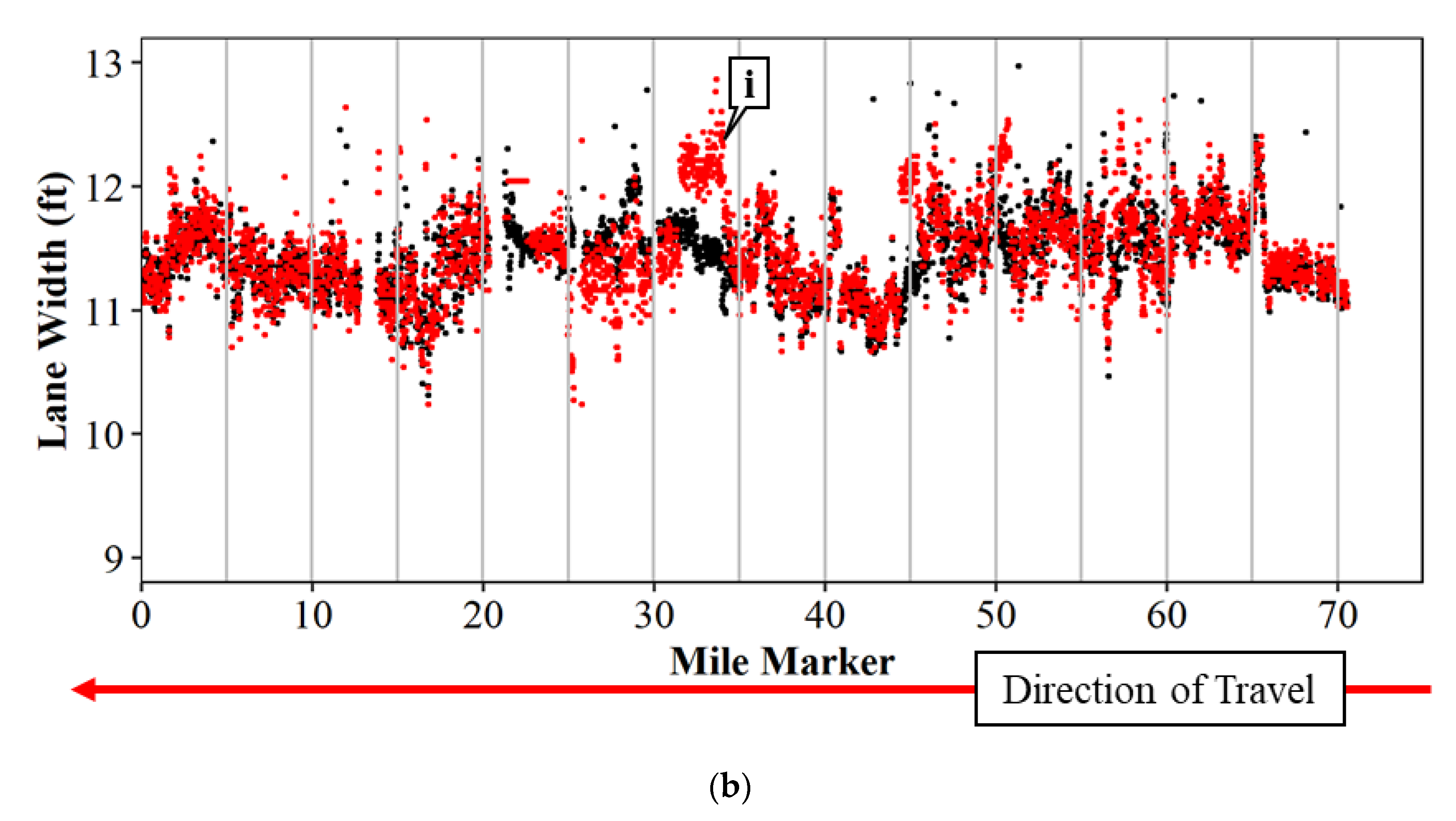
6. Evaluation Protocol—Validation of Camera Detection Lane Widths Using LiDAR
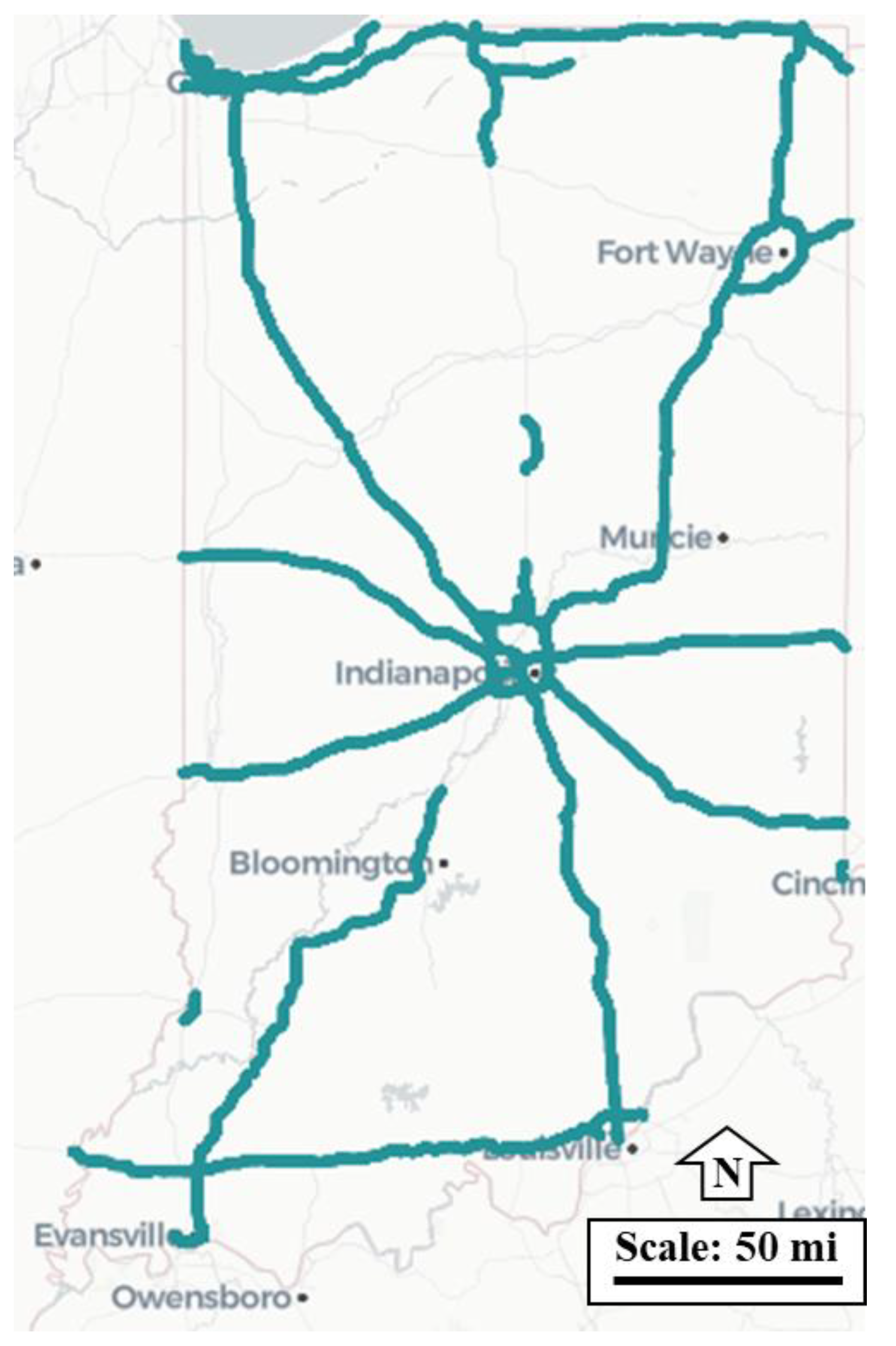
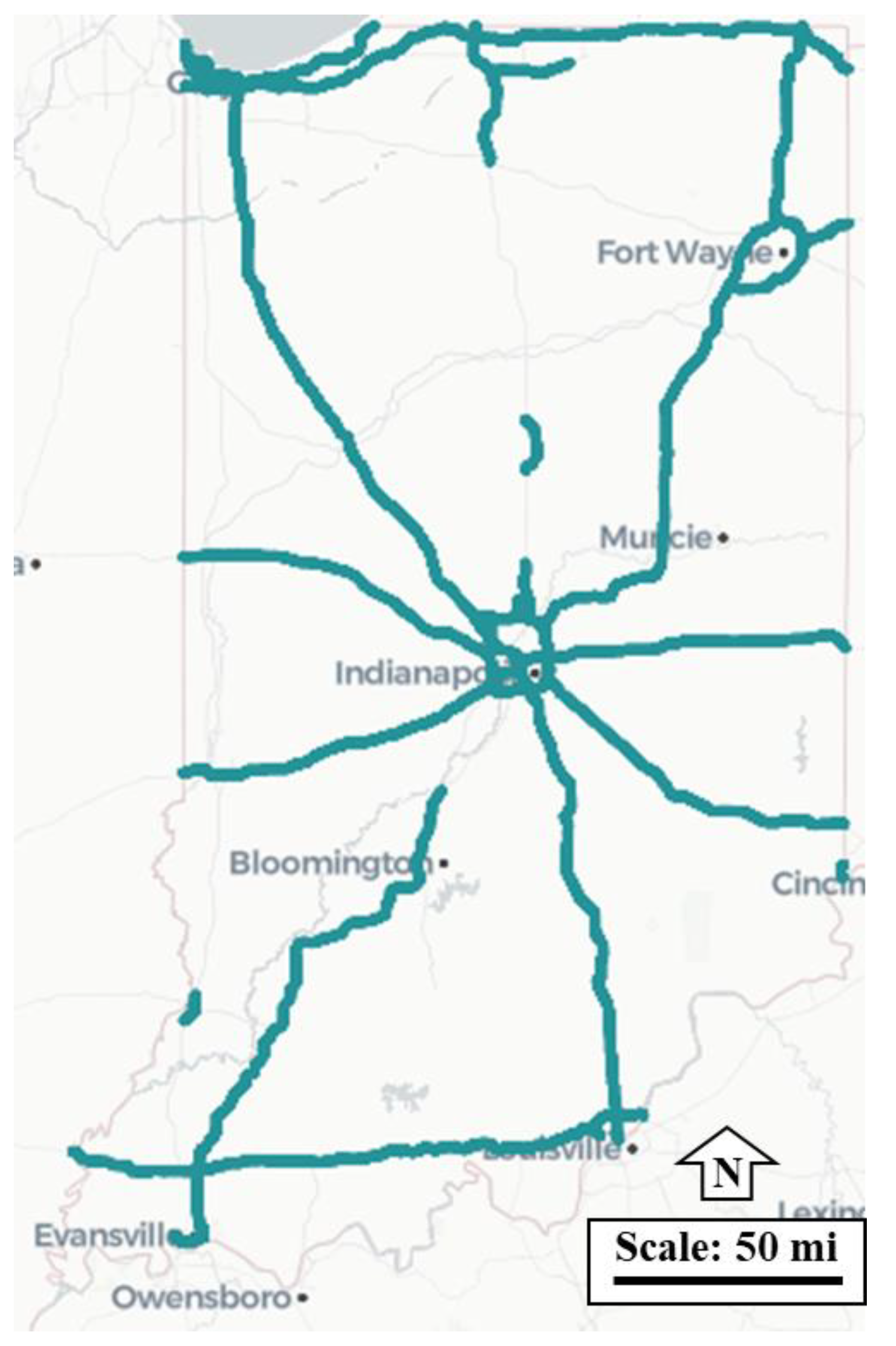
7. Scalability
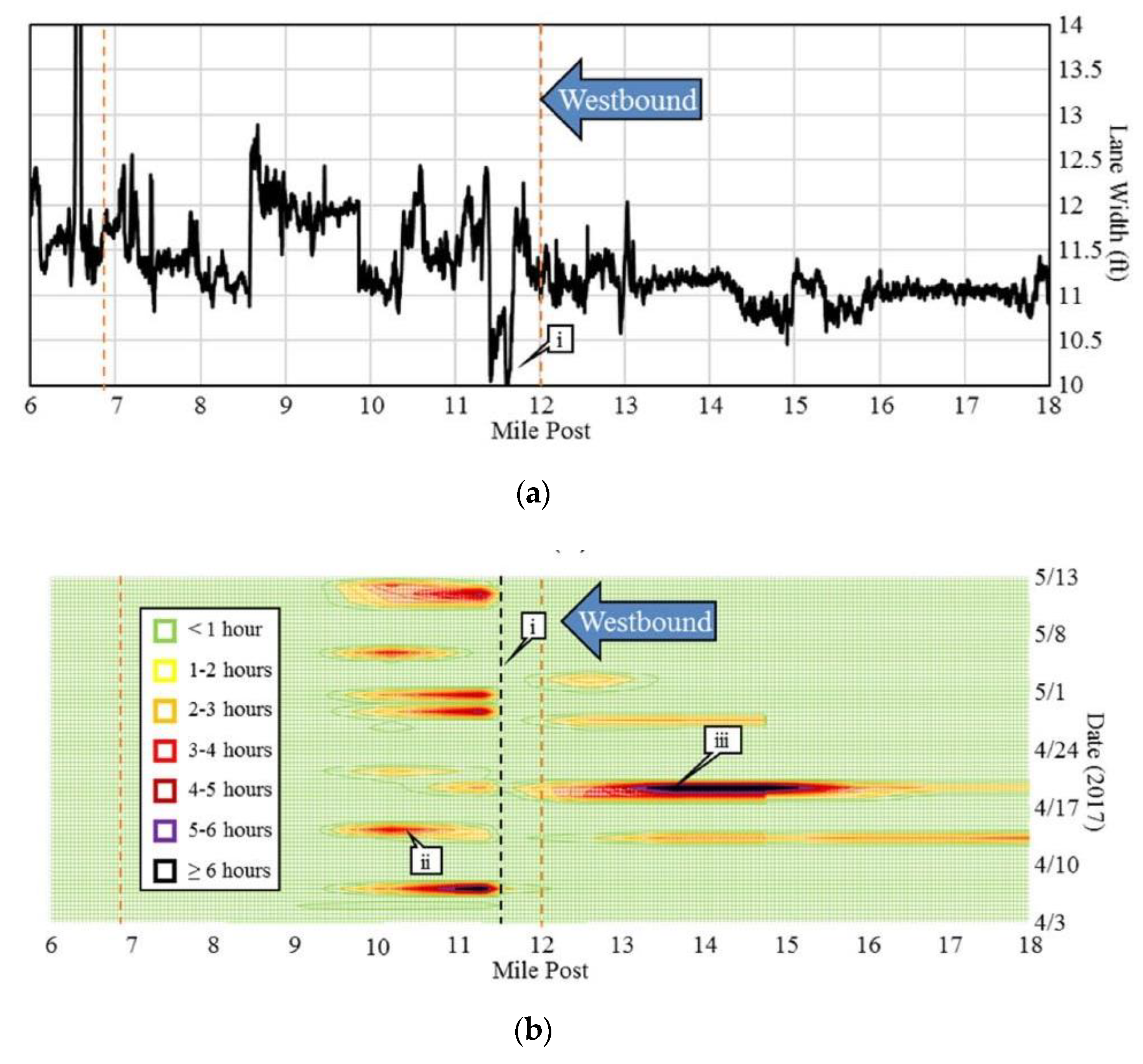
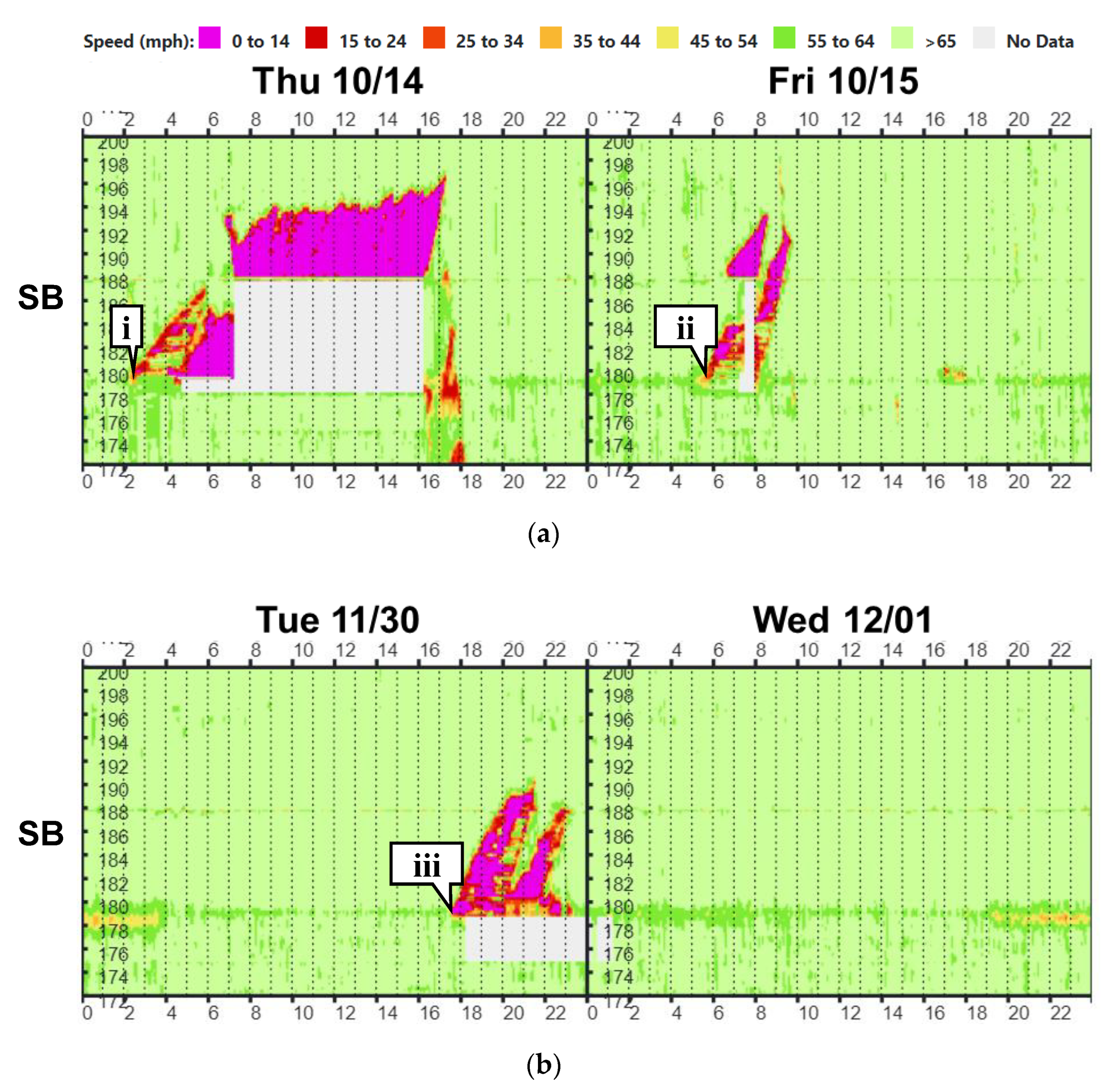
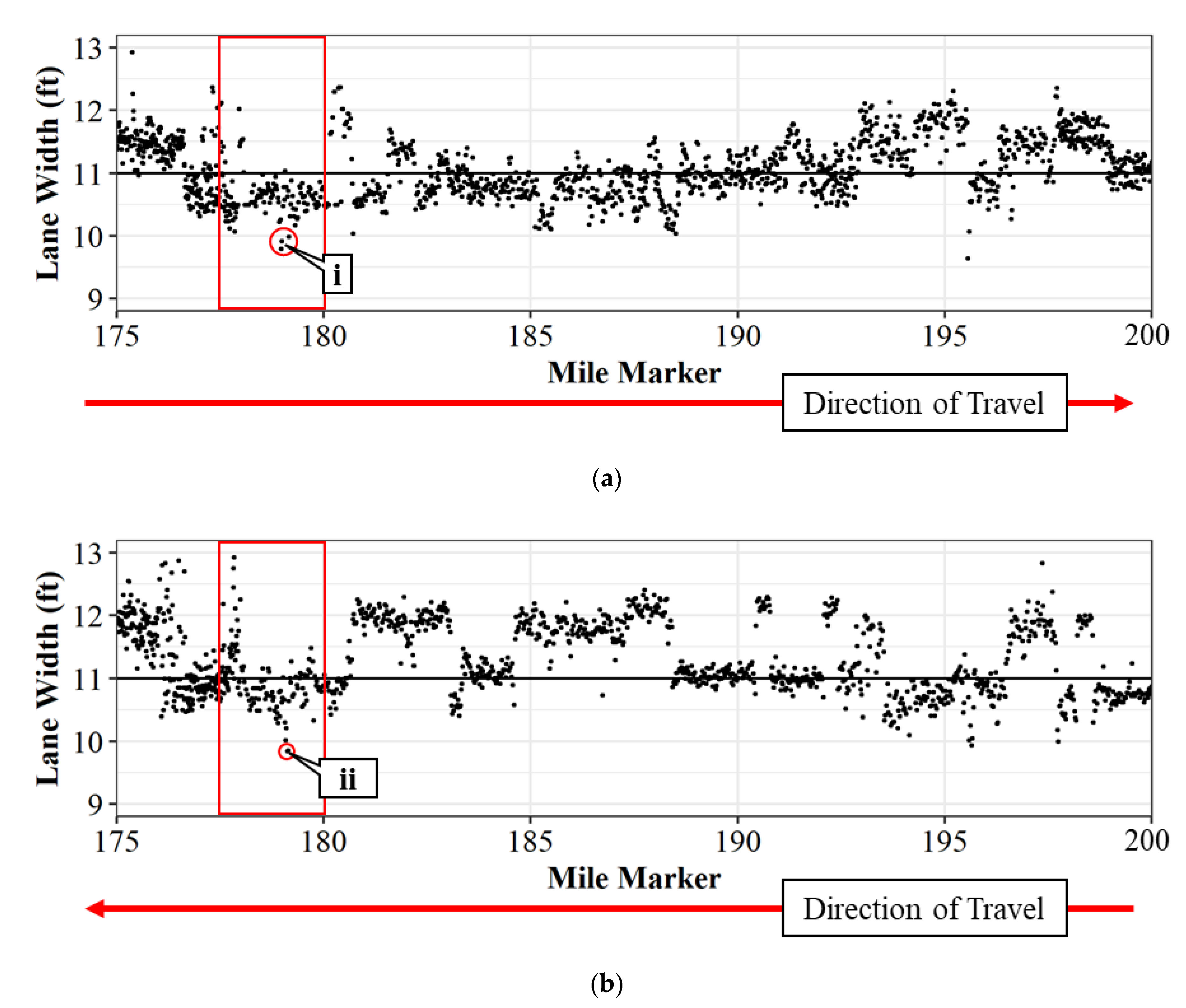
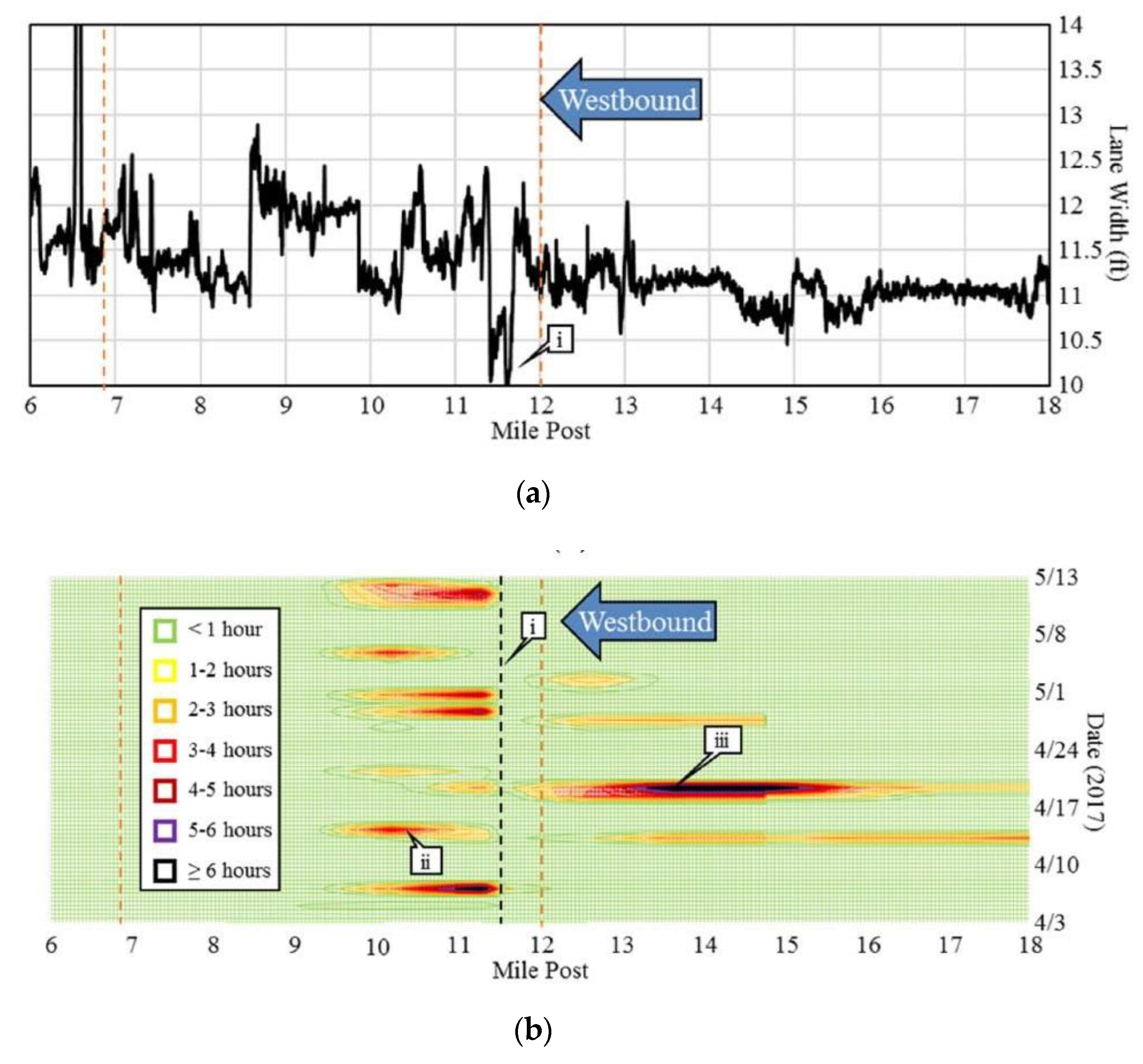
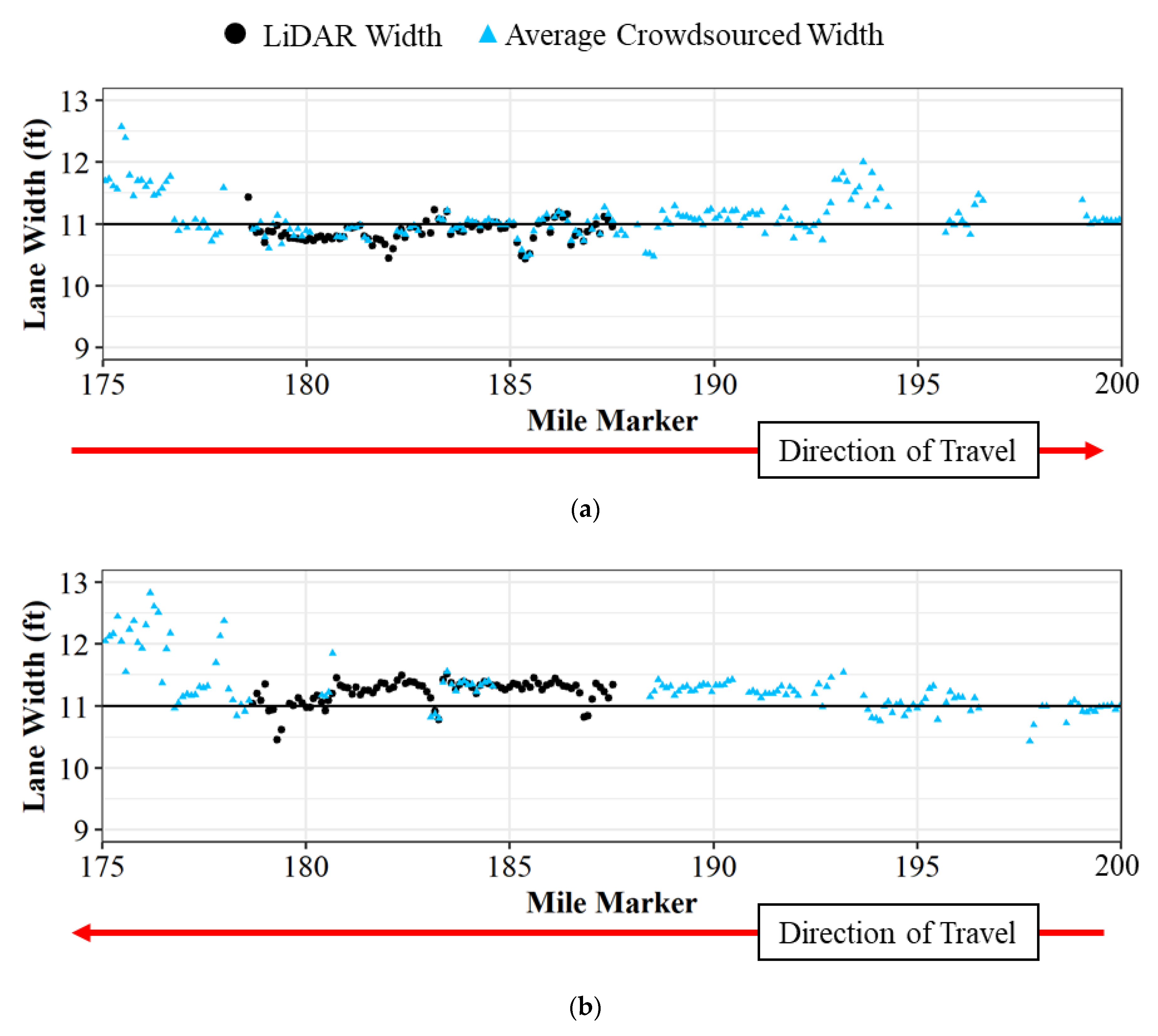
8. Identifying Lane Width Outliers with Connected Vehicle Data
9. Conclusions and Recommendations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- US Department of Energy. Alternative Fuels Data Center: Maps and Data-Annual Vehicle Miles Traveled in the United States. Available online: https://afdc.energy.gov/data/10315 (accessed on 7 June 2022).
- Transportation, US Department of Transportation. FHWA Work Zone Facts and Statistics. Available online: https://ops.fhwa.dot.gov/wz/resources/facts_stats.htm (accessed on 7 June 2022).
- Chen, S.; Saeed, T.U.; Alinizzi, M.; Lavrenz, S.; Labi, S. Safety sensitivity to roadway characteristics: A comparison across highway classes. Accid. Anal. Prev. 2018, 123, 39–50. [Google Scholar] [CrossRef] [PubMed]
- Zegeer, C.V.; Deacon, J.A. Effect of Lane Width, Shoulder Width, and Shoulder Type on Highway Safety. State Art Rep. 1987, 6, 1–21. Available online: https://trid.trb.org/view/302636 (accessed on 7 June 2022).
- US Department of Transportation. Mitigation Strategies for Design Exceptions-Safety. Available online: https://safety.fhwa.dot.gov/geometric/pubs/mitigationstrategies/chapter3/3_lanewidth.cfm (accessed on 7 June 2022).
- Mekker, M.M.; Lin, Y.-J.; Elbahnasawy, M.K.I.; Shamseldin, T.S.A.; Li, H.; Habib, A.F.; Bullock, D.M. Application of LiDAR and Connected Vehicle Data to Evaluate the Impact of Work Zone Geometry on Freeway Traffic Operations. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 1–13. [Google Scholar] [CrossRef]
- Indiana Design Manual. In Indiana Department of Transportation 2013 Design Manual. pp. 44–46. Available online: https://www.in.gov/dot/div/contracts/design/Part%205/Current%20Version%20of%20Chapter%20503%20-%20Traffic%20Maintenance.pdf (accessed on 7 March 2022).
- Mekker, M.M.; Remias, S.M.; McNamara, M.L.; Bullock, D.M. Characterizing Interstate Crash Rates Based on Traffic Con-gestion Using Probe Vehicle Data. 2016, Volume 2051, pp. 1–20. Available online: https://docs.lib.purdue.edu/cgi/viewcontent.cgi?article=1030&context=jtrpaffdocs (accessed on 7 March 2022).
- Nguyen, B.; Famiglietti, N.; Khan, O.; Hoang, R.; Siddiqui, O.; Landerville, J. Testing and Analysis of Lane Departure Warning and Lane Keeping Assist System Response. SAE Int. J. Adv. Curr. Prac. Mobil. 2021, 3, 2301–2316. [Google Scholar] [CrossRef]
- Roh, C.-G.; Kim, J.; Im, I.-J. Letter Analysis of Impact of Rain Conditions on ADAS. Sensors 2020, 20, 6720. [Google Scholar] [CrossRef] [PubMed]
- Abu-Alrub, N.J.; Abu-Shaqra, A.D.; Rawashdeh, N.A. Compact CNN-based road weather condition detection by grayscale image band for ADAS. Auton. Syst. Sens. 2022, 12115, 183–191. [Google Scholar] [CrossRef]
- Ravi, R.; Cheng, Y.-T.; Lin, Y.-C.; Lin, Y.-J.; Hasheminasab, S.M.; Zhou, T.; Flatt, J.E.; Habib, A. Lane Width Estimation in Work Zones Using LiDAR-Based Mobile Mapping Systems. IEEE Trans. Intell. Transp. Syst. 2019, 21, 5189–5212. [Google Scholar] [CrossRef]
- Day, C.M.; McNamara, M.L.; Li, H.; Sakhare, R.S.; Desai, J.; Cox, E.D.; Horton, D.K.; Bullock, D.M. 2015 Indiana Mobility Report and Performance Measure Dashboards; Purdue University: West Lafayette, IN, USA, 2016; p. 59. [Google Scholar] [CrossRef]
- Desai, J.; Mathew, J.K.; Kim, W.; Liu, M.; Li, H.; Brooks, J.D.; Bullock, D.M. Dashboards for Real-Time Monitoring of Winter Operations Activities and After-Action Assessment. JTRP Affil. Rep. 2020. [Google Scholar] [CrossRef]
- Sakhare, R.S.; Desai, J.C.; Mahlberg, J.; Mathew, J.K.; Kim, W.; Li, H.; McGregor, J.D.; Bullock, D.M. Evaluation of the Impact of Queue Trucks with Navigation Alerts Using Connected Vehicle Data. J. Transp. Technol. 2021, 11, 561–576. [Google Scholar] [CrossRef]
- Sakhare, R.S.; Desai, J.; Li, H.; Kachler, M.A.; Bullock, D.M. Methodology for Monitoring Work Zones Traffic Operations Using Connected Vehicle Data. Safety 2022, 8, 41. [Google Scholar] [CrossRef]
- Mahlberg, J. Evaluating Vehicle Data Analytics for Assessing Road Infrastructure Functionality. Ph.D. Thesis, Purdue University Graduate School, West Lafayette, Indiana, 2020. [Google Scholar] [CrossRef]
- Mahlberg, J.A.; Sakhare, R.S.; Li, H.; Mathew, J.K.; Bullock, D.M.; Surnilla, G.C. Prioritizing Roadway Pavement Marking Maintenance Using Lane Keep Assist Sensor Data. Sensors 2021, 21, 6014. [Google Scholar] [CrossRef]
- Saldivar-Carranza, E.; Li, H.; Mathew, J.; Hunter, M.; Sturdevant, J.; Bullock, D.M. Deriving Operational Traffic Signal Performance Measures from Vehicle Trajectory Data. Transp. Res. Rec. J. Transp. Res. Board 2021, 2675, 1250–1264. [Google Scholar] [CrossRef]
- Xie, K.; Yang, D.; Ozbay, K.; Yang, H. Use of real-world connected vehicle data in identifying high-risk locations based on a new surrogate safety measure. Accid. Anal. Prev. 2018, 125, 311–319. [Google Scholar] [CrossRef] [PubMed]
- Hunter, M.; Saldivar-Carranza, E.; Desai, J.; Mathew, J.K.; Li, H.; Bullock, D.M. A Proactive Approach to Evaluating Intersection Safety Using Hard-Braking Data. J. Big Data Anal. Transp. 2021, 3, 81–94. [Google Scholar] [CrossRef]
- Cheng, Y.-T.; Patel, A.; Wen, C.; Bullock, D.; Habib, A. Intensity Thresholding and Deep Learning Based Lane Marking Extraction and Lane Width Estimation from Mobile Light Detection and Ranging (LiDAR) Point Clouds. Remote Sens. 2020, 12, 1379. [Google Scholar] [CrossRef]
- Mahlberg, J.A.; Cheng, Y.-T.; Bullock, D.M.; Habib, A. Leveraging LiDAR Intensity to Evaluate Roadway Pavement Markings. Futur. Transp. 2021, 1, 720–736. [Google Scholar] [CrossRef]
- Ravi, R.; Bullock, D.; Habib, A. Pavement Distress and Debris Detection using a Mobile Mapping System with 2D Profiler LiDAR. Transp. Res. Rec. J. Transp. Res. Board 2021, 2675, 428–438. [Google Scholar] [CrossRef]
- Lin, Y.-C.; Manish, R.; Bullock, D.; Habib, A. Comparative Analysis of Different Mobile LiDAR Mapping Systems for Ditch Line Characterization. Remote Sens. 2021, 13, 2485. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Interstate (Total Miles) | Vehicle Miles Traveled (Total Unique Trips) | |||||
|---|---|---|---|---|---|---|
| Northbound | Southbound | Eastbound | Westbound | Inner Loop | Outer Loop | |
| I-265 (14) | 355 (94) | 353 (95) | ||||
| I-465 (106) | 2822 (234) | 2849 (294) | ||||
| I-469 (62) | 199 (14) | 159 (17) | ||||
| I-64 (146) | 862 (59) | 854 (59) | ||||
| I-65 (524) | 4194 (291) | 3830 (290) | ||||
| I-69 (716) | 3727 (225) | 3560 (252) | ||||
| I-70 (314) | 2208 (163) | 1860 (144) | ||||
| I-74 (342) | 905 (105) | 947 (105) | ||||
| I-865 (10) | 77 (60) | 112 (50) | ||||
| I-94 (92) | 1671 (109) | 1239 (84) | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahlberg, J.A.; Li, H.; Cheng, Y.-T.; Habib, A.; Bullock, D.M. Measuring Roadway Lane Widths Using Connected Vehicle Sensor Data. Sensors 2022, 22, 7187. https://doi.org/10.3390/s22197187
Mahlberg JA, Li H, Cheng Y-T, Habib A, Bullock DM. Measuring Roadway Lane Widths Using Connected Vehicle Sensor Data. Sensors. 2022; 22(19):7187. https://doi.org/10.3390/s22197187
Chicago/Turabian StyleMahlberg, Justin A., Howell Li, Yi-Ting Cheng, Ayman Habib, and Darcy M. Bullock. 2022. "Measuring Roadway Lane Widths Using Connected Vehicle Sensor Data" Sensors 22, no. 19: 7187. https://doi.org/10.3390/s22197187
APA StyleMahlberg, J. A., Li, H., Cheng, Y.-T., Habib, A., & Bullock, D. M. (2022). Measuring Roadway Lane Widths Using Connected Vehicle Sensor Data. Sensors, 22(19), 7187. https://doi.org/10.3390/s22197187