

Handover Management for Drones in Future Mobile Networks—A Survey

 , ,
, ,  and
and
Abstract
:1. Introduction
- Providing a brief introduction to drone networks and connectivity requirements for drones and, more specifically, handover management in drone networks.
- Highlighting and discussing the main challenges facing the implementation of connected drones. The main focus is on the handover challenges that influence the mobility of connected drones in mobile networks, including the discussion of 6G and beyond in further detail.
- Summarizing and discussing the previous conducted research that has mostly focused on mobility management for connected drone networks, including performance, network operation, and connectivity issues.
- Discussing the key significant future research directions for connected drones. This includes mobility management, energy efficiency, machine learning, deep learning, IoT, MANETs applications, VANETs applications, new cellular technologies, security, and Mobile Edge Computing (MEC) with drones.
2. Drone Networks
2.1. Drones Applications in Mobile Networks
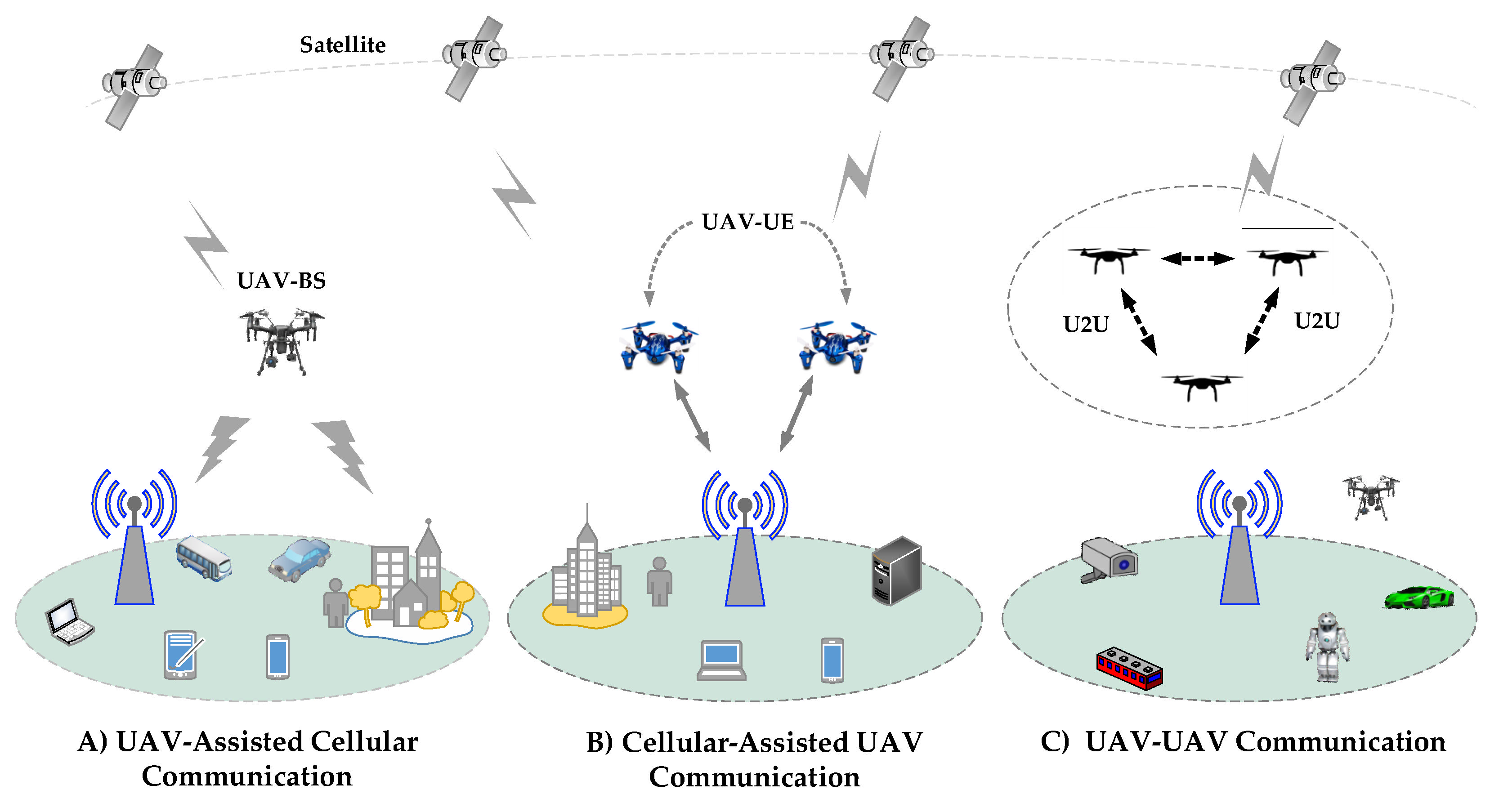
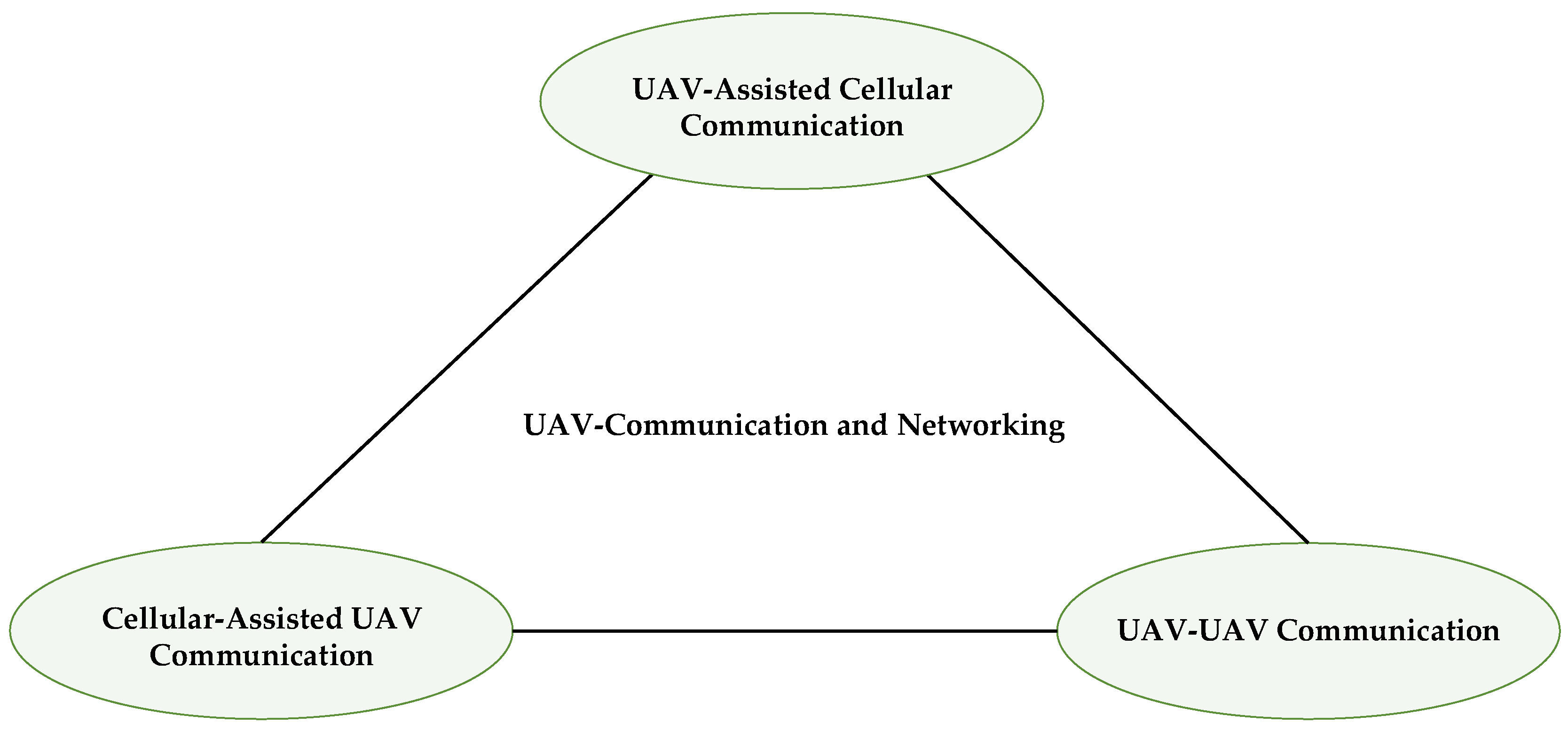
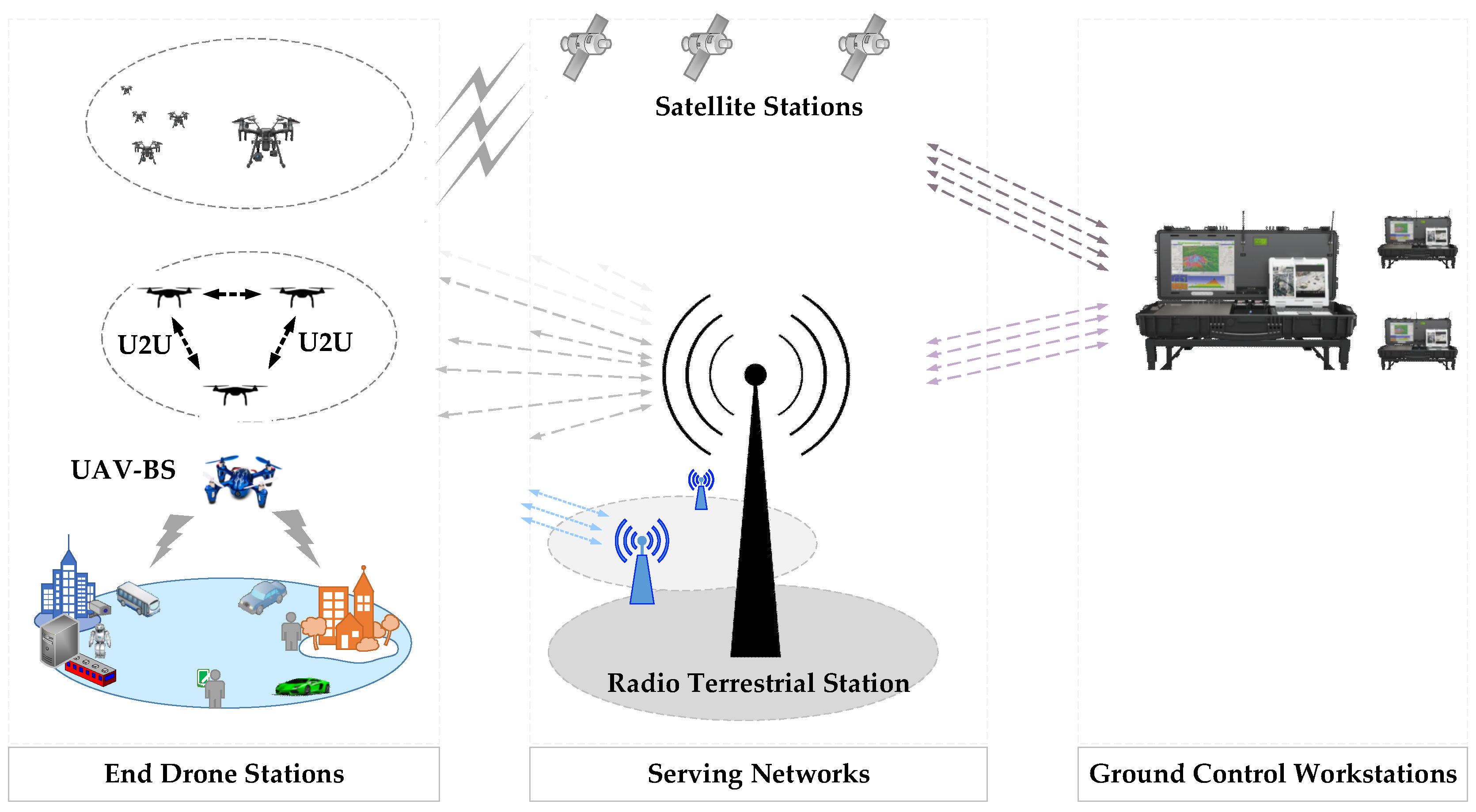
2.2. Drones’ Connectivity
2.3. Drones in 4G/5G Networks
2.4. Drones in 6G Networks
2.5. IoT-Equipped Drone Networks
3. Connectivity Requirements for Drones
3.1. High-Accuracy Positioning and Seamless Connectivity
3.2. Remote and Real-Time Control (RRC)
3.3. Multimedia Transmission
3.4. Identification and Control of Aircraft
4. Handover Management for Drone Networks
4.1. Handover in Drone Networks
4.2. Handover Decision Algorithms
4.3. Handover Types
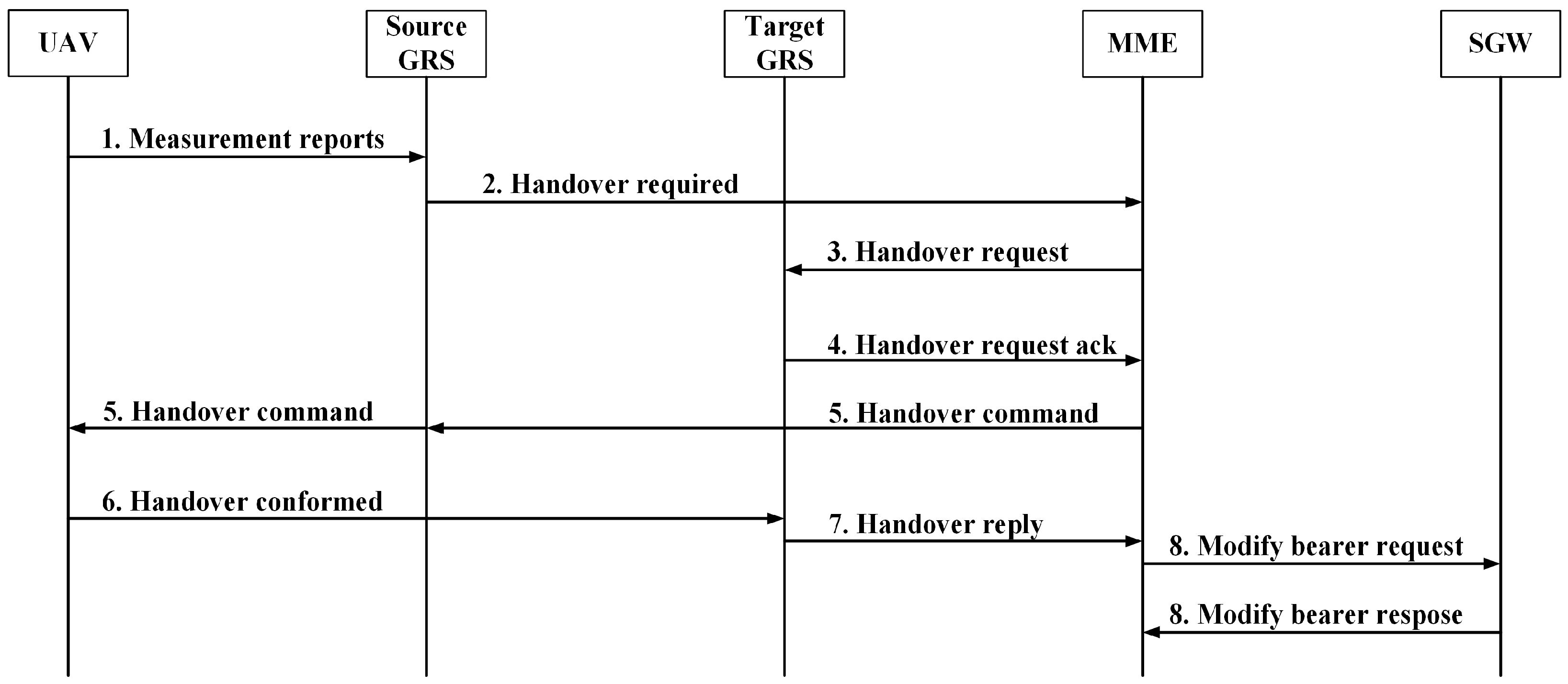
4.4. Handover Procedure in 5G
- The UE periodically sends the measurement report to the S-BS.
- The S-BS configures the measurement procedure of the UE.
- Based on the measurement report, the S-BS makes the switch decision, and the handover request is then received by the Target Base Station (T-BS).
- The T-BS replies with an acknowledgment to the S-BS based on its resources.
- The handover is initiated, and the T-BS supplies the UE with the necessary information, connecting it to the target cell.
- The UE receives uplink allocation and timing info sent from the T-BS.
- The T-BS updates the AMF for UE cell alteration, the UPF is updated by the AMF for the UE, the path of the UE is updated by the UPF, then the AMF notifies the T-BS for path update.
- The S-BS is updated by the T-BS for the completion of the handover.
5. Handover Challenges in Drone Networks
5.1. Drones’ Connectivity
5.2. Drones Challenges with 4G and 5G Networks
5.3. Interference Probability
5.4. Sidelobes
5.5. Security and Privacy
5.6. High Mobility Speeds
5.7. Handover Self-Optimization Functions
5.8. Handover Decision Algorithm
5.9. Handover Failures
5.10. Handover Ping-Pong Effect
5.11. Radio Link Failures
5.12. Other Mobility Issues
6. Related Works
6.1. Classical Based Techniques for Handover Management
6.2. Machine Learning-Based Technique
6.3. Deep Learning-Based Technique
6.4. Other Related Studies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | Year | Study Focus | Proposed Method | Solution Target | Environment |
|---|---|---|---|---|---|
| [59] | 2019 | Experimental work on handover | Performance evaluation based on experimental data | Study the effect of cell selection on handover | LTE-A network |
| [106] | 2012 | Mobility | Performance evaluation | Seamless horizontal and vertical mobility | VANET |
| [107] | 2011 | Mobility/handoff | Survey study | State of the art on mobility | Vehicular networks |
| [108] | 2015 | Coverage and handover control | Algorithm based on RSS, regulates the coverage of each drone. | Optimal coverage control and efficient handover | Drone networks |
| [109] | 2019 | Handover | Survey study | State of the art on handover | Vehicular ad hoc in 5G mobile networks |
| [110] | 2016 | Handover | Handover scheme to adjusts the height of a drone and the distance between the drones. | Handover management | Drone networks |
| [111] | 2016 | Cell-selection optimization handover | A multiple-criteria decision-making based on an integrated fuzzy technique | Cell-selection optimization handover | Long-Term Evolution (LTE) |
| [112] | 2017 | Handover optimization | Self-optimizing algorithm for handover detection, execution and decision parameter | Self-organizing method for handover performance optimization | LTE-Advanced network |
| [113] | 2017 | Fuzzy interference system | Fuzzy inference | Intelligent handover scheme | Drone network |
| [114] | 2018 | Classification of movements for mobility Prediction | This paper proposed a machine-learning-based solution for classifying mobility based on predicted node locations in the near future. | Mobility prediction and object profiling | Drones in UAV networks. |
| [115] | 2019 | Handover Probability | Tractable equivalent model and handover probability through stochastic geometry analysis | Equivalent model for 3D UAV networks. | UAV networks |
| [116] | 2019 | Mobility | Performance analysis based on stochastic geometry | Analysis under random waypoint mobility model | Drone cellular network |
| [117] | 2019 | Mobility Model for a Drone | Performance evaluation based on stochastic geometry | Mobility analysis | 3GPP-drone cellular network |
| [118] | 2019 | Mobility Support | Performance analysis | Experimental work for mobility | Cellular connected UAVs |
| [119] | 2019 | Route-aware handover enhancement | Algorithm based on path information |
| Drones in cellular networks |
| [120] | 2019 | Optimization of packet routing | Algorithm based on priority, time to live, and power consumption constraints | Novel DTN mobility algorithm improves packet driven routing | Autonomous drone logistics networks |
| [121] | 2019 | Mobility in mm-wave/THz bands | Performance analysis | Effects of mobility uncertainties on mm-wave/THz band | Drones in the mm-wave/THz bands |
| [122] | Location module for tracking to support mobility management of drones | A location module that can be integrated in Sensor Gateways and 5G BS | Location module to monitor UAVs and learn about their state while they are moving | Drones in 5G networks | |
| [123] | 2021 | Location strategy for Drone base stations | Machine learning and performance analysis | Address the optimal positioning of multiple DBSs | Heterogeneous networks |
| [125] | 2021 | UAV trajectory design considering mobile ground users | Deep Q-network (DQN)-based learning | Optimizes the trajectory of a UAV-BS by maximizing the mean opinion score (MOS) for ground users | 5G networks |
| [126] | 2021 | Beam and handoff prediction | Deep learning solution based on a recurrent neural network, namely the Gated Recurrent Unit (GRU) | Extend the coverage of drones and enhance the reliability of next-generation wireless | Terahertz (THz) drone networks |
| [127] | 2022 | Handover decision | Deep reinforcement learning | Avoid unnecessary handovers upholding reliable and stable communication | UAV networks |
| [128] | 2018 | On-demand on Ultra-Dense Cloud Drone Networks | Survey | Presented an Ultra-Dense Cloud-Drone Network (UDCDN) architecture | Ultra-Dense cloud Drone Networks |
| [129] | 2019 | Trajectory design and power control for UAV | Machine learning | Obtain the position information of users and the trajectory design of UAV. | UAV-Wireless Networks |
| [130] | 2019 | Interference modeling for UAV networks | Stochastic geometry | Efficient interference modeling | Drone Cellular Networks |
| [131] | 2019 | Modulation and coding scheme selection | Deep reinforcement learning | Efficient selection for modulation and coding scheme | Cognitive Heterogeneous Networks |
| [132] | 2021 | Mobility in drone taxi applications | Deep reinforcement learning | Compute the optimal transportation routes | UAV mobile network |
| [133] | 2021 | Dynamic object tracking on UAV system | A learning-based UAV system | Achieving autonomous surveillance | UAV mobile network |
| [134] | 2022 | Power-Efficient Wireless Coverage of UAVs | Multi-UAV 3D deployment with power-efficient planning |
| UAV mobile networks |
| [135] | 2022 | Fast Multi-UAV Path Planning for Optimal Area Coverage | Software framework and an algorithm | Obtains optimal UAV paths to Complete the overall mission at the minimum time. | UAV mobile networks |
| [136] | 2018 | Drone-delivery using autonomous mobility | Drone-delivery using autonomous mobility (DDAM) | Solve: (1) high demand of delivery; (2) short delivery lead-time; and (3) complex traffic congestion. | - |
| [137] | 2020 | Performance characterization of mobility models | Performance analysis | Characterize the performance of several canonical mobility models in a drone cellular network | Drone cellular Networks |
| [138] | 2020 | Mobility and service-oriented modeling | Neuro-fuzzy interference system | Assist in reliable and efficient route selection | Ad hoc networks |
| [139] | 2021 | Optimization for drone mobility | Q-learning | Optimize handover decision regularly to provide efficient mobility support with high data rate in time-sensitive applications, tactile Internet, and haptics communication | 5G and Beyond Ultra-Dense Networks |
| [140] | 2020 | Drone mobility support | Reinforcement learning/Q-learning algorithm | Ensure robust wireless connectivity and mobility support for drones in the sky | Long-term Evolution (LTE) and the Fifth-Generation New Radio (5G NR) |
7. Future Directions
7.1. Energy Efficiency
7.2. Mobility Management
7.3. Machine Learning for Drones
7.4. Deep Learning for Drones
7.5. IoT and Drones
7.6. MANETs and VANETs Applications in Drone Networks
7.7. New Cellular Technologies
7.8. Security
7.9. Mobile Edge Computing with Drones
7.10. Drone Antennas
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, X.; Savkin, A.V. Networked unmanned aerial vehicles for surveillance and monitoring: A survey. Future Internet 2021, 13, 174. [Google Scholar] [CrossRef]
- Bajracharya, R.; Shrestha, R.; Kim, S.; Jung, H. 6G NR-U based wireless infrastructure UAV: Standardization, opportunities, challenges and future scopes. IEEE Access 2022, 10, 30536–30555. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Akram, R.N.; Markantonakis, K.; Mayes, K.; Habachi, O.; Sauveron, D.; Steyven, A.; Chaumette, S. Security, privacy and safety evaluation of dynamic and static fleets of drones. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.-H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, chal-lenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Asadpour, M.; Bergh, B.V.D.; Giustiniano, D.; Hummel, K.A.; Pollin, S.; Plattner, B. Micro aerial vehicle networks: An experimental analysis of challenges and opportunities. IEEE Commun. Mag. 2014, 52, 141–149. [Google Scholar] [CrossRef]
- Marcus, M.J. Spectrum policy challenges of UAV/drones [Spectrum Policy and Regulatory Issues]. IEEE Wirel. Commun. 2014, 21, 8–9. [Google Scholar] [CrossRef]
- Elmeseiry, N.; Alshaer, N.; Ismail, T. A detailed survey and future directions of unmanned aerial vehicles (UAVs) with po-tential applications. Aerospace 2021, 8, 363. [Google Scholar] [CrossRef]
- Jiang, X.; Sheng, M.; Zhao, N.; Xing, C.; Lu, W.; Wang, X. Green UAV communications for 6G: A survey. Chin. J. Aeronaut. 2021, 35, 19–34. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on unmanned aerial vehicle networks for civil applications: A communications viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N.; Tanwar, S. Blockchain-envisioned UAV communication using 6G networks: Open issues, use cases, and future directions. IEEE Internet Things J. 2020, 8, 5416–5441. [Google Scholar] [CrossRef]
- Muruganathan, S.D.; Lin, X.; Maattanen, H.-L.; Sedin, J.; Zou, Z.; Hapsari, W.A.; Yasukawa, S. An overview of 3GPP release-15 study on enhanced LTE support for connected drones. IEEE Commun. Stand. Mag. 2021, 5, 140–146. [Google Scholar] [CrossRef]
- Popescu, D.; Dragana, C.; Stoican, F.; Ichim, L.; Stamatescu, G. A collaborative UAV-WSN network for monitoring large areas. Sensors 2018, 18, 4202. [Google Scholar] [CrossRef] [PubMed]
- Al-Fuqaha, A.; Guizani, M.; Mohammadi, M.; Aledhari, M.; Ayyash, M. Internet of things: A survey on enabling technologies, protocols, and applications. IEEE Commun. Surv. Tutor. 2015, 17, 2347–2376. [Google Scholar] [CrossRef]
- Park, T.; Abuzainab, N.; Saad, W. Learning How to Communicate in the Internet of Things: Finite resources and heterogeneity. IEEE Access 2016, 4, 7063–7073. [Google Scholar] [CrossRef]
- Zanella, A.; Bui, N.; Castellani, A.; Vangelista, L.; Zorzi, M. Internet of things for smart cities. IEEE Internet Things J. 2014, 1, 22–32. [Google Scholar] [CrossRef]
- Ferdowsi, A.; Saad, W. Deep learning-based dynamic watermarking for secure signal authentication in the internet of things. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Ding, G.; Wu, Q.; Zhang, L.; Lin, Y.; Tsiftsis, T.A.; Yao, Y.-D. An amateur drone surveillance system based on the cognitive internet of things. IEEE Commun. Mag. 2018, 56, 29–35. [Google Scholar] [CrossRef]
- Rodrigues, L.; Riker, A.; Ribeiro, M.; Both, C.; Sousa, F.; Moreira, W.; Cardoso, K.; Oliveira-Jr, A. Flight planning optimization of multiple UAVs for internet of things. Sensors 2021, 21, 7735. [Google Scholar] [CrossRef]
- Crawley, E.F. Intelligent structures for aerospace-A technology overview and assessment. AIAA J. 1994, 32, 1689–1699. [Google Scholar] [CrossRef]
- Sundqvist, L. Cellular Controlled Drone Experiment: Evaluation of Network Requirements. Master’s Thesis, Aalto University School of Electrical Engineering, Espoo, Finland, 2015. [Google Scholar]
- Lefebure, M. Device for Piloting a Drone. U.S. Patent 8214088B2, 3 July 2012. [Google Scholar]
- Orsino, A.; Ometov, A.; Fodor, G.; Moltchanov, D.; Militano, L.; Andreev, S.; Yilmay, O.N.C.; Tirronen, T.; Torsner, J.; Araniti, G.; et al. Effects of heterogeneous mobility on D2D-and drone-assisted mission-critical MTC in 5G. IEEE Commun. Mag. 2017, 55, 79–87. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Gomez, K. Modeling cellular-to-UAV path-loss for suburban environments. IEEE Wirel. Commun. Lett. 2017, 7, 82–85. [Google Scholar] [CrossRef]
- Van den Bergh, B.; Vermeulen, T.; Pollin, S. Analysis of harmful interference to and from aerial IEEE 802.11 systems. In Proceedings of the First Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use, Florence, Italy, 18 May 2015. [Google Scholar]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tutor. 2015, 18, 1123–1152. [Google Scholar] [CrossRef]
- Van Der Bergh, B.; Chiumento, A.; Pollin, S. LTE in the sky: Trading off propagation benefits with interference costs for aerial nodes. IEEE Commun. Mag. 2016, 54, 44–50. [Google Scholar] [CrossRef]
- Banagar, M.; Chetlur, V.V.; Dhillon, H.S. Handover Probability in Drone Cellular Networks. IEEE Wirel. Commun. Lett. 2020, 9, 933–937. [Google Scholar] [CrossRef]
- Amer, R.; Saad, W.; Marchettic, N. Mobility in the sky: Performance and mobility analysis for cellular-connected UAVs. IEEE Trans. Commun. 2020, 68, 3229–3246. [Google Scholar] [CrossRef]
- Angjo, J.; Shayea, I.; Ergen, M.; Mohamad, H.; Alhammadi, A.; Daradkeh, Y.I. Handover management of drones in future mobile networks: 6G technologies. IEEE Access 2021, 9, 12803–12823. [Google Scholar] [CrossRef]
- Zeng, Y.; Lyu, J.; Zhang, R. Cellular-connected UAV: Potential, challenges, and promising technologies. IEEE Wirel. Commun. 2018, 26, 120–127. [Google Scholar] [CrossRef]
- Azari, A.; Ghavimi, F.; Ozger, M.; Jantti, R.; Cavdar, C. Machine learning assisted handover and resource management for cellular connected drones. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Yang, H.; Hu, B.; Wang, L. A deep learning based handover mechanism for UAV networks. In Proceedings of the 2017 20th International Symposium on Wireless Personal Multimedia Communications (WPMC), Bali, Indonesia, 17–20 December 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Shakeri, R.; Al-Garadi, M.A.; Badawy, A.; Mohamed, A.; Khattab, T.; Al-Ali, A.K.; Harras, K.A.; Guizani, M. Design Challenges of Multi-UAV Systems in Cyber-Physical Applications: A Comprehensive Survey and Future Directions. IEEE Commun. Surv. Tutor. 2019, 21, 3340–3385. [Google Scholar] [CrossRef]
- Wang, H.; Zhao, H.; Zhang, J.; Ma, D.; Li, J.; Wei, J. Survey on unmanned aerial vehicle networks: A cyber physical system perspective. IEEE Commun. Surv. Tutor. 2019, 22, 1027–1070. [Google Scholar] [CrossRef]
- Tyagi, H.; Vatsa, A. Seamless handoff through information retrieval in VANET using mobile agent. Int. J. Comput. Sci. Issues 2011, 8, 634. [Google Scholar]
- Challita, U.; Ferdowsi, A.; Chen, M.; Saad, W. Machine learning for wireless connectivity and security of cellular-connected UAVs. IEEE Wirel. Commun. 2019, 26, 28–35. [Google Scholar] [CrossRef]
- Chandhar, P.; Larsson, E.G. Massive MIMO for connectivity with drones: Case studies and future directions. IEEE Access 2019, 7, 94676–94691. [Google Scholar] [CrossRef]
- Amer, R.; Saad, W.; Marchetti, N. Toward a connected sky: Performance of beamforming with down-tilted antennas for ground and uav user co-existence. IEEE Commun. Lett. 2019, 23, 1840–1844. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP Altitude for Maximum Coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Shrestha, R.; Nam, S.Y.; Bajracharya, R.; Kim, S. Evolution of V2X communication and integration of blockchain for security enhancements. Electronics 2020, 9, 1338. [Google Scholar] [CrossRef]
- Li, X. Deployment of drone base stations for cellular communication without apriori user distribution information. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Chowdhury, M.Z.; Shahjalal, M.; Ahmed, S.; Jang, Y.M. 6G wireless communication systems: Applications, requirements, technologies, challenges, and research directions. IEEE Open J. Commun. Soc. 2020, 1, 957–975. [Google Scholar] [CrossRef]
- Deebak, B.D.; Al-Turjman, F. Drone of IoT in 6G wireless communications: Technology, challenges, and future aspects. In Unmanned Aerial Vehicles in Smart Cities; Springer: Berlin/Heidelberg, Germany, 2020; pp. 153–165. [Google Scholar]
- Nayak, S.; Patgiri, R. 6G communication: A vision on the potential applications. In Edge Analytics; Springer: Berlin/Heidelberg, Germany, 2022; pp. 203–218. [Google Scholar]
- Alraih, S.; Shayea, I.; Behjati, M.; Nordin, R.; Abdullah, N.F.; Abu-Samah, A.; Nandi, D. Revolution or evolution? Technical requirements and considerations towards 6g mobile communications. Sensors 2022, 22, 762. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, J.; Wang, J.; Cao, Y.; Kato, N. When Machine Learning Meets Privacy in 6G: A Survey. IEEE Commun. Surv. Tutor. 2020, 22, 2694–2724. [Google Scholar] [CrossRef]
- Shafin, R.; Liu, L.; Chandrasekhar, V.; Chen, H.; Reed, J.; Zhang, J.C. Artificial intelligence-enabled cellular networks: A critical path to beyond-5G and 6G. IEEE Wirel. Commun. 2020, 27, 212–217. [Google Scholar] [CrossRef]
- Liang, Y.-C.; Niyato, D.; Larsson, E.G.; Popovski, P. Guest editorial: 6G mobile networks: Emerging technologies and ap-plications. China Commun. 2020, 17, 90–91. [Google Scholar] [CrossRef]
- Kato, N.; Mao, B.; Tang, F.; Kawamoto, Y.; Liu, J. Ten Challenges in Advancing Machine Learning Technologies toward 6G. IEEE Wirel. Commun. 2020, 27, 96–103. [Google Scholar] [CrossRef]
- Zong, B.; Fan, C.; Wang, X.; Duan, X.; Wang, B.; Wang, J. 6G technologies: Key drivers, core requirements, system architectures, and enabling technologies. IEEE Veh. Technol. Mag. 2019, 14, 18–27. [Google Scholar] [CrossRef]
- Zhang, Z.; Xiao, Y.; Ma, Z.; Xiao, M.; Ding, Z.; Lei, X.; Karagiannidis, G.K.; Fan, P. 6G wireless networks: Vision, requirements, architecture, and key technologies. IEEE Veh. Technol. Mag. 2019, 14, 28–41. [Google Scholar] [CrossRef]
- Yang, P.; Xiao, Y.; Xiao, M.; Li, S. 6G wireless communications: Vision and potential techniques. IEEE Netw. 2019, 33, 70–75. [Google Scholar] [CrossRef]
- Islam, A.; Rahim, T.; Masuduzzaman, M.; Shin, S.Y. A blockchain-based artificial intelligence-empowered contagious pan-demic situation supervision scheme using internet of drone things. IEEE Wirel. Commun. 2021, 28, 166–173. [Google Scholar] [CrossRef]
- Islam, A.; Al Amin, A.; Shin, S.Y. FBI: A federated learning-based blockchain-embedded data accumulation scheme using drones for internet of things. IEEE Wirel. Commun. Lett. 2022, 11, 972–976. [Google Scholar] [CrossRef]
- Samsung Research. 6G: The Next Hyper Connected Experience for All. 2020. Available online: https://research.samsung.com/next-generation-communications (accessed on 24 July 2022).
- Shrestha, R.; Bajracharya, R.; Kim, S. 6G enabled unmanned aerial vehicle traffic management: A perspective. IEEE Access 2021, 9, 91119–91136. [Google Scholar] [CrossRef]
- Ohleger, M.; Xie, G.G.; Gibson, J.H. Extending uav video dissemination via seamless handover: A proof of concept evaluation of the IEEE 802.21 standard. In Proceedings of the 2013 46th Hawaii International Conference on System Sciences, Wailea, HI, USA, 7–10 January 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar]
- Fakhreddine, A.; Bettstetter, C.; Hayat, S.; Muzaffar, R.; Emini, D. Handover challenges for cellular-connected drones. In Proceedings of the 5th Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, Seoul, Korea, 21 June 2019. [Google Scholar]
- Hu, B.; Yang, H.; Wang, L.; Chen, S. A trajectory prediction based intelligent handover control method in UAV cellular networks. China Commun. 2019, 16, 1–14. [Google Scholar]
- Federal Aviation Administration. Unmanned Aircraft System (UAS) Traffic Management (UTM); NextGen Concept Operations; Federal Aviation Administration: Washington, DC, USA, 2018; pp. 1–68. [Google Scholar]
- SESAR Joint Undertaking. U-Space Blueprint; SESAR Joint Undertaking: Brussels, Belgium, 2017; Volume 18. [Google Scholar]
- Jang, Y.; Raza, S.M.; Kim, M.; Choo, H. Proactive handover decision for UAVs with deep reinforcement learning. Sensors 2022, 22, 1200. [Google Scholar] [CrossRef]
- Gupta, A.K.; Goel, V.; Garg, R.R.; Thirupurasundari, D.R.; Verma, A.; Sain, M. A fuzzy based handover decision scheme for mobile devices using predictive model. Electronics 2021, 10, 2016. [Google Scholar] [CrossRef]
- Mollel, M.S.; Abubakar, A.I.; Ozturk, M.; Kaijage, S.; Kisangiri, M.; Zoha, A.; Imran, M.A.; Abbasi, Q.H. Intelligent handover decision scheme using double deep reinforcement learning. Phys. Commun. 2020, 42, 101133. [Google Scholar] [CrossRef]
- Hussain, S.M.; Yusof, K.M.; Asuncion, R. Artificial intelligence based handover decision and network selection in heteroge-neous internet of vehicles. Indones. J. Electr. Eng. Comput. Sci. 2021, 22, 1124–1134. [Google Scholar]
- Gaur, A.S.; Budakoti, J.; Lung, C.H.; Redmond, A. IoT-equipped UAV communications with seamless vertical handover. In Proceedings of the 2017 IEEE Conference on Dependable and Secure Computing, Taipei, Taiwan, 7–10 August 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Jung, S.; Kim, J. A new way of extending network coverage: Relay-assisted D2D communications in 3GPP. ICT Express 2016, 2, 117–121. [Google Scholar] [CrossRef]
- Ergen, M. Mobile Broadband: Including WiMAX and LTE; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Akyildiz, I.; McNair, J.; Ho, J.; Uzunalioglu, H.; Wang, W. Mobility management in next-generation wireless systems. Proc. IEEE 1999, 87, 1347–1384. [Google Scholar] [CrossRef] [Green Version]
- Tripathi, N.D.; Reed, J.H.; VanLandinoham, H.F. Handoff in cellular systems. IEEE Pers. Commun. 1998, 5, 26–37. [Google Scholar] [CrossRef]
- Lampropoulos, G.; Passas, N.; Merakos, L.; Kaloxylos, A. Handover management architectures in integrated WLAN/cellular networks. IEEE Commun. Surv. Tutor. 2005, 7, 30–44. [Google Scholar] [CrossRef]
- Isa, I.N.; Baba, M.D.; Ab Rahman, R.; Yusof, A.L. Self-organizing network based handover mechanism for LTE networks. In Proceedings of the 2015 International Conference on Computer, Communications, and Control Technology (I4CT), Kuching, Malaysia, 21–23 April 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Li, Y.; Cao, B.; Wang, C. Handover schemes in heterogeneous LTE networks: Challenges and opportunities. IEEE Wirel. Commun. 2016, 23, 112–117. [Google Scholar] [CrossRef]
- Ulvan, A.; Bestak, R.; Ulvan, M. The study of handover procedure in LTE-based femtocell network. In Proceedings of the WMNC2010, Budapest, Hungary, 13–15 October 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Choi, J.-I.; Seo, W.-K.; Nam, J.-C.; Park, I.-S.; Cho, Y.-Z. Handover decision algorithm based on available data volume in hierarchical macro/femto-cell networks. In Proceedings of the 2012 Fourth International Conference on Communications and Electronics (ICCE), Hue, Vietnam, 1–3 August 2012; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Ray, S.K.; Sirisena, H.; Deka, D. LTE-Advanced handover: An orientation matching-based fast and reliable approach. In Proceedings of the 38th Annual IEEE Conference on Local Computer Networks, Sydney, NSW, Australia, 21–24 October 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar]
- Nguyen, M.T.; Kwon, S.; Kim, H. Mobility robustness optimization for handover failure reduction in LTE small-cell networks. IEEE Trans. Veh. Technol. 2017, 67, 4672–4676. [Google Scholar] [CrossRef]
- Alhammadi, A.; Roslee, M.; Alias, M.Y.; Shayea, I.; Alquhali, A. Velocity-aware handover self-optimization management for next generation networks. Appl. Sci. 2020, 10, 1354. [Google Scholar] [CrossRef]
- Shayea, I.; Ergen, M.; Azmi, M.H.; Colak, S.A.; Nordin, R.; Daradkeh, Y.I. Key challenges, drivers and solutions for mobility management in 5G networks: A survey. IEEE Access 2020, 8, 172534–172552. [Google Scholar] [CrossRef]
- Gures, E.; Shayea, I.; Alhammadi, A.; Ergen, M.; Mohamad, H. A comprehensive survey on mobility management in 5G heterogeneous networks: Architectures, challenges and solutions. IEEE Access 2020, 8, 195883–195913. [Google Scholar] [CrossRef]
- Shayea, I.; Ergen, M.; Azizan, A.; Ismail, M.; Daradkeh, Y.I. Individualistic dynamic handover parameter self-optimization algorithm for 5G networks based on automatic weight function. IEEE Access 2020, 8, 214392–214412. [Google Scholar] [CrossRef]
- Alhammadi, A.; Roslee, M.; Alias, M.Y.; Shayea, I.; Alraih, S.; Mohamed, K.S. Auto tuning self-optimization algorithm for mobility management in LTE-A and 5G hetnets. IEEE Access 2019, 8, 294–304. [Google Scholar] [CrossRef]
- Alhammadi, A.; Roslee, M.; Alias, M.Y.; Shayea, I.; Alriah, S.; Bin Abas, A. Advanced handover self-optimization approach for 4G/5G HetNets using weighted fuzzy logic control. In Proceedings of the 2019 15th International Conference on Telecom-munications (ConTEL), Graz, Austria, 3–5 July 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Shayea, I.; Ismail, M.; Nordin, R.; Mohamad, H. Handover performance over a coordinated contiguous carrier aggregation deployment scenario in the LTE-advanced system. Int. J. Veh. Technol. 2014, 2014, 971297. [Google Scholar] [CrossRef] [Green Version]
- Lin, X.; Yajnanarayana, V.; Muruganathan, S.D.; Gao, S.; Asplund, H.; Maattanen, H.-L.; Bergstrom, M.; Euler, S.; Wang, Y.-P.E. The sky is not the limit: LTE for unmanned aerial vehicles. IEEE Commun. Mag. 2018, 56, 204–210. [Google Scholar] [CrossRef]
- Cao, Y.; Zhang, L.; Liang, Y.-C. Deep reinforcement learning for user access control in UAV networks. In Proceedings of the 2018 IEEE International Conference on Communication Systems (ICCS), Chengdu, China, 19–21 December 2018; IEEE: Pis-cataway, NJ, USA, 2018. [Google Scholar]
- Lin, C.; He, D.; Kumar, N.; Choo, K.-K.R.; Vinel, A.; Huang, X. Security and privacy for the internet of drones: Challenges and solutions. IEEE Commun. Mag. 2018, 56, 64–69. [Google Scholar] [CrossRef]
- Yahuza, M.; Idris, M.Y.I.; Bin Ahmedy, I.; Wahab, A.W.B.A.; Nandy, T.; Noor, N.M.; Bala, A. Internet of drones security and privacy issues: Taxonomy and open challenges. IEEE Access 2021, 9, 57243–57270. [Google Scholar] [CrossRef]
- Ilgi, G.S.; Ever, Y.K. Critical analysis of security and privacy challenges for the Internet of drones: A survey. In Drones in Smart-Cities; Elsevier: Amsterdam, The Netherlands, 2020; pp. 207–214. [Google Scholar]
- Albalawi, M.; Song, H. Data security and privacy issues in swarms of drones. In Proceedings of the 2019 Integrated Com-munications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 9–11 April 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Bilen, T.; Canberk, B.; Chowdhury, K.R. Handover management in software-defined ultra-dense 5G networks. IEEE Netw. 2017, 31, 49–55. [Google Scholar] [CrossRef]
- Joud, M.; García-Lozano, M.; Ruiz, S. User specific cell clustering to improve mobility robustness in 5G ultra-dense cellular networks. In Proceedings of the 2018 14th Annual Conference on Wireless On-Demand Network Systems and Services (WONS), Isola, France, 6–8 February 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Zhang, H.; Huang, W.; Liu, Y. Handover probability analysis of anchor-based multi-connectivity in 5G user-centric network. IEEE Wirel. Commun. Lett. 2018, 8, 396–399. [Google Scholar] [CrossRef]
- Cacciapuoti, A.S. Mobility-aware user association for 5G mmwave networks. IEEE Access 2017, 5, 21497–21507. [Google Scholar] [CrossRef]
- Alhabo, M.; Zhang, L. Unnecessary handover minimization in two-tier heterogeneous networks. In Proceedings of the 2017 13th Annual Conference on Wireless On-Demand Network Systems and Services (WONS), Jackson, WY, USA, 21–24 February 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Semiari, O.; Saad, W.; Bennis, M.; Debbah, M. Integrated Millimeter Wave and Sub-6 GHz Wireless Networks: A Roadmap for Joint Mobile Broadband and Ultra-Reliable Low-Latency Communications. IEEE Wirel. Commun. 2019, 26, 109–115. [Google Scholar] [CrossRef]
- An, J.; Yang, K.; Wu, J.; Ye, N.; Guo, S.; Liao, Z. Achieving Sustainable Ultra-Dense Heterogeneous Networks for 5G. IEEE Commun. Mag. 2017, 55, 84–90. [Google Scholar] [CrossRef]
- Malm, N.; Zhou, L.; Menta, E.; Ruttik, K.; Jantti, R.; Tirkkonen, O.; Costa, M.; Leppanen, K. User localization enabled ultra-dense network testbed. In Proceedings of the 2018 IEEE 5G World Forum (5GWF), Silicon Valley, CA, USA, 9–11 July 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Yang, B.; Yang, X.; Ge, X.; Li, Q. Coverage and handover analysis of ultra-dense millimeter-wave networks with control and user plane separation architecture. IEEE Access 2018, 6, 54739–54750. [Google Scholar] [CrossRef]
- Wang, G.; Lim, K.; Lee, B.S.; Ahn, J.Y. Handover key management in an lte-based unmanned aerial vehicle control network. In Proceedings of the 2017 5th International Conference on Future Internet of Things and Cloud Workshops (FiCloudW), Prague, Czech Republic, 21–23 August 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Stein, J.; Survey of IEEE802. 21 Media Independent Handover Services. 2006. Available online: http://www.cs.wustl.edu/jain/cse574-06/ftp/handover/index.html (accessed on 24 July 2022).
- Piri, E.; Pentikousis, K. IEEE 802.21: Media independent handover services. Internet Protoc. J. 2009, 12, 7–27. [Google Scholar]
- Visvan, V.; Beevi, A.; Nasseema, N. Efficient media independent handover scheme for mission-critical management. IOSR J. Comput. Eng. 2012, 7, 10–14. [Google Scholar]
- Cespedes, S.; Lu, N.; Shen, X. VIP-WAVE: On the feasibility of IP communications in 802.11p vehicular networks. IEEE Trans. Intell. Transp. Syst. 2012, 14, 82–97. [Google Scholar] [CrossRef] [Green Version]
- Dias, J.; Cardote, A.; Neves, F.; Sargento, S.; Oliveira, A. Seamless horizontal and vertical mobility in VANET. In Proceedings of the 2012 IEEE Vehicular Networking Conference (VNC), Seoul, Korea, 14–16 November 2012; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Zhu, K.; Niyato, D.; Wang, P.; Hossain, E.; Kim, D.I. Mobility and handoff management in vehicular networks: A survey. Wirel. Commun. Mob. Comput. 2011, 11, 459–476. [Google Scholar] [CrossRef]
- Park, K.N.; Cho, B.M.; Park, K.J.; Kim, H. Optimal coverage control for net-drone handover. In Proceedings of the 2015 Seventh International Conference on Ubiquitous and Future Networks, Sapporo, Japan, 7–10 July 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Ahmed, A.A.; Alzahrani, A.A. A comprehensive survey on handover management for vehicular ad hoc network based on 5G mobile networks technology. Trans. Emerg. Telecommun. Technol. 2019, 30, e3546. [Google Scholar] [CrossRef]
- Park, K.-N.; Kang, J.-H.; Cho, B.-M.; Kim, H. Handover management of net-drones for future internet platforms. Int. J. Distrib. Sens. Netw. 2016, 12, 5760245. [Google Scholar] [CrossRef]
- Hussein, Y.S.; Ali, B.M.; Rasid, M.F.A.; Sali, A.; Mansoor, A.M. A novel cell-selection optimization handover for long-term evolution (LTE) macrocellusing fuzzy TOPSIS. Comput. Commun. 2016, 73, 22–33. [Google Scholar] [CrossRef]
- Chaudhuri, S.; Baig, I.; Das, D. Self organizing method for handover performance optimization in LTE-advanced network. Comput. Commun. 2017, 110, 151–163. [Google Scholar] [CrossRef]
- Lee, E.; Choi, C.; Kim, P. Intelligent handover scheme for drone using fuzzy inference systems. IEEE Access 2017, 5, 13712–13719. [Google Scholar] [CrossRef]
- Peng, H.; Razi, A.; Afghah, F.; Ashdown, J. A unified framework for joint mobility prediction and object profiling of drones in UAV networks. J. Commun. Netw. 2018, 20, 434–442. [Google Scholar] [CrossRef]
- Huang, W.; Zhang, H.; Zhou, M. Analysis of handover probability based on equivalent model for 3D UAV networks. In Proceedings of the 2019 IEEE 30th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Istanbul, Turkey, 8–11 September 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Banagar, M.; Dhillon, H.S. Fundamentals of drone cellular network analysis under random waypoint mobility model. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Banagar, M.; Dhillon, H.S. 3GPP-inspired stochastic geometry-based mobility model for a drone cellular network. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Euler, S.; Maattanen, H.-L.; Lin, X.; Zou, Z.; Bergstrom, M.; Sedin, J. Mobility support for cellular connected unmanned aerial vehicles: Performance and analysis. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Bai, J.; Yeh, S.-P.; Xue, F.; Talwar, S. Route-aware handover enhancement for drones in cellular networks. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Iranmanesh, S.; Raad, R.; Raheel, M.S.; Tubbal, F.; Jan, T. Novel DTN mobility-driven routing in autonomous drone logistics networks. IEEE Access 2019, 8, 13661–13673. [Google Scholar] [CrossRef]
- Guan, Z.; Kulkarni, T. On the effects of mobility uncertainties on wireless communications between flying drones in the mmWave/THz bands. In Proceedings of the IEEE INFOCOM 2019-IEEE Conference on Computer Communications Work-shops (INFOCOM WKSHPS), Paris, France, 29 April–2 May 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Nithin, P.S.; Shibu, N.S.; Lakshmi, S.S.; Ponnekanti, S. Location module for 5G base station to support mobility management of drones. In Proceedings of the 2019 International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 17–19 July 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Morocho-Cayamcela, M.E.; Lim, W.; Maier, M. An optimal location strategy for multiple drone base stations in massive MIMO. ICT Express 2021, 8, 230–234. [Google Scholar] [CrossRef]
- Di Cola, F.; Chan, P.M.L.; Sheriff, R.E.; Hu, Y.F. Handover and qos support in multi-segment broadband networks. In Proceedings of the 4th European Workshop on Mobile and Personal Satellite Commun, London, UK, 18 September 2000. [Google Scholar]
- Lee, W.; Jeon, Y.; Kim, T.; Kim, Y.-I. Deep reinforcement learning for UAV trajectory design considering mobile ground users. Sensors 2021, 21, 8239. [Google Scholar] [CrossRef]
- Abuzainab, N.; Alrabeiah, M.; Alkhateeb, A.; Sagduyu, Y.E. Deep learning for THz drones with flying intelligent surfaces: Beam and handoff prediction. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar]
- Cao, Y.; Zhang, L.; Liang, Y.-C. Deep Reinforcement Learning for Multi-User Access Control in UAV Networks. In Proceedings of the ICC 2019—2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Sharma, N.; Magarini, M.; Jayakody, D.N.K.; Sharma, V.; Li, J. On-demand ultra-dense cloud drone networks: Opportunities, challenges and benefits. IEEE Commun. Mag. 2018, 56, 85–91. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y.; Hanzo, L. Trajectory design and power control for multi-UAV assisted wireless networks: A machine learning approach. IEEE Trans. Veh. Technol. 2019, 68, 7957–7969. [Google Scholar] [CrossRef]
- Chu, E.; Kim, J.M.; Jung, B.C. Interference modeling and analysis in 3-dimensional directional UAV networks based on sto-chastic geometry. ICT Express 2019, 5, 235–239. [Google Scholar] [CrossRef]
- Zhang, L.; Tan, J.; Liang, Y.-C.; Feng, G.; Niyato, D. Deep reinforcement learning-based modulation and coding scheme se-lection in cognitive heterogeneous networks. IEEE Trans. Wirel. Commun. 2019, 18, 3281–3294. [Google Scholar] [CrossRef]
- Yun, W.J.; Jung, S.; Kim, J.; Kim, J.-H. Distributed deep reinforcement learning for autonomous aerial eVTOL mobility in drone taxi applications. ICT Express 2021, 7, 1–4. [Google Scholar] [CrossRef]
- Lo, L.-Y.; Yiu, C.H.; Tang, Y.; Yang, A.-S.; Li, B.; Wen, C.-Y. Dynamic object tracking on autonomous UAV system for sur-veillance applications. Sensors 2021, 21, 7888. [Google Scholar] [CrossRef] [PubMed]
- Sawalmeh, A.; Othman, N.S.; Liu, G.; Khreishah, A.; Alenezi, A.; Alanazi, A. Power-efficient wireless coverage using minimum number of UAVs. Sensors 2021, 22, 223. [Google Scholar] [CrossRef] [PubMed]
- Luna, M.A.; Isaac, M.S.A.; Ragab, A.R.; Campoy, P.; Peña, P.F.; Molina, M. Fast Multi-UAV Path Planning for Optimal Area Coverage in Aerial Sensing Applications. Sensors 2022, 22, 2297. [Google Scholar] [CrossRef]
- Yoo, H.D.; Chankov, S.M. Drone-delivery using autonomous mobility: An innovative approach to future last-mile delivery problems. In Proceedings of the 2018 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Bangkok, Thailand, 16–19 December 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Banagar, M.; Dhillon, H.S. Performance characterization of canonical mobility models in drone cellular networks. IEEE Trans. Wirel. Commun. 2020, 19, 4994–5009. [Google Scholar] [CrossRef]
- Kumar, K.; Kumar, S.; Kaiwartya, O.; Kashyap, P.K.; Lloret, J.; Song, H. Drone assisted flying ad-hoc networks: Mobility and service oriented modeling using neuro-fuzzy. Ad Hoc Netw. 2020, 106, 102242. [Google Scholar] [CrossRef]
- Tanveer, J.; Haider, A.; Ali, R.; Kim, A. Reinforcement learning-based optimization for drone mobility in 5G and beyond ultra-dense networks. Comput. Mater. Contin. 2021, 68, 3807–3823. [Google Scholar] [CrossRef]
- Chen, Y.; Lin, X.; Khan, T.; Mozaffari, M. Efficient drone mobility support using reinforcement learning. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Korea, 25–28 May 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Domingo, M.C. Power Allocation and energy cooperation for UAV-enabled mmwave networks: A multi-agent deep rein-forcement learning approach. Sensors 2021, 22, 270. [Google Scholar] [CrossRef]
- Grewe, L.; Stevenson, G. Seeing eye drone: A deep learning, vision-based UAV for assisting the visually impaired with mobility. In Proceedings of the ACM Turing Celebration Conference-China, Chengdu, China, 17–19 May 2019. [Google Scholar]
- Jeong, S.; Simeone, O.; Kang, J. Mobile edge computing via a UAV-mounted cloudlet: Optimization of bit allocation and path planning. IEEE Trans. Veh. Technol. 2017, 67, 2049–2063. [Google Scholar] [CrossRef] [Green Version]
- Ganti, S.R.; Kim, Y. Design of low-cost on-board auto-tracking antenna for small UAS. In Proceedings of the 2015 12th International Conference on Information Technology—New Generations, Las Vegas, NV, USA, 13–15 April 2015; IEEE: Pisca-taway, NJ, USA, 2015. [Google Scholar]



| Item | Descriptions | Item | Descriptions |
|---|---|---|---|
| 2D | Two Dimensional | OWC | Optical Wireless Communication |
| 3D | Three-Dimensional | RRC | Real-Time Control |
| 3G | Third Generation | mm-wave | Millimeter Wave |
| 4G | Fourth Generation | MR | Mixed Reality |
| 5G | Fifth Generation | m-Wave | Micrometer-Wave |
| 6G | Sixth Generation | NCHO | Network-Controlled Handoff |
| ABSs | Aerial Base Stations | NEMO | Network Mobility |
| AI | Artificial Intelligence | NLoS | Non-Line-Of-Sight |
| AMF | Access And Mobility Management | PCI | Physical Cell Identity |
| API | Application Programming Interface | PGW | Packet Data Network Gateway |
| AR | Augmented Reality | PMIP | Proxy Mobile IP |
| AuC | Authentication Center | PPP | Poisson Point Process |
| BSs | Base Stations | PPs | Ping-Pongs |
| CoA | Centroid Of Area | QoS | Quality Of Service |
| CoMP | Coordinated Multi-Point | REHO | Reduced Early |
| D2D | Device-to-Device | RL | Reinforcement-Learning |
| DBS | Drone Base Stations | RLFs | Radio Link Failures |
| DRL | Deep Reinforcement Learning | RNN | Recurrent Neural Network |
| DSM | Different Speed Model | RSRP | Reference Signal Received Power |
| FAA | Federal Aviation Administration | RSS | Received Signal Strength |
| FMIPv6 | Fast Mobile Ipv6 | RSSI | Received Signal Strength Indicator |
| GCS | Ground Control Station | RWP | Random Waypoint |
| GPS | Global Positioning System | S-BS | Serving Base Station |
| GPUs | Graphical Processing Units | SDN | Software-Defined Network |
| HD-SOHP | Handover Detection Self-Organizing Handover Parameters | SGW | Serving Gateway |
| HetNets | Heterogeneous Networks | SINR | Signal-to-Interference-Plus-Noise Ratio |
| HMIPV6 | Hierarchical Mobile IPv6 | SRSs | Sounding Reference Signals |
| HOF | Handover Failure | SSM | Same Speed Model |
| HOs | Handovers | STRAW | Street Random Waypoint |
| HOM | Handover Margin | T-BS | Target Base Station |
| H-RRM | HO And Radio Resource Management | TCP | Transmission Control Protocol |
| HSS | Home Subscriber Server | TTT | Time-to-Trigger |
| IDT | Internet of Drone Things | U2I | UAV-to-Infrastructure |
| IIoT | Industrial IoT | U2U | UAV-to-UAV |
| IoE | Internet of Everything | UAVDRONEs | Unmanned Aerial Vehicles |
| IoT | Internet of Things | UCB | Unit Control Block |
| KPIs | Key Performance Indicators | UEs | User Equipment |
| LAANC | Low Altitude Authorization and Notification Capability | UPF | User Plane Function |
| LAN | Local Area Network | URLLC | Ultrareliable Low-Latency Communication |
| LoS | Line-of-Sight | UTM | Unmanned Aircraft Systems Traffic Management |
| LTE-A | Long-Term Evolution | V2V | Vehicle-to-Vehicle |
| MAHO | Mobile-Assisted Handoff | V2X | Vehicle-to-Everything |
| MANETs | Mobile Ad Hoc Networks | VANETs | Vehicular Ad Hoc Networks |
| mcMTC | Mission-Critical Machine-Type Communication | VIP | Vehicular IP |
| MEC | Mobile Edge Computing | VR | Virtual Reality |
| MIH | Media Independent HO | Wi-Fi | Wireless Fidelity |
| MIMO | Multiple-Input Multiple-Output | WLAN | Wireless Local Area Network |
| MIPv4 | Mobile IP Version 4 | WMNs | Wireless Mesh Networks |
| MME | Mobility Management Entity | XR | Extended Reality |
| Algorithms | No. of Handover (Random) | No. of Handover (Straight) |
|---|---|---|
| Conventional | 13.86 | 5.03 |
| Work done by [113] | 0.84 | 2.37 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shayea, I.; Dushi, P.; Banafaa, M.; Rashid, R.A.; Ali, S.; Sarijari, M.A.; Daradkeh, Y.I.; Mohamad, H. Handover Management for Drones in Future Mobile Networks—A Survey. Sensors 2022, 22, 6424. https://doi.org/10.3390/s22176424
Shayea I, Dushi P, Banafaa M, Rashid RA, Ali S, Sarijari MA, Daradkeh YI, Mohamad H. Handover Management for Drones in Future Mobile Networks—A Survey. Sensors. 2022; 22(17):6424. https://doi.org/10.3390/s22176424
Chicago/Turabian StyleShayea, Ibraheem, Pabiola Dushi, Mohammed Banafaa, Rozeha A. Rashid, Sawsan Ali, Mohd Adib Sarijari, Yousef Ibrahim Daradkeh, and Hafizal Mohamad. 2022. "Handover Management for Drones in Future Mobile Networks—A Survey" Sensors 22, no. 17: 6424. https://doi.org/10.3390/s22176424
APA StyleShayea, I., Dushi, P., Banafaa, M., Rashid, R. A., Ali, S., Sarijari, M. A., Daradkeh, Y. I., & Mohamad, H. (2022). Handover Management for Drones in Future Mobile Networks—A Survey. Sensors, 22(17), 6424. https://doi.org/10.3390/s22176424