

Fuzzy Strategy Grey Wolf Optimizer for Complex Multimodal Optimization Problems
Abstract
:1. Introduction
2. Related Work
2.1. Algorithm Flow of the Original Grey Wolf Optimizer
| Algorithm 1. Pseudocode of the original GWO algorithm [21]. |
Initialize the grey wolf population Xi (i = 1, 2, …, M) Initialize a, A, and C Calculate the fitness of each search agent = the best search agent Xβ = the second-best search agent = the third-best search agent while (t < Max number of iterations) for each search agent Update the position of Xi end for Update a, A, and C Calculate the fitness of all search agents Update Xα, , and Xδ t = t + 1 end while return |
2.2. Fuzzy Adaptive Control Parameters
3. The Proposed Algorithm
3.1. Mutation Strategy with a Fuzzy Search Direction
3.2. Fuzzy Crossover Operator
3.3. Updated Parameters of the Bivariate Joint Normal Distribution
3.3.1. Update of μ
3.3.2. Update of ∑
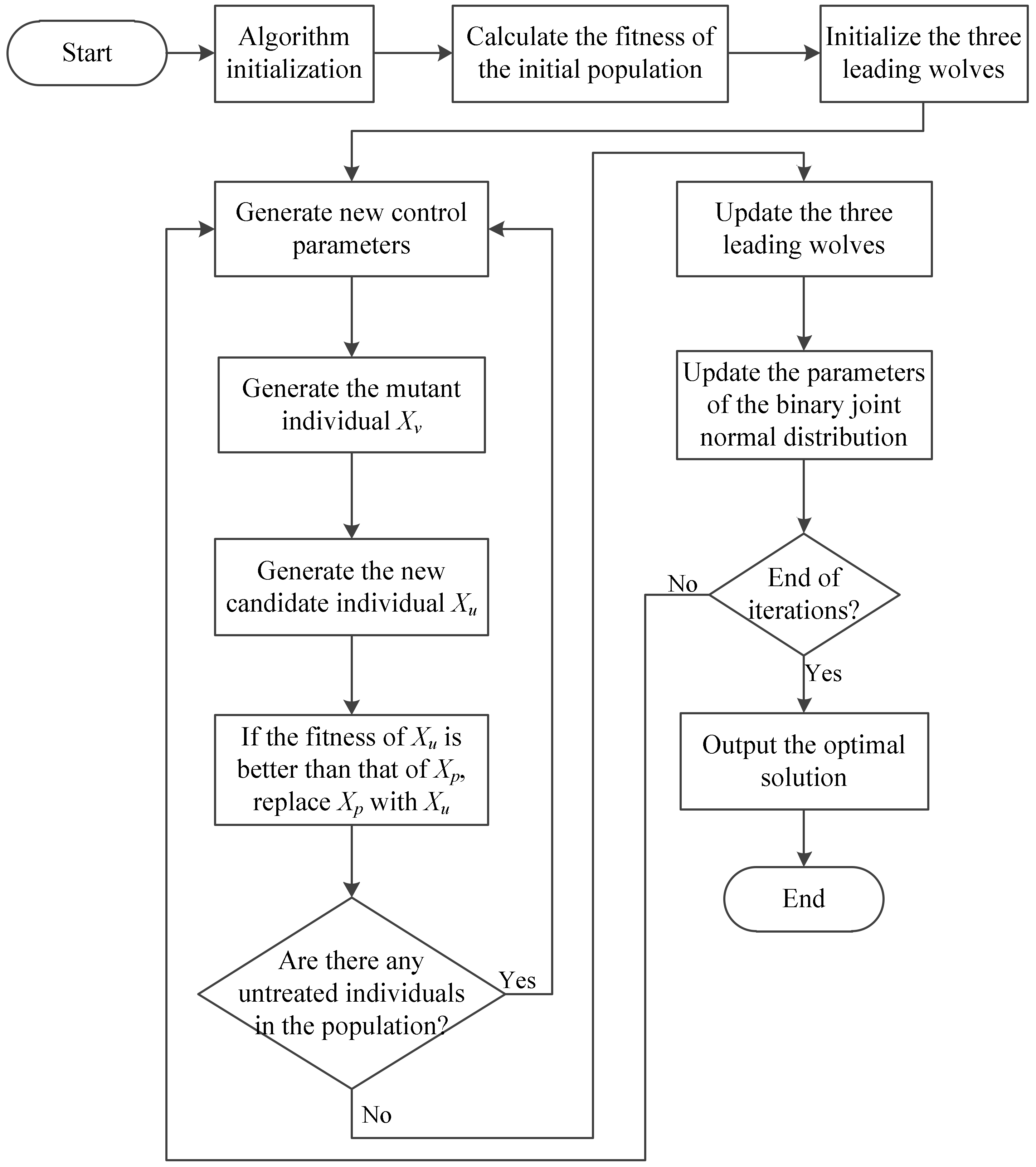
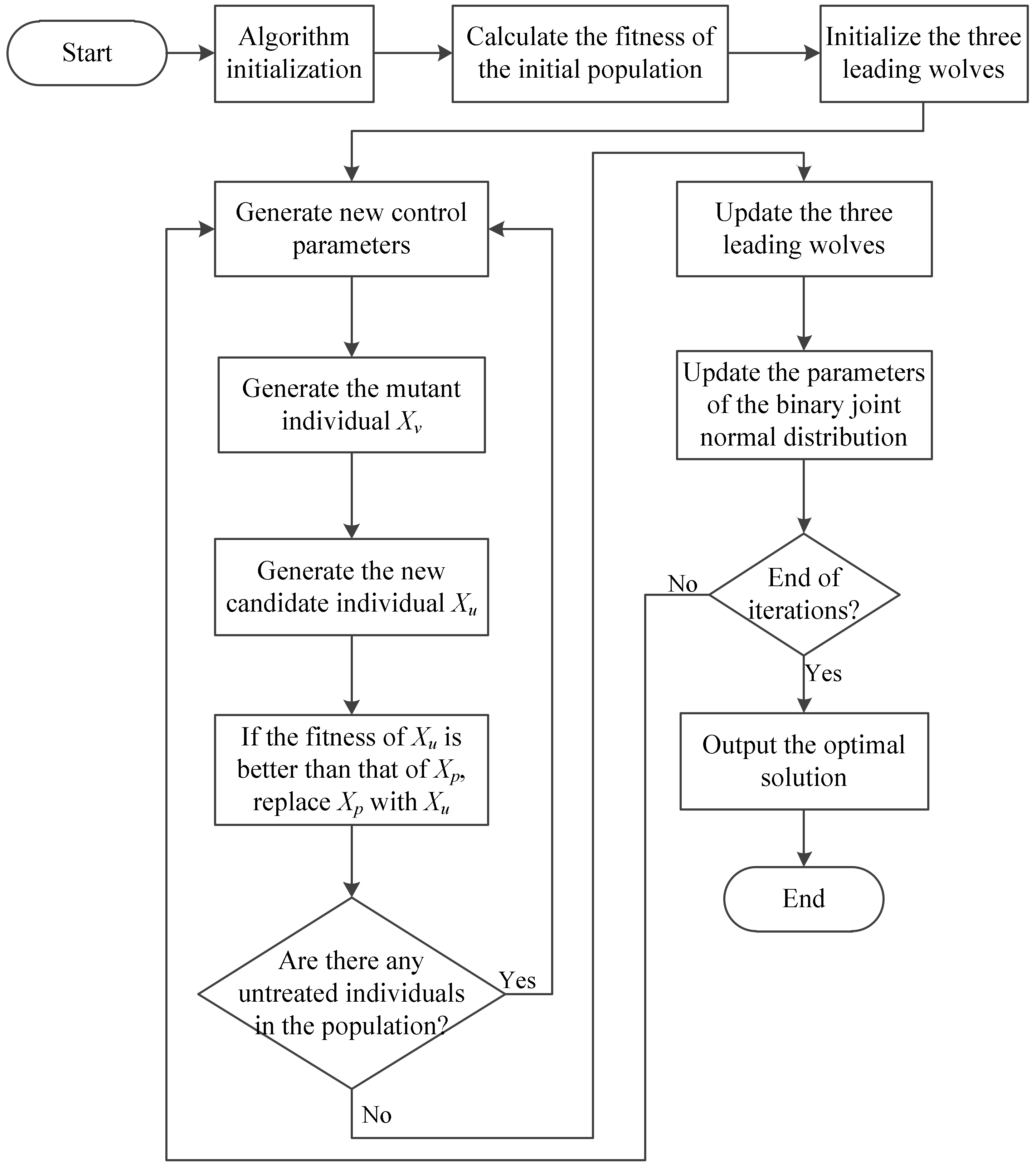
3.4. Steps of FSGWO
| Algorithm 2. Steps of the FSGWO algorithm. |
|
|
- (i)
- In step 1, the initial value of μ is [0.5, 0.5], and the initial value of ∑ is [0.1, 0; 0, 0.1]. The value of c is 0.1 or 0.2, which means taking 10% or 20% of as a fuzzy perturbation.
- (ii)
- In step 4.1, the values of the elements in , which are sampled from the binary joint normal distribution N(μ, ∑), may be out of (0, 1); the element’s value is corrected to 0.999 if it crosses the upper bound or 0.001 if it crosses the lower bound.
- (iii)
- In steps 4.2.1 and 4.2.2, the value of each element in Xν and Xu is between [lb, ub]; if the value of an element exceeds the upper bound, it is corrected to rand × ub, or rand × lb if the value of an element exceeds the lower bound, where rand is a random number following a standard uniform distribution.
- (iv)
- In step 4.4, the value of the element in μ is between (0, 1); if the value of an element in μ exceeds the upper bound, it is corrected to 0.99, or 0.01 if the value of an element exceeds the lower bound.
- (v)
- Comparing the FSGWO algorithm flow in Algorithm 2 with the original GWO algorithm flow in Algorithm 1 shows that the operations lacking in Algorithm 1 mainly include fuzzy control parameters in step 4.1, the fuzzy crossover operation in step 3, noninferior selection in step 4.2.4, and fuzzy perturbation in step 4.4.
3.5. Analysis of Computational Complexity
4. Results
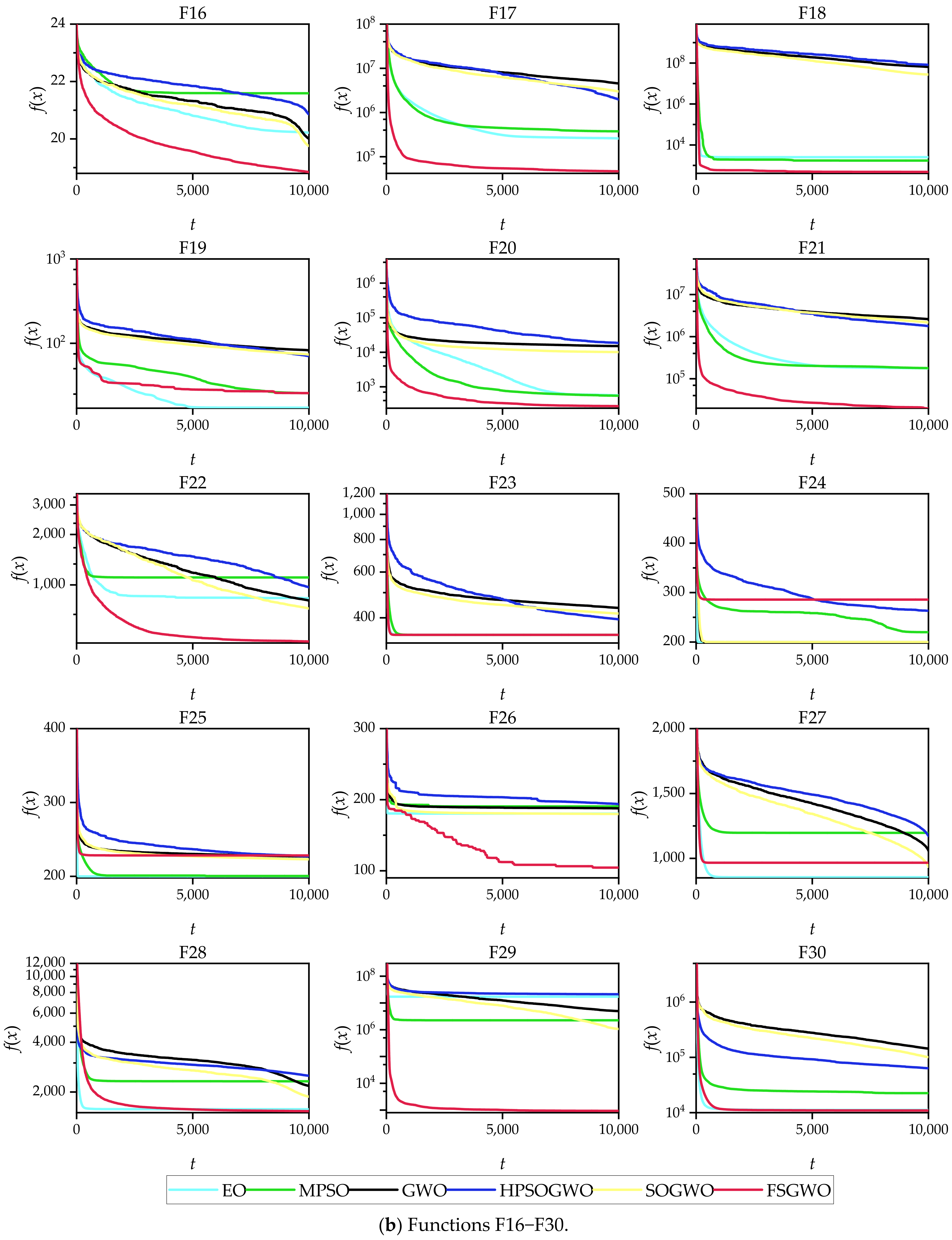
4.1. Results of the Test Functions of CEC2014
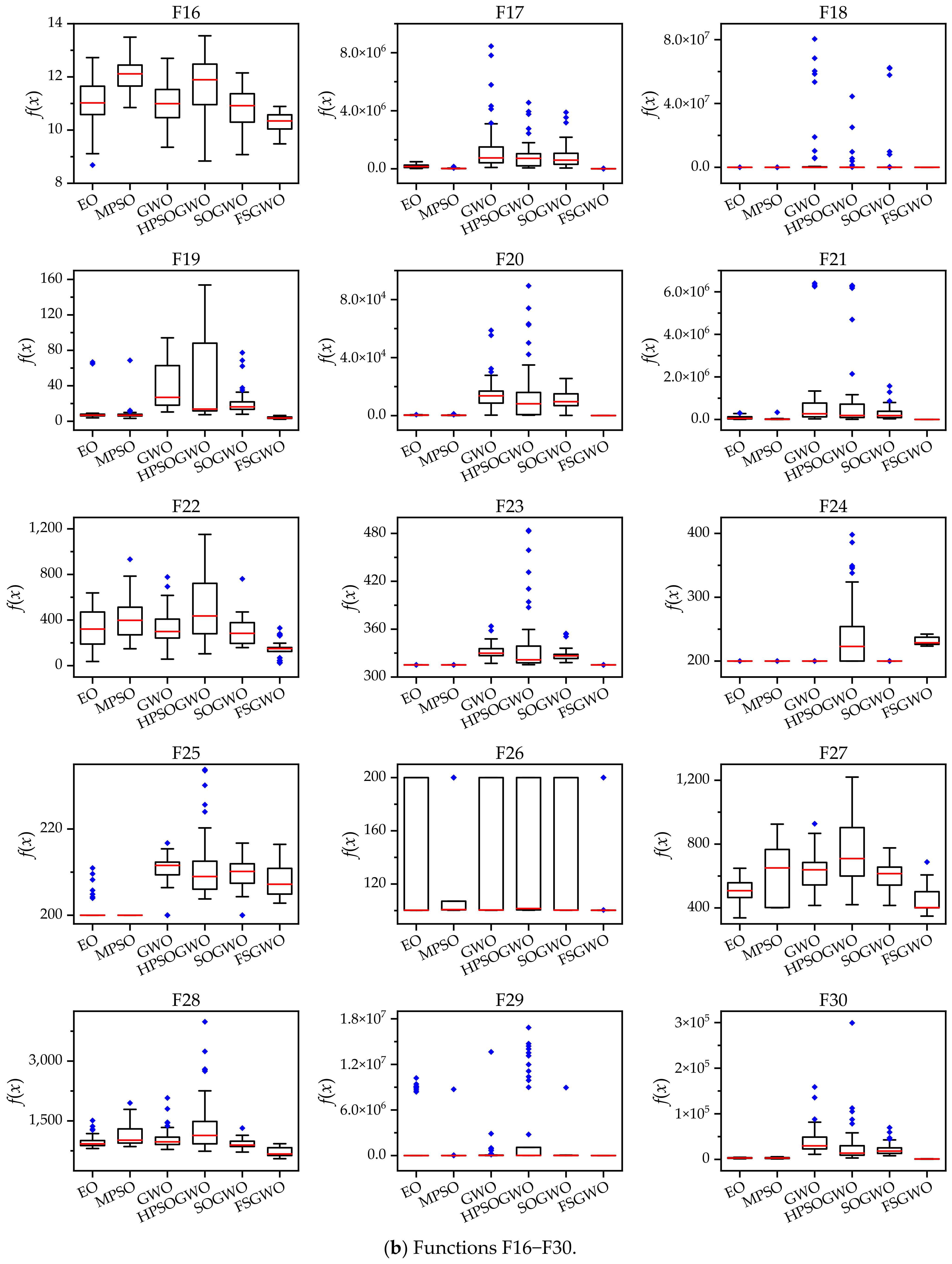
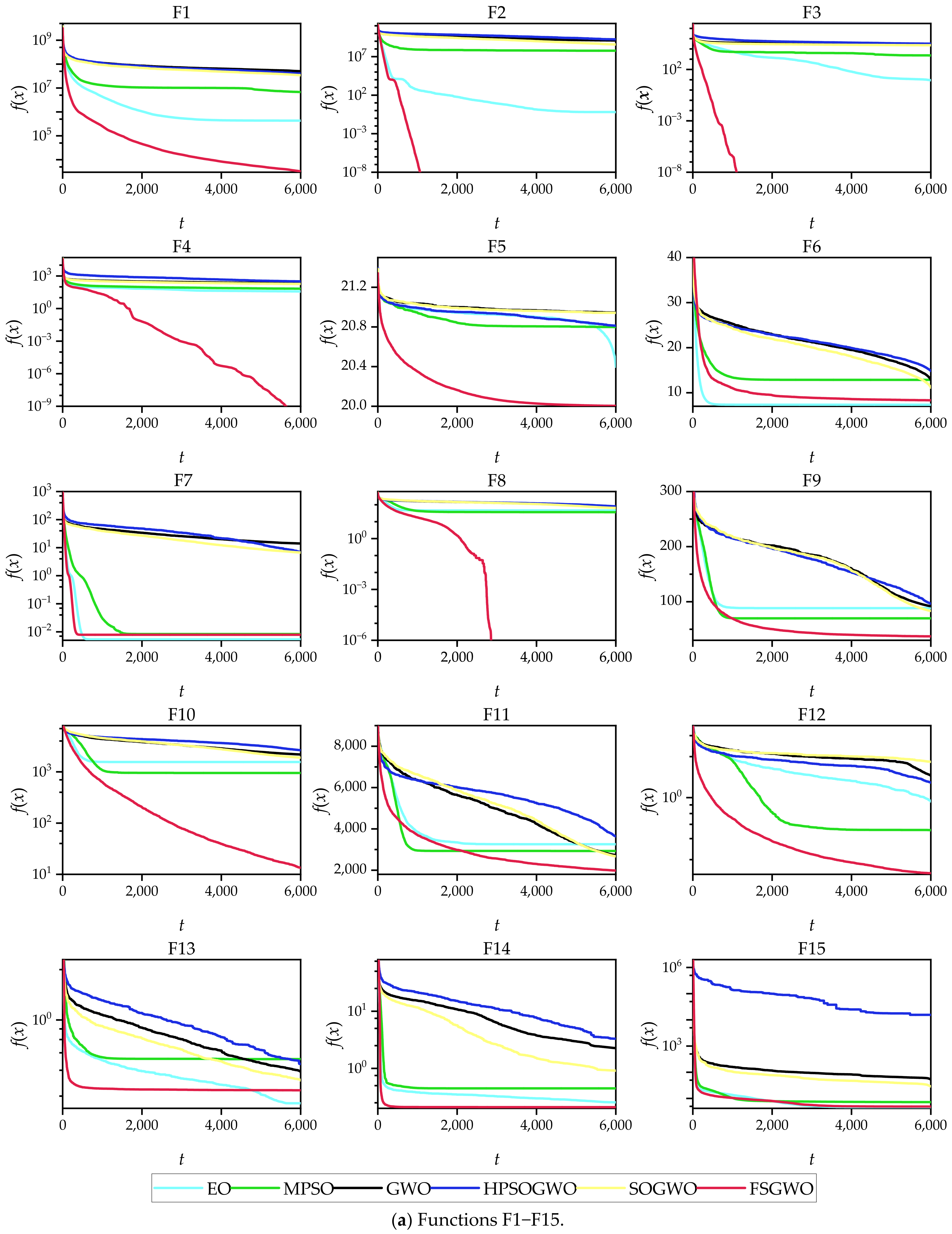
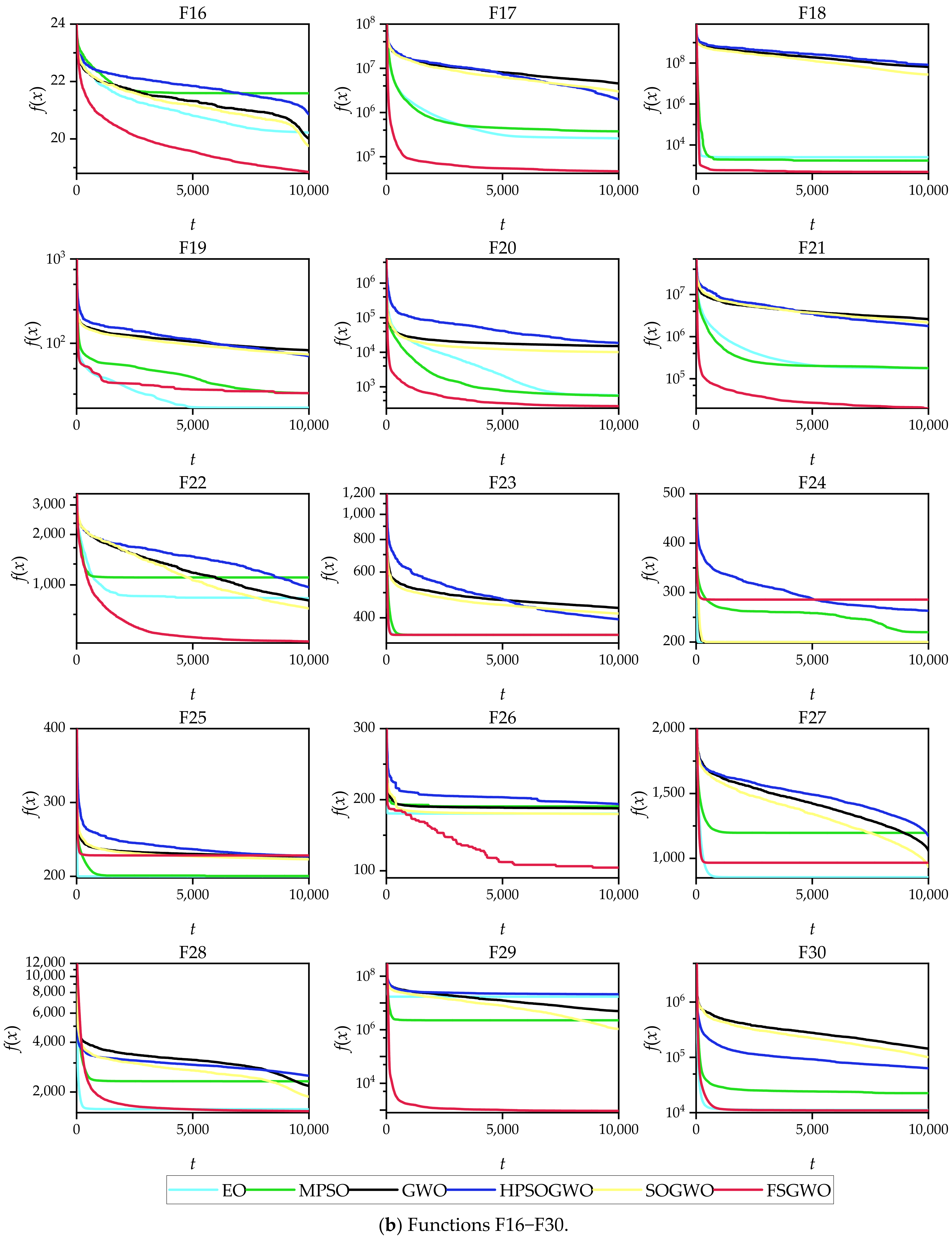
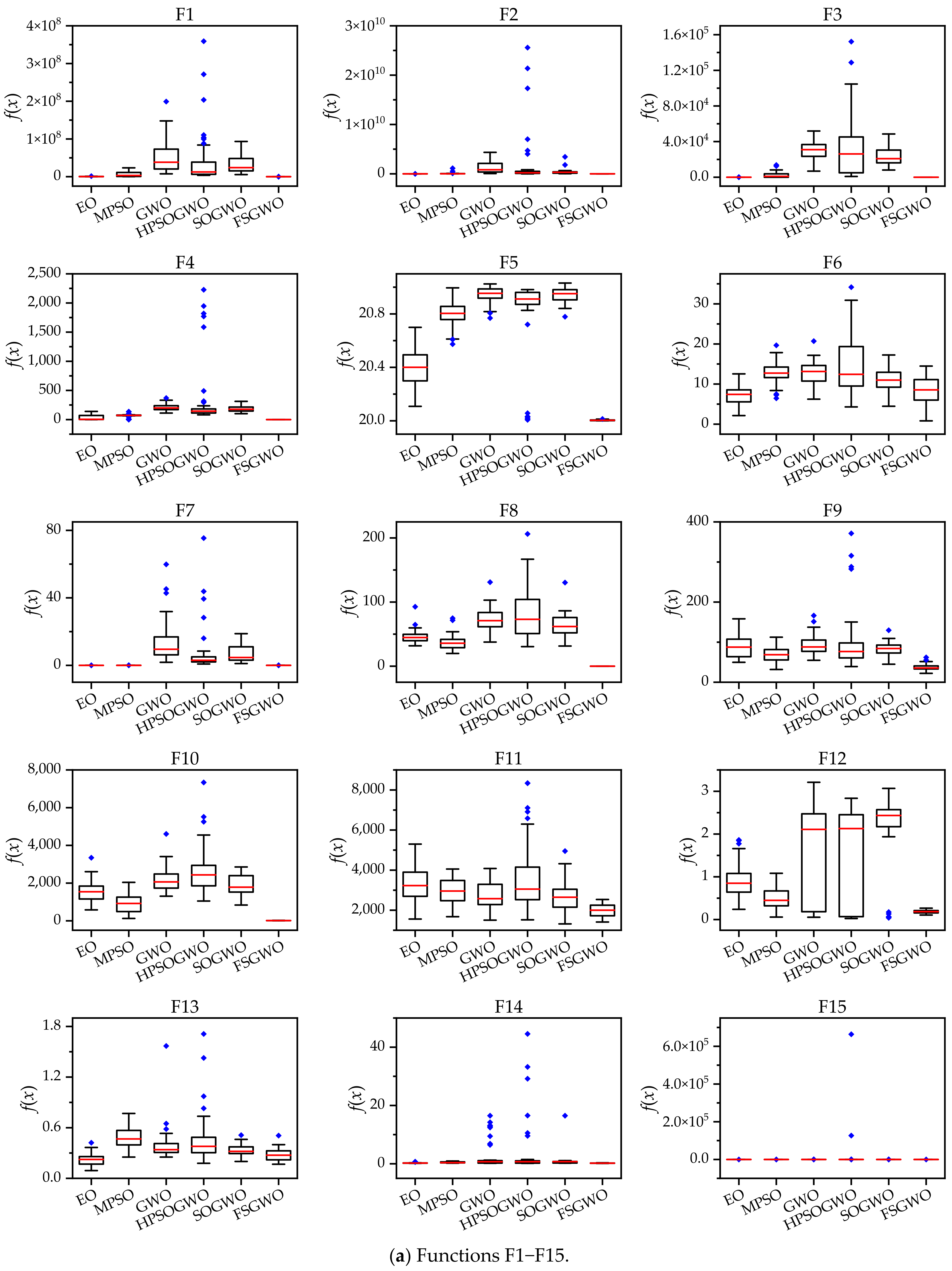
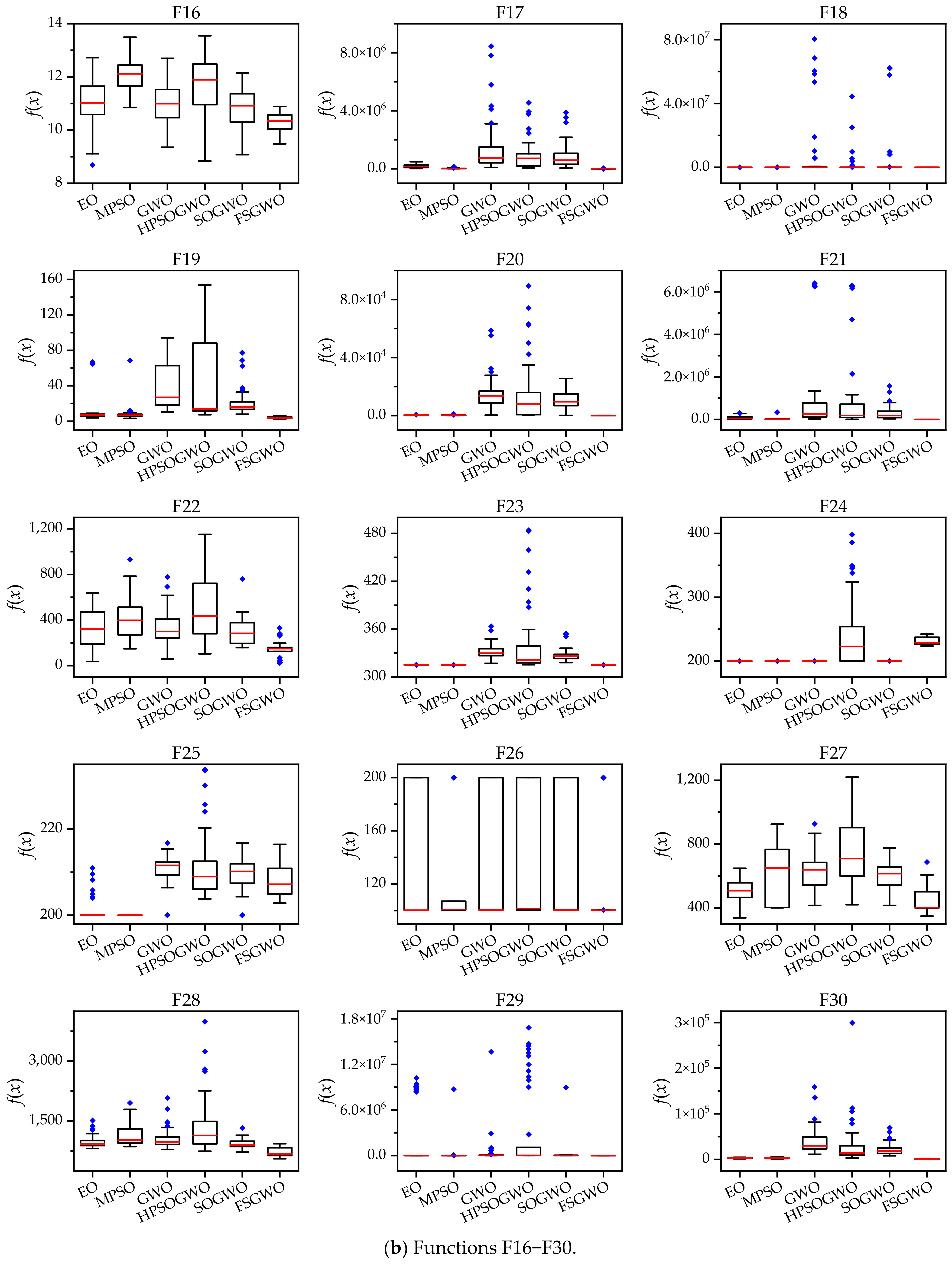
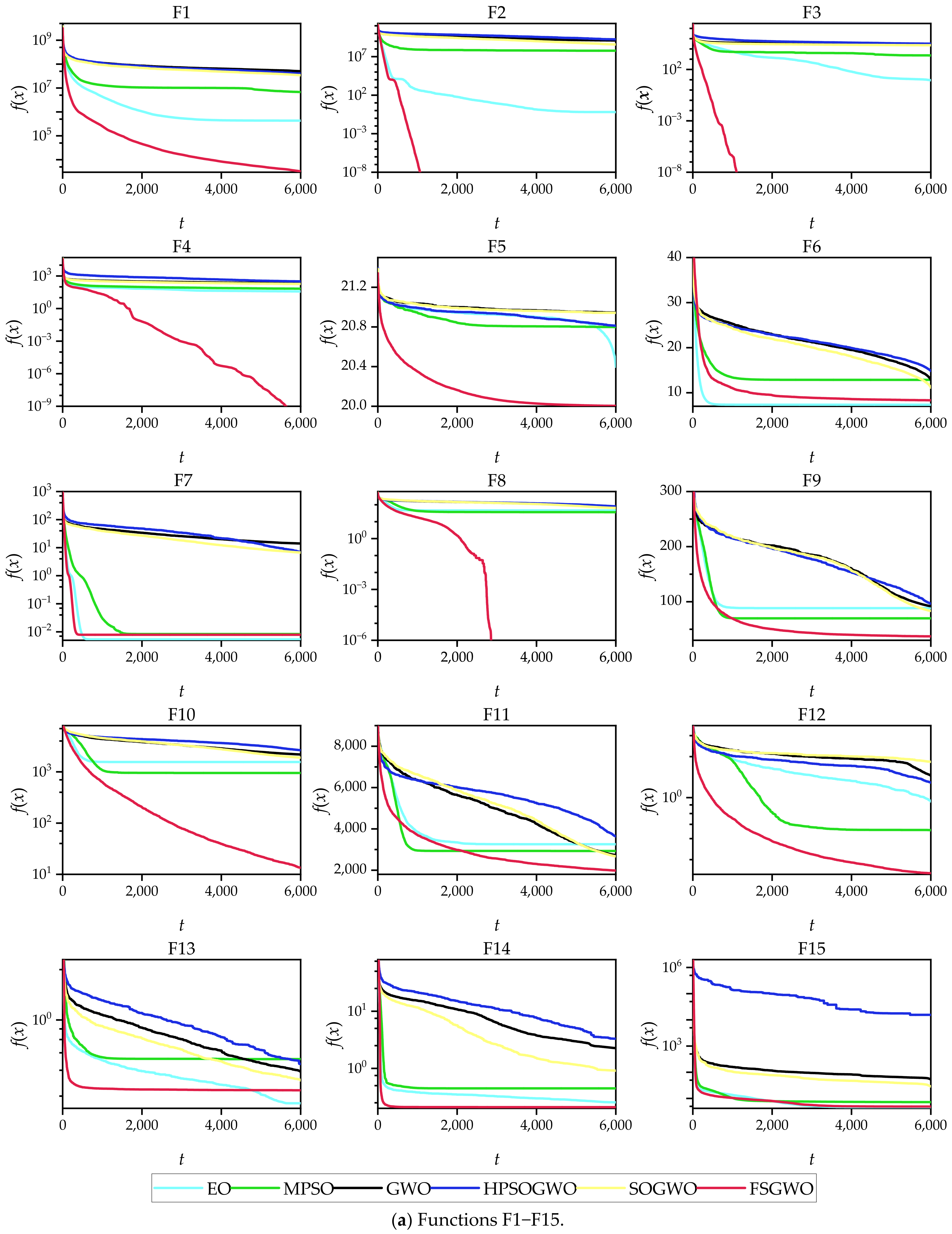
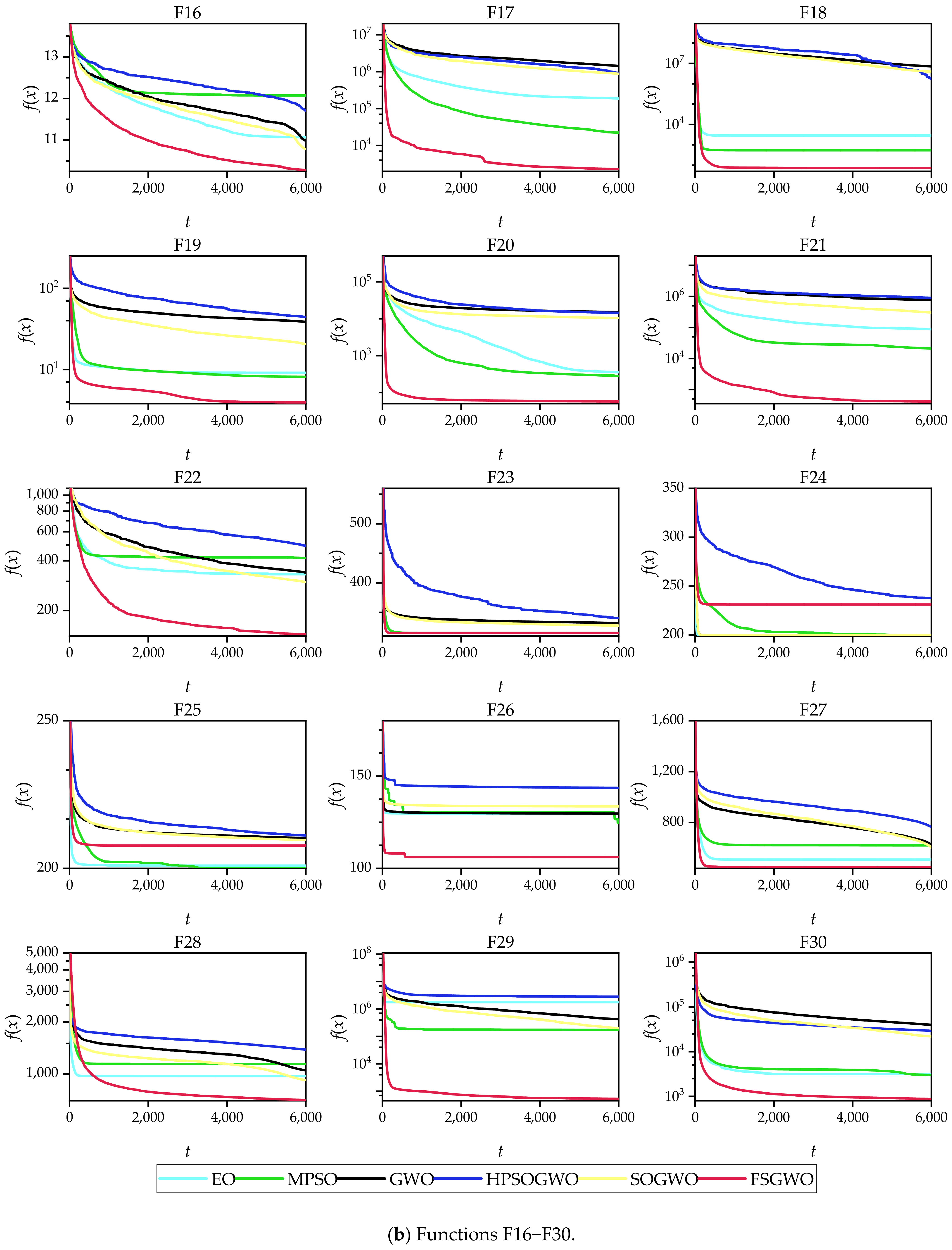
4.1.1. Results of 30-Dimensional Test Functions
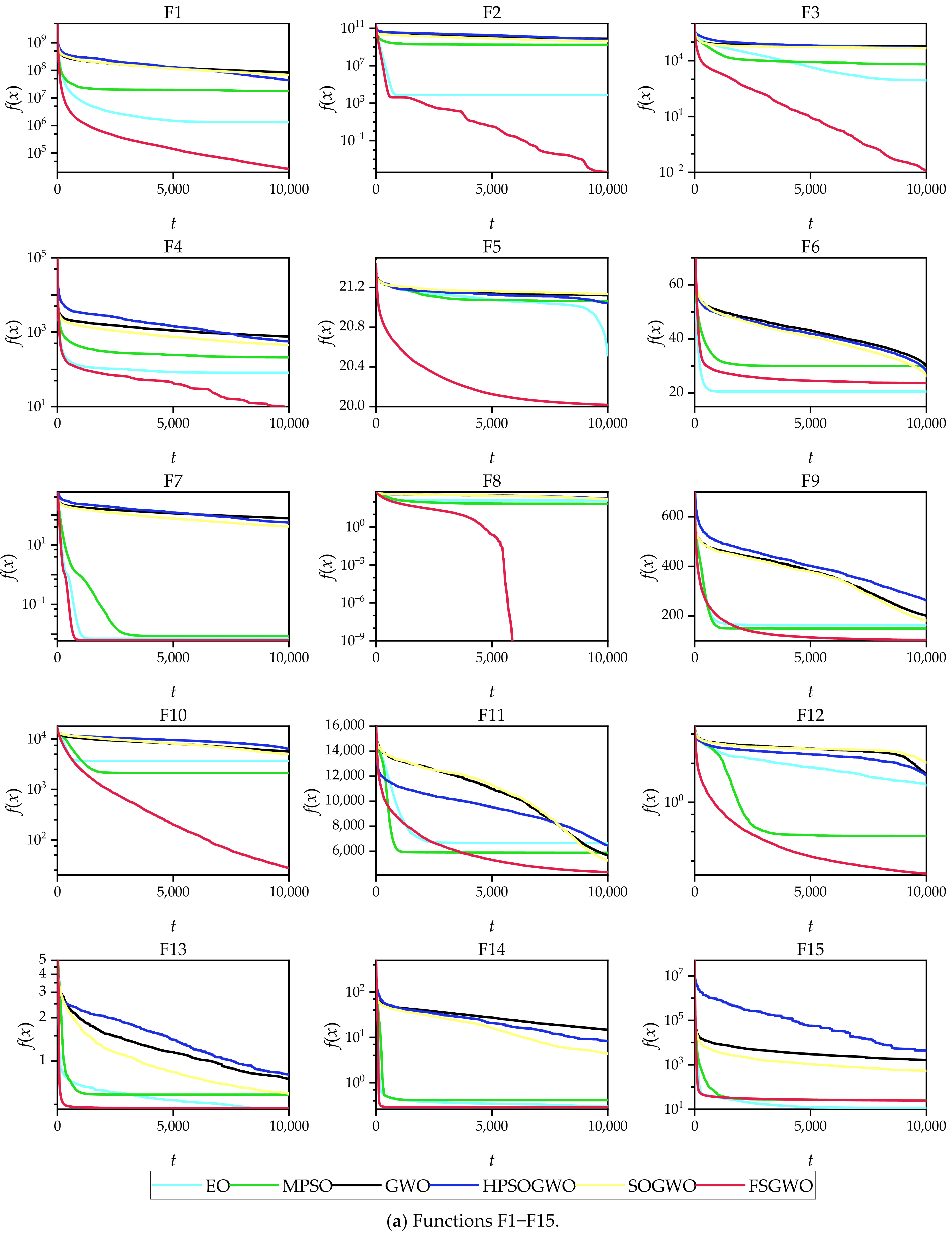
4.1.2. Results of 50-Dimensional Test Functions
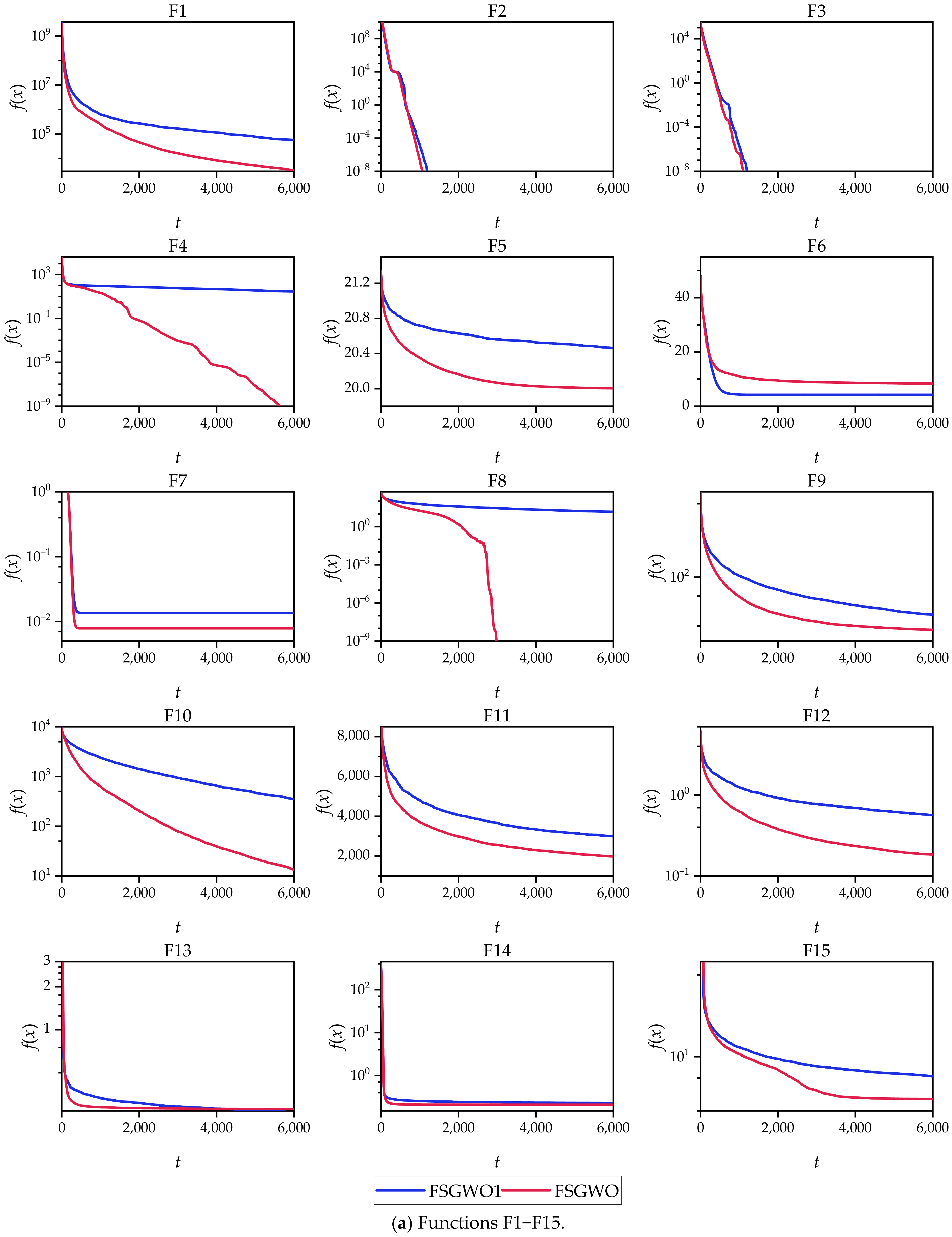
4.1.3. Verification of the Validity of the Fuzzy Control Parameters
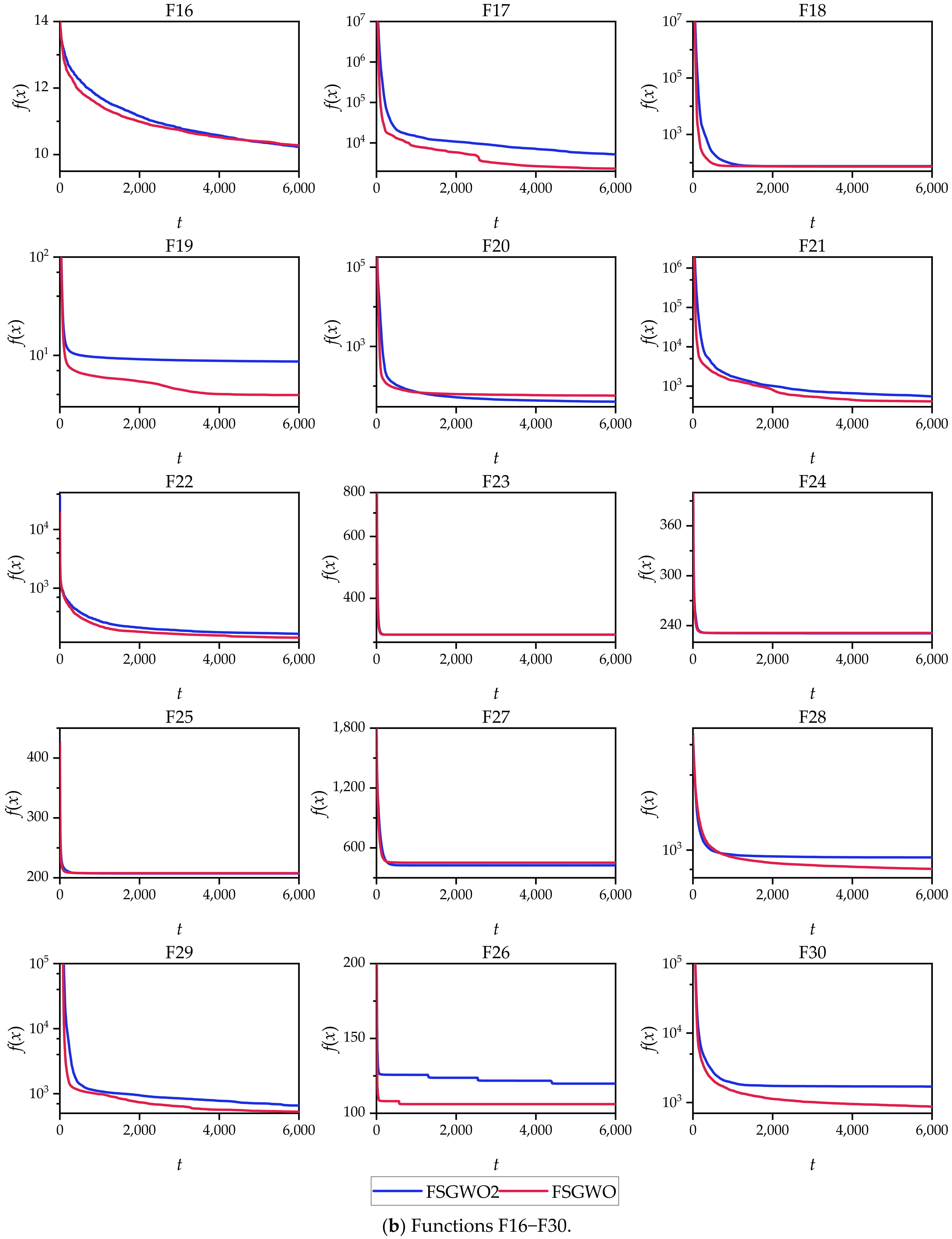
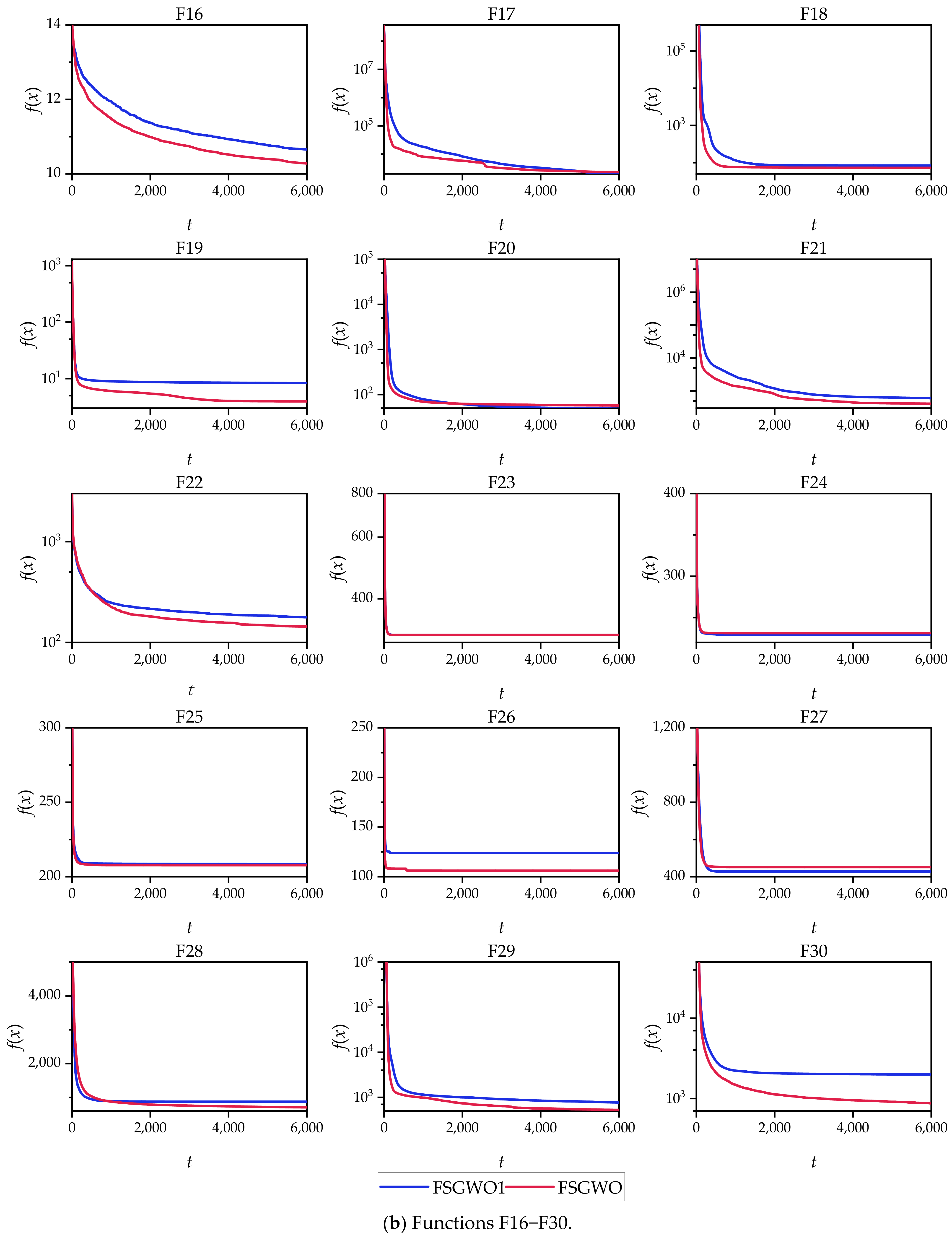
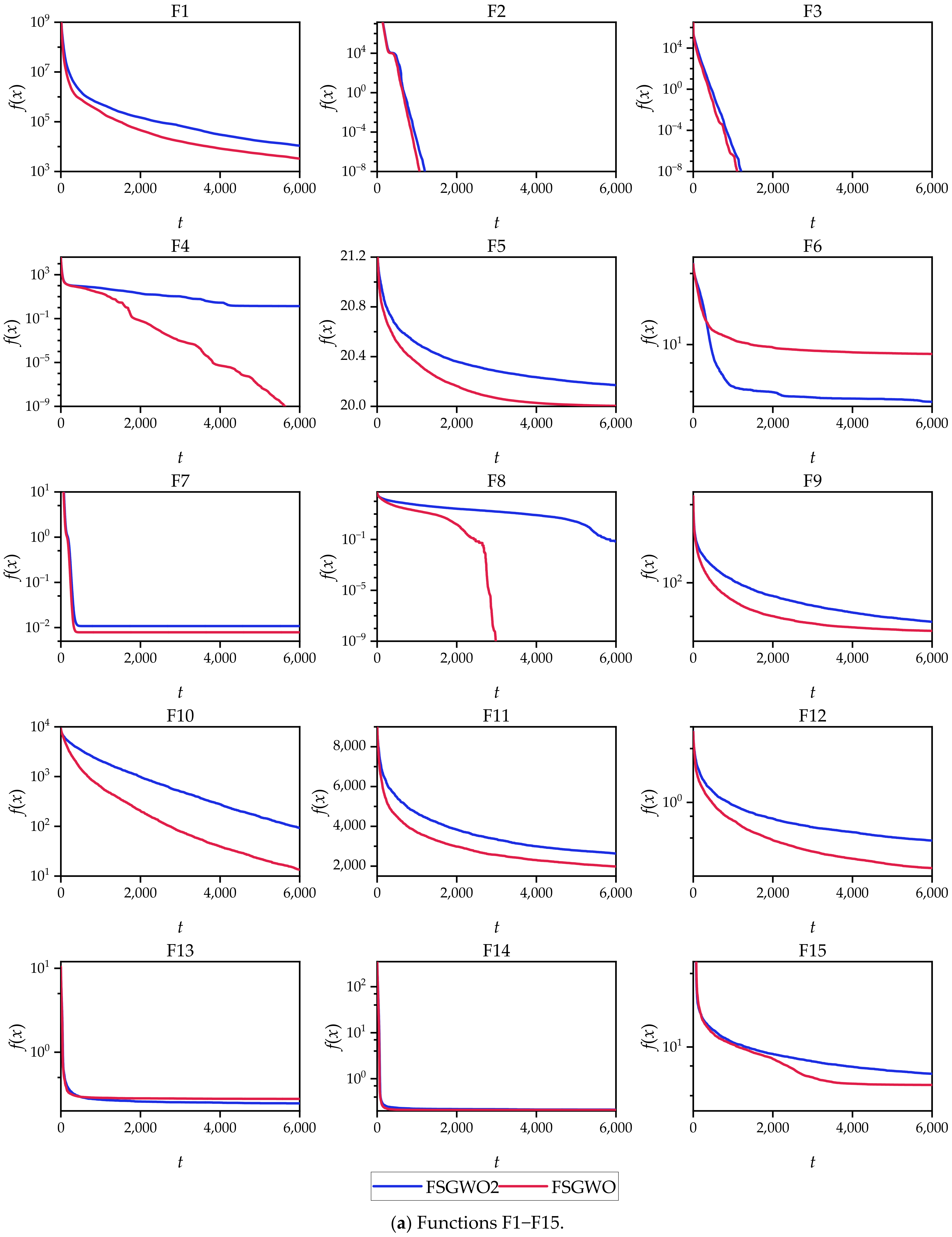
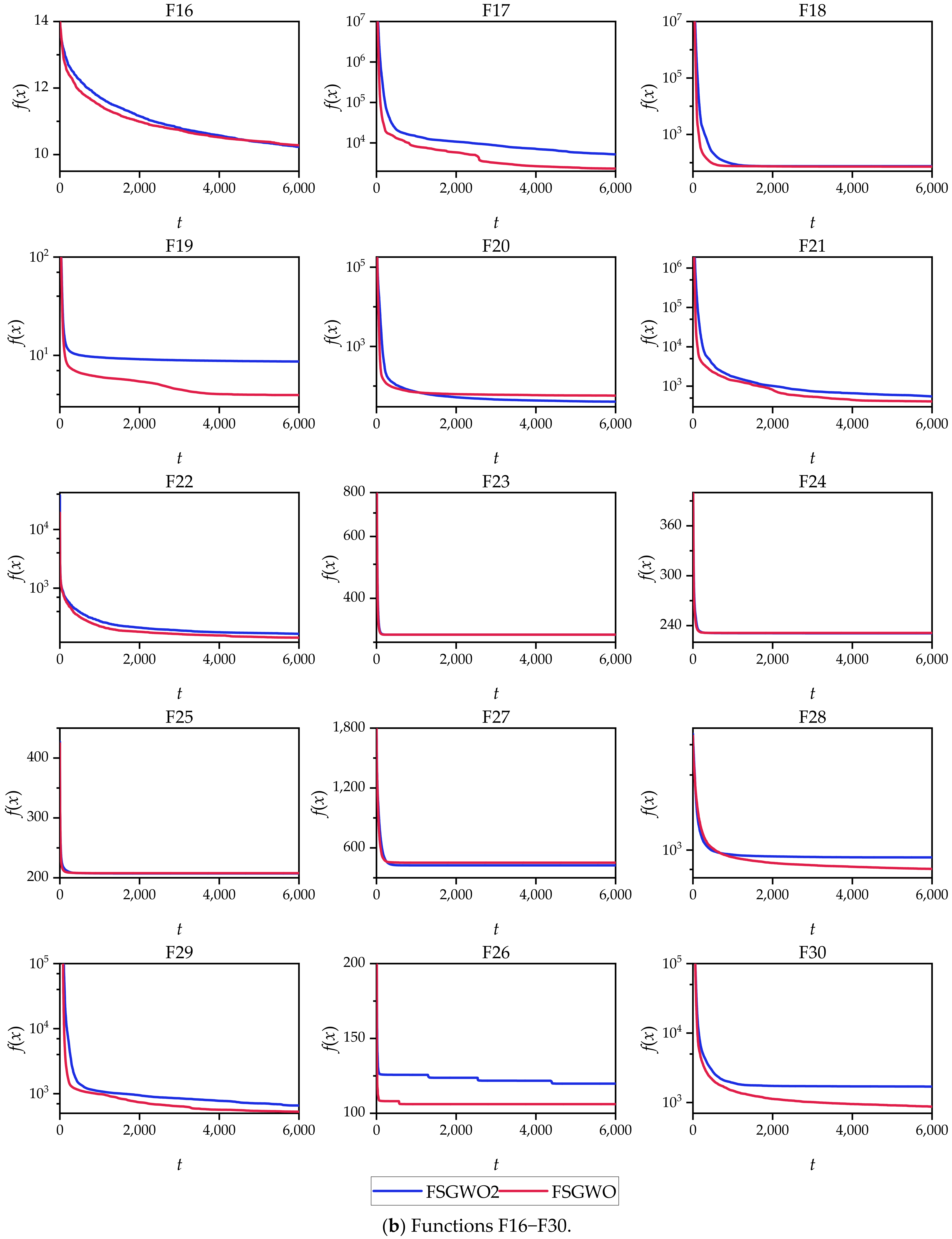
4.1.4. Verification of the Effectiveness of the Fuzzy Perturbation Strategy
4.2. Results for Economic Load Dispatch Problems of Power Systems
4.2.1. The Basic Model of the ELD Problem
- (i)
- Power balance constraints.
- (ii)
- Generating capacity constraints.
- (iii)
- Ramp rate limits.
- (iv) Prohibited operating zones.
4.2.2. Results of ELD Cases
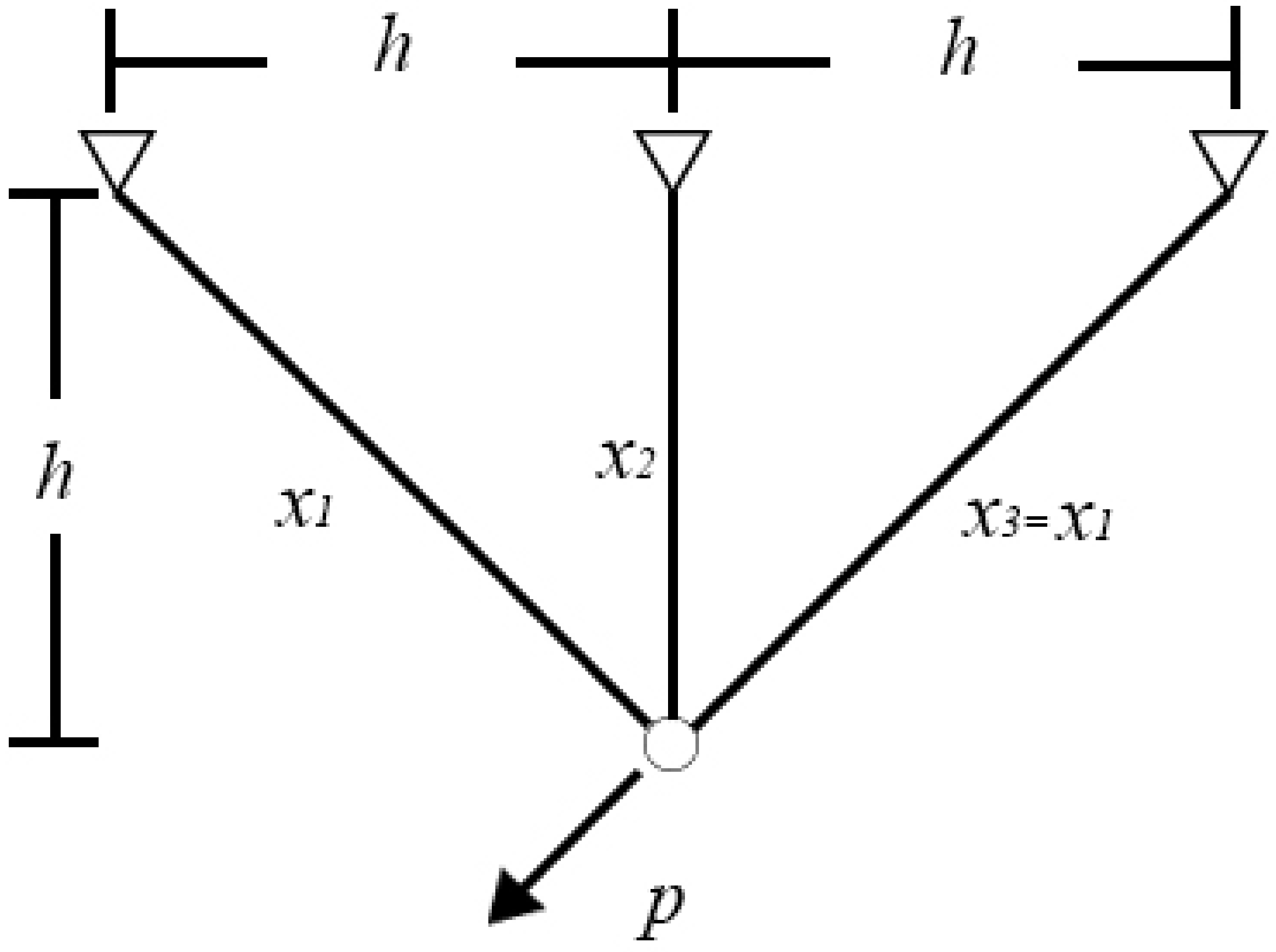
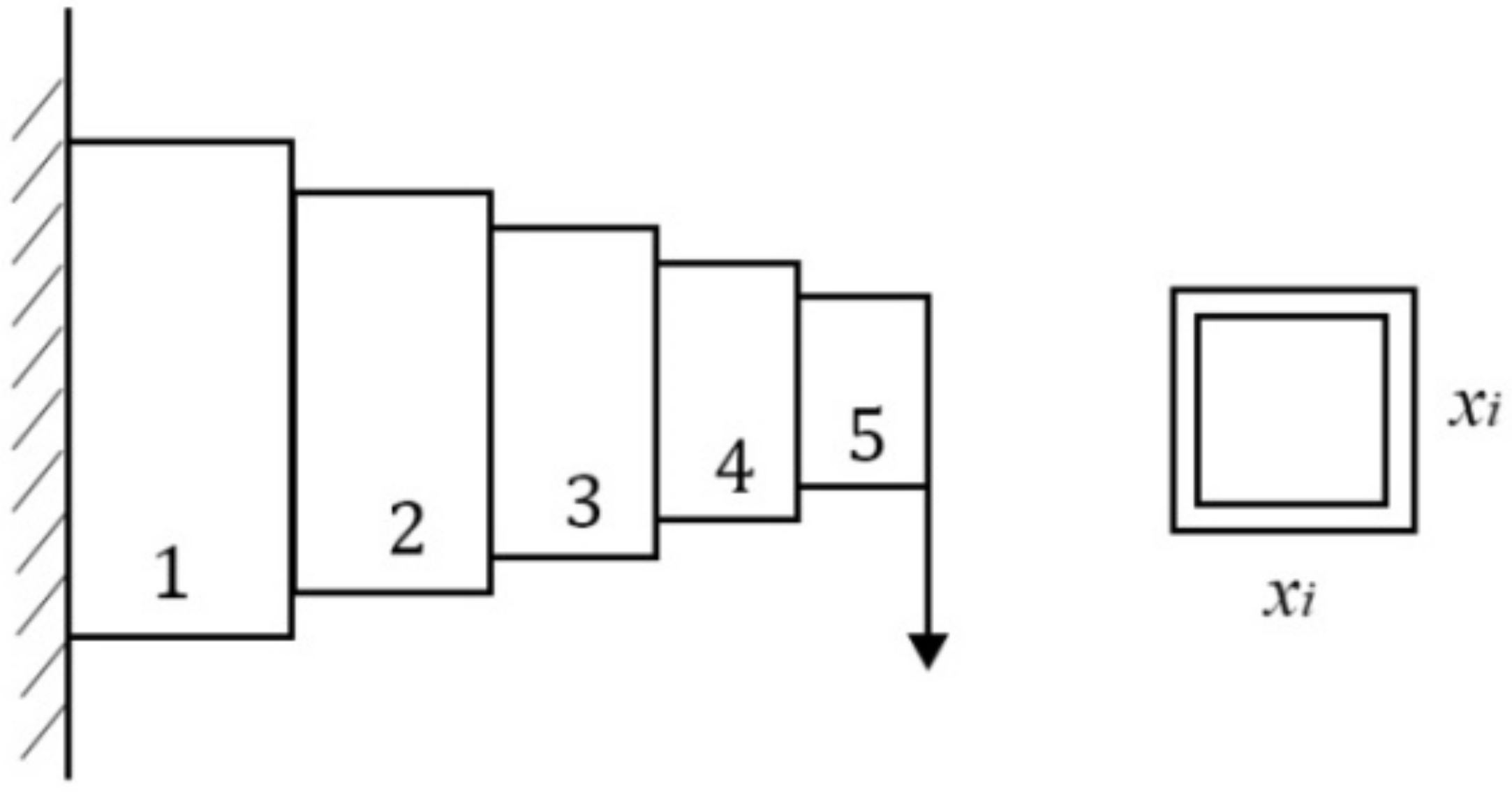
4.3. Design of Three-Bar Truss
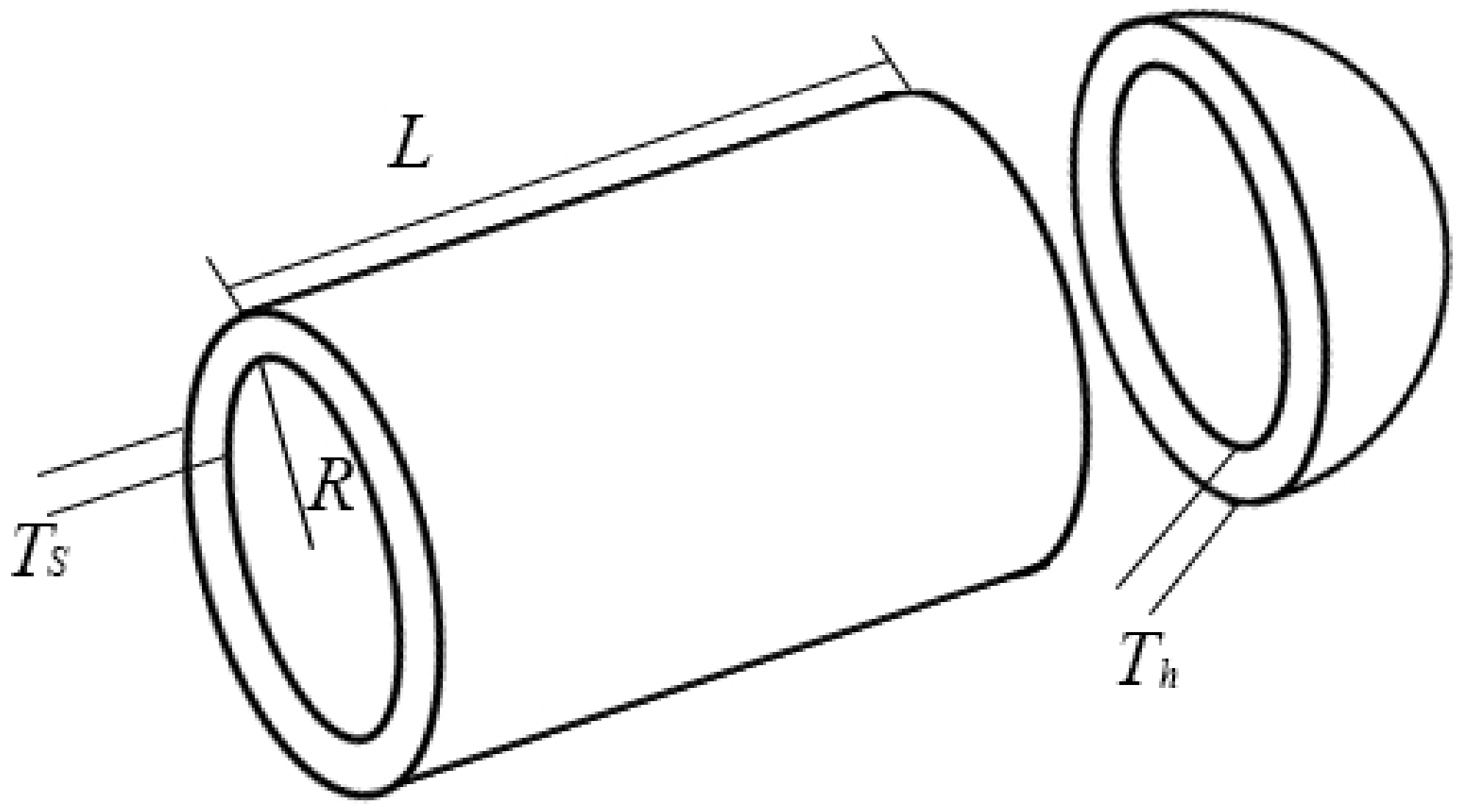
4.4. Design of Pressure Vessel
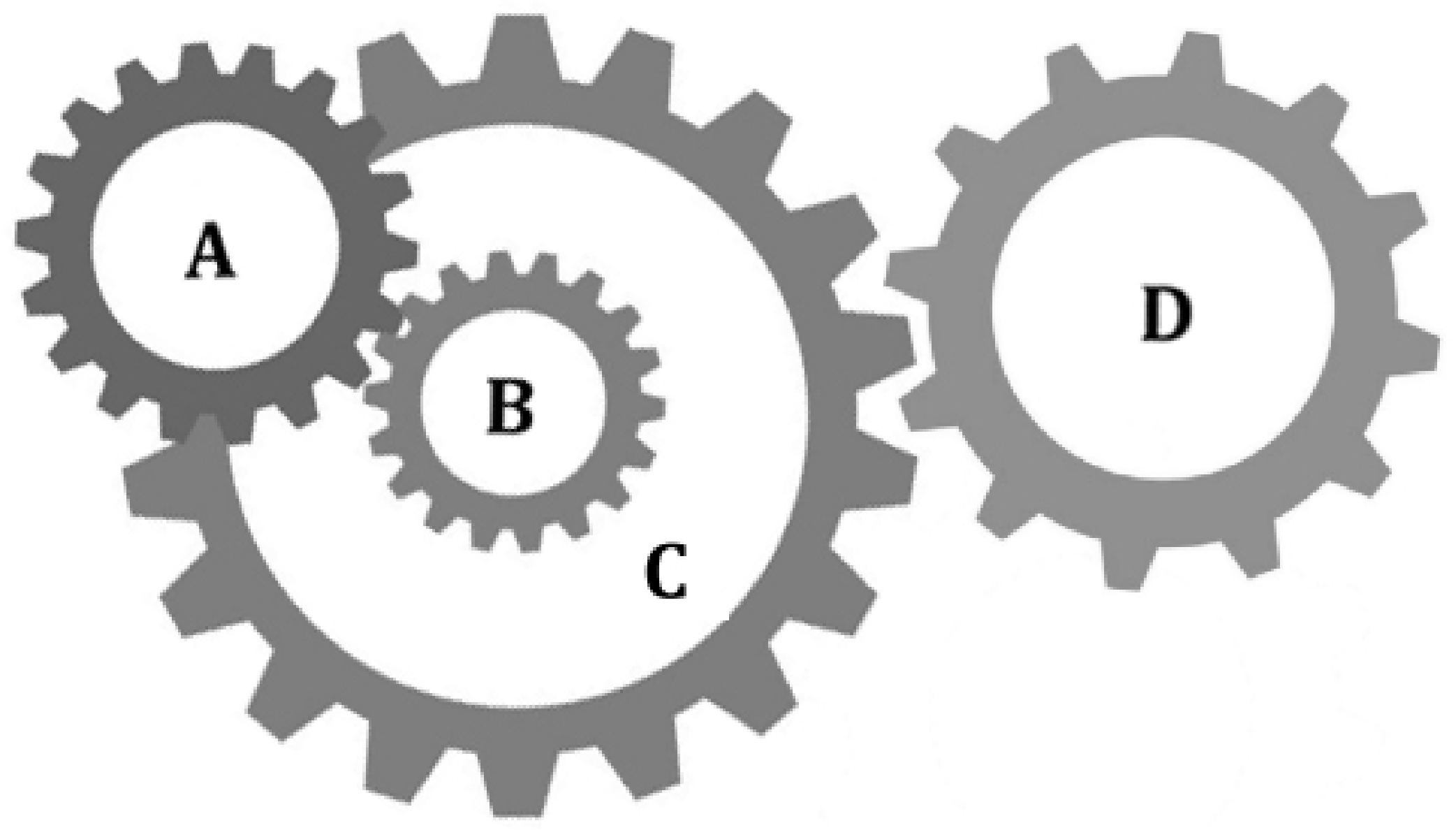
4.5. Design of Gear Train
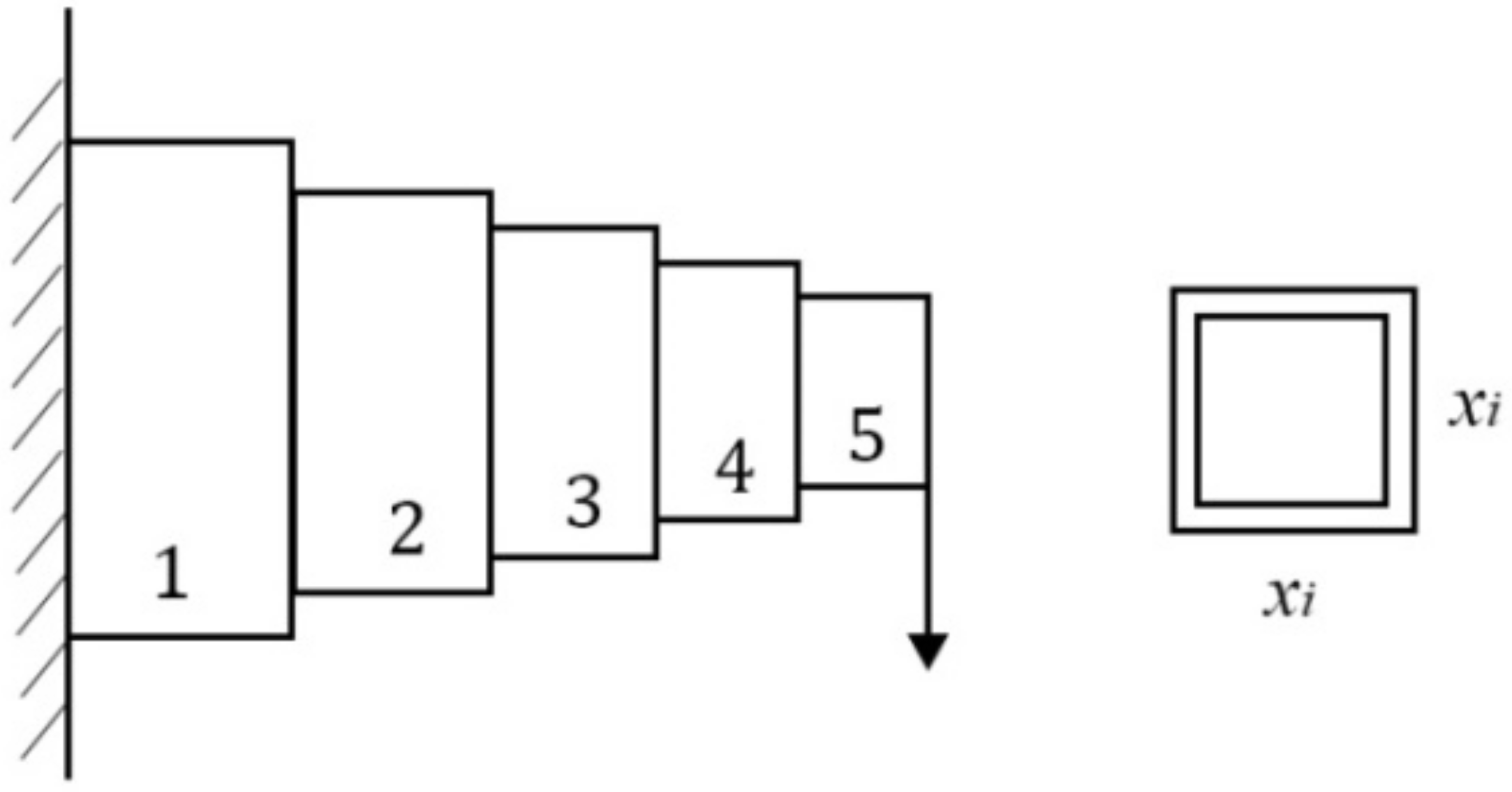
4.6. Design of Cantilever Beam
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nekouie, N.; Yaghoobi, M. A new method in multimodal optimization based on firefly algorithm. Artif. Intell. Rev. 2016, 46, 267–287. [Google Scholar] [CrossRef]
- De Oliveira, R.P.; Lohmann, G.; Oliveira, A.V.M. A systematic review of the literature on air transport networks (1973–2021). J. Air Transp. Manag. 2022, 103, 102248. [Google Scholar] [CrossRef]
- Chen, D.C.; Li, Y.Y. A development on multimodal optimization technique and its application in structural damage detection. Appl. Soft. Comput. 2020, 91, 106264. [Google Scholar] [CrossRef]
- Farshi, T.R.; Drake, J.H.; Ozcan, E. A multimodal particle swarm optimization-based approach for image segmentation. Expert Syst. Appl. 2020, 149, 113233. [Google Scholar] [CrossRef]
- Bian, Q.; Nener, B.; Wang, X.M. A quantum inspired genetic algorithm for multimodal optimization of wind disturbance alleviation flight control system. Chin. J. Aeronaut. 2019, 32, 2480–2488. [Google Scholar] [CrossRef]
- Perez, E.; Posada, M.; Herrera, F. Analysis of new niching genetic algorithms for finding multiple solutions in the job shop scheduling. J. Intell. Manuf. 2012, 23, 341–356. [Google Scholar] [CrossRef]
- Mashayekhi, M.; Yousefi, R. Topology and size optimization of truss structures using an improved crow search algorithm. Struct. Eng. Mech. 2021, 77, 779–795. [Google Scholar]
- Nazmul, R.; Chetty, M.; Chowdhury, A.R. Multimodal Memetic framework for low-resolution protein structure prediction. Swarm Evol. Comput. 2020, 52, 100608. [Google Scholar] [CrossRef]
- Fahad, S.; Yang, S.Y.; Khan, R.A.; Khan, S.; Khan, S.A. A multimodal smart quantum particle swarm optimization for electromagnetic design optimization problems. Energies 2021, 14, 4613. [Google Scholar] [CrossRef]
- Tutkun, N. Optimization of multimodal continuous functions using a new crossover for the real-coded genetic algorithms. Expert Syst. Appl. 2009, 36, 8172–8177. [Google Scholar] [CrossRef]
- Rajabi, A.; Witt, C. Self-Adjusting evolutionary algorithms for multimodal optimization. Algorithmica 2022, 84, 1694–1723. [Google Scholar] [CrossRef]
- Seo, J.H.; Im, C.H.; Heo, C.G.; Kim, J.K.; Jung, H.K.; Lee, C.G. Multimodal function optimization based on particle swarm optimization. IEEE Trans. Magn. 2006, 42, 1095–1098. [Google Scholar] [CrossRef]
- Yang, Q.; Chen, W.N.; Yu, Z.T.; Gu, T.L.; Li, Y.; Zhang, H.X.; Zhang, J. Adaptive multimodal continuous ant colony optimization. IEEE Trans. Evol. Comput. 2017, 21, 191–205. [Google Scholar] [CrossRef]
- Cuevas, E.; Reyna-Orta, A. A Cuckoo search algorithm for multimodal optimization. Sci. World J. 2014, 1, 497514. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, P.T.H.; Sudholt, D. Memetic algorithms outperform evolutionary algorithms in multimodal optimisation. Artif. Intell. 2020, 287, 103345. [Google Scholar] [CrossRef]
- Rim, C.; Piao, S.; Li, G.; Pak, U. A niching chaos optimization algorithm for multimodal optimization. Soft Comput. 2018, 22, 621–633. [Google Scholar] [CrossRef]
- Arora, A.; Miri, R. Cryptography and tay-grey wolf optimization based multimodal biometrics for effective security. Multimed. Tools Appl. 2022, 5, in press. [Google Scholar] [CrossRef]
- Kumar, V.; Chhabra, J.K.; Kumar, D. Variance-Based harmony search algorithm for unimodal and multimodal optimization problems with application to clustering. Cybern. Syst. 2014, 45, 486–511. [Google Scholar] [CrossRef]
- Li, J.Z.; Tan, Y. Loser-Out tournament-based fireworks algorithm for multimodal function optimization. IEEE Trans. Evol. Comput. 2018, 22, 679–691. [Google Scholar] [CrossRef]
- Bala, I.; Yadav, A. Comprehensive learning gravitational search algorithm for global optimization of multimodal functions. Neural Comput. Appl. 2020, 32, 7347–7382. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Software 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, R.; Nazir, A.; Mahadzir, S.; Shorfuzzaman, M.; Islam, J. Niching grey wolf optimizer for multimodal optimization problems. Appl. Sci. 2021, 11, 4975. [Google Scholar] [CrossRef]
- Rajakumar, R.; Sekaran, K.; Hsu, C.H.; Kadry, S. Accelerated grey wolf optimization for global optimization problems. Technol. Forecast. Soc. Chang. 2021, 169, 120824. [Google Scholar] [CrossRef]
- Yu, X.B.; Xu, W.Y.; Li, C.L. Opposition-based learning grey wolf optimizer for global optimization. Knowl.-Based Syst. 2021, 226, 107139. [Google Scholar] [CrossRef]
- Rodriguez, A.; Camarena, O.; Cuevas, E.; Aranguren, I.; Valdivia-G, A.; Morales-Castaneda, B.; Zaldivar, D.; Perez-Cisneros, M. Group-based synchronous-asynchronous grey wolf optimizer. Appl. Math. Modell. 2021, 93, 226–243. [Google Scholar] [CrossRef]
- Deshmukh, N.; Vaze, R.; Kumar, R.; Saxena, A. Quantum entanglement inspired grey wolf optimization algorithm and its application. Evol. Intell. 2022, in press. [CrossRef]
- Hu, J.; Chen, H.L.; Heidari, A.A.; Wang, M.J.; Zhang, X.Q.; Chen, Y.; Pan, Z.F. Orthogonal learning covariance matrix for defects of grey wolf optimizer: Insights, balance, diversity, and feature selection. Knowl.-Based Syst. 2021, 213, 106684. [Google Scholar] [CrossRef]
- Mittal, N.; Singh, U.; Sohi, B.S. Modified grey wolf optimizer for global engineering optimization. Appl. Comput. Intell. Soft Comput. 2016, 2016, 7950348. [Google Scholar] [CrossRef]
- Saxena, A.; Kumar, R.; Mirjalili, S. A harmonic estimator design with evolutionary operators equipped grey wolf optimizer. Expert Syst. Appl. 2020, 145, 113125. [Google Scholar] [CrossRef]
- Hu, P.; Chen, S.Y.; Huang, H.X.; Zhang, G.Y.; Liu, L. Improved alpha-guided grey wolf optimizer. IEEE Access 2019, 7, 5421–5437. [Google Scholar] [CrossRef]
- Saxena, A.; Kumar, R.; Das, S. Beta-Chaotic map enabled grey wolf optimizer. Appl. Soft Comput. 2019, 75, 84–105. [Google Scholar] [CrossRef]
- Long, W.; Jiao, J.J.; Liang, X.M.; Cai, S.H.; Xu, M. A random opposition-based learning grey wolf optimizer. IEEE Access 2019, 7, 113810–113825. [Google Scholar] [CrossRef]
- Heidari, A.A.; Pahlavani, P. An efficient modified grey wolf optimizer with lévy flight for optimization tasks. Appl. Soft Comput. 2017, 60, 115–134. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K. Enhanced leadership-inspired grey wolf optimizer for global optimization problems. Eng. Comput. 2020, 36, 1777–1800. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K. Cauchy grey wolf optimiser for continuous optimisation problems. J. Exp. Theor. Artif. Intell. 2018, 30, 1051–1075. [Google Scholar] [CrossRef]
- Dhargupta, S.; Ghosh, M.; Mirjalili, S.; Sarkar, R. Selective opposition based grey wolf optimization. Expert Syst. Appl. 2020, 151, 113389. [Google Scholar] [CrossRef]
- Long, W.; Wu, T.B.; Cai, S.H.; Liang, X.M.; Jiao, J.J.; Xu, M. A novel grey wolf optimizer algorithm with refraction learning. IEEE Access 2019, 7, 57805–57819. [Google Scholar] [CrossRef]
- Ibrahim, R.A.; Abd Elaziz, M.; Lu, S.F. Chaotic opposition-based grey-wolf optimization algorithm based on differential evolution and disruption operator for global optimization. Expert Syst. Appl. 2018, 108, 1–27. [Google Scholar] [CrossRef]
- Mohammed, H.; Rashid, T. A novel hybrid GWO with WOA for global numerical optimization and solving pressure vessel design. Neural Comput. Appl. 2020, 32, 14701–14718. [Google Scholar] [CrossRef]
- Zhao, Y.T.; Li, W.G.; Liu, A. Improved grey wolf optimization based on the two-stage search of hybrid CMA-ES. Soft Comput. 2020, 24, 1097–1115. [Google Scholar] [CrossRef]
- Makhadmeh, S.N.; Khader, A.T.; Al-Betar, M.A.; Naim, S.; Abasi, A.K.; Alyasseri, Z.A.A. A novel hybrid grey wolf optimizer with min-conflict algorithm for power scheduling problem in a smart home. Swarm Evol. Comput. 2021, 60, 100793. [Google Scholar] [CrossRef]
- Purushothaman, R.; Rajagopalan, S.P.; Dhandapani, G. Hybridizing gray wolf optimization (GWO) with grasshopper optimization algorithm (GOA) for text feature selection and clustering. Appl. Soft Comput. 2020, 96, 106651. [Google Scholar] [CrossRef]
- Wang, Z.W.; Qin, C.; Wan, B.T.; Song, W.W.; Yang, G.Q. An adaptive fuzzy chicken swarm optimization algorithm. Math. Probl. Eng. 2021, 2021, 8896794. [Google Scholar] [CrossRef]
- Brindha, S.; Amali, S.M.J. A robust and adaptive fuzzy logic based differential evolution algorithm using population diversity tuning for multi-objective optimization. Eng. Appl. Artif. Intell. 2021, 102, 104240. [Google Scholar]
- Ferrari, A.C.K.; da Silva, C.A.G.; Osinski, C.; Pelacini, D.A.F.; Leandro, G.V.; Coelho, L.D. Tuning of control parameters of the whale optimization algorithm using fuzzy inference system. J. Intell. Fuzzy Syst. 2022, 42, 3051–3066. [Google Scholar] [CrossRef]
- Liang, J.; Suganthan, P.N. Problem definitions and evaluation criteria for the CEC 2014 special session and competition on single objective real-parameter numerical optimization. In Technical Report 201311; Computational Intelligence Laboratory, Zhengzhou University: Zhengzhou, China, 2013. [Google Scholar]
- Dahmani, S.; Yebdri, D. Hybrid algorithm of particle swarm optimization and grey wolf optimizer for reservoir operation management. Water Resour. Manag. 2020, 34, 4545–4560. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Stephens, B.; Mirjalili, S. Equilibrium optimizer: A novel optimization algorithm. Knowl.-Based Syst. 2020, 191, 105190. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, X.; Tu, L. A modified particle swarm optimization using adaptive strategy. Expert Syst. Appl. 2020, 152, 113353. [Google Scholar] [CrossRef]
- Sinha, N.; Chakrabarti, R.; Chattopadhyay, P.K. Evolutionary programming techniques for economic load dispatch. IEEE Trans. Evol. Comput. 2003, 7, 83–94. [Google Scholar] [CrossRef]
- Das, S.; Suganthan, P.N. Problem Definitions and Evaluation Criteria for CEC 2011 Competition on Testing Evolutionary Algorithms on Real World Optimization Problems; Technical Report; Jadavpur University: Kolkata, India, 2011. [Google Scholar]
- Al-Betar, M.A. Island-Based harmony search algorithm for non-convex economic load dispatch problems. J. Electr. Eng. Technol. 2021, 16, 1985–2015. [Google Scholar] [CrossRef]
- Omran, M.G.H.; Alsharhan, S.; Clerc, M. A modified intellects-masses optimizer for solving real-world optimization problems. Swarm Evol. Comput. 2018, 41, 159–166. [Google Scholar] [CrossRef]
- Omran, M.G.H.; Clerc, M. APS 9: An improved adaptive population-based simplex method for real-world engineering optimization problems. Appl. Intell. 2018, 48, 1596–1608. [Google Scholar] [CrossRef]
- Zhang, H.; Cai, Z.; Ye, X.; Wang, M.; Kuang, F.; Chen, H.; Li, C.; Li, Y. A multi-strategy enhanced salp swarm algorithm for global optimization. Eng. Comput. 2022, 38, 1177–1203. [Google Scholar] [CrossRef]
- Elsayed, S.M.; Sarker, R.A.; Essam, D.L. GA with a mew multi-parent crossover for solving IEEE-CEC2011 competition problems. In Proceedings of the 2011 IEEE Congress of Evolutionary Computation (CEC), New Orleans, LA, USA, 5–8 June 2011; pp. 1034–1040. [Google Scholar]
- Gandomi, A.H.; Yang, X.S.; Alavi, A.H. Cuckoo search algorithm: A metaheuristic approach to solve structural optimization problems. Eng. Comput. 2013, 29, 17–35. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K. A memory-based grey wolf optimizer for global optimization tasks. Appl. Soft Comput. 2020, 93, 106367. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K. A hybrid self-adaptive sine cosine algorithm with opposition based learning. Expert Syst. Appl. 2019, 119, 210–230. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-Flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl.-Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Fan, Q.S.; Huang, H.S.; Li, Y.T.; Han, Z.G.; Hu, Y.; Huang, D. Beetle antenna strategy based grey wolf optimization. Expert Syst. Appl. 2021, 165, 113882. [Google Scholar] [CrossRef]
- Nadimi-Shahraki, M.H.; Taghian, S.; Mirjalili, S. An improved grey wolf optimizer for solving engineering problems. Expert Syst. Appl. 2021, 166, 113917. [Google Scholar] [CrossRef]
- Zhang, H.L.; Li, R.; Cai, Z.N.; Gu, Z.Y.; Heidari, A.A.; Wang, M.J.; Chen, H.L.; Chen, M.Y. Advanced orthogonal moth flame optimization with Broyden-Fletcher-Goldfarb-Shanno algorithm: Framework and real-world problems. Expert Syst. Appl. 2020, 159, 113617. [Google Scholar] [CrossRef]
- Li, S.M.; Chen, H.L.; Wang, M.J.; Heidari, A.A.; Mirjalili, S. Slime mould algorithm: A new method for stochastic optimization. Future Gener. Comp. Syst. 2020, 111, 300–323. [Google Scholar] [CrossRef]
- Gao, C.; Hu, Z.B.; Tong, W.Y. Linear prediction evolution algorithm: A simplest evolutionary optimizer. Memet. Comput. 2021, 13, 319–339. [Google Scholar] [CrossRef]
- Singh, N.; Singh, S.B. A novel hybrid GWO-SCA approach for optimization problems. Eng. Sci. Technol. 2017, 20, 1586–1601. [Google Scholar] [CrossRef]
- Tian, Y.; Liu, R.C.; Zhang, X.Y.; Ma, H.P.; Tan, K.C.; Jin, Y.C. A multipopulation evolutionary algorithm for solving large-scale multimodal multiobjective optimization problems. IEEE Trans. Evol. Comput. 2021, 25, 405–418. [Google Scholar] [CrossRef]
- Ma, H.P.; Fei, M.R.; Jiang, Z.H.; Li, L.; Zhou, H.Y.; Crookes, D. A multipopulation-based multiobjective evolutionary algorithm. IEEE Trans. Cybern. 2020, 50, 689–702. [Google Scholar] [CrossRef]
- Alkayem, N.F.; Shen, L.; Asteris, P.G.; Sokol, M.; Xin, Z.Q.; Cao, M.S. A new self-adaptive quasi-oppositional stochastic fractal search for the inverse problem of structural damage assessment. Alex. Eng. J. 2022, 61, 1922–1936. [Google Scholar] [CrossRef]
- Alkayem, N.F.; Cao, M.S.; Shen, L.; Fu, R.H.; Sumarac, D. The combined social engineering particle swarm optimization for real-world engineering problems: A case study of model-based structural health monitoring. Appl. Soft Comput. 2022, 123, 108919. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameters |
|---|---|
| EO | N = 50, a1 = 2, a2 = 1, GP = 0.5 |
| MPSO | N = 50, w1 = 0.9, w2 = 0.4, c1 = 2, c2 = 2 |
| GWO | N = 50, a = 2 |
| HPSOGWO | N = 50, w = 0.5 + rand |
| SOGWO | N = 50, a = 2 |
| FSGWO | N = 50, c = 0.2, = [, ] ~ N(μ, ∑) |
| Function | Index | EO | MPSO | GWO | HPSOGWO | SOGWO | FSGWO |
|---|---|---|---|---|---|---|---|
| F1 | Mean | 4.30e + 05 | 6.80e + 06 | 5.05e + 07 | 4.01e + 07 | 3.43e + 07 | 3.29e + 03 |
| STD | 2.80e + 05 | 7.50e + 06 | 4.11e + 07 | 6.88e + 07 | 2.36e + 07 | 3.46e + 03 | |
| F2 | Mean | 6.31e − 01 | 5.91e + 07 | 1.26e + 09 | 1.77e + 09 | 3.79e + 08 | 0.00e + 00 |
| STD | 7.96e − 01 | 1.72e + 08 | 1.07e + 09 | 5.18e + 09 | 5.15e + 08 | 0.00e + 00 | |
| F3 | Mean | 8.97e + 00 | 2.36e + 03 | 3.11e + 04 | 3.26e + 04 | 2.28e + 04 | 0.00e + 00 |
| STD | 9.08e + 00 | 3.23e + 03 | 9.49e + 03 | 3.33e + 04 | 9.80e + 03 | 0.00e + 00 | |
| F4 | Mean | 3.75e + 01 | 6.79e + 01 | 2.11e + 02 | 3.21e + 02 | 1.84e + 02 | 0.00e + 00 |
| STD | 4.27e + 01 | 3.08e + 01 | 5.54e + 01 | 5.24e + 02 | 4.45e + 01 | 0.00e + 00 | |
| F5 | Mean | 2.04e + 01 | 2.08e + 01 | 2.09e + 01 | 2.08e + 01 | 2.09e + 01 | 2.00e + 01 |
| STD | 1.25e − 01 | 9.25e − 02 | 5.86e − 02 | 2.94e − 01 | 5.46e − 02 | 3.28e − 03 | |
| F6 | Mean | 7.35e + 00 | 1.29e + 01 | 1.29e + 01 | 1.48e + 01 | 1.11e + 01 | 8.33e + 00 |
| STD | 2.58e + 00 | 2.76e + 00 | 2.79e + 00 | 7.42e + 00 | 3.16e + 00 | 3.57e + 00 | |
| F7 | Mean | 5.36e − 03 | 8.34e − 03 | 1.41e + 01 | 6.93e + 00 | 6.70e + 00 | 7.86e − 03 |
| STD | 8.73e − 03 | 1.43e − 02 | 1.20e + 01 | 1.30e + 01 | 4.77e + 00 | 1.21e − 02 | |
| F8 | Mean | 4.60e + 01 | 3.64e + 01 | 7.28e + 01 | 8.03e + 01 | 6.45e + 01 | 0.00e + 00 |
| STD | 1.04e + 01 | 1.15e + 01 | 1.62e + 01 | 3.57e + 01 | 1.69e + 01 | 0.00e + 00 | |
| F9 | Mean | 8.84e + 01 | 6.99e + 01 | 9.19e + 01 | 9.65e + 01 | 8.34e + 01 | 3.71e + 01 |
| STD | 2.74e + 01 | 1.83e + 01 | 2.37e + 01 | 6.92e + 01 | 1.57e + 01 | 8.27e + 00 | |
| F10 | Mean | 1.56e + 03 | 9.51e + 02 | 2.19e + 03 | 2.64e + 03 | 1.90e + 03 | 1.35e + 01 |
| STD | 5.46e + 02 | 4.86e + 02 | 6.26e + 02 | 1.25e + 03 | 5.31e + 02 | 3.73e + 00 | |
| F11 | Mean | 3.26e + 03 | 2.93e + 03 | 2.73e + 03 | 3.64e + 03 | 2.67e + 03 | 1.98e + 03 |
| STD | 7.43e + 02 | 6.43e + 02 | 6.29e + 02 | 1.67e + 03 | 7.22e + 02 | 3.09e + 02 | |
| F12 | Mean | 9.18e − 01 | 4.82e − 01 | 1.64e + 00 | 1.40e + 00 | 2.23e + 00 | 1.84e − 01 |
| STD | 3.90e − 01 | 2.51e − 01 | 1.08e + 00 | 1.17e + 00 | 7.53e − 01 | 3.67e − 02 | |
| F13 | Mean | 2.19e − 01 | 4.90e − 01 | 3.89e − 01 | 4.47e − 01 | 3.33e − 01 | 2.78e − 01 |
| STD | 6.95e − 02 | 1.10e − 01 | 1.87e − 01 | 2.79e − 01 | 6.63e − 02 | 6.68e − 02 | |
| F14 | Mean | 2.55e − 01 | 4.47e − 01 | 2.26e + 00 | 3.31e + 00 | 9.11e − 01 | 2.10e − 01 |
| STD | 1.10e − 01 | 1.96e − 01 | 4.25e + 00 | 8.81e + 00 | 2.24e + 00 | 4.68e − 02 | |
| F15 | Mean | 4.48e + 00 | 7.28e + 00 | 5.38e + 01 | 1.55e + 04 | 2.88e + 01 | 4.89e + 00 |
| STD | 1.27e + 00 | 3.12e + 00 | 1.07e + 02 | 9.43e + 04 | 5.52e + 01 | 1.31e + 00 | |
| F16 | Mean | 1.11e + 01 | 1.21e + 01 | 1.10e + 01 | 1.17e + 01 | 1.08e + 01 | 1.03e + 01 |
| STD | 8.75e − 01 | 5.60e − 01 | 7.16e − 01 | 1.07e + 00 | 7.09e − 01 | 3.73e − 01 | |
| F17 | Mean | 1.87e + 05 | 2.24e + 04 | 1.43e + 06 | 9.24e + 05 | 8.78e + 05 | 2.32e + 03 |
| STD | 1.27e + 05 | 2.40e + 04 | 1.81e + 06 | 9.99e + 05 | 8.59e + 05 | 4.37e + 03 | |
| F18 | Mean | 2.85e + 03 | 5.40e + 02 | 7.14e + 06 | 1.79e + 06 | 3.95e + 06 | 7.26e + 01 |
| STD | 4.01e + 03 | 5.91e + 02 | 1.95e + 07 | 7.19e + 06 | 1.45e + 07 | 3.08e + 01 | |
| F19 | Mean | 9.13e + 00 | 8.14e + 00 | 3.87e + 01 | 4.43e + 01 | 2.06e + 01 | 3.95e + 00 |
| STD | 1.16e + 01 | 8.81e + 00 | 2.53e + 01 | 5.07e + 01 | 1.39e + 01 | 1.13e + 00 | |
| F20 | Mean | 3.55e + 02 | 2.77e + 02 | 1.52e + 04 | 1.45e + 04 | 1.05e + 04 | 5.73e + 01 |
| STD | 1.19e + 02 | 1.97e + 02 | 1.06e + 04 | 2.03e + 04 | 5.75e + 03 | 3.14e + 01 | |
| F21 | Mean | 8.76e + 04 | 2.10e + 04 | 7.68e + 05 | 8.95e + 05 | 3.03e + 05 | 4.10e + 02 |
| STD | 8.12e + 04 | 4.71e + 04 | 1.46e + 06 | 1.74e + 06 | 3.25e + 05 | 2.49e + 02 | |
| F22 | Mean | 3.31e + 02 | 4.15e + 02 | 3.39e + 02 | 4.93e + 02 | 2.97e + 02 | 1.44e + 02 |
| STD | 1.53e + 02 | 1.76e + 02 | 1.47e + 02 | 2.60e + 02 | 1.12e + 02 | 7.41e + 01 | |
| F23 | Mean | 3.15e + 02 | 3.15e + 02 | 3.32e + 02 | 3.41e + 02 | 3.28e + 02 | 3.15e + 02 |
| STD | 1.50e − 12 | 1.71e − 12 | 8.54e + 00 | 4.23e + 01 | 7.58e + 00 | 5.05e − 13 | |
| F24 | Mean | 2.00e + 02 | 2.00e + 02 | 2.00e + 02 | 2.38e + 02 | 2.00e + 02 | 2.31e + 02 |
| STD | 6.37e − 04 | 1.58e − 04 | 8.09e − 04 | 5.42e + 01 | 7.42e − 04 | 5.73e + 00 | |
| F25 | Mean | 2.01e + 02 | 2.00e + 02 | 2.10e + 02 | 2.11e + 02 | 2.10e + 02 | 2.08e + 02 |
| STD | 2.55e + 00 | 0.00e + 00 | 4.03e + 00 | 7.30e + 00 | 3.62e + 00 | 3.42e + 00 | |
| F26 | Mean | 1.30e + 02 | 1.25e + 02 | 1.30e + 02 | 1.44e + 02 | 1.34e + 02 | 1.06e + 02 |
| STD | 4.59e + 01 | 4.22e + 01 | 4.58e + 01 | 4.96e + 01 | 4.74e + 01 | 2.37e + 01 | |
| F27 | Mean | 5.09e + 02 | 6.21e + 02 | 6.24e + 02 | 7.63e + 02 | 6.01e + 02 | 4.51e + 02 |
| STD | 6.92e + 01 | 1.74e + 02 | 1.20e + 02 | 2.23e + 02 | 8.60e + 01 | 7.28e + 01 | |
| F28 | Mean | 9.71e + 02 | 1.14e + 03 | 1.05e + 03 | 1.38e + 03 | 9.22e + 02 | 7.07e + 02 |
| STD | 1.43e + 02 | 2.69e + 02 | 2.46e + 02 | 6.95e + 02 | 1.08e + 02 | 1.05e + 02 | |
| F29 | Mean | 1.77e + 06 | 1.73e + 05 | 4.24e + 05 | 2.82e + 06 | 2.00e + 05 | 5.29e + 02 |
| STD | 3.62e + 06 | 1.22e + 06 | 1.94e + 06 | 5.32e + 06 | 1.25e + 06 | 1.62e + 02 | |
| F30 | Mean | 3.15e + 03 | 3.00e + 03 | 3.99e + 04 | 2.91e + 04 | 2.19e + 04 | 8.70e + 02 |
| STD | 9.36e + 02 | 1.13e + 03 | 2.88e + 04 | 4.56e + 04 | 1.27e + 04 | 2.32e + 02 |
| FSGWO v.s. | EO | MPSO | GWO | HPSOGWO | SOGWO |
|---|---|---|---|---|---|
| p value | 8.3606e − 05 | 9.4199e − 06 | 2.7389e − 06 | 9.1269e − 07 | 3.3270e − 06 |
| FSGWO v.s. | EO | MPSO | GWO | HPSOGWO | SOGWO |
|---|---|---|---|---|---|
| F1 | 0.99233 | 0.99951 | 0.99993 | 0.99991 | 0.9999 |
| F2 | 1 | 1 | 1 | 1 | 1 |
| F3 | 1 | 1 | 1 | 1 | 1 |
| F4 | 1 | 1 | 1 | 1 | 1 |
| F5 | 0.01935 | 0.03823 | 0.04495 | 0.03886 | 0.04480 |
| F6 | −0.13328 | 0.35274 | 0.35262 | 0.43869 | 0.25254 |
| F7 | −0.46719 | 0.05726 | 0.99944 | 0.99886 | 0.99882 |
| F8 | 1 | 1 | 1 | 1 | 1 |
| F9 | 0.57994 | 0.46875 | 0.59616 | 0.61525 | 0.55491 |
| F10 | 0.99135 | 0.98582 | 0.99384 | 0.99488 | 0.99289 |
| F11 | 0.39112 | 0.32372 | 0.27480 | 0.45486 | 0.25834 |
| F12 | 0.79911 | 0.61698 | 0.88735 | 0.86818 | 0.91712 |
| F13 | −0.26746 | 0.43291 | 0.28450 | 0.37861 | 0.16395 |
| F14 | 0.17936 | 0.53175 | 0.90744 | 0.93668 | 0.77010 |
| F15 | −0.09313 | 0.32768 | 0.90905 | 0.99968 | 0.83011 |
| F16 | 0.07097 | 0.14846 | 0.06430 | 0.12162 | 0.04669 |
| F17 | 0.98757 | 0.89615 | 0.99838 | 0.99748 | 0.99735 |
| F18 | 0.97451 | 0.86556 | 0.99998 | 0.99995 | 0.99998 |
| F19 | 0.56795 | 0.51507 | 0.89798 | 0.91101 | 0.80831 |
| F20 | 0.83864 | 0.79354 | 0.99622 | 0.99604 | 0.99456 |
| F21 | 0.99531 | 0.98043 | 0.99946 | 0.99954 | 0.99864 |
| F22 | 0.56651 | 0.65413 | 0.57670 | 0.70879 | 0.51583 |
| F23 | 0 | 0 | 0.05049 | 0.07450 | 0.03775 |
| F24 | −0.15584 | −0.15584 | −0.15584 | 0.02768 | −0.15584 |
| F25 | −0.03369 | −0.03851 | 0.01218 | 0.01622 | 0.00905 |
| F26 | 0.18118 | 0.14955 | 0.18180 | 0.26123 | 0.20560 |
| F27 | 0.11363 | 0.27257 | 0.27601 | 0.40817 | 0.24936 |
| F28 | 0.27247 | 0.38170 | 0.32701 | 0.48875 | 0.23333 |
| F29 | 0.99970 | 0.99695 | 0.99875 | 0.99981 | 0.99735 |
| F30 | 0.72346 | 0.70966 | 0.97818 | 0.97013 | 0.96032 |
| Average | 0.4698 | 0.5435 | 0.6484 | 0.6902 | 0.6227 |
| Function | Index | EO | MPSO | GWO | HPSOGWO | SOGWO | FSGWO |
|---|---|---|---|---|---|---|---|
| F1 | Mean | 1.32e + 06 | 1.80e + 07 | 8.42e + 07 | 4.34e + 07 | 6.77e + 07 | 2.66e + 04 |
| STD | 5.23e + 05 | 1.58e + 07 | 5.08e + 07 | 5.51e + 07 | 3.84e + 07 | 1.75e + 04 | |
| F2 | Mean | 7.35e + 03 | 1.72e + 09 | 7.67e + 09 | 5.63e + 09 | 4.14e + 09 | 4.16e − 05 |
| STD | 8.57e + 03 | 1.68e + 09 | 3.29e + 09 | 1.12e + 10 | 3.21e + 09 | 1.56e − 04 | |
| F3 | Mean | 8.80e + 02 | 6.43e + 03 | 5.82e + 04 | 4.92e + 04 | 4.72e + 04 | 1.14e − 02 |
| STD | 6.76e + 02 | 5.41e + 03 | 1.08e + 04 | 3.19e + 04 | 1.06e + 04 | 3.64e − 02 | |
| F4 | Mean | 8.15e + 01 | 2.11e + 02 | 7.64e + 02 | 5.68e + 02 | 4.50e + 02 | 8.76e + 00 |
| STD | 3.63e + 01 | 2.67e + 02 | 3.33e + 02 | 8.90e + 02 | 2.02e + 02 | 1.80e + 01 | |
| F5 | Mean | 2.05e + 01 | 2.11e + 01 | 2.11e + 01 | 2.10e + 01 | 2.11e + 01 | 2.00e + 01 |
| STD | 1.19e − 01 | 5.14e − 02 | 4.44e − 02 | 2.90e − 01 | 4.43e − 02 | 8.68e − 03 | |
| F6 | Mean | 2.06e + 01 | 3.00e + 01 | 2.98e + 01 | 2.81e + 01 | 2.62e + 01 | 2.37e + 01 |
| STD | 3.65e + 00 | 4.68e + 00 | 3.98e + 00 | 1.04e + 01 | 3.62e + 00 | 4.21e + 00 | |
| F7 | Mean | 7.04e − 03 | 8.68e − 03 | 7.85e + 01 | 5.64e + 01 | 4.17e + 01 | 6.42e − 03 |
| STD | 1.01e − 02 | 1.13e − 02 | 3.44e + 01 | 1.37e + 02 | 3.30e + 01 | 7.64e − 03 | |
| F8 | Mean | 1.28e + 02 | 6.97e + 01 | 1.88e + 02 | 1.75e + 02 | 1.69e + 02 | 0.00e + 00 |
| STD | 2.51e + 01 | 1.66e + 01 | 3.04e + 01 | 7.77e + 01 | 2.30e + 01 | 0.00e + 00 | |
| F9 | Mean | 1.63e + 02 | 1.50e + 02 | 2.02e + 02 | 2.62e + 02 | 1.82e + 02 | 1.03e + 02 |
| STD | 3.64e + 01 | 3.13e + 01 | 3.13e + 01 | 1.54e + 02 | 4.81e + 01 | 1.75e + 01 | |
| F10 | Mean | 3.67e + 03 | 2.13e + 03 | 5.70e + 03 | 6.37e + 03 | 5.02e + 03 | 2.74e + 01 |
| STD | 9.87e + 02 | 6.28e + 02 | 8.02e + 02 | 2.35e + 03 | 7.68e + 02 | 6.31e + 00 | |
| F11 | Mean | 6.66e + 03 | 5.88e + 03 | 5.70e + 03 | 6.46e + 03 | 5.27e + 03 | 4.33e + 03 |
| STD | 8.95e + 02 | 9.05e + 02 | 1.37e + 03 | 2.68e + 03 | 1.32e + 03 | 4.57e + 02 | |
| F12 | Mean | 1.49e + 00 | 4.53e − 01 | 1.92e + 00 | 1.88e + 00 | 2.55e + 00 | 1.86e − 01 |
| STD | 3.89e − 01 | 1.98e − 01 | 1.66e + 00 | 1.56e + 00 | 1.43e + 00 | 3.26e − 02 | |
| F13 | Mean | 4.42e − 01 | 5.85e − 01 | 7.46e − 01 | 8.03e − 01 | 5.92e − 01 | 4.69e − 01 |
| STD | 8.05e − 02 | 2.92e − 01 | 5.09e − 01 | 8.17e − 01 | 7.78e − 02 | 8.04e − 02 | |
| F14 | Mean | 2.98e − 01 | 4.13e − 01 | 1.48e + 01 | 8.34e + 00 | 4.40e + 00 | 2.88e − 01 |
| STD | 1.16e − 01 | 1.69e − 01 | 1.33e + 01 | 2.49e + 01 | 7.24e + 00 | 7.33e − 02 | |
| F15 | Mean | 1.15e + 01 | 2.57e + 01 | 1.65e + 03 | 4.39e + 03 | 5.33e + 02 | 2.44e + 01 |
| STD | 3.81e + 00 | 8.01e + 00 | 2.36e + 03 | 2.31e + 04 | 9.96e + 02 | 6.05e + 00 | |
| F16 | Mean | 2.02e + 01 | 2.16e + 01 | 2.00e + 01 | 2.09e + 01 | 1.98e + 01 | 1.88e + 01 |
| STD | 9.71e − 01 | 5.97e − 01 | 8.13e − 01 | 1.11e + 00 | 1.06e + 00 | 5.18e − 01 | |
| F17 | Mean | 2.58e + 05 | 3.75e + 05 | 4.55e + 06 | 1.97e + 06 | 3.00e + 06 | 4.68e + 04 |
| STD | 1.40e + 05 | 8.94e + 05 | 5.24e + 06 | 2.10e + 06 | 1.83e + 06 | 4.13e + 04 | |
| F18 | Mean | 2.53e + 03 | 1.72e + 03 | 6.52e + 07 | 8.26e + 07 | 2.77e + 07 | 4.84e + 02 |
| STD | 1.32e + 03 | 2.13e + 03 | 1.27e + 08 | 3.36e + 08 | 6.07e + 07 | 5.70e + 02 | |
| F19 | Mean | 1.73e + 01 | 2.56e + 01 | 8.25e + 01 | 7.04e + 01 | 7.35e + 01 | 2.57e + 01 |
| STD | 9.38e + 00 | 1.47e + 01 | 2.84e + 01 | 4.70e + 01 | 2.36e + 01 | 2.05e + 01 | |
| F20 | Mean | 5.69e + 02 | 5.51e + 02 | 1.51e + 04 | 1.86e + 04 | 1.01e + 04 | 2.76e + 02 |
| STD | 1.43e + 02 | 2.18e + 02 | 7.77e + 03 | 3.12e + 04 | 6.06e + 03 | 3.02e + 02 | |
| F21 | Mean | 1.76e + 05 | 1.79e + 05 | 2.62e + 06 | 1.77e + 06 | 2.18e + 06 | 1.96e + 04 |
| STD | 1.10e + 05 | 2.00e + 05 | 2.76e + 06 | 3.37e + 06 | 1.85e + 06 | 3.94e + 04 | |
| F22 | Mean | 8.33e + 02 | 1.11e + 03 | 8.07e + 02 | 9.67e + 02 | 7.23e + 02 | 4.59e + 02 |
| STD | 3.12e + 02 | 3.19e + 02 | 2.80e + 02 | 5.13e + 02 | 3.05e + 02 | 1.68e + 02 | |
| F23 | Mean | 3.45e + 02 | 3.45e + 02 | 4.37e + 02 | 3.94e + 02 | 4.15e + 02 | 3.44e + 02 |
| STD | 1.01e − 03 | 1.09e − 12 | 4.22e + 01 | 6.97e + 01 | 3.00e + 01 | 8.44e − 13 | |
| F24 | Mean | 2.01e + 02 | 2.20e + 02 | 2.01e + 02 | 2.63e + 02 | 2.00e + 02 | 2.86e + 02 |
| STD | 5.47e − 04 | 3.13e + 01 | 6.47e − 04 | 8.22e + 01 | 4.88e − 04 | 5.50e + 00 | |
| F25 | Mean | 2.00e + 02 | 2.01e + 02 | 2.27e + 02 | 2.27e + 02 | 2.23e + 02 | 2.28e + 02 |
| STD | 2.90e − 13 | 4.06e + 00 | 9.21e + 00 | 1.61e + 01 | 6.45e + 00 | 7.02e + 00 | |
| F26 | Mean | 1.80e + 02 | 1.91e + 02 | 1.88e + 02 | 1.94e + 02 | 1.80e + 02 | 1.04e + 02 |
| STD | 4.00e + 01 | 2.94e + 01 | 4.43e + 01 | 8.37e + 01 | 4.98e + 01 | 1.95e + 01 | |
| F27 | Mean | 8.55e + 02 | 1.20e + 03 | 1.06e + 03 | 1.17e + 03 | 9.35e + 02 | 9.67e + 02 |
| STD | 9.36e + 01 | 1.51e + 02 | 1.11e + 02 | 3.21e + 02 | 1.10e + 02 | 8.51e + 01 | |
| F28 | Mean | 1.57e + 03 | 2.32e + 03 | 2.18e + 03 | 2.51e + 03 | 1.88e + 03 | 1.53e + 03 |
| STD | 3.56e + 02 | 7.20e + 02 | 5.22e + 02 | 1.71e + 03 | 4.86e + 02 | 2.05e + 02 | |
| F29 | Mean | 1.71e + 07 | 2.25e + 06 | 4.98e + 06 | 2.12e + 07 | 1.07e + 06 | 9.36e + 02 |
| STD | 2.08e + 07 | 1.17e + 07 | 7.89e + 06 | 3.84e + 07 | 2.45e + 06 | 1.17e + 02 | |
| F30 | Mean | 1.12e + 04 | 2.25e + 04 | 1.44e + 05 | 6.35e + 04 | 1.01e + 05 | 1.09e + 04 |
| STD | 1.89e + 03 | 1.44e + 04 | 9.16e + 04 | 8.40e + 04 | 4.86e + 04 | 1.06e + 03 |
| FSGWO v.s. | EO | MPSO | GWO | HPSOGWO | SOGWO |
|---|---|---|---|---|---|
| p value | 6.2062e−04 | 1.3587e − 05 | 4.0348e − 06 | 2.7389e − 06 | 1.4875e − 05 |
| FSGWO v.s. | EO | MPSO | GWO | HPSOGWO | SOGWO |
|---|---|---|---|---|---|
| F1 | 0.97980 | 0.99851 | 0.99968 | 0.99938 | 0.99960 |
| F2 | 0.99999 | 0.99999 | 0.99999 | 0.99999 | 0.99999 |
| F3 | 0.99998 | 0.99999 | 0.99999 | 0.99999 | 0.99999 |
| F4 | 0.89254 | 0.95845 | 0.98853 | 0.98457 | 0.98052 |
| F5 | 0.02433 | 0.04952 | 0.05230 | 0.04873 | 0.05284 |
| F6 | −0.15302 | 0.21058 | 0.20577 | 0.15643 | 0.09618 |
| F7 | 0.08817 | 0.25980 | 0.99991 | 0.99988 | 0.99984 |
| F8 | 1 | 1 | 1 | 1 | 1 |
| F9 | 0.36540 | 0.31038 | 0.48843 | 0.60660 | 0.43276 |
| F10 | 0.99251 | 0.98709 | 0.99518 | 0.99569 | 0.99453 |
| F11 | 0.34982 | 0.26415 | 0.24015 | 0.32972 | 0.17841 |
| F12 | 0.87485 | 0.58948 | 0.90300 | 0.90099 | 0.92698 |
| F13 | −0.06079 | 0.19856 | 0.37149 | 0.41602 | 0.20706 |
| F14 | 0.03271 | 0.30191 | 0.98054 | 0.96542 | 0.93453 |
| F15 | −1.12418 | 0.05005 | 0.98515 | 0.99442 | 0.95411 |
| F16 | 0.06779 | 0.12730 | 0.05831 | 0.09673 | 0.04623 |
| F17 | 0.81835 | 0.87511 | 0.98971 | 0.97621 | 0.98438 |
| F18 | 0.80887 | 0.71945 | 0.99999 | 0.99999 | 0.99998 |
| F19 | −0.48750 | −0.00178 | 0.68877 | 0.63547 | 0.65086 |
| F20 | 0.51465 | 0.49930 | 0.98170 | 0.98517 | 0.97274 |
| F21 | 0.88885 | 0.89059 | 0.99250 | 0.98892 | 0.99102 |
| F22 | 0.44841 | 0.58529 | 0.43070 | 0.525 | 0.36459 |
| F23 | 0 | 0 | 0.21257 | 0.12794 | 0.17198 |
| F24 | −0.42928 | −0.30017 | −0.42928 | −0.08550 | −0.42928 |
| F25 | −0.14177 | −0.13853 | −0.00643 | −0.00486 | −0.02340 |
| F26 | 0.42134 | 0.45188 | 0.44399 | 0.46109 | 0.41925 |
| F27 | −0.13037 | 0.19254 | 0.08732 | 0.17541 | −0.03359 |
| F28 | 0.02665 | 0.34062 | 0.29742 | 0.38918 | 0.18338 |
| F29 | 0.99994 | 0.99958 | 0.99981 | 0.99995 | 0.99912 |
| F30 | 0.02232 | 0.51392 | 0.92418 | 0.82759 | 0.89163 |
| Average | 0.3363 | 0.4645 | 0.6294 | 0.6499 | 0.5982 |
| Function | Index | FSGWO | FSGWO1 | Function | Index | FSGWO | FSGWO1 |
|---|---|---|---|---|---|---|---|
| F1 | Mean | 3.29e + 03 | 5.74e + 04 | F16 | Mean | 1.03e + 01 | 1.07e + 01 |
| STD | 3.46e + 03 | 1.06e + 05 | STD | 3.73e − 01 | 3.98e − 01 | ||
| F2 | Mean | 0.00e + 00 | 0.00e + 00 | F17 | Mean | 2.32e + 03 | 1.97e + 03 |
| STD | 0.00e + 00 | 0.00e + 00 | STD | 4.37e + 03 | 1.10e + 03 | ||
| F3 | Mean | 0.00e + 00 | 0.00e + 00 | F18 | Mean | 7.26e + 01 | 8.39e + 01 |
| STD | 0.00e + 00 | 0.00e + 00 | STD | 3.08e + 01 | 2.74e + 01 | ||
| F4 | Mean | 0.00e + 00 | 2.86e + 01 | F19 | Mean | 3.95e + 00 | 8.36e + 00 |
| STD | 0.00e + 00 | 3.58e + 01 | STD | 1.13e + 00 | 8.44e + 00 | ||
| F5 | Mean | 2.00e + 01 | 2.05e + 01 | F20 | Mean | 5.73e + 01 | 4.86e + 01 |
| STD | 3.28e − 03 | 5.22e − 02 | STD | 3.14e + 01 | 2.26e + 01 | ||
| F6 | Mean | 8.33e + 00 | 4.23e + 00 | F21 | Mean | 4.10e + 02 | 6.00e + 02 |
| STD | 3.57e + 00 | 1.38e + 00 | STD | 2.49e + 02 | 5.80e + 02 | ||
| F7 | Mean | 7.86e − 03 | 1.35e − 02 | F22 | Mean | 1.44e + 02 | 1.78e + 02 |
| STD | 1.21e − 02 | 1.37e − 02 | STD | 7.41e + 01 | 6.66e + 01 | ||
| F8 | Mean | 0.00e + 00 | 1.48e + 01 | F23 | Mean | 3.15e + 02 | 3.15e + 02 |
| STD | 0.00e + 00 | 2.83e + 00 | STD | 5.05e − 13 | 5.94e − 13 | ||
| F9 | Mean | 3.71e + 01 | 4.94e + 01 | F24 | Mean | 2.31e + 02 | 2.29e + 02 |
| STD | 8.27e + 00 | 7.51e + 00 | STD | 5.73e + 00 | 5.55e + 00 | ||
| F10 | Mean | 1.35e + 01 | 3.50e + 02 | F25 | Mean | 2.08e + 02 | 2.09e + 02 |
| STD | 3.73e + 00 | 1.01e + 02 | STD | 3.42e + 00 | 2.83e + 00 | ||
| F11 | Mean | 1.98e + 03 | 3.00e + 03 | F26 | Mean | 1.06e + 02 | 1.24e + 02 |
| STD | 3.09e + 02 | 2.77e + 02 | STD | 2.37e + 01 | 4.27e + 01 | ||
| F12 | Mean | 1.84e − 01 | 5.66e − 01 | F27 | Mean | 4.51e + 02 | 4.28e + 02 |
| STD | 3.67e − 02 | 8.91e − 02 | STD | 7.28e + 01 | 5.05e + 01 | ||
| F13 | Mean | 2.78e − 01 | 2.64e − 01 | F28 | Mean | 7.07e + 02 | 8.76e + 02 |
| STD | 6.68e − 02 | 5.31e − 02 | STD | 1.05e + 02 | 4.81e + 01 | ||
| F14 | Mean | 2.10e − 01 | 2.29e − 01 | F29 | Mean | 5.29e + 02 | 7.69e + 02 |
| STD | 4.68e − 02 | 4.60e − 02 | STD | 1.62e + 02 | 1.39e + 02 | ||
| F15 | Mean | 4.89e + 00 | 7.18e + 00 | F30 | Mean | 8.70e + 02 | 1.99e + 03 |
| STD | 1.31e + 00 | 1.49e + 00 | STD | 2.32e + 02 | 6.60e + 02 |
| FSGWO v.s. | FSGWO1 |
|---|---|
| p value | 2.7610e − 03 |
| Function | Index | FSGWO | FSGWO2 | Function | Index | FSGWO | FSGWO2 |
|---|---|---|---|---|---|---|---|
| F1 | Mean | 3.29e + 03 | 1.09e + 04 | F16 | Mean | 1.03e + 01 | 1.02e + 01 |
| STD | 3.46e + 03 | 7.88e + 03 | STD | 3.73e − 01 | 3.38e − 01 | ||
| F2 | Mean | 0.00e + 00 | 0.00e + 00 | F17 | Mean | 2.32e + 03 | 5.21e + 03 |
| STD | 0.00e + 00 | 0.00e + 00 | STD | 4.37e + 03 | 8.12e + 03 | ||
| F3 | Mean | 0.00e + 00 | 0.00e + 00 | F18 | Mean | 7.26e + 01 | 7.55e + 01 |
| STD | 0.00e + 00 | 0.00e + 00 | STD | 3.08e + 01 | 2.73e + 01 | ||
| F4 | Mean | 0.00e + 00 | 1.37e + 00 | F19 | Mean | 3.95e + 00 | 8.66e + 00 |
| STD | 0.00e + 00 | 9.10e + 00 | STD | 1.13e + 00 | 1.18e + 01 | ||
| F5 | Mean | 2.00e + 01 | 2.02e + 01 | F20 | Mean | 5.73e + 01 | 4.03e + 01 |
| STD | 3.28e−03 | 3.82e − 02 | STD | 3.14e + 01 | 2.64e + 01 | ||
| F6 | Mean | 8.33e + 00 | 3.28e + 00 | F21 | Mean | 4.10e + 02 | 5.49e + 02 |
| STD | 3.57e + 00 | 2.56e + 00 | STD | 2.49e + 02 | 7.45e + 02 | ||
| F7 | Mean | 7.86e − 03 | 1.08e − 02 | F22 | Mean | 1.44e + 02 | 1.67e + 02 |
| STD | 1.21e − 02 | 1.41e − 02 | STD | 7.41e + 01 | 6.17e + 01 | ||
| F8 | Mean | 0.00e + 00 | 7.08e − 02 | F23 | Mean | 3.15e + 02 | 3.15e + 02 |
| STD | 0.00e + 00 | 5.05e − 01 | STD | 5.05e − 13 | 5.35e − 13 | ||
| F9 | Mean | 3.71e + 01 | 4.48e + 01 | F24 | Mean | 2.31e + 02 | 2.31e + 02 |
| STD | 8.27e + 00 | 7.67e + 00 | STD | 5.73e + 00 | 6.83e + 00 | ||
| F10 | Mean | 1.35e + 01 | 9.25e + 01 | F25 | Mean | 2.08e + 02 | 2.07e + 02 |
| STD | 3.73e + 00 | 3.84e + 01 | STD | 3.42e + 00 | 2.78e + 00 | ||
| F11 | Mean | 1.98e + 03 | 2.63e + 03 | F26 | Mean | 1.06e + 02 | 1.20e + 02 |
| STD | 3.09e + 02 | 2.28e + 02 | STD | 2.37e + 01 | 4.00e + 01 | ||
| F12 | Mean | 1.84e − 01 | 3.75e − 01 | F27 | Mean | 4.51e + 02 | 4.25e + 02 |
| STD | 3.67e − 02 | 5.87e − 02 | STD | 7.28e + 01 | 4.79e + 01 | ||
| F13 | Mean | 2.78e − 01 | 2.46e − 01 | F28 | Mean | 7.07e + 02 | 8.74e + 02 |
| STD | 6.68e − 02 | 5.89e − 02 | STD | 1.05e + 02 | 5.15e + 01 | ||
| F14 | Mean | 2.10e − 01 | 2.13e − 01 | F29 | Mean | 5.29e + 02 | 6.58e + 02 |
| STD | 4.68e − 02 | 5.06e − 02 | STD | 1.62e + 02 | 1.66e + 02 | ||
| F15 | Mean | 4.89e + 00 | 6.04e + 00 | F30 | Mean | 8.70e + 02 | 1.69e + 03 |
| STD | 1.31e + 00 | 1.26e + 00 | STD | 2.32e + 02 | 5.83e + 02 |
| FSGWO v.s. | FSGWO1 |
|---|---|
| p value | 2.9719e − 03 |
| No. | Algorithm | Best | Mean | Median | Worst | STD |
|---|---|---|---|---|---|---|
| 1 | FSGWO | 1.2260e + 05 | 1.2514e + 05 | 1.2519e + 05 | 1.2758e + 05 | 9.8099e + 02 |
| 2 | GWO | 1.2602e + 05 | 1.2762e + 05 | 1.2751e + 05 | 1.3002e + 05 | 9.4627e + 02 |
| 3 | HPSOGWO | 1.2474e + 05 | 1.2614e + 05 | 1.2606e + 05 | 1.2795e + 05 | 1.0180e + 03 |
| 4 | SOGWO | 1.2626e + 05 | 1.2804e + 05 | 1.2799e + 05 | 1.3113e + 05 | 1.3027e + 03 |
| 5 | EO | 1.2591e + 05 | 1.2725e + 05 | 1.2688e + 05 | 1.2930e + 05 | 1.0265e + 03 |
| 6 | MPSO | 1.2617e + 05 | 1.2741e + 05 | 1.2737e + 05 | 1.2920e + 05 | 7.4119e + 02 |
| 7 | iHS [52] | 1.2980e + 05 | 1.3375e + 05 | 1.3392e + 05 | 1.3701e + 05 | 1.6258e + 03 |
| 8 | IMO [53] | 1.3073e + 05 | 1.3465e + 05 | 1.3428e + 05 | 1.3846e + 05 | 2.2328e + 03 |
| 9 | MIMO [53] | 1.2960e + 05 | 1.3306e + 05 | 1.3297e + 05 | 1.3698e + 05 | 2.1161e + 03 |
| 10 | APS 9 [54] | 1.2390e + 05 | 1.2553e + 05 | 1.2544e + 05 | 1.2715e + 05 | 8.0868e + 02 |
| 11 | ESSA [55] | 1.2885e + 05 | 1.3061e + 05 | — | 1.3355e + 05 | 1.0434e + 03 |
| 12 | GA-MPC [56] | 1.2921e + 05 | 1.3323e + 05 | 1.3319e + 05 | 1.3606e + 05 | 1.8788e + 03 |
| No. | Algorithm | Best | Mean | Median | Worst | STD |
|---|---|---|---|---|---|---|
| 1 | FSGWO | 1.7551e + 06 | 1.8119e + 06 | 1.8107e + 06 | 1.8598e + 06 | 2.3481e + 04 |
| 2 | GWO | 1.8935e + 06 | 1.9313e + 06 | 1.9317e + 06 | 1.9582e + 06 | 1.6986e + 04 |
| 3 | HPSOGWO | 1.8611e + 06 | 1.9210e + 06 | 1.9234e + 06 | 1.9728e + 06 | 3.0071e + 04 |
| 4 | SOGWO | 1.8828e + 06 | 1.9303e + 06 | 1.9284e + 06 | 1.9660e + 06 | 2.0406e + 04 |
| 5 | EO | 1.8645e + 06 | 1.9187e + 06 | 1.9190e + 06 | 1.9639e + 06 | 2.3944e + 04 |
| 6 | MPSO | 1.8756e + 06 | 1.9173e + 06 | 1.9133e + 06 | 1.9746e + 06 | 2.4482e + 04 |
| 7 | iHS [52] | 1.9142e + 06 | 2.0538e + 06 | 1.9942e + 06 | 2.5494e + 06 | 1.5139e + 05 |
| 8 | IMO [53] | 1.9061e + 06 | 1.9338e + 06 | 1.9322e + 06 | 1.9639e + 06 | 1.6741e + 04 |
| 9 | MIMO [53] | 1.8957e + 06 | 1.9181e + 06 | 1.9184e + 06 | 1.9373e + 06 | 1.1350e + 04 |
| 10 | APS 9 [54] | 1.8540e + 06 | 2.0666e + 06 | 1.9268e + 06 | 2.9513e + 06 | 3.1309e + 05 |
| 11 | ESSA [55] | 1.9087e + 06 | 1.9350e + 06 | — | 1.9541e + 06 | 1.3123e + 04 |
| 12 | GA-MPC [56] | 1.9203e + 06 | 1.9533e + 06 | 1.9567e + 06 | 1.9707e + 06 | 1.4084e + 04 |
| Algorithm | x1 | x2 | f (x1,x2) |
|---|---|---|---|
| FSGWO | 0.7886751 | 0.4082485 | 263.8958 |
| m-GWO [58] | 0.7885845 | 0.4085071 | 263.8961 |
| m-SCA [59] | 0.81915 | 0.36956 | 263.8972 |
| MFO [60] | 0.78824477 | 0.40946691 | 263.8960 |
| CS [57] | 0.78867 | 0.40902 | 263.9716 |
| Algorithm | x1 | x2 | x3 | x4 | f(x1,x2,x3,x4) |
|---|---|---|---|---|---|
| FSGWO | 0.7782 | 0.3846 | 40.3196 | 200.0000 | 5885.3328 |
| BGWO [61] | 0.7783 | 0.3847 | 40.3197 | 200.0000 | 5886.4955 |
| I-GWO [62] | 0.779031 | 0.385501 | 40.36313 | 199.4017 | 5888.3400 |
| BFGSOLMFO [63] | 0.778675 | 0.385392 | 40.342876 | 199.754805 | 5889.7080 |
| SMA [64] | 0.7931 | 0.3932 | 40.6711 | 196.2178 | 5994.1857 |
| Algorithm | x1 | x2 | x3 | x4 | f(x1,x2,x3,x4) |
|---|---|---|---|---|---|
| FSGWO | 19 | 43 | 16 | 49 | 2.7009e−12 |
| m-SCA [59] | 43 | 16 | 19 | 49 | 2.7009e−12 |
| CS [57] | 43 | 16 | 19 | 49 | 2.7009e−12 |
| LPE [65] | 19 | 49 | 16 | 43 | 2.7009e−12 |
| GWOSCA [66] | 26 | 51 | 15 | 53 | 2.3078e−11 |
| Algorithm | x1 | x2 | x3 | x4 | x5 | f(x1,x2,x3,x4,x5) |
|---|---|---|---|---|---|---|
| FSGWO | 6.0160 | 5.3092 | 4.4943 | 3.5015 | 2.1527 | 1.33996 |
| CS [57] | 6.0089 | 5.3049 | 4.5023 | 3.5077 | 2.1504 | 1.33999 |
| BGWO [61] | 6.0130 | 5.3112 | 4.4953 | 3.5079 | 2.1461 | 1.33996 |
| m-SCA [59] | 6.0089 | 5.3049 | 4.5023 | 3.5077 | 2.1504 | 1.33999 |
| MFO [60] | 5.9849 | 5.3167 | 4.4973 | 3.5136 | 2.1616 | 1.33999 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, H.; Meng, T.; Cao, Y. Fuzzy Strategy Grey Wolf Optimizer for Complex Multimodal Optimization Problems. Sensors 2022, 22, 6420. https://doi.org/10.3390/s22176420
Qin H, Meng T, Cao Y. Fuzzy Strategy Grey Wolf Optimizer for Complex Multimodal Optimization Problems. Sensors. 2022; 22(17):6420. https://doi.org/10.3390/s22176420
Chicago/Turabian StyleQin, Hua, Tuanxing Meng, and Yuyi Cao. 2022. "Fuzzy Strategy Grey Wolf Optimizer for Complex Multimodal Optimization Problems" Sensors 22, no. 17: 6420. https://doi.org/10.3390/s22176420
APA StyleQin, H., Meng, T., & Cao, Y. (2022). Fuzzy Strategy Grey Wolf Optimizer for Complex Multimodal Optimization Problems. Sensors, 22(17), 6420. https://doi.org/10.3390/s22176420