A Novel High-Speed Resonant Frequency Tracking Method Using Transient Characteristics in a Piezoelectric Transducer


Abstract
1. Introduction
2. Analysis of the Piezoelectric Transducer
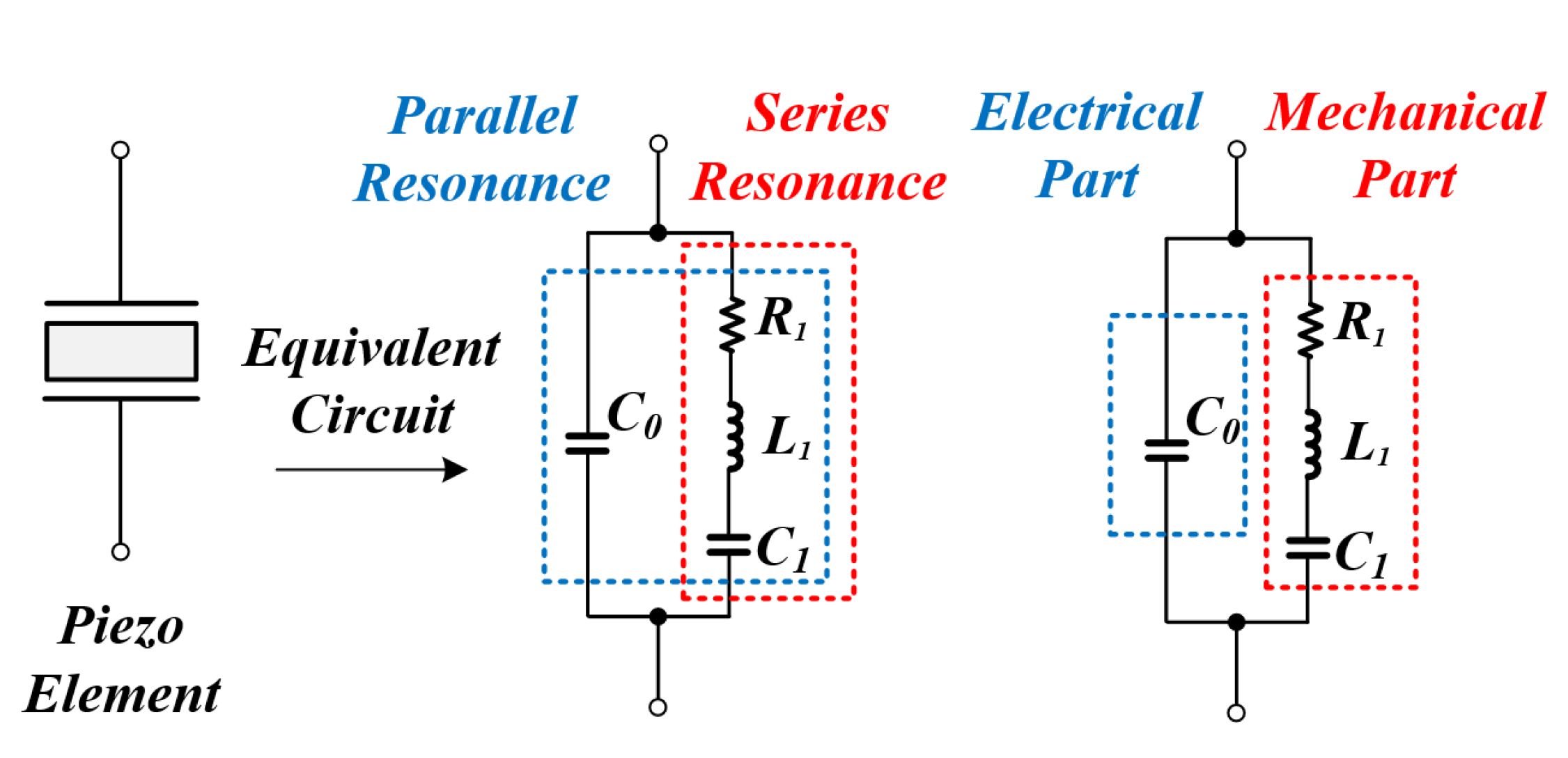
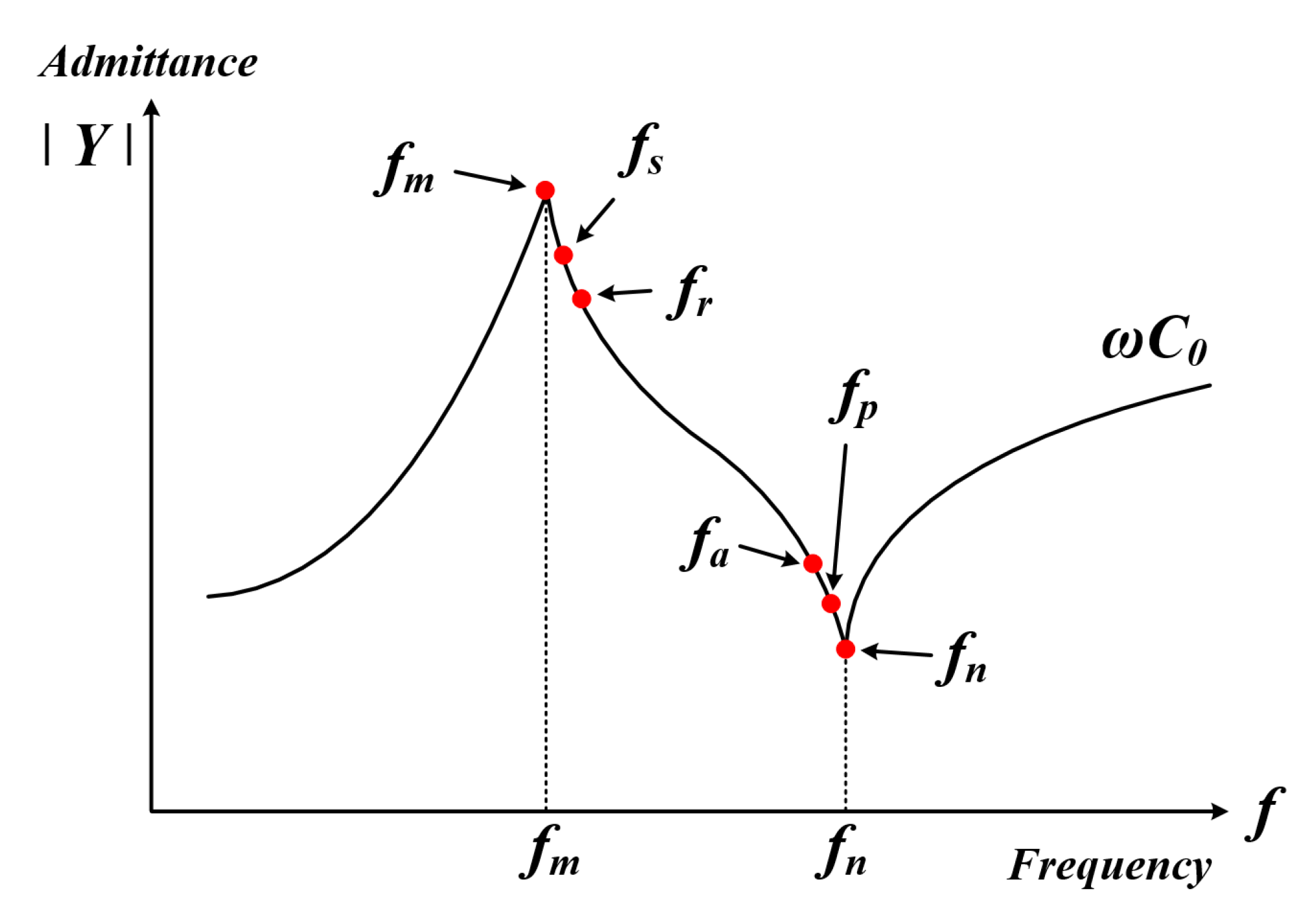
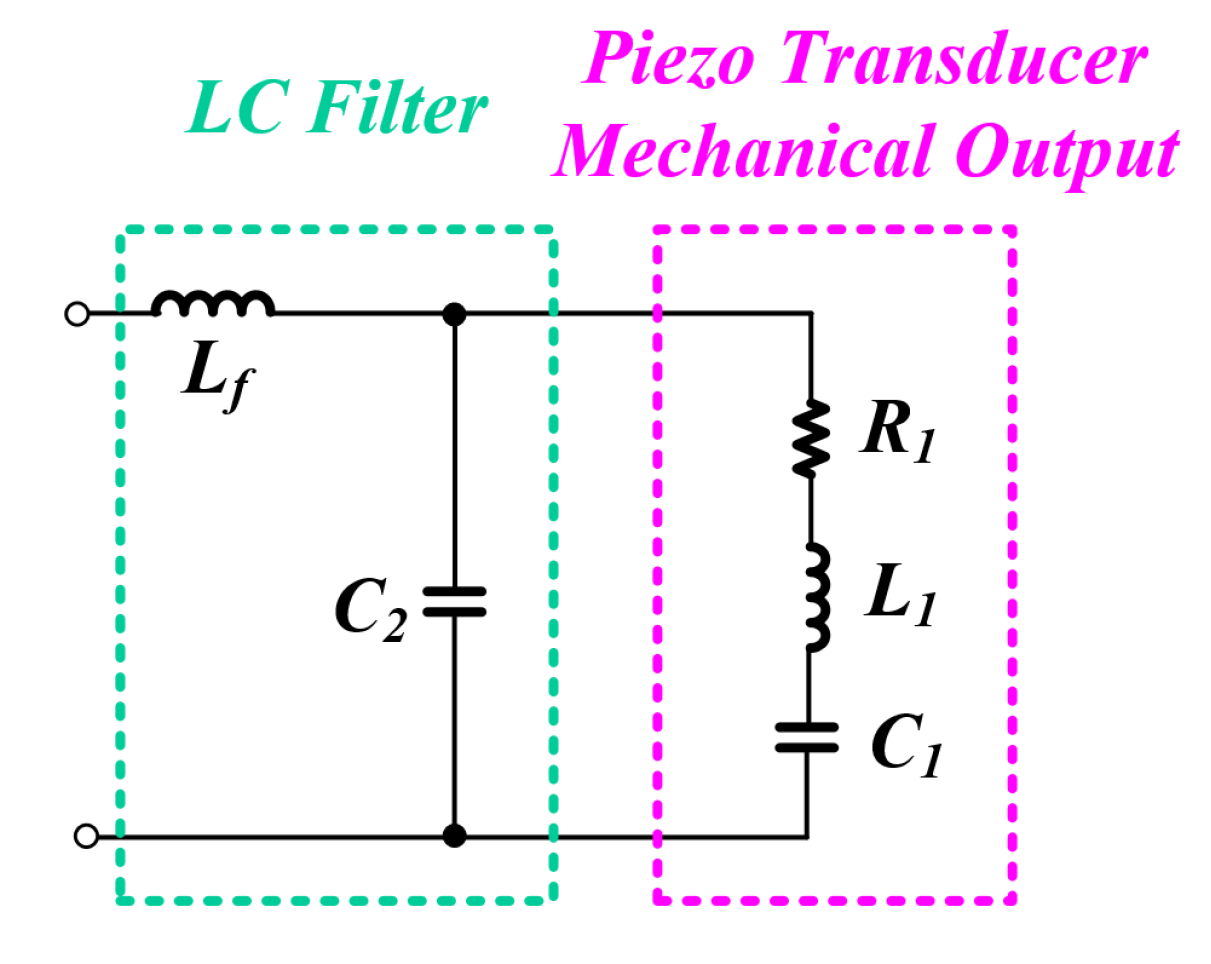
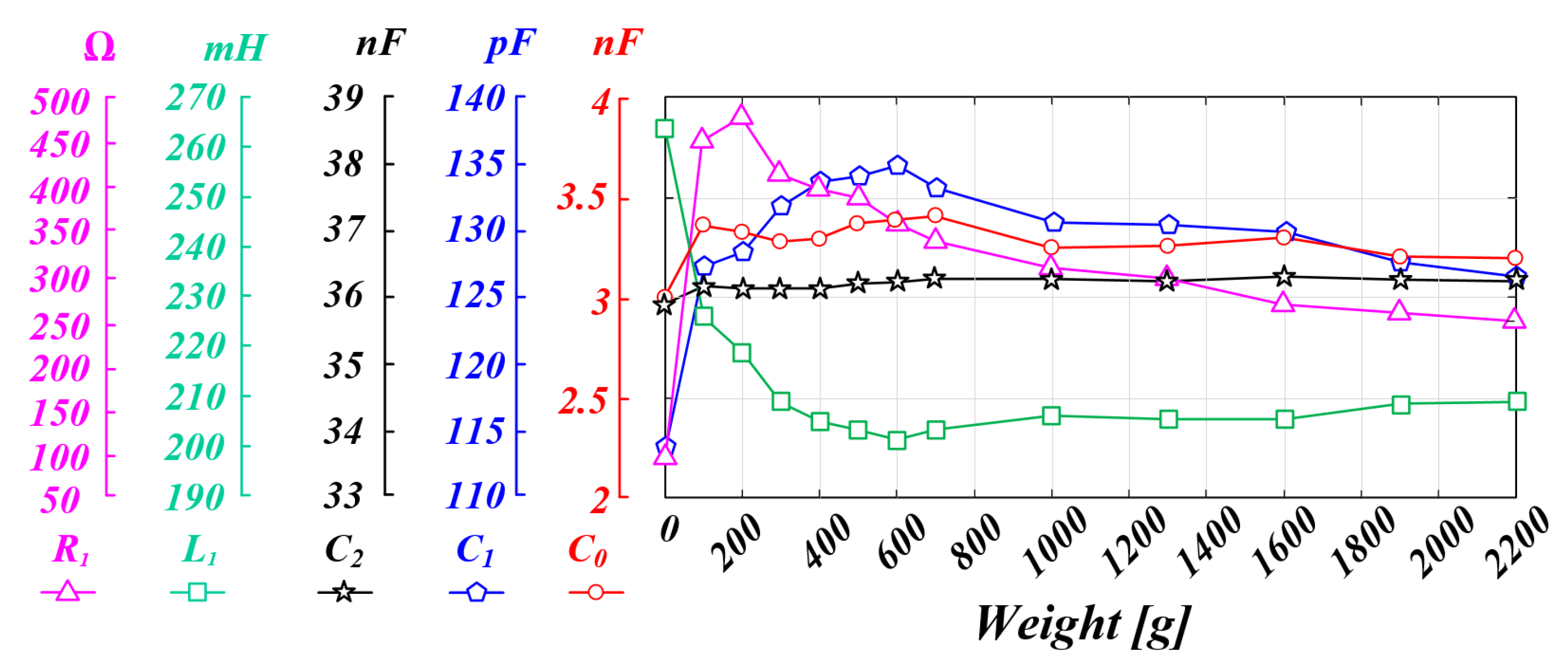
2.1. Equivalent Model and Resonant Characteristics
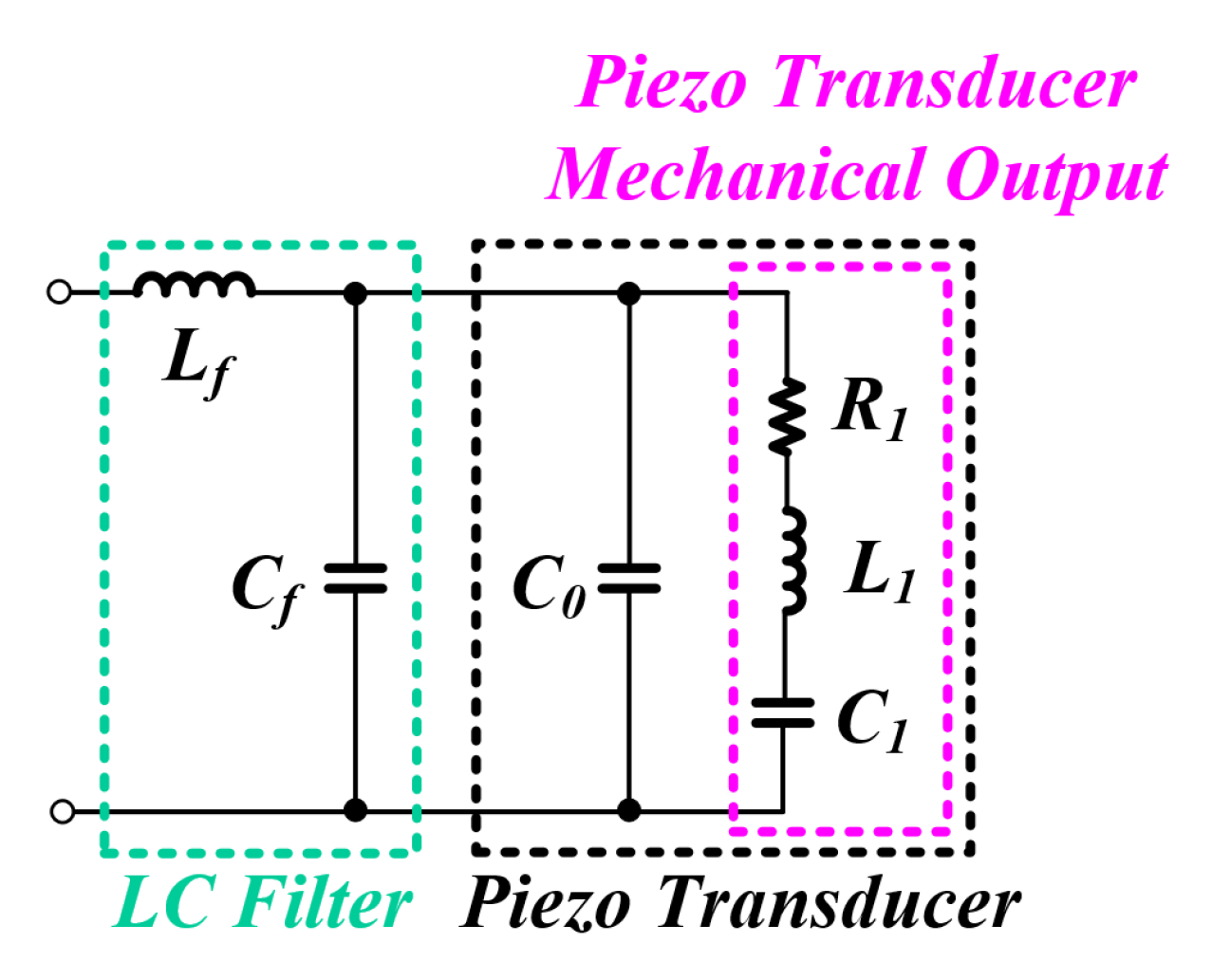
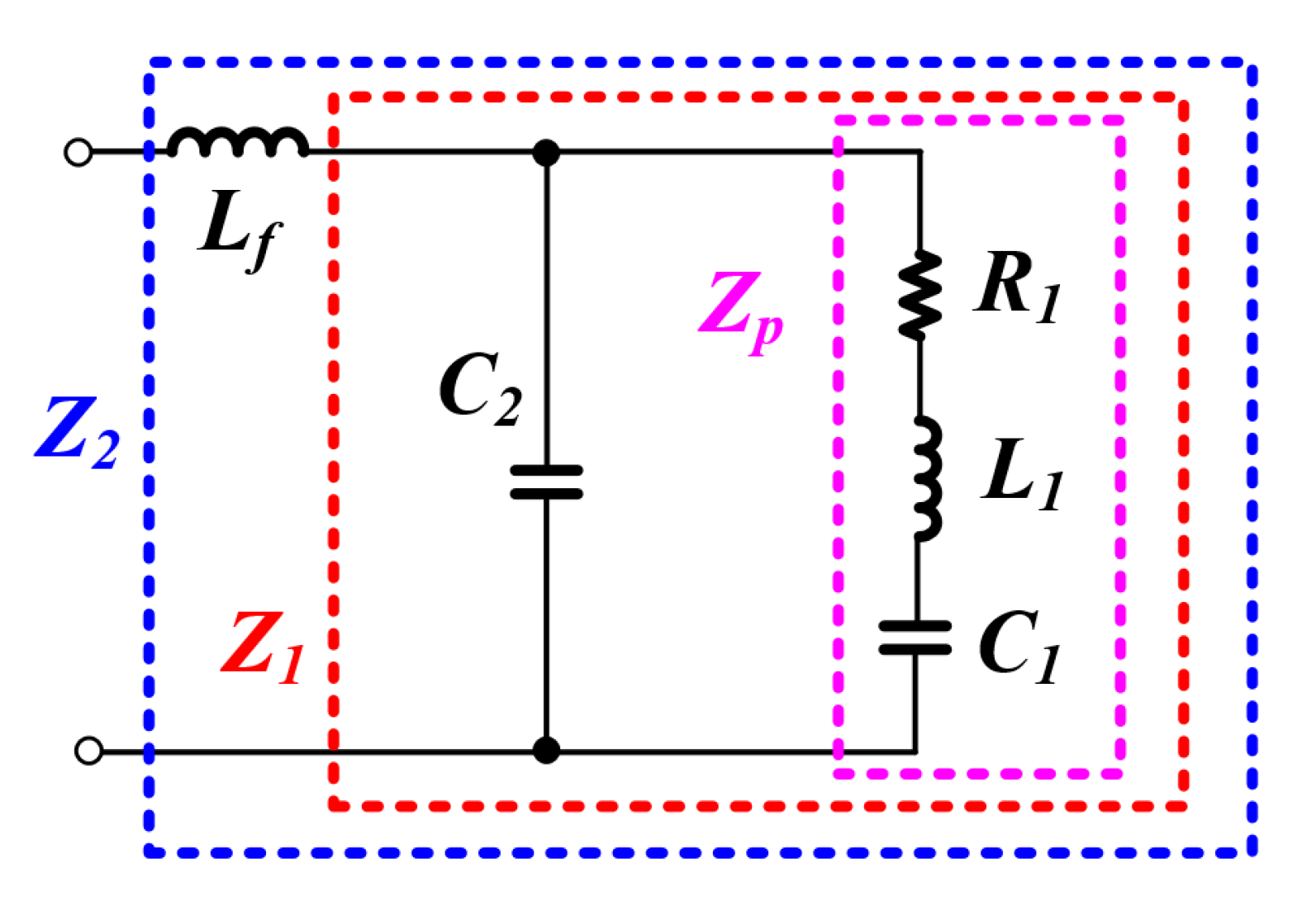
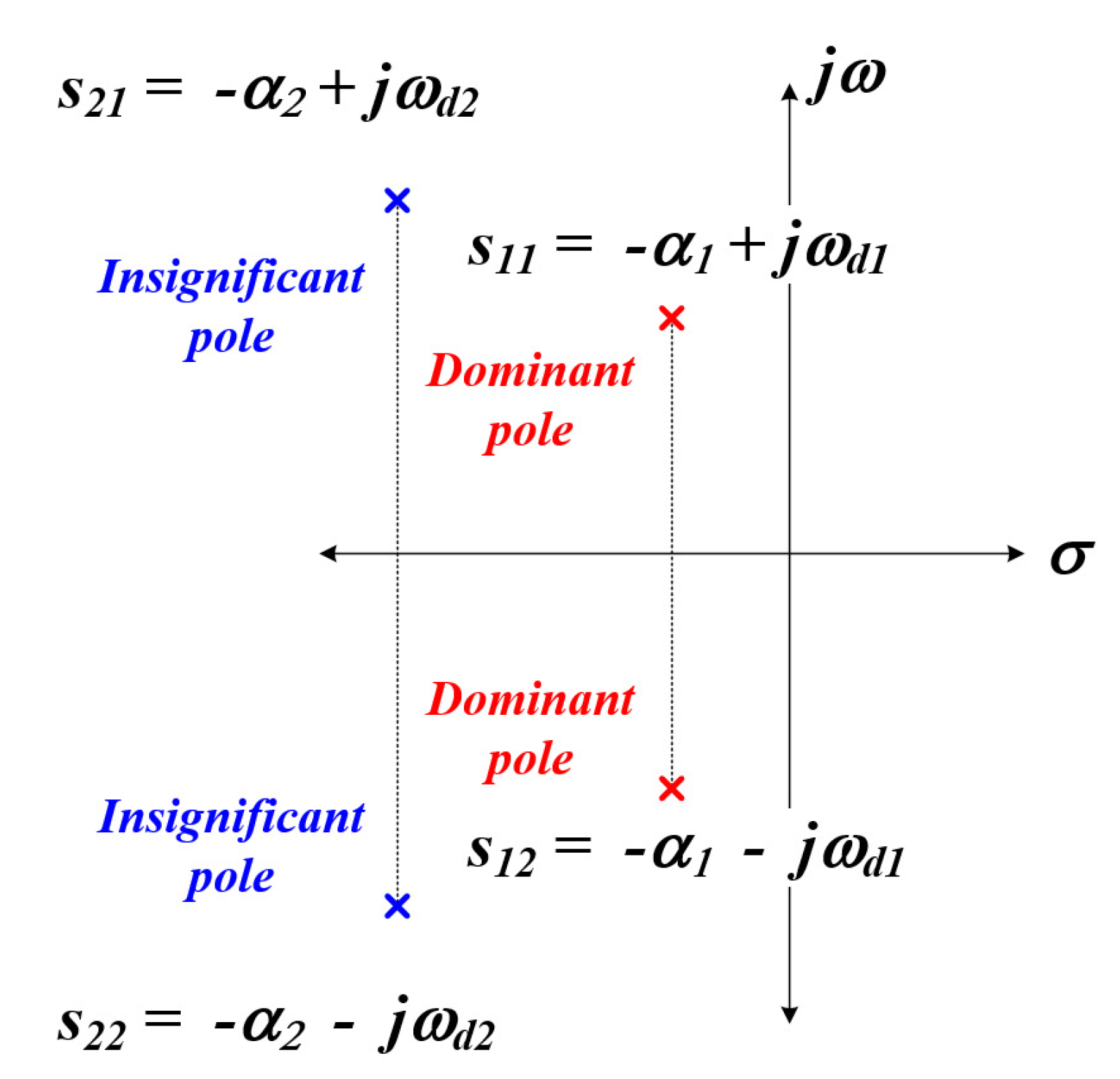
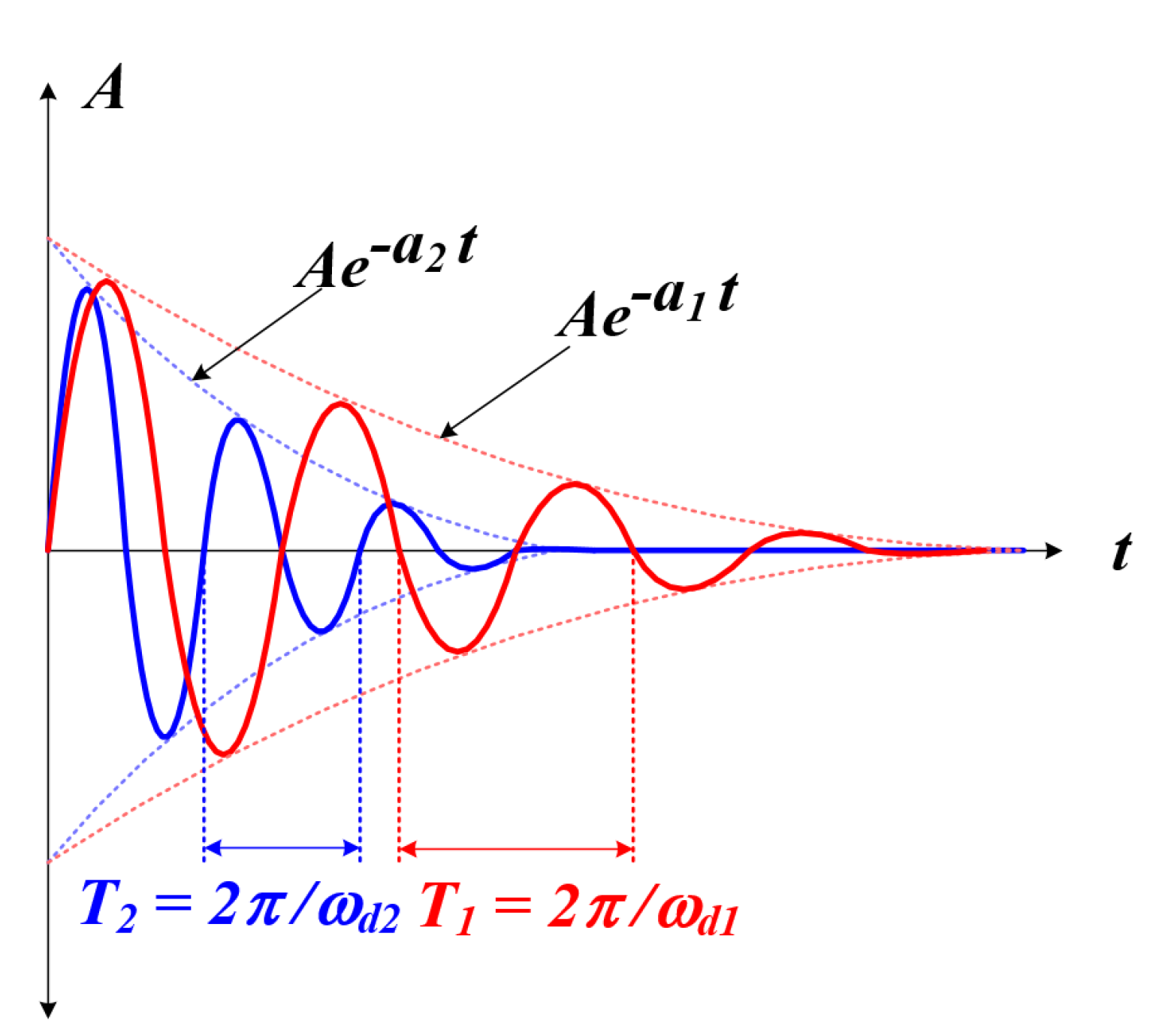
2.2. Analysis of the Whole System Equivalent Model
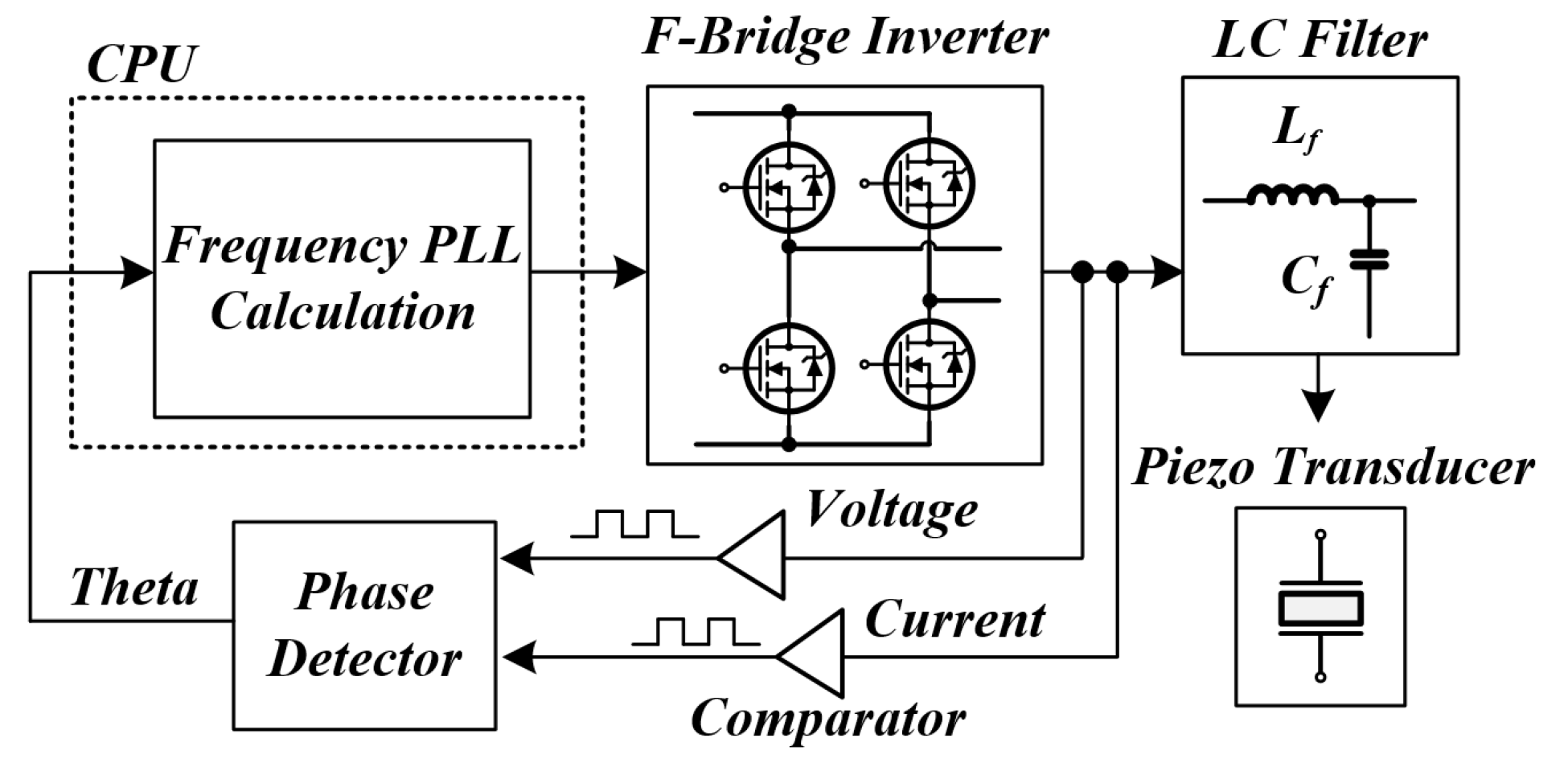
3. Resonant Tracking Method
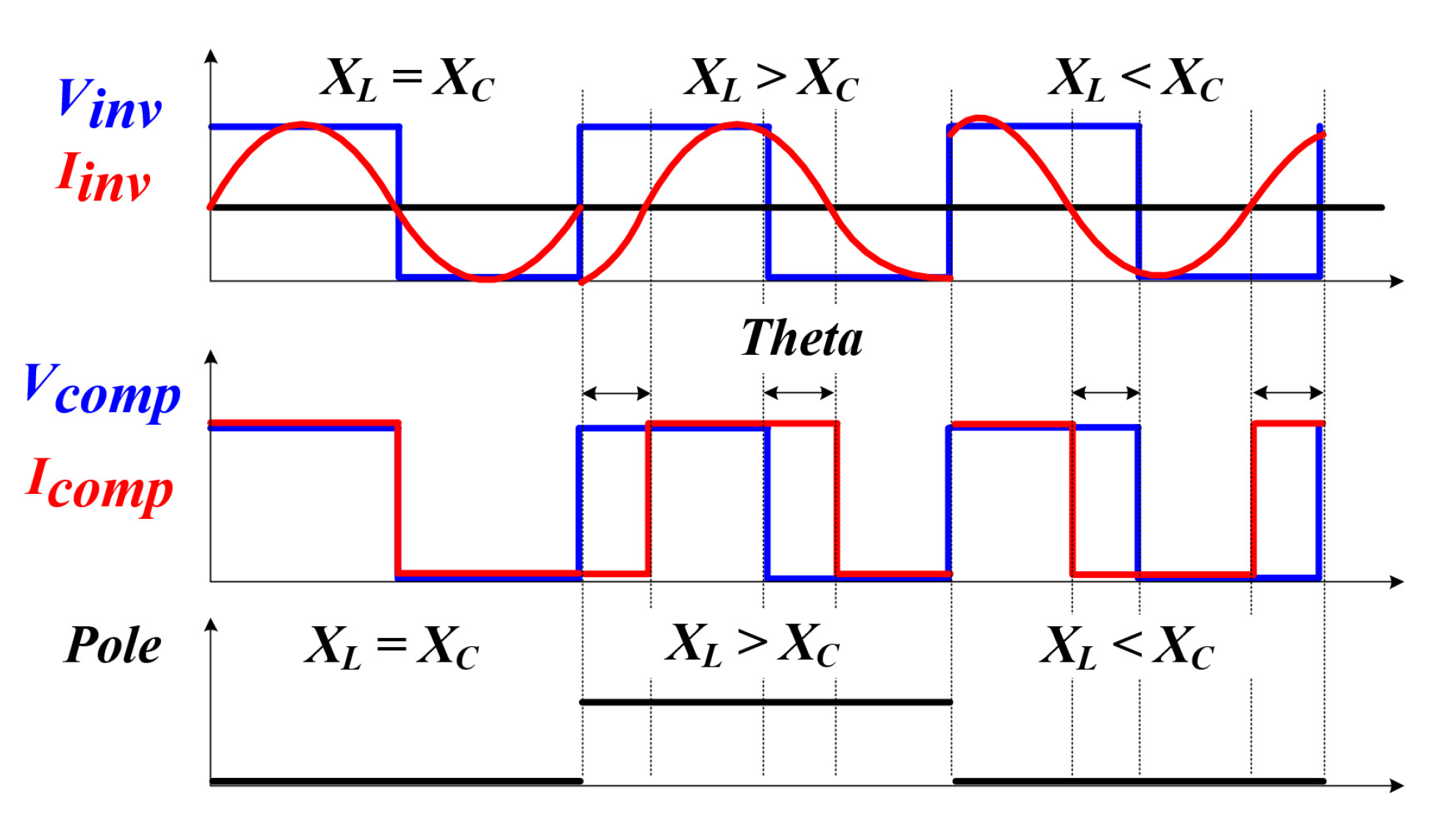
3.1. Conventional Resonant Tracking Method
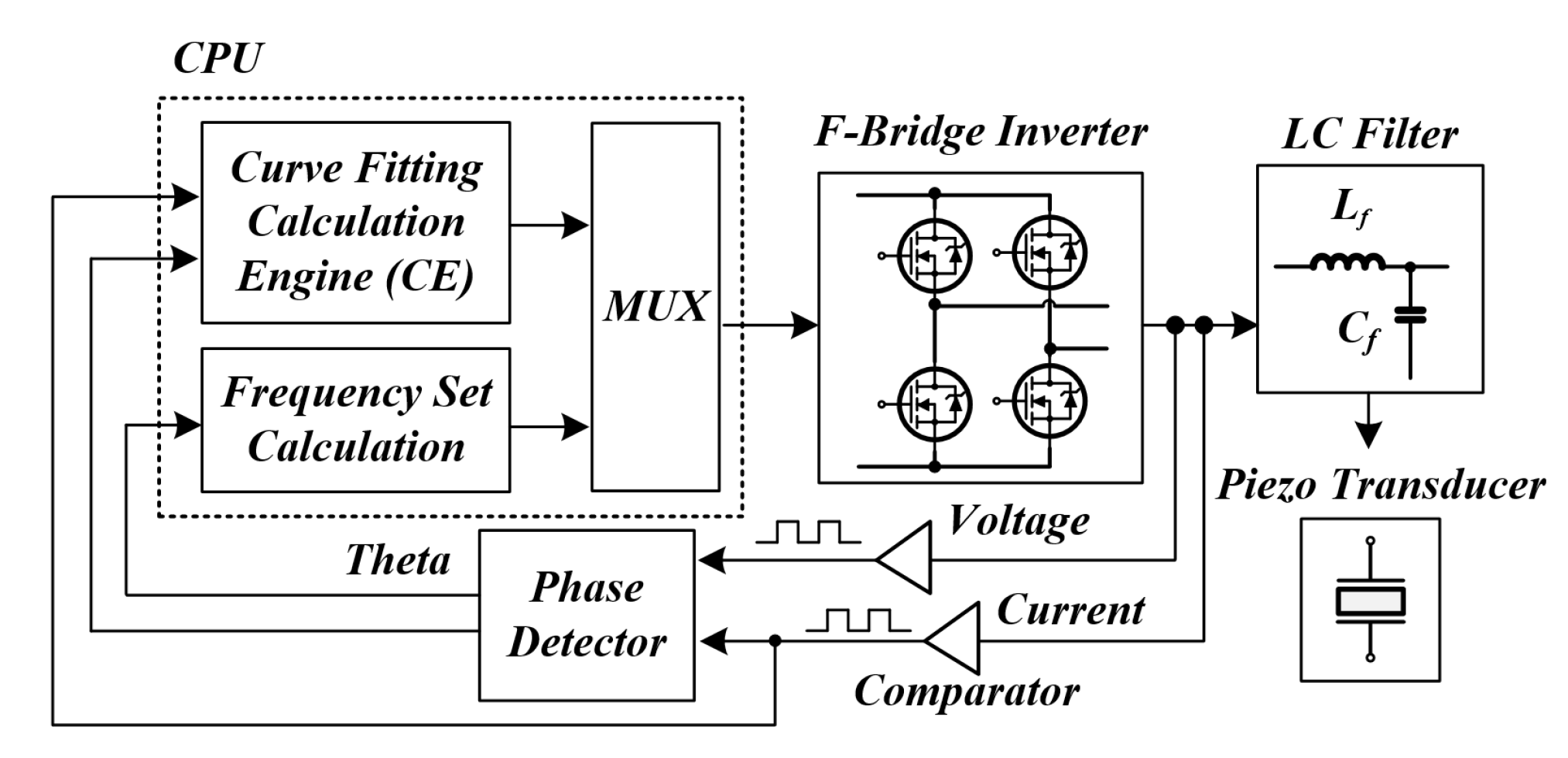
3.2. Proposed Resonant Tracking Method
4. Simulation
5. Experiment Result
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, Z.; Liao, Z.; Wang, D.; Wang, C.; Song, C.; Li, H.; Liu, Y. Recent Advances in Soft Biological Tissue Manipulating Technologies. Chin. J. Mech. Eng. 2022, 35, 1–34. [Google Scholar] [CrossRef]
- Kentish, S.; Feng, H. Applications of power ultrasound in food processing. Annu. Rev. Food Sci. Technol. 2014, 5, 263–284. [Google Scholar] [CrossRef] [PubMed]
- Andújar, D.; Weis, M.; Gerhards, R. An ultrasonic system for weed detection in cereal crops. Sensors 2012, 12, 17343–17357. [Google Scholar] [CrossRef] [PubMed]
- Hong, J.P.; Jung, S.H.; Won, T.H.; Kwon, S.J. A Study on Ultrasonic Welding System Design. In Proceedings of the KIPE Conference; The Korean Institute of Power Electronics: Seoul, Korea, 2008; pp. 164–166. [Google Scholar]
- Howells, C.A. Piezoelectric energy harvesting. Energy Convers. Manag. 2009, 50, 1847–1850. [Google Scholar] [CrossRef]
- Harada, T.; Ishikawa, N.; Kanda, T.; Suzumori, K.; Yamada, Y.; Sotowa, K.I. Droplet generation using a torsional Langevin-type transducer and a micropore plate. Sens. Actuators A Phys. 2009, 155, 168–174. [Google Scholar] [CrossRef]
- Asumi, K.; Fukunaga, R.; Fujimura, T.; Kurosawa, M.K. High speed, high resolution ultrasonic linear motor using V-shape two bolt-clamped Langevin-type transducers. Acoust. Sci. Technol. 2009, 30, 180–186. [Google Scholar] [CrossRef]
- Zhou, Q.; Lam, K.H.; Zheng, H.; Qiu, W.; Shung, K.K. Piezoelectric single crystal ultrasonic transducers for biomedical applications. Prog. Mater. Sci. 2014, 66, 87–111. [Google Scholar] [CrossRef]
- Cheng, L.C.; Kang, Y.C.; Chen, C.L. A resonance-frequency-tracing method for a current-fed piezoelectric transducer. IEEE Trans. Ind. Electron. 2014, 61, 6031–6040. [Google Scholar] [CrossRef]
- Jung, W.S.; Kang, M.G.; Moon, H.G.; Baek, S.H.; Yoon, S.J.; Wang, Z.L.; Kim, S.W.; Kang, C.Y. High output piezo/triboelectric hybrid generator. Sci. Rep. 2015, 5, 1–6. [Google Scholar] [CrossRef]
- Wang, X. Piezoelectric nanogenerators-Harvesting ambient mechanical energy at the nanometer scale. Nano Energy 2012, 1, 13–24. [Google Scholar] [CrossRef]
- Jiang, X.; Zhu, X.; Wong, C.Y.; Zhang, D.; Geng, D. Theory of series inductance matching to transducer at premechanical resonance zone in ultrasonic vibration cutting. IEEE Trans. Ind. Electron. 2018, 66, 3019–3029. [Google Scholar] [CrossRef]
- Yu, H.; Zhou, J.; Deng, L.; Wen, Z. A vibration-based MEMS piezoelectric energy harvester and power conditioning circuit. Sensors 2014, 14, 3323–3341. [Google Scholar] [CrossRef] [PubMed]
- Malikan, M.; Eremeyev, V.A. On the dynamics of a visco–piezo–flexoelectric nanobeam. Symmetry 2020, 12, 643. [Google Scholar] [CrossRef]
- Chen, J.; Li, P.; Song, G.; Ren, Z. Piezo-based wireless sensor network for early-age concrete strength monitoring. Optik 2016, 127, 2983–2987. [Google Scholar] [CrossRef]
- Tao, Y.; Hwachun, L.; Dongheon, L.; Sunggun, S.; Dongok, K.; Sungjun, P. Design of LC resonant inverter for ultrasonic metal welding system. In Proceedings of the 2008 International Conference on Smart Manufacturing Application, Goyangi, Korea, 9–11 April 2008; pp. 543–548. [Google Scholar]
- Kuang, Y.; Jin, Y.; Cochran, S.; Huang, Z. Resonance tracking and vibration stablilization for high power ultrasonic transducers. Ultrasonics 2014, 54, 187–194. [Google Scholar] [CrossRef] [PubMed]
- Jiang, C.; Li, Q.; Huang, J.; Bi, S.; Ji, R.; Guo, Q. Single-layer MoS2 mechanical resonant piezo-sensors with high mass sensitivity. ACS Appl. Mater. Interfaces 2020, 12, 41991–41998. [Google Scholar] [CrossRef] [PubMed]
- Sonmezoglu, S.; Darvishian, A.; Shen, K.; Bustamante, M.J.; Kandala, A.; Maharbiz, M.M. A Method and Analysis to Enable Efficient Piezoelectric Transducer-Based Ultrasonic Power and Data Links for Miniaturized Implantable Medical Devices. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2021, 68, 3362–3370. [Google Scholar] [CrossRef]
- Liu, X.; Colli-Menchi, A.I.; Gilbert, J.; Friedrichs, D.A.; Malang, K.; Sánchez-Sinencio, E. An automatic resonance tracking scheme with maximum power transfer for piezoelectric transducers. IEEE Trans. Ind. Electron. 2015, 62, 7136–7145. [Google Scholar] [CrossRef]
- Chung, S.; Yoo, W.M.; Park, Y.G.; Shin, K.S.; Park, B.Y. Ultrasonic surgical aspiration with endoscopic confirmation for osmidrosis. Br. J. Plast. Surg. 2000, 53, 212–214. [Google Scholar] [CrossRef]
- Ben-Yaakov, S.; Lineykin, S. Maximum power tracking of piezoelectric transformer HV converters under load variations. IEEE Trans. Power Electron. 2006, 21, 73–78. [Google Scholar] [CrossRef]
- Mortimer, B.; Du Bruyn, T.; Davies, J.; Tapson, J. High power resonant tracking amplifier using admittance locking. Ultrasonics 2001, 39, 257–261. [Google Scholar] [CrossRef]
- Shi, W.; Zhao, H.; Ma, J.; Yao, Y. An optimum-frequency tracking scheme for ultrasonic motor. IEEE Trans. Ind. Electron. 2017, 64, 4413–4422. [Google Scholar] [CrossRef]
- Jiang, X.; Zhang, X.; Zhu, X.; Sui, H.; Zhang, D. Study of phase shift control in high-speed ultrasonic vibration cutting. IEEE Trans. Ind. Electron. 2017, 65, 2467–2474. [Google Scholar] [CrossRef]
- Ghenna, S.; Giraud, F.; Giraud-Audine, C.; Amberg, M. Vector control of piezoelectric transducers and ultrasonic actuators. IEEE Trans. Ind. Electron. 2017, 65, 4880–4888. [Google Scholar] [CrossRef]
- Wang, J.D.; Jiang, J.J.; Duan, F.J.; Cheng, S.Y.; Peng, C.X.; Liu, W.; Qu, X.H. A high-tolerance matching method against load fluctuation for ultrasonic transducers. IEEE Trans. Power Electron. 2019, 35, 1147–1155. [Google Scholar] [CrossRef]
- Long, Z.; Pan, Z.; Li, C.; Zhang, J. Constant amplitude control of high-power ultrasonic drive system. In Proceedings of the 2014 IEEE International Conference on Information and Automation (ICIA), Hailar, China, 28–30 July 2014; pp. 582–586. [Google Scholar]
- Yang, C.; Sun, H.; Liu, S.; Qiu, L.; Fang, Z.; Zheng, Y. A Broadband Resonant Noise Matching Technique for Piezoelectric Ultrasound Transducers. IEEE Sens. J. 2019, 20, 4290–4299. [Google Scholar] [CrossRef]
- Rathod, V.T. A review of electric impedance matching techniques for piezoelectric sensors, actuators and transducers. Electronics 2019, 8, 169. [Google Scholar] [CrossRef]
- Thangavelu, A.; Senthilkumar, V.; Parvathyshankar, D. Zero voltage switching-pulse width modulation technique-based interleaved flyback converter for remote power solutions. IET Power Electron. 2016, 9, 1381–1390. [Google Scholar] [CrossRef]
- Li, W.; Xu, D.; Wu, B.; Zhao, Y.; Yang, H.; He, X. Zero-voltage-switching dual-boost converter with multi-functional inductors and improved symmetrical rectifier for distributed generation systems. IET Power Electron. 2012, 5, 969–977. [Google Scholar] [CrossRef]
- Zhou, H.; Huang, S.; Li, W. Electrical impedance matching between piezoelectric transducer and power amplifier. IEEE Sens. J. 2020, 20, 14273–14281. [Google Scholar] [CrossRef]
- Yuan, T.; Dong, X.; Shekhani, H.; Li, C.; Maida, Y.; Tou, T.; Uchino, K. Driving an inductive piezoelectric transducer with class E inverter. Sens. Actuators A Phys. 2017, 261, 219–227. [Google Scholar] [CrossRef]
- Lin, S.; Xu, J. Effect of the matching circuit on the electromechanical characteristics of sandwiched piezoelectric transducers. Sensors 2017, 17, 329. [Google Scholar] [CrossRef] [PubMed]
- Park, G.; Farrar, C.R.; Rutherford, A.C.; Robertson, A.N. Piezoelectric active sensor self-diagnostics using electrical admittance measurements. J. Vib. Acoust. 2006, 128, 469–476. [Google Scholar] [CrossRef]
- Fernández-Afonso, Y.; García-Zaldívar, O.; Calderón-Piñar, F. Equivalent circuit for the characterization of the resonance mode in piezoelectric systems. J. Adv. Dielectr. 2015, 5, 1550032. [Google Scholar] [CrossRef]
- Kauczor, C.; Frohleke, N. Inverter topologies for ultrasonic piezoelectric transducers with high mechanical Q-factor. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No. 04CH37551), Aachen, Germany, 20–25 June 2004; Volume 4, pp. 2736–2741. [Google Scholar]
- Vistyzenko, Y.; Movchanyuk, A.; Sushko, I.; Novosad, A. LL-type filter for piezoelectric transducer. In Proceedings of the 2017 International Conference on Information and Telecommunication Technologies and Radio Electronics (UkrMiCo), Odessa, Ukraine, 11–15 September 2017; pp. 1–6. [Google Scholar]
- BuchAcz, A.; PłAczek, M.; WróBel, A. Modelling of passive vibration damping using piezoelectric transducers—The mathematical model. Eksploat. I Niezawodn. 2014, 16, 301–306. [Google Scholar]
- Yang, Y.; Tang, L. Equivalent circuit modeling of piezoelectric energy harvesters. J. Intell. Mater. Syst. Struct. 2009, 20, 2223–2235. [Google Scholar] [CrossRef]
- Boontaklang, S.; Chompoo-Inwai, C. Automatic Resonance-Frequency Tuning and Tracking Technique for a 1 MHz Ultrasonic-Piezoelectric-Transducer Driving Circuit in Medical Therapeutic Applications Using dsPIC Microcontroller and PLL Techniques. Int. J. Intell. Eng. Syst 2019, 12, 14–24. [Google Scholar]
- Liu, X.; Colli-Menchi, A.I.; Sanchez-Sinencio, E. 21.4 A reduced-order sliding-mode controller with an auxiliary PLL frequency discriminator for ultrasonic electric scalpels. In Proceedings of the 2017 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 5–9 February 2017; pp. 358–359. [Google Scholar]
- Swain, A.; Almakhles, D.; Hou, Y.; Patel, N.; Madawala, U. A sigma-delta modulator based pi controller for bidirectional inductive power transfer systems. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–6. [Google Scholar]
- Lee, W.C.; Lee, T.K.; Lee, S.H.; Kim, K.H.; Hyun, D.S.; Suh, I.Y. A master and slave control strategy for parallel operation of three-phase UPS systems with different ratings. In Proceedings of the Nineteenth Annual IEEE Applied Power Electronics Conference and Exposition APEC’04, Anaheim, CA, USA, 22–26 February 2004; Volume 1, pp. 456–462. [Google Scholar]
- Sathyan, S.; Suryawanshi, H.M.; Singh, B.; Chakraborty, C.; Verma, V.; Ballal, M.S. ZVS–ZCS high voltage gain integrated boost converter for DC microgrid. IEEE Trans. Ind. Electron. 2016, 63, 6898–6908. [Google Scholar] [CrossRef]
- Gu, B.; Dominic, J.; Chen, B.; Zhang, L.; Lai, J.S. Hybrid transformer ZVS/ZCS DC–DC converter with optimized magnetics and improved power devices utilization for photovoltaic module applications. IEEE Trans. Power Electron. 2014, 30, 2127–2136. [Google Scholar] [CrossRef]
- Gallego-Juarez, J.A.; Riera, E.; Acosta, V.; Rodríguez, G.; Blanco, A. Ultrasonic system for continuous washing of textiles in liquid layers. Ultrason. Sonochem. 2010, 17, 234–238. [Google Scholar] [CrossRef]
- Kuczek, T.; Florkowski, M.; Piasecki, W. Transformer switching with vacuum circuit breaker: Case study of PV inverter LC filters impact on transient overvoltages. IEEE Trans. Power Deliv. 2015, 31, 44–49. [Google Scholar] [CrossRef]
- Karthigeyan, K.; Radha, S. Single event transient study on PMOS-NMOS cross-coupled LC-VCO using PLL. Int. J. Electron. 2021, 108, 378–394. [Google Scholar] [CrossRef]
- Wang, Z.; Hu, H. Calculation of the rightmost characteristic root of retarded time-delay systems via Lambert W function. J. Sound Vib. 2008, 318, 757–767. [Google Scholar] [CrossRef]
- Muravskii, G. On frequency independent damping. J. Sound Vib. 2004, 274, 653–668. [Google Scholar] [CrossRef]
- Jordi, B.E.; Cotter, C.J.; Sherwin, S.J. An adaptive selective frequency damping method. Phys. Fluids 2015, 27, 094104. [Google Scholar] [CrossRef]
- Din, Q.; Qureshi, M.; Khan, A.Q. Dynamics of a fourth-order system of rational difference equations. Adv. Differ. Equ. 2012, 2012, 1–15. [Google Scholar] [CrossRef]
- Lee, C.H.; Teng, C.C. Calculation of PID controller parameters by using a fuzzy neural network. ISA Trans. 2003, 42, 391–400. [Google Scholar] [CrossRef]
- Li, Y.; Sheng, A.; Qi, Q. Further results on guaranteed dominant pole placement with PID controllers. In Proceedings of the 30th Chinese Control Conference, Yantai, China, 22–24 July 2011; pp. 3756–3760. [Google Scholar]
- Dincel, E.; Söylemez, M.T. Limitations on dominant pole pair selection with continuous PI and PID controllers. In Proceedings of the 2016 International Conference on Control, Decision and Information Technologies (CoDIT), Saint Julian’s, Malta, 6–8 April 2016; pp. 741–745. [Google Scholar]
- Zhao, H.; Li, Y.; Lin, Q.; Wang, S. The parasitic capacitance of magnetic components with ferrite cores due to time-varying electromagnetic (EM) field. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 3534–3541. [Google Scholar]
- Ismail, O.; Bandyopadhyay, B. Interval system reduction using Padé approximation to allow retention of dominant poles. Int. J. Model. Simul. 1998, 18, 341–345. [Google Scholar] [CrossRef]
- Kumar, A.; Mandal, R.; Raushan, R.; Gauri, P. Design and Analysis of the Gate Driver Circuit for Power Semiconductor Switches. In Proceedings of the 2020 International Conference on Emerging Frontiers in Electrical and Electronic Technologies (ICEFEET), Patna, India, 10–11 July 2020; pp. 1–6. [Google Scholar]
- Sagar, P.; Madhava, P.P. A novel, high speed window comparator circuit. In Proceedings of the 2013 International Conference on Circuits, Power and Computing Technologies (ICCPCT), Nagercoil, India, 20–21 March 2013; pp. 691–693. [Google Scholar]
- Holmes, D.G.; Lipo, T.A. Pulse Width Modulation for Power Converters: Principles and Practice; John Wiley & Sons: Hoboken, NJ, USA, 2003; Volume 18. [Google Scholar]
- Barr, M. Pulse width modulation. Embed. Syst. Program. 2001, 14, 103–104. [Google Scholar]
- Motulsky, H.; Christopoulos, A. Fitting Models to Biological Data Using Linear and Nonlinear Regression: A Practical Guide to Curve Fitting; Oxford University Press: Oxford, UK, 2004. [Google Scholar]
- Lueders, M.; Eversmann, B.; Gerber, J.; Huber, K.; Kuhn, R.; Zwerg, M.; Schmitt-Landsiedel, D.; Brederlow, R. Architectural and circuit design techniques for power management of ultra-low-power MCU systems. IEEE Trans. Very Large Scale Integr. VLSI Syst. 2013, 22, 2287–2296. [Google Scholar] [CrossRef]
- Chen, D.; Wang, L.; Luo, X.; Fei, C.; Li, D.; Shan, G.; Yang, Y. Recent development and perspectives of optimization design methods for piezoelectric ultrasonic transducers. Micromachines 2021, 12, 779. [Google Scholar] [CrossRef] [PubMed]
- Brown, L.F. Design considerations for piezoelectric polymer ultrasound transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2000, 47, 1377–1396. [Google Scholar] [CrossRef] [PubMed]
- Xu, Q.; Zhang, X.; Zhou, W.; Zuo, S. Development of Portable Digital HVDC Generator Based on MCU and CPLD. In Proceedings of the 2012 Asia-Pacific Power and Energy Engineering Conference, Shanghai, China, 27–29 March 2012; pp. 1–5. [Google Scholar]
- Rentmeister, J.S.; Kiani, M.H.; Pister, K.; Stauth, J.T. A 120–330 V, Sub-μA, 4-Channel Driver for Microrobotic Actuators with Wireless-Optical Power Delivery and over 99% Current Efficiency. In Proceedings of the 2020 IEEE Symposium on VLSI Circuits, Honolulu, HI, USA, 16–19 June 2020; pp. 1–2. [Google Scholar]
- Jiang, Y. Design Methodology for Class D Ultrasound Transducer Drivers. Ph.D. Thesis, Lakehead University, Thunder Bay, ON, Canada, 2021. [Google Scholar]
- Wang, L.; Burgos, R.P.; Carazo, A.V. Design and analysis of tunable piezoelectric transformer based DC/DC converter with ac output inductor. In Proceedings of the 2020 IEEE Applied Power Electronics Conference and Exposition (APEC), New Orleans, LA, USA, 15–19 March 2020; pp. 1398–1403. [Google Scholar]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency | Characteristics |
|---|---|
| Mechanical series resonant frequency | |
| Mechanical parallel resonant frequency | |
| Resonant frequency | |
| Anti-resonant frequency | |
| Admittance absolute value becomes extremely large | |
| Admittance absolute value becomes extremely small |
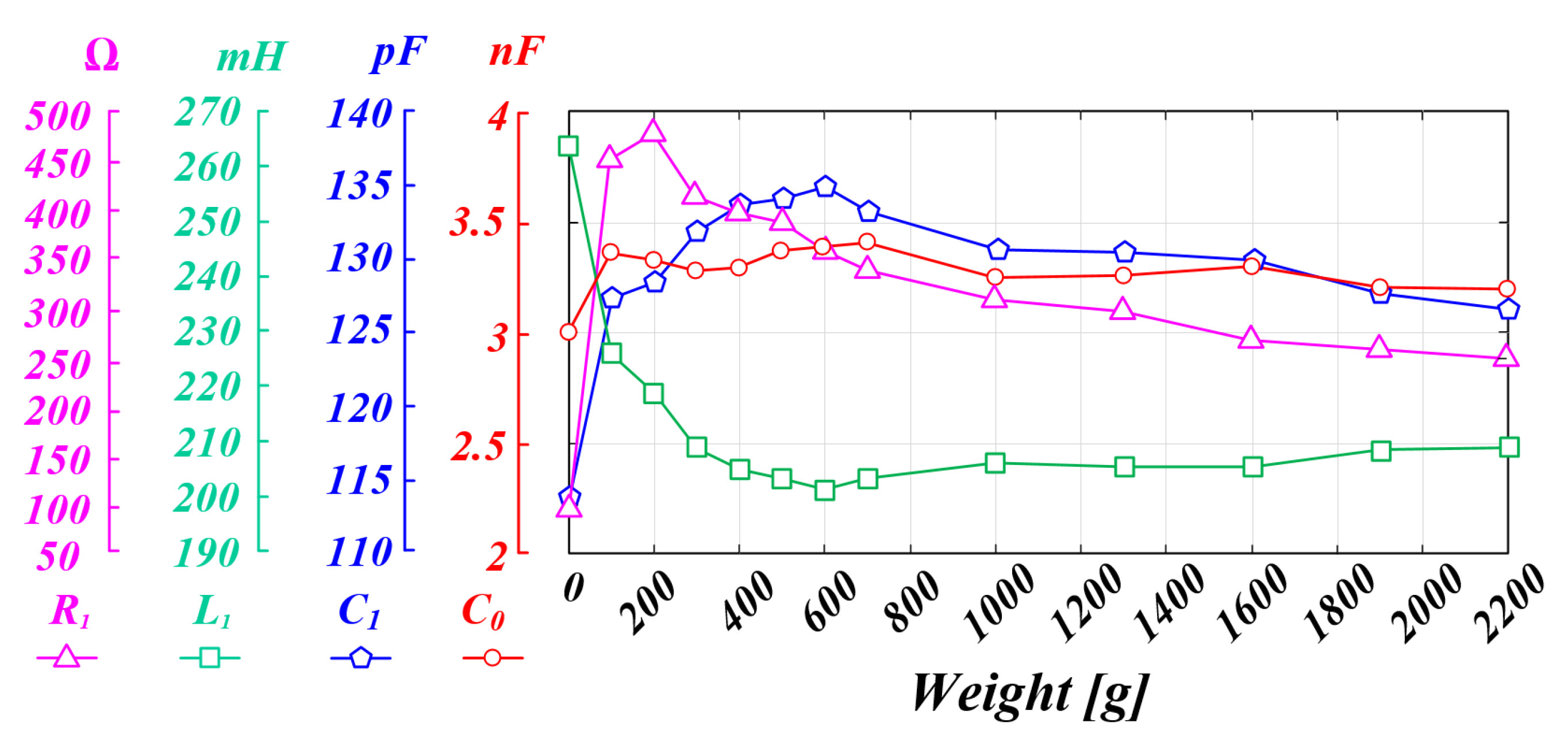
| Parameters | Parameter Values | Conditions |
|---|---|---|
| 220 | - | |
| 190 to 240 mH | Increase by 1 mH | |
| 120 to 140 pF | Increase by 1 pF | |
| 3.25 nF | Fix values | |
| 870 H | - | |
| 33 nF | - | |
| Filter resonant frequency | 28.3 kHz | Filter capacitor |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moon, J.; Park, S.; Lim, S. A Novel High-Speed Resonant Frequency Tracking Method Using Transient Characteristics in a Piezoelectric Transducer. Sensors 2022, 22, 6378. https://doi.org/10.3390/s22176378
Moon J, Park S, Lim S. A Novel High-Speed Resonant Frequency Tracking Method Using Transient Characteristics in a Piezoelectric Transducer. Sensors. 2022; 22(17):6378. https://doi.org/10.3390/s22176378
Chicago/Turabian StyleMoon, Jeonghoon, Sungjun Park, and Sangkil Lim. 2022. "A Novel High-Speed Resonant Frequency Tracking Method Using Transient Characteristics in a Piezoelectric Transducer" Sensors 22, no. 17: 6378. https://doi.org/10.3390/s22176378
APA StyleMoon, J., Park, S., & Lim, S. (2022). A Novel High-Speed Resonant Frequency Tracking Method Using Transient Characteristics in a Piezoelectric Transducer. Sensors, 22(17), 6378. https://doi.org/10.3390/s22176378