
Automotive IoT Ethernet-Based Communication Technologies Applied in a V2X Context via a Multi-Protocol Gateway



Abstract
:1. Introduction
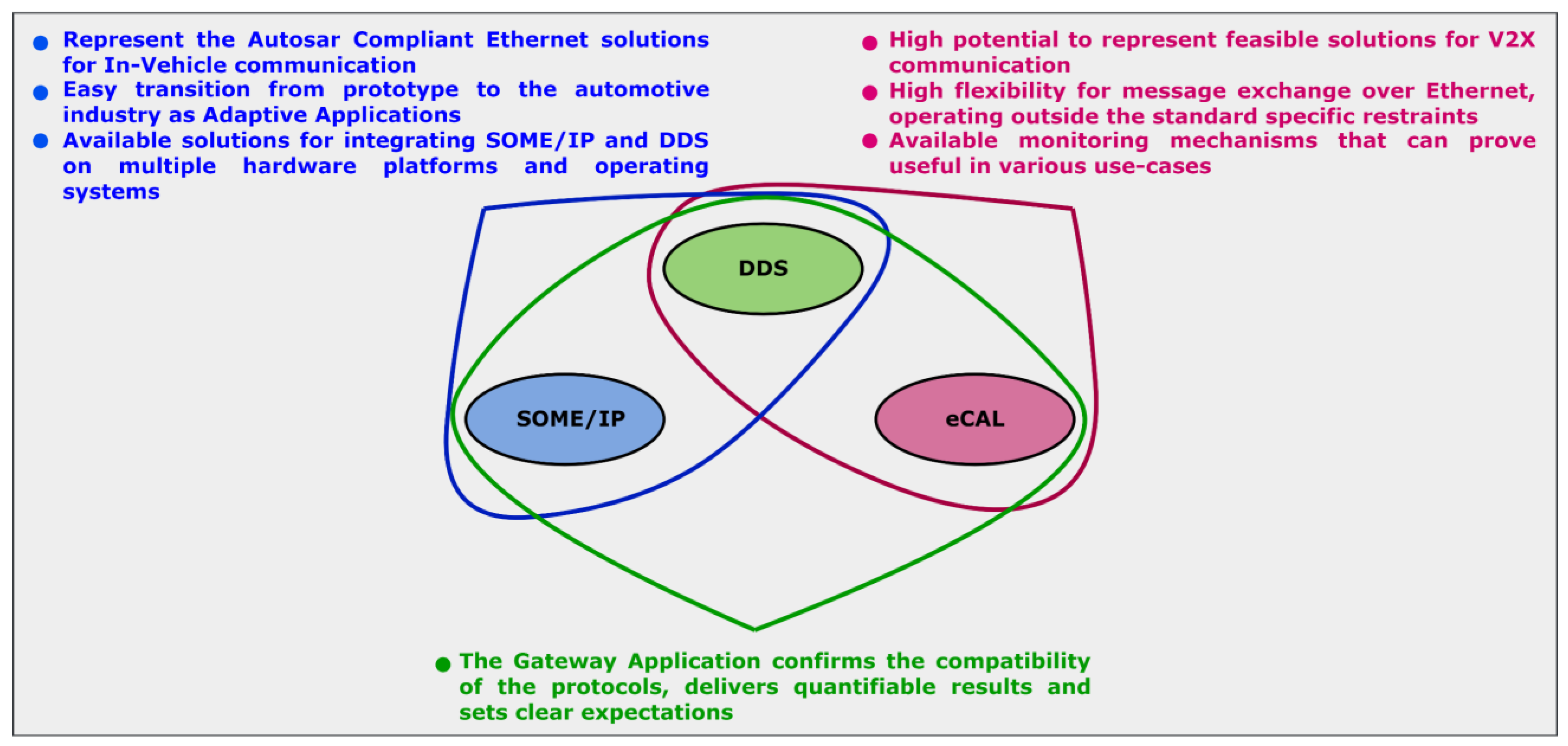
- Analyze the compatibility of the selected communication technologies, combining strategies and visions with high potential and highlighting advantages and disadvantages from multiple perspectives, allowing a better understanding of how each protocol can be used in the right context.
- Define an appropriate architecture aligned with the latest adaptive architectural principles that includes necessary elements for increased applicability in automotive and IIoT applications, and addresses challenges specific to Ethernet technologies.
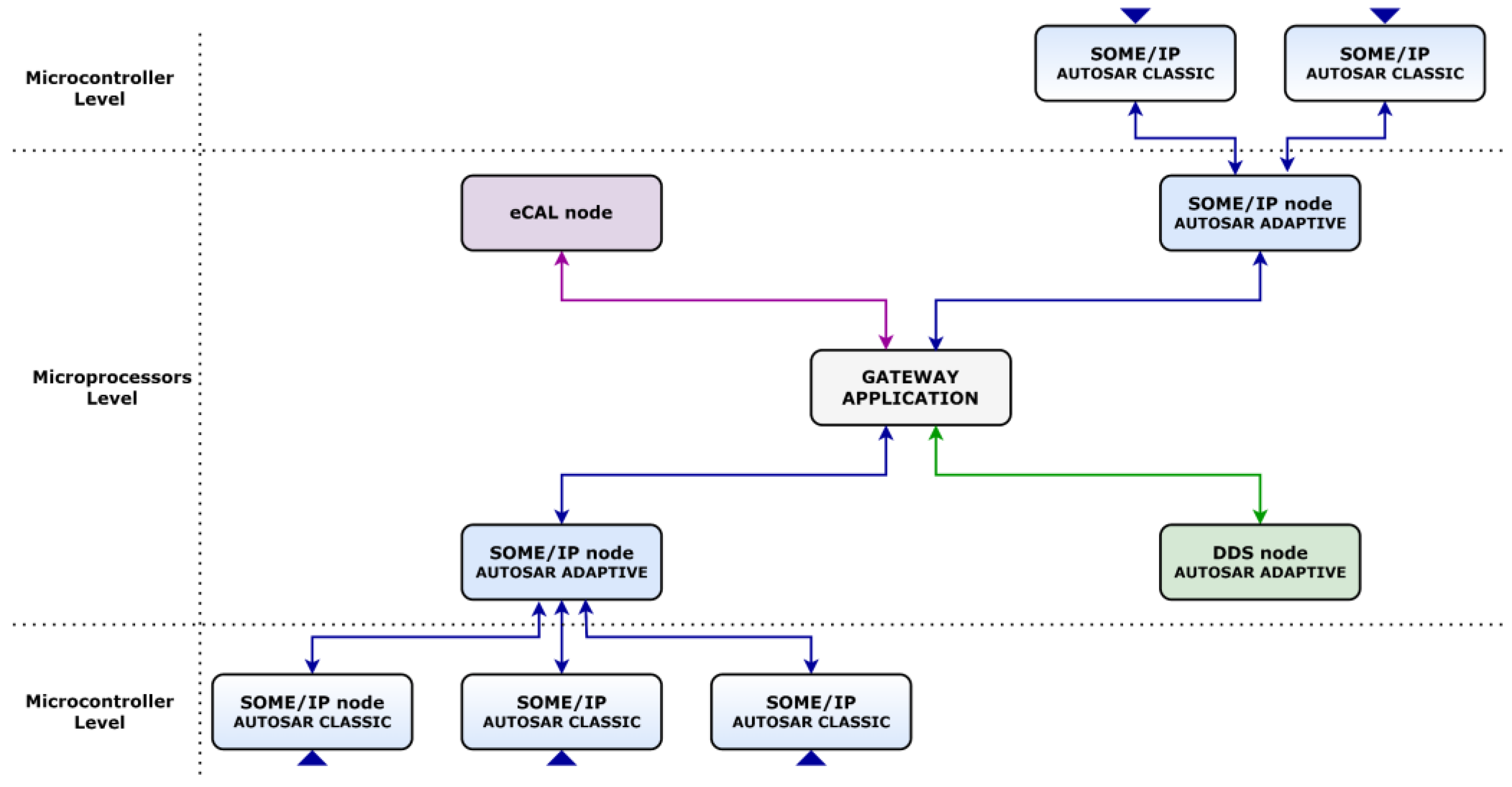
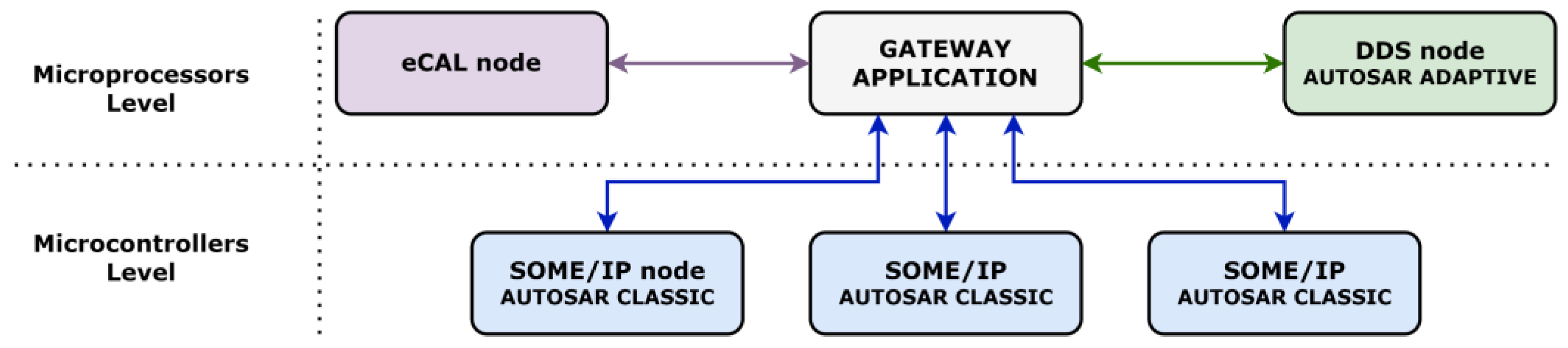
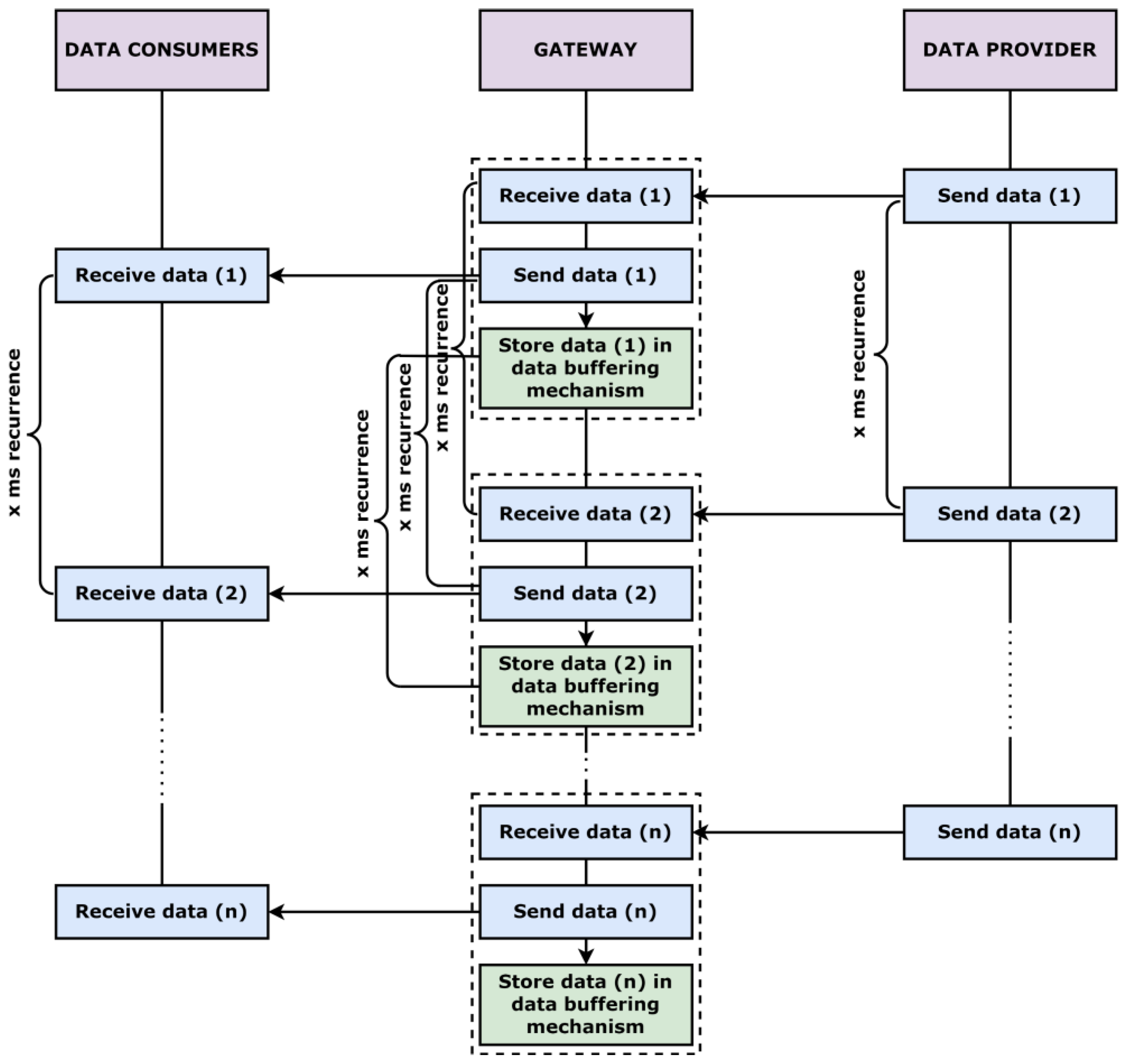
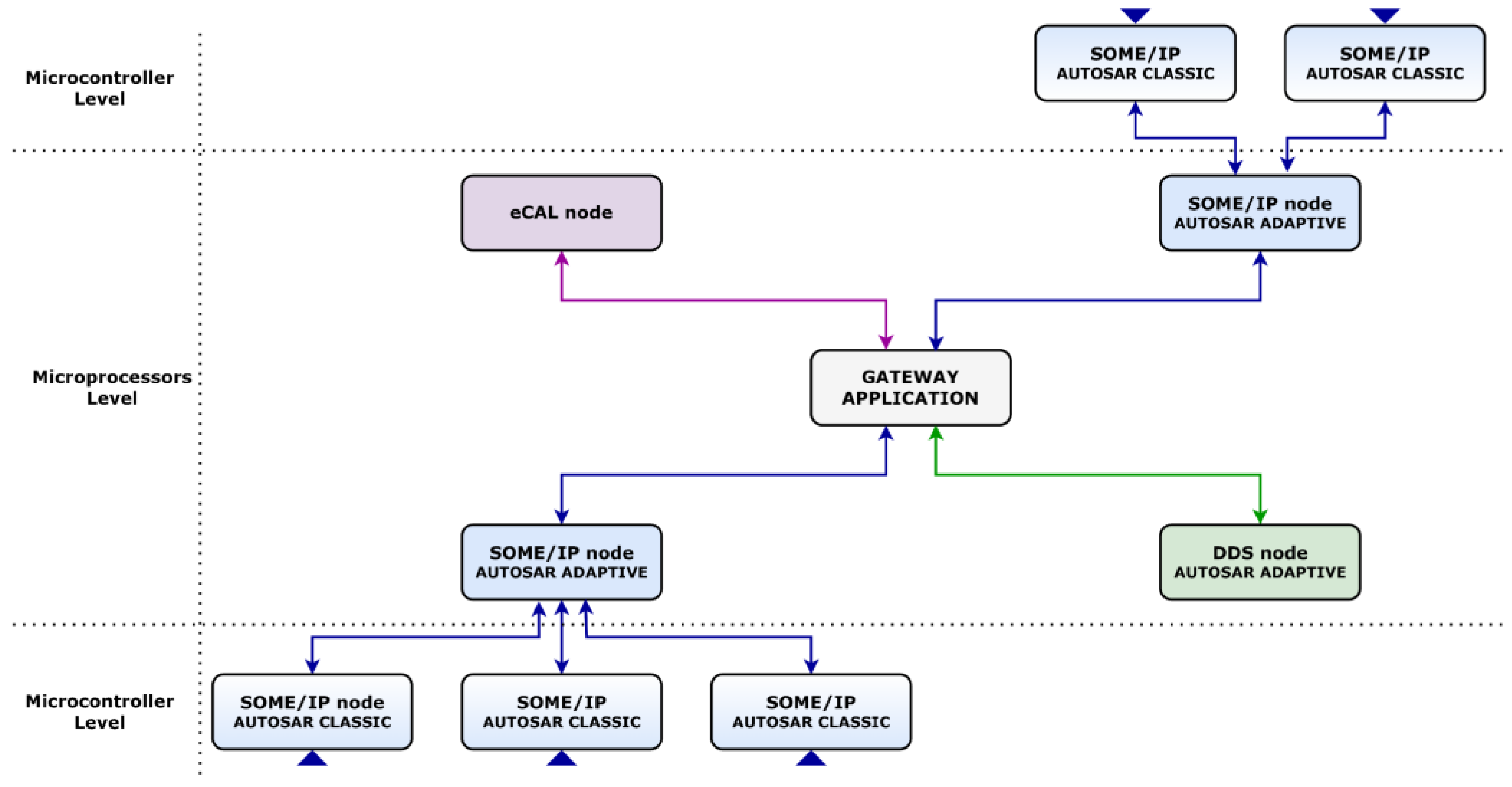
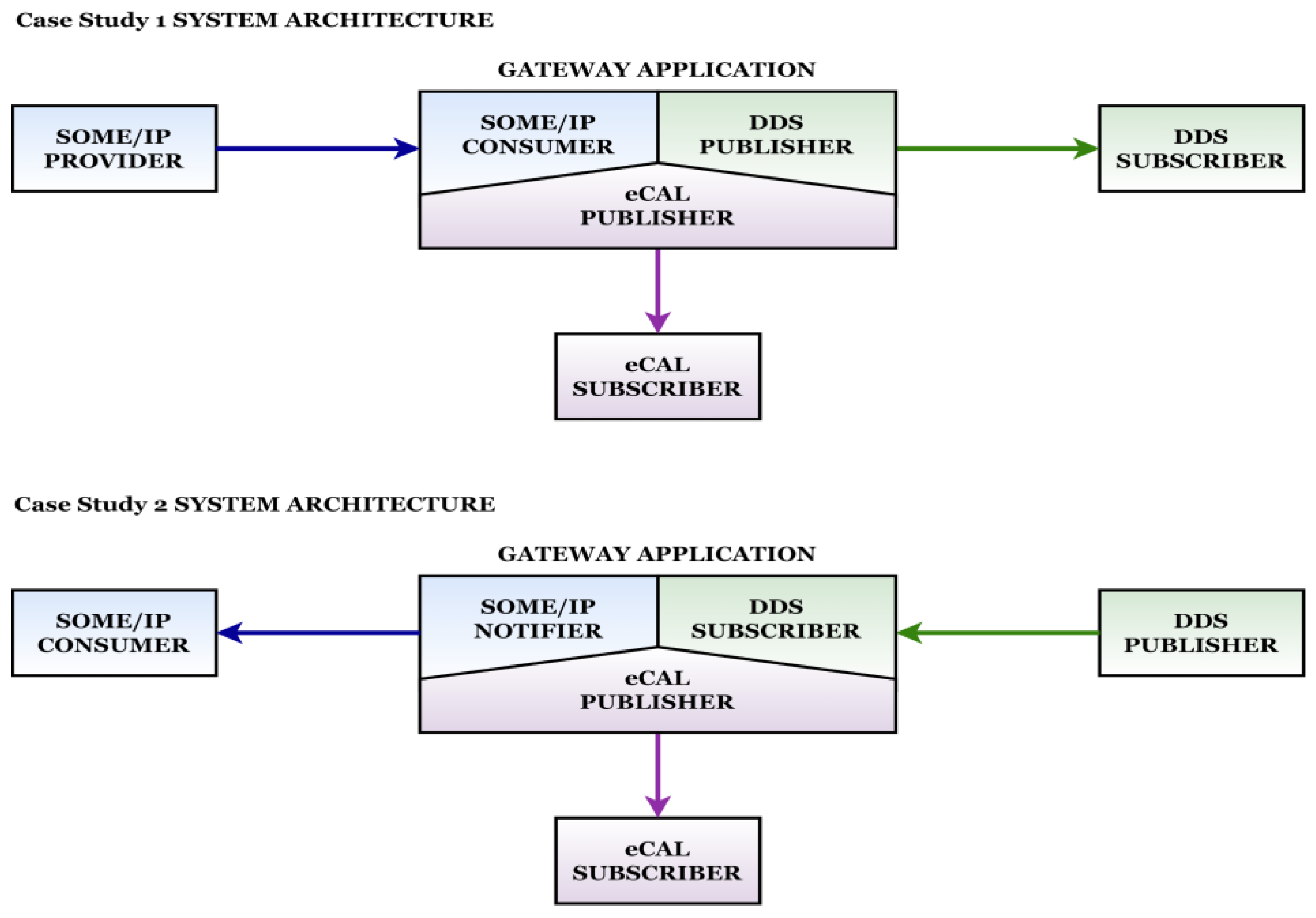
- Conceive and develop a configurable multi-protocol gateway solution that can interface completely separated SOME/IP, DDS, and eCAL entities, expanding the applicability towards V2X concepts and interactions between communication structures specific to different industrial fields.
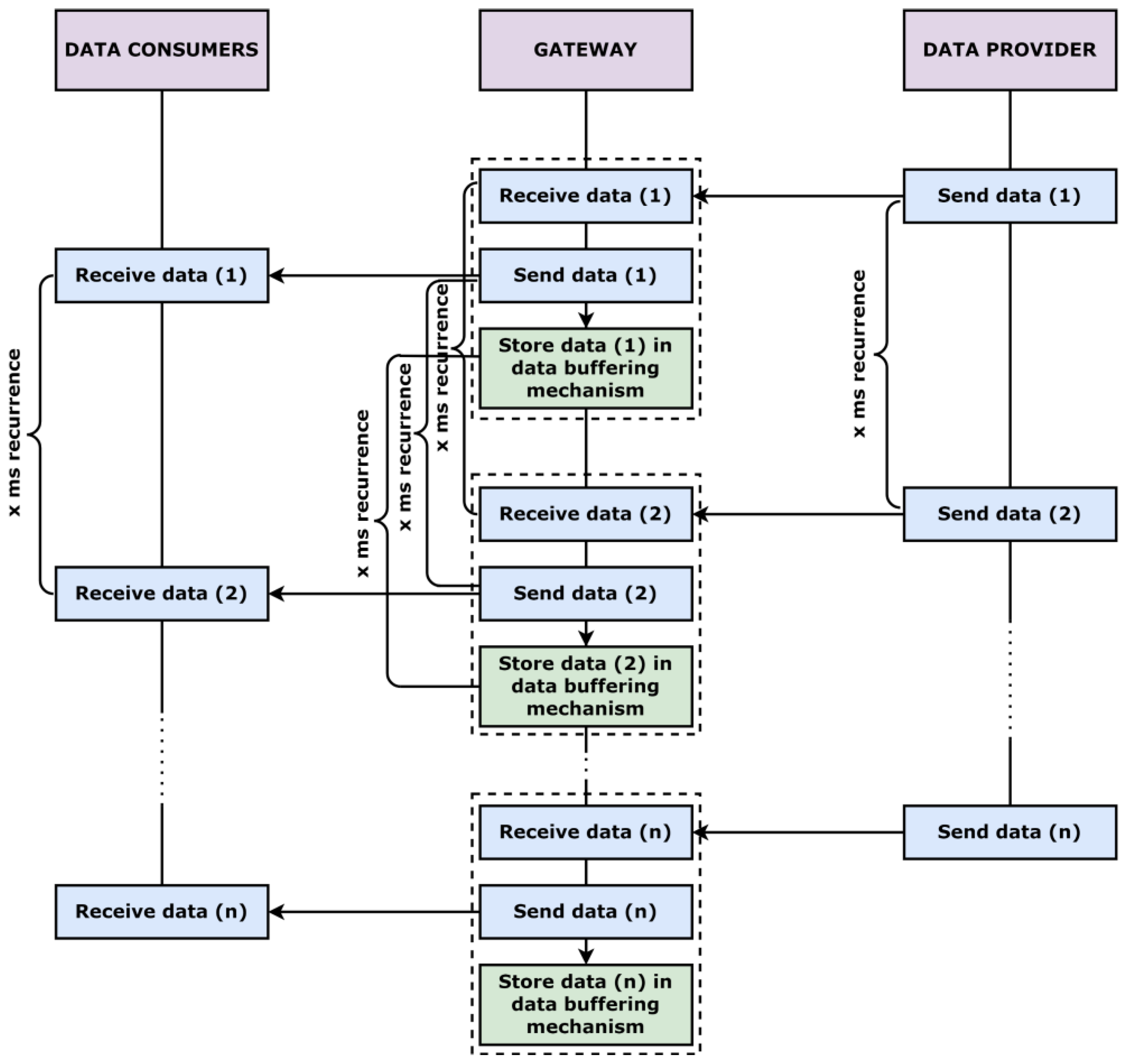
- Explore real-time capabilities of the multi-protocol gateway solution, examining the possible impact of future achievable improvements and establishing a clear set of expectations concerning the evolving industrial requirements.
2. Automotive Applicability Study
3. Tools and Technologies in the Current State-of-the-Art Context
3.1. Scalable Service-Oriented Middleware over IP (SOME/IP)
3.2. Data Distribution Service (DDS)
3.3. Enhanced Communication Abstraction Layer (eCAL)
3.4. Selected Context of Related Work
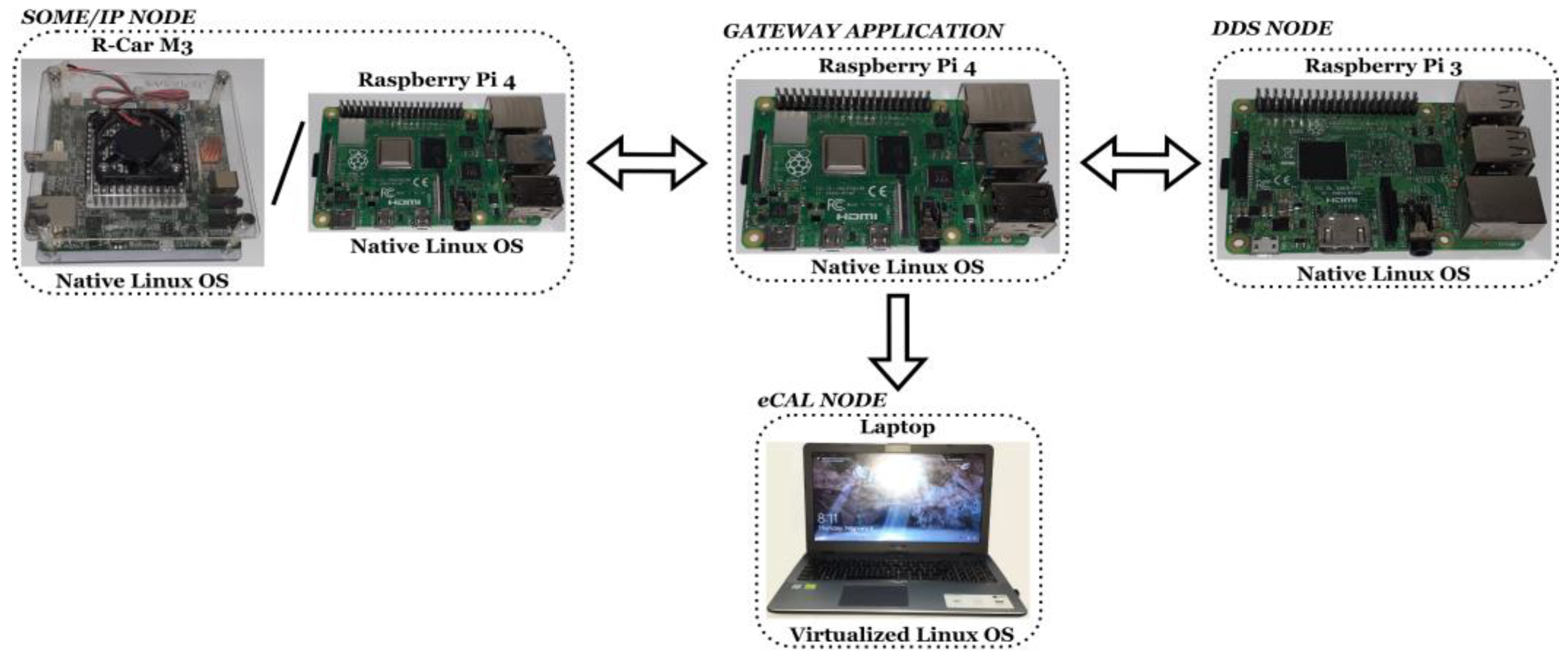
4. System Architecture
- The first device used was the R-Car M3e Automotive System-on-Chip (SoC) from Renesas, having dual ARM Cortex-A57 processors, quad ARM Cortex-A53 processors, and the ARM Cortex-R7 Dual Lockstep processor. R-CAR M3e is described as ideal for medium automotive computing systems and it is utilized in areas such as infotainment, gateway servers, integrated cockpit applications, and others. A Linux operating system with kernel version 5.10 was used on the R-Car M3e SoC, compatible with the open-source SOME/IP implementation used in the development phase.
- The second device used for the SOME/IP entities was the Raspberry Pi 4 (R-Pi 4) based on a Broadcom BCM2711 SoC with a 64-bit quad-core ARM Cortex-A72 processor, widely used in different types of applications, including IoT and communication scenarios. A Linux operating system with kernel version 5.10.63-V7l+ was used on the R-Pi 4, the final setup offering a low cost/high performance balance.
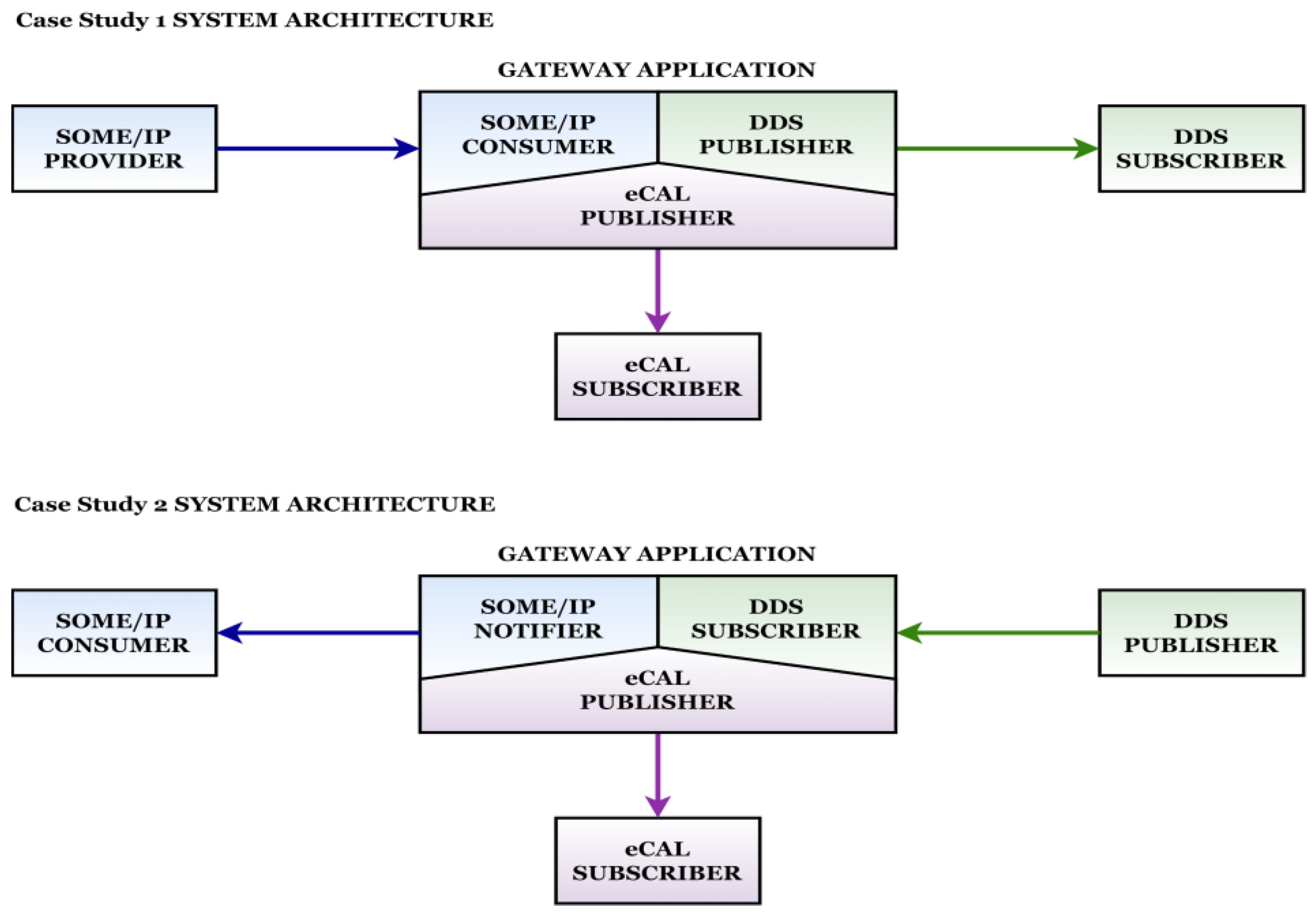
5. Case Study and Results
5.1. Case Study 1 and Case Study 2 Development
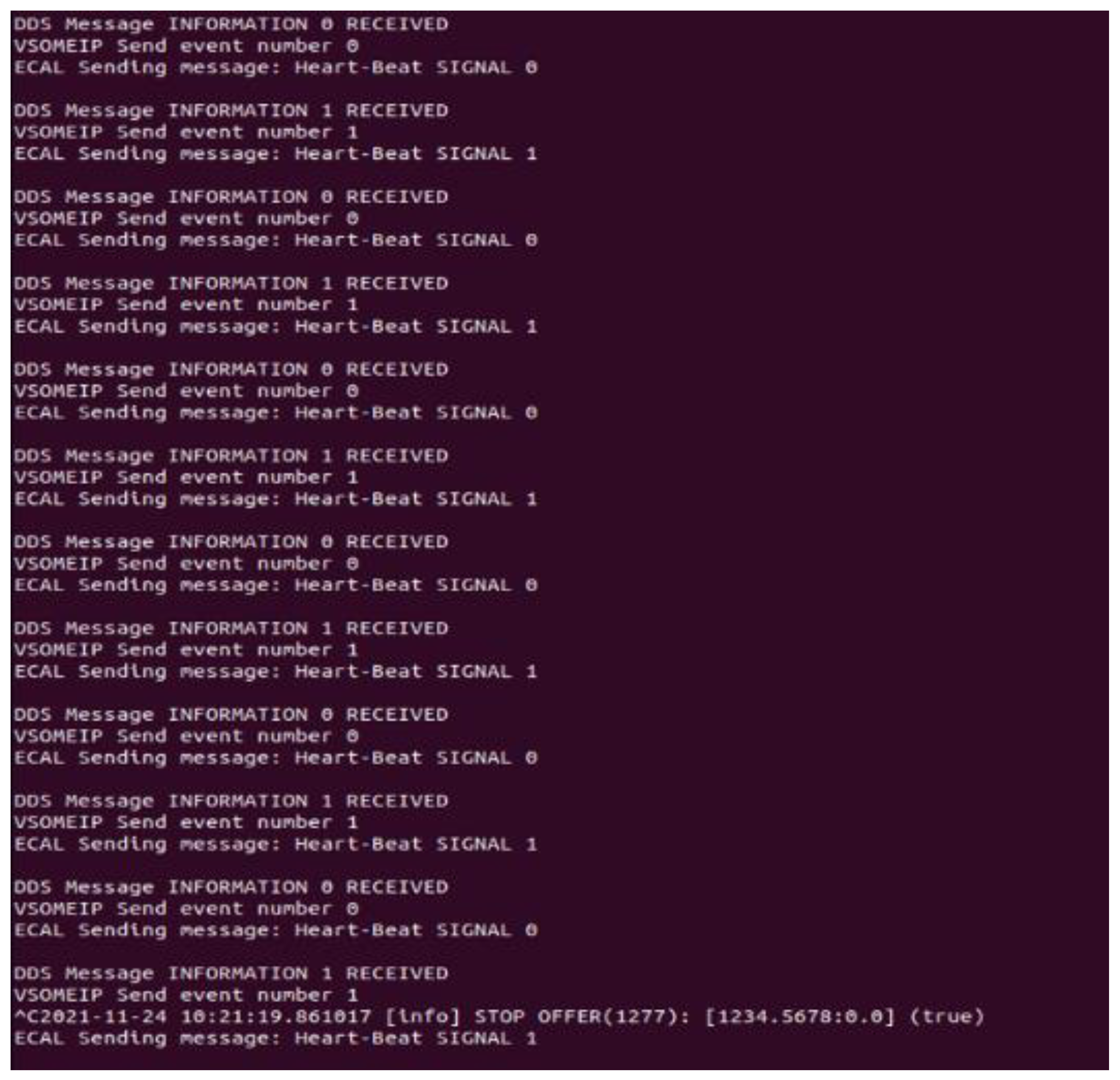
5.2. Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nicolae, A.; Korodi, A.; Silea, I. An Overview of Industry 4.0 Development Directions in the Industrial Internet of Things Context. Rom. J. Inf. Sci. Technol. 2019, 22, 183–201. [Google Scholar]
- Huang, H.; Ding, S.; Zhao, L.; Huang, H.; Chen, L.; Gao, H.; Ahmed, S.H. Real-Time Fault Detection for IIoT Facilities Using GBRBM-Based DNN. IEEE Internet Things J. 2020, 7, 5713–5722. [Google Scholar] [CrossRef]
- Nicolae, A.; Korodi, A.; Silea, I. Complete Automation of an Energy Consumption Reduction Strategy from a Water Treatment and Distribution Facility, Inside an Industrial Internet of Things-Compliant Proactive Historian Application. Sensors 2021, 21, 2569. [Google Scholar] [CrossRef] [PubMed]
- Xu, W.; Hu, J.; Chen, R.; An, Y.; Xiong, Z.; Liu, H. Keypoint-Aware Single-Stage 3D Object Detector for Autonomous Driving. Sensors 2022, 22, 1451. [Google Scholar] [CrossRef] [PubMed]
- Kalirajan, V.; Mader, R.; Kastner, S. Exploration of Real Time Behavior of Event Chains by Simulation and Measurements of “In-Vehicle Networks”. In Proceedings of the Symposium on International Automotive Technology, Pune, India, 22 September 2021. [Google Scholar]
- Ioana, A.; Korodi, A. Improving OPC UA Publish-Subscribe Mechanism over UDP with Synchronization Algorithm and Multithreading Broker Application. Sensors 2020, 20, 5591. [Google Scholar] [CrossRef] [PubMed]
- Ho, M.-H.; Yen, H.-C.; Lai, M.-Y.; Liu, Y.-T. Implementation of DDS Cloud Platform for Real-time Data Acquisition of Sensors. In Proceedings of the International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS), Hualien City, Taiwan, 16–19 November 2021. [Google Scholar]
- Iorio, M.; Reineri, M.; Risso, F.; Sisto, R.; Valenza, F. Securing SOME/IP for In-Vehicle Service Protection. IEEE Trans. Veh. Technol. 2020, 69, 13450–13466. [Google Scholar] [CrossRef]
- Iorio, M.; Buttiglieri, A.; Reineri, M.; Risso, F.; Sisto, R.; Valenza, F. Protecting In-Vehicle Services: Security-Enabled SOME/IP Middleware. IEEE Veh. Technol. Mag. 2020, 15, 77–85. [Google Scholar] [CrossRef]
- Zelle, D.; Lauser, T.; Kern, D.; Krauß, C. Analyzing and Securing SOME/IP Automotive Services with Formal and Practical Methods. In Proceedings of the 16th International Conference on Availability, Reliability and Security (ARES 2021), Vienna, Austria, 17–20 August 2021; pp. 1–20. [Google Scholar]
- Ma, B.; Yang, S.; Zuo, Z.; Zou, B.; Cao, Y.; Yan, X.; Zhou, S.; Li, J. An Authentication and Secure Communication Scheme for In-Vehicle Networks Based on SOME/IP. Sensors 2022, 22, 647. [Google Scholar] [CrossRef] [PubMed]
- Gehrmann, T.; Duplys, P. Intrusion Detection for SOME/IP: Challenges and Opportunities. In Proceedings of the 23rd Euromicro Conference on Digital System Design (DSD), Kranj, Slovenia, 26–28 August 2020; pp. 583–587. [Google Scholar]
- AUTOSAR. Specification of Communication Management; Release 19-03; AUTOSAR: Munich, Germany, 2019. [Google Scholar]
- AUTOSAR. Explanation of Adaptive Platform Design; Release 19-03; AUTOSAR: Munich, Germany, 2019. [Google Scholar]
- AUTOSAR. Explanation of Ara::com API; Release 17-03; AUTOSAR: Munich, Germany.
- Mader, R.; Winkler, G.; Reindl, T.; Pandya, N. The Car’s Electronic Architecture in Motion: The Coming Transformation. In Proceedings of the 42nd International Vienna Motor Symposium, Vienna, Austria, 28–30 April 2021. [Google Scholar]
- AUTOSAR. SOME/IP Protocol Specification; Release 19-11; AUTOSAR: Munich, Germany, 2019. [Google Scholar]
- Elbahnihy, A.; Safar, M.; El-Kharashi, M.W. Hardware-accelerated SOME/IP-based Serialization for AUTOSAR Platforms. In Proceedings of the 15th Design & Technology of Integrated Systems in Nanoscale Era (DTIS), Marrakech, Morocco, 1–3 April 2020. [Google Scholar]
- Zuo, Z.; Yang, S.; Ma, B.; Zou, B.; Cao, Y.; Li, Q.; Zhou, S.; Li, J. Design of a CANFD to SOME/IP Gateway Considering Security for In-Vehicle Networks. Sensors 2021, 21, 7917. [Google Scholar] [CrossRef] [PubMed]
- Bhat, A.; Samii, S.; Rajkumar, R.R. Fault-Tolerance Support for Adaptive AUTOSAR Platforms using SOME/IP. In Proceedings of the IEEE 26th International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA), Gangnueng, Korea, 19–21 August 2020; pp. 1–6. [Google Scholar]
- Ioana, A.; Korodi, A. VSOMEIP—OPC UA Gateway Solution for the Automotive Industry. 2019 IEEE International Conference on Engineering, Technology and Innovation (ICE/ITMC), Hangzhou, China, 18–21 August 2019; pp. 1–6. [Google Scholar]
- Ioana, A.; Korodi, A. OPC UA Publish-Subscribe and VSOME/IP Notify-Subscribe Based Gateway Application in the Context of Car to Infrastructure Communication. Sensors 2020, 20, 4624. [Google Scholar] [CrossRef] [PubMed]
- Arestova, A.; Martin, M.; Hielscher, K.S.J.; German, R. A Service-Oriented Real-Time Communication Scheme for AUTOSAR Adaptive Using OPC UA and Time-Sensitive Networking. Sensors 2021, 21, 2337. [Google Scholar] [CrossRef] [PubMed]
- Hackel, T.; Schmidt, A.; Meyer, P.; Korf, F.; Schmidt, T.C. Strategies for Integrating Control Flows in Software-Defined In-Vehicle Networks and Their Impact on Network Security. In Proceedings of the 2020 IEEE Vehicular Networking Conference (VNC), New York, NY, USA, 16–18 December 2020; pp. 1–8. [Google Scholar]
- ICS Advisory (ICSA-21-315-02) Multiple Data Distribution Service (DDS) Implementations (Update A). Available online: https://www.cisa.gov/uscert/ics/advisories/icsa-21-315-02 (accessed on 22 January 2022).
- Kim, H.; Kim, D.K.; Alaerjan, A. ABAC-Based Security Model for DDS. IEEE Trans. Dependable Secur. Comput. 2021. [Google Scholar] [CrossRef]
- Cho, D.-S.; Yun, S.; Kim, H.; Kwon, J.; Kim, W.-T. Autonomous Driving System Verification Framework with FMI Co-Simulation based on OMG DDS. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 4–6 January 2020; pp. 1–6. [Google Scholar]
- Bijlsma, T.; Buriachevskyi, A.; Frigerio, A.; Fu, Y.; Goossens, K.; Ors, A.O.; van der Perk, P.J.; Terechko, A.; Vermeulen, B. A Distributed Safety Mechanism using Middleware and Hypervisors for Autonomous Vehicles. In Proceedings of the Design, Automation & Test in Europe Conference & Exhibition (DATE), Grenoble, France, 9–13 March 2020; pp. 1175–1180. [Google Scholar]
- El-Ferik, S.; Almadani, B.; Elkhider, S.M. Formation Control of Multi Unmanned Aerial Vehicle Systems Based on DDS Middleware. IEEE Access 2020, 8, 44211–44218. [Google Scholar] [CrossRef]
- Dehnavi, S.; Goswami, D.; Koedam, M.; Nelson, A.; Goossens, K. Modeling, implementation, and analysis of XRCE-DDS applications in distributed multi-processor real-time embedded systems. In Proceedings of the Design, Automation & Test in Europe Conf. & Exhibition (DATE), Grenoble, France, 1–5 February 2021; pp. 1148–1151. [Google Scholar]
- Jienan, D.; Xiangning, C.; Shuai, C. Overview of Application Layer Protocol of Internet of Things. In Proceedings of the 2021 IEEE 6th Int. Conf. on Computer and Communication Systems (ICCCS), Chengdu, China, 23–26 April 2021; pp. 922–926. [Google Scholar]
- Thulasiraman, P.; Chen, Z.; Allen, B.; Bingham, B. Evaluation of the Robot Operating System 2 in Lossy Unmanned Networks. In Proceedings of the IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24–27 August 2020; pp. 1–8. [Google Scholar]
- Fernandez, J.; Allen, B.; Thulasiraman, P.; Bingham, B. Performance Study of the Robot Operating System 2 with QoS and Cyber Security Settings. In Proceedings of the IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24–27 August 2020; pp. 1–6. [Google Scholar]
- Jeong, S.; Ga, T.; Jeong, I.; Choi, J. Behavior tree driven multi-mobile robots via data distribution service (DDS). In Proceedings of the 21st International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 12–15 October 2021; pp. 1633–1638. [Google Scholar]
- Sudhakaran, S.; Mageshkumar, V.; Baxi, A.; Cavalcanti, D. Enabling QoS for Collaborative Robotics Applications with Wireless TSN. In Proceedings of the IEEE Int. Conf. on Comm. Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Profanter, S.; Tekat, A.; Dorofeev, K.; Rickert, M.; Knoll, A. OPC UA versus ROS, DDS, and MQTT: Performance Evaluation of Industry 4.0 Protocols. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Melbourne, Australia, 13–15 February 2019; pp. 955–962. [Google Scholar]
- Sim, W.; Song, B.; Shin, J.; Kim, T. Data Distribution Service Converter Based on the Open Platform Communications Unified Architecture Publish–Subscribe Protocol. Electronics 2021, 10, 2524. [Google Scholar] [CrossRef]
- Endeley, R.; Fleming, T.; Jin, N.; Fehringer, G.; Cammish, S. A Smart Gateway Enabling OPC UA and DDS Interoperability. In Proceedings of the IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computing, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation, Leicester, UK, 19–23 August 2019; pp. 88–93. [Google Scholar]
- Ioana, A.; Korodi, A. DDS and OPC UA Protocol Coexistence Solution in Real-Time and Industry 4.0 Context Using Non-Ideal Infrastructure. Sensors 2021, 21, 7760. [Google Scholar] [CrossRef] [PubMed]
- Chan, T.K.; Chin, C.S. Review of Autonomous Intelligent Vehicles for Urban Driving and Parking. Electronics 2021, 10, 1021. [Google Scholar] [CrossRef]
- Twahirwa, E.; Rwigema, J.; Datta, R. Design and Deployment of Vehicular Internet of Things for Smart City Applications. Sustainability 2022, 14, 176. [Google Scholar] [CrossRef]
- Tyagi, A.K.; Aswathy, S.U. Autonomous Intelligent Vehicles (AIV): Research statements, open issues, challenges and road for future. Int. J. Intell. Netw. 2021, 2, 83–102. [Google Scholar] [CrossRef]
- Available online: https://github.com/COVESA/vsomeip (accessed on 22 November 2021).
- Available online: https://raw.githubusercontent.com/eProsima/Fast-DDS/master/fastrtps.repos (accessed on 22 November 2021).
- Available online: https://github.com/continental/ecal (accessed on 22 November 2021).
- Available online: https://www.yoctoproject.org/ (accessed on 22 November 2021).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Protocol | Advantages | Disadvantages |
|---|---|---|
| SOME/IP |
|
|
| DDS |
|
|
| eCAL |
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ioana, A.; Korodi, A.; Silea, I. Automotive IoT Ethernet-Based Communication Technologies Applied in a V2X Context via a Multi-Protocol Gateway. Sensors 2022, 22, 6382. https://doi.org/10.3390/s22176382
Ioana A, Korodi A, Silea I. Automotive IoT Ethernet-Based Communication Technologies Applied in a V2X Context via a Multi-Protocol Gateway. Sensors. 2022; 22(17):6382. https://doi.org/10.3390/s22176382
Chicago/Turabian StyleIoana, Alexandru, Adrian Korodi, and Ioan Silea. 2022. "Automotive IoT Ethernet-Based Communication Technologies Applied in a V2X Context via a Multi-Protocol Gateway" Sensors 22, no. 17: 6382. https://doi.org/10.3390/s22176382
APA StyleIoana, A., Korodi, A., & Silea, I. (2022). Automotive IoT Ethernet-Based Communication Technologies Applied in a V2X Context via a Multi-Protocol Gateway. Sensors, 22(17), 6382. https://doi.org/10.3390/s22176382