
Research on Data Security Communication Scheme of Heterogeneous Swarm Robotics System in Emergency Scenarios


Abstract
:1. Introduction
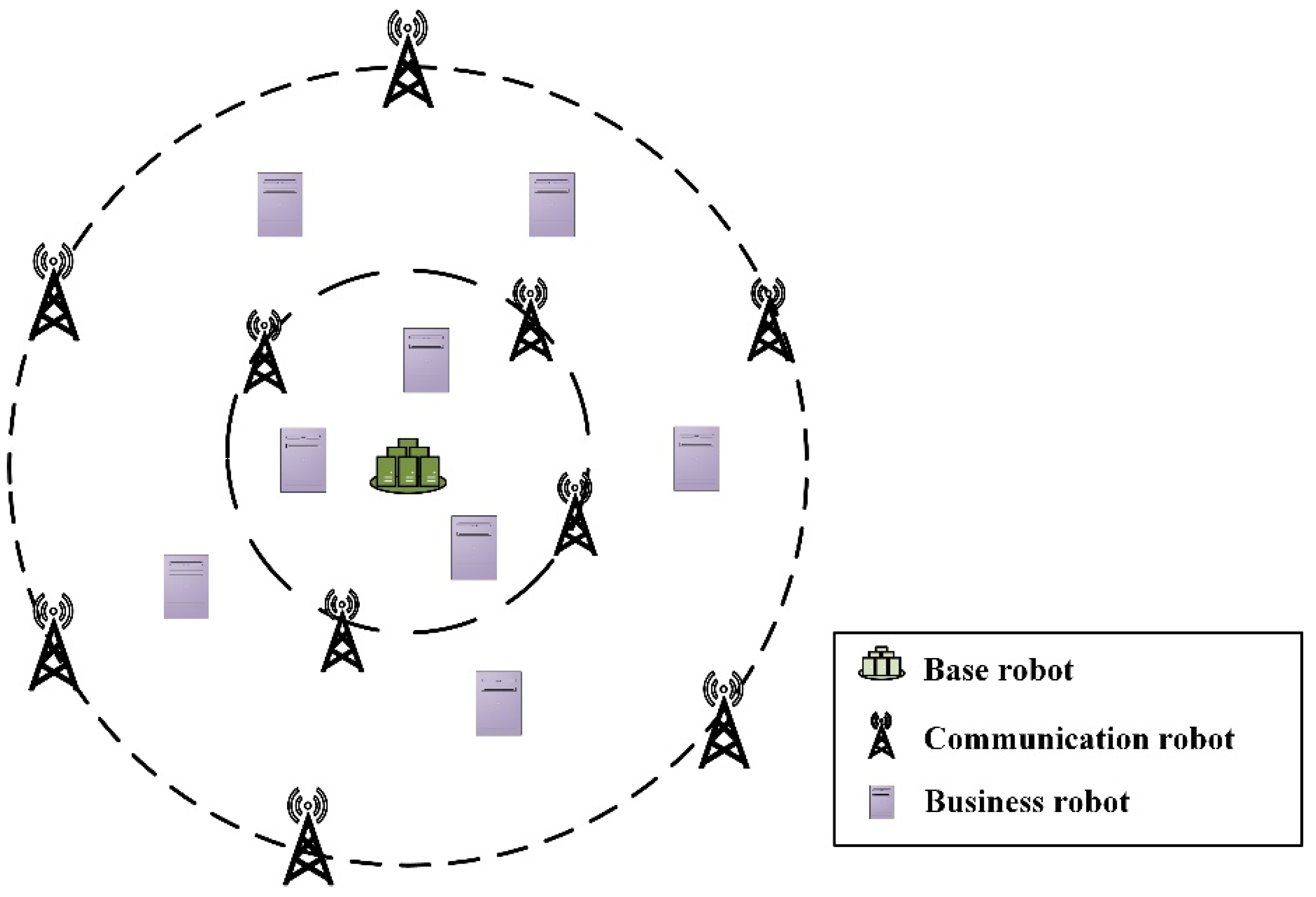
- We proposed a decentralized network topology model, which is mainly composed of base robot, communication robots, and business robots. The decentralized control model is adopted to ensure the stability of rescue support system.
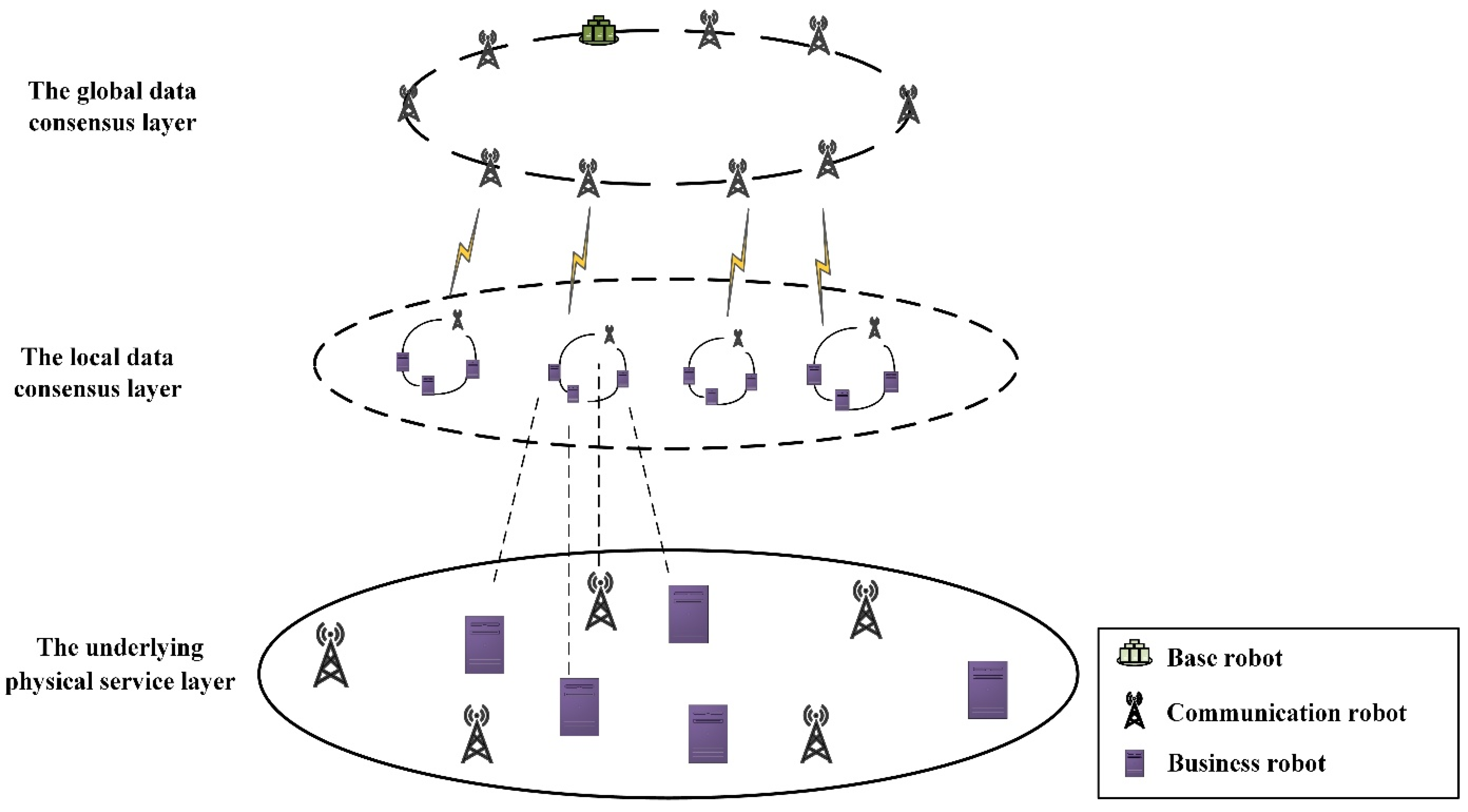
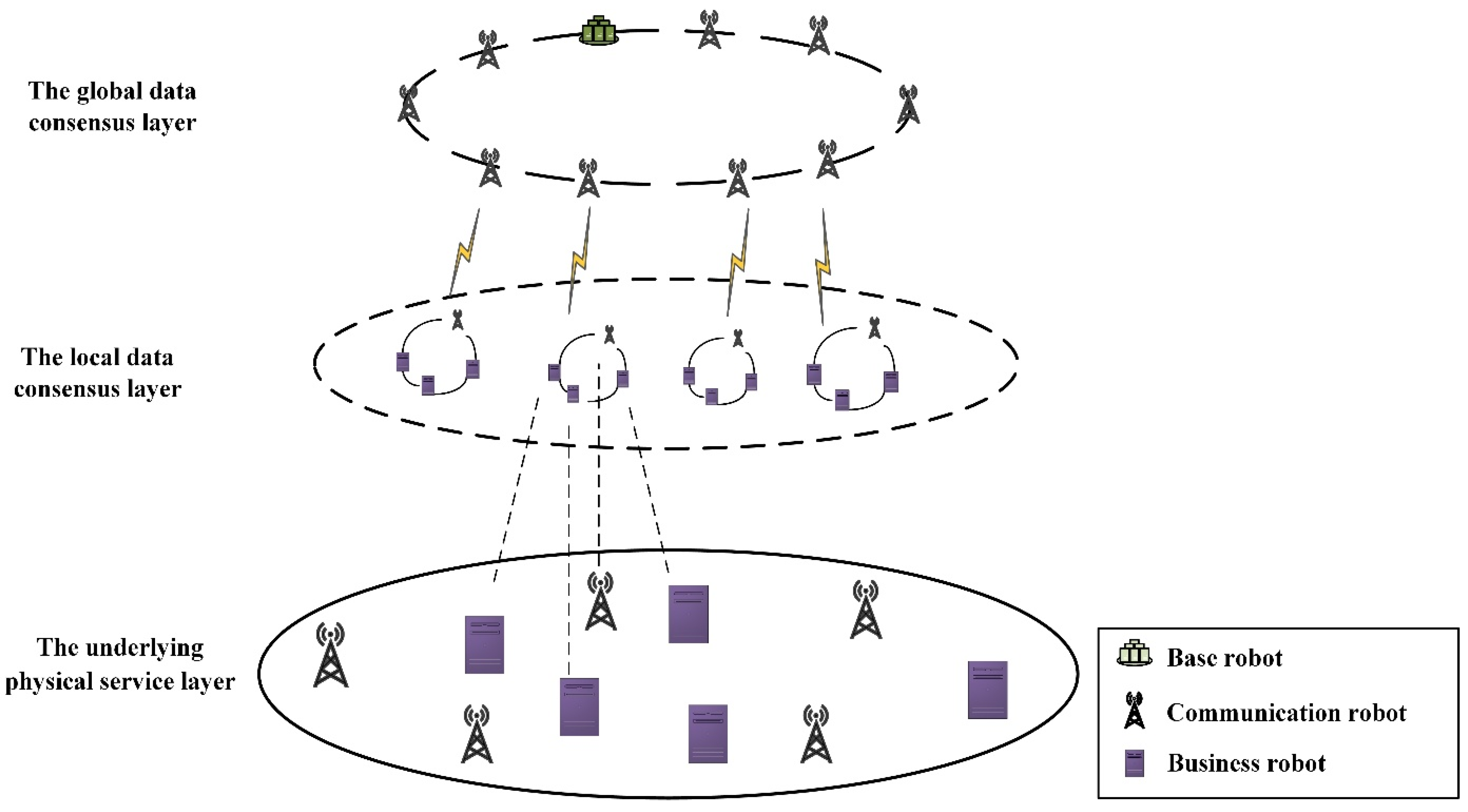
- We designed a data storage model based on the master–slave chains. This model divides the network into different slave chains according to different types of business robots. The slave chains mainly reach the consensus of local data; the data abstracts stored in all slave chains are uploaded to the master chain composed of base robot and communication robots to reach a system global consensus. This model adopts the Delegated Proof of Stake (DPoS) consensus mechanism to complete the consensus task of robot data so that the system can guarantee the consistency of data without a central node.
- We provided an implementation framework for the data communication scheme based on the main side chain and verified the scheme from the aspects of delay, throughput, and fault tolerance. The simulation results show that the performance of the data communication scheme based on the master–slave chains method is obviously better than that of the data communication scheme based on the single-blockchain method, and the scheme also has higher fault tolerance.
2. Background
2.1. Heterogeneous Swarm Robotics Network Topology
2.2. Problem Description
- Due to the complex and changeable environment in the variable area, in order to ensure the function and stability of the system, the mobility and autonomy of the heterogeneous swarm robots lead to the complex network structure of the system and the unstable communication channel. The heterogeneous swarm robots use wireless communication for data interaction, and the robots are prone to data missing or errors during the communication process, which affects the normal operation of the system.
- The heterogeneous swarm robots system is based on a centralized data storage architecture, that is, the data collected by the business robot is uploaded to the base robot directly or through the communication robot for data storage. However, the swarm robots in this system have autonomy and swarm behavior control. After the whole system is completed, the control right in the system belongs to the robot itself, and the emergency rescue environment is uncontrollable, and its complex and changeable geographical environment can easily affect the normal operation of swarm robots to varying degrees. Thus, once a robot node fails, the entire heterogeneous swarm robotics system will be paralyzed.
- To this end, we describe the problem in the heterogeneous swarm robot system as a Byzantine generals problem [16]. There are N robots in the heterogeneous swarm robotics, assuming the following conditions:
- ○
- Treat the normally operating robots in the system as loyal generals and complete their own tasks in accordance with the rules defined by the system;
- ○
- The faulty robot in the system is regarded as a traitorous general, that is, the robot node fails or is attacked in the process of completing the task;
- ○
- The N robots in the system communicate with each other.
3. Related Work
4. System Model
4.1. Decentralized Heterogeneous Swarm Robotics Data Security Communication Model
4.2. Decentralized Heterogeneous Swarm Robotics Network Model
4.3. Data Storage Model of Heterogeneous Swarm Robotics Using the Master–Slave Blockchain
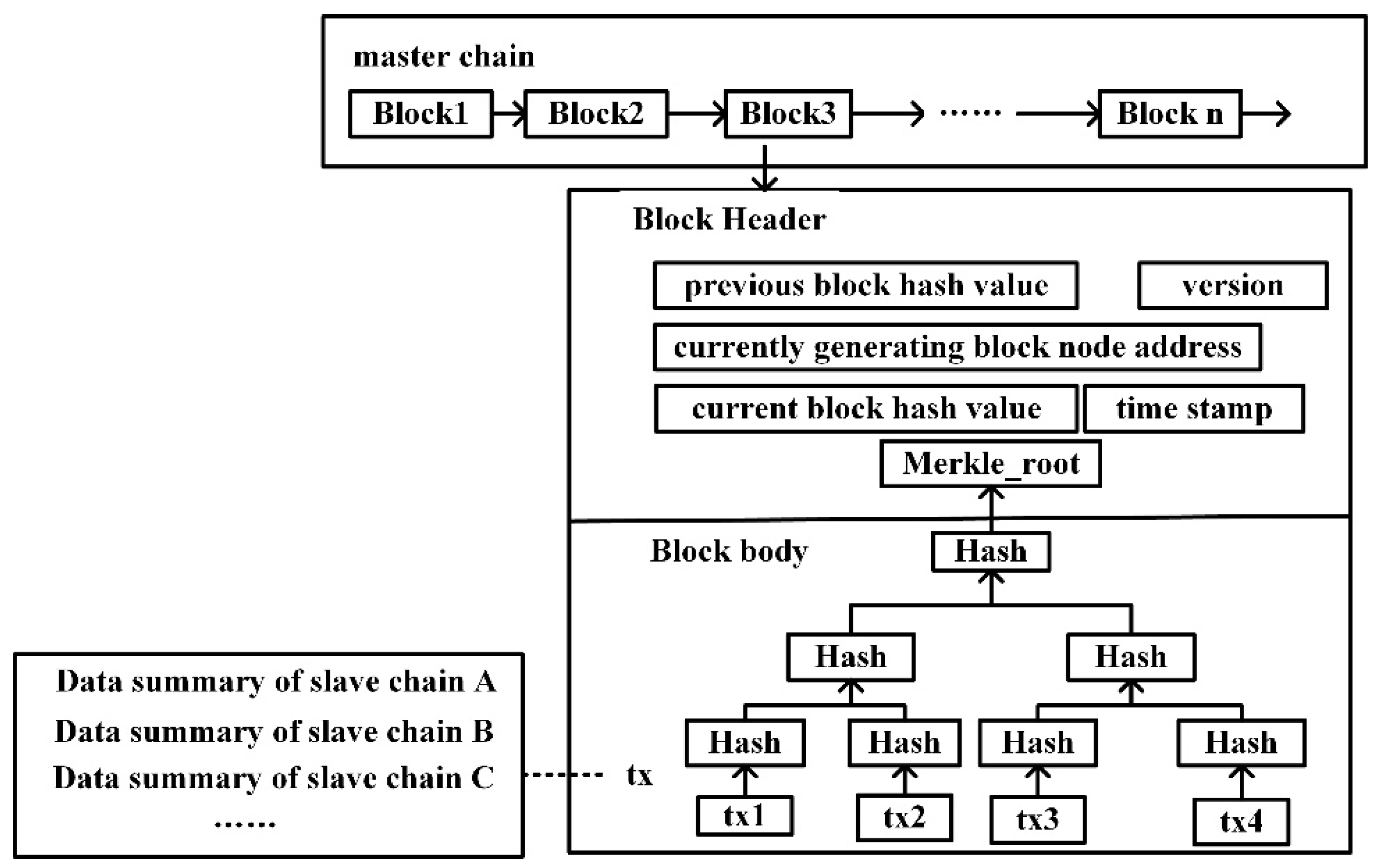
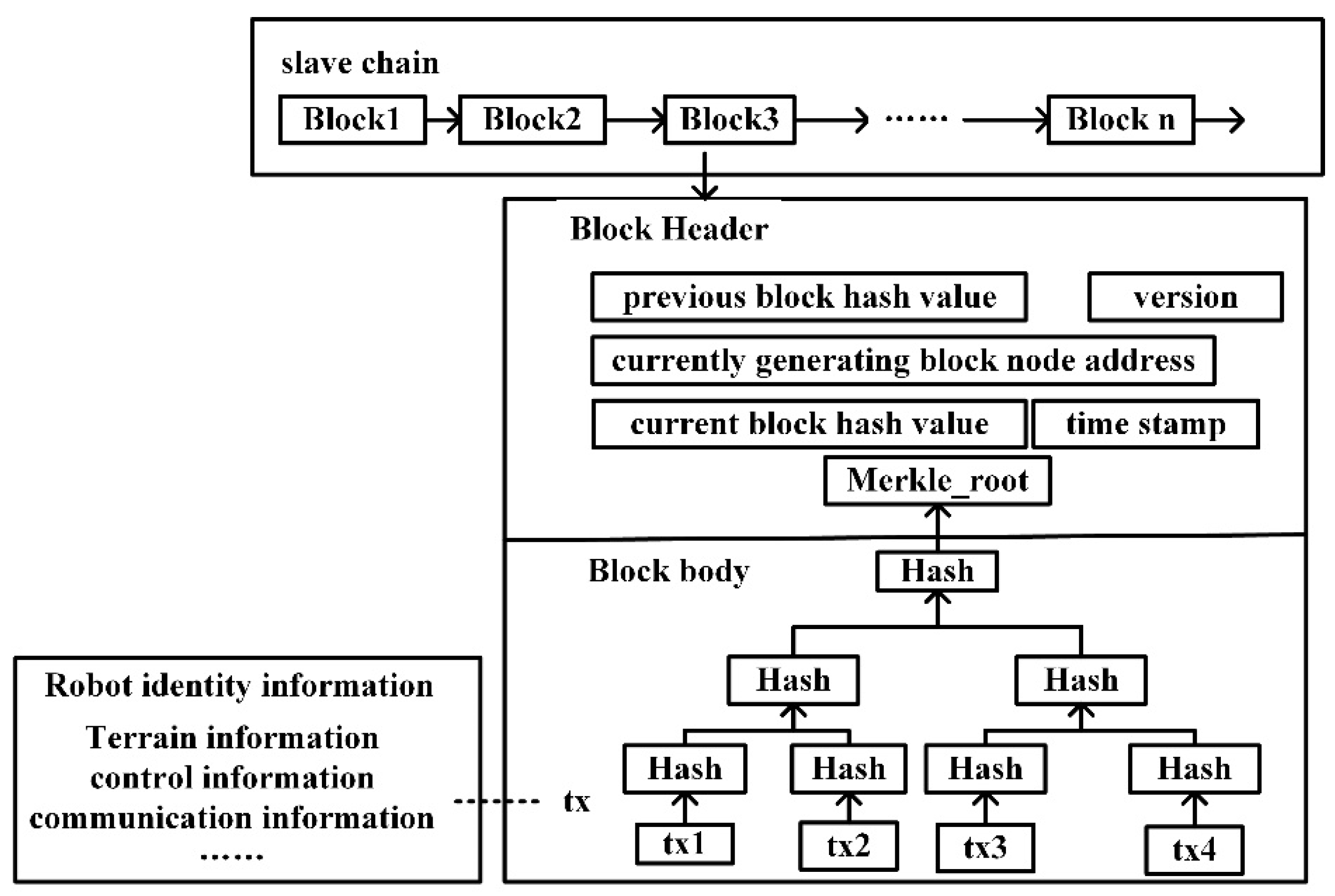
4.3.1. Design of the Master–Slave Blockchain’s Block
The Data Structure of the Slave Chains Block
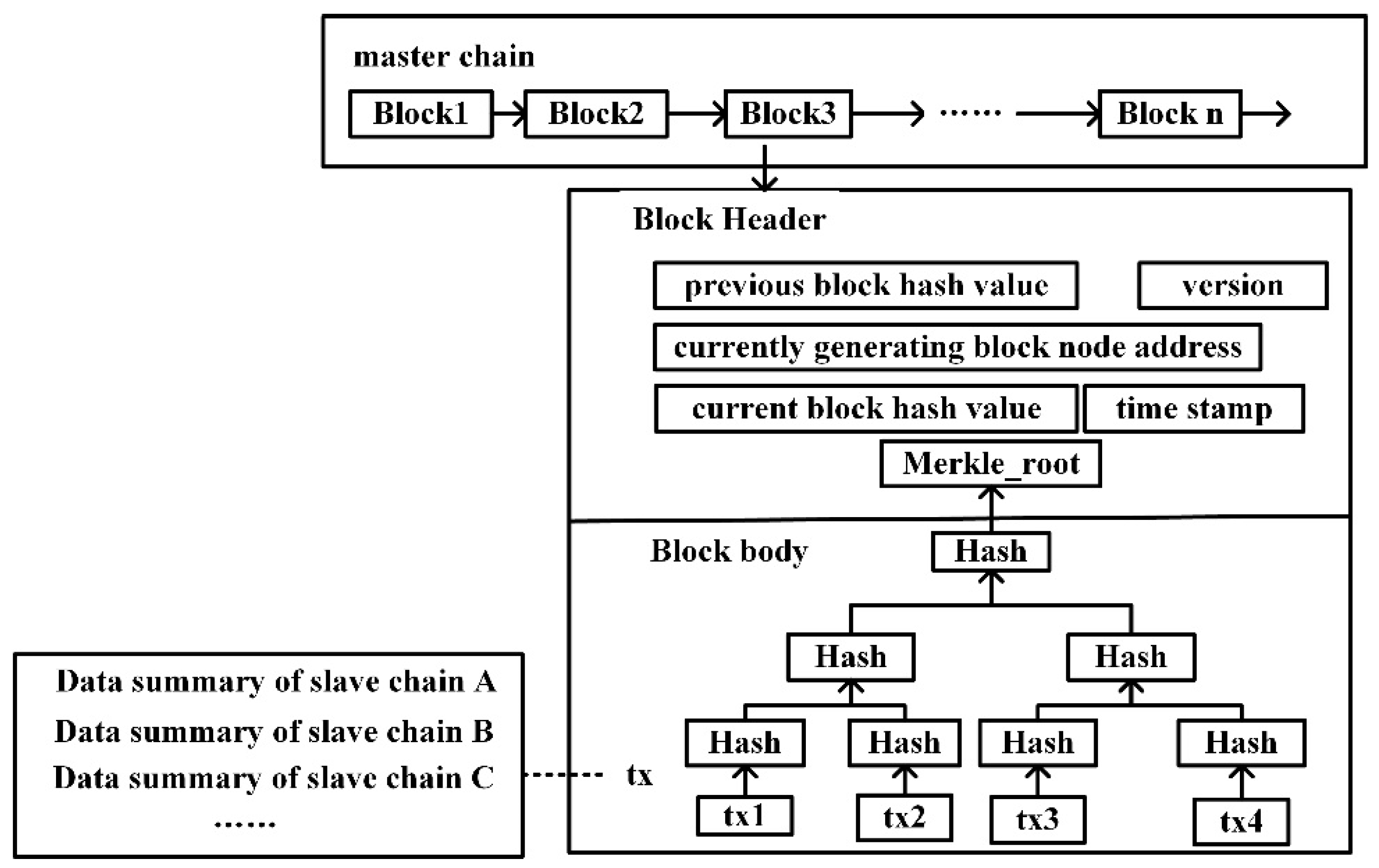
The Data Structure of the Master Chain Block
4.3.2. Consensus Mechanism Based on Master–Slave Blockchain Data Storage
Node Type
Proxy Node Election Mechanism
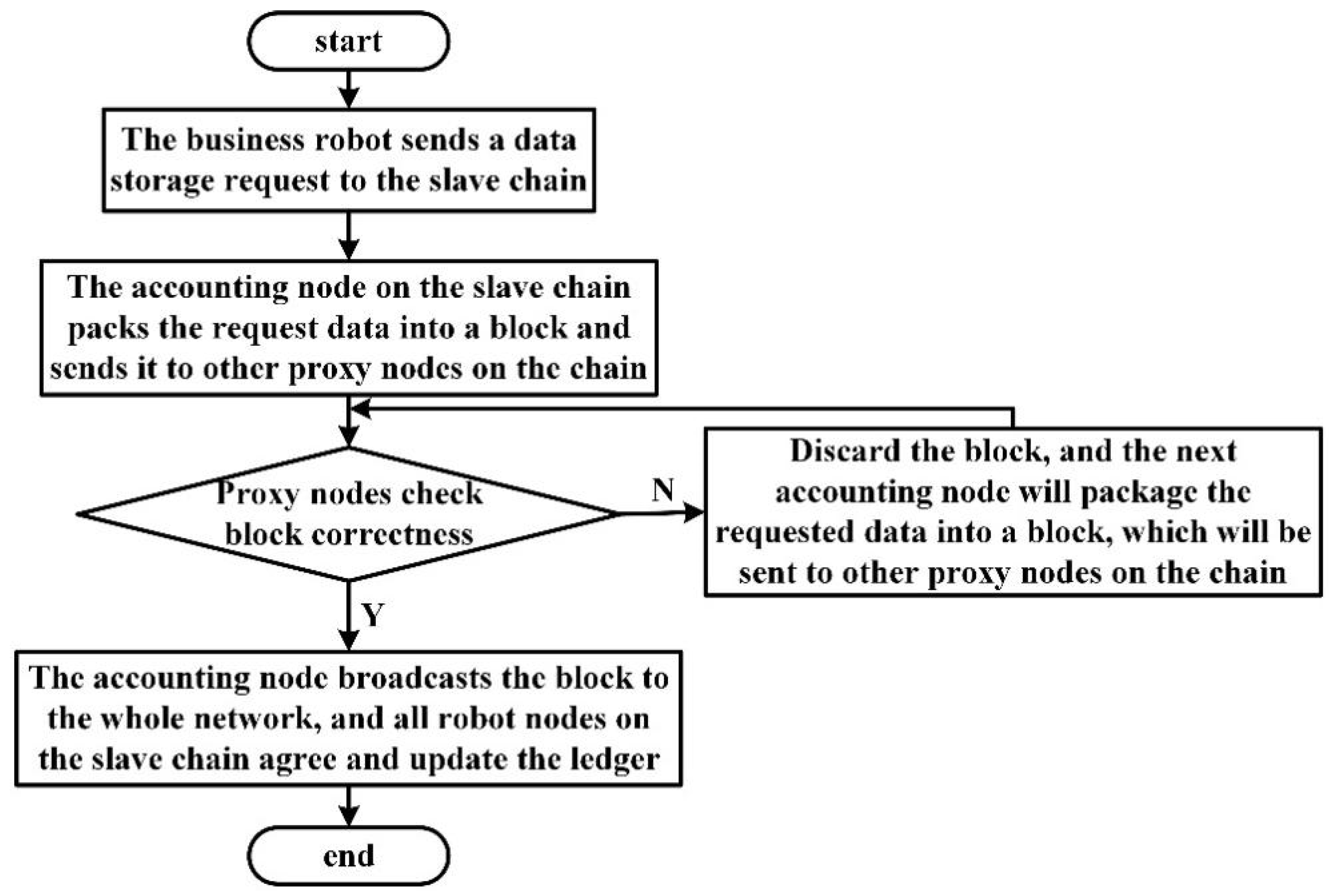
Proxy Nodes Produce Blocks
Block Verification
| Algorithm 1 DPoS consensus algorithm based on master–slave blockchain data storage |
| Input: Common node set , candidate node set |
| Output: Datastore success or datastore failure |
| 1. Common nodes and candidate nodes select the proxy node set by voting |
| 2. |
| 3. package block information |
| 4. broadcast message(block, blockMessage) |
| 5. Other proxy nodes verify blocks |
| 6. If the block verification is passed and the cumulative number of verification passes is 2N/3 |
| 7. Message broadcast by node and add the block to the slave blockchain |
| 8. Else |
| 9. Data storage failure message broadcast by the node |
| 10. end if |
5. Evaluation
5.1. Performance Analysis of the System
5.2. Fault Tolerance Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khalil, A.Y.; Modjtaba, R. Swarm intelligence based robotic search in unknown maze-like environments. Expert Syst. Appl. 2021, 178, 114907. [Google Scholar]
- Cai, L.; Espinosa, A.P.; Pranantha, D.; Gloria, A.D. Multi-robot search and rescue team. In Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011; pp. 296–301. [Google Scholar]
- Dorigo, M.; Theraulaz, G.; Trianni, V. Swarm Robotics: Past, Present, and Future. Proc. IEEE 2021, 109, 1152–1165. [Google Scholar] [CrossRef]
- Cao, Y.; Yu, W.; Ren, W.; Chen, G. An Overview of Recent Progress in the Study of Distributed Multi-Agent Coordination, in IEEE Transactions on Industrial Informatics. IEEE Trans. Ind. Inform. 2013, 9, 427–438. [Google Scholar] [CrossRef]
- Merkel, H. Self-Organizing Node and a Sensor Network with Self-Organizing Nodes. U.S. Patent No. EP3824316A1, 26 May 2021. [Google Scholar]
- Chen, W.; Liu, B.; Huang, H.; Zheng, Z. When UAV Swarm Meets Edge-Cloud Computing: The QoS Perspective. IEEE Netw. 2019, 33, 36–43. [Google Scholar] [CrossRef]
- Datta, S.K.; Dugelay, J.L.; Bonnet, C. IoT Based UAV Platform for Emergency Services. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence, Jeju, Korea, 17–19 October 2018; pp. 144–147. [Google Scholar] [CrossRef]
- Nakamoto, S. Bitcoin: A peer-to-peer electronic cash system. Decentralized Bus. Rev. 2008. Available online: https://bitcoin.org/bitcoin.pdf (accessed on 21 July 2022).
- Li, X.; Jiang, P.; Chen, T.; Luo, X.P.; Wen, Q.Y. A survey on the security of blockchain system. Future Gener. Comput. Syst. 2020, 107, 841–853. [Google Scholar] [CrossRef]
- Kaur, S.; Chaturvedi, S.; Sharma, A.; Kar, J. A Research Survey on Applications of Consensus Protocols in Blockchain. Secur. Commun. Netw. 2021, 2021, 6693731. [Google Scholar] [CrossRef]
- Abhi, A.I.; Shin, S.Y. BUS: A Blockchain-Enabled Data Acquisition Scheme with the Assistance of UAV Swarm in Internet of Things. IEEE Access 2019, 7, 103231–103249. [Google Scholar] [CrossRef]
- Kapitonov, A.; Lonshakov, S.; Krupenkin, A.; Berman, I. Blockchain-based protocol of autonomous business activity for multi-agent system consisting of UAVs. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial System (RED-UAS), Linkoping, Sweden, 3–5 October 2017; pp. 84–89. [Google Scholar] [CrossRef]
- Strobel, V.; Eduardo, C.F.; Dorigo, M. Managing Byzantine robotics via Blockchain Technology in a Swarm Robotics Collective Decision Making Scenario. In Proceedings of the 17th International Conference on Autonomous Agents and MultiAgent System (AAMAS ‘18), Stockholm, Sweden, 10–15 July 2018; pp. 541–549. [Google Scholar]
- Grinewitschus, L.; Almujahed, H.; Fresia, M.; Bruck, G.; Jung, P. Large device to device communication network including airborne drones for emergency scenarios. Trans. Emerg. Telecommun. Technol. 2021, 32, e4295. [Google Scholar] [CrossRef]
- Tihanyi, D.; Lu, Y.; Karaca, O.; Kamgarpour, M. Multi-robot task allocation for safe planning against stochastic hazard dynamics. arXiv 2021, arXiv:2103.01840. [Google Scholar]
- Litsas, C.; Pagourtzis, A.T.; Sakavalas, D. The Byzantine Generals Problem in Generic and Wireless Networks. In Applications of Mathematics and Informatics in Science and Engineering, 127th ed.; Springer: Cham, Switzerland, 2014; pp. 405–415. [Google Scholar]
- Zheng, Z.; Xie, S.; Dai, H.; Chen, X.; Wang, H. An overview of blockchain technology: Architecture, consensus, and future trends. In Proceedings of the 2017 IEEE International Congress on Big Data (BigData Congress), Honolulu, HI, USA, 25–30 June 2017; pp. 557–564. [Google Scholar]
- Vahidalizadehdizaj, M.; Jadav, J.; Tao, L. Security challenges in swarm intelligence. In Proceedings of the 2015 6th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Dallas-Fortworth, TX, USA, 13–15 July 2015; pp. 1–4. [Google Scholar]
- Higgins, F.; Tomlinson, A.; Martin, K.M. Survey on Security Challenges for Swarm Robotics. In Proceedings of the 2009 5th International Conference on Autonomic and Autonomous System, Valencia, Spain, 20–25 April 2009; pp. 307–312. [Google Scholar]
- Roy, S.; Vo, T.; Hernandez, S.; Lehrmann, A.; Ali, A.; Kalafatis, S. IoT Security and Computation Management on a Multi-Robot System for Rescue Operations Based on a Cloud Framework. Sensors 2022, 22, 5569. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Wang, D. Adaptive Traffic Signal Control Mechanism for Intelligent Transportation Based on a Consortium Blockchain. IEEE Access 2019, 7, 97281–97295. [Google Scholar] [CrossRef]
- Xie, L.; Ding, Y.; Yang, H.; Wang, X.M. Blockchain-Based Secure and Trustworthy Internet of Things in SDN-Enabled 5G-VANETs. IEEE Access 2019, 7, 56656–56666. [Google Scholar] [CrossRef]
- Lu, Y.X.; Huang, K.; Zhang, S.; Zhang, Y. Blockchain Empowered Asynchronous Federated Learning for Secure Data Sharing in Internet of Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 4298–4311. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhong, Y.; Ge, X. IIoT Data Sharing Based on Blockchain: A Multileader Multifollower Stackelberg Game Approach. IEEE Internet Things J. 2022, 9, 4396–4410. [Google Scholar] [CrossRef]
- Wan, S.; Li, M.; Liu, G.; Wang, C. Recent advances in consensus protocols for blockchain: A survey. Wirel. Netw. 2020, 26, 5579–5593. [Google Scholar] [CrossRef]
- Queralta, J.P.; Westerlund, T. Blockchain-Powered Collaboration in Heterogeneous Swarms of robotics. arXiv 2019, arXiv:1912.01711. [Google Scholar]
- Singh, P.K.; Singh, R.; Nandi, S.K.; Ghafoor, K.Z.; Rawat, D.B.; Nandi, S. An efficient blockchain-based approach for cooperative decision making in swarm robotics. Internet Technol. Lett. 2020, 3, e140. [Google Scholar] [CrossRef]
- Pacheco, A.; Strobel, V.; Dorigo, M. A Blockchain-Controlled Physical Robot Swarm Communicating via an Ad-Hoc Network. In International Conference on Swarm Intelligence; ANTS 2020. Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2020; Volume 12421. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, G.; Wang, X.; Yixing, L.; Bingchuan, C. MDP-Based Quantitative Analysis Framework for Proof of Authority. In Proceedings of the 2019 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery (CyberC), Guilin, China, 17–19 October 2019. [Google Scholar]
- Alsamhi, S.H.; Lee, B.; Guizani, M.; Qiao, Y.; Liu, X. Blockchain for decentralized multi-drone to combat COVID-19 and future pandemics: Framework and proposed solutions. Trans. Emerg. Telecommun. Technol. 2021, 32, e4255. [Google Scholar] [CrossRef]
- Jiang, L.S.; Xie, S.; Maharjan, S.; Zhang, Y. Blockchain empowered wireless power transfer for green and secure Internet of Things. IEEE Netw. 2019, 33, 164–171. [Google Scholar] [CrossRef]
- Sankar, L.S.; Sindhu, M.; Sethumadhavan, M. Survey of consensus protocols on blockchain applications. In Proceedings of the 2017 4th International Conference on Advanced Computing and Communication System (ICACCS), Coimbatore, India, 6–7 January 2017; pp. 1–5. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Explain |
|---|---|
| internet request | |
| nonce | |
| certificate of authorization | |
| robot private key | |
| robot public key |
| Constitute | Explain |
|---|---|
| Version | version number |
| Height | block height |
| Timestamp | timestamp |
| Previous Block Hash | slave chains previous block hash |
| Merkle Root | The hash of the Merkle root in the slave chains blockchain |
| Operating System | Linux | Ubuntu18.04.6 LTS |
|---|---|---|
| Hardware Configuration | kernel | Kernel 4.15.0-161-generic |
| CPU | Intel(R) Xeon(R) CPU E5-2620 v4 @ 2.10 GHz | |
| hard disk | 3.7 T | |
| Memory | 16 G | |
| Software configuration | Docker | 20.10.17 |
| GCC | 7.5.0 | |
| Ethereum | 1.7.4 | |
| Golang | 1.17.11 |
| Experimental Group Configuration | Group 1 | Group 2 |
|---|---|---|
| consensus algorithm | DPoS/DPoS | DPoS |
| system model | Master–slave chains | single chain |
| number of main chain nodes | 10 | - |
| number of slave chains nodes | 2/10 | - |
| total number of nodes | 20 | 20 |
| Experimental Group Configuration | Group 1 | Group 2 | Group 3 |
|---|---|---|---|
| number of main chain nodes | 20 | 20 | 20 |
| number of slave chains | 1 | 2 | 5 |
| number of slave chains nodes | 20 | 10 | 4 |
| total number of nodes | 40 | 40 | 40 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Shao, Y. Research on Data Security Communication Scheme of Heterogeneous Swarm Robotics System in Emergency Scenarios. Sensors 2022, 22, 6082. https://doi.org/10.3390/s22166082
Sun Y, Shao Y. Research on Data Security Communication Scheme of Heterogeneous Swarm Robotics System in Emergency Scenarios. Sensors. 2022; 22(16):6082. https://doi.org/10.3390/s22166082
Chicago/Turabian StyleSun, Yi, and Ying Shao. 2022. "Research on Data Security Communication Scheme of Heterogeneous Swarm Robotics System in Emergency Scenarios" Sensors 22, no. 16: 6082. https://doi.org/10.3390/s22166082
APA StyleSun, Y., & Shao, Y. (2022). Research on Data Security Communication Scheme of Heterogeneous Swarm Robotics System in Emergency Scenarios. Sensors, 22(16), 6082. https://doi.org/10.3390/s22166082