
Electrical Optimization Method Based on a Novel Arrangement of the Magnetic Navigation System with Gradient and Uniform Saddle Coils


Abstract
1. Introduction
2. Novel Arrangement of the MNS
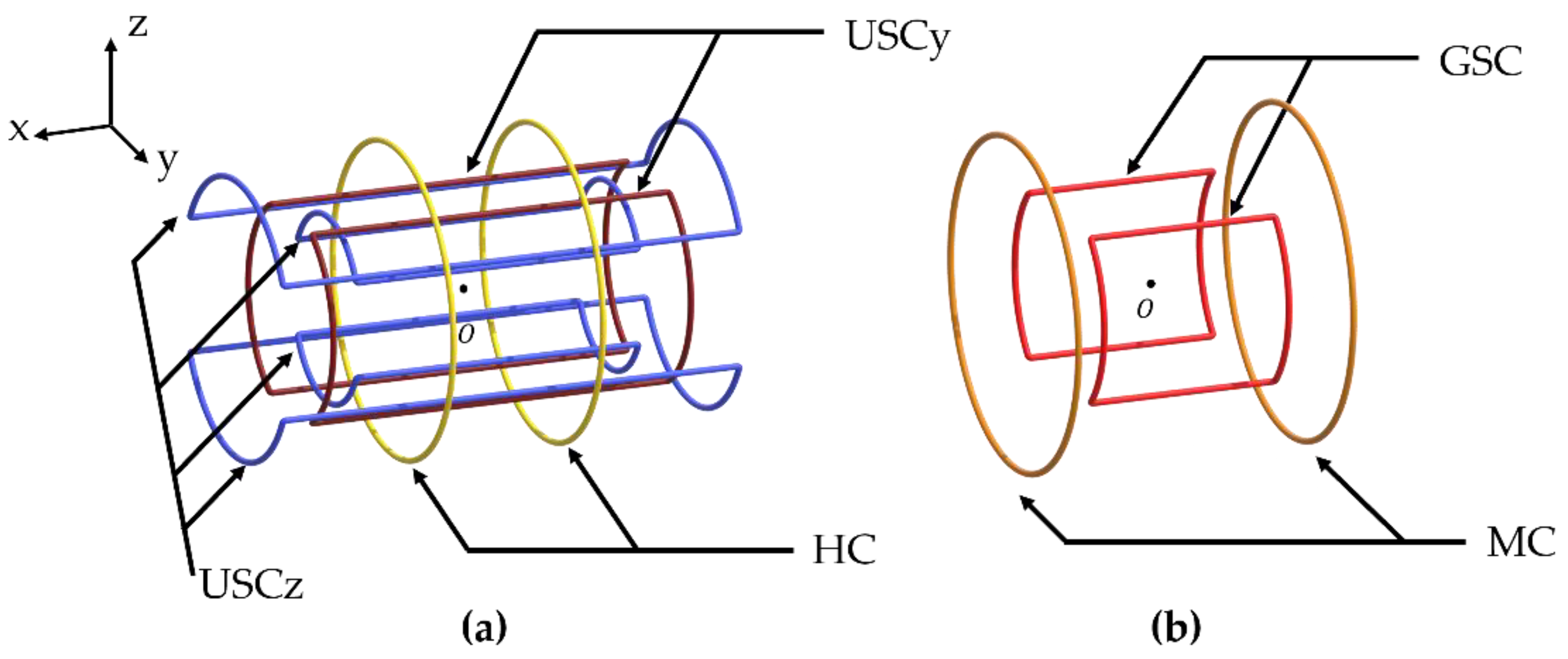
2.1. Magnetic Field and Field Gradient Generated by Each Pair of Coils
2.2. Frame of the MNS
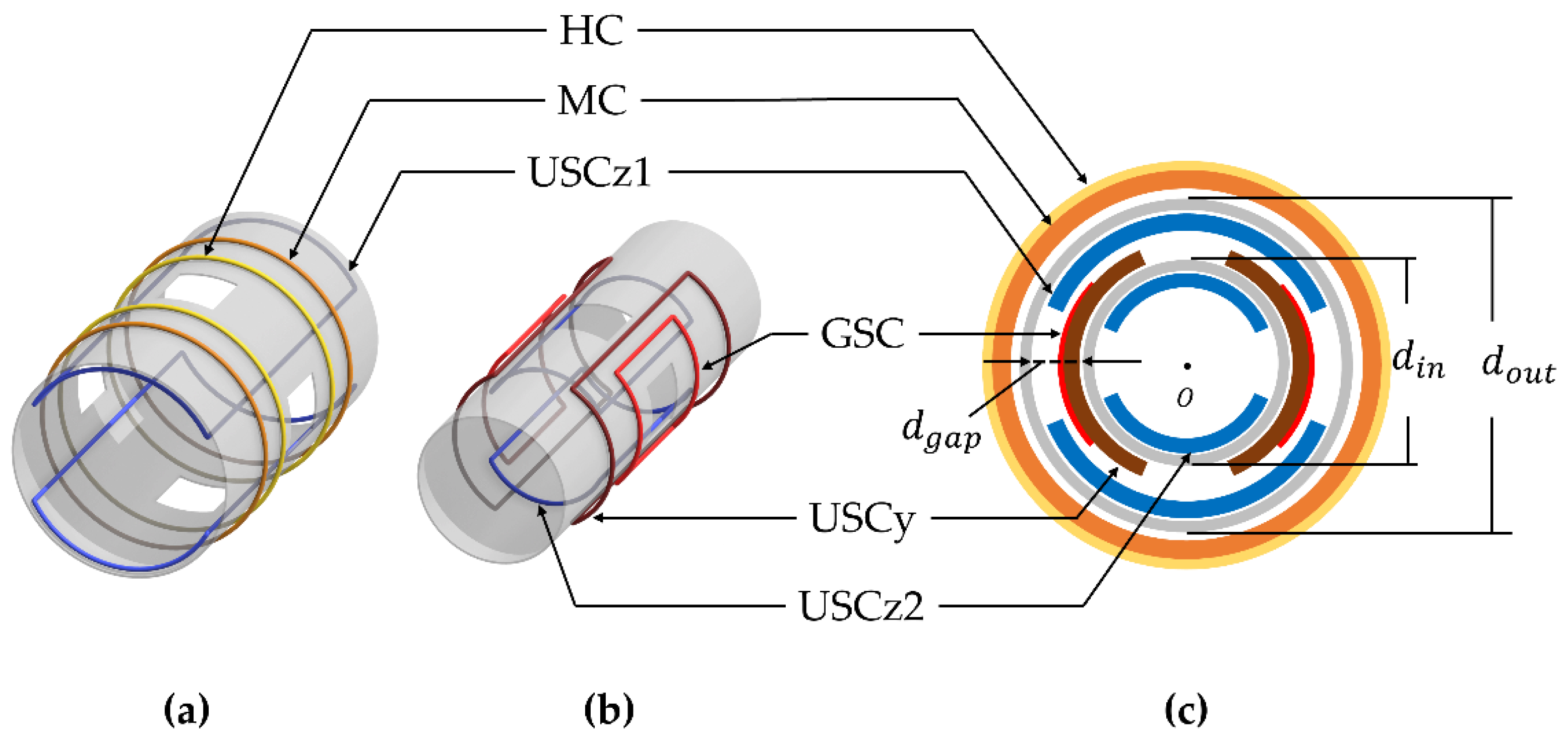
2.3. Arrangement of the MNS
3. Electrical Optimization of the MNS
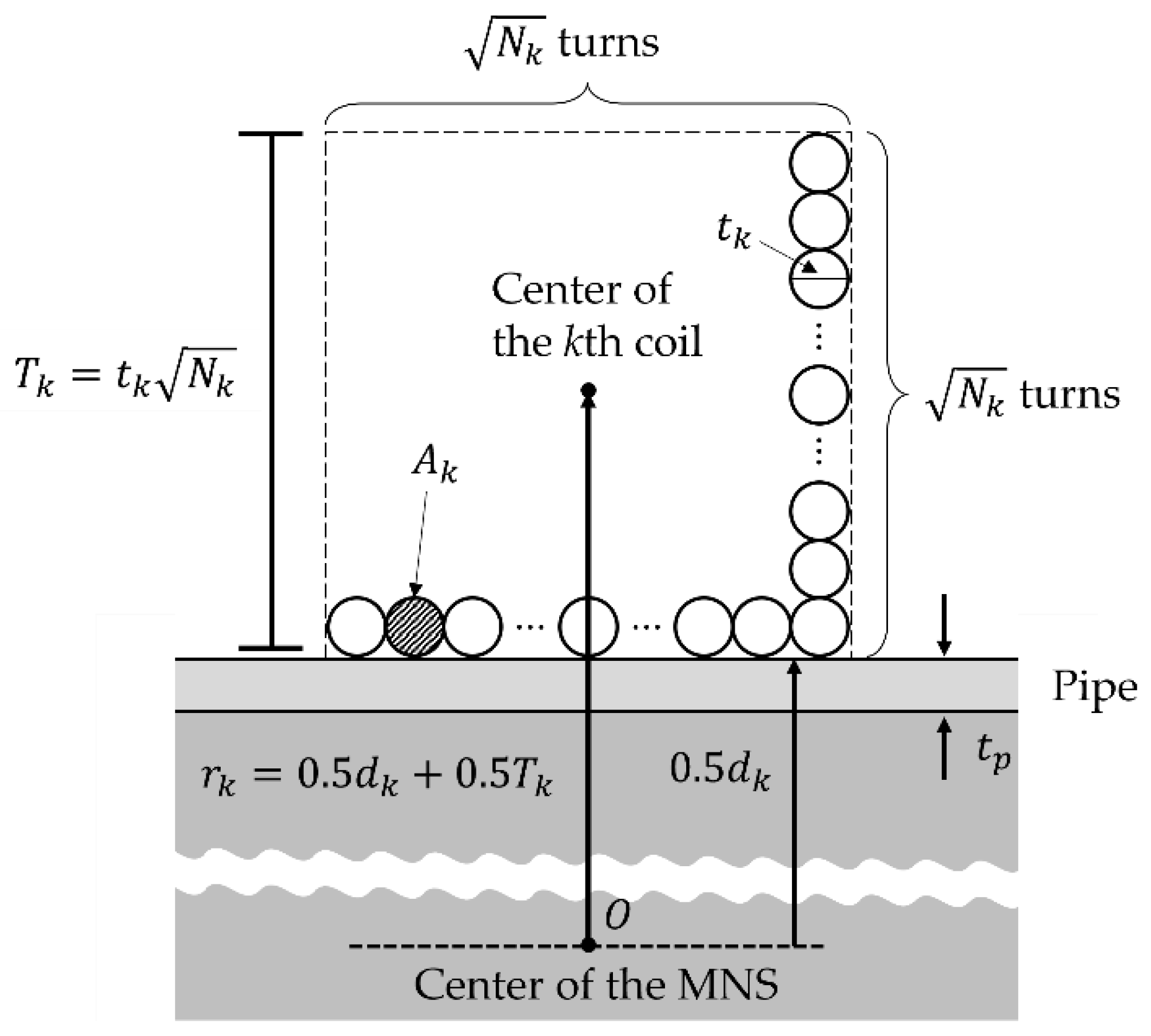
3.1. Objective Function and Design Variables of Each Coil
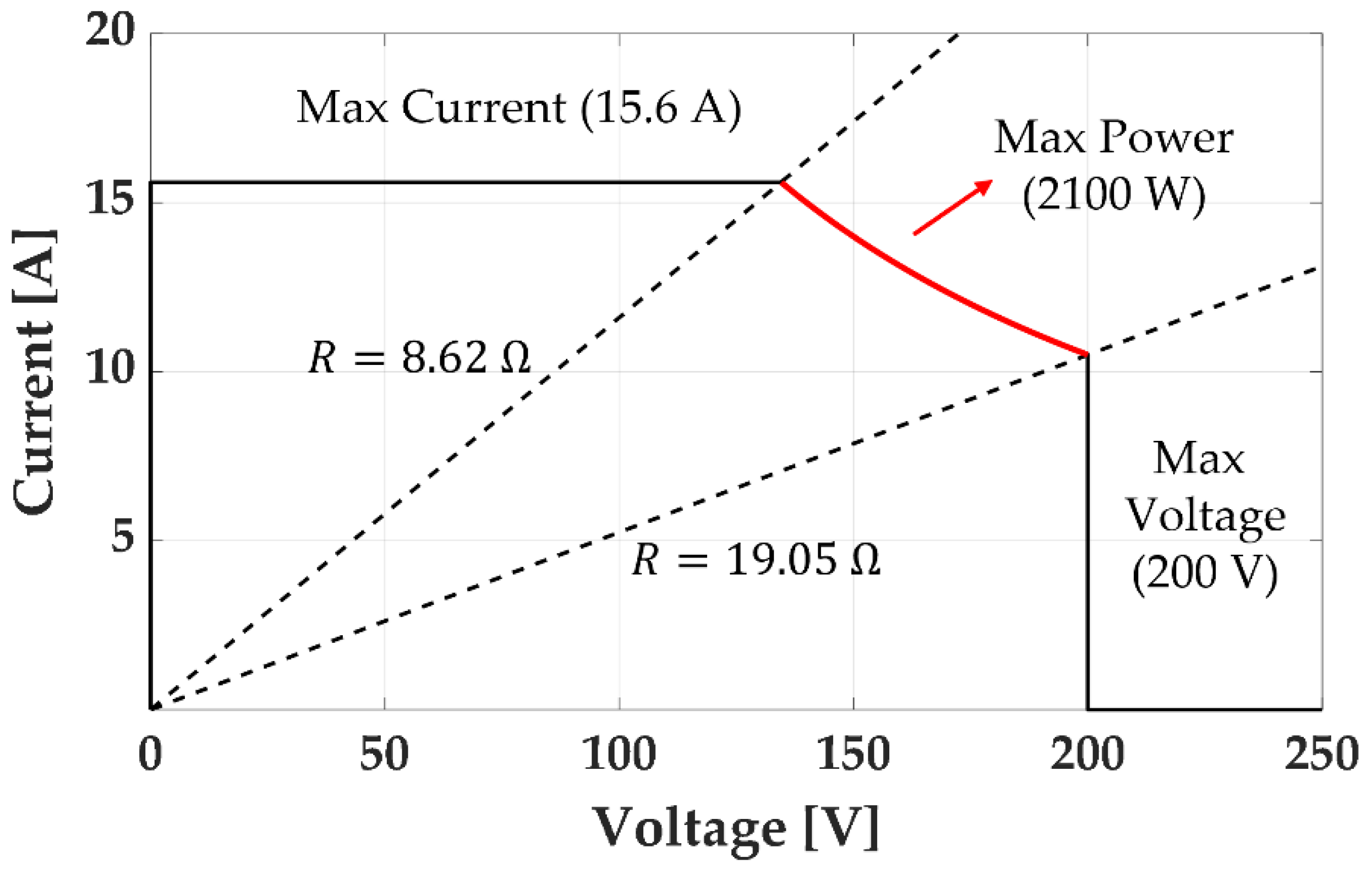
3.2. Constraints of Each Coil
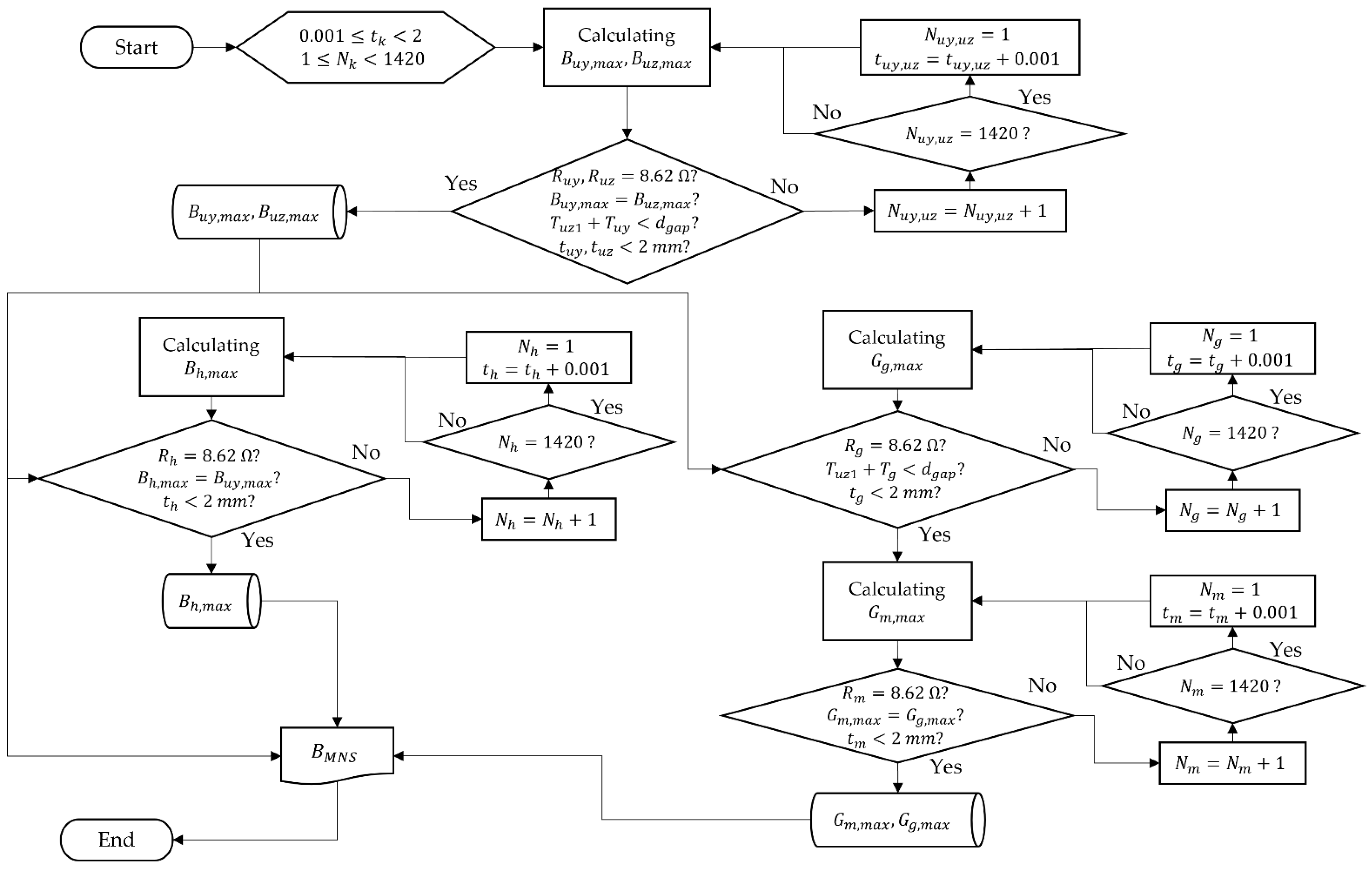
3.3. Algorithm to Optimize the MNS
4. Experiments
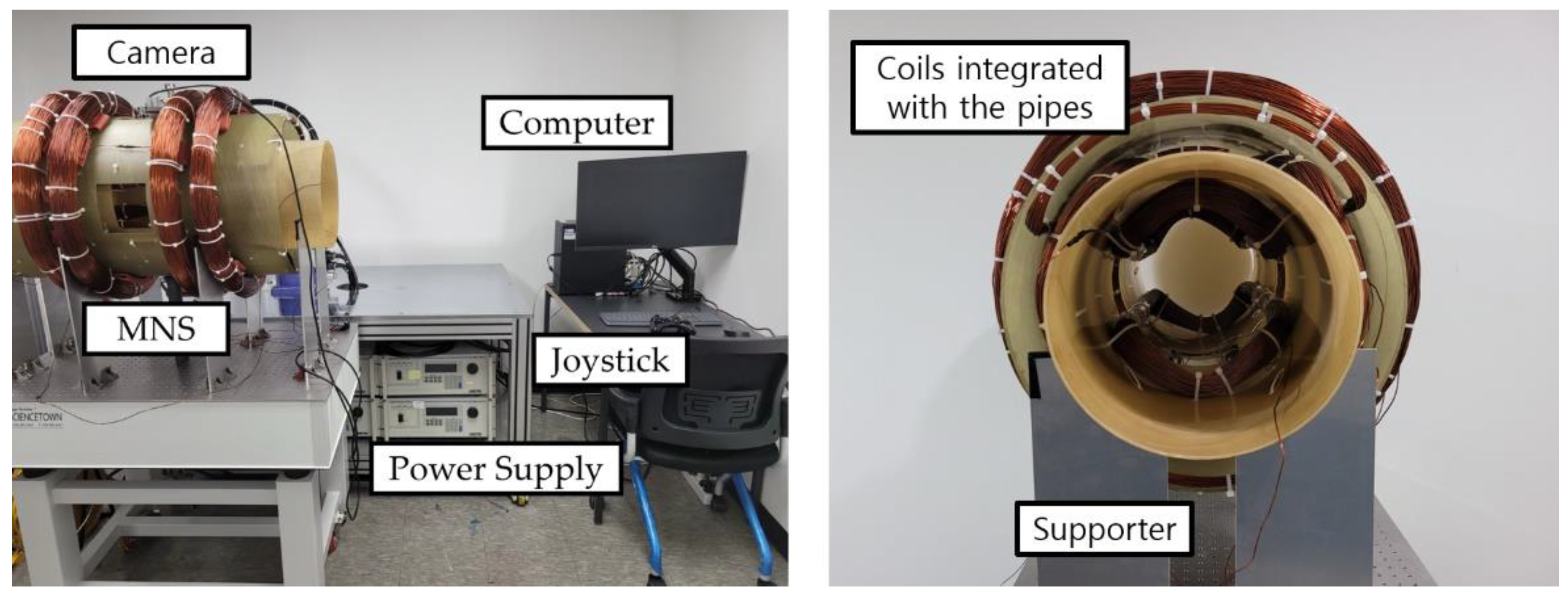
4.1. Construction of the MNS
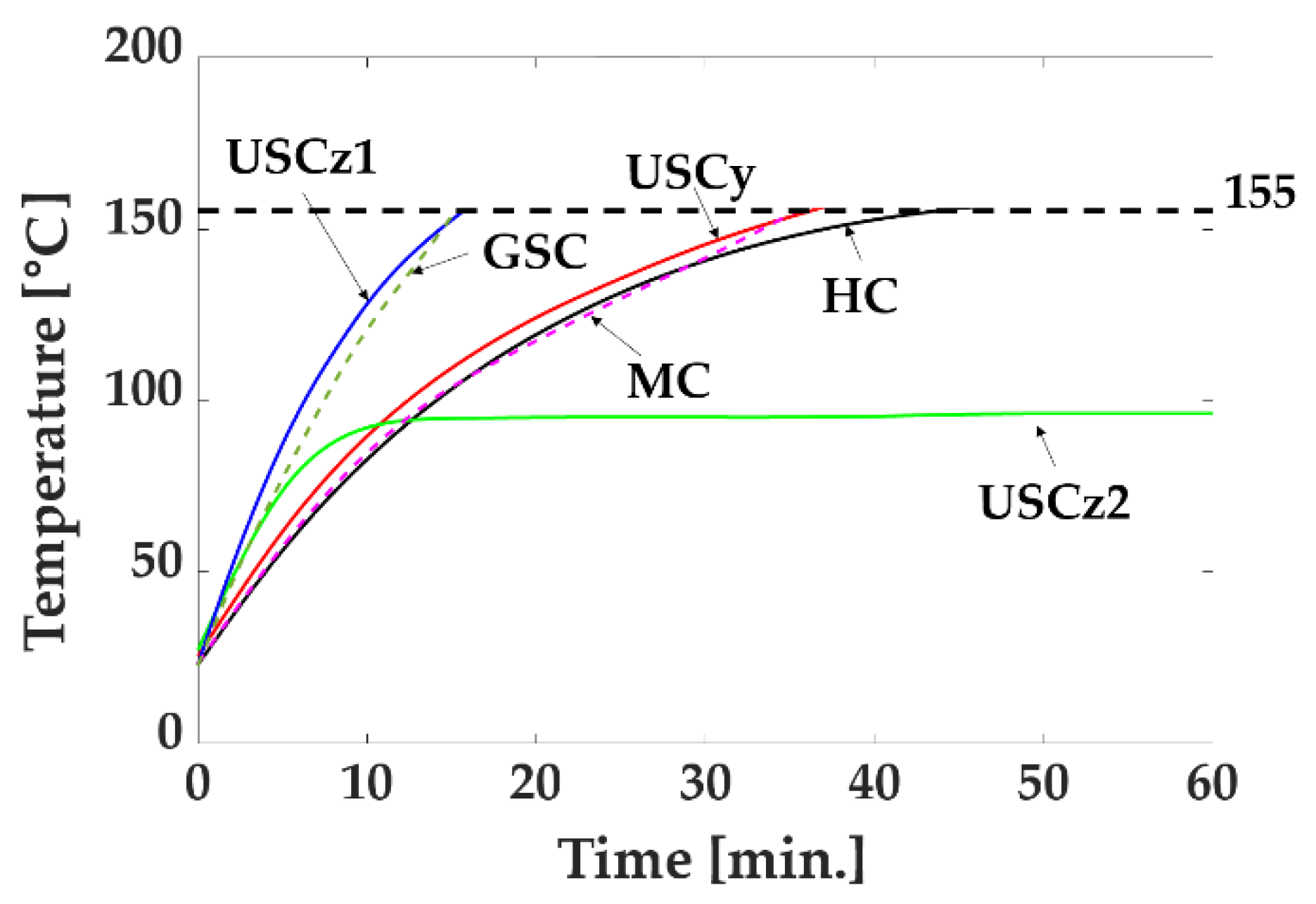
4.2. Heating Effect
4.3. Inductance Effect
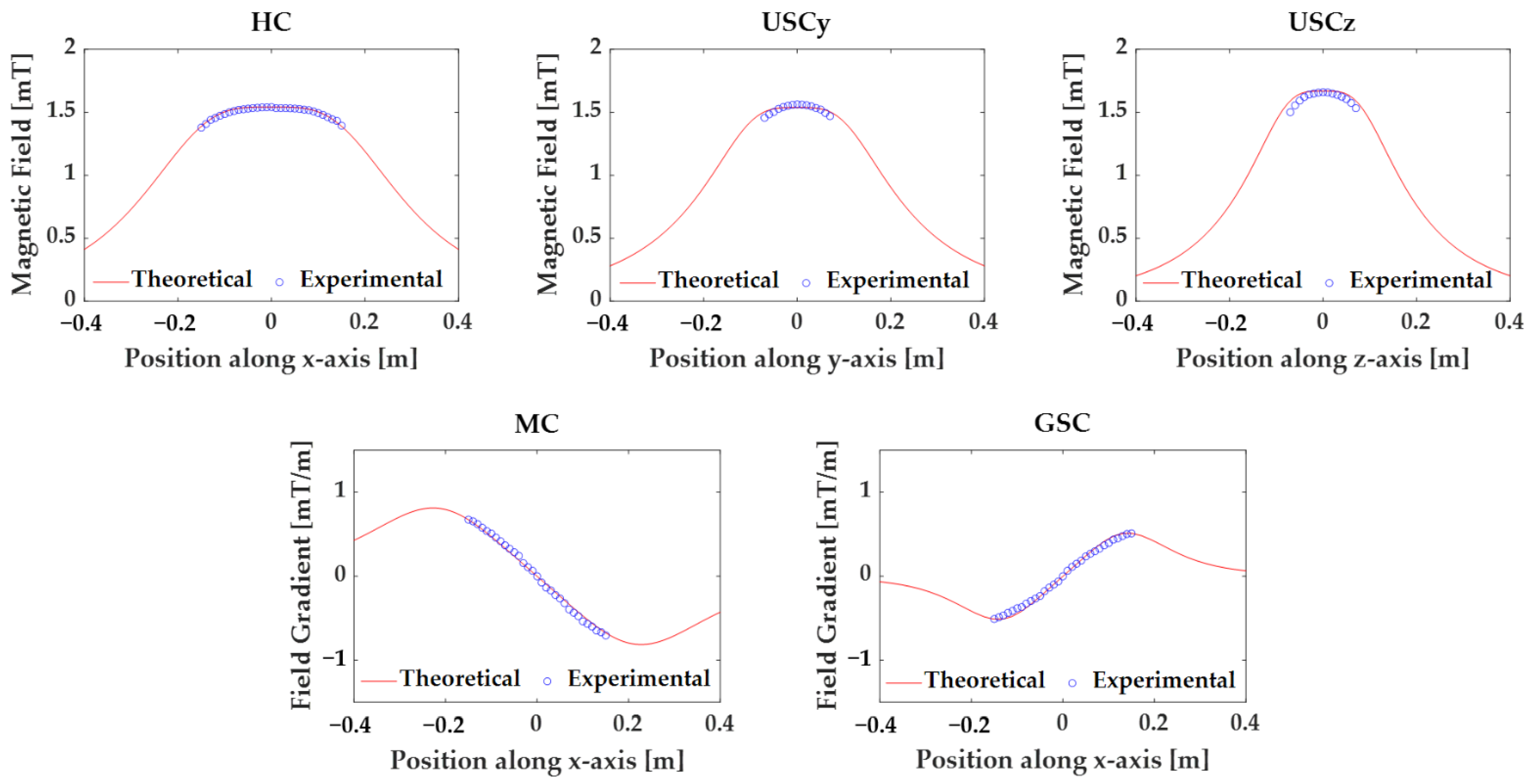
4.4. Comparison to the Conventional System
4.5. Performance Test Using a Rotating Magnetic Field
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nam, J.; Lai, Y.P.; Gauthier, L.; Jang, G.; Diller, E. Resonance-Based Design of Wireless Magnetic Capsule for Effective Sampling of Microbiome in Gastrointestinal Tract. Sens. Actuators A 2022, 342, 113654. [Google Scholar] [CrossRef]
- Shokrollahi, P.; Lai, Y.P.; Rash-Ahmadi, S.; Stewart, V.; Mohammadigheisar, M.; Huber, L.-A.; Matsuura, N.; Zavodni, A.E.H.; Parkinson, J.; Diller, E. Blindly Controlled Magnetically Actuated Capsule for Noninvasive Sampling of the Gastrointestinal Microbiome. IEEE/ASME Trans. Mechatron. 2021, 26, 2616–2628. [Google Scholar] [CrossRef]
- Forbrigger, C.; Lim, A.; Onaizah, O.; Salmanipour, S.; Looi, T.; Drake, J.; Diller, E.D. Cable-Less, Magnetically Driven Forceps for Minimally Invasive Surgery. IEEE Robot. Autom. Lett. 2019, 4, 1202–1207. [Google Scholar] [CrossRef]
- Bernat, J.; Gajewski, P.; Kapela, R.; Marcinkowska, A.; Superczyńska, P. Design, Fabrication and Analysis of Magnetorheological Soft Gripper. Sensors 2022, 22, 2757. [Google Scholar] [CrossRef] [PubMed]
- Lee, W.; Nam, J.; Kim, J.; Jung, E.; Kim, N.; Jang, G. Steering, Tunneling, and Stent Delivery of a Multifunctional Magnetic Catheter Robot to Treat Occlusive Vascular Disease. IEEE Trans. Ind. Electron. 2020, 68, 391–400. [Google Scholar] [CrossRef]
- Kim, M.C.; Kim, E.S.; Park, J.O.; Choi, E.; Kim, C.S. Robotic Localization Based on Planar Cable Robot and Hall Sensor Array Applied to Magnetic Capsule Endoscope. Sensors 2020, 20, 5728. [Google Scholar] [CrossRef] [PubMed]
- Ji, D.M.; Jung, W.S.; Kim, S.H. Wireless Manipulation Mechanism and Analysis for Actively Assistive Pinch Movements. Sensors 2021, 21, 6216. [Google Scholar] [CrossRef]
- Mathieu, J.B.; Beaudoin, G.; Martel, S. Method of Propulsion of a Ferromagnetic Core in the Cardiovascular System through Magnetic Gradients Generated by an MRI System. IEEE Trans. Biomed. Eng. 2006, 53, 292–299. [Google Scholar] [CrossRef] [PubMed]
- Li, N.; Jiang, Y.; Plantefève, R.; Michaud, F.; Nosrati, Z.; Tremblay, C.; Saatchi, K.; Häfeli, U.O.; Kadoury, S.; Moran, G.; et al. Magnetic Resonance Navigation for Targeted Embolization in a Two-Level Bifurcation Phantom. Ann. Biomed. Eng. 2019, 47, 2402–2415. [Google Scholar] [CrossRef]
- Griese, F.; Knopp, T.; Gruettner, C.; Thieben, F.; Müller, K.; Loges, S.; Ludewig, P.; Gdaniec, N. Simultaneous Magnetic Particle Imaging and Navigation of Large Superparamagnetic Nanoparticles in Bifurcation Flow Experiments. J. Magn. Magn. Mater. 2020, 498, 166206. [Google Scholar] [CrossRef]
- Karvelas, E.G.; Lampropoulos, N.K.; Karakasidis, T.E.; Sarris, I.E. Computational Study of the Optimum Gradient Magnetic Field for the Navigation of the Spherical Particles in the Process of Cleaning the Water from Heavy Metals. Procedia Eng. 2016, 162, 77–82. [Google Scholar] [CrossRef][Green Version]
- Zhang, X.; Le, T.-A.; Yoon, J. Development of a Real Time Imaging-Based Guidance System of Magnetic Nanoparticles for Targeted Drug Delivery. J. Magn. Magn. Mater. 2017, 427, 345–351. [Google Scholar] [CrossRef]
- Hoshiar, A.K.; Le, T.-A.; Valdastri, P.; Yoon, J. Swarm of Magnetic Nanoparticles Steering in Multi-Bifurcation Vessels under Fluid Flow. J. Micro-Bio Robot. 2020, 16, 137–145. [Google Scholar] [CrossRef]
- Kummer, M.P.; Abbott, J.J.; Kratochvil, B.E.; Borer, R.; Sengul, A.; Nelson, B.J. OctoMag: An Electromagnetic System for 5-DOF Wireless Micromanipulation. IEEE Trans. Robot. 2010, 26, 1006–1017. [Google Scholar] [CrossRef]
- Diller, E.; Giltinan, J.; Lum, G.Z.; Ye, Z.; Sitti, M. Six-Degree-of-Freedom Magnetic Actuation for Wireless Microrobotics. Int. J. Robot. Res. 2016, 35, 114–128. [Google Scholar] [CrossRef]
- Nam, J.; Lee, W.; Jung, E.; Jang, G. Magnetic Navigation System Utilizing a Closed Magnetic Circuit to Maximize Magnetic Field and a Mapping Method to Precisely Control Magnetic Field in Real Time. IEEE Trans. Ind. Electron. 2017, 65, 5673–5681. [Google Scholar] [CrossRef]
- Erni, S.; Schürle, S.; Fakhraee, A.; Kratochvil, B.E.; Nelson, B.J. Comparison, Optimization, and Limitations of Magnetic Manipulation Systems. J. Micro-Bio Robot. 2013, 8, 107–120. [Google Scholar] [CrossRef]
- Mahoney, A.W.; Sarrazin, J.C.; Bamberg, E.; Abbott, J.J. Velocity Control with Gravity Compensation for Magnetic Helical Microswimmers. Adv. Robot. 2011, 25, 1007–1028. [Google Scholar] [CrossRef]
- Jeong, S.; Choi, H.; Cha, K.; Li, J.; Park, J.; Park, S. Enhanced Locomotive and Drilling Microrobot Using Precessional and Gradient Magnetic Field. Sens. Actuators A 2011, 171, 429–435. [Google Scholar] [CrossRef]
- Bell, D.J.; Leutenegger, S.; Hammar, K.M.; Dong, L.X.; Nelson, B.J. Flagella-Like Propulsion for Microrobots Using a Nanocoil and a Rotating Rlectromagnetic Field. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 1128–1133. [Google Scholar] [CrossRef]
- Choi, H.; Cha, K.; Jeong, S.; Park, J.-O.; Park, S. 3-D Locomotive and Drilling Microrobot Using Novel Stationary EMA System. IEEE/ASME Trans. Mechatron. 2013, 18, 1221–1225. [Google Scholar] [CrossRef]
- Choi, H.; Choi, J.; Jeong, S.; Yu, C.; Park, J.; Park, S. Two-Dimensional Locomotion of a Microrobot with a Novel Stationary Electromagnetic Actuation System. Smart Mater. Struct. 2009, 18, 115017. [Google Scholar] [CrossRef]
- Arcese, L.; Fruchard, M.; Ferreira, A. Adaptive Controller and Observer for a Magnetic Microrobot. IEEE Trans. Robot. 2013, 29, 1060–1067. [Google Scholar] [CrossRef]
- Yesin, K.B.; Vollmers, K.; Nelson, B.J. Modeling and Control of Untethered Biomicrorobots in a Fluidic Environment Using Electromagnetic Fields. Int. J. Robot. Res. 2006, 25, 527–536. [Google Scholar] [CrossRef]
- Yu, C.; Kim, J.; Choi, H.; Choi, J.; Jeong, S.; Cha, K.; Park, J.; Park, S. Novel Electromagnetic Actuation System for Three-Dimensional Locomotion and Drilling of Intravascular Microrobot. Sens. Actuators A 2010, 161, 297–304. [Google Scholar] [CrossRef]
- Jeon, S.; Jang, G.; Choi, H.; Park, S. Magnetic Navigation System with Gradient and Uniform Saddle Coils for the Wireless Manipulation of Micro-robots in Human Blood Vessels. IEEE Trans. Magn. 2010, 46, 1943–1946. [Google Scholar] [CrossRef]
- Jeon, S.M.; Jang, G.H.; Choi, H.C.; Park, S.H.; Park, J.O. Magnetic Navigation System for the Precise Helical and Translational Motions of a Microrobot in Human Blood Vessels. J. Appl. Phys. 2012, 111, 07E702. [Google Scholar] [CrossRef]
- Jeon, S.M.; Jang, G.H.; Choi, H.C.; Park, S.H.; Park, J.O. Utilization of Magnetic Gradients in a Magnetic Navigation System for the Translational Motion of a Micro-robot in Human Blood Vessels. IEEE Trans. Magn. 2011, 47, 2403–2406. [Google Scholar] [CrossRef]
- Choi, H.; Cha, K.; Choi, J.; Jeong, S.; Jeon, S.; Jang, G.; Park, J.; Park, S. EMA System with Gradient and Uniform Saddle Coils for 3D Locomotion of Microrobot. Sens. Actuators A 2010, 163, 410–417. [Google Scholar] [CrossRef]
- Go, G.; Choi, H.; Jeong, S.; Lee, C.; Ko, S.Y.; Park, J.-O.; Park, S. Electromagnetic Navigation System Using Simple Coil Structure (4 Coils) for 3-D Locomotive Microrobot. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Son, D.; Gilbert, H.; Sitti, M. Magnetically Actuated Soft Capsule Endoscope for Fine-Needle Biopsy. Soft Robot. 2019, 7, 10–21. [Google Scholar] [CrossRef]
- Abbott, J.J.; Peyer, K.E.; Lagomarsino, M.C.; Zhang, L.; Dong, L.; Kaliakatsos, I.K.; Nelson, B.J. How Should Microrobots Swim? Int. J. Robot. Res. 2009, 28, 1434–1447. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | HC | USCy | USCz1 | USCz2 | MC | GSC |
|---|---|---|---|---|---|---|
| ) (mm) | 249.8 | 173.1 | 220.0 | 137.0 | 248.2 | 173.2 |
| ) (turns) | 448 | 370 | 40 | 269 | 413 | 479 |
| ) (mm) | 1.86 | 1.89 | 1.59 | 1.79 | 1.65 | |
| ) (Ω) | 8.62 | 8.62 | 8.64 | 8.62 | 8.63 | |
| ) (mT/m) | 25.16 | 25.15 | 25.26 | 84.26 | 102.99 | |
| Variables | HC | USCy | USCz1 | USCz2 | MC | GSC |
|---|---|---|---|---|---|---|
| ) (mm) | 262.3 | 175.0 | 220.0 | 137.1 | 260.7 | 170.0 |
| ) (Ω) | 10.2 | 9.8 | 9.0 | 10.1 | 9.0 | |
| ) (mH) | 405.1 | 364.6 | 170.2 | 303.0 | 248.5 | |
| ) (mT/m) | 20.00 | 23.11 | 25.02 | 70.04 | 106.67 | |
| HC | USCy | USCz | MC | GSC | |
|---|---|---|---|---|---|
| Correction coefficients | 0.9045 | 0.9540 | 1.0313 | 0.8623 | 1.0739 |
| Variables | Conventional MNS | Optimized MNS | Differences [%] | |
|---|---|---|---|---|
| Max magnetic field (mT) | HC | 14.18 | 20.00 | 41 |
| USCy | 21.69 | 23.11 | 7 | |
| USCz | 14.04 | 25.02 | 78 | |
| Max magnetic field gradient (mT/m) | MC | 121.3 | 70.04 | −42 |
| GSC | 83.70 | 106.67 | 27 | |
| Inductance (mH) | HC | 344.5 | 405.1 | 18 |
| USCy | 201.3 | 364.1 | 81 | |
| USCz | 394.3 | 170.2 | −57 | |
| MC | 859.9 | 303.0 | −65 | |
| GSC | 84.60 | 248.5 | 194 | |
| Operating time limit with max. power (min) | HC | 7 | 60 | 757 |
| USCy | 15 | 40 | 167 | |
| USCz | 10 | 16 | 60 | |
| MC | 14 | 35 | 150 | |
| GSC | 2 | 17 | 750 | |
| Diameter of an MNS (mm) | Outer | 470 | 526 | 12 |
| Inner | 235 | 240 | 2 | |
| Max power for each coil (W) | 2100 | 2100 | - | |
| Variables | Conventional MNS | Optimized MNS | Differences (%) |
|---|---|---|---|
| Max. 3D rotating magnetic field (mT) | 14.04 | 20.00 | 42 |
| Min. magnetic field gradient (mT/m) | 83.70 | 70.04 | −16 |
| Max. inductance (mH) | 859.9 | 405.1 | −53 |
| Min. operating time limit of the coils with max. power (min.) | 2 | 16 | 700 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Cho, M.; Im, S.; Yun, J.; Nam, J. Electrical Optimization Method Based on a Novel Arrangement of the Magnetic Navigation System with Gradient and Uniform Saddle Coils. Sensors 2022, 22, 5603. https://doi.org/10.3390/s22155603
Kim S, Cho M, Im S, Yun J, Nam J. Electrical Optimization Method Based on a Novel Arrangement of the Magnetic Navigation System with Gradient and Uniform Saddle Coils. Sensors. 2022; 22(15):5603. https://doi.org/10.3390/s22155603
Chicago/Turabian StyleKim, Sungjun, Mingyu Cho, Seyeong Im, Joongho Yun, and Jaekwang Nam. 2022. "Electrical Optimization Method Based on a Novel Arrangement of the Magnetic Navigation System with Gradient and Uniform Saddle Coils" Sensors 22, no. 15: 5603. https://doi.org/10.3390/s22155603
APA StyleKim, S., Cho, M., Im, S., Yun, J., & Nam, J. (2022). Electrical Optimization Method Based on a Novel Arrangement of the Magnetic Navigation System with Gradient and Uniform Saddle Coils. Sensors, 22(15), 5603. https://doi.org/10.3390/s22155603