
A Time-of-Flight Estimation Method for Acoustic Ranging and Thermometry Based on Digital Lock-In Filtering

 ,
,  , ,
, ,  , and
, and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Principle of Acoustic Ranging and Thermometry
2.1. Acoustic Source Signal Model
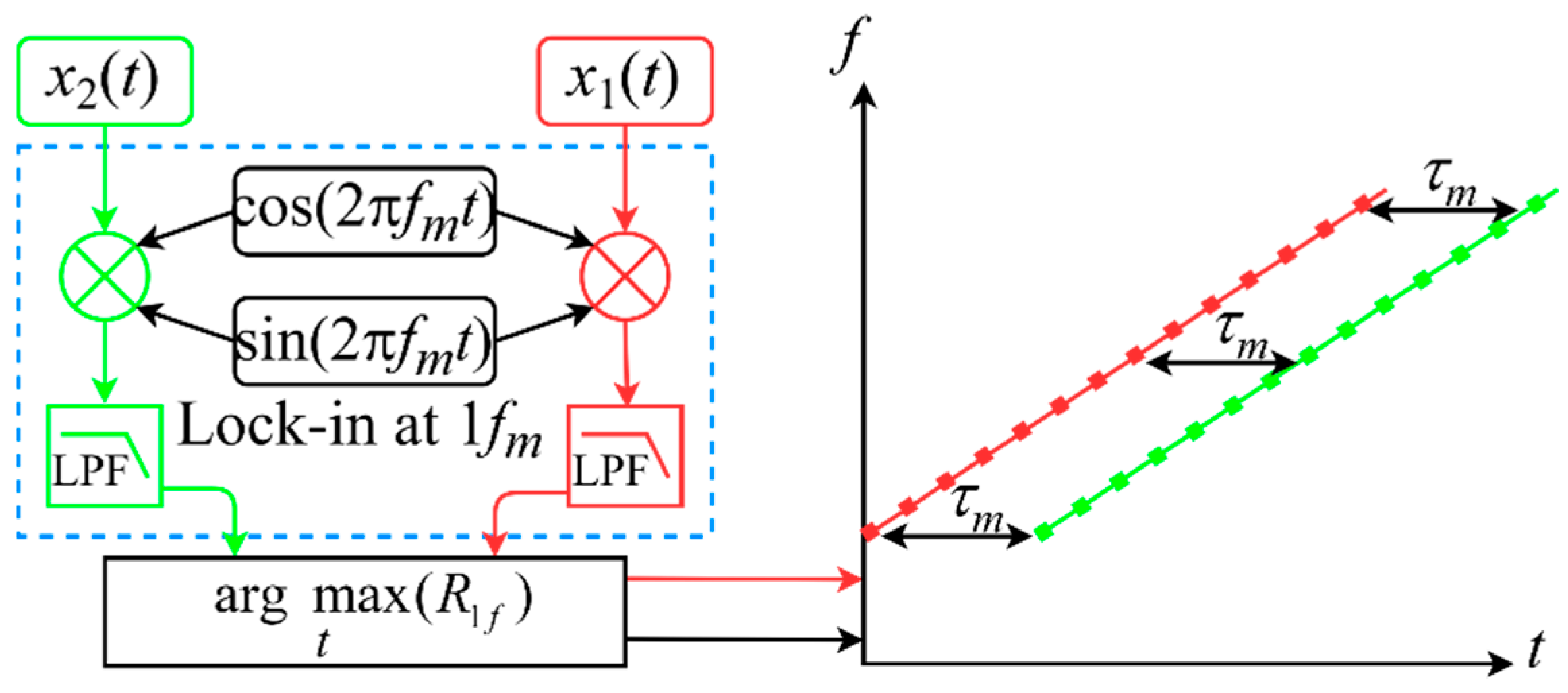
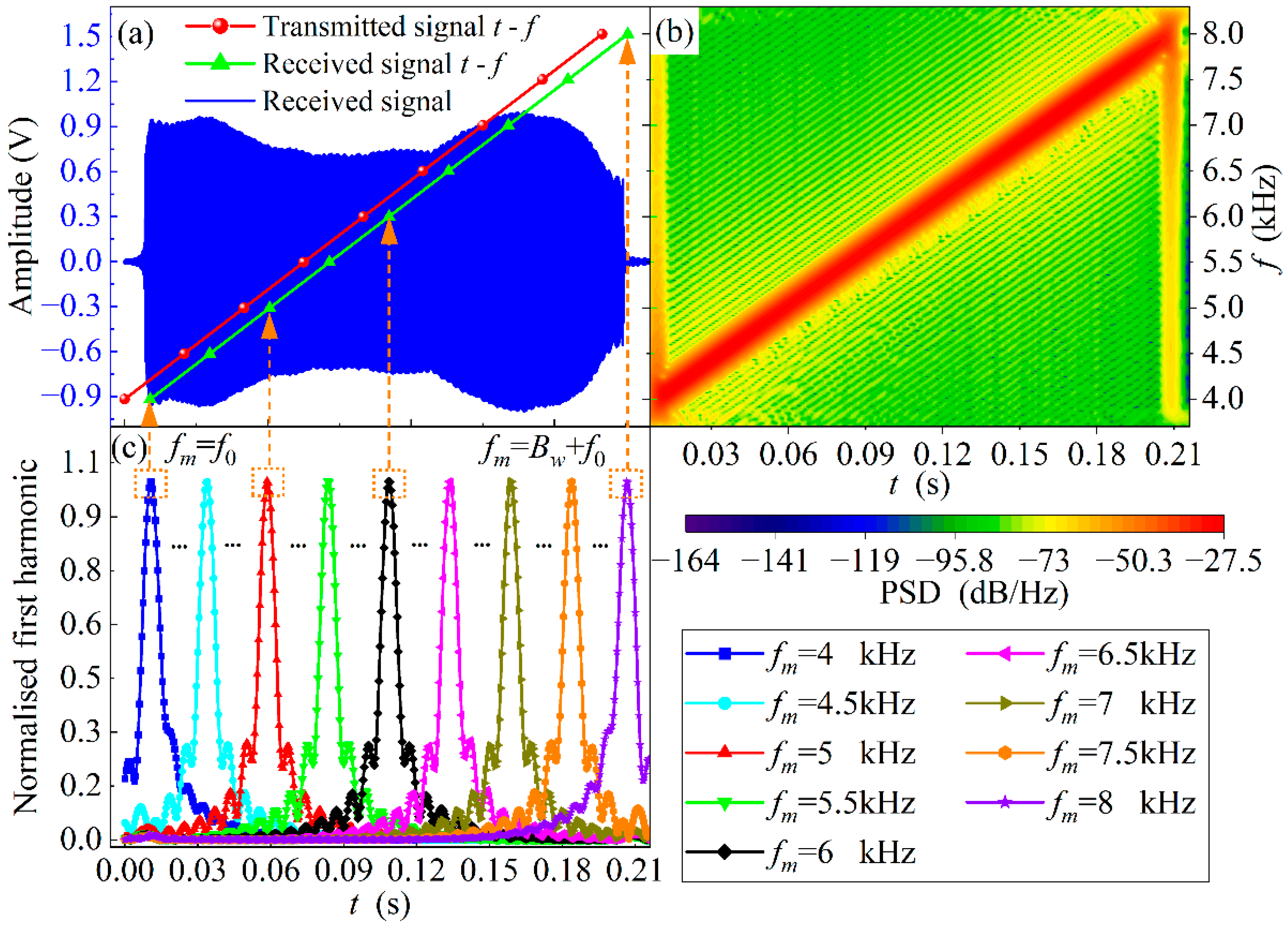
2.2. The DLF-Based Acoustic Time-of-Flight Estimation Method
2.3. Cross-Correlation Time-of-Flight Estimation Method
3. Results Analysis and Discussion
3.1. Experiment Setup
3.2. System Error Calibration
3.3. Analysis of the Measurement Results
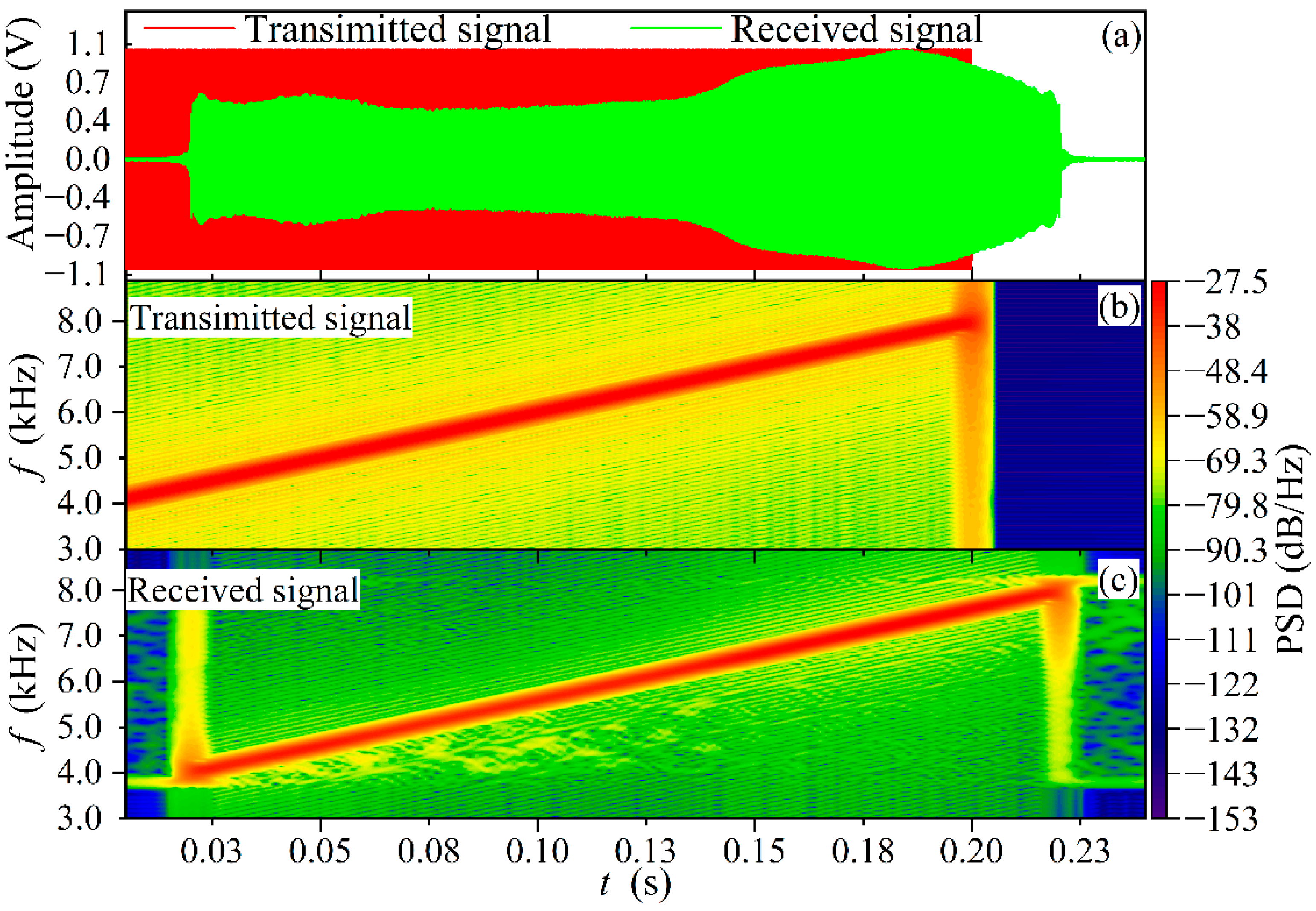
3.3.1. Acoustic Ranging and TOF Estimation in Different Conduit Length
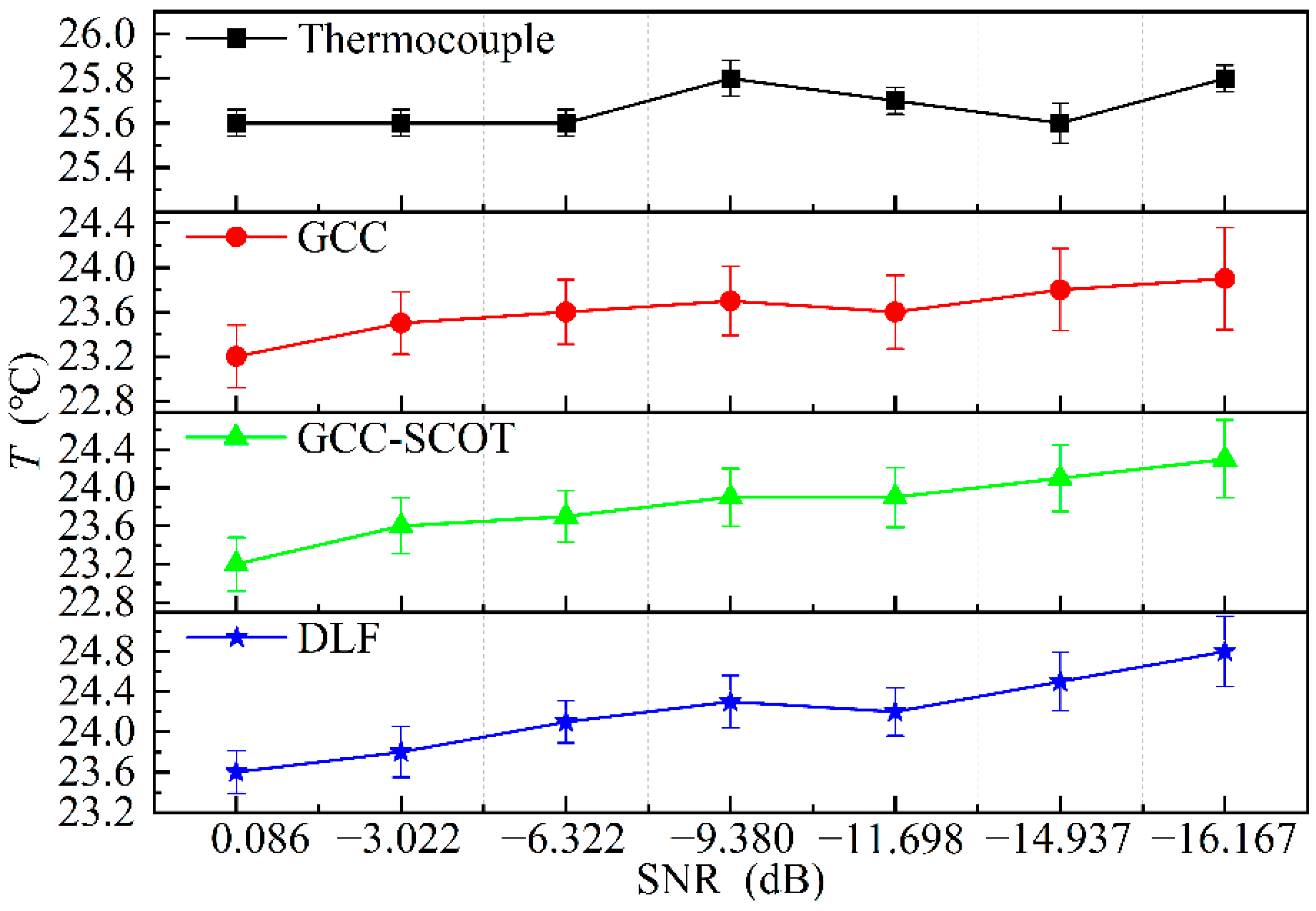
3.3.2. Experiments on Temperature Monitoring with Noise Interference at Different Energy Levels
3.3.3. Experiments on Temperature Monitoring at Different Temperatures
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Godbout, M.; Deschênes, J.-D.; Genest, J. Spectrally Resolved Laser Ranging with Frequency Combs. Opt. Express OE 2010, 18, 15981–15989. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Zhou, B.; Liu, C. Calibration-Free Wavelength Modulation Spectroscopy Based on Even-Order Harmonics. Opt. Express 2021, 29, 26618–26633. [Google Scholar] [CrossRef]
- Wang, P.; Xiao, X.; Zhang, Z.; Sun, C. Study on the Position and Orientation Measurement Method with Monocular Vision System. Chin. Opt. Lett. COL 2010, 8, 55–58. [Google Scholar] [CrossRef]
- Dai, M.; Zhou, B.; Zhang, J.; Zuo, B.; Wang, Y. Experimental and Simulation Investigation of 3-D Soot Temperature and Volume Fraction Fields of Afterburner Flame. Case Stud. Therm. Eng. 2022, 33, 101932. [Google Scholar] [CrossRef]
- Wu, J.; Zhu, J.; Yang, L.; Shen, M.; Xue, B.; Liu, Z. A Highly Accurate Ultrasonic Ranging Method Based on Onset Extraction and Phase Shift Detection. Measurement 2014, 47, 433–441. [Google Scholar] [CrossRef]
- Megej, A.; Beilenhoff, K.; Schussler, M.; Ziroff, A.; Mottet, B.; Yilmazoglu, O.; Mutamba, K.; Hamann, C.D.; Baican, R.; Hartnagel, H.L. Integrated Microwave Sensors for Cavity-Length Measurement in Machine Engineering. IEEE Trans. Microw. Theory Tech. 2002, 50, 3070–3076. [Google Scholar] [CrossRef]
- Hwang, O.; Lee, M.C.; Weng, W.; Zhang, Y.; Li, Z. Development of Novel Ultrasonic Temperature Measurement Technology for Combustion Gas as a Potential Indicator of Combustion Instability Diagnostics. Appl. Therm. Eng. 2019, 159, 113905. [Google Scholar] [CrossRef]
- Moran, D.S.; Eliyahu, U.; Heled, Y.; Rabinovitz, S.; Hoffman, J.; Margaliot, M. Core Temperature Measurement by Microwave Radiometry. J. Therm. Biol. 2004, 29, 539–542. [Google Scholar] [CrossRef]
- Tanaka, S.; Okamoto, M. Dynamic Model Based Length Measurement Using Stationary Waves. Measurement 2000, 28, 249–259. [Google Scholar] [CrossRef]
- Okamoto, M.; Nakayama, M.; Tanaka, S. Accurate Pipe Length Measurement Under Noisy Environment Using Stationary Waves. In Proceedings of the ISCIE International Symposium on Stochastic Systems Theory and Its Applications, Saitama, Japan, 3–4 November 2004; Volume 2004, pp. 81–84. [Google Scholar] [CrossRef]
- Tanaka, S.; Okamoto, M.; Nakayama, M. Length Measurement of Pipes with Open Ends Under Noisy Environment Using Stationary Wave. In Proceedings of the ISCIE International Symposium on Stochastic Systems Theory and its Applications, Ube, Japan, 30–31 October 2003; Volume 2003, pp. 114–118. [Google Scholar] [CrossRef]
- Eriksson, H.; Borjesson, P.O.; Odling, P.; Holmer, N.-G. A Robust Correlation Receiver for Distance Estimation. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1994, 41, 596–603. [Google Scholar] [CrossRef]
- Manabe, T.; Tsujimura, T.; Tomita, S.; Tabuta, T. Acoustic Inspection System for Underground Telecommunication Conduit. In Proceedings of the 10th Anniversary IMTC/94: Advanced Technologies in I & M. 1994 IEEE Instrumentation and Measurement Technolgy Conference (Cat. No.94CH3424-9), Hamamatsu, Japan, 10–12 May 1994; Volume 2, pp. 761–764. [Google Scholar]
- Peng, C.; Shen, G.; Zhang, Y.; Li, Y.; Tan, K. BeepBeep: A High Accuracy Acoustic Ranging System Using COTS Mobile Devices. In Proceedings of the 5th International Conference on Embedded Networked Sensor Systems, Sydney, NSW, Australia, 6–9 November 2007; Association for Computing Machinery: New York, NY, USA, 2007; pp. 1–14. [Google Scholar]
- Zhiganov, I.Y.; Skvortsov, B.V.; Sinnikov, S.G. Electronic-Acoustic Instruments for Measuring Pipe Lengths. Meas. Tech. 2002, 45, 769–772. [Google Scholar] [CrossRef]
- Liu, Q.; Zhou, B.; Zhang, J.; Cheng, R. Development of Flue Gas Audio-Range Velocimeter Using Quadratic-Convex Frequency Sweeping. IEEE Sens. J. 2021, 21, 9777–9787. [Google Scholar] [CrossRef]
- Knapp, C.; Carter, G. The Generalized Correlation Method for Estimation of Time Delay. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 320–327. [Google Scholar] [CrossRef]
- Tu, Y.Q.; Shen, Y.L. Phase Correction Autocorrelation-Based Frequency Estimation Method for Sinusoidal Signal. Signal Process. 2017, 130, 183–189. [Google Scholar] [CrossRef]
- Reed, F.; Feintuch, P.; Bershad, N. Time Delay Estimation Using the LMS Adaptive Filter--Static Behavior. IEEE Trans. Acoust. Speech Signal Process. 1981, 29, 561–571. [Google Scholar] [CrossRef]
- So, H.C. Noisy Input–Output System Identification Approach for Time Delay Estimation. Signal Process. 2002, 82, 1471–1475. [Google Scholar] [CrossRef]
- So, H.C.; Ching, P.C.; Chan, Y.T. A New Algorithm for Explicit Adaptation of Time Delay. IEEE Trans. Signal Process. 1994, 42, 1816–1820. [Google Scholar] [CrossRef]
- So, H.C.; Ching, P.C. Comparative Study of Five LMS-Based Adaptive Time Delay Estimators. IEE Proc. Radar Sonar Navig. 2001, 148, 9–15. [Google Scholar] [CrossRef]
- Porat, B.; Friedlander, B. Direction Finding Algorithms Based on High-Order Statistics. In Proceedings of the International Conference on Acoustics, Speech, and Signal Processing, Albuquerque, NM, USA, 3–6 April 1990; Volume 5, pp. 2675–2678. [Google Scholar]
- Gonen, E.; Mendel, J.M. Applications of Cumulants to Array Processing. Part VI. Polarization and Direction of Arrival Estimation with Minimally Constrained Arrays. IEEE Trans. Signal Process. 1999, 47, 2589–2592. [Google Scholar] [CrossRef]
- Hou, H.; Sheng, G.; Zhu, W.; Wang, H.; Jiang, X. Time-Delay Estimation Algorithm of Partial Discharge Ultra High Frequency Signals Based on Higher-Order Cumulant. High Volt. Eng. 2013, 39, 342–347. [Google Scholar] [CrossRef]
- Kedem, B. Spectral Analysis and Discrimination by Zero-Crossings. Proc. IEEE 1986, 74, 1477–1493. [Google Scholar] [CrossRef]
- Friedman, V. A Zero Crossing Algorithm for the Estimation of the Frequency of a Single Sinusoid in White Noise. IEEE Trans. Signal Process. 1994, 42, 1565–1569. [Google Scholar] [CrossRef]
- Wang, S.; Tang, M. Exact Confidence Interval for Magnitude-Squared Coherence Estimates. IEEE Signal Process. Lett. 2004, 11, 326–329. [Google Scholar] [CrossRef]
- Piersol, A. Time Delay Estimation Using Phase Data. IEEE Trans. Acoust. Speech Signal Process. 1981, 29, 471–477. [Google Scholar] [CrossRef]
- Viola, F.; Walker, W.F. A Comparison between Spline-Based and Phase-Domain Time-Delay Estimators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2006, 53, 515–517. [Google Scholar] [CrossRef] [PubMed]
- Xia, W.; Jiang, W.; Zhu, L. An Adaptive Time Delay Estimator Based on ETDE Algorithm with Noisy Measurements. Chin. J. Electron. 2017, 26, 760–767. [Google Scholar] [CrossRef]
- Liu, Q.; Zhou, B.; Zhao, R.; Dai, M.; Wang, B.; Wang, Y. Development of Acoustic Thermometer and Velocimeter with High Temporal Resolution and Noise Suppression Capability. In Proceedings of the 2022 11th International Conference on Communications, Circuits and Systems (ICCCAS), Singapore, 13–15 May 2022; pp. 71–74. [Google Scholar]
- Zhang, S.; Shen, G.; An, L. Online Monitoring of Furnace Exit Gas Temperature in Power Plants. Appl. Therm. Eng. 2019, 147, 917–926. [Google Scholar] [CrossRef]
- Zhang, K.; Feng, X.J.; Zhang, J.T.; Duan, Y.Y.; Lin, H.; Duan, Y.N. Determination of T–T90 from 234 K to 303 K by Acoustic Thermometry with a Cylindrical Resonator. Metrologia 2020, 57, 024004. [Google Scholar] [CrossRef]
- Sun, S.J.; Xu, L.J.; Cao, Z.; Sun, J.T.; Yang, W.Q. Signal Demodulation Methods for Electrical Tomography: A Review. IEEE Sens. J. 2019, 19, 9026–9035. [Google Scholar] [CrossRef]
- Tsukada, K.; Kiwa, T. Magnetic Property Mapping System for Analyzing Three-Dimensional Magnetic Components. Rev. Sci. Instrum. 2006, 77, 063703. [Google Scholar] [CrossRef]
- Li, Y.; Tang, B.; Yi, Y. A Novel Complexity-Based Mode Feature Representation for Feature Extraction of Ship-Radiated Noise Using VMD and Slope Entropy. Appl. Acoust. 2022, 196, 108899. [Google Scholar] [CrossRef]
- Li, Y.; Tang, B.; Jiang, X.; Yi, Y. Bearing Fault Feature Extraction Method Based on GA-VMD and Center Frequency. Math. Probl. Eng. 2022, 2022, e2058258. [Google Scholar] [CrossRef]
- Li, Y.; Geng, B.; Jiao, S. Dispersion Entropy-Based Lempel-Ziv Complexity: A New Metric for Signal Analysis. Chaos Solitons Fractals 2022, 161, 112400. [Google Scholar] [CrossRef]
- Li, Y.; Gao, P.; Tang, B.; Yi, Y.; Zhang, J. Double Feature Extraction Method of Ship-Radiated Noise Signal Based on Slope Entropy and Permutation Entropy. Entropy 2022, 24, 22. [Google Scholar] [CrossRef] [PubMed]
- Zeqiri, B.; Cook, A.; Rétat, L.; Civale, J.; ter Haar, G. On Measurement of the Acoustic Nonlinearity Parameter Using the Finite Amplitude Insertion Substitution (FAIS) Technique. Metrologia 2015, 52, 406–422. [Google Scholar] [CrossRef]
- Zhang, C.; Shen, S.; Huang, H.; Wang, L. Estimation of the Vehicle Speed Using Cross-Correlation Algorithms and MEMS Wireless Sensors. Sensors 2021, 21, 1721. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Zhou, B.; Zhang, J.; Cheng, R.; Zhao, X.; Zhao, R.; Dai, M.; Wang, B.; Wang, Y. A Time-of-Flight Estimation Method for Acoustic Ranging and Thermometry Based on Digital Lock-In Filtering. Sensors 2022, 22, 5519. https://doi.org/10.3390/s22155519
Liu Q, Zhou B, Zhang J, Cheng R, Zhao X, Zhao R, Dai M, Wang B, Wang Y. A Time-of-Flight Estimation Method for Acoustic Ranging and Thermometry Based on Digital Lock-In Filtering. Sensors. 2022; 22(15):5519. https://doi.org/10.3390/s22155519
Chicago/Turabian StyleLiu, Qi, Bin Zhou, Jianyong Zhang, Ruixue Cheng, Xuhao Zhao, Rong Zhao, Minglu Dai, Bubin Wang, and Yihong Wang. 2022. "A Time-of-Flight Estimation Method for Acoustic Ranging and Thermometry Based on Digital Lock-In Filtering" Sensors 22, no. 15: 5519. https://doi.org/10.3390/s22155519
APA StyleLiu, Q., Zhou, B., Zhang, J., Cheng, R., Zhao, X., Zhao, R., Dai, M., Wang, B., & Wang, Y. (2022). A Time-of-Flight Estimation Method for Acoustic Ranging and Thermometry Based on Digital Lock-In Filtering. Sensors, 22(15), 5519. https://doi.org/10.3390/s22155519