

Optimization Algorithm for Delay Estimation Based on Singular Value Decomposition and Improved GCC-PHAT Weighting


Abstract
:1. Introduction
2. Theoretical Introduction of Delay Estimation Optimization Algorithm
2.1. TDOA Signal Model
2.2. Singular Value Decomposition Noise Reduction Theory
- (1)
- Singular value difference spectrum method
- (2)
- Feature mean method
- (3)
- Singular value median method
2.3. Improved PHAT Weighted Generalized Cross-Correlation Delay Estimation Algorithm
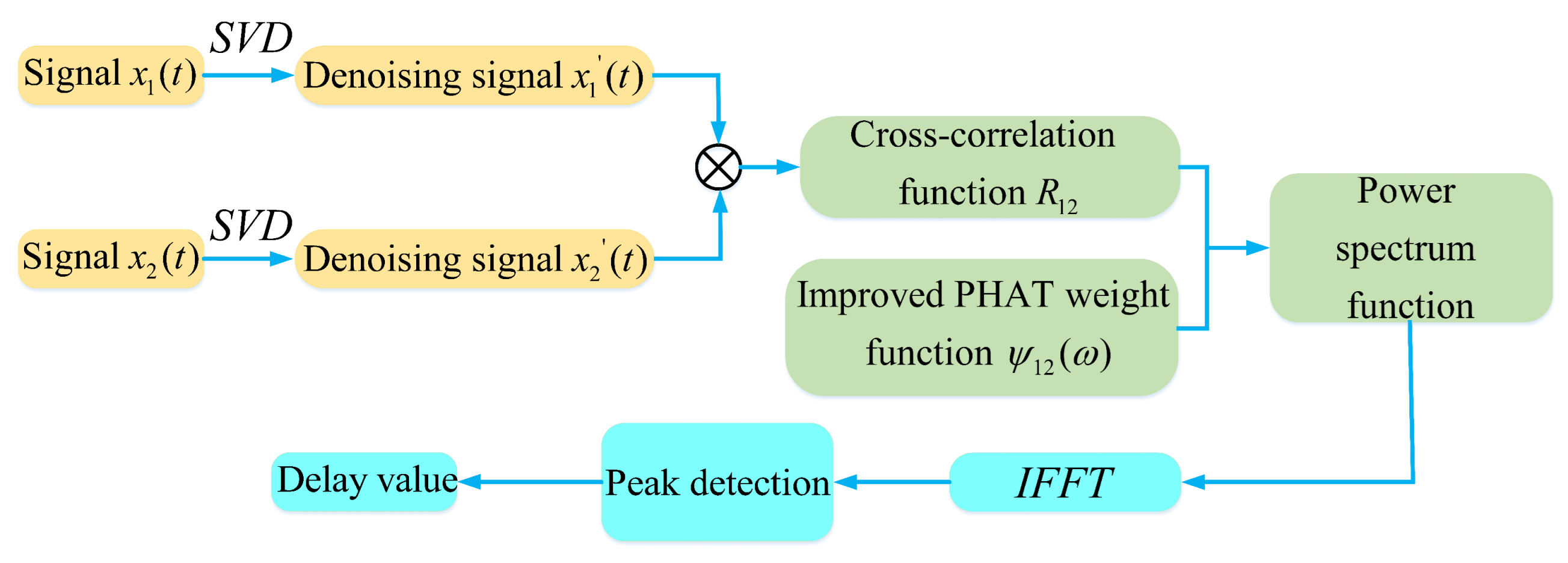
3. Principle of Delay Estimation Optimization Algorithm
- (1)
- Performing singular value decomposition noise reduction processing on the original signals and to obtain denoised signals and ;
- (2)
- Performing cross-correlation on the denoised signals and to obtain the cross-correlation function ;
- (3)
- Using the improved weighting function to process the cross-correlation function, the power spectrum function is obtained;
- (4)
- Performing inverse Fourier transform on the power spectrum function to obtain the generalized cross-correlation time-domain function;
- (5)
- Performing peak detection on the generalized cross-correlation time-domain function to obtain the delay difference.
4. Simulation Analysis of Analog Signals
5. Experiment and Performance Analysis
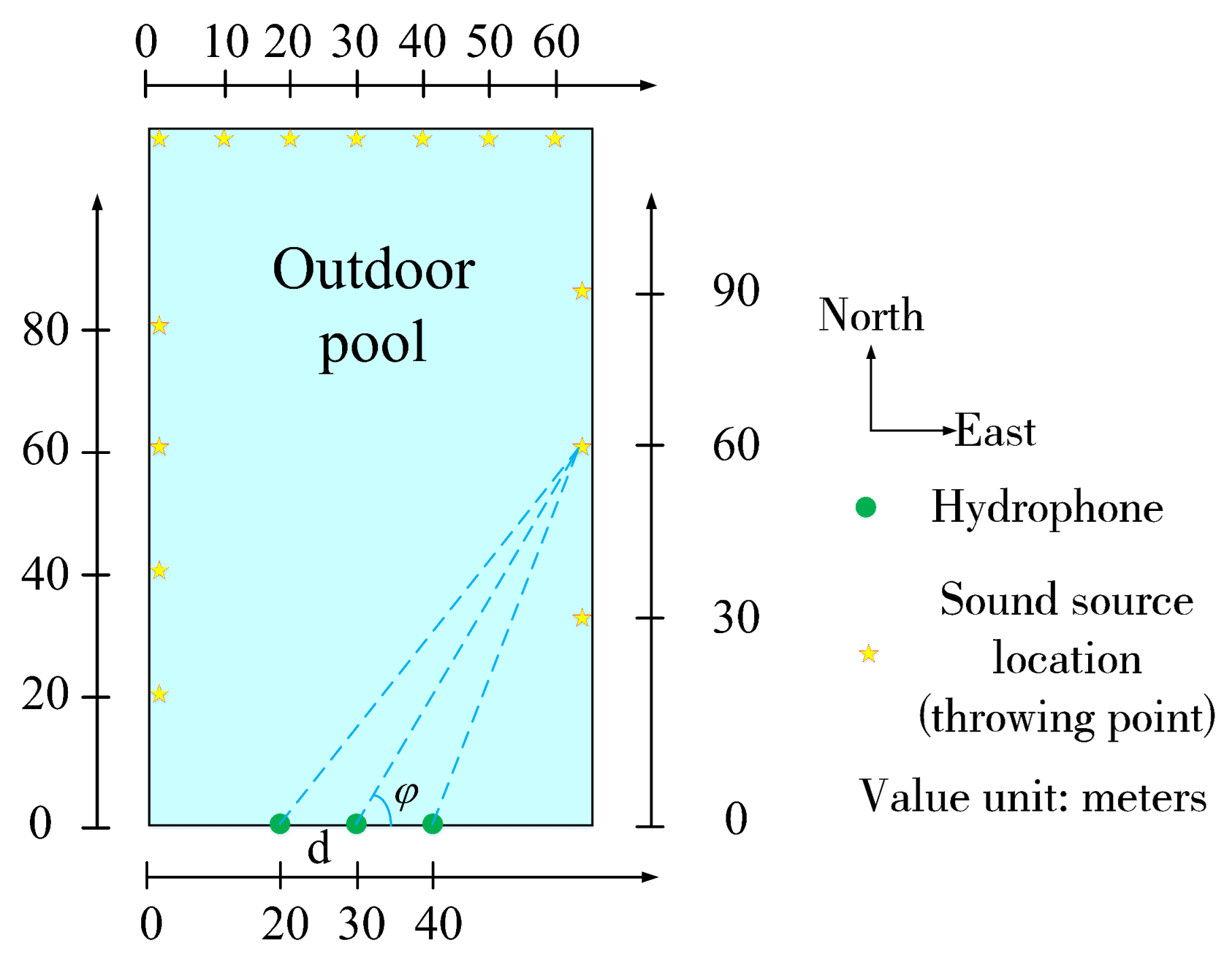
5.1. Experimental System Construction
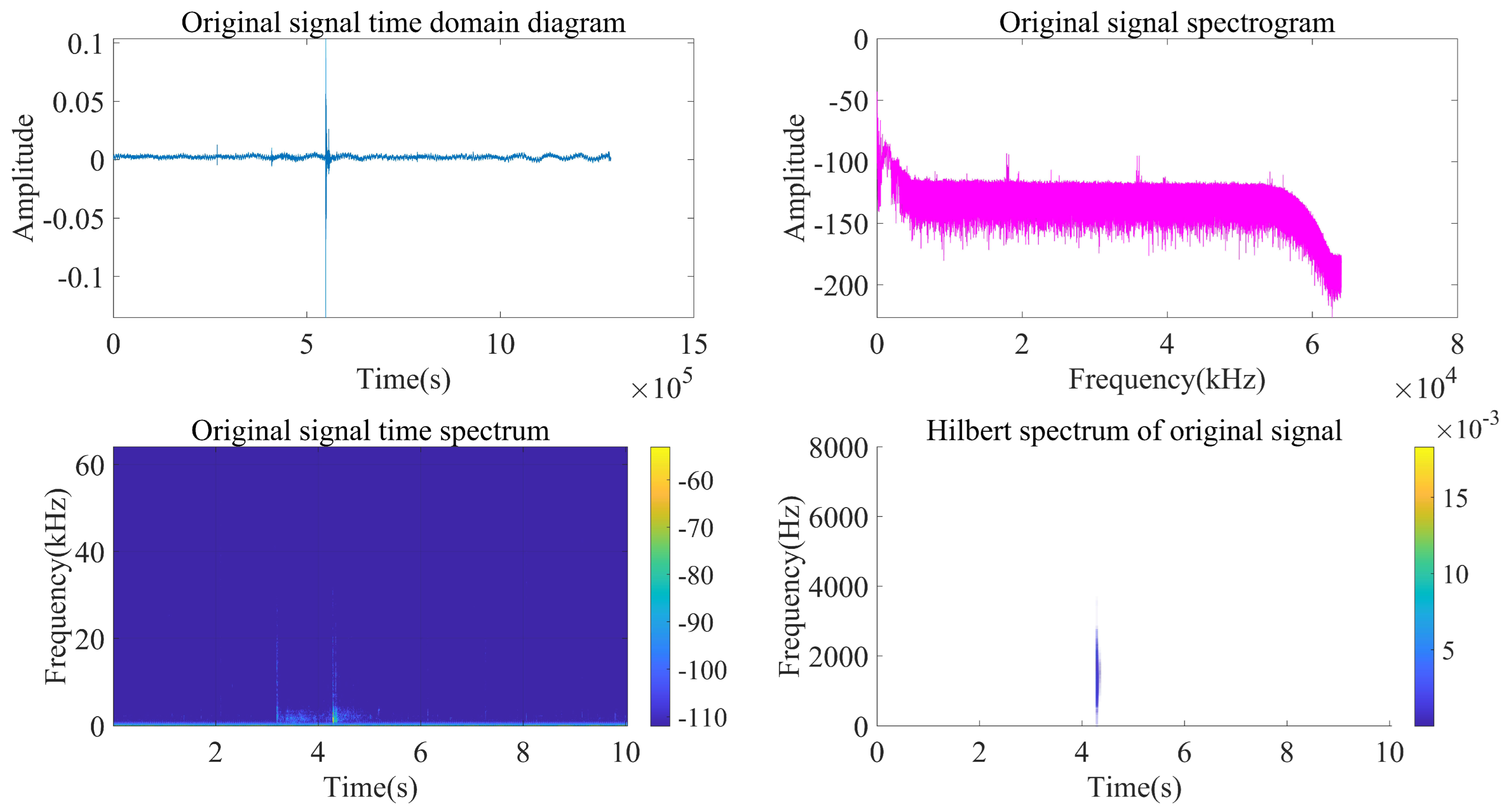
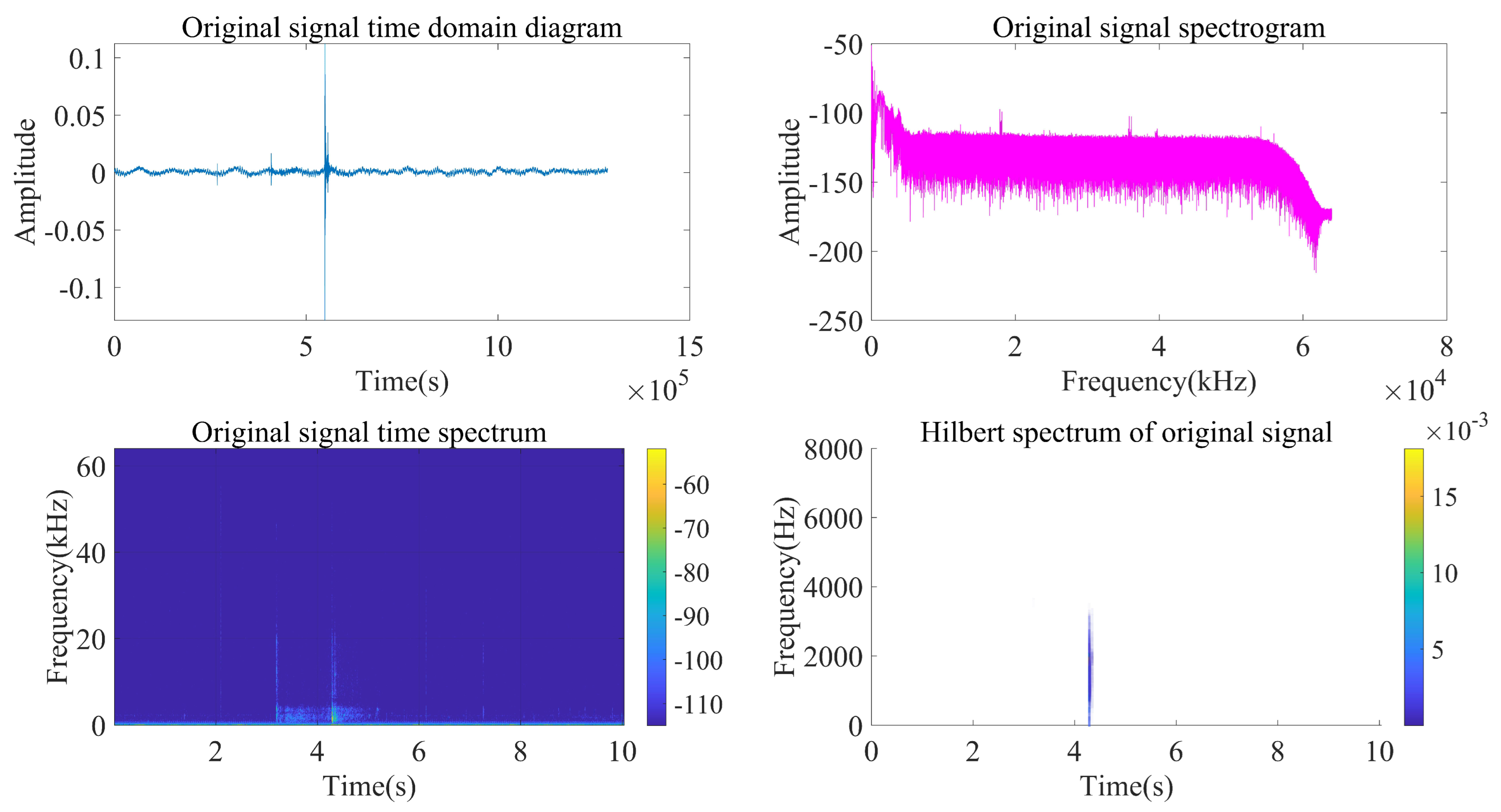
5.2. Experimental Signal Processing
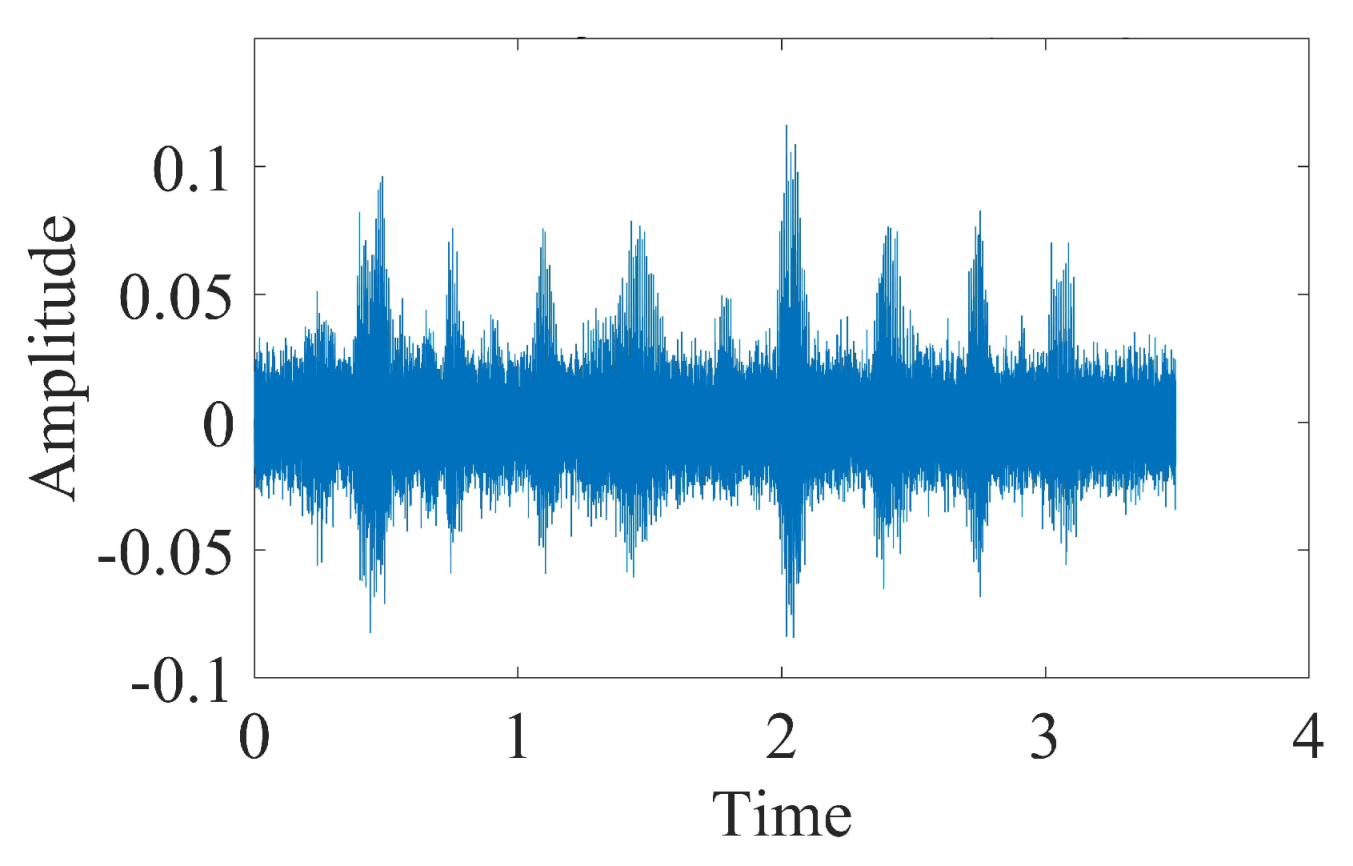
- (1)
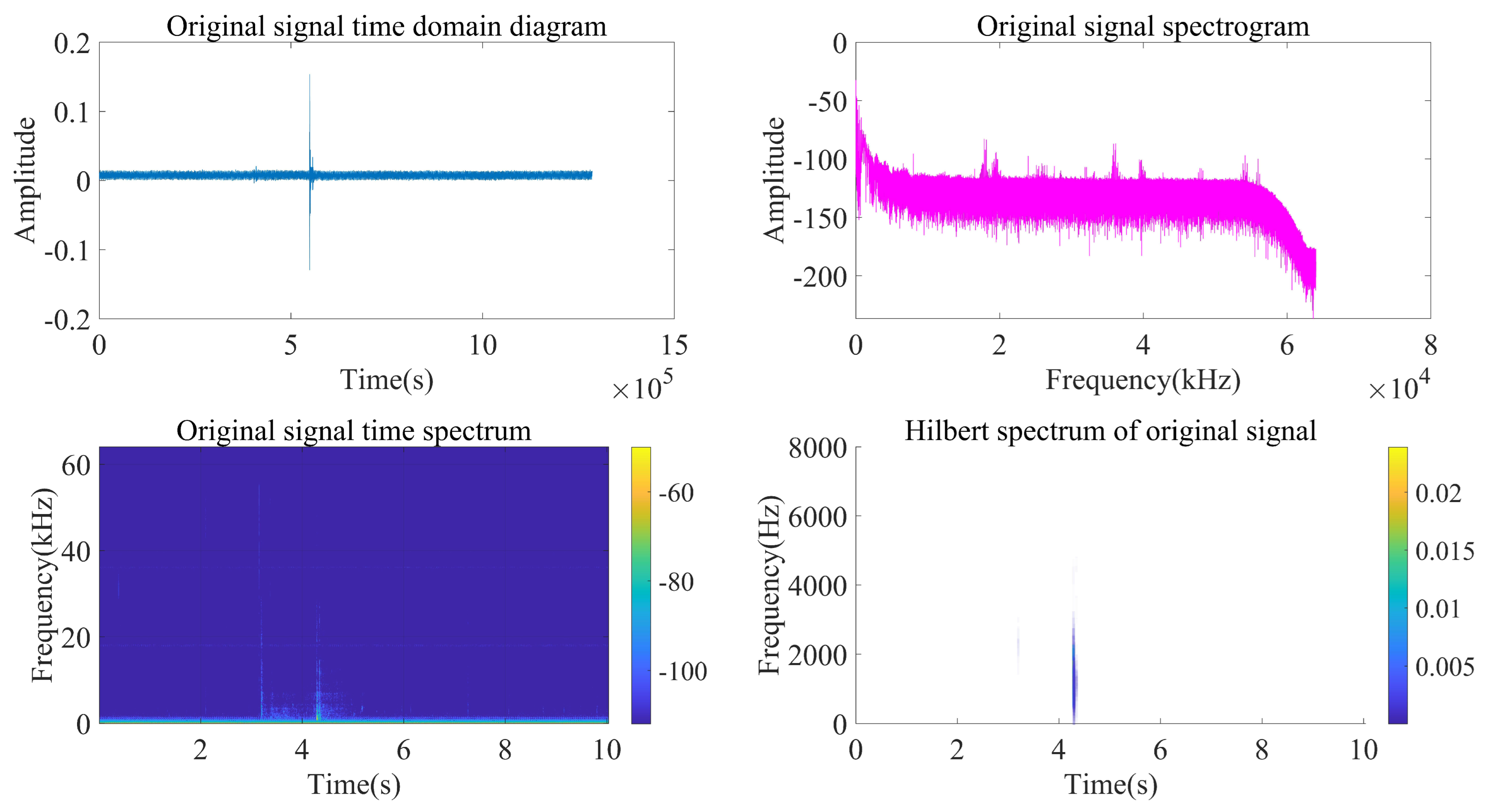
- Firstly, time-frequency domain analysis is performed to analyze the characteristics of the acquired signal;
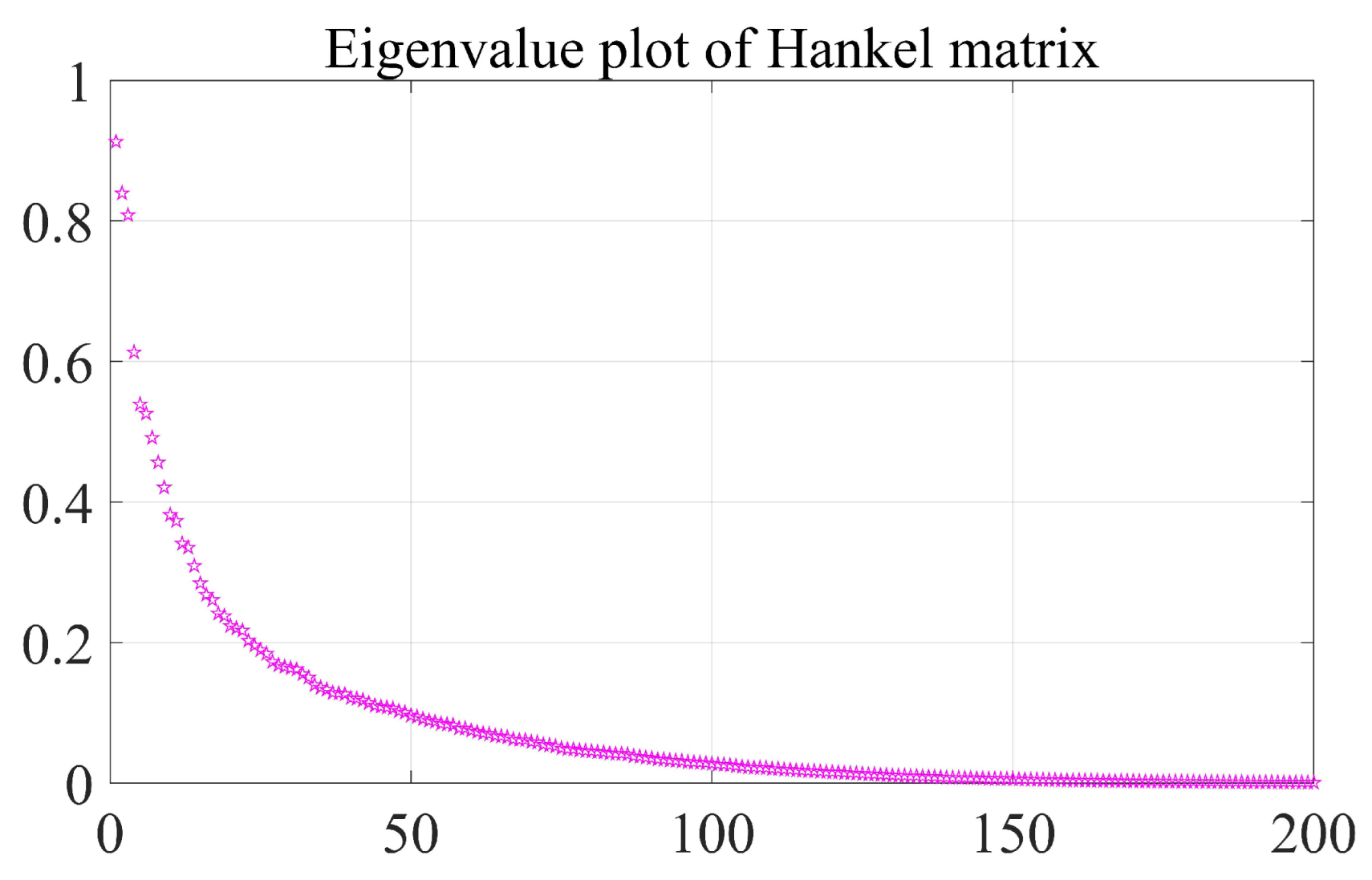
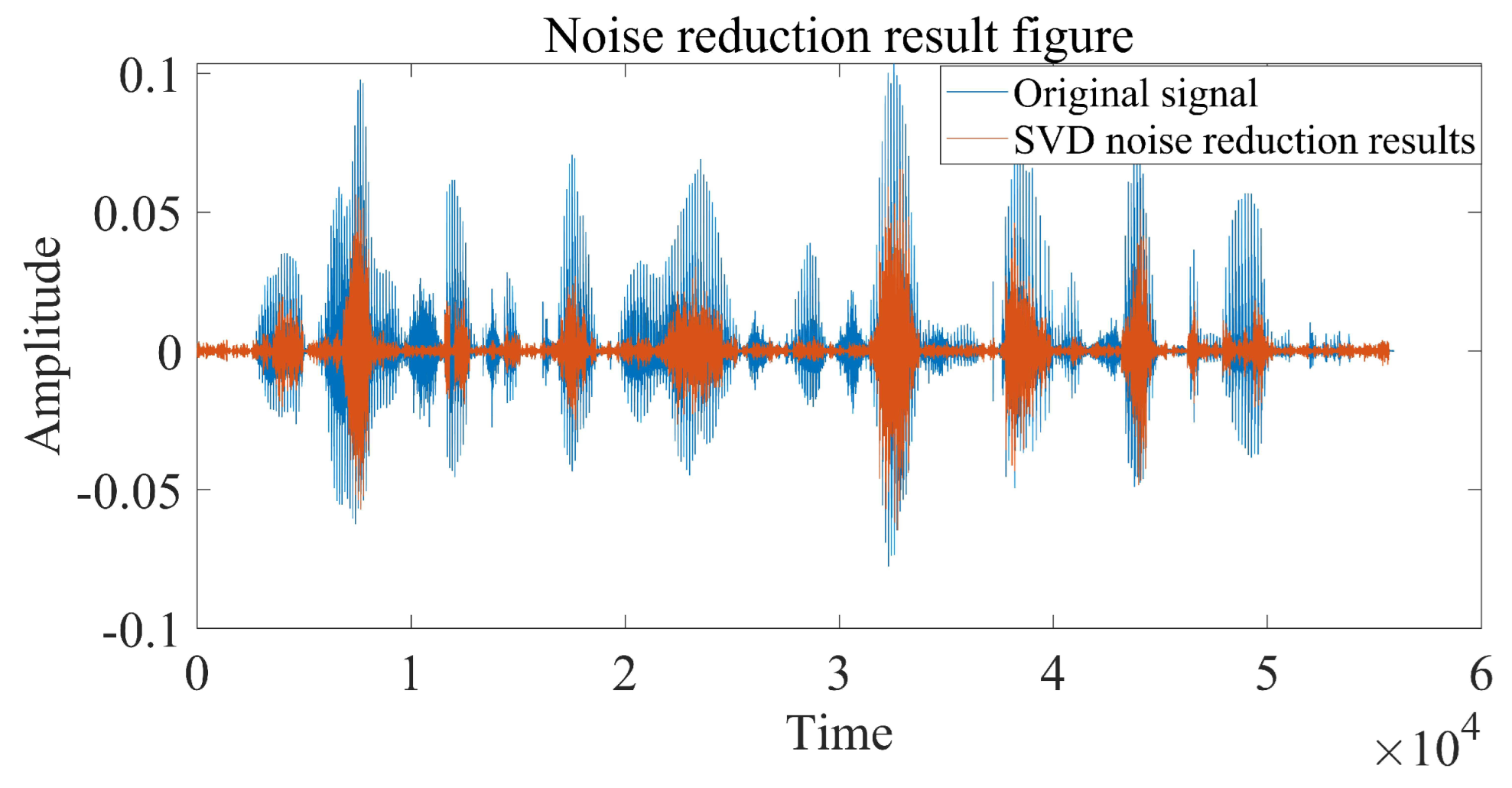
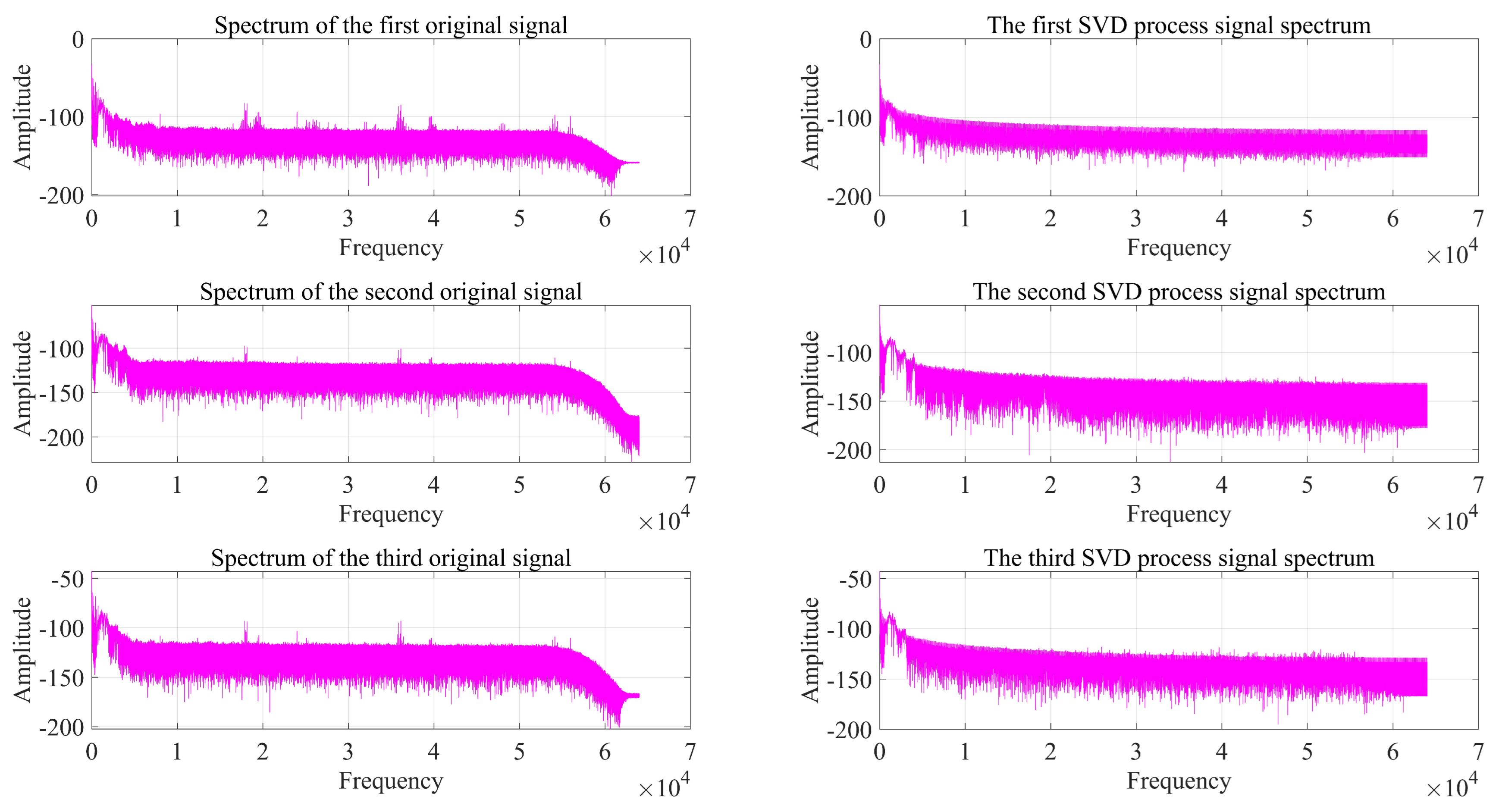
- (2)
- Then, the singular value decomposition process is performed to obtain the denoised signal, and the difference between the acquired signal and the denoised signal is compared, and the reliability and correctness of the singular value decomposition noise reduction are verified by the frequency domain analysis of the denoised signal;
- (3)
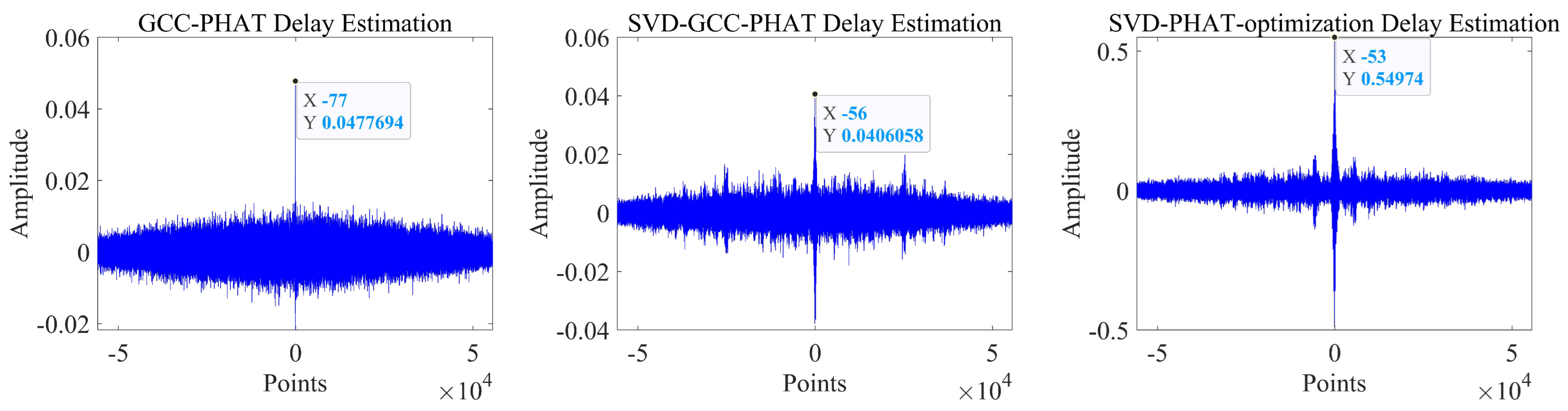
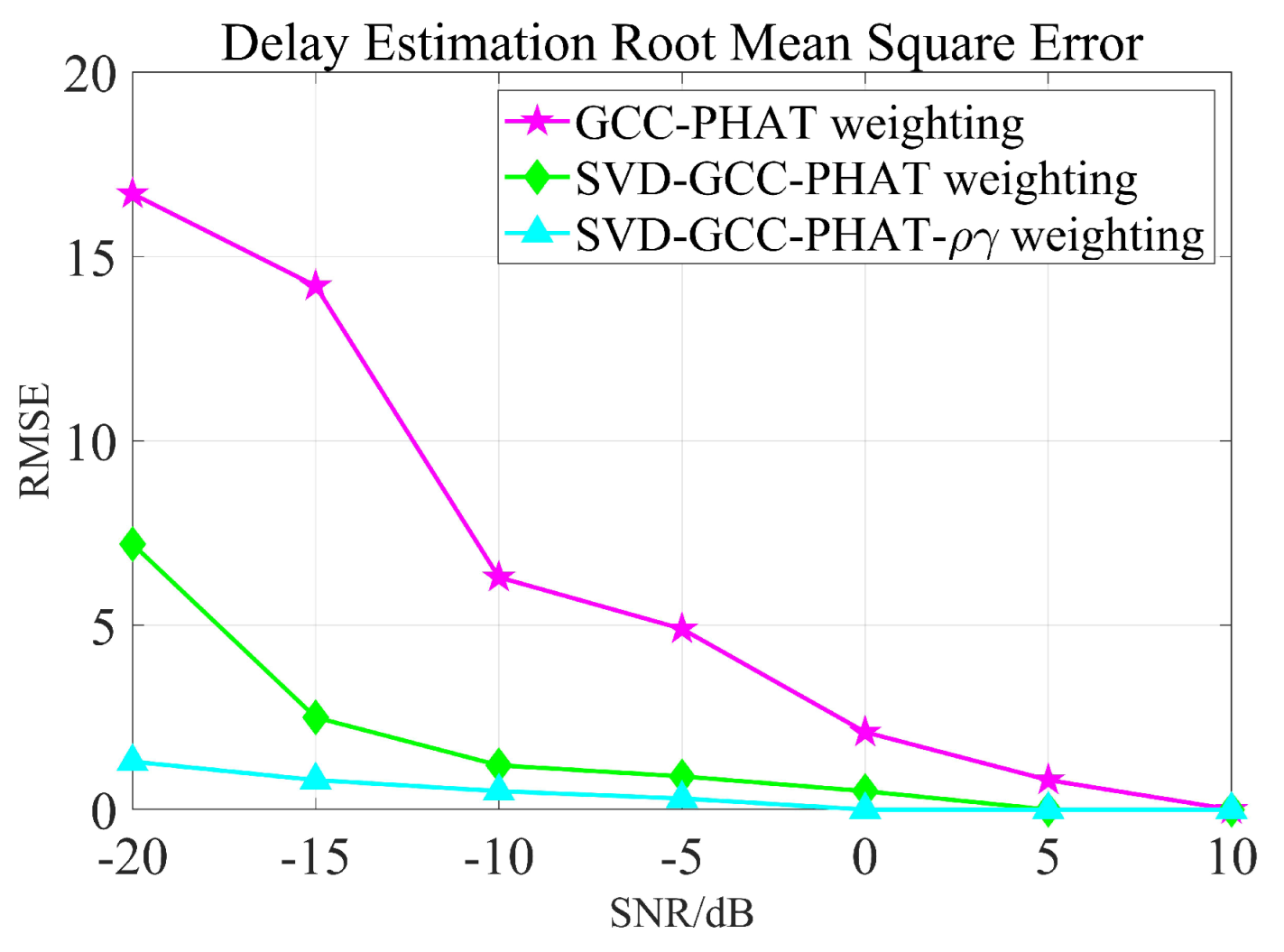
- Finally, based on the GCC-PHAT--weighted delay estimation algorithm, the three-way signal is estimated for pairwise delays, and the delay difference is obtained, which is compared with the theoretical delay difference.
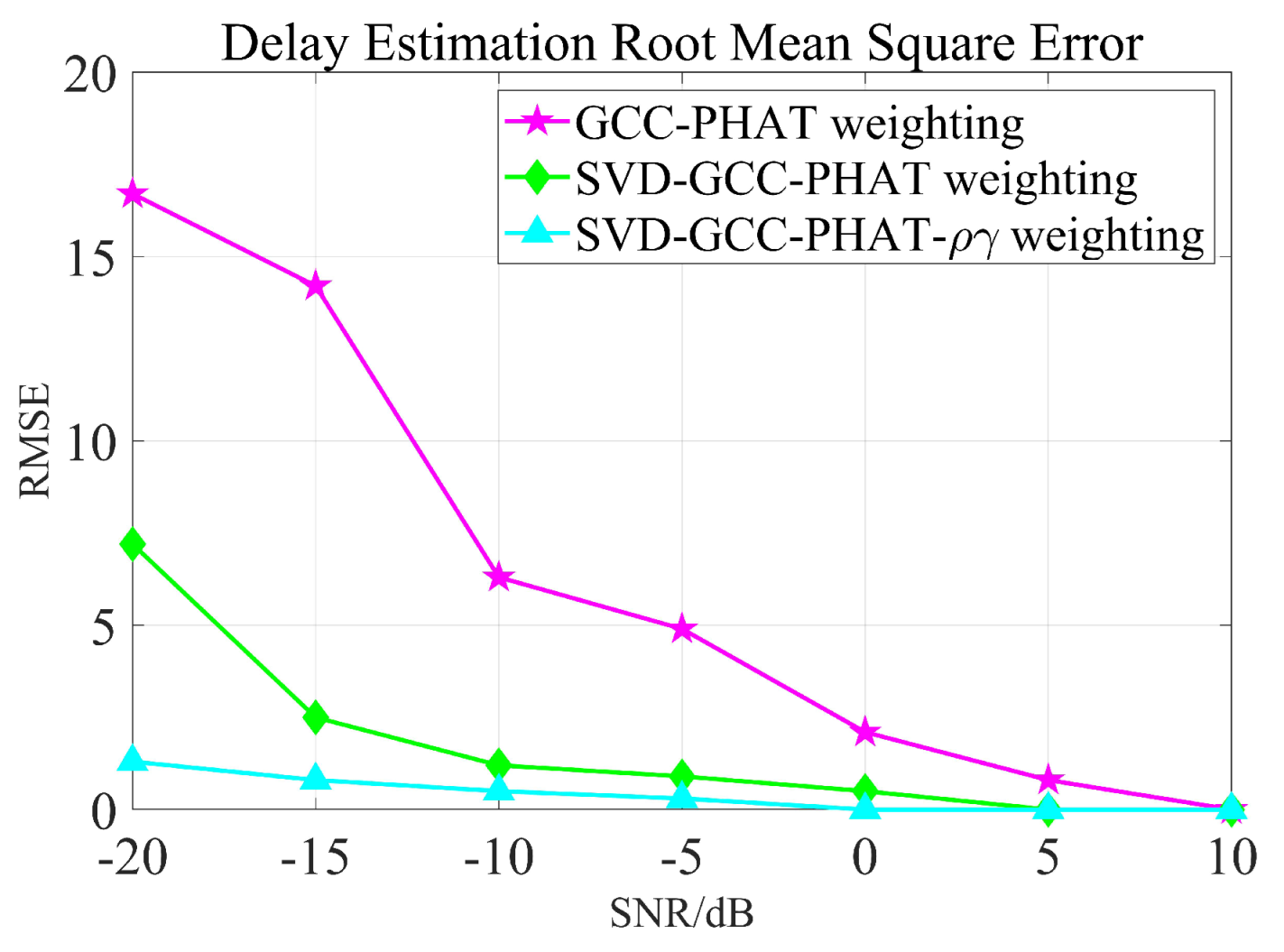
5.3. Algorithm Verification and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.; Liu, J.; Gao, Q.; Ju, Z. Adaptive robust decoupling control of multi-arm space robots using time-delay estimation technique. Nonlinear Dyn. 2020, 100, 2449–2467. [Google Scholar] [CrossRef]
- Kali, Y.; Ayala, M.; Rodas, J.; Saad, M.; Doval-Gandoy, J.; Gregor, R.; Benjelloun, K. Current control of a six-phase induction machine drive based on discrete-time sliding mode with time delay estimation. Energies 2019, 12, 170. [Google Scholar] [CrossRef]
- Mustafa, G.I.Y.; Wang, H.P.; Tian, Y. Vibration control of an active vehicle suspension systems using optimized model-free fuzzy logic controller based on time delay estimation. Adv. Eng. Softw. 2019, 127, 141–149. [Google Scholar] [CrossRef]
- Han, S.; Wang, H.; Tian, Y. Model-free based adaptive nonsingular fast terminal sliding mode control with time-delay estimation for a 12 DOF multi-functional lower limb exoskeleton. Adv. Eng. Softw. 2018, 119, 38–47. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, H.; Tian, Y.; Peyrodie, L.; Wang, X. Model-free based neural network control with time-delay estimation for lower extremity exoskeleton. Neurocomputing 2018, 272, 178–188. [Google Scholar] [CrossRef]
- Ahmed, S.; Wang, H.; Tian, Y. Adaptive high-order terminal sliding mode control based on time delay estimation for the robotic manipulators with backlash hysteresis. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 1128–1137. [Google Scholar] [CrossRef]
- Han, S.; Wang, H.; Tian, Y.; Christov, N. Time-delay estimation based computed torque control with robust adaptive RBF neural network compensator for a rehabilitation exoskeleton. ISA Trans. 2020, 97, 171–181. [Google Scholar] [CrossRef]
- Cobos, M.; Antonacci, F.; Comanducci, L.; Sarti, A. Frequency-sliding generalized cross-correlation: A sub-band time delay estimation approach. IEEE/ACM Trans. Audio Speech Lang. Process. 2020, 28, 1270–1281. [Google Scholar] [CrossRef]
- Wang, Y.; Li, P.; Zhang, J.; Liu, X.; Bai, Q.; Wang, D.; Zhang, M.; Jin, B. Distributed optical fiber vibration sensor using generalized cross-correlation algorithm. Measurement 2019, 144, 58–66. [Google Scholar] [CrossRef]
- Catur, H.A.H.B.B.; Saputra, H.M. Azimuth estimation based on generalized cross correlation phase transform (GCC-PHAT) using Equilateral triangle microphone array. In Proceedings of the 2019 International Conference on Radar, Antenna, Microwave, Electronics, and Telecommunications (ICRAMET), Tangerang, Indonesia, 23–24 October 2019; pp. 89–93. [Google Scholar]
- Lim, J.S.; Cheong, M.J.; Kim, S. Improved generalized cross correlation-phase transform based time delay estimation by frequency domain autocorrelation. J. Acoust. Soc. Korea 2018, 37, 271–275. [Google Scholar]
- Padois, T.; Doutres, O.; Sgard, F. On the use of modified phase transform weighting functions for acoustic imaging with the generalized cross correlation. J. Acoust. Soc. Am. 2019, 145, 1546–1555. [Google Scholar] [CrossRef] [PubMed]
- Glentis, G.O.; Angelopoulos, K. Using Generalized Cross-Correlation estimators for leak signal velocity estimation and spectral region of operation selection. In Proceedings of the 2022 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Ottawa, ON, Canada, 16–19 May 2022; pp. 1–6. [Google Scholar]
- Lim, J.S.; Kim, S. Study on the pre-processors to improve the generalized-cross-correlation based time delay estimation under the narrow band single tone signal environments. J. Acoust. Soc. Korea 2020, 39, 207–215. [Google Scholar]
- Ye, D.; Lu, J.Y.; Zhu, X.J.; Lin, H. Generalized cross corre-lation time delay estimation based on improved waveletthreshold function. In Proceedings of the 2016 Sixth International Confer-ence on Instrumentation & Measurement, Computer, Communication and Control, Harbin, China, 21–23 July 2016; pp. 629–633. [Google Scholar]
- Zhang, X.; Lei, X.; Liu, Q. Wheel/Rail Force Signal Denoising Based on Wavelet Packet and Improved EMD. Noise Vib. Control 2016, 36, 104–107. [Google Scholar]
- Zhou, Z.; Sun, S.; Li, Y.; Chen, P.; Shen, J. Second correlation time delay estimation based on empirical mode de-composition reconstruction. Telecommun. Eng. 2016, 56, 562–567. [Google Scholar]
- Wei, W.; Mao, Y. Cross-correlation delay estimation optimization algorithm based on singular value decomposition. Electron. Meas. Technol. 2020, 43, 52–56. [Google Scholar]
- Zhang, Y.; Yan, T.; Yang, Z. Generalized Cross Correlation Time Delay Estimation Based on Singular Value Decomposition. J. Lanzhou Jiaotong Univ. 2017, 36, 47–51. [Google Scholar]
- Zhang, C.; Liu, L.; Wei, J.; Tang, Q.; Wang, N.; Ji, H. Time delay estimation simulation of robot fish obstacle avoidance based on PHAT-β generalized cross-correlation in the transformer. Sci. Technol. Eng. 2021, 21, 6354–6360. [Google Scholar]
- Fokin, G.; Kireev, A.; Al-odhari, A.H.A. TDOA positioning accuracy performance evaluation for arc sensor configuration. In Proceedings of the 2018 Systems of Signals Generating and Processing in the Field of on Board Communications, Moscow, Russia, 14–15 March 2018; pp. 1–5. [Google Scholar]
- Xiong, W.; Schindelhauer, C.; So, H.C.; Bordoy, J.; Gabbrielli, A.; Liang, J. TDOA-based localization with NLOS mitigation via robust model transformation and neurodynamic optimization. Signal Process. 2021, 178, 107774. [Google Scholar] [CrossRef]
- Wu, R.; Zhang, Y.; Huang, Y.; Xiong, J.; Deng, Z. A novel long-time accumulation method for double-satellite TDOA/FDOA interference localization. Radio Sci. 2018, 53, 129–142. [Google Scholar] [CrossRef]
- Schanze, T. Compression and noise reduction of biomedical signals by singular value decomposition. IFAC-PapersOnLine 2018, 51, 361–366. [Google Scholar] [CrossRef]
- Govindarajan, S.; Subbaiah, J.; Cavallini, A.; Krithivasan, K.; Jayakumar, J. Partial discharge random noise removal using Hankel matrix-based fast singular value decomposition. IEEE Trans. Instrum. Meas. 2019, 69, 4093–4102. [Google Scholar] [CrossRef]
- Li, H.; Liu, T.; Wu, X.; Chen, Q. A bearing fault diagnosis method based on enhanced singular value decomposition. IEEE Trans. Ind. Inform. 2020, 17, 3220–3230. [Google Scholar] [CrossRef]
- Liang, X.; Li, Y.; Zhang, C. Noise suppression for microseismic data by non-subsampled shearlet transform based on singular value decomposition. Geophys. Prospect. 2018, 66, 894–903. [Google Scholar] [CrossRef]
- Liu, H.; Dong, H.; Ge, J.; Liu, Z.; Yuan, Z.; Zhu, J.; Zhang, H. A fusion of principal component analysis and singular value decomposition based multivariate denoising algorithm for free induction decay transversal data. Rev. Sci. Instrum. 2019, 90, 035116. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Liu, T.; Wu, X.; Chen, Q. Research on bearing fault feature extraction based on singular value decomposition and optimized frequency band entropy. Mech. Syst. Signal Process. 2019, 118, 477–502. [Google Scholar] [CrossRef]
- Xu, X.; Luo, M.; Tan, Z.; Pei, R. Echo signal extraction method of laser radar based on improved singular value decomposition and wavelet threshold denoising. Infrared Phys. Technol. 2018, 92, 327–335. [Google Scholar] [CrossRef]
- Zhong, J.; Bi, X.; Shu, Q.; Chen, M.; Zhou, D.; Zhang, D. Partial discharge signal denoising based on singular value decomposition and empirical wavelet transform. IEEE Trans. Instrum. Meas. 2020, 69, 8866–8873. [Google Scholar] [CrossRef]
- Devi, H.S.; Singh, K.M. Red-cyan anaglyph image watermarking using DWT, Hadamard transform and singular value decomposition for copyright protection. J. Inf. Secur. Appl. 2020, 50, 102424. [Google Scholar] [CrossRef]
- Villadangos, J.M.; Ureña, J.; García-Domínguez, J.J.; Jiménez-Martín, A.; Hernández, Á.; Pérez-Rubio, M.C. Dynamic adjustment of weighted gcc-phat for position estimation in an ultrasonic local positioning system. Sensors 2021, 21, 7051. [Google Scholar] [CrossRef]
- Padois, T.; Doutres, O.; Nelisse, H.; Sgard, F. Acoustic imaging using different weighting functions with the generalized cross correlation based on the generalized mean. In Proceedings of the 26th International Congress on Sound and Vibration, Montreal, QC, Canada, 7–11 July 2019. [Google Scholar]
- Yang, X.; Bao, C.; Cui, Z. Weighting function modification used for phase transform-based time delay estimation. China Commun. 2022. [Google Scholar] [CrossRef]
- Tan, C.S.; Mohd-Mokhtar, R.; Arshad, M.R. Improved Generalized Cross Correlation Phase Transform Algorithm for Time Difference of Arrival Estimation. In Proceedings of the 10th National Technical Seminar on Underwater System Technology 2018; Springer: Singapore, 2019; pp. 315–322. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | RMSE | SNR |
|---|---|---|
| Singular value difference spectrum method | 0.6722 | 2.8962 |
| Feature mean method | 0.2487 | 11.5337 |
| Singular value median method | 0.1429 | 16.3440 |
| Method | |||
|---|---|---|---|
| Theoretical delay value | |||
| GCC-PHAT weighting | |||
| SVD-GCC-PHAT weighting | |||
| SVD-GCC-PHAT- weighting |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Li, Z.; Wang, P.; Chen, H. Optimization Algorithm for Delay Estimation Based on Singular Value Decomposition and Improved GCC-PHAT Weighting. Sensors 2022, 22, 7254. https://doi.org/10.3390/s22197254
Wang S, Li Z, Wang P, Chen H. Optimization Algorithm for Delay Estimation Based on Singular Value Decomposition and Improved GCC-PHAT Weighting. Sensors. 2022; 22(19):7254. https://doi.org/10.3390/s22197254
Chicago/Turabian StyleWang, Shizhe, Zongji Li, Pingbo Wang, and Huadong Chen. 2022. "Optimization Algorithm for Delay Estimation Based on Singular Value Decomposition and Improved GCC-PHAT Weighting" Sensors 22, no. 19: 7254. https://doi.org/10.3390/s22197254
APA StyleWang, S., Li, Z., Wang, P., & Chen, H. (2022). Optimization Algorithm for Delay Estimation Based on Singular Value Decomposition and Improved GCC-PHAT Weighting. Sensors, 22(19), 7254. https://doi.org/10.3390/s22197254