
Fuzzy-Assisted Mobile Edge Orchestrator and SARSA Learning for Flexible Offloading in Heterogeneous IoT Environment




Abstract
:1. Introduction
- We aim to improve the rate of successfully executing offloaded tasks and to minimize the processing latency by determining the server at which the task should be offloaded, such as a cloud server, local edge server, or the best neighboring edge server, via a decision-maker.
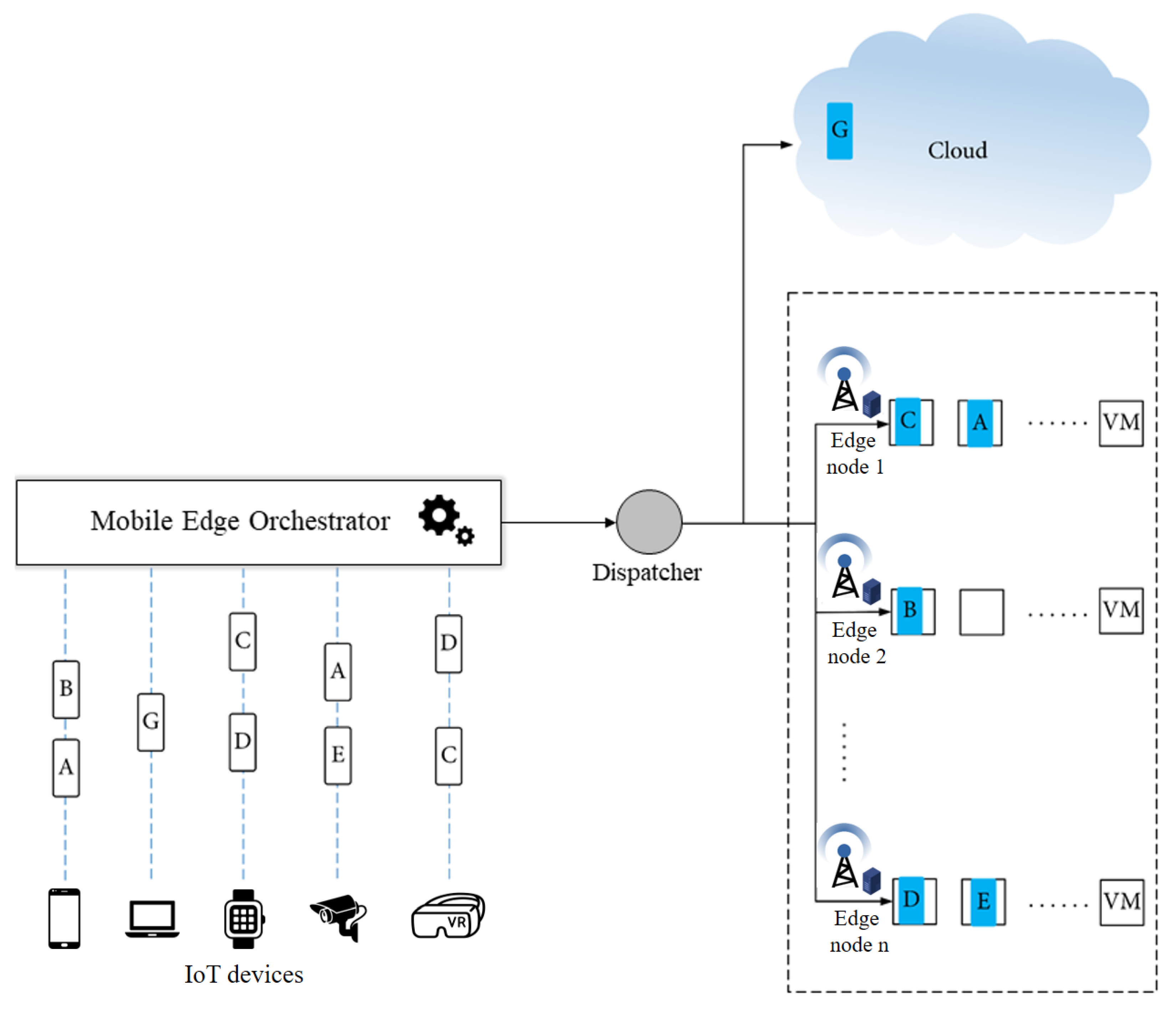
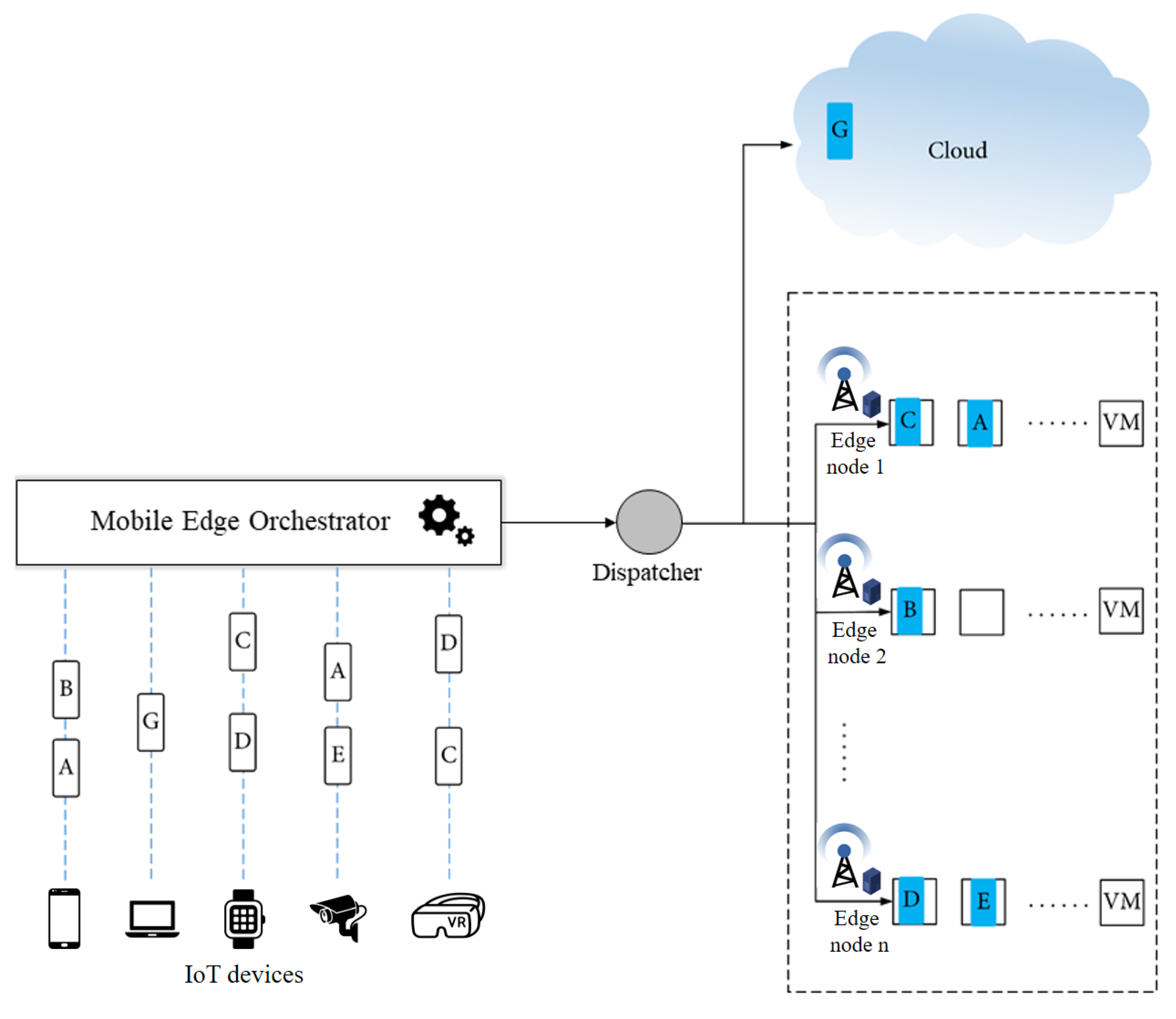
- We define the MEO as a decision-maker for flexible task offloading in the system. The MEO manages the topology of the network and decides where the task will be executed. The MEO performs allocations in the MAN of the network.
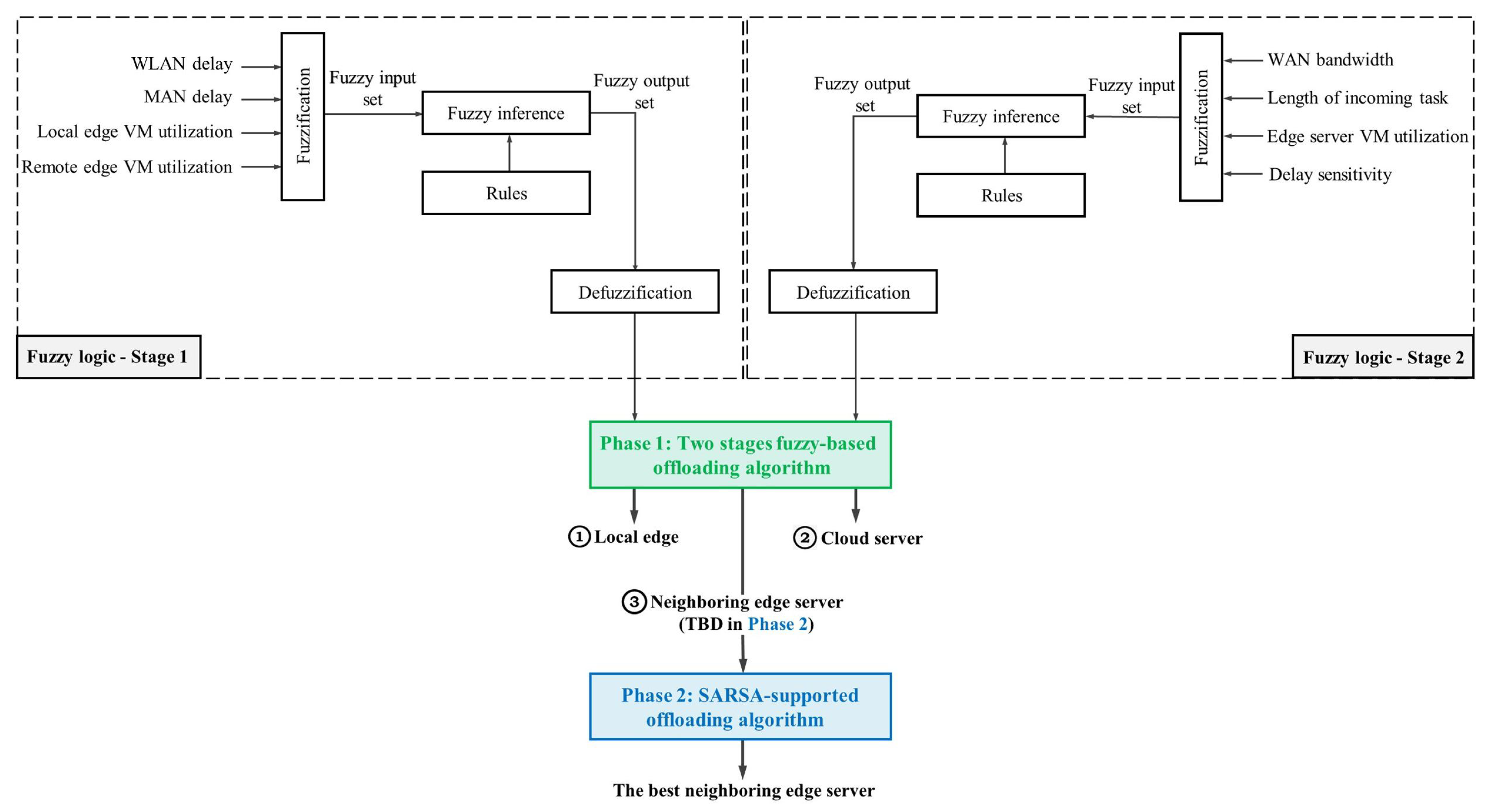
- A collaboration algorithm between the fuzzy logic and SARSA techniques is proposed for optimizing the offloading decisions, which we call the Fu-SARSA algorithm. Fu-SARSA includes two phases: (i) the fuzzy logic phase and (ii) the SARSA phase. The fuzzy logic phase determines whether the task should be offloaded to a cloud server, local edge server, or neighboring edge server. If the MEO chooses the neighboring edge server to execute that task, the choice of the best neighboring edge server is considered in the SARSA phase.
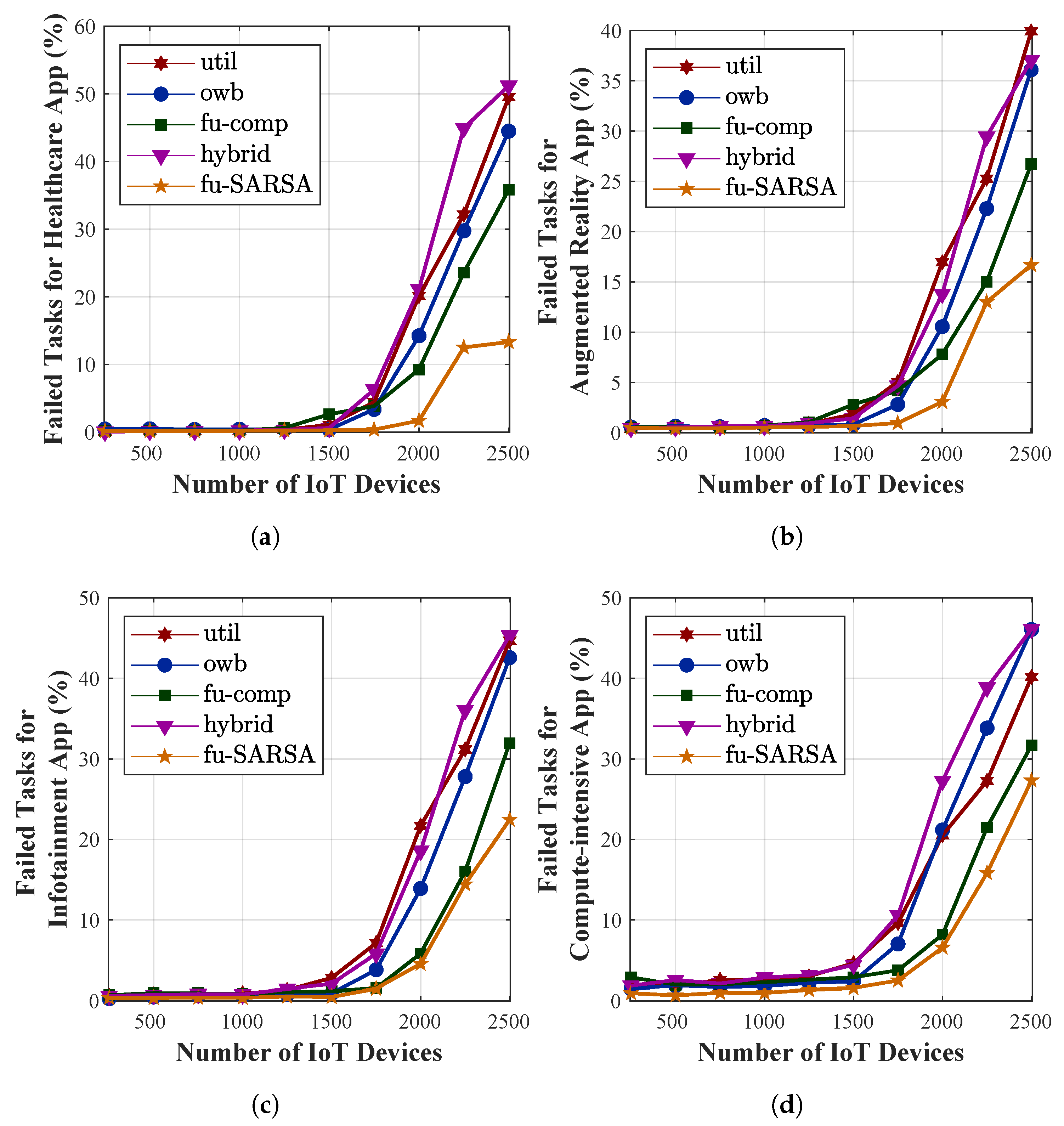
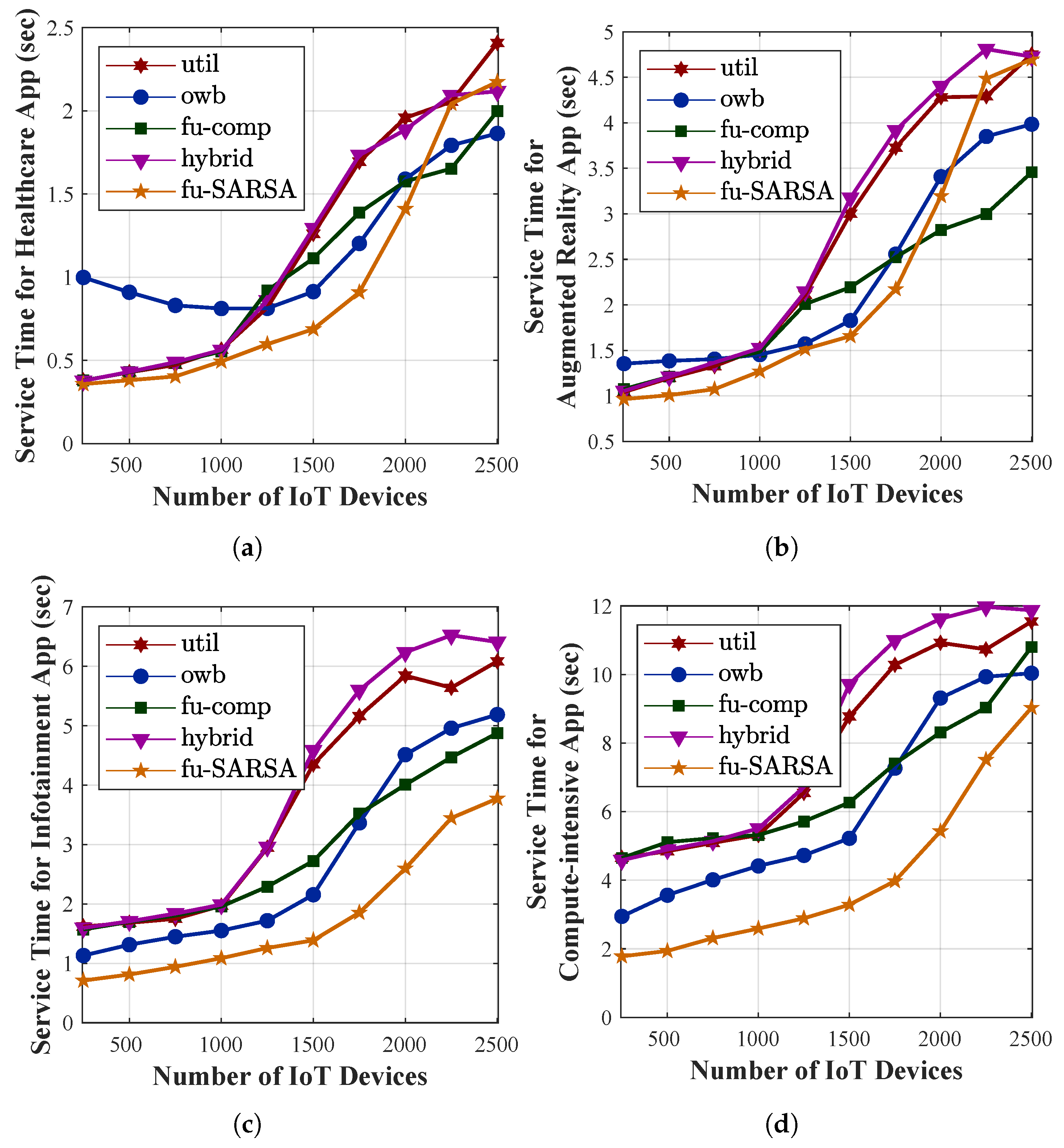
- To model the incoming task requests, we consider four groups of applications: healthcare, AR, infotainment, and compute-intensive applications. They have dissimilar characteristics, such as their task length, delay sensitivity, and resource consumption. We compare and evaluate the results with four opponent algorithms, considering typical performance aspects such as the rate of task failure, service time, and VM utilization.
- Performance evaluations demonstrate the effectiveness of Fu-SARSA, which showed better results compared to the other algorithms.
2. Related Work
3. System Model and Overview of the Fu-SARSA Algorithm
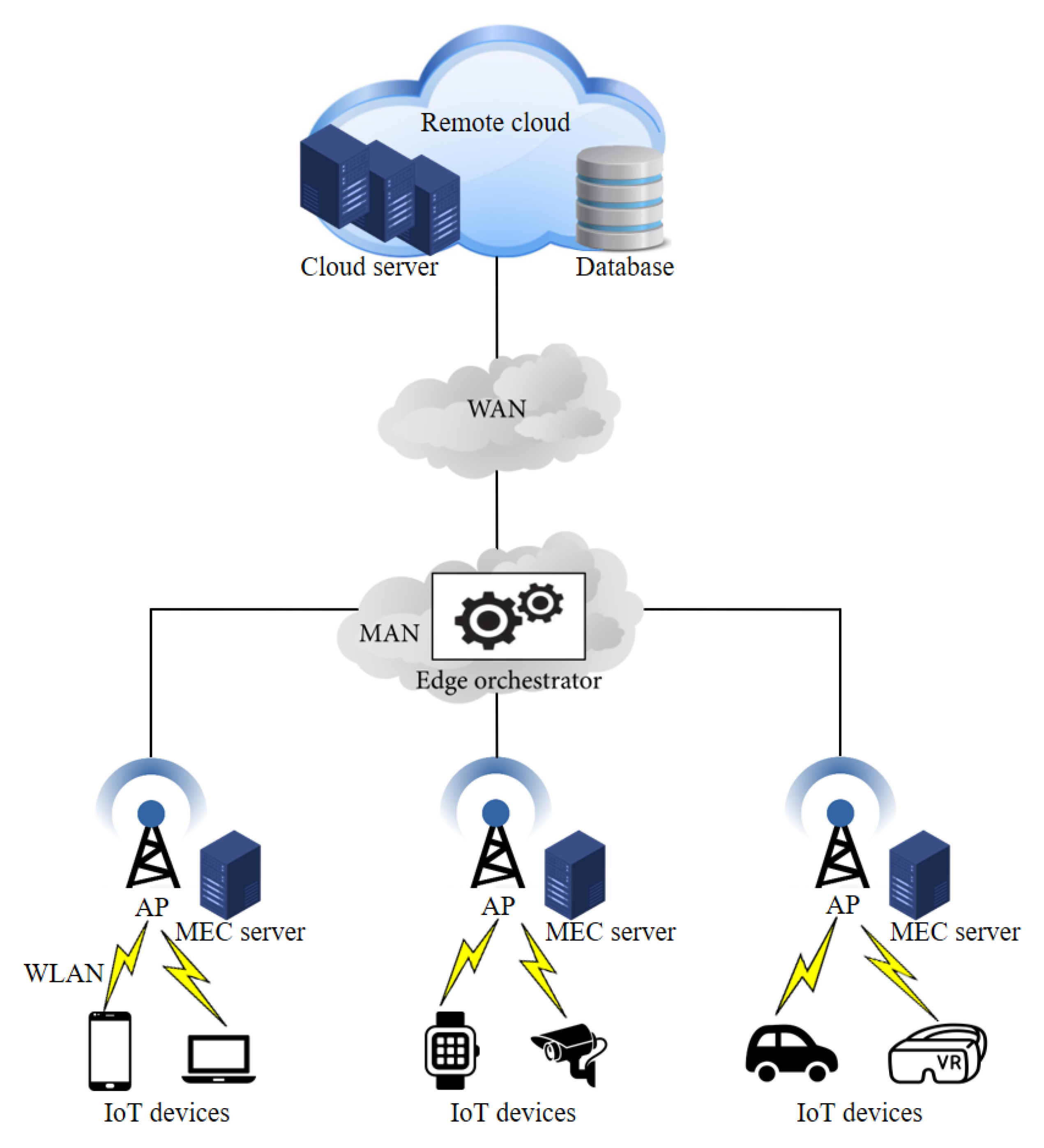
3.1. System Model
3.2. Overview of Fu-SARSA Algorithm
3.2.1. Fuzzy Logic Phase
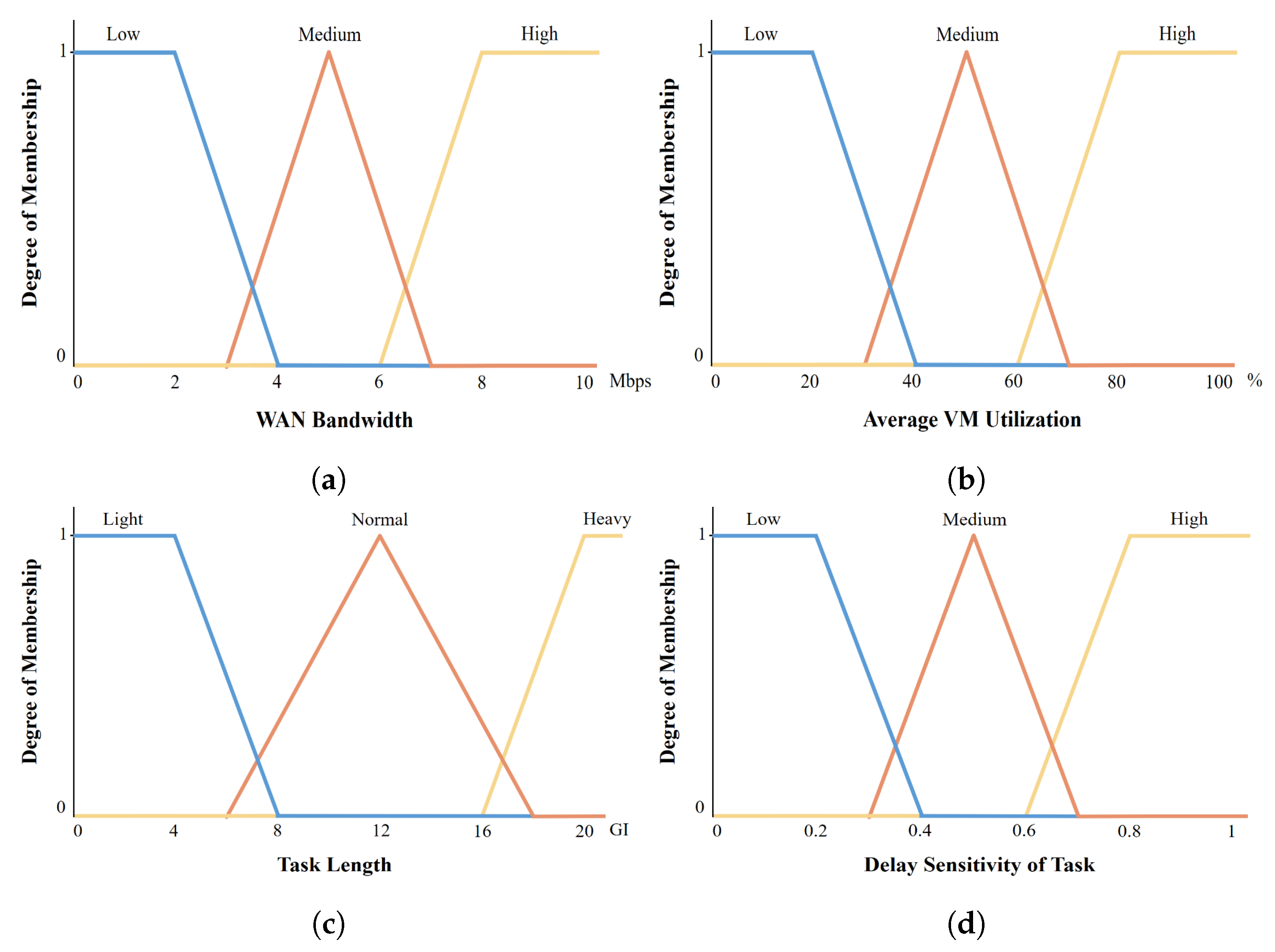
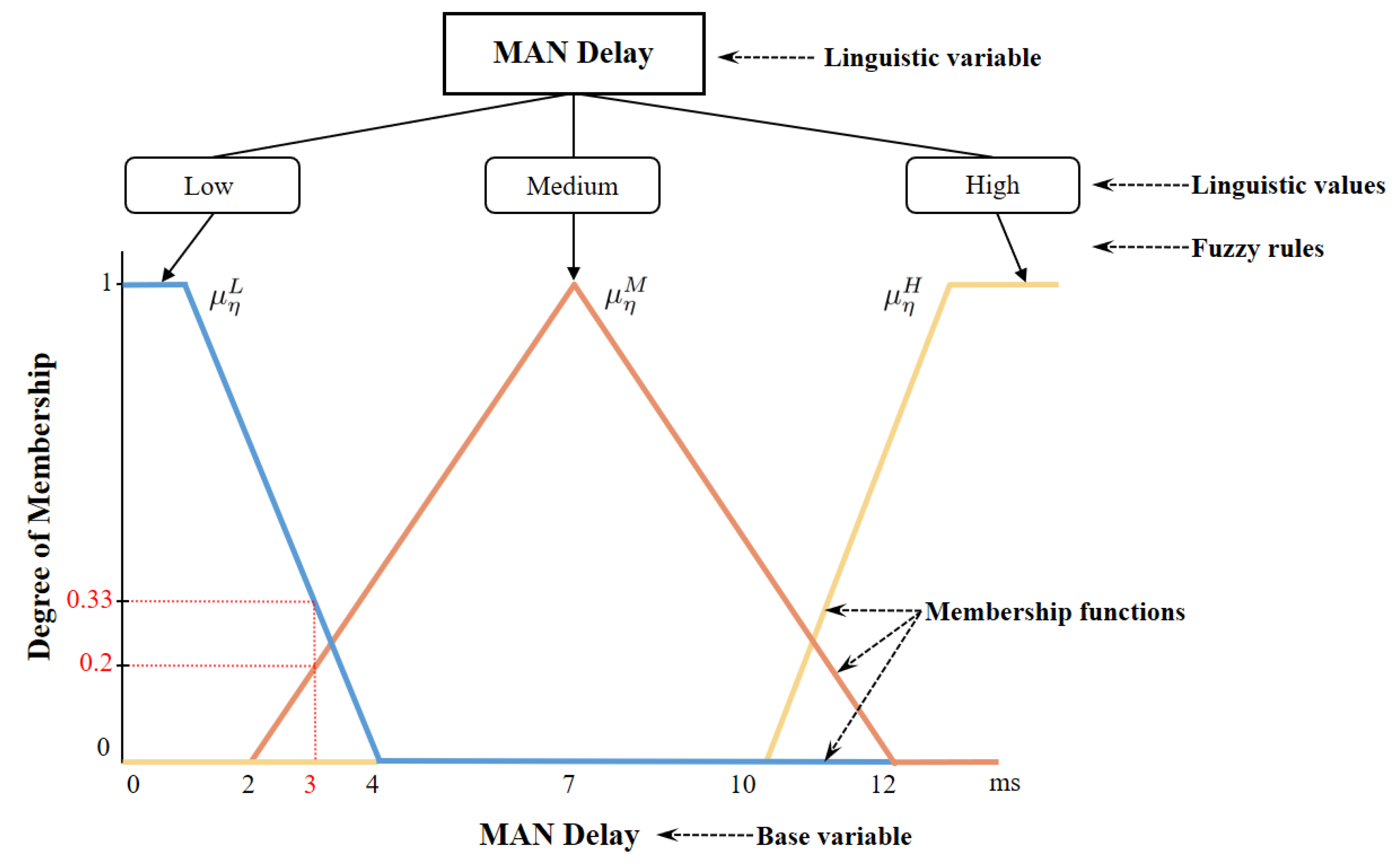
- In the fuzzification step, the crisp input set is transformed into fuzzified sets. The crisp variable is mapped to the linguistic variable. The linguistic variable can be split into linguistic terms. The membership functions are used to determine each linguistic term’s value.
- In the fuzzy inference step, the inference engine interprets the fuzzy input set based on the fuzzy rule collection to create the fuzzy output set.
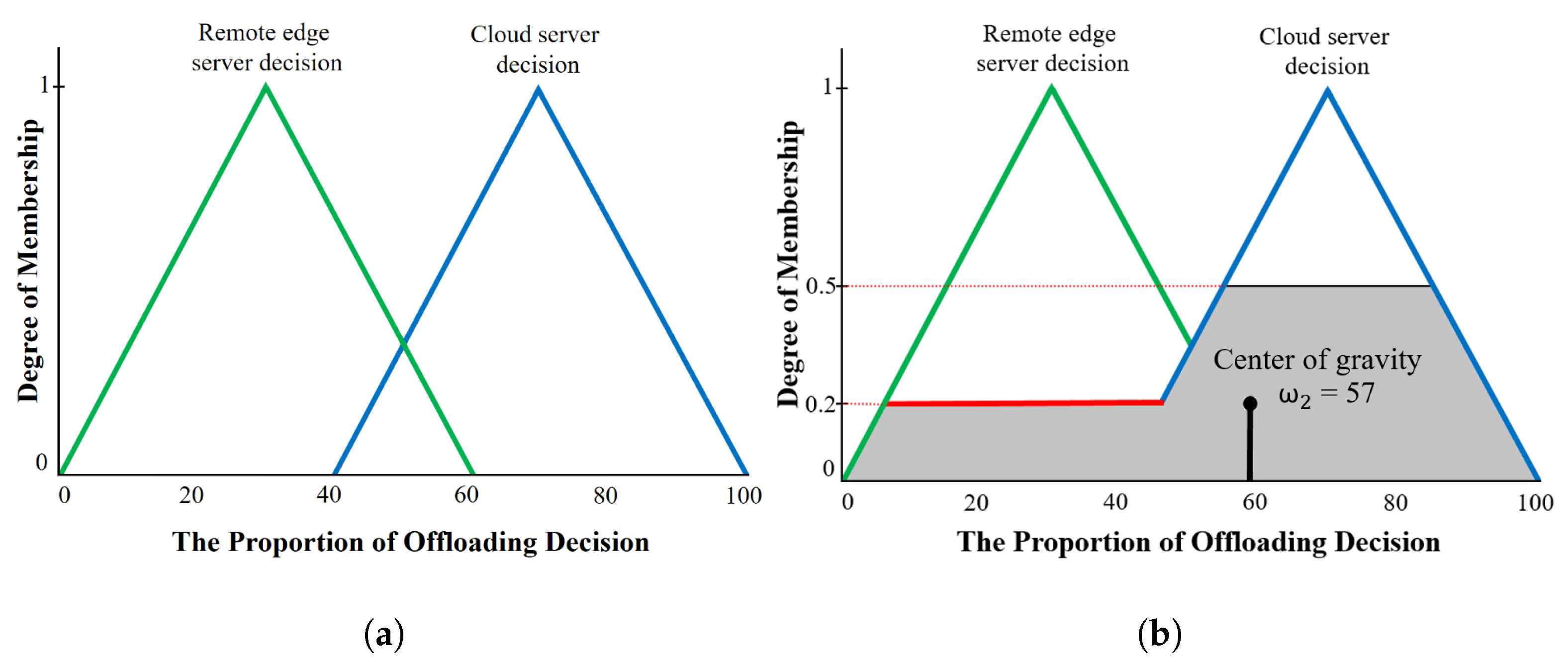
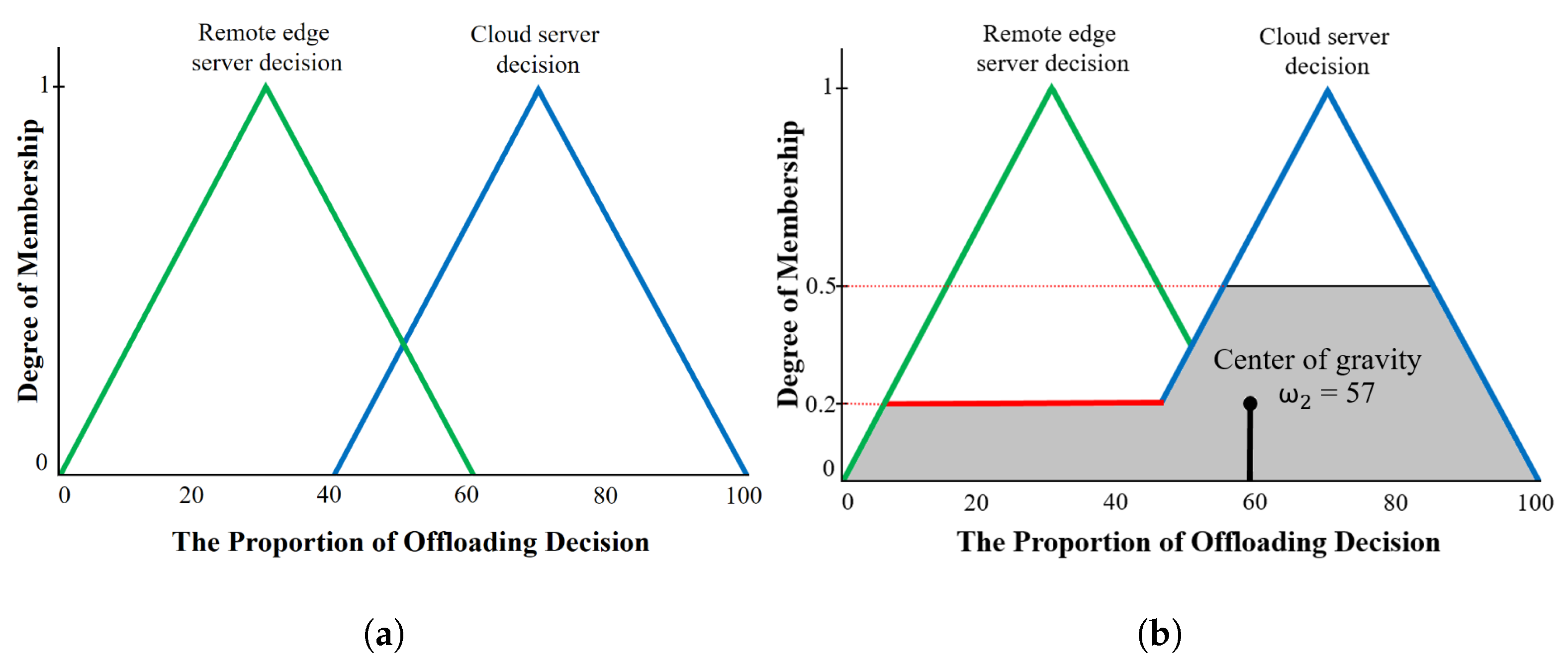
- In the final step, defuzzification obtains a single value from the fuzzy inference results. This process may be carried out by applying any defuzzification method.
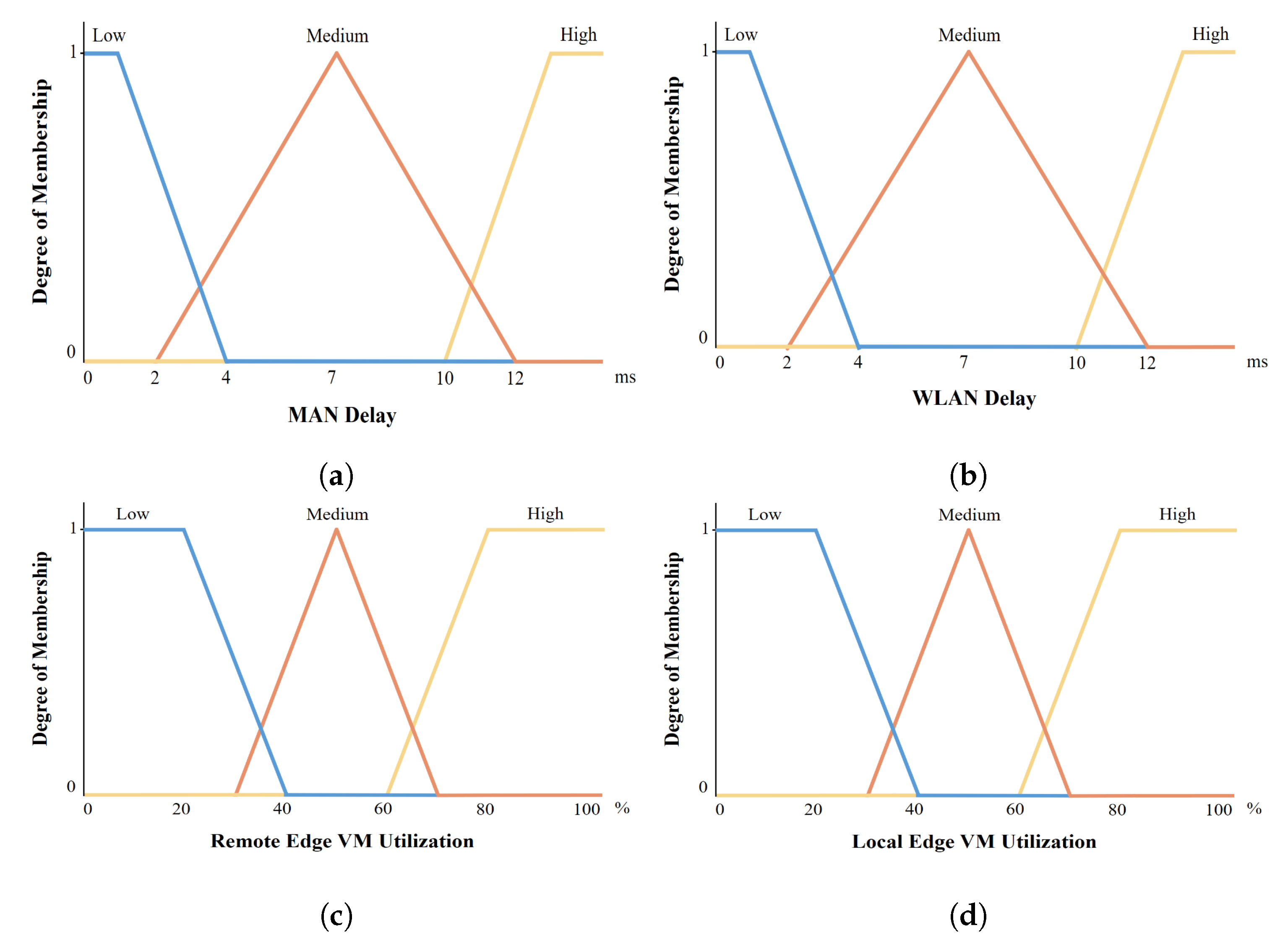
- WLAN delay: The parameter of WLAN delay needs to be considered, since the first tier of the network is covered by WLAN.
- MAN delay: To decide whether the task should be offloaded to the local edge server or the remote edge server, the parameter of MAN delay needs to be considered. If the MAN resources are packed due to the numerous requests to edge servers, the local edge server is more advantageous for offloading.
- Local edge VM utilization: The shortage of computational resources in the local edge server may cause offloading failure; therefore, local edge VM utilization is taken into account. Since the generated tasks are not evenly distributed, there must be some edge servers with excess resources, whereas the others have no resource capability for task processing. If the MAN capacity is comfortable, distributing the requests between the edge servers absolutely enhances the performance of the system.
- Remote edge VM utilization: If neighboring edge VM utilization is available and the local edge server capacity is used up, the neighboring edge sever should be the target server for offloading the task if the MAN delay is low.
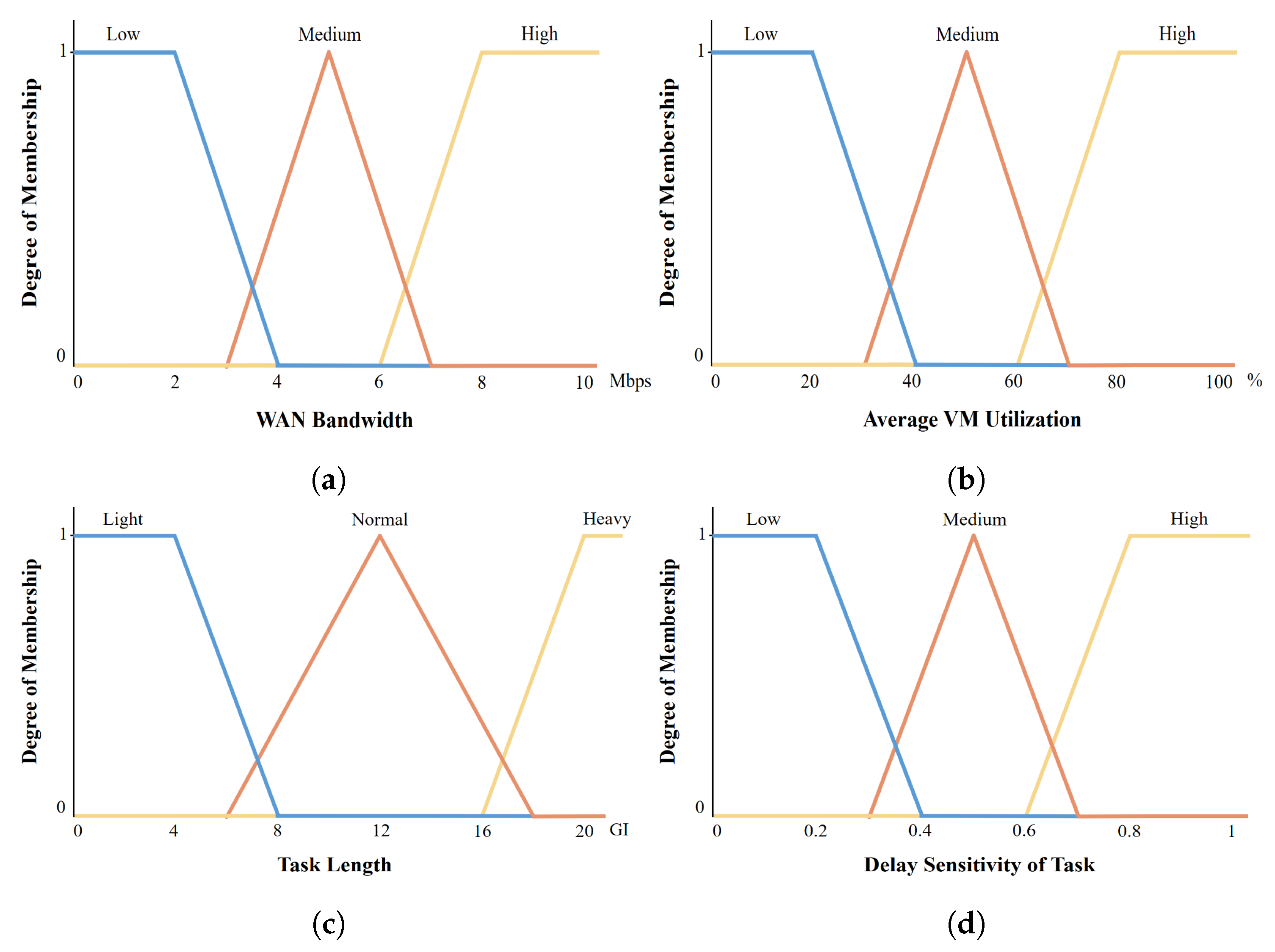
- WAN bandwidth: To decide whether the task should be offloaded to the cloud server or not, the WAN bandwidth is a key variable that has to be considered. If the WAN communication delay is higher than the QoS requirement of the task or the network is too overloaded to cause data losses, the offloading decision should send the task to an edge server, rather than to the cloud server.
- Average VM utilization: This variable represents the mean utilization of all VMs running on servers in the network. Therefore, the remaining computational resources among edge servers can be calculated. If the utilization is above a certain threshold, the edge servers are considered packed due to the high number of offloaded tasks. Consequently, there is no better server than the powerful cloud server for offloading the task.
- Size of the task: The service time is determined based on the length of the tasks. The task length needs to be analyzed as a metric for offloading decisions. A heavy task should be transferred to a powerful cloud server to mitigate the resource burden among edge servers. In our work, the task length depends on the type of application. In the majority of cases, a 30 giga instructions (GI) compute-intensive application should be processed in a cloud server, whereas a 6 GI healthcare application is likely to be executed in an edge server.
- Delay sensitivity of the task: This variable refers to the tolerance of the task as it may take a longer time to execute due to network congestion or server utilization levels. The delay sensitivity of the request is determined by the application parameters.
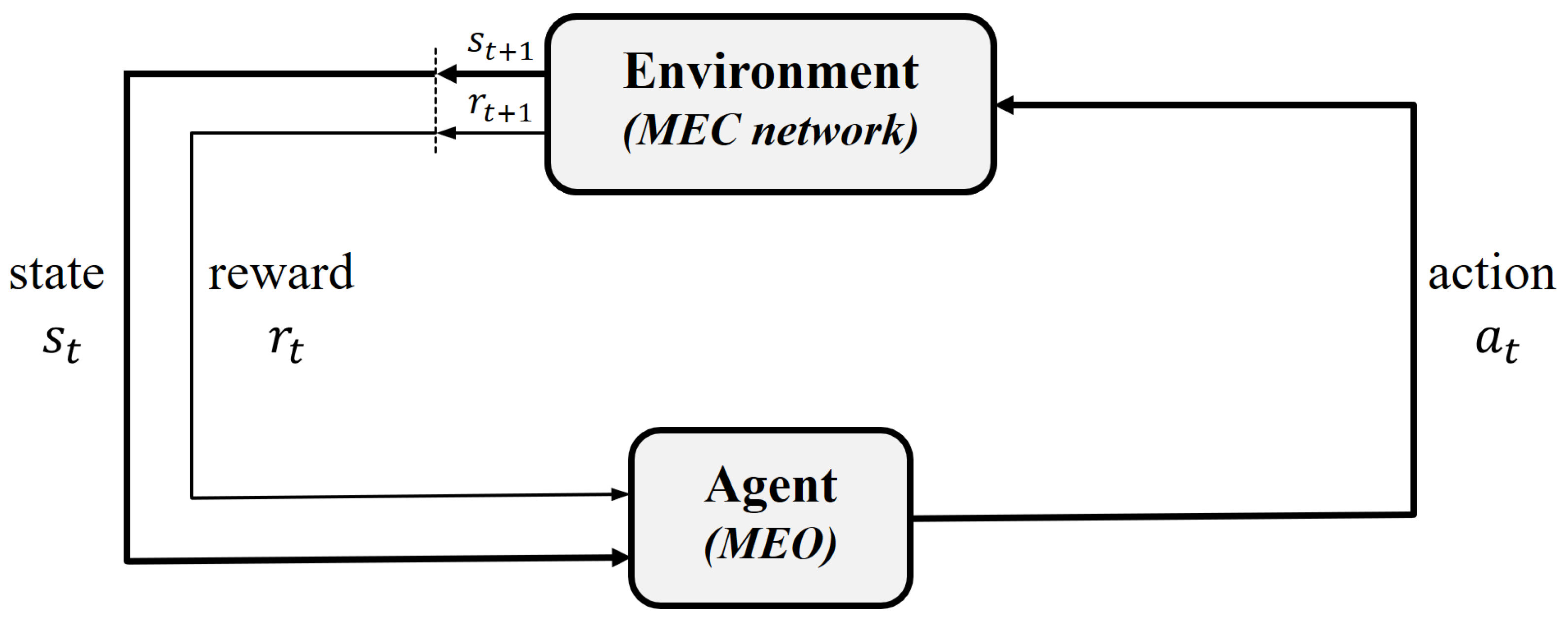
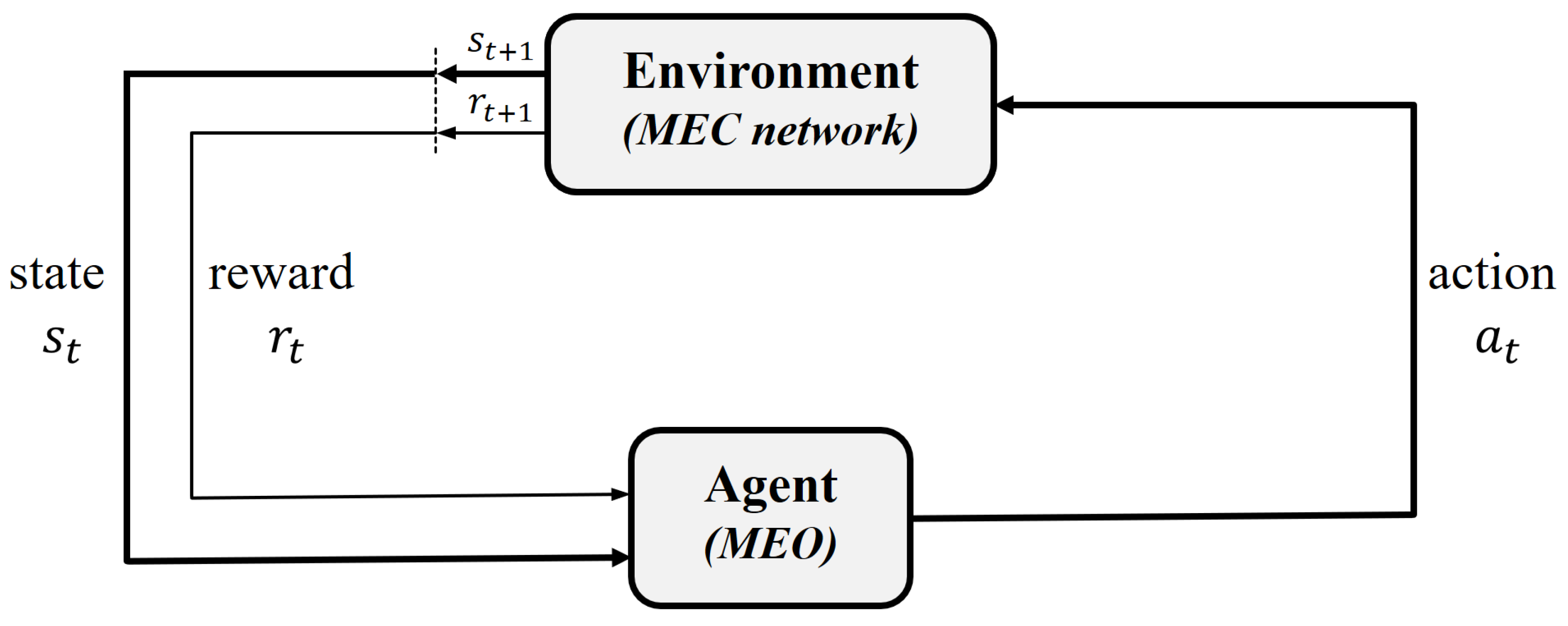
3.2.2. SARSA Phase
4. Two-Stage Fuzzy-Logic-Based Task Offloading Algorithm
4.1. Fuzzification
4.2. Fuzzy Inference
4.3. Defuzzification
| Algorithm 1 Two-Stage Fuzzy-Logic-Based Task Offloading Algorithm |
|
5. SARSA-Supported Task Offloading Algorithm
5.1. Communication Model and Computation Model
5.2. SARSA-Supported Offloading Decision
| Algorithm 2 SARSA-Supported Task Offloading Algorithm |
|
6. Performance Evaluation
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 5G | Fifth generation |
| AR | Augmented reality |
| BWM | Best-worst method |
| COG | Center of gravity |
| CPU | Central unit processing |
| DNN | Deep neural network |
| ETSI | European Telecommunications Standards Institute |
| FCD | Fuzzy clustering defuzzification |
| FLS | Fuzzy logic system |
| GWO | Grey wolf optimizer |
| IoT | Internet of Things |
| LAN | Local area network |
| LSTM | Long short-term memory |
| MAN | Metropolitan area network |
| MCC | Mobile cloud computing |
| MDP | Markov decision process |
| MEC | Multi-access edge computing |
| MEO | Mobile edge orchestrator |
| ML | Machine learning |
| MOM | Mean of maximum |
| PSO | Particle swarm optimization |
| QoE | Quality of experience |
| QoS | Quality of Services |
| SARSA | State-action-reward-state-action |
| TOPSIS | Technique for Order of Preference by Similarity to Ideal Solution |
| VEC | Vehicular edge computing |
| VM | Virtual machine |
| WAN | Wide area network |
| WFM | Weighted fuzzy mean |
| WLAN | Wireless local area network |
References
- Yu, W.; Liang, F.; He, X.; Hatcher, W.G.; Lu, C.; Lin, J.; Yang, X. A survey on the edge computing for the Internet of Things. IEEE Access 2017, 6, 6900–6919. [Google Scholar] [CrossRef]
- Khurpade, J.M.; Rao, D.; Sanghavi, P.D. A Survey on IOT and 5G Network. In Proceedings of the 2018 International Conference on Smart City and Emerging Technology (ICSCET), Mumbai, India, 5 January 2018; pp. 1–3. [Google Scholar]
- Sigwele, T.; Hu, Y.F.; Ali, M.; Hou, J.; Susanto, M.; Fitriawan, H. Intelligent and energy efficient mobile smartphone gateway for healthcare smart devices based on 5G. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–7. [Google Scholar]
- Sabella, D.; Vaillant, A.; Kuure, P.; Rauschenbach, U.; Giust, F. Mobile-edge computing architecture: The role of MEC in the Internet of Things. IEEE Consum. Electron. Mag. 2016, 5, 84–91. [Google Scholar] [CrossRef]
- Satyanarayanan, M. Mobile computing: The next decade. In Proceedings of the 1st ACM Workshop on Mobile Cloud Computing & Services: Social Networks and Beyond, San Francisco, CA, USA, 15–18 June 2010; pp. 1–6. [Google Scholar]
- Forman, G.H.; Zahorjan, J. The challenges of mobile computing. Computer 1994, 27, 38–47. [Google Scholar] [CrossRef] [Green Version]
- Etsi, M. Multi-access edge computing (mec) framework and reference architecture. ETSI GS MEC 2019, 3, V2. [Google Scholar]
- Ahmed, E.; Ahmed, A.; Yaqoob, I.; Shuja, J.; Gani, A.; Imran, M.; Shoaib, M. Bringing computation closer toward the user network: Is edge computing the solution? IEEE Commun. Mag. 2017, 55, 138–144. [Google Scholar] [CrossRef]
- Li, S.; Da Xu, L.; Zhao, S. 5G Internet of Things: A survey. J. Ind. Inf. Integr. 2018, 10, 1–9. [Google Scholar] [CrossRef]
- Taleb, T.; Samdanis, K.; Mada, B.; Flinck, H.; Dutta, S.; Sabella, D. On multi-access edge computing: A survey of the emerging 5G network edge cloud architecture and orchestration. IEEE Commun. Surv. Tutor. 2017, 19, 1657–1681. [Google Scholar] [CrossRef] [Green Version]
- Ranadheera, S.; Maghsudi, S.; Hossain, E. Computation offloading and activation of mobile edge computing servers: A minority game. IEEE Wirel. Commun. Lett. 2018, 7, 688–691. [Google Scholar] [CrossRef] [Green Version]
- Mazza, D.; Tarchi, D.; Corazza, G.E. A cluster based computation offloading technique for mobile cloud computing in smart cities. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 23–27 May 2016; pp. 1–6. [Google Scholar]
- ETSI. Mobile Edge Computing (MEC); Deployment of Mobile Edge Computing in an NFV Environment; ETSI ISG: Sophia Antipolis, France, 2018. [Google Scholar]
- Alli, A.A.; Alam, M.M. The fog cloud of things: A survey on concepts, architecture, standards, tools, and applications. Internet Things 2020, 9, 100177. [Google Scholar] [CrossRef]
- Mach, P.; Becvar, Z. Mobile edge computing: A survey on architecture and computation offloading. IEEE Commun. Surv. Tutor. 2017, 19, 1628–1656. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, V.; Khanh, T.T.; Oo, T.Z.; Tran, N.H.; Huh, E.N.; Hong, C.S. Latency minimization in a fuzzy-based mobile edge orchestrator for IoT applications. IEEE Commun. Lett. 2020, 25, 84–88. [Google Scholar] [CrossRef]
- Zhou, D.; Chao, F.; Lin, C.M.; Yang, L.; Shi, M.; Zhou, C. Integration of fuzzy CMAC and BELC networks for uncertain nonlinear system control. In Proceedings of the 2017 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Naples, Italy, 9–12 July 2017; pp. 1–6. [Google Scholar]
- Salmani, V.; Ensafi, R.; Khatib-Astaneh, N.; Naghibzadeh, M. A fuzzy-based multi-criteria scheduler for uniform multiprocessor real-time systems. In Proceedings of the 10th International Conference on Information Technology (ICIT 2007), Rourkela, India, 17–20 December 2007; pp. 179–184. [Google Scholar]
- Flores, H.; Su, X.; Kostakos, V.; Ding, A.Y.; Nurmi, P.; Tarkoma, S.; Hui, P.; Li, Y. Large-scale offloading in the Internet of Things. In Proceedings of the 2017 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kona, HI, USA, 13–17 March 2017; pp. 479–484. [Google Scholar]
- Sonmez, C.; Ozgovde, A.; Ersoy, C. Fuzzy workload orchestration for edge computing. IEEE Trans. Netw. Serv. Manag. 2019, 16, 769–782. [Google Scholar] [CrossRef]
- Nguyen, V.; Khanh, T.T.; Nguyen, T.D.; Hong, C.S.; Huh, E.N. Flexible computation offloading in a fuzzy-based mobile edge orchestrator for IoT applications. J. Cloud Comput. 2020, 9, 1–18. [Google Scholar] [CrossRef] [PubMed]
- Rathore, S.; Sharma, P.K.; Sangaiah, A.K.; Park, J.J. A hesitant fuzzy based security approach for fog and mobile-edge computing. IEEE Access 2017, 6, 688–701. [Google Scholar] [CrossRef]
- Hossain, M.D.; Sultana, T.; Nguyen, V.; Rahman, W.u.; Nguyen, T.D.; Huynh, L.N.; Huh, E.N. Fuzzy based collaborative task offloading scheme in the densely deployed small-cell networks with multi-access edge computing. Appl. Sci. 2020, 10, 3115. [Google Scholar] [CrossRef]
- Nakamura, T. 5G Evolution and 6G. In Proceedings of the 2020 IEEE Symposium on VLSI Technology, Honolulu, HI, USA, 16–19 June 2020; pp. 1–5. [Google Scholar]
- Jiang, F.; Ma, R.; Gao, Y.; Gu, Z. A reinforcement learning-based computing offloading and resource allocation scheme in F-RAN. EURASIP J. Adv. Signal Process. 2021, 2021, 1–25. [Google Scholar] [CrossRef]
- Eshratifar, A.E.; Pedram, M. Energy and performance efficient computation offloading for deep neural networks in a mobile cloud computing environment. In Proceedings of the 2018 on Great Lakes Symposium on VLSI, Chicago, IL, USA, 23–25 May 2018; pp. 111–116. [Google Scholar]
- Liu, C.F.; Bennis, M.; Debbah, M.; Poor, H.V. Dynamic task offloading and resource allocation for ultra-reliable low-latency edge computing. IEEE Trans. Commun. 2019, 67, 4132–4150. [Google Scholar] [CrossRef] [Green Version]
- An, V.T.; Hai, T.T.; Nguyen, B.M.; Le, N.P.; Binh, H.T.T. Fuzzy Deep Q-learning Task Offloading in Delay Constrained Vehicular Fog Computing. In Proceedings of the 2021 International Joint Conference on Neural Networks (IJCNN), Shenzhen, China, 18–22 July 2021; pp. 1–8. [Google Scholar]
- Alfakih, T.; Hassan, M.M.; Gumaei, A.; Savaglio, C.; Fortino, G. Task offloading and resource allocation for mobile edge computing by deep reinforcement learning based on SARSA. IEEE Access 2020, 8, 54074–54084. [Google Scholar] [CrossRef]
- Defazio, A.; Graepel, T. A comparison of learning algorithms on the arcade learning environment. arXiv 2014, arXiv:1410.8620. [Google Scholar]
- Gao, Z.; Hao, W.; Han, Z.; Yang, S. Q-learning-based task offloading and resources optimization for a collaborative computing system. IEEE Access 2020, 8, 149011–149024. [Google Scholar] [CrossRef]
- Hossain, M.S.; Nwakanma, C.I.; Lee, J.M.; Kim, D.S. Edge computational task offloading scheme using reinforcement learning for IIoT scenario. ICT Express 2020, 6, 291–299. [Google Scholar] [CrossRef]
- Zhang, W.; Yin, S.; Zhang, Z.; Yang, C.; Luo, Z.; Huang, S. SARSA-Based Computation Offloading between Cloudlets with EON. In Asia Communications and Photonics Conference; Optical Society of America: Washington, DC, USA, 2019; p. S4C-5. [Google Scholar]
- Dab, B.; Aitsaadi, N.; Langar, R. Q-learning algorithm for joint computation offloading and resource allocation in edge cloud. In Proceedings of the 2019 IFIP/IEEE Symposium on Integrated Network and Service Management (IM), Washington, DC, USA, 8–12 April 2019; pp. 45–52. [Google Scholar]
- Mahenge, M.P.J.; Li, C.; Sanga, C.A. Energy-efficient task offloading strategy in mobile edge computing for resource-intensive mobile applications. Digit. Commun. Netw. 2022, in press. [Google Scholar] [CrossRef]
- Shu, C.; Zhao, Z.; Han, Y.; Min, G.; Duan, H. Multi-user offloading for edge computing networks: A dependency-aware and latency-optimal approach. IEEE Internet Things J. 2019, 7, 1678–1689. [Google Scholar] [CrossRef]
- Kuang, Z.; Li, L.; Gao, J.; Zhao, L.; Liu, A. Partial offloading scheduling and power allocation for mobile edge computing systems. IEEE Internet Things J. 2019, 6, 6774–6785. [Google Scholar] [CrossRef]
- Huynh, L.N.; Pham, Q.V.; Pham, X.Q.; Nguyen, T.D.; Hossain, M.D.; Huh, E.N. Efficient computation offloading in multi-tier multi-access edge computing systems: A particle swarm optimization approach. Appl. Sci. 2019, 10, 203. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Mao, Y.; Leng, S.; Zhao, Q.; Li, L.; Peng, X.; Pan, L.; Maharjan, S.; Zhang, Y. Energy-efficient offloading for mobile edge computing in 5G heterogeneous networks. IEEE Access 2016, 4, 5896–5907. [Google Scholar] [CrossRef]
- Khorsand, R.; Ramezanpour, M. An energy-efficient task-scheduling algorithm based on a multi-criteria decision-making method in cloud computing. Int. J. Commun. Syst. 2020, 33, e4379. [Google Scholar] [CrossRef]
- Dai, Y.; Xu, D.; Maharjan, S.; Zhang, Y. Joint load balancing and offloading in vehicular edge computing and networks. IEEE Internet Things J. 2018, 6, 4377–4387. [Google Scholar] [CrossRef]
- Lyu, X.; Tian, H.; Sengul, C.; Zhang, P. Multiuser joint task offloading and resource optimization in proximate clouds. IEEE Trans. Veh. Technol. 2016, 66, 3435–3447. [Google Scholar] [CrossRef]
- Tran, T.X.; Pompili, D. Joint task offloading and resource allocation for multi-server mobile-edge computing networks. IEEE Trans. Veh. Technol. 2018, 68, 856–868. [Google Scholar] [CrossRef] [Green Version]
- Basic, F.; Aral, A.; Brandic, I. Fuzzy handoff control in edge offloading. In Proceedings of the 2019 IEEE International Conference on Fog Computing (ICFC), Prague, Czech Republic, 24–26 June 2019; pp. 87–96. [Google Scholar]
- Wei, Y.; Wang, Z.; Guo, D.; Yu, F.R. Deep q-learning based computation offloading strategy for mobile edge computing. Comput. Mater. Contin. 2019, 59, 89–104. [Google Scholar] [CrossRef] [Green Version]
- Tang, M.; Wong, V.W. Deep reinforcement learning for task offloading in mobile edge computing systems. IEEE Trans. Mob. Comput. 2020, 21, 1985–1997. [Google Scholar] [CrossRef]
- Pan, C.; Wang, Z.; Zhou, Z.; Ren, X. Deep reinforcement learning-based URLLC-aware task offloading in collaborative vehicular networks. China Commun. 2021, 18, 134–146. [Google Scholar] [CrossRef]
- Jeong, J.; Kim, I.M.; Hong, D. Deep Reinforcement Learning-based Task Offloading Decision in the Time Varying Channel. In Proceedings of the 2021 International Conference on Electronics, Information, and Communication (ICEIC), Jeju, Korea, 31 January–3 February 2021; pp. 1–4. [Google Scholar]
- Gao, H.; Huang, W.; Liu, T.; Yin, Y.; Li, Y. PPO2: Location Privacy-Oriented Task Offloading to Edge Computing Using Reinforcement Learning for Intelligent Autonomous Transport Systems. IEEE Trans. Intell. Transp. Syst. 2022. [Google Scholar] [CrossRef]
- Kouatli, I. The Use of Fuzzy Logic as Augmentation to Quantitative Analysis to Unleash Knowledge of Partici-pants’ Uncertainty when Filling a Survey: Case of cloud computing. IEEE Trans. Knowl. Data Eng. 2020, 34, 1489–1500. [Google Scholar] [CrossRef]
- Abdullah, L. Fuzzy multi criteria decision making and its applications: A brief review of category. Procedia Soc. Behav. Sci. 2013, 97, 131–136. [Google Scholar] [CrossRef] [Green Version]
- Khanh, T.T.; Nguyen, V.; Huh, E.N. Fuzzy-Based Mobile Edge Orchestrators in Heterogeneous IoT Environments: An Online Workload Balancing Approach. Wirel. Commun. Mob. Comput. 2021, 2021, 5539186. [Google Scholar] [CrossRef]
- Mendel, J.M. Fuzzy logic systems for engineering: A tutorial. Proc. IEEE 1995, 83, 345–377. [Google Scholar] [CrossRef] [Green Version]
- Flores, H.; Srirama, S. Adaptive code offloading for mobile cloud applications: Exploiting fuzzy sets and evidence-based learning. Proceeding of the Fourth ACM Workshop on Mobile Cloud Computing and Services, Taipei, Taiwan, 25 June 2013; pp. 9–16. [Google Scholar]
- Hosseini, S.; Kazeminia, M.; Mehrjoo, M.; Barakati, S. Fuzzy logic based mobile data offloading. In Proceedings of the 2015 23rd Iranian Conference on Electrical Engineering, Tehran, Iran, 10–14 May 2015; pp. 397–401. [Google Scholar]
- Ghosh, S.; Razouqi, Q.; Schumacher, H.J.; Celmins, A. A survey of recent advances in fuzzy logic in telecommunications networks and new challenges. IEEE Trans. Fuzzy Syst. 1998, 6, 443–447. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, N.; Amin, R.; Aldabbas, H.; Koundal, D.; Alouffi, B.; Shah, T. Machine learning techniques for spam detection in email and IoT platforms: Analysis and research challenges. Secur. Commun. Netw. 2022, 2022, 1862888. [Google Scholar] [CrossRef]
- Guo, Z.; Wong, W.K. Fundamentals of artificial intelligence techniques for apparel management applications. In Optimizing Decision Making in the Apparel Supply Chain Using Artificial Intelligence (AI): From Production to Retail; Elsevier Inc.: Amsterdam, The Netherlands, 2013; pp. 13–40. [Google Scholar]
- Hossain, M.D.; Sultana, T.; Hossain, M.A.; Hossain, M.I.; Huynh, L.N.; Park, J.; Huh, E.N. Fuzzy decision-based efficient task offloading management scheme in multi-tier MEC-enabled networks. Sensors 2021, 21, 1484. [Google Scholar] [CrossRef] [PubMed]
- Cingolani, P.; Alcala-Fdez, J. jFuzzyLogic: A robust and flexible Fuzzy-Logic inference system language implementation. In Proceedings of the 2012 IEEE International Conference on Fuzzy Systems, Brisbane, Australia, 10–15 June 2012; pp. 1–8. [Google Scholar]
- Abuowada, K.; Dyke, D.; Noroozi, S.; Okhotnikov, I. Dynamic Performance Analysis of PID and Fuzzy Logic Controllers Applicable in Electrohydraulic Servo Actuator. In Proceedings of the 13th APCA International Conference on Automatic Control and Soft Computing, Ponta Delgada, Azores, Portugal, 4–6 June 2018. [Google Scholar]
- Dernoncourt, F. Introduction to fuzzy logic. Mass. Inst. Technol. 2013, 21, 50–56. [Google Scholar]
- Liu, Q.; Li, Q. A Joint Allocation Algorithm of Computing and Communication Resources Based on Reinforcement Learning in MEC System. J. Inf. Process. Syst. 2021, 17, 721–736. [Google Scholar]
- Jin, C.; Allen-Zhu, Z.; Bubeck, S.; Jordan, M.I. Is Q-learning provably efficient? Adv. Neural Inf. Process. Syst. 2018, 31. [Google Scholar]
- Sonmez, C.; Ozgovde, A.; Ersoy, C. Edgecloudsim: An environment for performance evaluation of edge computing systems. Trans. Emerg. Telecommun. Technol. 2018, 29, e3493. [Google Scholar] [CrossRef]
- Tunca, C.; Pehlivan, N.; Ak, N.; Arnrich, B.; Salur, G.; Ersoy, C. Inertial sensor-based robust gait analysis in non-hospital settings for neurological disorders. Sensors 2017, 17, 825. [Google Scholar] [CrossRef] [Green Version]
- Silva, M.; Freitas, D.; Neto, E.; Lins, C.; Teichrieb, V.; Teixeira, J.M. Glassist: Using augmented reality on Google Glass as an aid to classroom management. In Proceedings of the 2014 XVI Symposium on Virtual and Augmented Reality, Salvador, Brazil, 12–15 May 2014; pp. 37–44. [Google Scholar]
- Guo, J.; Song, B.; He, Y.; Yu, F.R.; Sookhak, M. A survey on compressed sensing in vehicular infotainment systems. IEEE Commun. Surv. Tutor. 2017, 19, 2662–2680. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, X. A compute-intensive service migration strategy based on deep reinforcement learning algorithm. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 July 2020; Volume 1, pp. 1385–1388. [Google Scholar]
- Almutairi, J.; Aldossary, M. A novel approach for IoT tasks offloading in edge-cloud environments. J. Cloud Comput. 2021, 10, 1–19. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Q-Learning | SARSA | |
|---|---|---|
| Learning type | Off-Policy | On-Policy |
| Next action decision | Next action is determined based on the best action in a set of actions a | Next action is determined based on policy (e.g., -greedy policy) |
| Q-table update rule | Updated based on the greedy policy from the Q-table | Updated based on the current state, current action, obtained reward, next state, and next action |
| Convergent | Converged to an optimal solution under the assumption that, after generating experience and training, the system switches over to the greedy policy | Converged to an optimal solution under the assumption that the system keeps following the same policy that is used to achieve the experience |
| Application cases | Preferable in situations where the agent’s performance is not considered during the training process, but switches to learn an optimal greedy policy eventually | Preferable in situations where an agent’s performance is taken into consideration during the process of learning and generating the experience |
| Popularity | More popular | Less popular |
| Input Variable | Notation | Linguistic Value | Membership Function Type | Range |
|---|---|---|---|---|
| WLAN Delay (ms) | low | left-shoulder | 0, 1, 4 | |
| medium | triangular | 2, 7, 12 | ||
| high | right-shoulder | 10, 13, >13 | ||
| MAN Delay (ms) | low | left-shoulder | 0, 1, 4 | |
| medium | triangular | 2, 7, 12 | ||
| high | right-shoulder | 10, 13, >13 | ||
| Local edge VM utilization (%) | low | left-shoulder | 0, 20, 40 | |
| medium | triangular | 30, 50, 70 | ||
| high | right-shoulder | 60, 80, >80 | ||
| Remote edge VM utilization (%) | low | left-shoulder | 0, 20, 40 | |
| medium | triangular | 30, 50, 70 | ||
| high | right-shoulder | 60, 80, >80 |
| Input Variable | Notation | Linguistic Value | Membership Function Type | Range |
|---|---|---|---|---|
| WAN bandwidth (Mbps) | low | left-shoulder | 0, 2, 4 | |
| medium | triangular | 3, 5, 7 | ||
| high | right-shoulder | 6, 8, >8 | ||
| Average VM utilization (%) | low | left-shoulder | 0, 20, 40 | |
| medium | triangular | 30, 50, 70 | ||
| high | right-shoulder | 60, 80, >80 | ||
| Task Length (GI) | light | left-shoulder | 0, 4, 8 | |
| normal | triangular | 6, 12, 18 | ||
| heavy | right-shoulder | 16, 20, >20 | ||
| Delay sensitivity of the task | low | left-shoulder | 0, 0.2, 0.4 | |
| medium | triangular | 0.3, 0.5, 0.7 | ||
| high | right-shoulder | 0.6, 0.8, 1 |
| Rule Index | Decision | ||||
|---|---|---|---|---|---|
| R1 | medium | high | normal | high | cloud |
| R2 | high | medium | heavy | low | cloud |
| R3 | high | high | heavy | high | cloud |
| R4 | low | low | light | high | remote edge |
| R5 | low | medium | light | high | remote edge |
| Parameter | Value |
|---|---|
| Simulation time/warm-up period | 33/3 min |
| Minimum/maximum number of IoT devices | 250/2500 |
| Step size of IoT device count | 250 |
| Number of edge/cloud servers | 14/1 |
| Number of VMs per edge/cloud server | 8/4 |
| Number of cores per edge/cloud VM CPU | 2/4 |
| VM CPU speed per edge/cloud | 10/100 GIPS |
| Mobility model | Random way point |
| MAN bandwidth | MMPP/M/1 model |
| WAN/WLAN bandwidth | Empirical |
| LAN propagation delay | 5 ms |
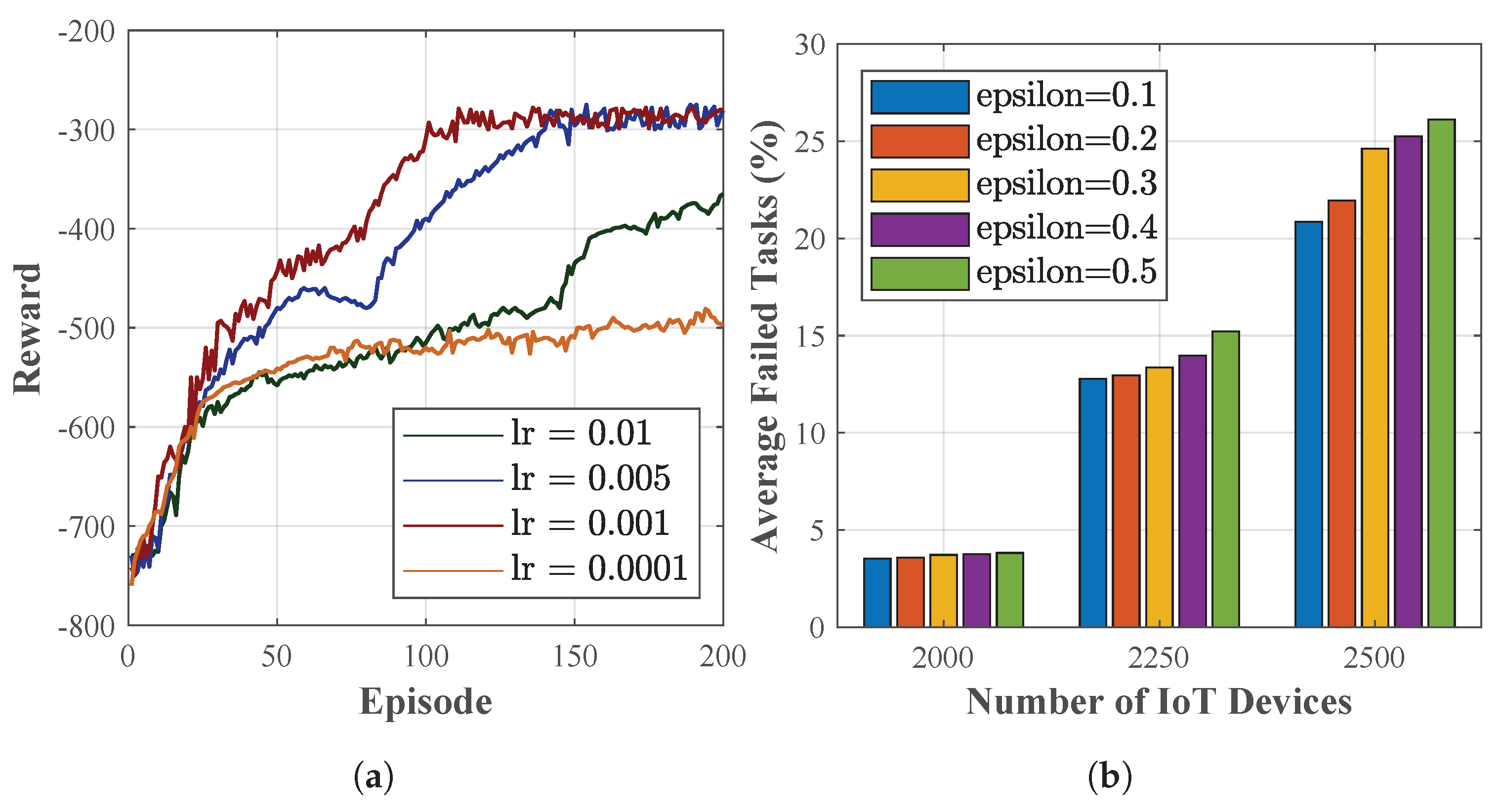
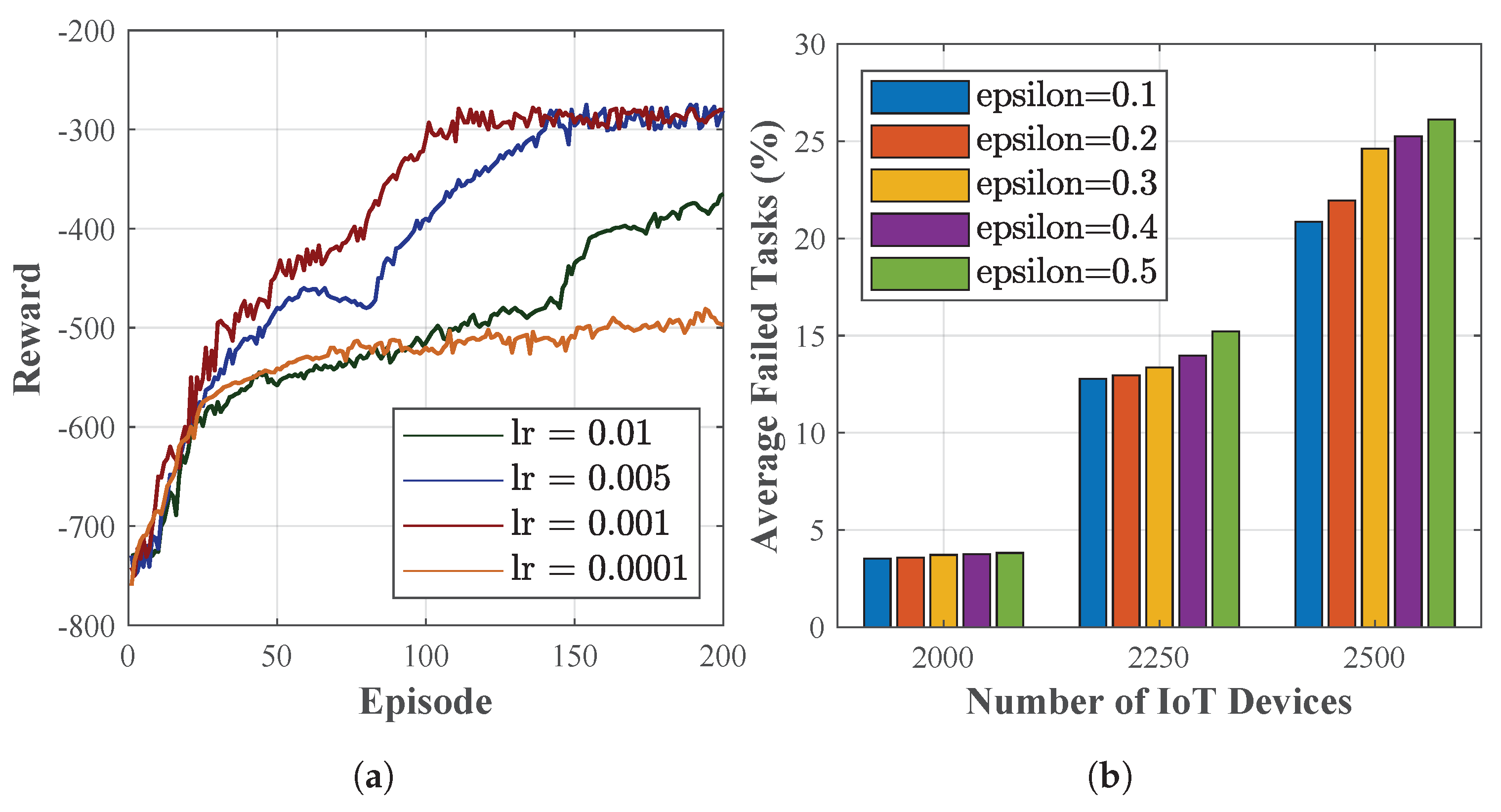
| Learning rate | 0.001 |
| Epsilon | 0.1 |
| Discount factor | 0.5 |
| Healthcare | AR | Infotainment | Compute-Intensive | |
|---|---|---|---|---|
| Usage percentage (%) | 20 | 30 | 30 | 20 |
| Task interval (sec) | 3 | 2 | 7 | 4 |
| Delay sensitivity | 0.6 | 0.9 | 0.4 | 0.15 |
| Active/Idle period (sec) | 45/90 | 40/20 | 30/45 | 60/120 |
| Upload/Download data (KB) | 20/1250 | 1500/25 | 25/1000 | 2500/200 |
| Task length (GI) | 6 | 9 | 15 | 30 |
| VM utilization on edge (%) | 4 | 6 | 10 | 20 |
| VM utilization on cloud (%) | 0.4 | 0.6 | 1 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khanh, T.T.; Hai, T.H.; Hossain, M.D.; Huh, E.-N. Fuzzy-Assisted Mobile Edge Orchestrator and SARSA Learning for Flexible Offloading in Heterogeneous IoT Environment. Sensors 2022, 22, 4727. https://doi.org/10.3390/s22134727
Khanh TT, Hai TH, Hossain MD, Huh E-N. Fuzzy-Assisted Mobile Edge Orchestrator and SARSA Learning for Flexible Offloading in Heterogeneous IoT Environment. Sensors. 2022; 22(13):4727. https://doi.org/10.3390/s22134727
Chicago/Turabian StyleKhanh, Tran Trong, Tran Hoang Hai, Md. Delowar Hossain, and Eui-Nam Huh. 2022. "Fuzzy-Assisted Mobile Edge Orchestrator and SARSA Learning for Flexible Offloading in Heterogeneous IoT Environment" Sensors 22, no. 13: 4727. https://doi.org/10.3390/s22134727
APA StyleKhanh, T. T., Hai, T. H., Hossain, M. D., & Huh, E.-N. (2022). Fuzzy-Assisted Mobile Edge Orchestrator and SARSA Learning for Flexible Offloading in Heterogeneous IoT Environment. Sensors, 22(13), 4727. https://doi.org/10.3390/s22134727