
Scan Time Reduction of PLCs by Dedicated Parallel-Execution Multiple PID Controllers Using an FPGA


Abstract
:1. Introduction
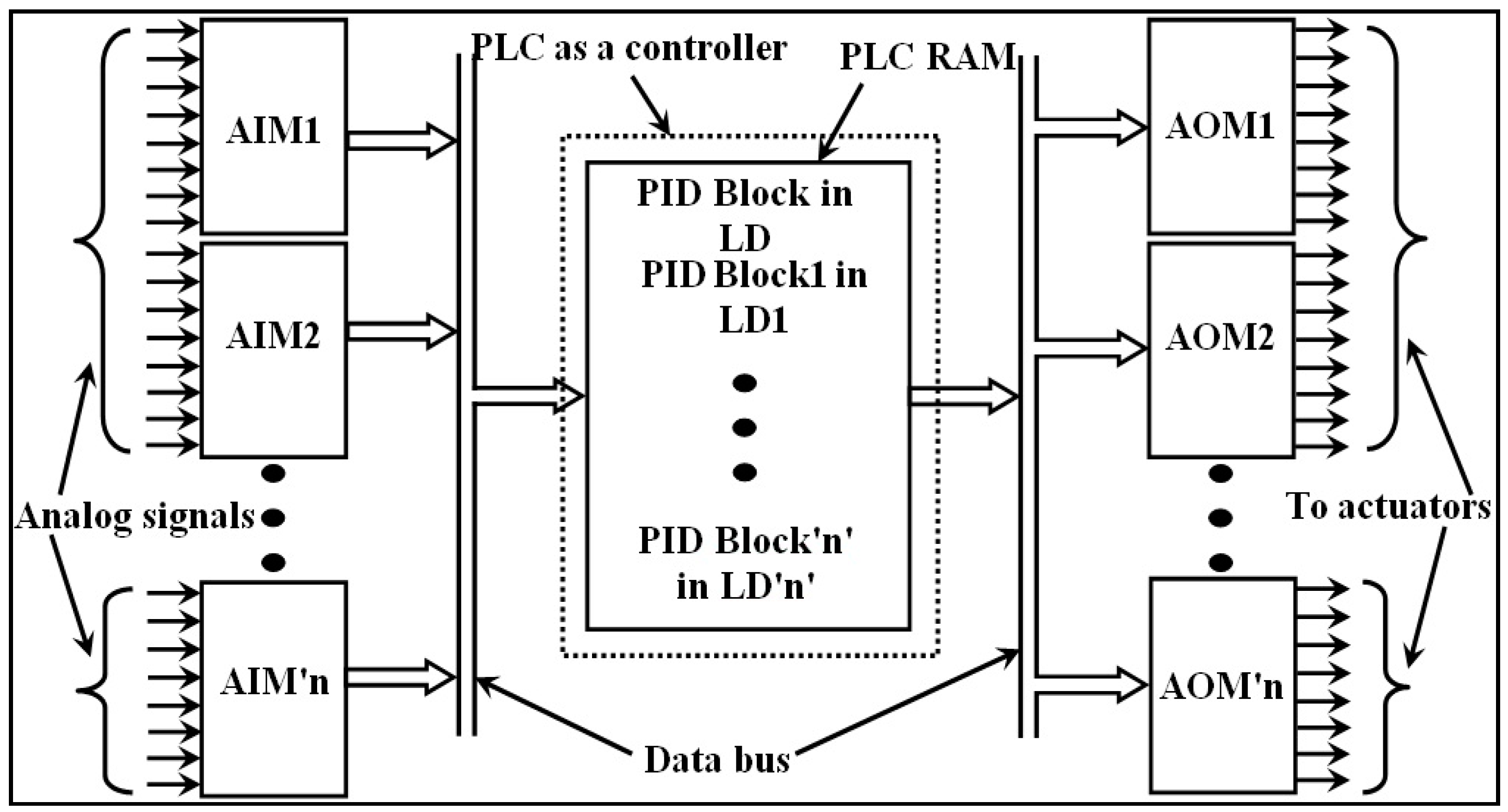
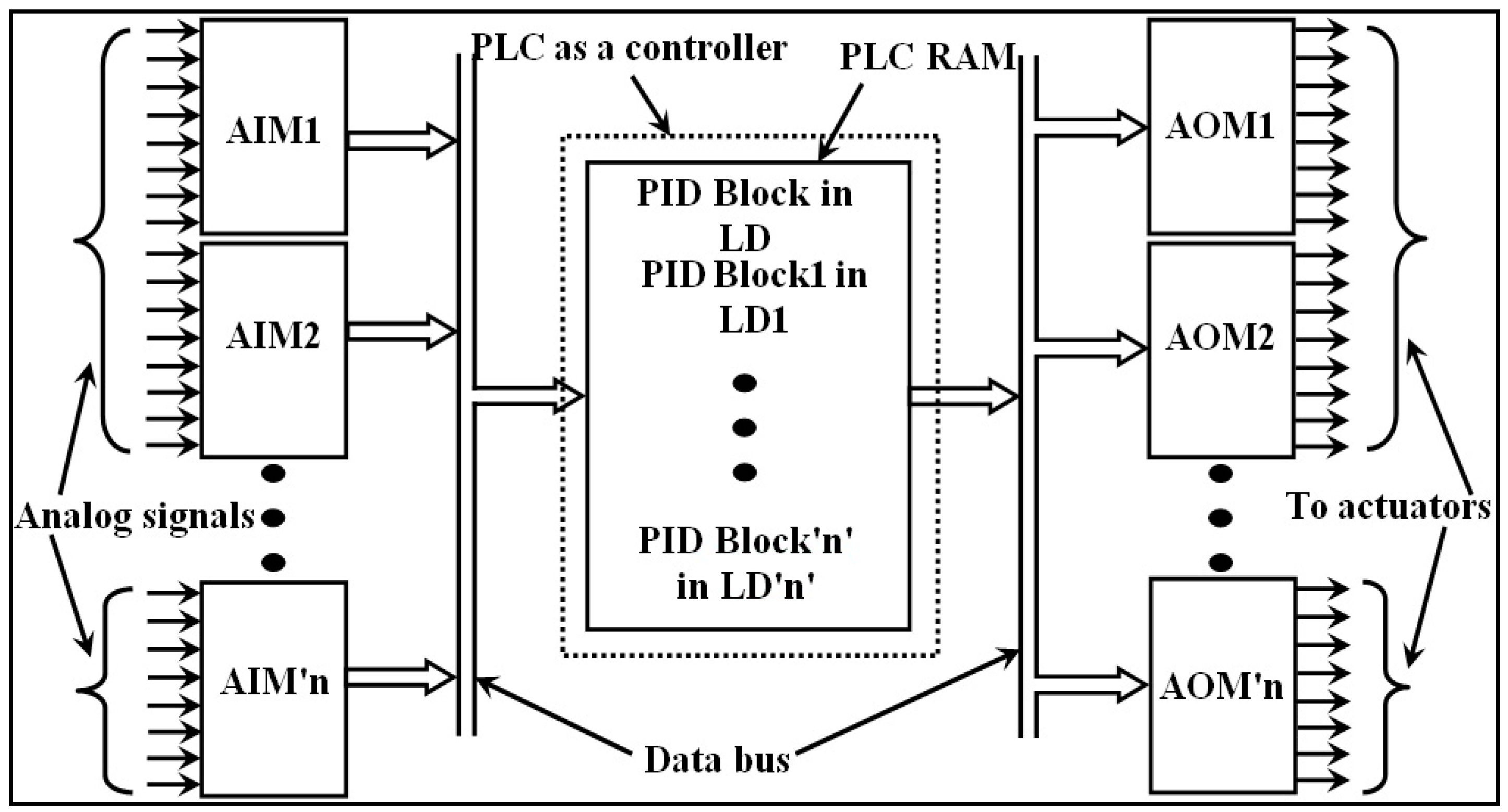
2. Overview of Closed-Loop Control System with PLC
3. Design of Single and Multiple PID Controllers
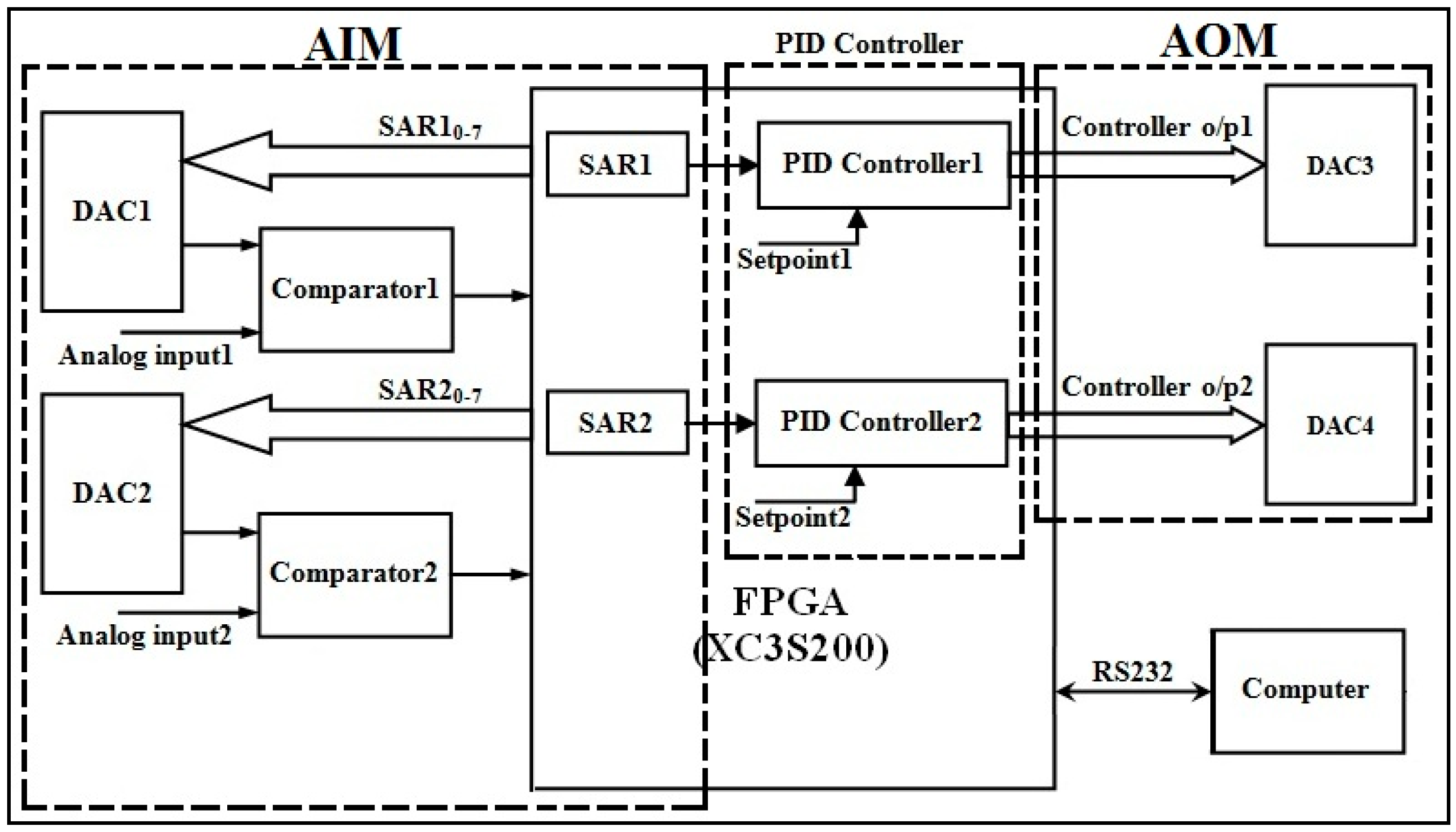
3.1. FPGA Design of PID Controller
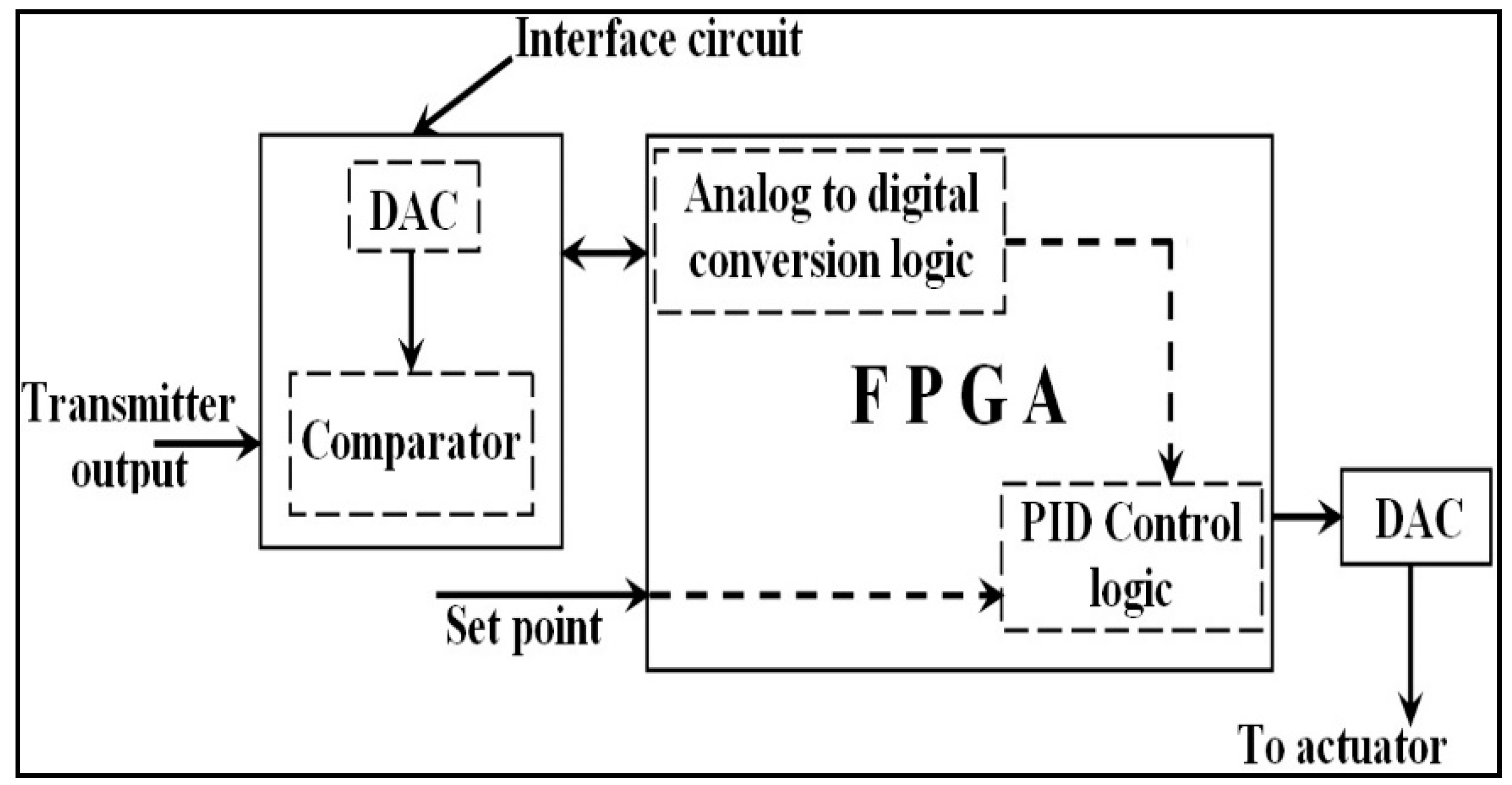
3.1.1. Single Closed-Loop Control System—Proposed
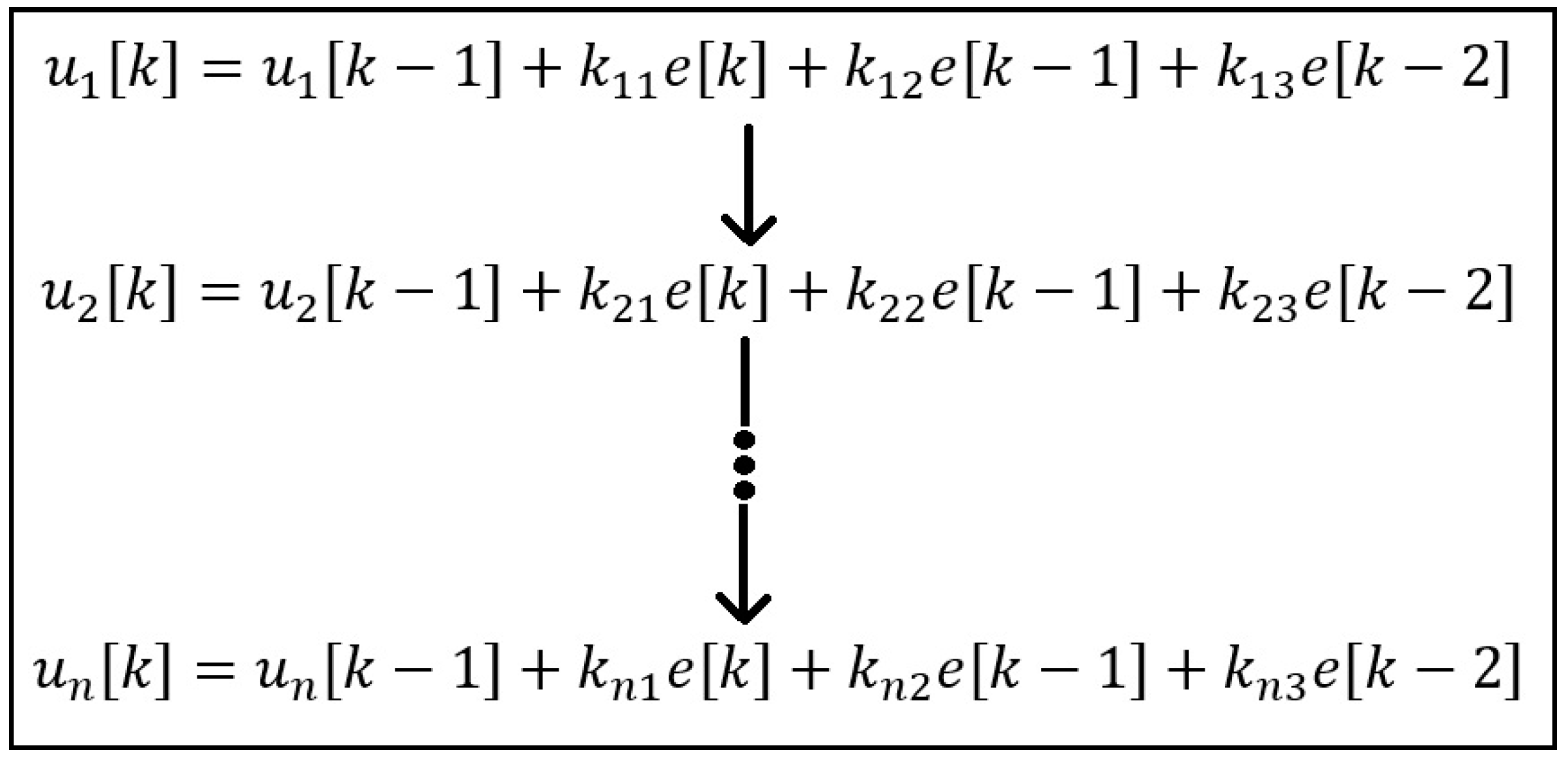
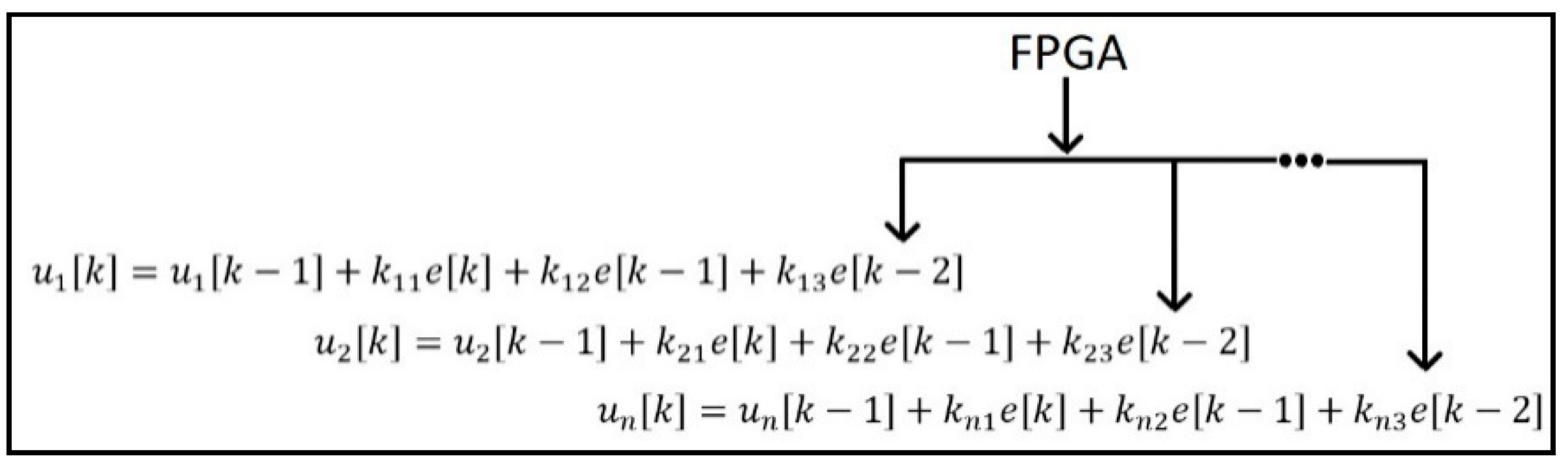
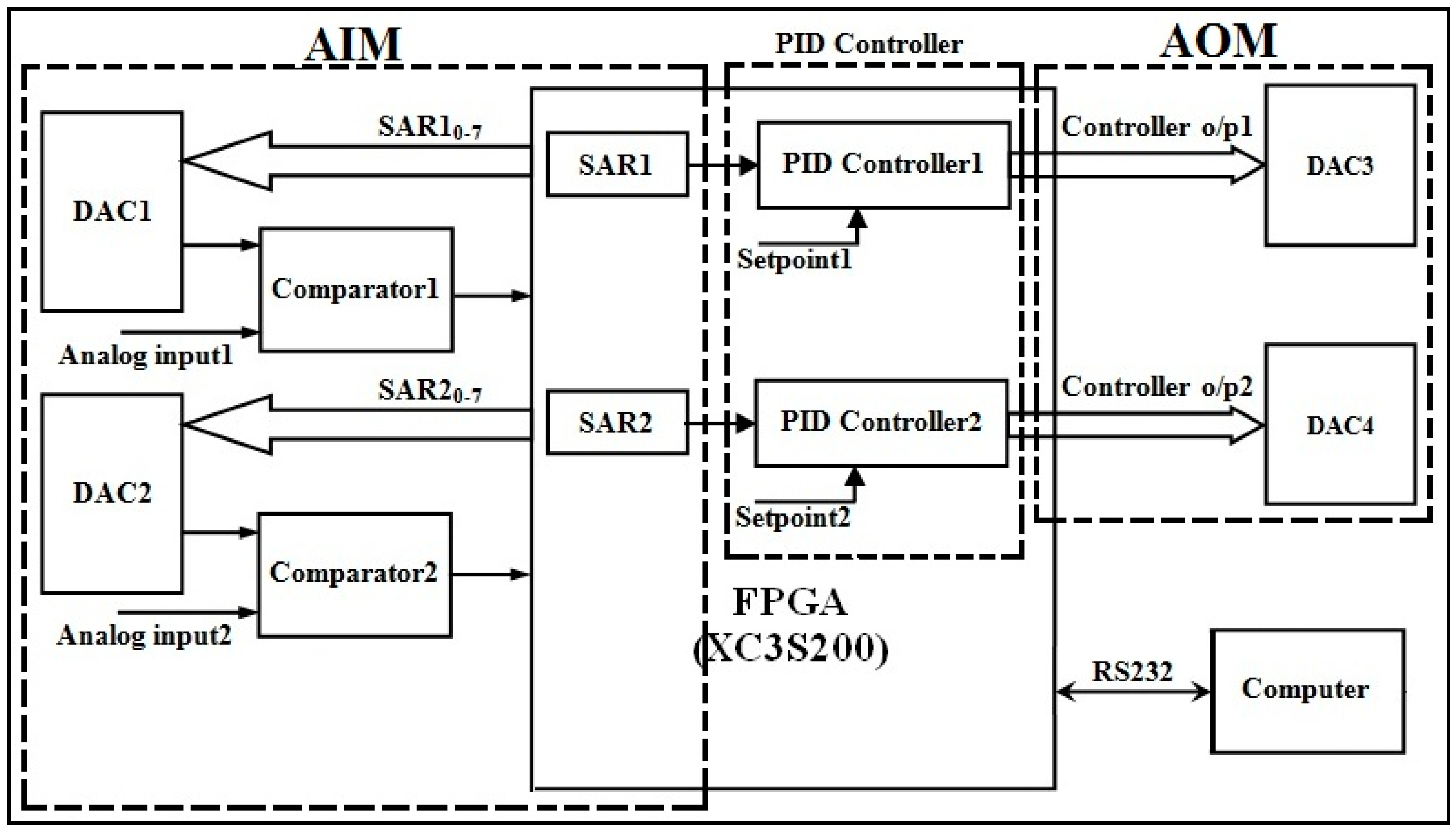
3.1.2. Multiple Closed-Loop Control System—Proposed
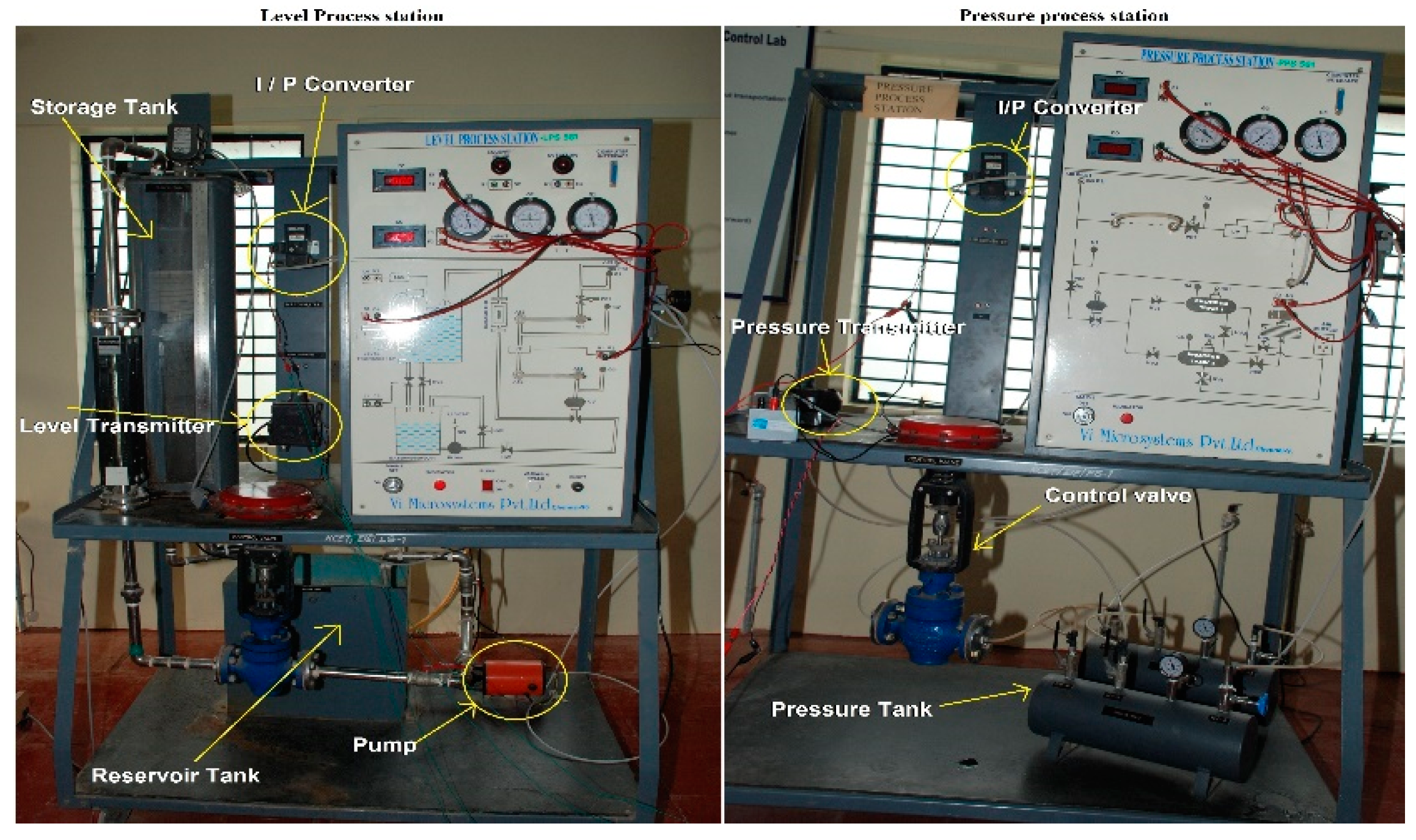
3.2. Case Study of Multiple PID Controller—Level and Pressure Process Station
3.2.1. Level Process Station
3.2.2. Pressure Process Station
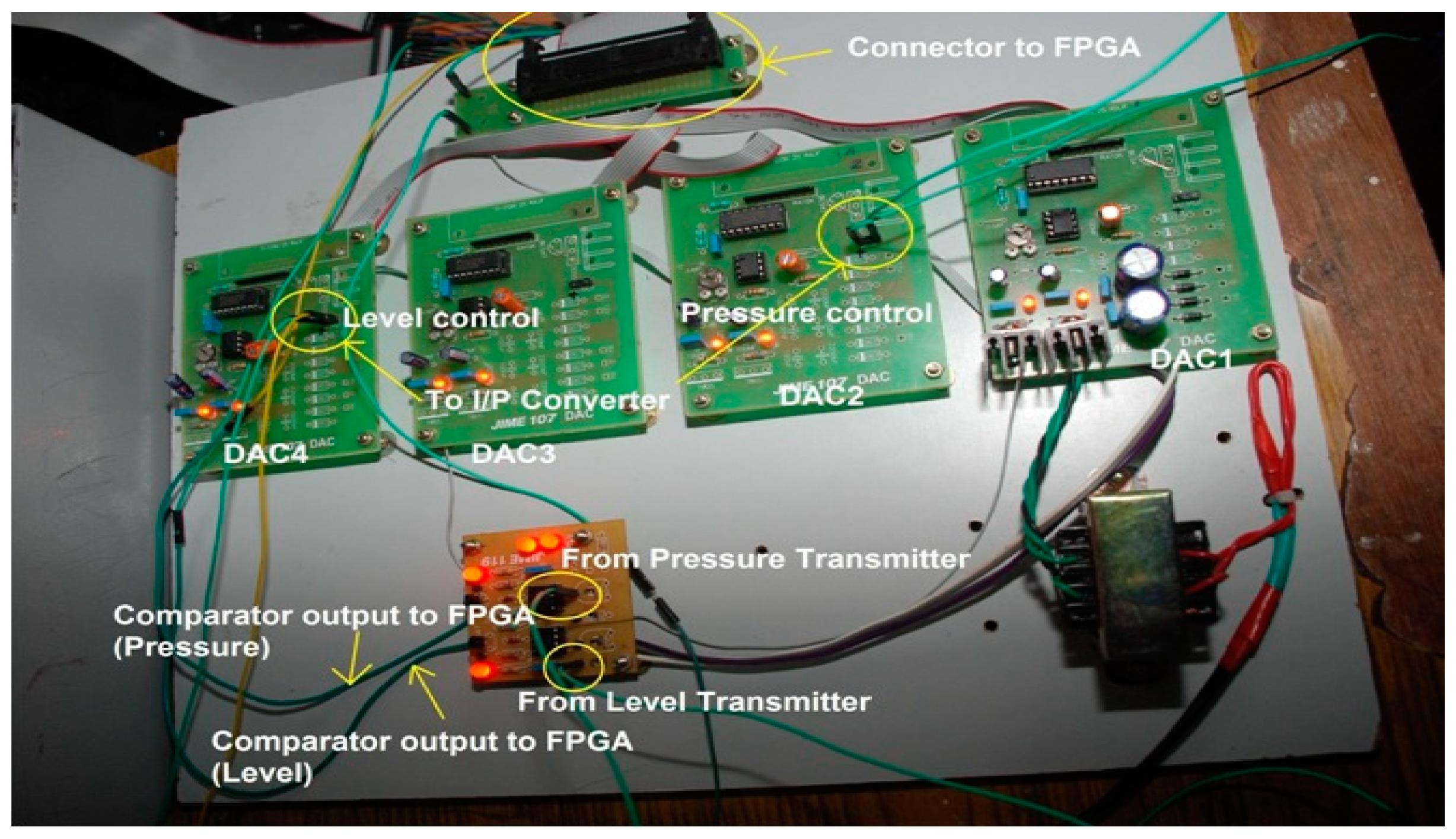
3.2.3. FPGA Interfacing Board
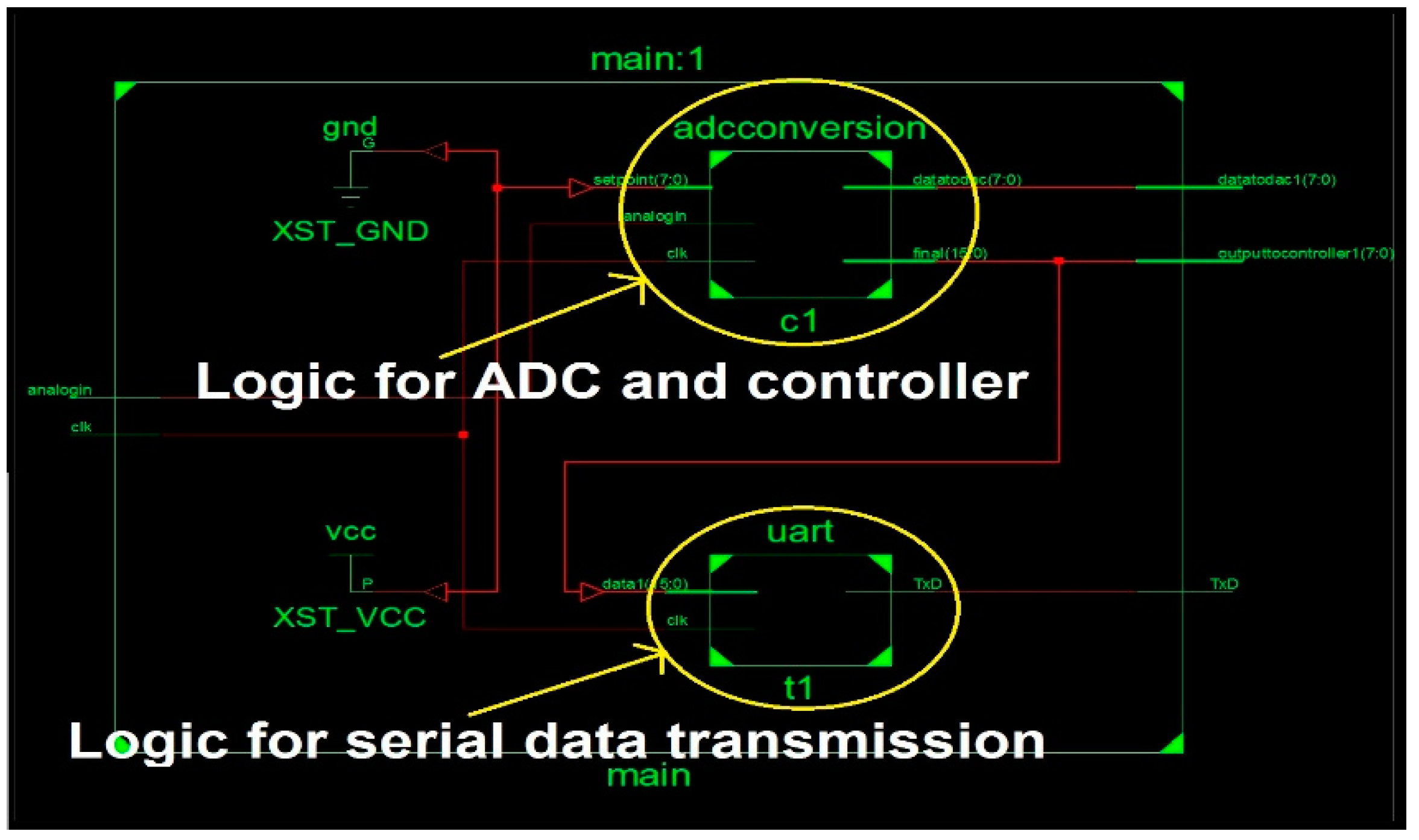
3.3. VerilogHDL Code—Acquisition, Control, UART
3.3.1. VerilogHDL Code—Single PID Controller, UART
3.3.2. VerilogHDL Code—Multiple PID Controller
4. Results and Discussion
4.1. Performance Analysis of Closed-Loop Control System
4.1.1. Hardware Resources of FPGA
4.1.2. Delay Analysis of FPGA
4.1.3. Delay Analysis of DAC and the Comparator
4.1.4. Delay Analysis of Single and Multiple Closed-Loop Control System
4.2. Performance Comparison of the Proposed Design with PLC
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- De Canete, J.F.; del Saz-Orozco, P.; Gonzalez, S.; Garcia-Moral, I. Dual composition control and soft estimation for a pilot distillation column using a neurogenetic design. Comput. Chem. Eng. 2012, 40, 157–170. [Google Scholar] [CrossRef]
- Salem, A.; Abu-Siada, A.; Islam, S. Improved condition monitoring technique for wind turbine gearbox and shaft stress detection. IET Sci. Meas. Technol. 2017, 11, 431–437. [Google Scholar] [CrossRef]
- Carlos, G.G.; Juvenal, R.R.; Georgina, M.V.; Edgar, R.A.; Jorge, M.S.; Ricardo, L.R. A PC-based architecture for parameter analysis of vector-controlled induction motor drive. Comput. Electr. Eng. 2011, 37, 858–868. [Google Scholar]
- Bayindir, R.; Cetinceviz, Y. A water pumping control system with a programmable logic controller (PLC) and industrial wireless modules for industrial plants—An experimental setup. ISA Trans. 2011, 50, 321–328. [Google Scholar] [CrossRef] [PubMed]
- Jaiswal, S.; Ballal, M.S. FDST-based PQ event detection and energy metering implementation on FPGA-in-the-loop and NI-LabVIEW. IET Sci. Meas. Technol. 2017, 11, 453–463. [Google Scholar] [CrossRef]
- Chakraborty, K.; Choudhury, M.; Das, S.; Paul, S. Development of PLC-SCADA based control strategy for water storage in a tank for a semi-automated plant. J. Instrum. 2020, 15, T04007. [Google Scholar] [CrossRef]
- Ioannides, M. Design and Implementation of PLC-Based Monitoring Control System for Induction Motor. IEEE Trans. Energy Convers. 2004, 19, 469–476. [Google Scholar] [CrossRef]
- Lizarraga-Morales, R.A.; Rodriguez-Donate, C.; Cabal-Yepez, E.; Lopez-Ramirez, M.; Ledesma-Carrillo, L.M.; Ferrucho-Alvarez, E.R. Novel FPGA-based Methodology for Early Broken Rotor Bar Detection and Classification Through Homogeneity Estimation. IEEE Trans. Instrum. Meas. 2017, 66, 1760–1769. [Google Scholar] [CrossRef]
- Youness, H.; Moness, M.; Khaled, M. MPSoCs and Multicore Microcontrollers for Embedded PID Control: A Detailed Study. IEEE Trans. Ind. Inform. 2014, 10, 2122–2134. [Google Scholar] [CrossRef]
- Saponara, S.; Neri, B. Radar Sensor Signal Acquisition and Multidimensional FFT Processing for Surveillance Applications in Transport Systems. IEEE Trans. Instrum. Meas. 2017, 66, 604–615. [Google Scholar] [CrossRef]
- Dong, J.; Wang, T.; Li, B.; Liu, Z.; Yu, Z. An FPGA-based low-cost VLIW floating-point processor for CNC applications. Microprocess. Microsyst. 2017, 50, 14–25. [Google Scholar] [CrossRef]
- Senthilnathan, A.; Palanivel, P. A new approach for commutation torque ripple reduction of FPGA based brushless DC motor with outgoing phase current control. Microprocess. Microsyst. 2020, 75, 103043. [Google Scholar] [CrossRef]
- Roy, A.; Sharma, L.; Chakraborty, I.; Panja, S.; Ojha, V.N.; De, S. An FPGA based all-in-one function generator, lock-in amplifier and auto-relockable PID system. J. Instrum. 2019, 14, P05012. [Google Scholar] [CrossRef]
- Hernandez, A.; Garcia, E.; Gualda, D.; Villadangos, J.M.; Nombela, F.; Urena, J. FPGA-Based Architecture for Managing Ultrasonic Beacons in a Local Positioning System. IEEE Trans. Instrum. Meas. 2017, 66, 1954–1964. [Google Scholar] [CrossRef]
- Tasca, L.C.; de Freitas, E.P.; Wagner, F.R. Enhanced architecture for programmable logic controllers targeting performance improvements. Microprocess. Microsyst. 2018, 61, 306–315. [Google Scholar] [CrossRef]
- Aboelaze, M.; Shehata, M.G. Implementation of multiple PID controllers on FPGA. In Proceedings of the 2015 IEEE International Conference on Electronics, Circuits, and Systems (ICECS), Cairo, Egypt, 6–9 December 2015; pp. 446–449. [Google Scholar] [CrossRef]
- Grout, I.A.; Burge, S.E.; Dorey, A.P. Design and testing of a PI controller ASIC. Microprocess. Microsyst. 1995, 19, 15–22. [Google Scholar] [CrossRef]
- Bhandari, A.S.; Chaudhuri, A.; Roy, S.; Negi, S.; Sharad, M. Single chip self-tunable N-input N-output PID control system with integrated analog front-end for miniature robotics. In Proceedings of the 2017 IEEE 14th International Conference on Networking, Sensing and Control (ICNSC), Calabria, Italy, 16–18 May 2017; pp. 109–114. [Google Scholar] [CrossRef] [Green Version]
- Neelamegam, P.; Kumaravel, S.; Raghunathan, R. Microcontroller Based Distributed Monitoring System for Fresh Water Fish Aquaculture. Instrum. Sci. Technol. 2008, 36, 515–524. [Google Scholar] [CrossRef]
- Dhanabalan, G.; Tamil Selvi, S. Design of parallel conversion multichannel analog to digital converter for scan time reduction of programmable logic controller using FPGA. Comput. Stand. Interfaces 2015, 39, 12–21. [Google Scholar] [CrossRef]
- Milanovic, M.; Truntic, M.; Slibar, P.; Dolinar, D. Reconfigurable digital controller for a buck converter based on FPGA. Microelectron. Reliab. 2006, 47, 150–154. [Google Scholar] [CrossRef]
- Chan, Y.F.; Moallem, M.; Wang, W. Design and Implementation of Modular FPGA-Based PID Controllers. IEEE Trans. Ind. Electron. 2007, 54, 1898–1906. [Google Scholar] [CrossRef]
- Astrom, K.J.; Hagglund, T. The future of PID control. Control. Eng. Pract. 2011, 9, 1163–1175. [Google Scholar] [CrossRef]
- Chen, D.G.; Tang, F.; Law, M.-K.; Zhong, X.; Bermak, A. A 64 fJ/step 9-bit SAR ADC Array with Forward Error Correction and Mixed-Signal CDS for CMOS Image Sensors. IEEE Trans. Circuits Syst. I Regul. Pap. 2014, 61, 3085–3093. [Google Scholar] [CrossRef]
- Dhanabalan, G.; Murugan, T. FPGA design of SAR type ADC based analog input module for industrial applications. In Advances in VLSI and Embedded Systems, Lecture Notes in Electrical Engineering; Patel, Z., Gupta, S., Kumar, Y.B.N., Eds.; Springer: Singapore, 2020; Volume 676. [Google Scholar]
- Alabdo, A.; Pérez, J.; Garcia, G.J.; Pomares, J.; Torres, F. FPGA-based architecture for direct visual control robotic systems. Mechatronics 2016, 39, 204–216. [Google Scholar] [CrossRef]
- Sinha, S.; Kachhap, R.V.; Mandal, N. Design and development of a capacitance-based wireless pressure transmitter. IET Sci. Meas. Technol. 2018, 12, 858–864. [Google Scholar] [CrossRef]
- Datta, J.; Chowdhuri, S.; Bera, J.; Sarkar, G. Remote monitoring of different electrical parameters of multi-machine system using PC. Measurement 2012, 45, 118–125. [Google Scholar] [CrossRef]
- Ionel, R.; Vasiu, G.; Mischie, S. GPRS based data acquisition and analysis system with mobile phone control. Measurement 2012, 45, 1462–1470. [Google Scholar] [CrossRef]
- Rieger, R.; Huang, Y.-R. A Custom-Design Data Logger Core for Physiological Signal Recording. IEEE Trans. Instrum. Meas. 2010, 60, 532–538. [Google Scholar] [CrossRef]
- ControlLogix I/O Specifications. 2019. Available online: https://literature.rockwellautomation.com/idc/groups/literature/documents/td/1756-td002_-en-e.pdf (accessed on 1 July 2019).
- Estimated Execution Time and Memory Use for Logix5000 Controller Instructions. 2019. Available online: https://literature.rockwellautomation.com/idc/groups/literature/documents/rm/logix-rm002_-en-p.pdf (accessed on 1 July 2019).
- Series 90 TM -30/20/Micro PLC CPU Instruction Set. 2002. Available online: http://www.cimtecautomation.com/documents/techsupport/Series9030/Manuals/gfk-0467lSeries90-30-20-MicroPLCCPUInstructionSetReferenceManual.pdf (accessed on 1 July 2019).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware Resource Name | Number of Closed-Loop Control Systems | Available Hardware Resources | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Hardware Resources Used | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | ||
| Number of Slices | 112 | 242 | 359 | 468 | 583 | 693 | 807 | 916 | 14,752 |
| Number of Slice flip flops | 107 | 213 | 310 | 406 | 502 | 599 | 695 | 792 | 29,504 |
| Number of 4input LUTs | 200 | 429 | 635 | 832 | 1029 | 1221 | 1422 | 1613 | 29,504 |
| Number of bonded IOBs | 19 | 36 | 53 | 70 | 87 | 104 | 121 | 138 | 376 |
| Number of MULT18X18SIOs | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 36 |
| Number of GCLKs | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 24 |
| Resource Utilization in percentage (%) | 0.76 | 1.64 | 2.43 | 3.17 | 3.95 | 4.7 | 5.47 | 6.21 | |
| 0.36 | 0.72 | 1.05 | 1.38 | 1.7 | 2.03 | 2.36 | 2.68 | ||
| 0.68 | 1.45 | 2.15 | 2.82 | 3.49 | 4.14 | 4.82 | 5.47 | ||
| 5.05 | 9.57 | 14.1 | 18.62 | 23.14 | 27.66 | 32.18 | 36.7 | ||
| 5.56 | 11.11 | 16.67 | 22.22 | 27.78 | 33.33 | 38.89 | 44.44 | ||
| 8.33 | 12.5 | 16.67 | 20.83 | 25 | 29.17 | 33.33 | 37.5 | ||
| Hardware Resource Name | Number of Closed-Loop Control Systems | Available Hardware Resources | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Hardware Resources Used | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | ||
| Number of Slice Registers | 93 | 167 | 241 | 314 | 387 | 461 | 534 | 608 | 126,576 |
| Number of Slice LUTs | 131 | 271 | 389 | 505 | 633 | 738 | 863 | 977 | 63,288 |
| Number of fully used LUT-FF pairs | 87 | 155 | 222 | 290 | 357 | 427 | 492 | 559 | 1026 |
| Number of bonded IOBs | 19 | 36 | 53 | 70 | 87 | 104 | 121 | 138 | 296 |
| Number of BUFG/BUFGCTRLs | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 8 | 16 |
| Number of DSP48A1s | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 180 |
| Resource Utilization in percentage (%) | 0.07 | 0.13 | 0.19 | 0.25 | 0.31 | 0.36 | 0.42 | 0.48 | |
| 0.21 | 0.43 | 0.61 | 0.8 | 1 | 1.17 | 1.36 | 1.54 | ||
| 8.48 | 15.11 | 21.64 | 28.27 | 34.8 | 41.62 | 47.95 | 54.48 | ||
| 6.42 | 12.16 | 17.91 | 23.65 | 29.39 | 35.14 | 40.88 | 46.62 | ||
| 12.5 | 18.75 | 25 | 31.25 | 37.5 | 43.75 | 50 | 50 | ||
| 1.11 | 2.22 | 3.33 | 4.44 | 5.56 | 6.67 | 7.78 | 8.89 | ||
| Hardware Resource Name | Number of Closed-Loop Control Systems | Available Hardware Resources | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Hardware Resources Used | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | ||
| Number of Slice Registers | 107 | 197 | 286 | 374 | 462 | 551 | 639 | 728 | 207,360 |
| Number of Slice LUTs | 138 | 243 | 354 | 460 | 570 | 675 | 784 | 892 | 207,360 |
| Number of fully used LUT-FF pairs | 87 | 152 | 219 | 285 | 354 | 418 | 484 | 551 | 1069 |
| Number of bonded IOBs | 19 | 36 | 53 | 70 | 87 | 104 | 121 | 138 | 960 |
| Number of BUFG/BUFGCTRLs | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 32 |
| Resource Utilization in percentage (%) | 0.05 | 0.1 | 0.14 | 0.18 | 0.22 | 0.27 | 0.31 | 0.35 | |
| 0.07 | 0.12 | 0.17 | 0.22 | 0.27 | 0.33 | 0.38 | 0.43 | ||
| 8.14 | 14.22 | 20.49 | 26.66 | 33.12 | 39.1 | 45.28 | 51.54 | ||
| 1.98 | 3.75 | 5.52 | 7.29 | 9.06 | 10.83 | 12.6 | 14.38 | ||
| 6.25 | 9.38 | 12.5 | 15.63 | 18.75 | 21.88 | 25 | 28.13 | ||
| Number of Closed-Loop Control Systems | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| XC3S1600E-4-FG484 (SPARTAN3E) | 17.278 | 18.58 | 18.58 | 18.58 | 18.58 | 18.58 | 18.58 | 18.58 |
| XC6SLX100T-4-CSG484 (SPARTAN6) | 12.655 | 12.576 | 12.576 | 12.576 | 12.576 | 12.576 | 12.576 | 12.576 |
| XC5VLX330T-2-FF1738 (VIRTEX5) | 4.026 | 5.418 | 5.418 | 5.418 | 5.418 | 5.418 | 5.418 | 5.418 |
| Number of Closed-Loop Control Systems | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| Delay time of comparator with DAC0808 (ms) | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 |
| FPGA logic delay time (XC3S1600E-4-FG484 (SPARTAN3E)) (ns) | 138.224 | 148.64 | 148.64 | 148.64 | 148.64 | 148.64 | 148.64 | 148.64 |
| Total delay time of closed-loop control system (ms) | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 |
| FPGA logic delay time (XC6SLX100T-4-CSG484 (SPARTAN6)) (ns) | 101.24 | 100.608 | 100.608 | 100.608 | 100.608 | 100.608 | 100.608 | 100.608 |
| Total delay time of closed-loop control system (ms) | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 |
| FPGA logic delay time (XC5VLX330T-2-FF1738 (VIRTEX5)) (ns) | 32.208 | 43.344 | 43.344 | 43.344 | 43.344 | 43.344 | 43.344 | 43.344 |
| Total delay time of closed-loop control system (ms) | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 | 18.96 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dhanabalan, G.; Tamil Selvi, S.; Mahdal, M. Scan Time Reduction of PLCs by Dedicated Parallel-Execution Multiple PID Controllers Using an FPGA. Sensors 2022, 22, 4584. https://doi.org/10.3390/s22124584
Dhanabalan G, Tamil Selvi S, Mahdal M. Scan Time Reduction of PLCs by Dedicated Parallel-Execution Multiple PID Controllers Using an FPGA. Sensors. 2022; 22(12):4584. https://doi.org/10.3390/s22124584
Chicago/Turabian StyleDhanabalan, Gnanasekaran, Sankar Tamil Selvi, and Miroslav Mahdal. 2022. "Scan Time Reduction of PLCs by Dedicated Parallel-Execution Multiple PID Controllers Using an FPGA" Sensors 22, no. 12: 4584. https://doi.org/10.3390/s22124584
APA StyleDhanabalan, G., Tamil Selvi, S., & Mahdal, M. (2022). Scan Time Reduction of PLCs by Dedicated Parallel-Execution Multiple PID Controllers Using an FPGA. Sensors, 22(12), 4584. https://doi.org/10.3390/s22124584