
Fast Determination of Satellite-to-Moon Visibility Using an Adaptive Interpolation Method Based on Vertex Protection



Abstract
:1. Introduction
2. Mathematical Models
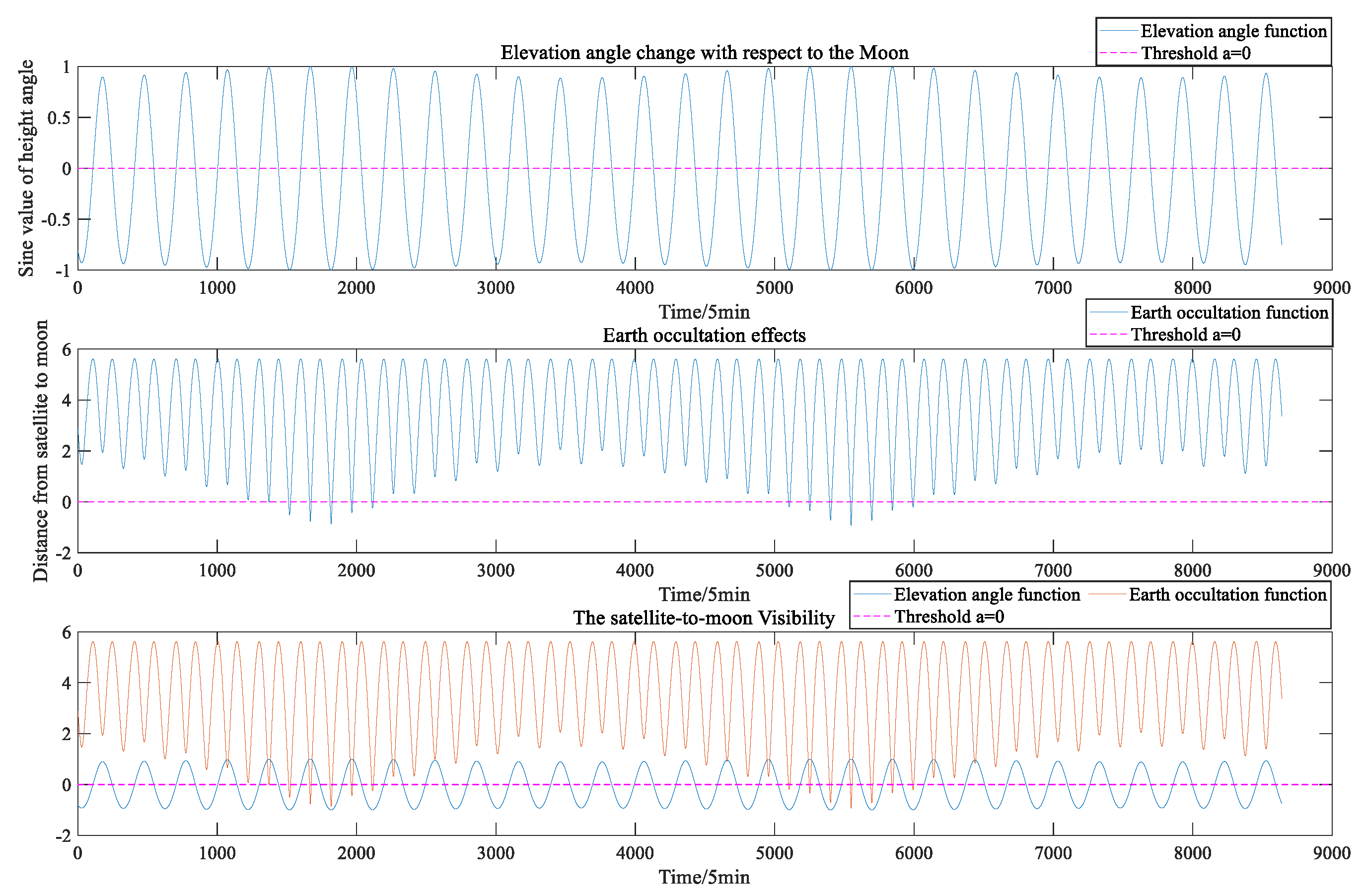
2.1. Elevation Angle Function
2.2. Earth Occultation
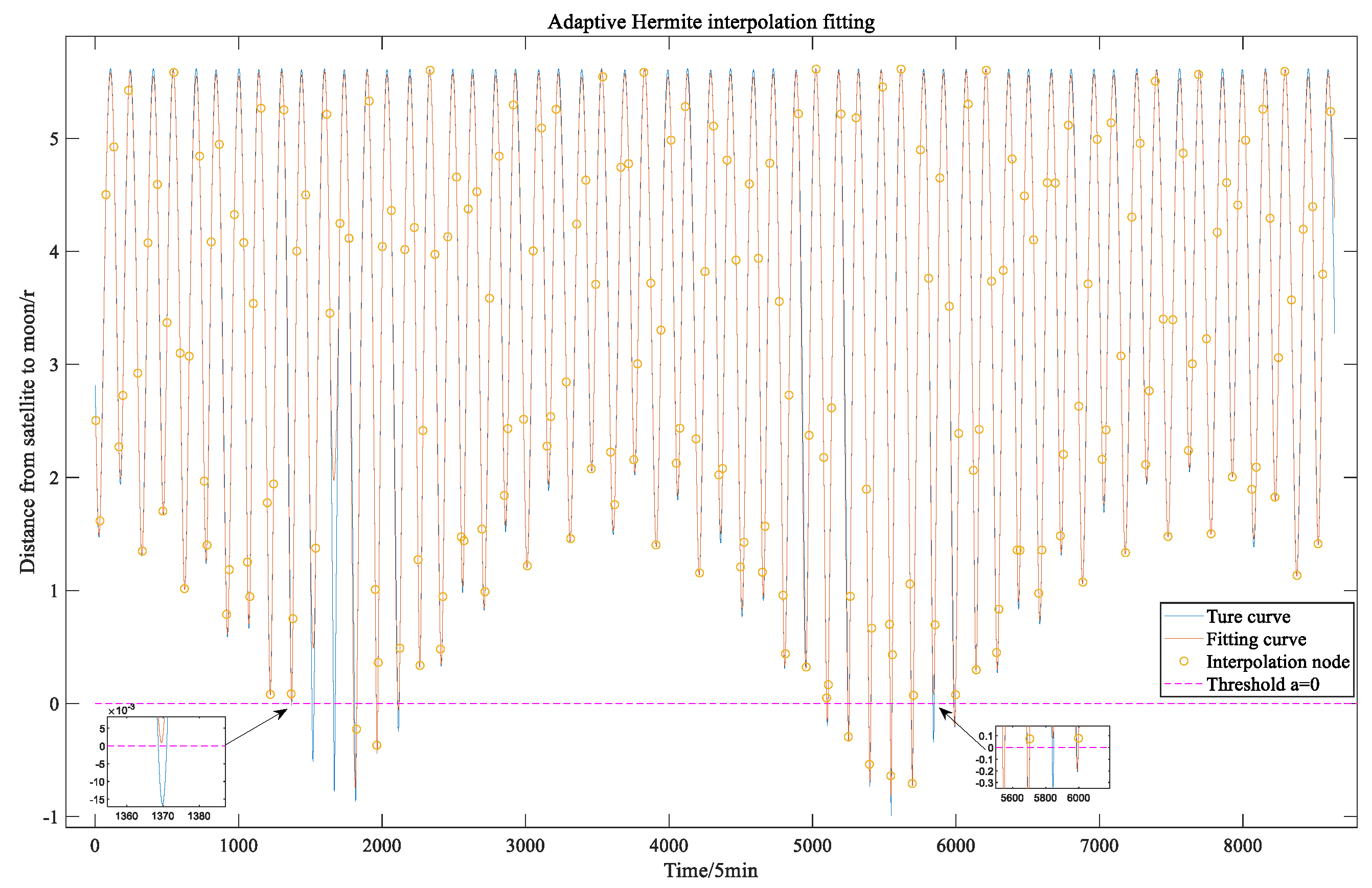
2.3. Adaptive Interpolation Algorithm
3. Algorithm Design
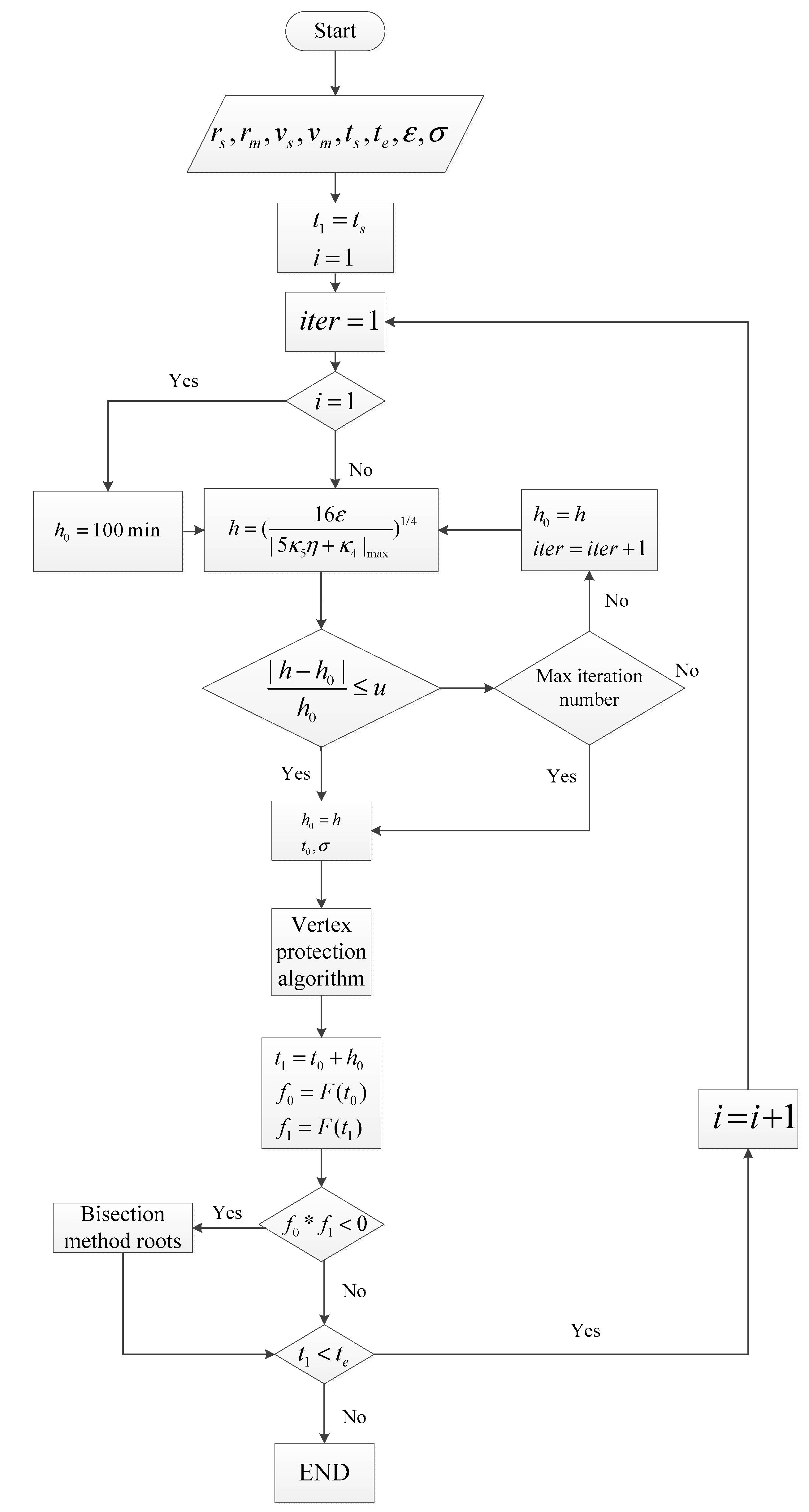
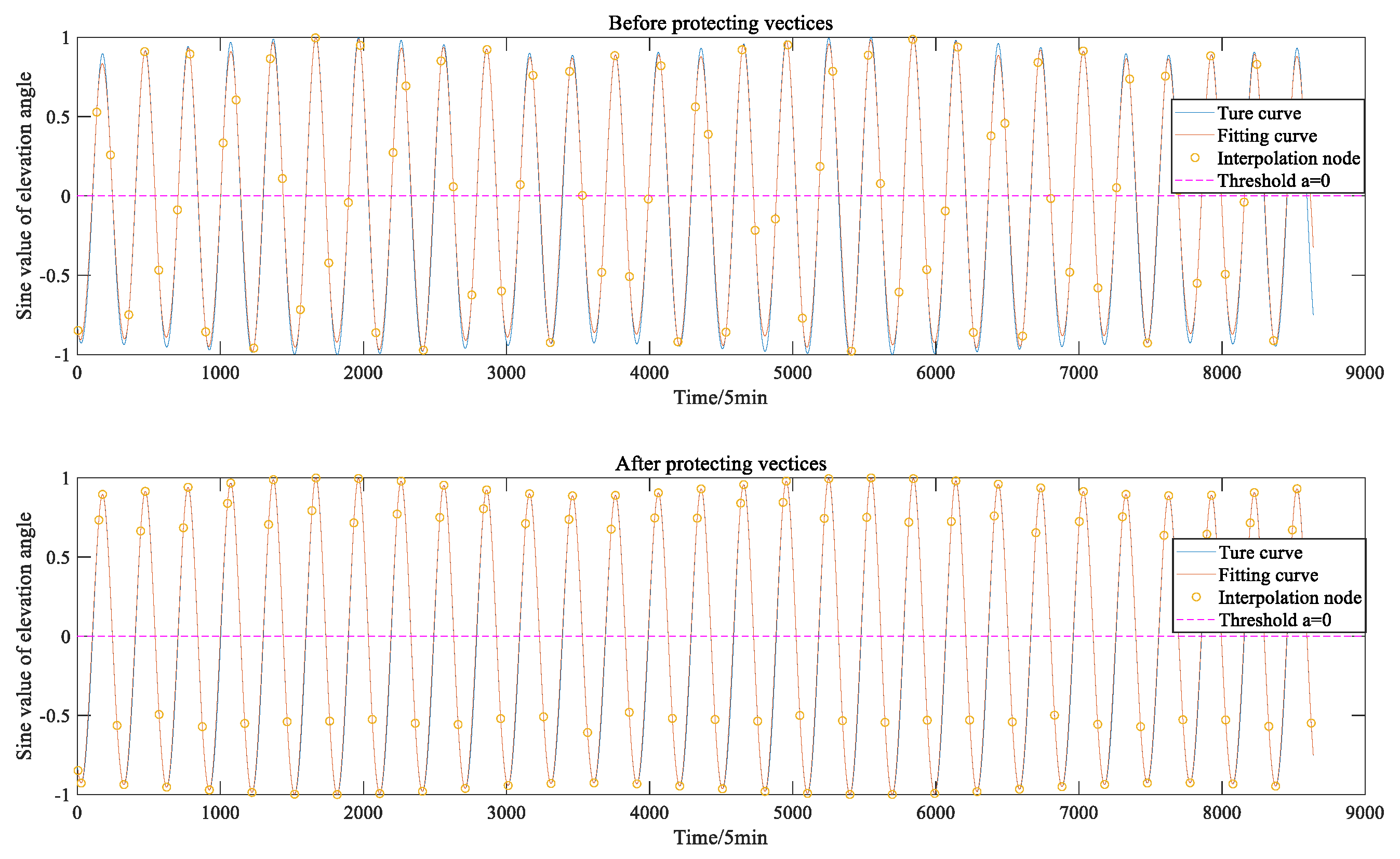
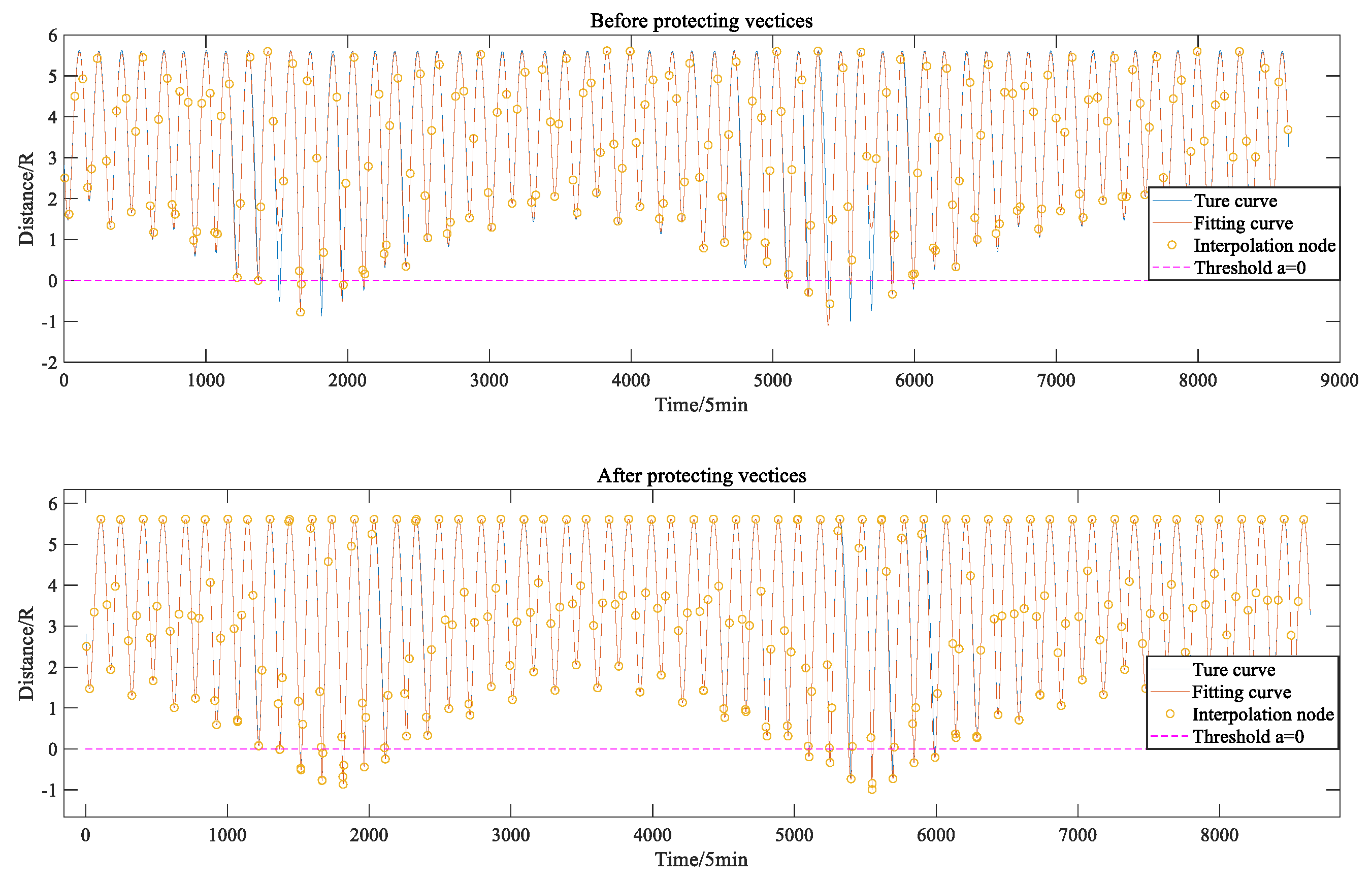
3.1. Vertex Protection Algorithm
3.2. Adaptive Interpolation Based on Vertex Protection
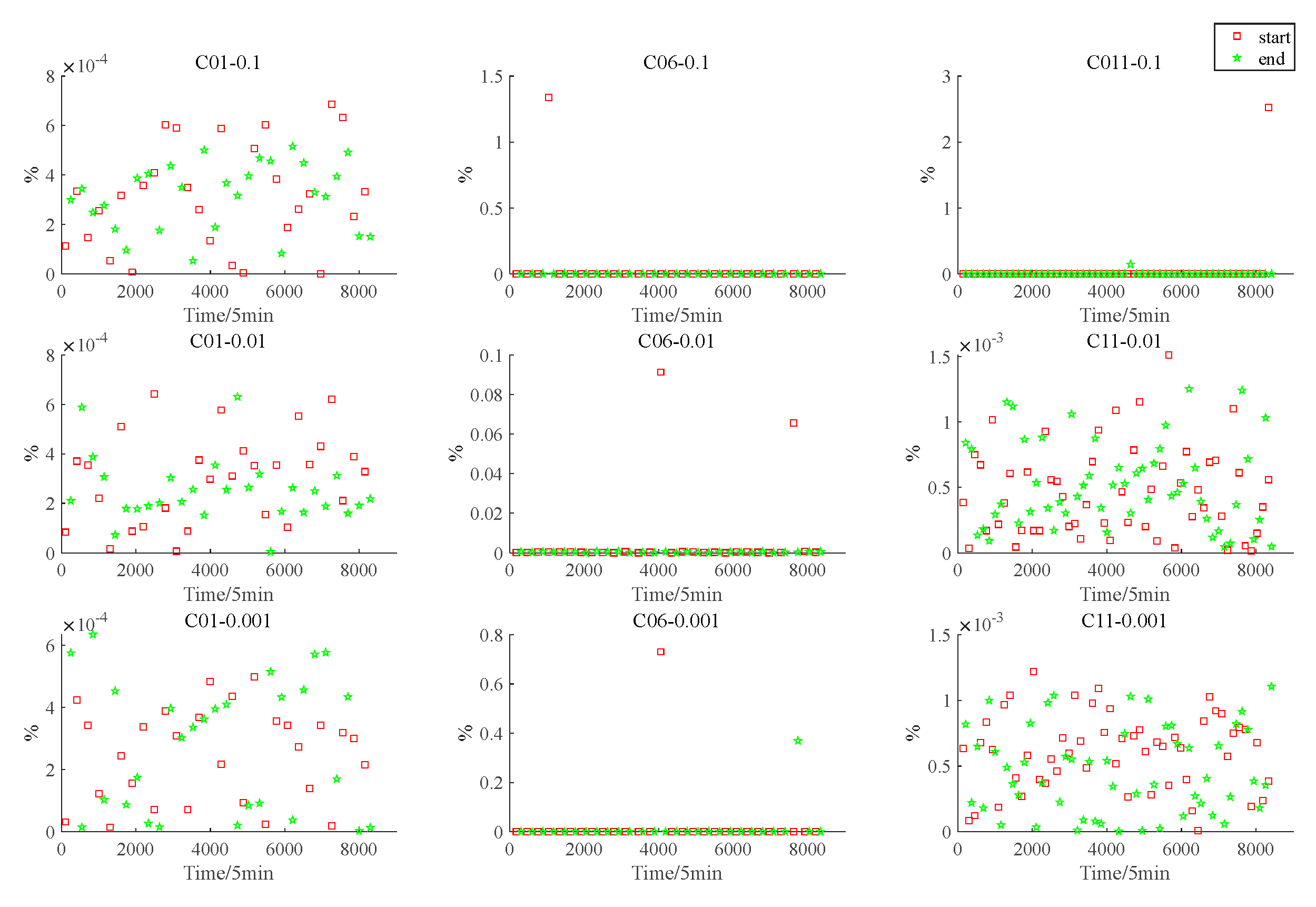
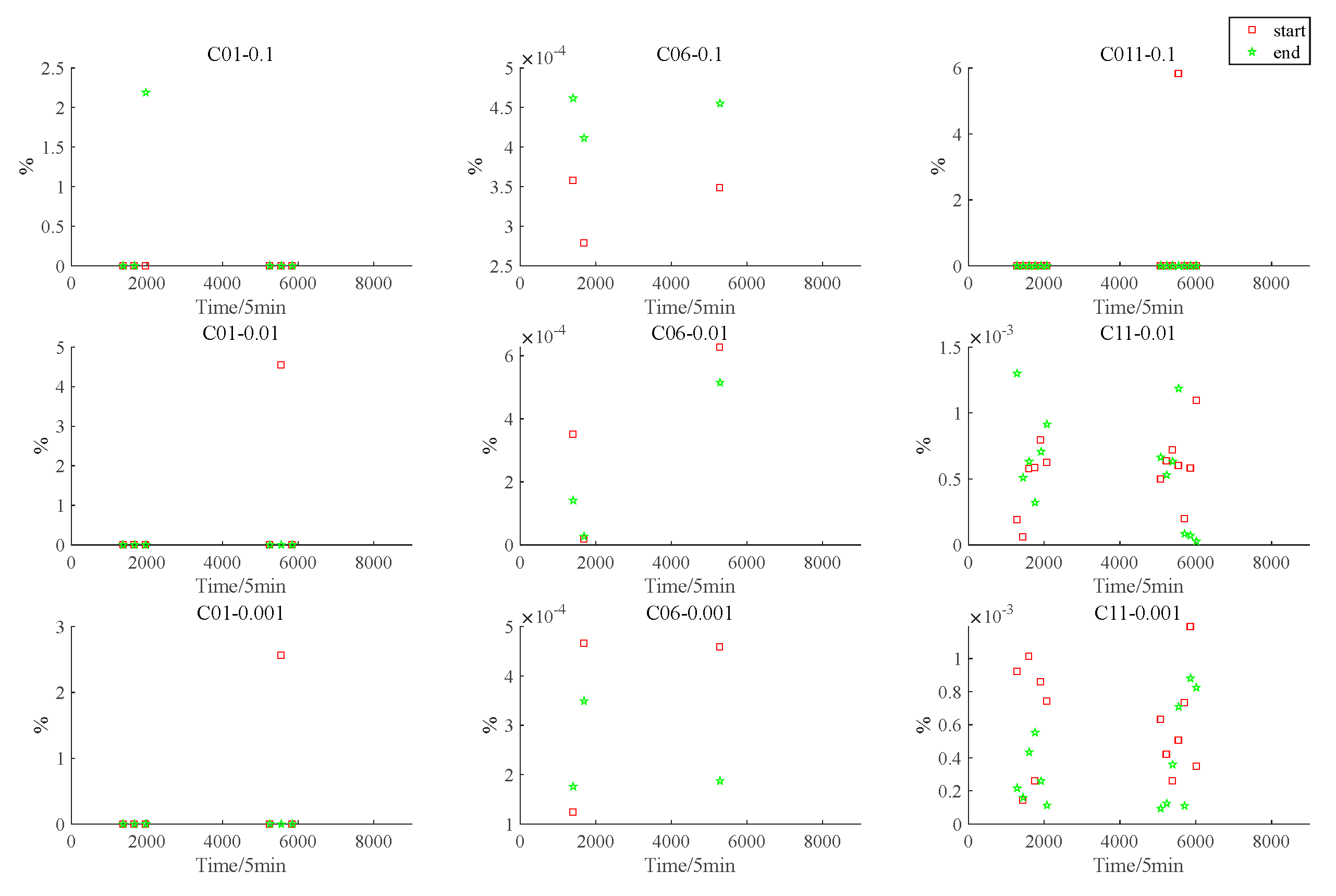
4. Experiment and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jin, S. Recent progresses on Beidou/COMPASS and other global navigation satellite systems (GNSS)—I. Adv. Space Res. 2013, 51, 941. [Google Scholar] [CrossRef]
- Yang, D.; Yang, J.; Xu, P. Timeslot scheduling of inter-satellite links based on a system of a narrow beam with time division. GPS Solut. 2016, 21, 999–1011. [Google Scholar] [CrossRef]
- Li, Y.J.; Zhao, S.H.; Wu, J.L. A general evaluation criterion for the coverage performance of LEO constellations. Aerosp. Sci. Technol. 2016, 48, 94–101. [Google Scholar] [CrossRef]
- Ulybyshev, Y. Geometric Analysis of Low-Earth-Orbit Satellite Communication Systems: Covering Functions. J. Spacecr. Rocket. 2015, 37, 385–391. [Google Scholar] [CrossRef]
- Han, C.; Gao, X.J.; Sun, X.C. Rapid Satellite-to-Site Visibility Determination Based on Self-Adaptive Interpolation Technique. Sci. China Technol. Sci. 2017, 2, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Zhu, X.; Qiu, D.; Yang, L.T. Dynamic Scheduling for Emergency Tasks on Distributed Imaging Satellites with Task Merging. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 2275–2285. [Google Scholar] [CrossRef]
- Lawton, A.J. Numerical method for rapidly determining satellite-satellite and satellite-ground station in-view periods. J. Guid. Control. Dyn. 2015, 10, 32–36. [Google Scholar] [CrossRef]
- Alfano, S.; Negron, D.; Moore, J.L. Rapid Determination of Satellite Visibility Periods. J. Astronaut. Sci. 1992, 40, 17. [Google Scholar]
- Sun, X.; Cui, H.; Han, C.; Tang, G. Apchi Technique for Rapidly and Accurately Predicting Multi-Restriction Satellite Visibility. 2012. Available online: https://www.researchgate.net/profile/Xiucong-Sun-2/publication/270892862_APCHI_Technique_for_Rapidly_and_Accurately_Predicting_Multi-Restriction_Satellite_Visibility/links/5527bada0cf2779ab78a9b1c/APCHI-Technique-for-Rapidly-and-Accurately-Predicting-Multi-Restriction-Satellite-Visibility.pdf (accessed on 10 April 2015).
- Chao, H.; Yang, P.; Wang, X.; Liu, S. A Fast Computation Method for the Satellite-to-Site Visibility. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018. [Google Scholar]
- Wang, X.; Han, C.; Yang, P.; Sun, X. Onboard satellite visibility prediction using metamodeling based framework. Aerosp. Sci. Technol. 2019, 94, 105377.1–105377.9. [Google Scholar] [CrossRef]
- NASA Artemis Program. Available online: https://www.nasa.gov/specials/artemis/ (accessed on 21 September 2020).
- Available online: https://www.nasa.gov/feature/goddard/2019/record-breaking-satellite-advances-nasa-s-exploration-of-high-altitude-gps (accessed on 4 April 2019).
- Cheung, K.M.; Lee, C.; Heckman, D. Feasibility of “Weak GPS” Real-Time Positioning and Timing at Lunar Distance. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020. [Google Scholar]
- Schönfeldt, M.; Grenier, A.; Delépaut, A.; Swinden, R.; Giordano, P.; Ventura-Traveset, J. Across the Lunar Landscape, Space Exploration with GNSS Technology. InsideGNSS, 2 October 2020; 32–37. [Google Scholar]
- Delépaut, A.; Giordano, P.; Ventura-Traveset, J.; Blonski, D.; Schönfeldt, M.; Schoonejans, P.; Aziz, S.; Walker, R. Use of GNSS for lunar missions and plans for Lunar In-Orbit Development. Adv. Space Res. 2020, 66, 2739–2756. [Google Scholar] [CrossRef]
- Süli, E.; Mayers, D.F. An Introduction to Numerical Analysis; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Montenbruck, O.; Gill, E. Satellite Orbits; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Ali, I.; Al-Dhahir, N. Predicting the visibility of LEO satellites. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 1183–1190. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Methods | Rise and Set Times | Occlusion Times | |
|---|---|---|---|---|
| C01 GEO Satellite | Brute force method | 0.1 | 28 | 6 |
| 0.01 | 28 | 6 | ||
| 0.001 | 28 | 6 | ||
| Self-adaptive interpolation technique without vertex protection | 0.1 | 28 | 4 | |
| 0.01 | 28 | 5 | ||
| 0.001 | 28 | 6 | ||
| Self-adaptive interpolation technique with vertex protection | 0.1 | 28 | 6 | |
| 0.01 | 28 | 6 | ||
| 0.001 | 28 | 6 | ||
| C06 IGSO Satellite | Brute force method | 0.1 | 28 | 3 |
| 0.01 | 28 | 3 | ||
| 0.001 | 28 | 3 | ||
| Self-adaptive interpolation technique without vertex protection | 0.1 | 27 | 1 | |
| 0.01 | 28 | 3 | ||
| 0.001 | 28 | 3 | ||
| Self-adaptive interpolation technique with vertex protection | 0.1 | 28 | 3 | |
| 0.01 | 28 | 3 | ||
| 0.001 | 28 | 3 | ||
| C11 MEO Satellite | Brute force method | 0.1 | 53 | 13 |
| 0.01 | 53 | 13 | ||
| 0.001 | 53 | 13 | ||
| Self-adaptive interpolation technique without vertex protection | 0.1 | 53 | 12 | |
| 0.01 | 53 | 13 | ||
| 0.001 | 53 | 13 | ||
| Self-adaptive interpolation technique with vertex protection | 0.1 | 53 | 13 | |
| 0.01 | 53 | 13 | ||
| 0.001 | 53 | 13 |
| Case | After/Before | After/Before | After/Before | |||
|---|---|---|---|---|---|---|
| Step calculation times | 248 | 295 | 404 | 539 | 1104 | 1611 |
| Resolution times | 71 | 295 | 69 | 539 | 70 | 1611 |
| Run time | 98.34% | 98.8% | 98.03% | 98.2% | 96.5% | 94.6% |
| Case | After/Before | After/Before | After/Before | |||
|---|---|---|---|---|---|---|
| Step calculation times | 218 | 239 | 472 | 745 | 2990 | 6083 |
| Resolution times | 79 | 239 | 63 | 745 | 63 | 6083 |
| Run time | 98.6% | 99.2% | 98.1% | 97.6% | 93.5% | 84.6% |
| Case | After/Before | After/Before | After/Before | |||
|---|---|---|---|---|---|---|
| Step calculation times | 467 | 579 | 1318 | 2196 | 10,539 | 19,282 |
| Resolution times | 135 | 579 | 135 | 2196 | 135 | 19,282 |
| Run time | 97.5% | 98.2% | 95.0% | 93.6% | 76.2% | 47.6% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Cheng, F.; Shen, P.; Liu, D. Fast Determination of Satellite-to-Moon Visibility Using an Adaptive Interpolation Method Based on Vertex Protection. Sensors 2022, 22, 4451. https://doi.org/10.3390/s22124451
Li X, Cheng F, Shen P, Liu D. Fast Determination of Satellite-to-Moon Visibility Using an Adaptive Interpolation Method Based on Vertex Protection. Sensors. 2022; 22(12):4451. https://doi.org/10.3390/s22124451
Chicago/Turabian StyleLi, Xiaowan, Fang Cheng, Pengli Shen, and Dongliang Liu. 2022. "Fast Determination of Satellite-to-Moon Visibility Using an Adaptive Interpolation Method Based on Vertex Protection" Sensors 22, no. 12: 4451. https://doi.org/10.3390/s22124451
APA StyleLi, X., Cheng, F., Shen, P., & Liu, D. (2022). Fast Determination of Satellite-to-Moon Visibility Using an Adaptive Interpolation Method Based on Vertex Protection. Sensors, 22(12), 4451. https://doi.org/10.3390/s22124451