
Multi-Integration Time Adaptive Selection Method for Superframe High-Dynamic-Range Infrared Imaging Based on Grayscale Information


Abstract
:1. Introduction
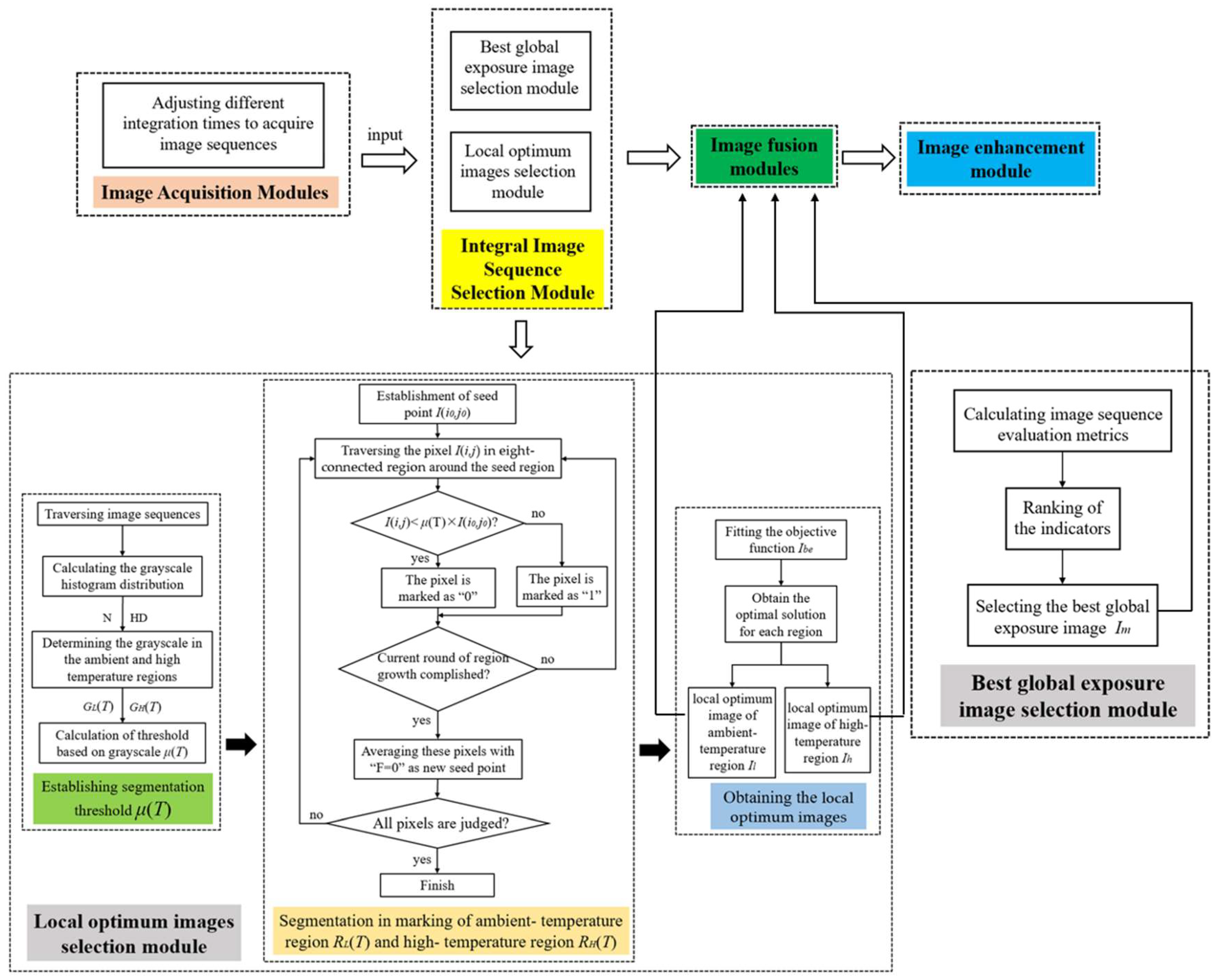
2. Materials and Methods
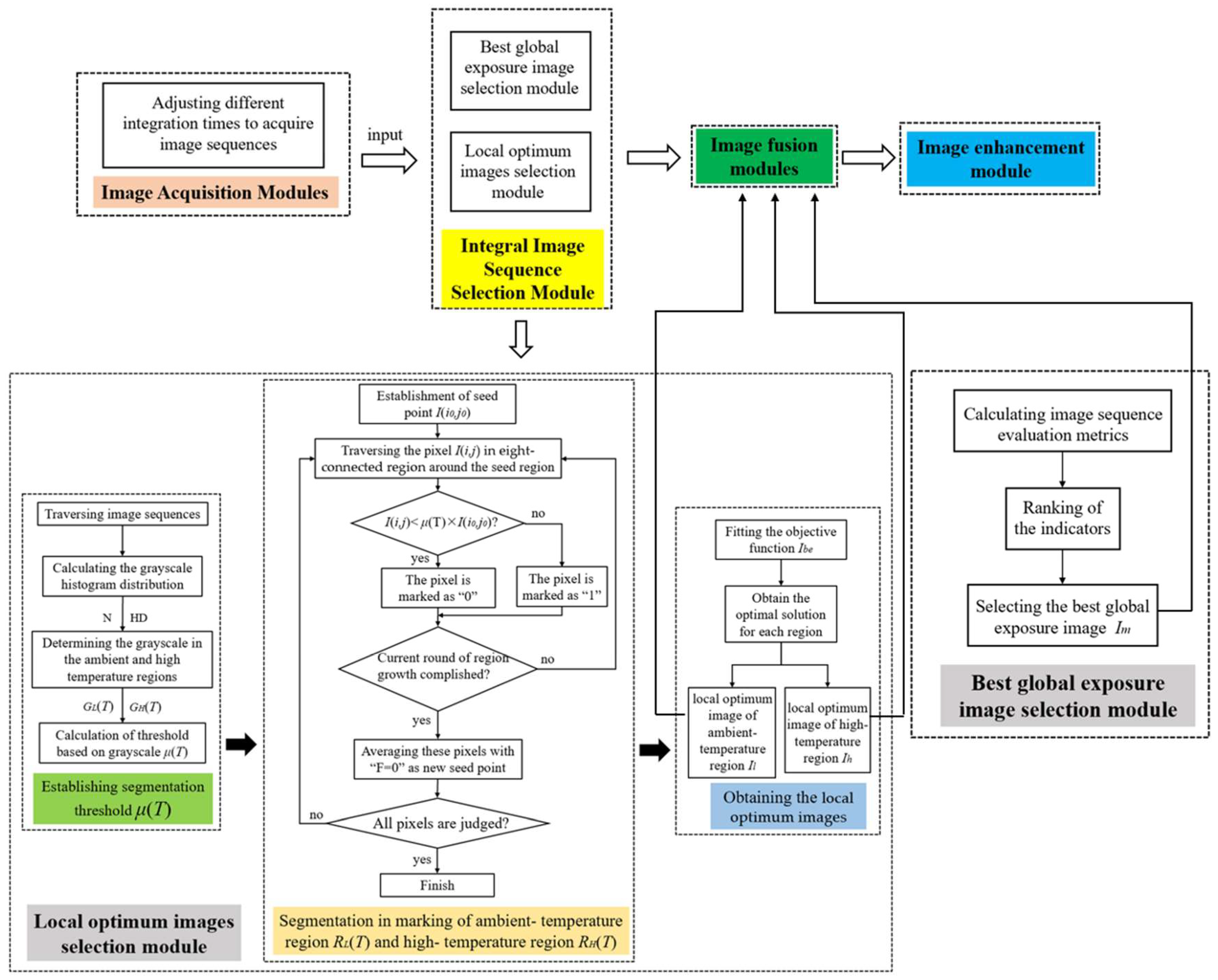
2.1. Local Optimum Images Selection Based on Region-Growing Point Segmentation
2.2. Best Global Exposure Image Selection Based on the Information Evaluation
2.2.1. Selection of Image Quality Evaluation Indicators
- (1)
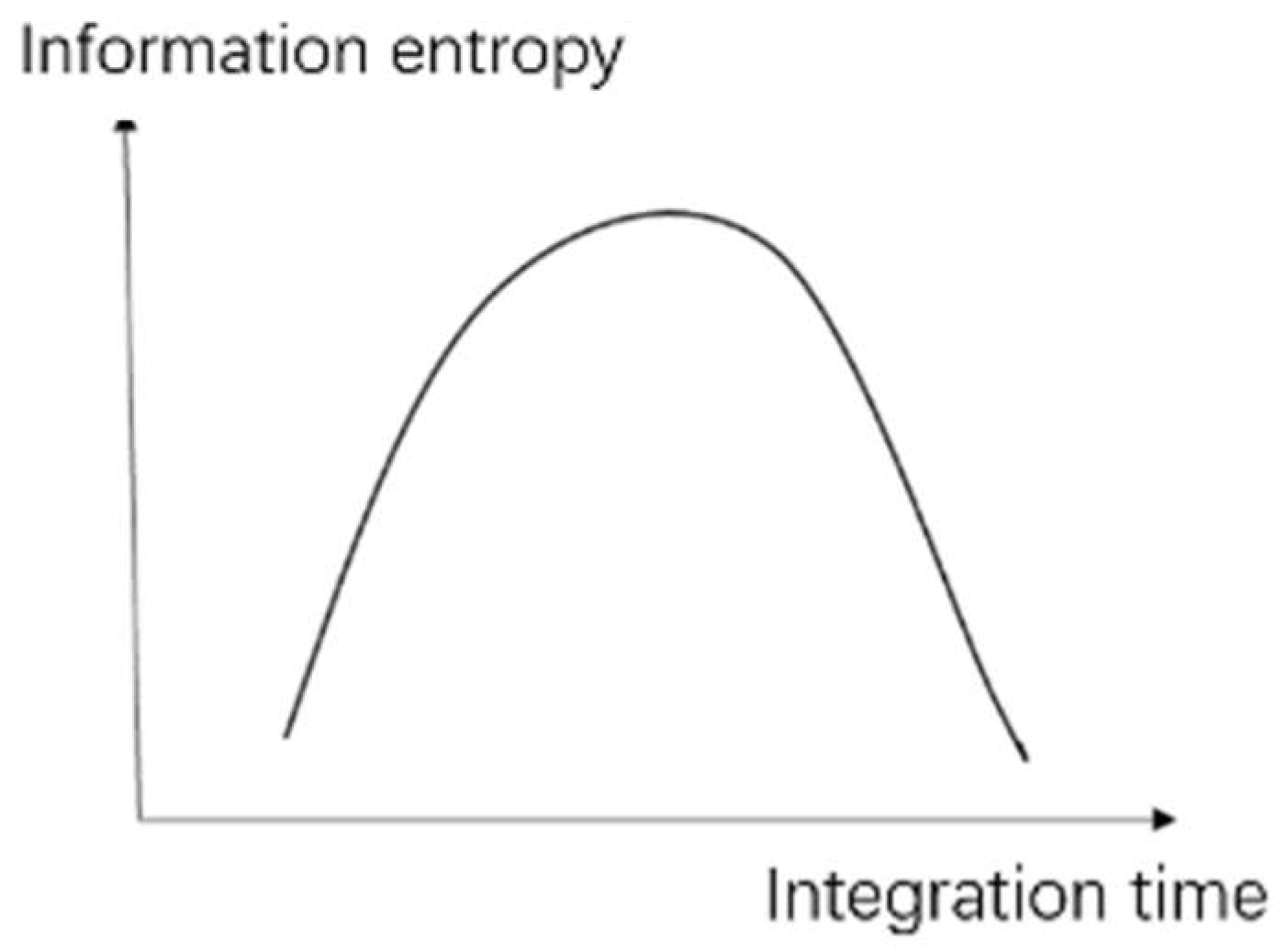
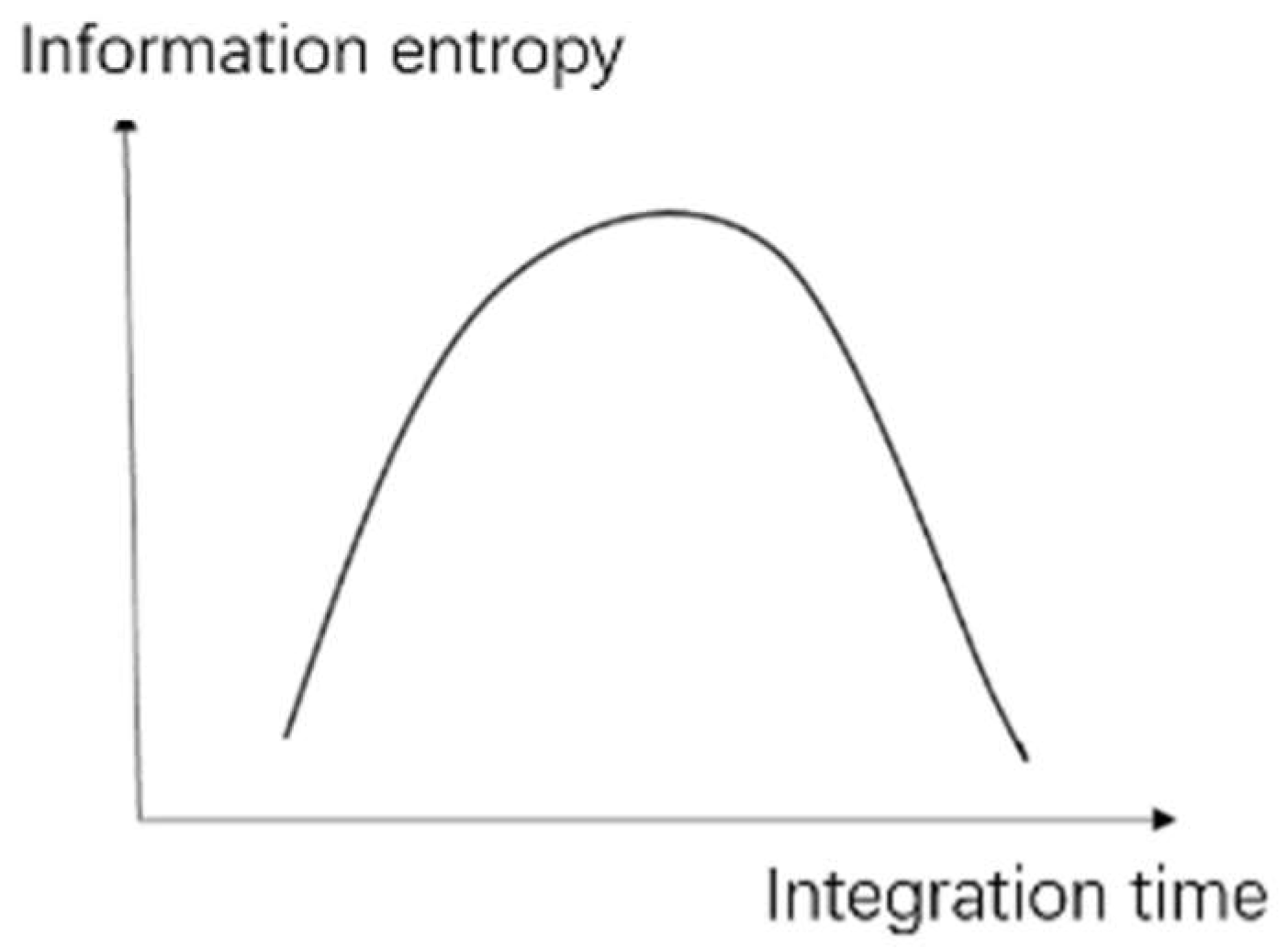
- Information entropy
- (2)
- Image gradient
- (3)
- Average grayscale and grayscale average variance
2.2.2. Selecting the Best Global Exposure Image Based on Image Quality Evaluation Indicators
2.3. Image Fusion and Enhancement
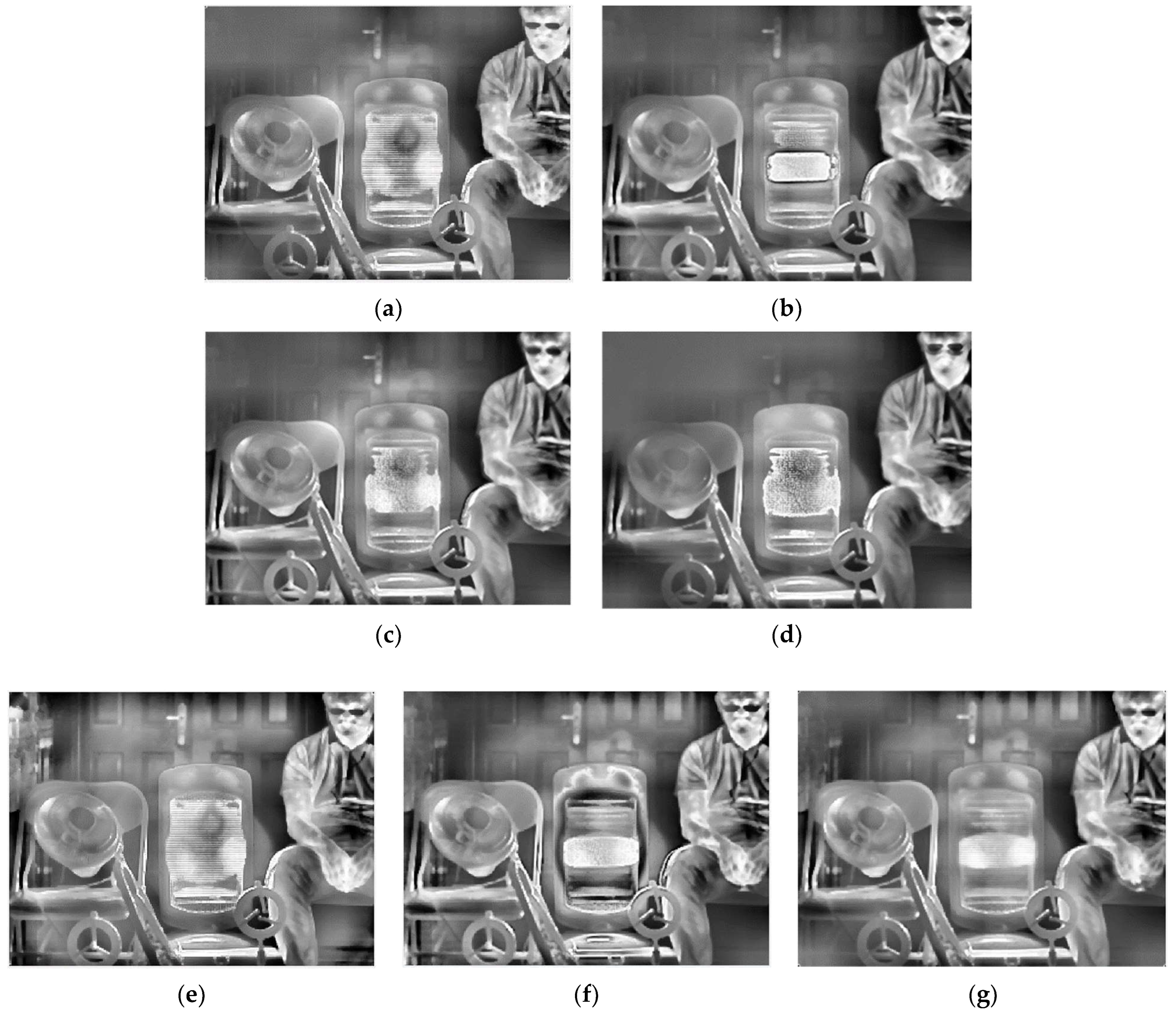
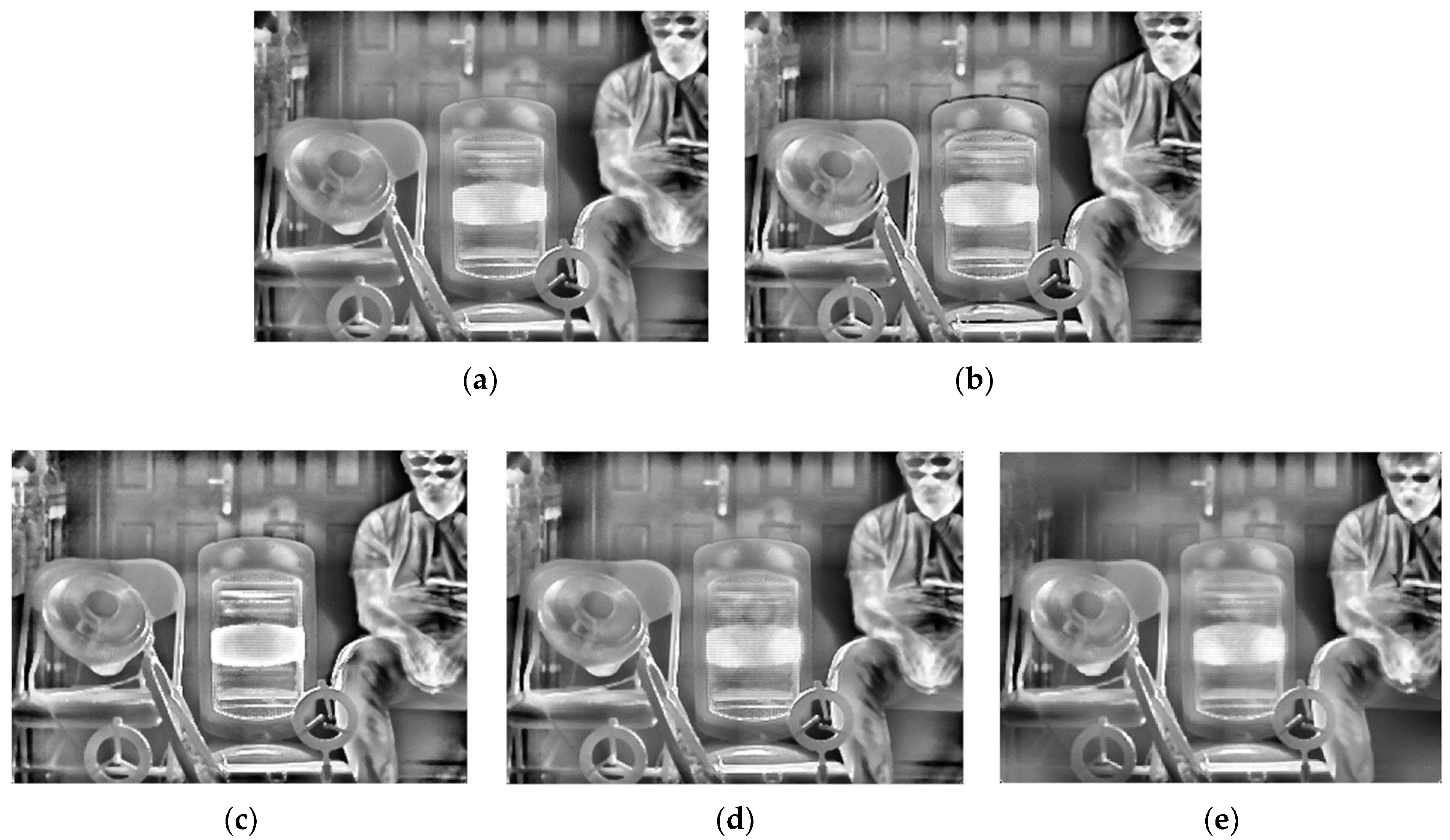
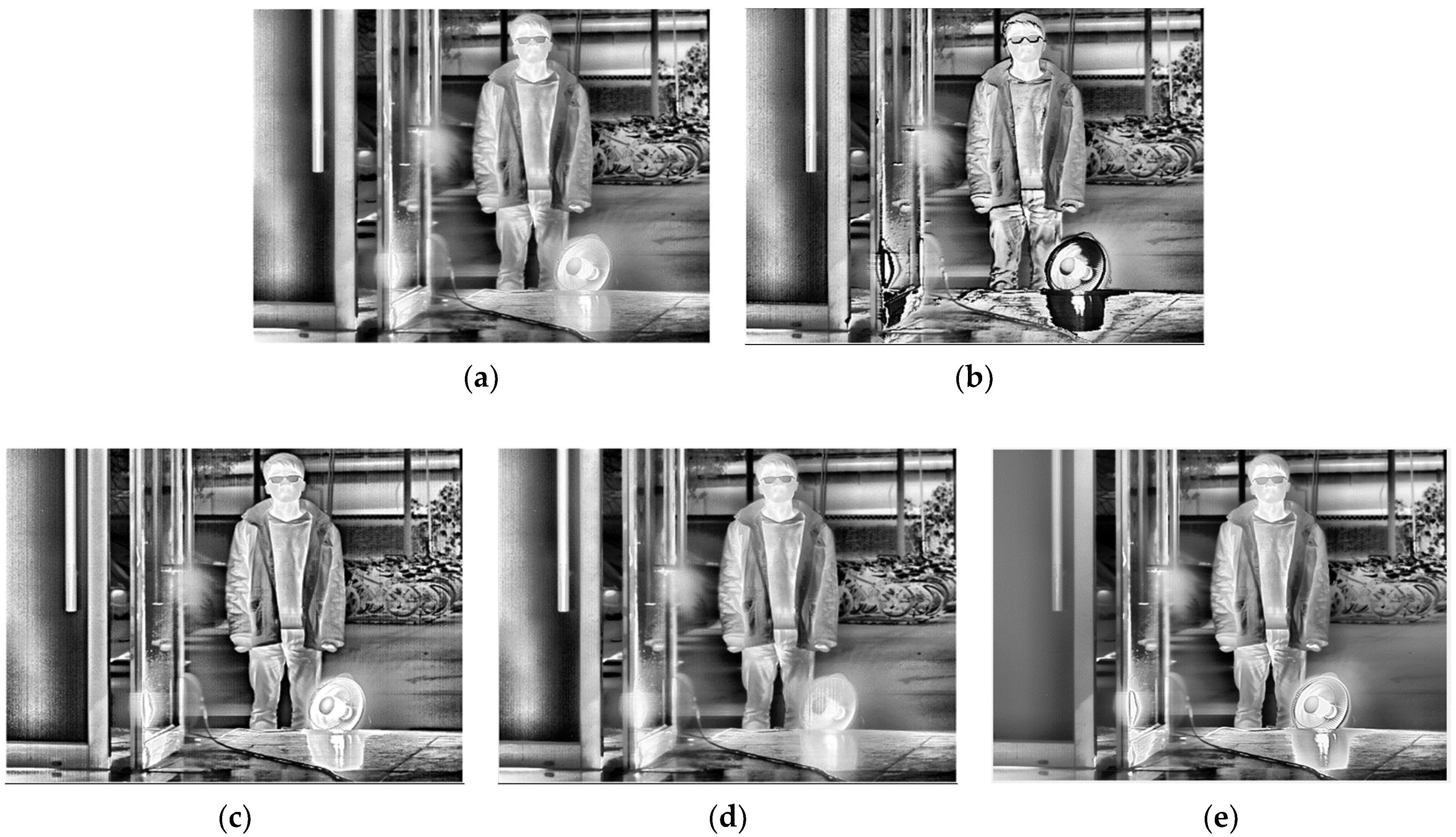
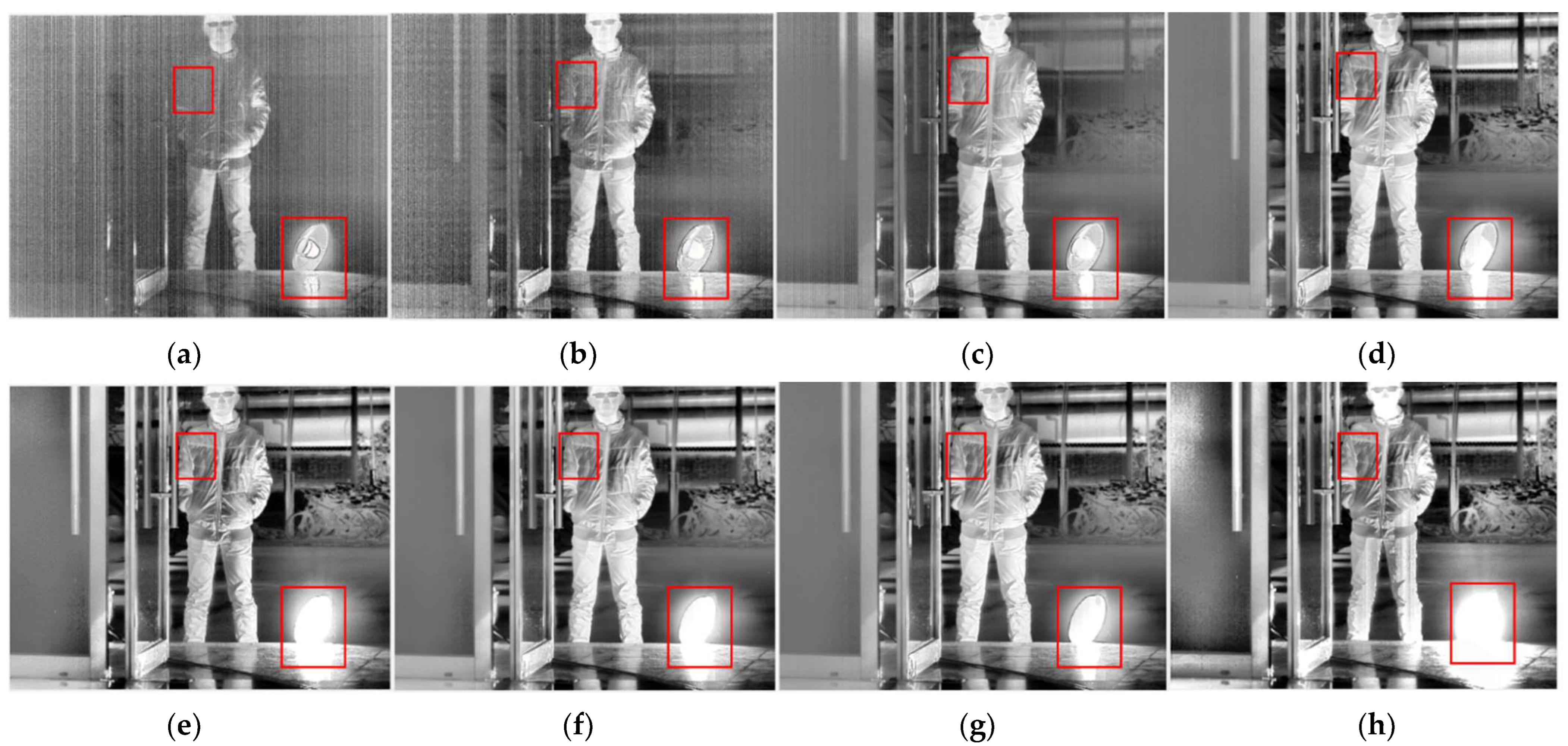
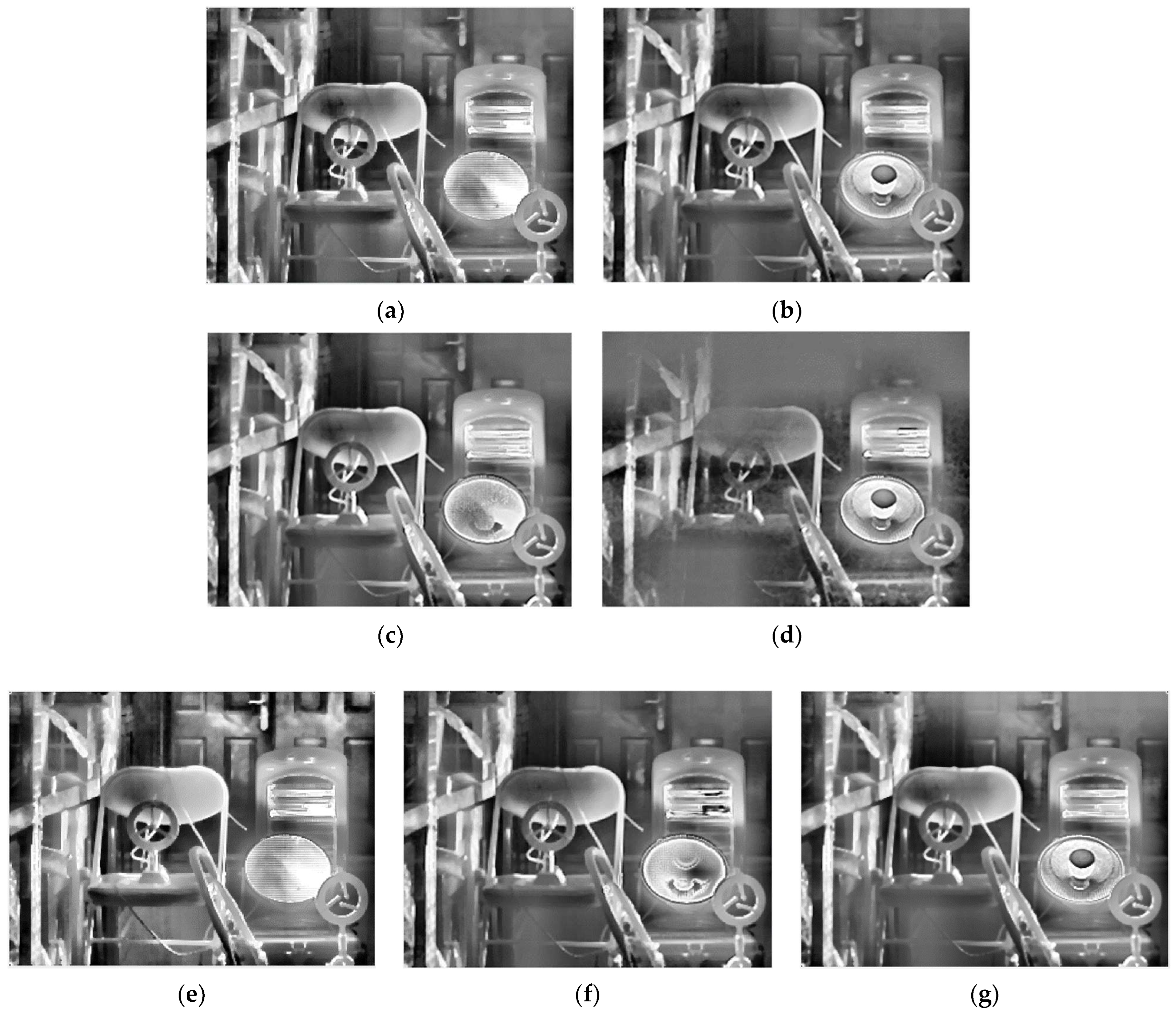
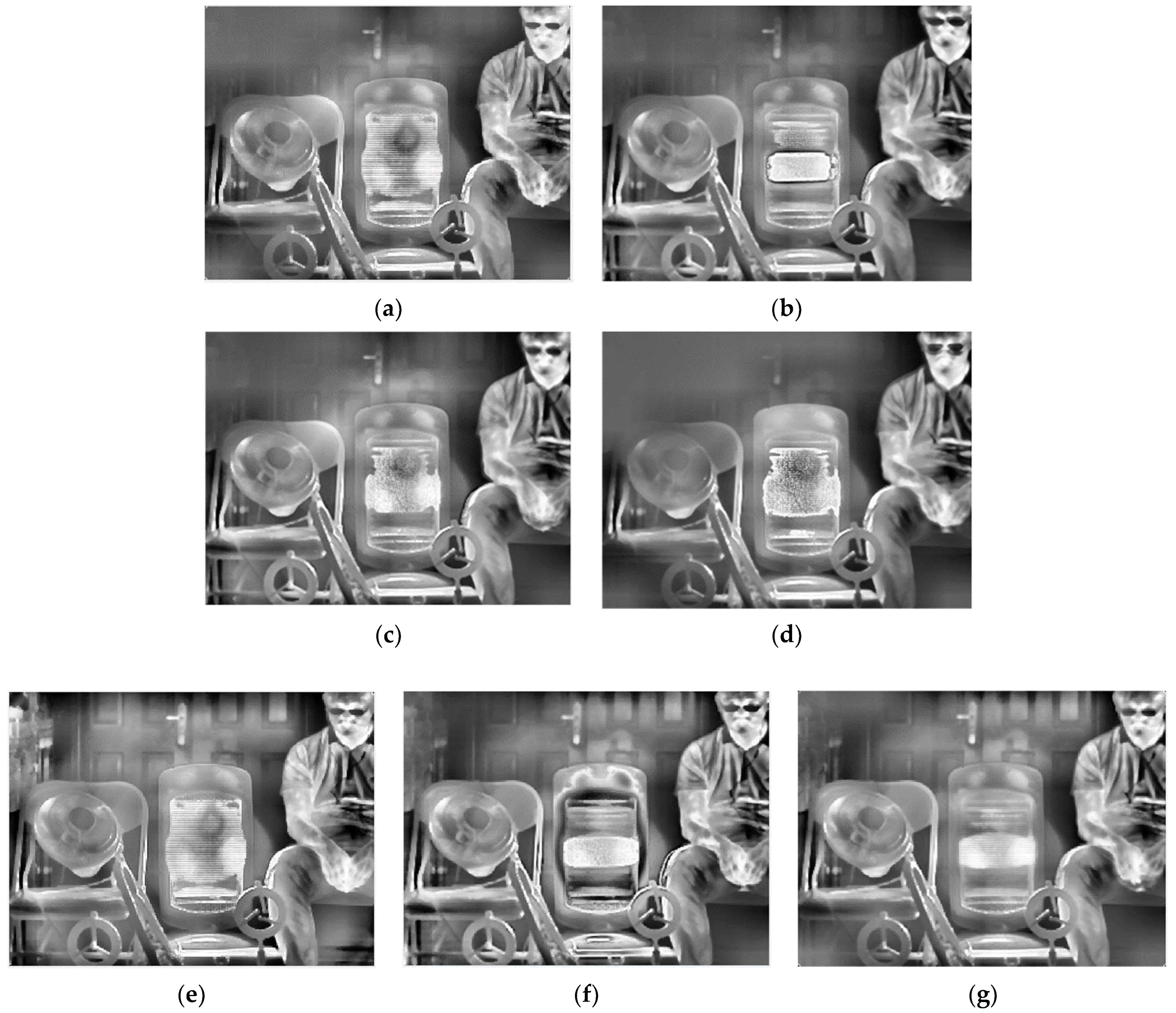
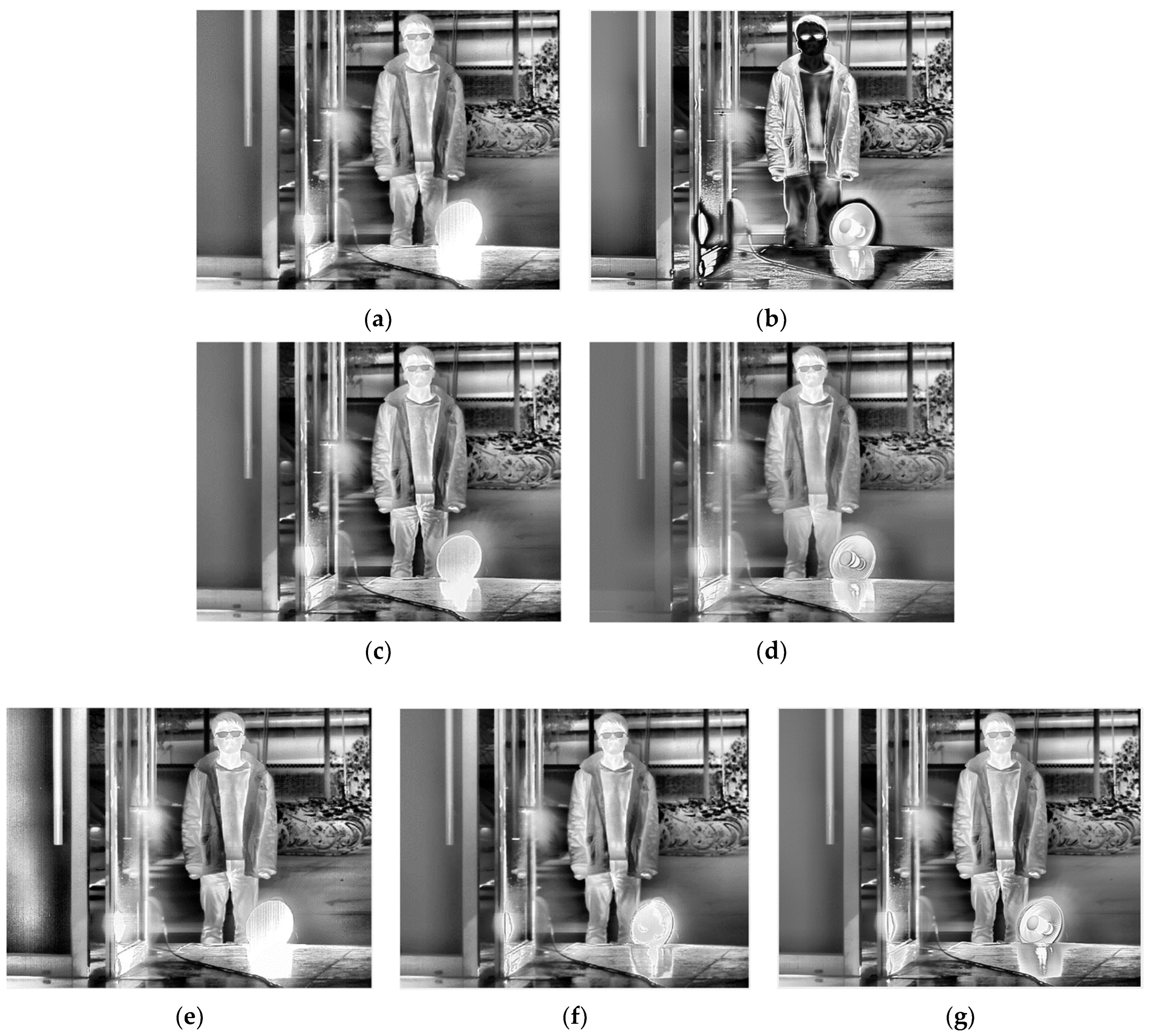
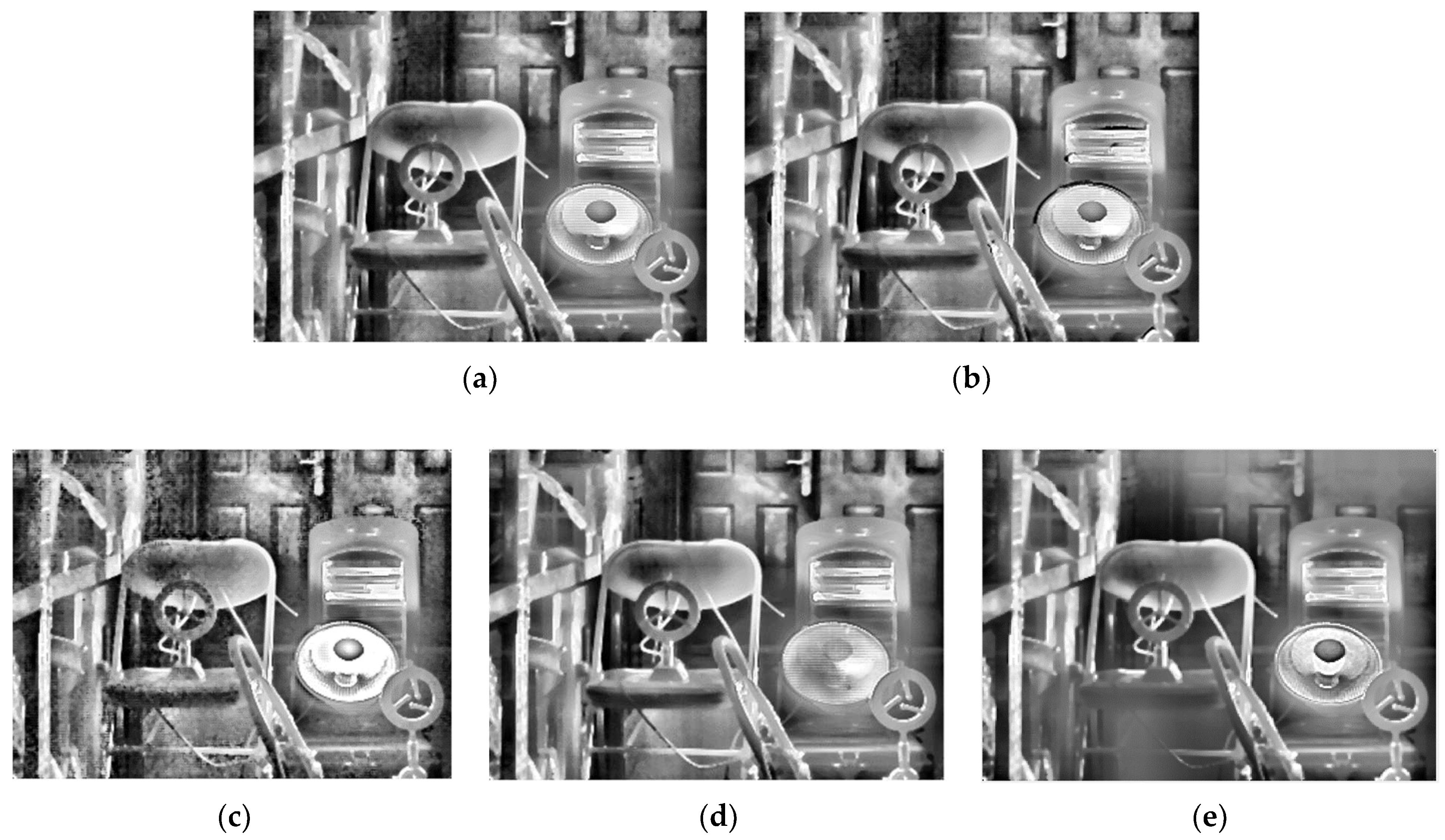
3. Experimental Comparison Results
- (1)
- The empirical selection method [2], called ES, selects four different temperatures of objects to be imaged separately and adjusts the integration time so that the average grayscale value is closest to the medium grayscale value to determine the four integration times.
- (2)
- The image-evaluation-indicator-based method, called EI, selects image-based image evaluation indicators only. The selection principle is that the information entropy, gradient difference, average grayscale, and average grayscale square difference of each image in the sequence are calculated, and the best image corresponding to each of the four indicators is selected for fusion. The calculation results may have overlapping parts (as shown in Table 2).
- (3)
- The maximum gradient difference method [12], called MGD, calculates the Laplace gradient for the image sequence, and the two images with the greatest gradient difference are selected as the fused images.
- (4)
- The multi-region mean weighting + information entropy selection method [29], called MW&EN, adjusts the integration time of the next image frame by calculating the grayscale weighting of different regions so that the average grayscale is close to the desired mean value, and when the adjustment appears to be overshot, the integration time is adjusted using the maximum information entropy to finally obtain the image corresponding to the best integration time.
- (5)
- The maximum information entropy adjustment method [27], called ME, uses a histogram to segment the image, and searches for the integration time corresponding to the maximum information entropy in each region.
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, M.; Li, S.; Li, L.; Jin, W.Q.; Chen, G. Infrared HDR image fusion based on response model of cooled IRFPA under variable integration time. Infrared Phys. Technol. 2018, 94, 191–199. [Google Scholar] [CrossRef]
- Li, S.; Jin, W.Q.; Li, L.; Liu, M.C.; Yang, J.G. Fusion Method based on Grayscale-Gradient Estimation for Infrared Images with Multiple Integration Times. Infrared Phys. Technol. 2019, 105, 103179. [Google Scholar] [CrossRef]
- Yao, L.B.; Chen, N.; Hu, D.M.; Wang, Y.; Mao, W.B.; Zhong, S.Y.; Zhang, J.Q. Digital infrared focal plane array detectors. Infrared Laser Eng. 2022, 51, 1–11. [Google Scholar]
- Kuhnert, K.D.; Nguyen, D.; Kuhnert, L. Multiple templates auto exposure control based on luminance histogram for onboard camera. In Proceedings of the 2011 IEEE International Conference on Computer Science and Automation Engineering, Shanghai, China, 10–12 June 2011; pp. 237–241. [Google Scholar]
- Vuong, Q.K.; Yun, S.H.; Kim, S. A new auto exposure system to detect high dynamic range conditions using CMOS technology. In Proceedings of the 2008 Third International Conference on Convergence and Hybrid Information Technology, Busan, Korea, 11–13 November 2008; pp. 577–580. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.S.; Jung, Y.Y.; Kim, B.S.; Ko, S.J. An advanced video camera system with robust AF, AE, and AWB control. IEEE Trans. Consum. Electron. 2001, 47, 694–699. [Google Scholar]
- Murakami, M.; Honda, N. An Exposure Control System of Video Cameras Based on Fuzzy Logic Using Color Information. J. Jpn. Soc. Fuzzy Theory Syst. 1996, 8, 1154–1159. [Google Scholar] [CrossRef] [Green Version]
- Haruki, T.; Kikuchi, K. Video camera system using fuzzy logic. IEEE Trans. Consum. Electron. 1992, 38, 624–634. [Google Scholar] [CrossRef]
- Shimizu, S.; Kondo, T. A new method for exposure control based on fuzzy logic for video cameras. IEEE Trans. Consum. Electron. 1992, 38, 617–623. [Google Scholar] [CrossRef]
- Tao, K.; Li, F.; Zhou, Y.; Liu, J.L. IRFPA imaging system dynamic range adaptive adjust technology. Infrared Laser Eng. 2008, 37, 5. [Google Scholar]
- Chu, G.S. Auto exposure system based on image processing. Optoelectro-Mech. Inf. 2010, 1, 20–22. [Google Scholar]
- Song, R.; Jiang, X.H.; Jia, Y. Low-Complexity Method for the Synthesis of Efficient and Highly Dynamic Digital Images. CN104301636A, 28 July 2017. [Google Scholar]
- Kao, W.C.; Hsu, C.C.; Kao, C.C.; Chen, S.H. Adaptive exposure control and real-time image fusion for surveillance systems. In Proceedings of the 2006 IEEE International Symposium on Circuits and Systems (ISCAS), Kos, Greece, 21–24 May 2006; pp. 935–938. [Google Scholar]
- Malik, M.H.; Asif, S.; Gilani, M. Wavelet Based Exposure Fusion. In Proceedings of the World Congress on Engineering, London, UK, 2–4 July 2008. [Google Scholar]
- Kong, J.; Wang, R.; Lu, Y.; Feng, X.; Zhang, J. A Novel Fusion Approach of Multi-exposure Image. In Proceedings of the EUROCON 2007-The International Conference on “Computer as a Tool”, Warsaw, Poland, 9–12 September 2007; pp. 163–169. [Google Scholar]
- Goshtasby, A.A. Fusion of multi-exposure images. Image Vis. Comput. 2005, 23, 611–618. [Google Scholar] [CrossRef]
- Kou, F.; Li, Z.; Wen, C.; Chen, W. Multi-scale exposure fusion via gradient domain guided image filtering. In Proceedings of the 2017 IEEE International Conference on Multimedia and Expo (ICME), Hong Kong, China, 10–14 July 2017; pp. 1105–1110. [Google Scholar]
- Shen, J.; Zhao, Y.; He, Y. Detail-preserving exposure fusion using subband architecture. Vis. Comput. 2012, 28, 463–473. [Google Scholar] [CrossRef]
- Yan, Q.S.; Zhu, Y.; Zhou, Y.L.; Sun, J.Q.; Zhang, L.; Zhang, Y.N. Enhancing Image Visuality by Multi-Exposure Fusion. Pattern Recognit. Lett. 2018, 127, 66–75. [Google Scholar] [CrossRef]
- Mertens, T.; Kautz, J.; Reeth, F.V. Exposure Fusion. In Proceedings of the 15th Pacific Conference on Computer Graphics and Applications, Maui, HI, USA, 29 October–2 November 2007. [Google Scholar]
- Zheng, M.; Qi, G.; Zhu, Z.; Li, Y.; Wei, H.; Liu, Y. Image Dehazing by An Artificial Image Fusion Method based on Adaptive Structure Decomposition. IEEE Sens. J. 2020, 20, 8062–8072. [Google Scholar] [CrossRef]
- Schulz, S.; Grimm, M.; Grigat, R.R. Using Brightness Histogram to perform Optimum Auto Exposure. WSEAS Trans. Syst. Control 2007, 2, 93–100. [Google Scholar]
- Guan, C.; Wang, Y.J. Real-time automatic dimming system for CCD cameras. Opt. Precis. Eng. 2008, 16, 358–366. [Google Scholar]
- Wang, W.L.; Li, Q.; Chang, J.Y.; Song, S.N.; Chen, Y.C. Automatic Integration Time Adjustment Method Based on Near Infrared Camera. CN201310473094.XA, 25 December 2013. [Google Scholar]
- Dong, F.; Liu, H.; Fu, Q. A High Dynamic Range Adaptive Adjustment Method for Infrared Thermal Imaging Camera. CN201611084241.4, 4 June 2018. [Google Scholar]
- Hong, W.Q.; Yao, L.B.; Ji, R.B.; Liu, C.M.; Su, J.B.; Chen, S.G.; Zhao, C.B. An Embedded Infrared Image Superframe Processing Method Based on Adaptive Integration Time. CN201410828456.7, 13 May 2015. [Google Scholar]
- Hou, X.; Luo, H.; Zhou, P. Multi-exposure control method based on maximum local information entropy. Infrared Laser Eng. 2017, 46, 0726001. [Google Scholar]
- Yang, Z.T.; Ruan, P.; Zhai, B. Auto-exposure Algorithm for Scenes with High Dynamic Range Based on Image Entropy. Acta Photonica Sin. 2013, 42, 742–746. [Google Scholar] [CrossRef]
- Liu, J.Z.; Bai, J.; Sun, Q.; Liu, C. Algorithm of the automatic exposure time adjustment for portable multi-band camera. Infrared Laser Eng. 2013, 42, 1498–1501. [Google Scholar]
- Kinoshita, Y.; Shiota, S.; Kiya, H.; Yoshida, T. Multi-Exposure Image Fusion Based on Exposure Compensation. In Proceedings of the 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018; pp. 1388–1392. [Google Scholar]
- Ke, P.; Jung, C.; Fang, Y. Perceptual multi-exposure image fusion with overall image quality index and local saturation. Multimed. Syst. 2015, 23, 239–250. [Google Scholar] [CrossRef]
- Tang, J. A color image segmentation algorithm based on region growing. In Proceedings of the 2010 2nd International Conference on Computer Engineering and Technology, Chengdu, China, 16–18 April 2010. [Google Scholar]
- Debevec, P.E.; Malik, J. Recovering high dynamic range radiance maps from photographs. In Proceedings of the ACM SIGGRAPH 2008 Classes, Los Angeles, CA, USA, 11–15 August 2008. [Google Scholar]
- Vonikakis, V.; Bouzos, O.; Andreadis, I. Multi-exposure image fusion based on illumination estimation. In Proceedings of the IEEE International Conference on Signal and Image Processing and Applications, Kuala Lumpur, Malaysia, 16–18 November 2011; pp. 135–142. [Google Scholar]
- Ma, K.; Wang, Z. Multi-exposure image fusion: A patch-wise approach. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 1717–1721. [Google Scholar]
- Han, Y.; Cai, Y.Z.; Cao, Y.; Xu, X.M. A new image fusion performance metric based on visual information fidelity. Inf. Fusion 2013, 14, 127–135. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Integration Time/μs | H | Sobel | MeanI | StdI | Mulrank | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Value | Hrank | Value | Srank | Value | Mrank | Value | Stdrank | Value | Mulrank | |
| 13 | 3.689 | ➇ | 1516 | ➇ | 479 | ➇ | 658 | ➇ | 32 | ➇ |
| 67 | 4.933 | ➆ | 9628 | ➆ | 696 | ➆ | 1105 | ➆ | 28 | ➆ |
| 133 | 5.798 | ➅ | 21,613 | ➅ | 930 | ➅ | 1413 | ➅ | 24 | ➅ |
| 333 | 6.959 | ➄ | 56,978 | ➄ | 1567 | ➄ | 1839 | ➄ | 20 | ➄ |
| 665 | 7.834 | ➃ | 111,145 | ➃ | 2540 | ➃ | 2019 | ➂ | 15 | ➃ |
| 1330 | 8.728 | ➂ | 233,363 | ➂ | 4431 | ➂ | 2140 | ➁ | 11 | ➂ |
| 1995 | 9.221 | ➁ | 354,572 | ➁ | 6274 | ➀ | 2262 | ➀ | 6 | ➀ |
| 3990 | 9.532 | ➀ | 831,793 | ➀ | 11,496 | ➁ | 1992 | ➃ | 8 | ➁ |
| Methods | Integration Time/μs | ||
|---|---|---|---|
| Scene 1 | Scene 2 | Scene 3 | |
| ES | 50, 500, 800, 1150 | 50, 500, 800, 1150 | 67, 665,1330, 1995 |
| EI | 200, 350, 1050, 1400 | 600, 650, 900, 1400 | 665,1995, 3990 |
| MGD | 50, 350 | 550, 1000 | 13, 665 |
| MW&EN | 1100 | 900 | 1995 |
| ME | 150, 1150 | 250, 1200 | 133, 1330 |
| Proposed | 50, 1050, 1150 | 400, 900, 1200 | 67, 1995, 3990 |
| Indicators | Comparison Chart | Scene | |||
|---|---|---|---|---|---|
| 1 | 2 | 3 | Mean Value | ||
| ρ | ES | 0.0713 | 0.0595 | 0.0499 | 0.0602 |
| EI | 0.0692 | 0.0590 | 0.0538 | 0.0607 | |
| MGD | 0.0550 | 0.0563 | 0.0434 | 0.0516 | |
| MW&EN | 0.1674 | 0.1516 | 0.1464 | 0.1551 | |
| ME | 0.1110 | 0.1402 | 0.1247 | 0.1253 | |
| Proposed | 0.0672 | 0.0537 | 0.0542 | 0.0584 | |
| VIFF | ES | 0.5602 | 0.5098 | 0.6171 | 0.5624 |
| EI | 0.5143 | 0.4919 | 0.4632 | 0.4898 | |
| MGD | 0.5625 | 0.6592 | 0.4766 | 0.5661 | |
| MW&EN | \ | \ | \ | \ | |
| ME | 0.5858 | 0.4105 | 0.6380 | 0.5448 | |
| Proposed | 0.5955 | 0.6213 | 0.6491 | 0.6220 | |
| NIQE | ES | 5.6093 | 5.2954 | 4.0974 | 5.0007 |
| EI | 5.9566 | 5.4424 | 3.7536 | 5.0509 | |
| MGD | 6.2177 | 6.6463 | 3.786 | 5.5500 | |
| MW&EN | 6.2698 | 6.9657 | 3.0805 | 5.4387 | |
| ME | 5.3496 | 4.8063 | 3.7259 | 4.6273 | |
| Proposed | 4.8099 | 4.7036 | 3.7427 | 4.4187 | |
| Entropy | ES | 9.3389 | 10.9759 | 10.9916 | 10.4355 |
| EI | 9.2585 | 10.9844 | 10.8082 | 10.3504 | |
| MGD | 8.1782 | 10.8117 | 9.5601 | 9.5167 | |
| MW&EN | 7.8554 | 7.7013 | 7.8682 | 7.8083 | |
| ME | 9.4477 | 10.7024 | 10.6744 | 10.2748 | |
| Proposed | 9.6904 | 11.3003 | 11.0219 | 10.6709 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, X.; Jin, W.; Yang, J.; Li, S.; Su, B.; Wang, M. Multi-Integration Time Adaptive Selection Method for Superframe High-Dynamic-Range Infrared Imaging Based on Grayscale Information. Sensors 2022, 22, 4258. https://doi.org/10.3390/s22114258
Tao X, Jin W, Yang J, Li S, Su B, Wang M. Multi-Integration Time Adaptive Selection Method for Superframe High-Dynamic-Range Infrared Imaging Based on Grayscale Information. Sensors. 2022; 22(11):4258. https://doi.org/10.3390/s22114258
Chicago/Turabian StyleTao, Xingyu, Weiqi Jin, Jianguo Yang, Shuo Li, Binghua Su, and Minghe Wang. 2022. "Multi-Integration Time Adaptive Selection Method for Superframe High-Dynamic-Range Infrared Imaging Based on Grayscale Information" Sensors 22, no. 11: 4258. https://doi.org/10.3390/s22114258
APA StyleTao, X., Jin, W., Yang, J., Li, S., Su, B., & Wang, M. (2022). Multi-Integration Time Adaptive Selection Method for Superframe High-Dynamic-Range Infrared Imaging Based on Grayscale Information. Sensors, 22(11), 4258. https://doi.org/10.3390/s22114258