
Estimation of Combustion Parameters from Engine Vibrations Based on Discrete Wavelet Transform and Gradient Boosting

 , , ,
, , ,  and
and
Abstract
:1. Introduction
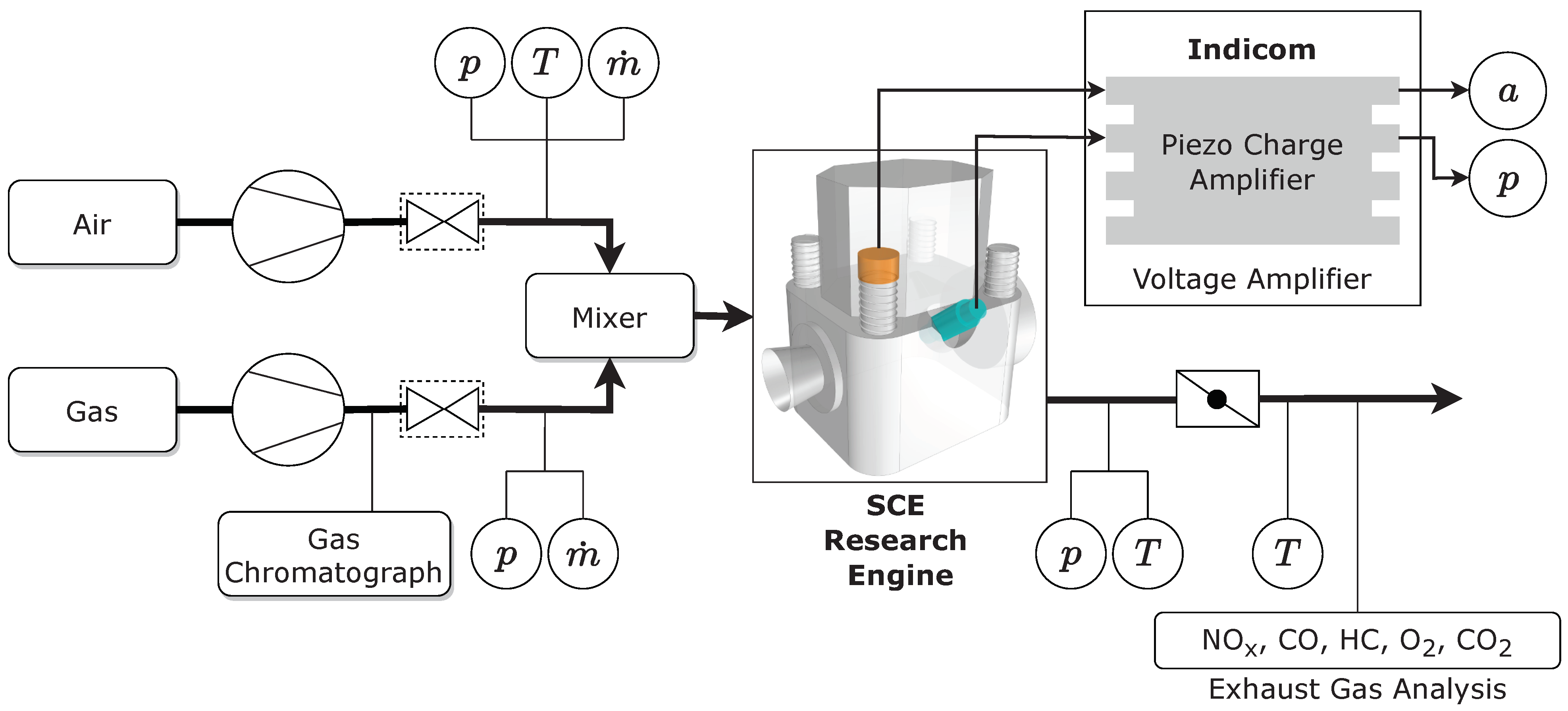
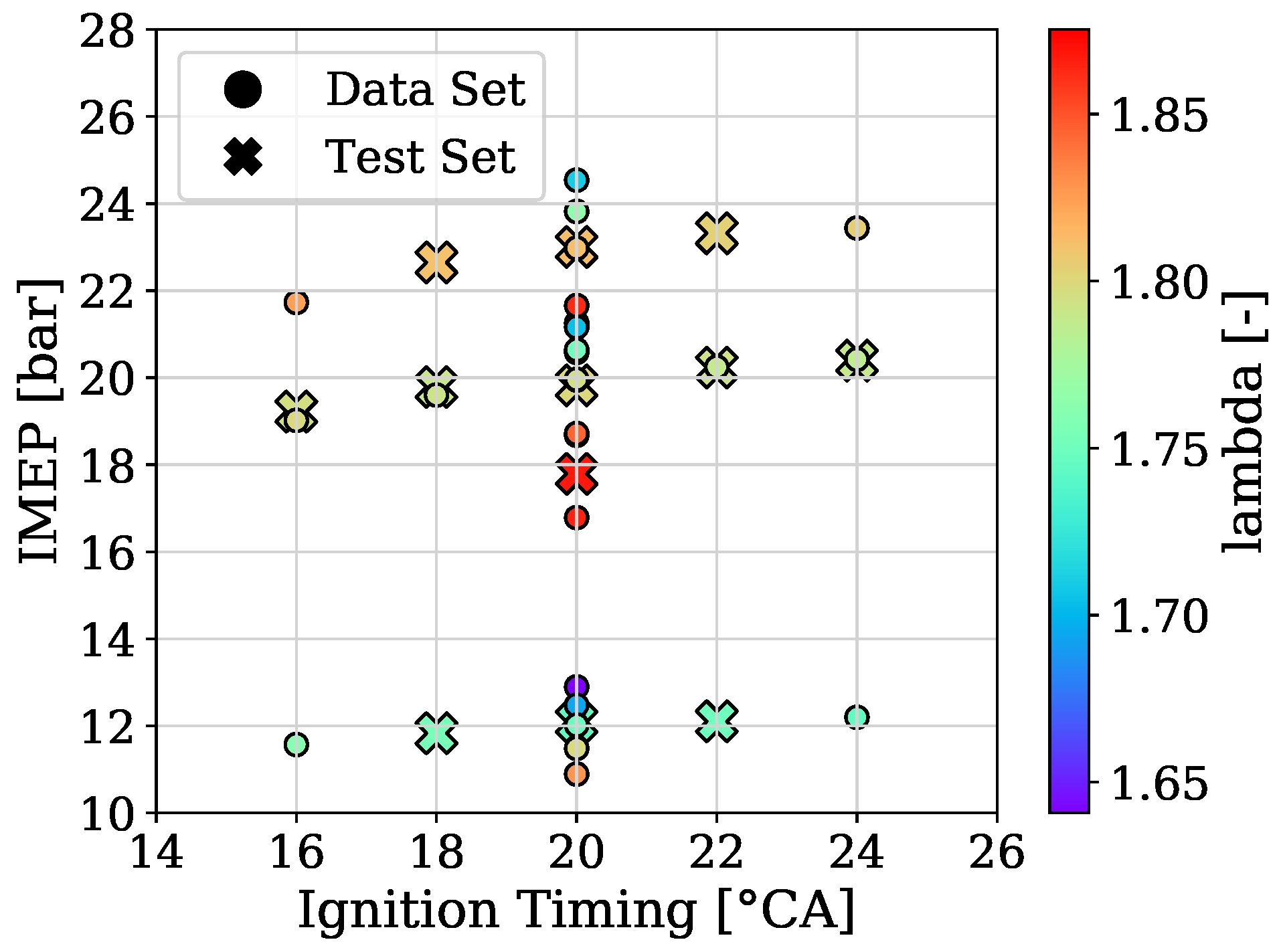
2. Experimental Work
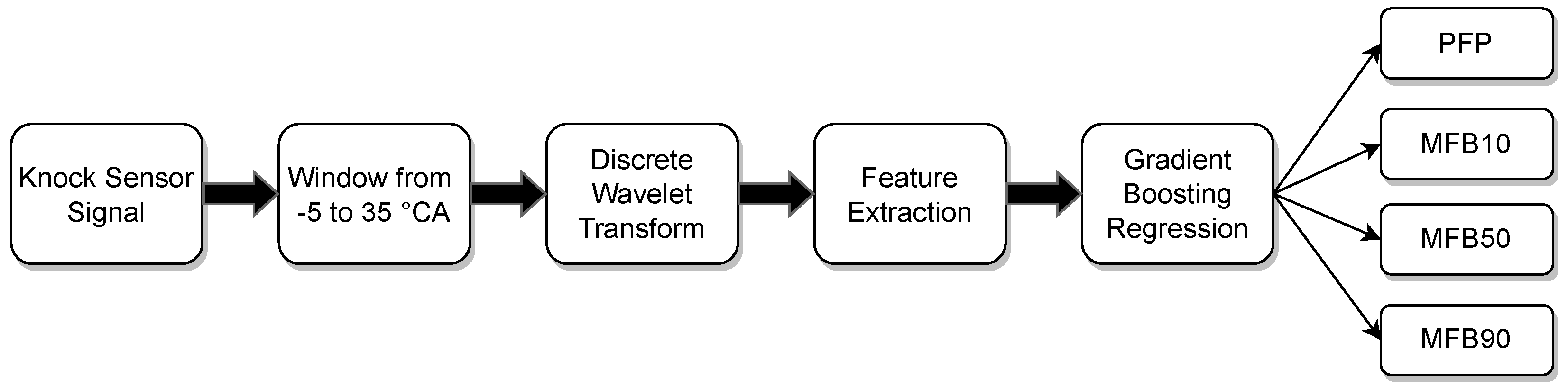
3. Methods
3.1. Combustion Parameters
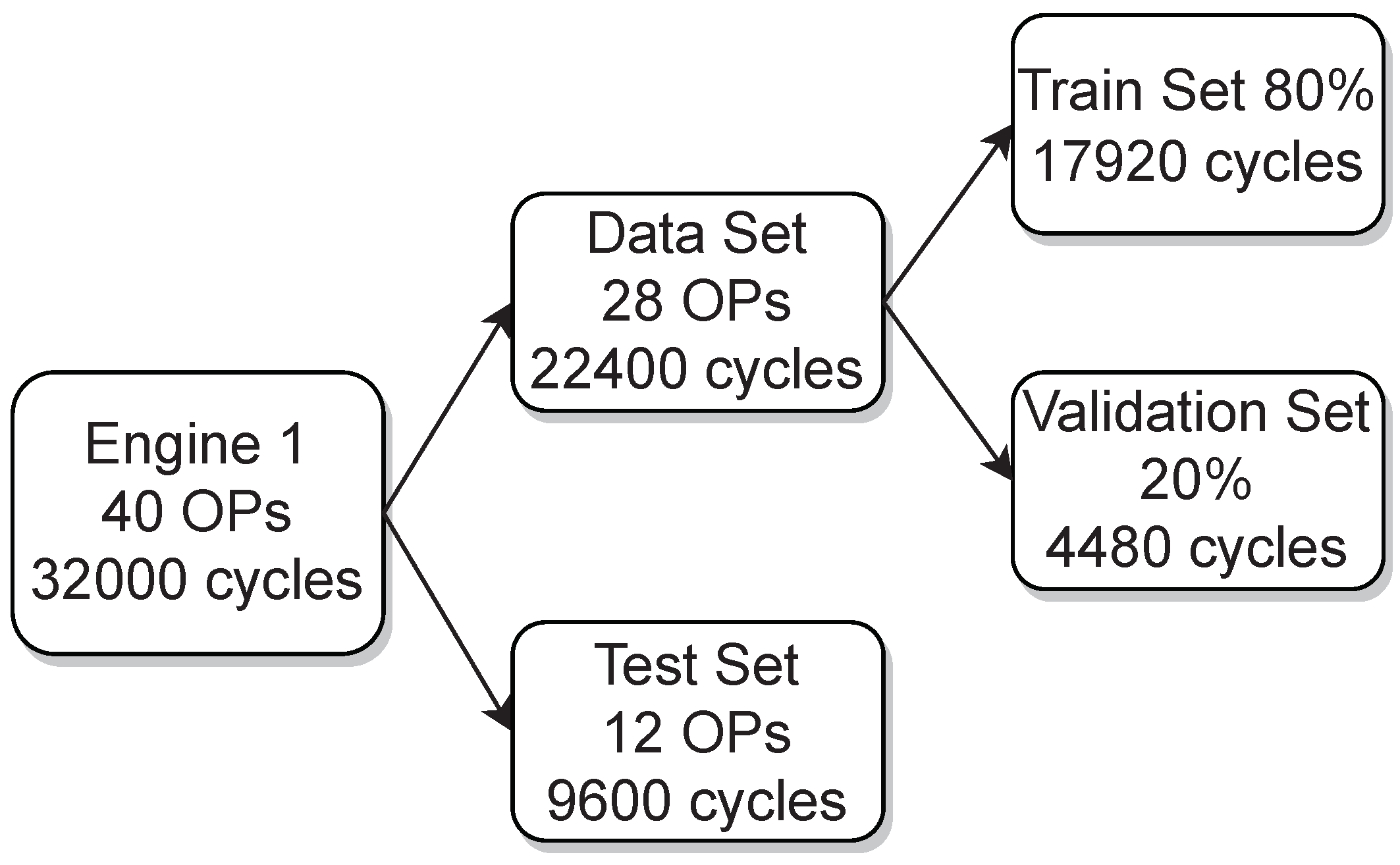
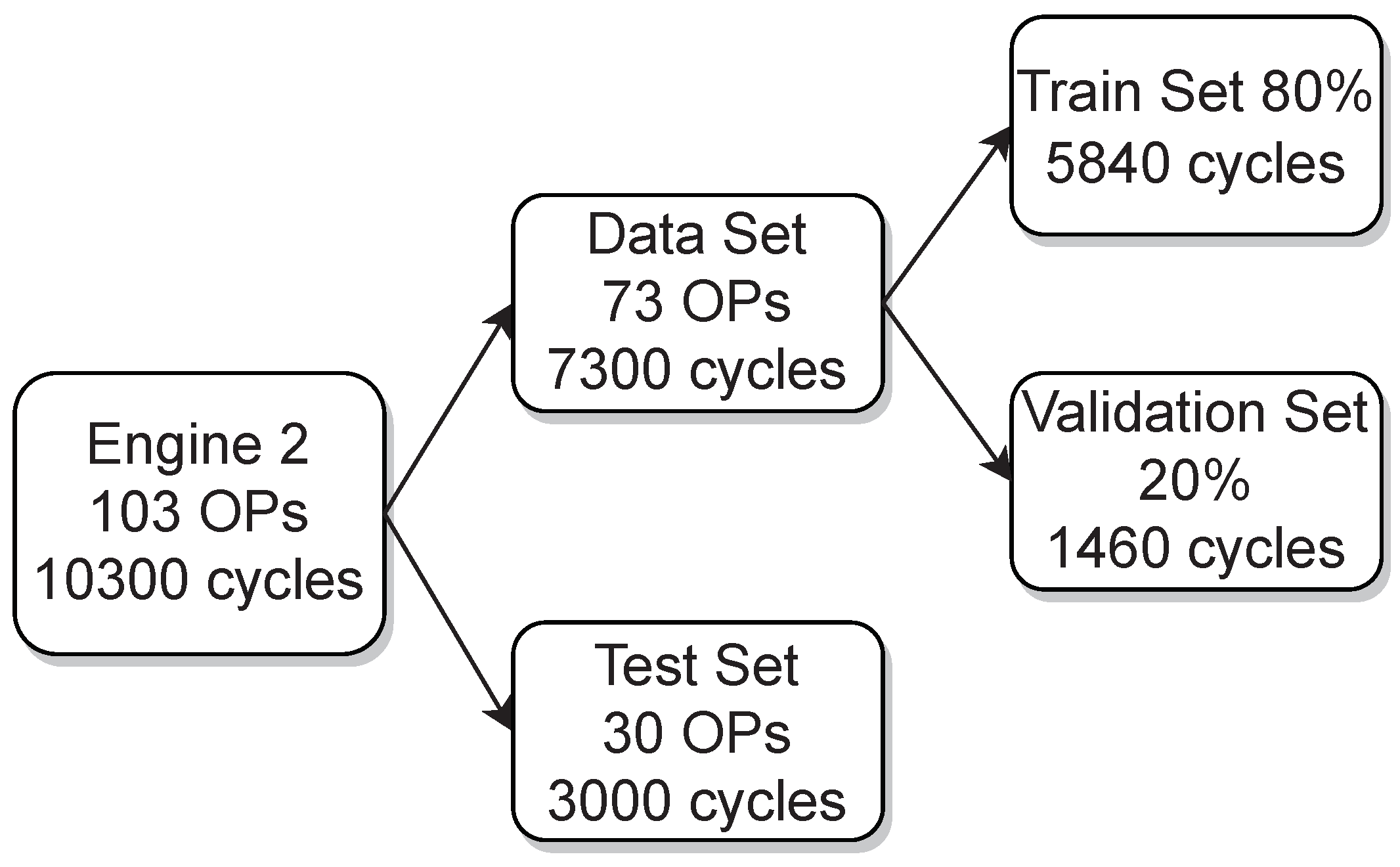
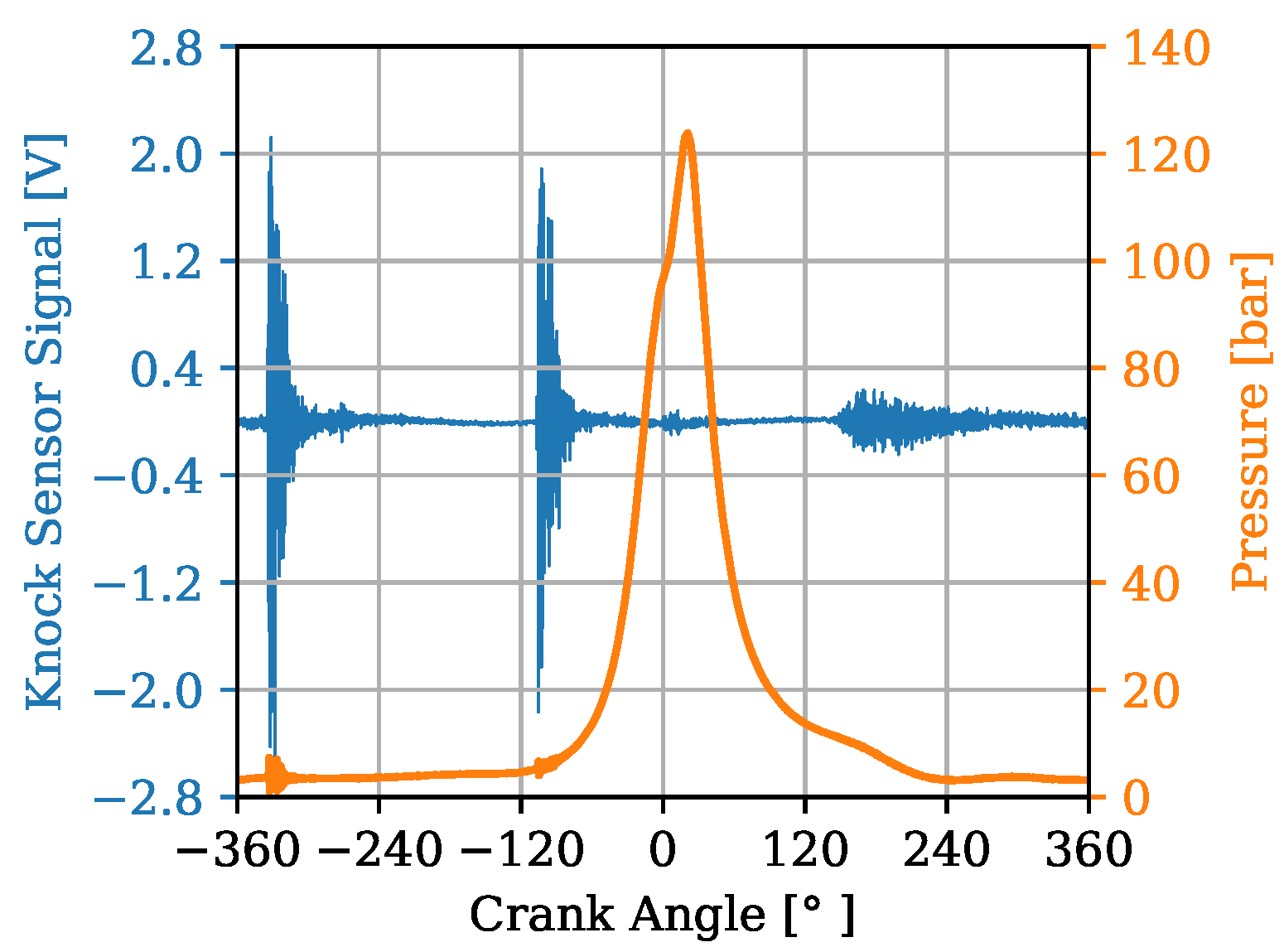
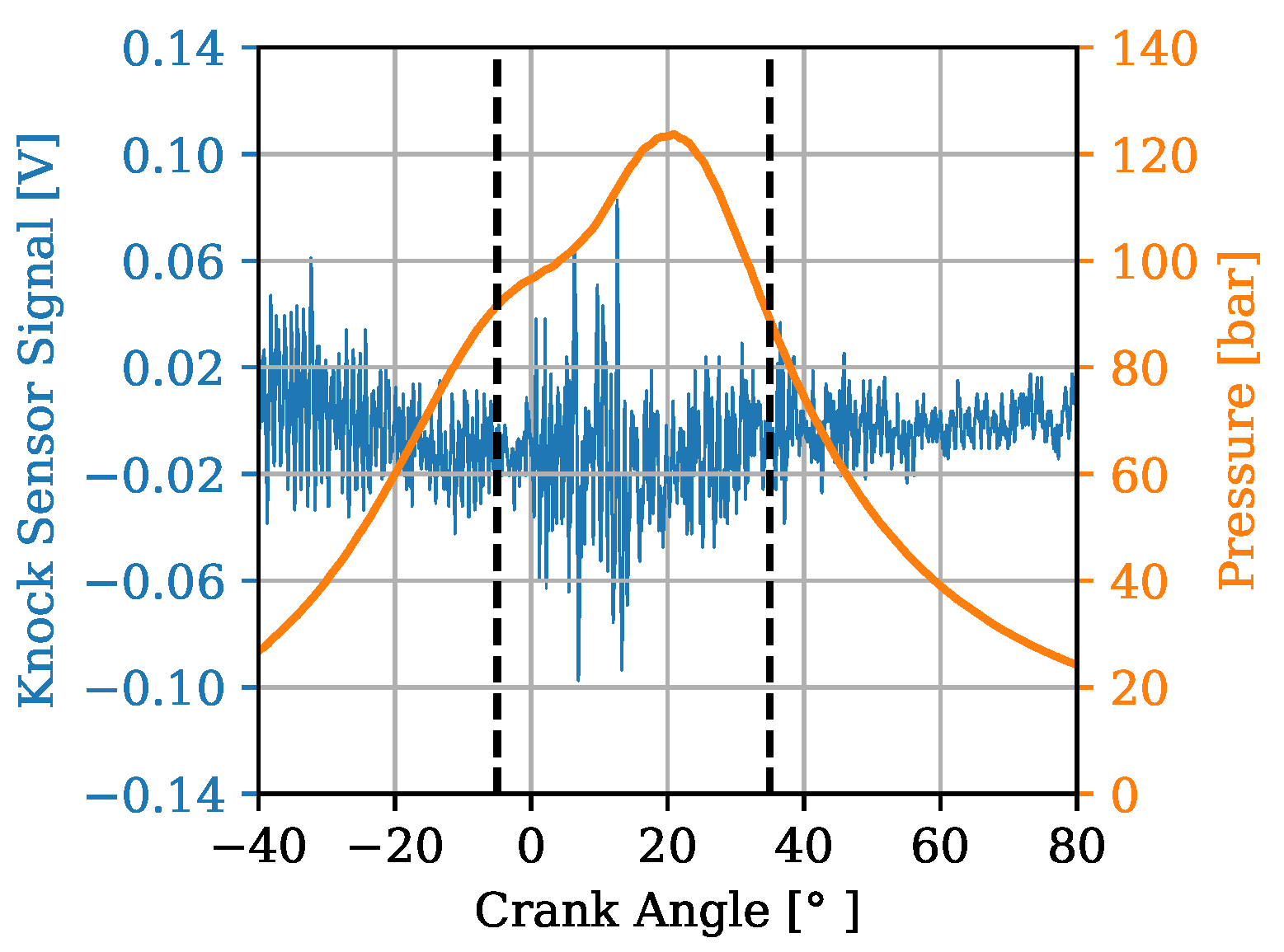
3.2. Sensor Signals Window
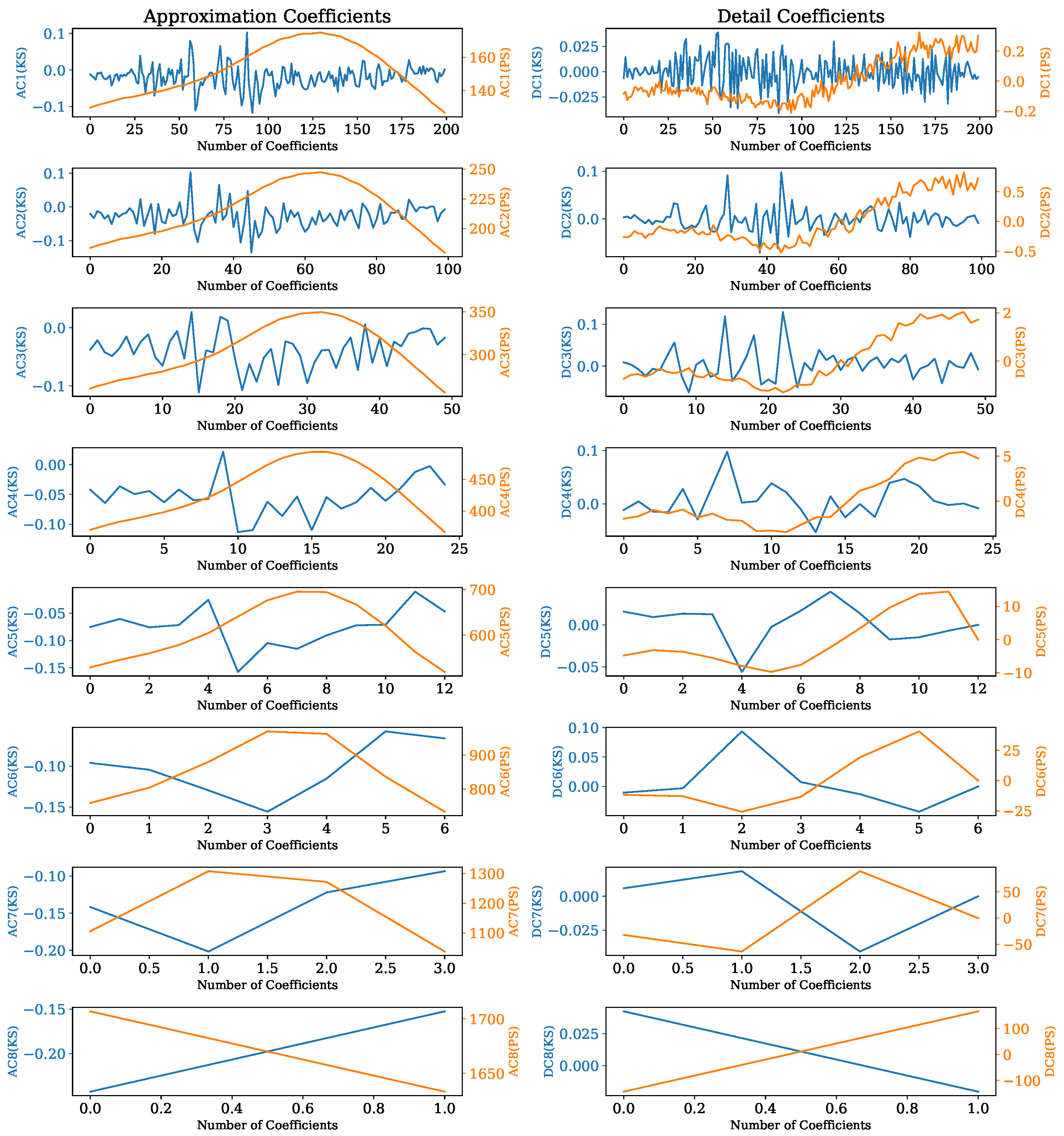
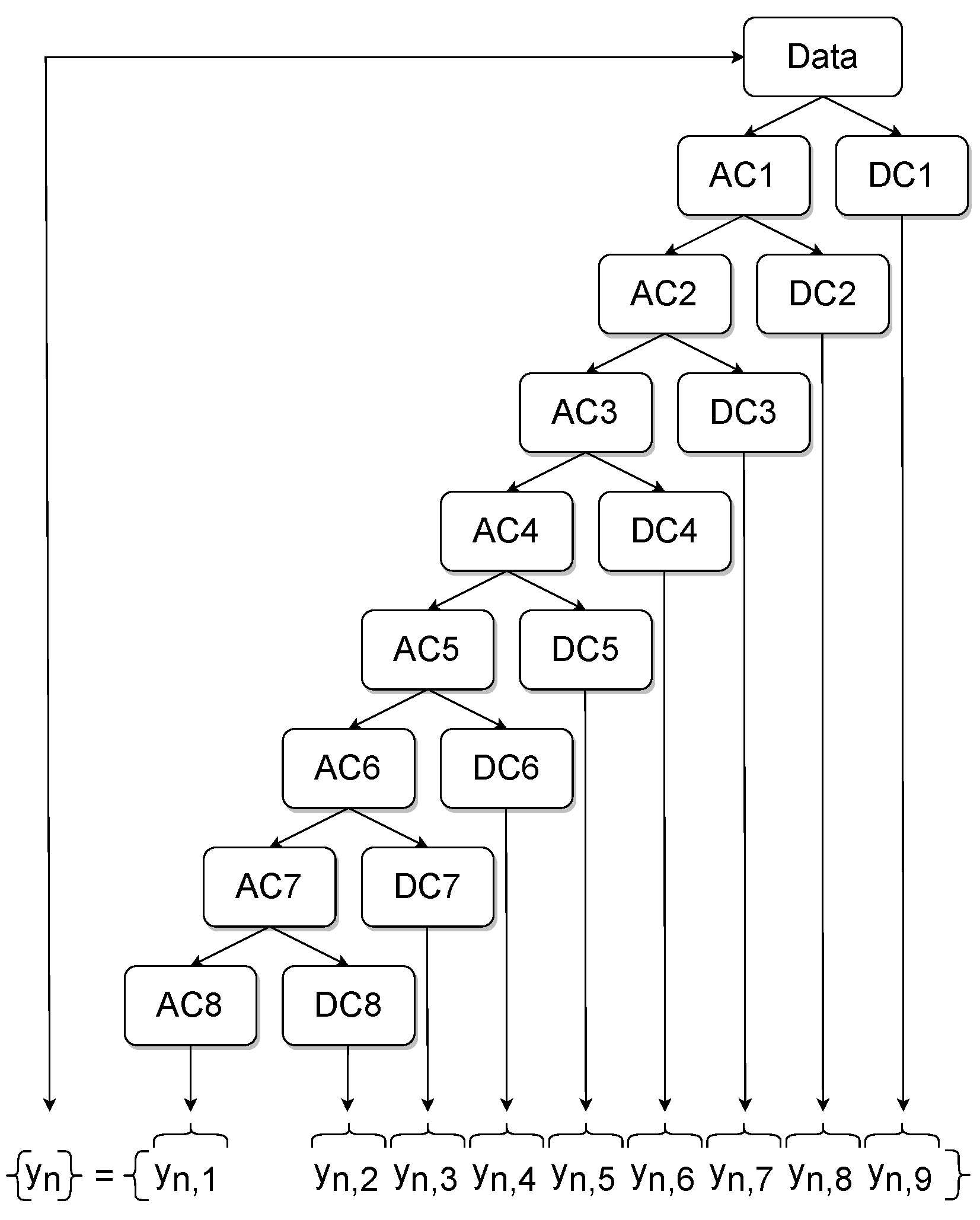
3.3. Discrete Wavelet Transform and Feature Extraction
3.4. Extreme Gradient Boosting (XGBoost) Regression and Feature Importance (FI)
4. Results
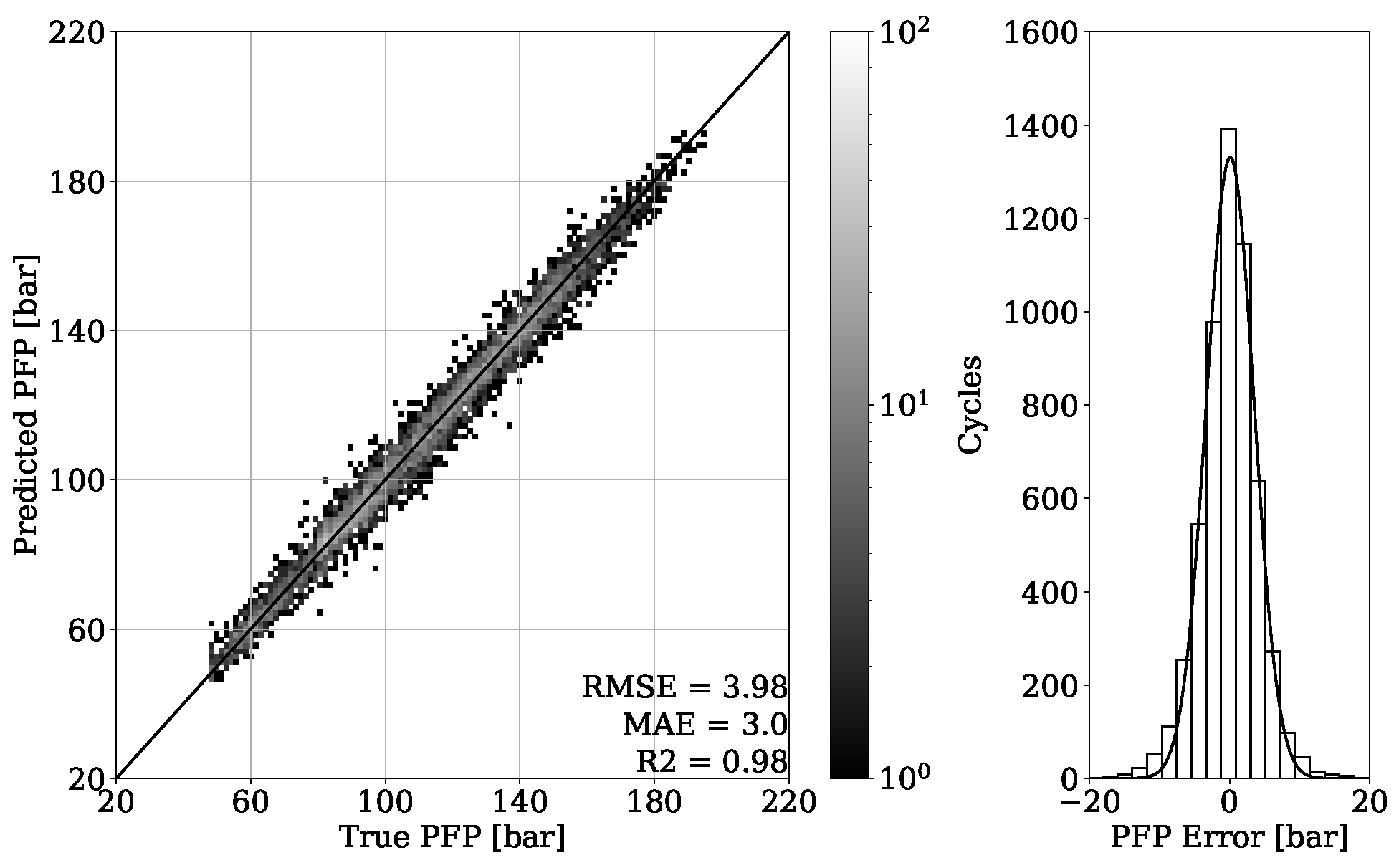
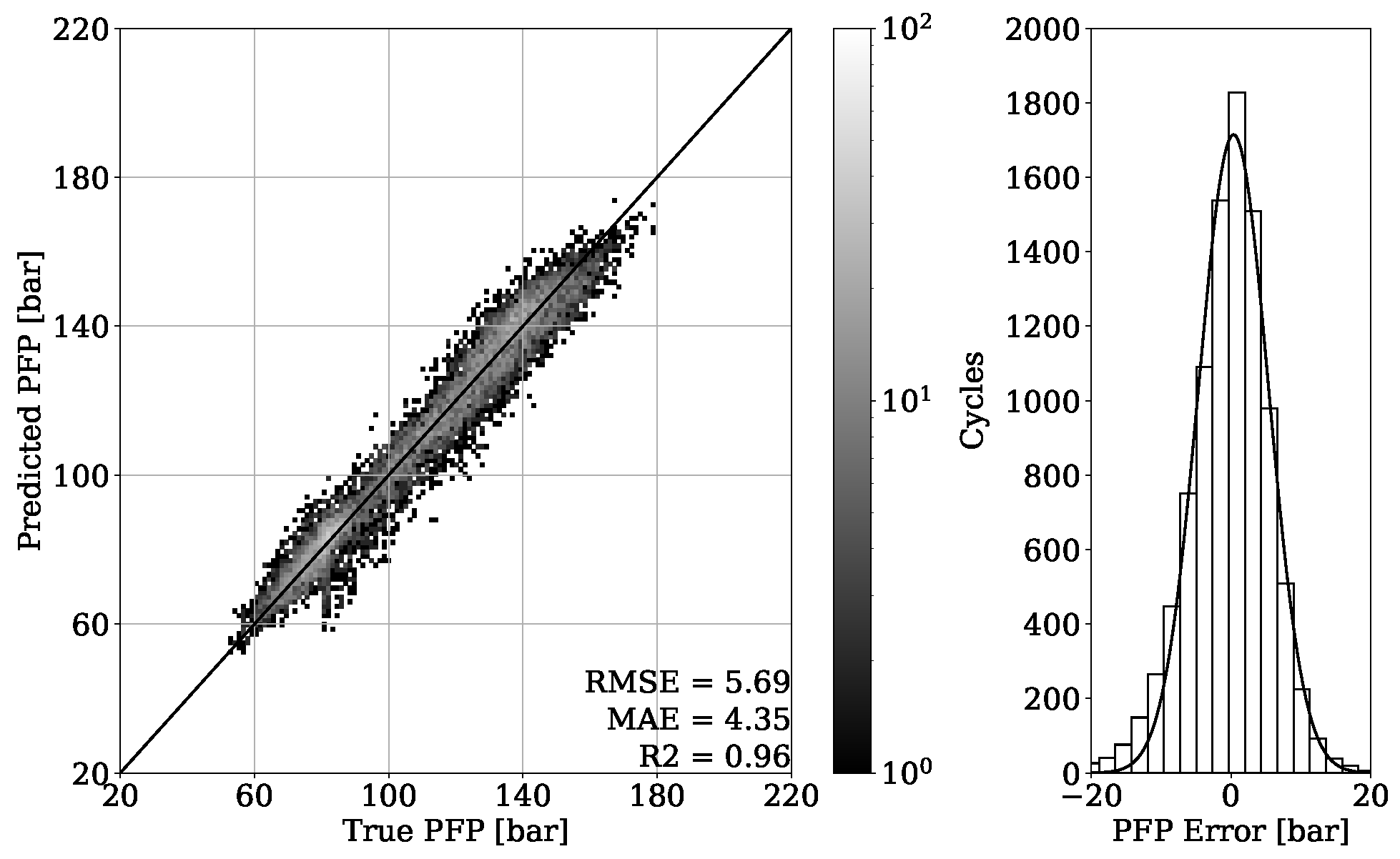
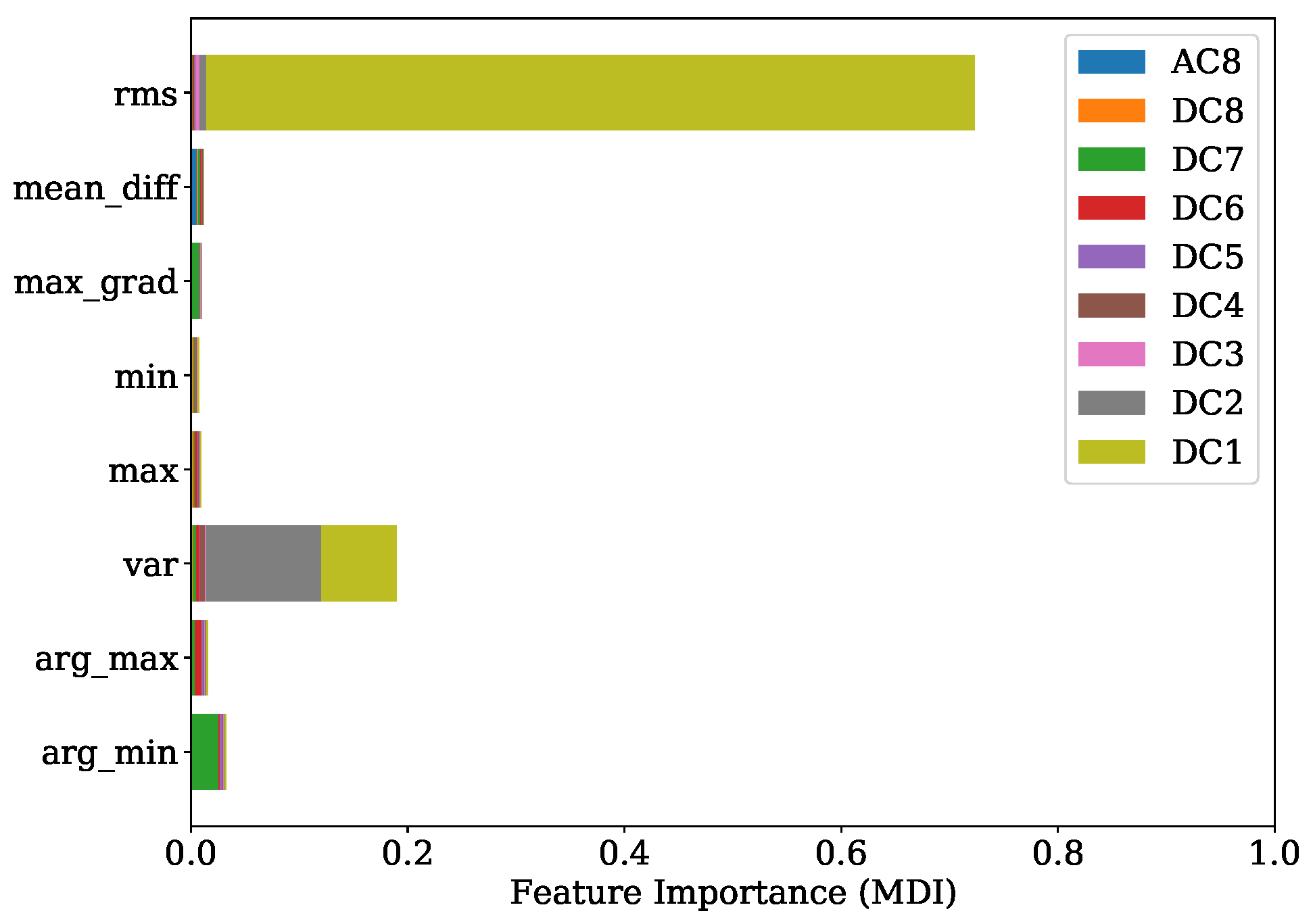
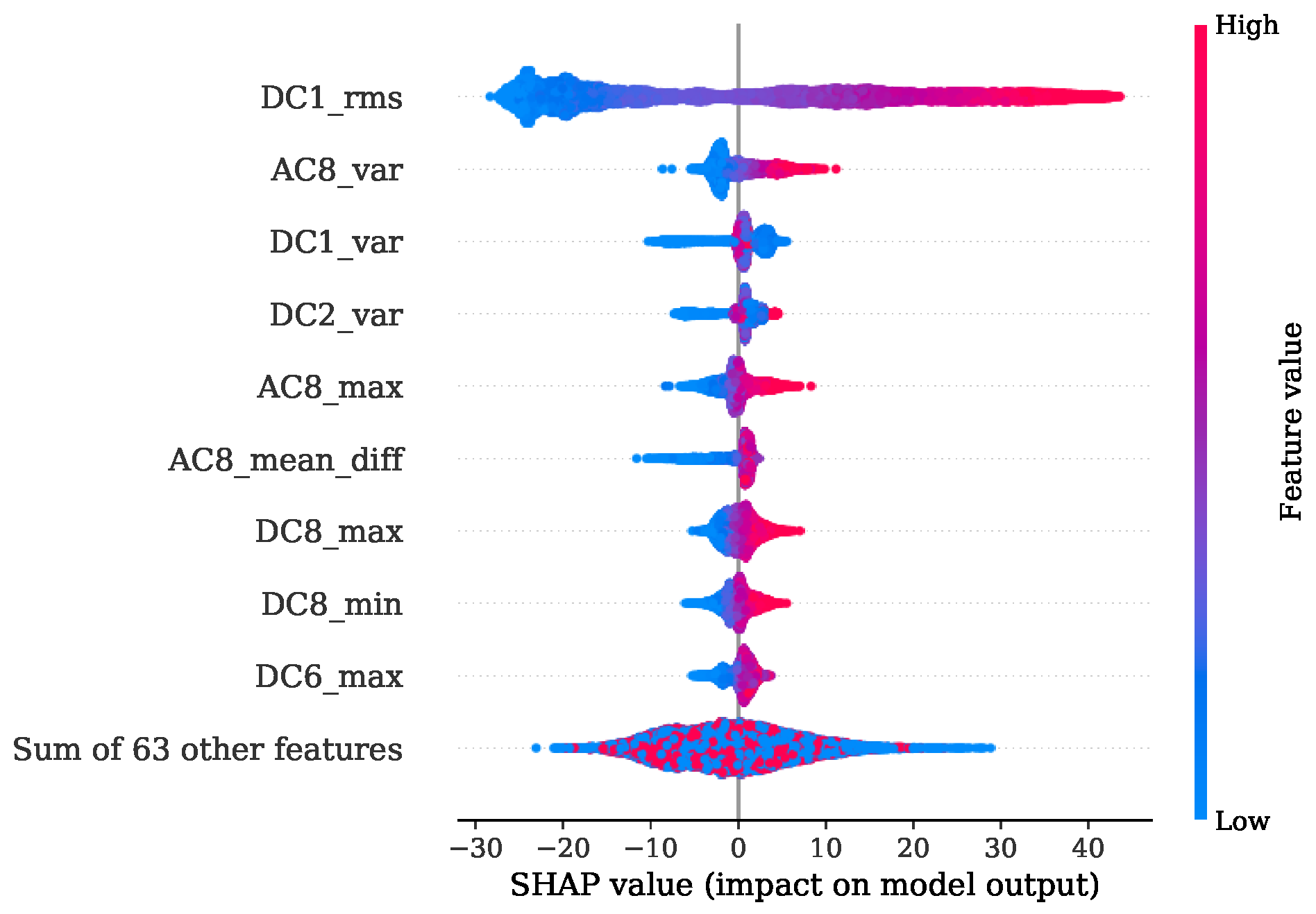
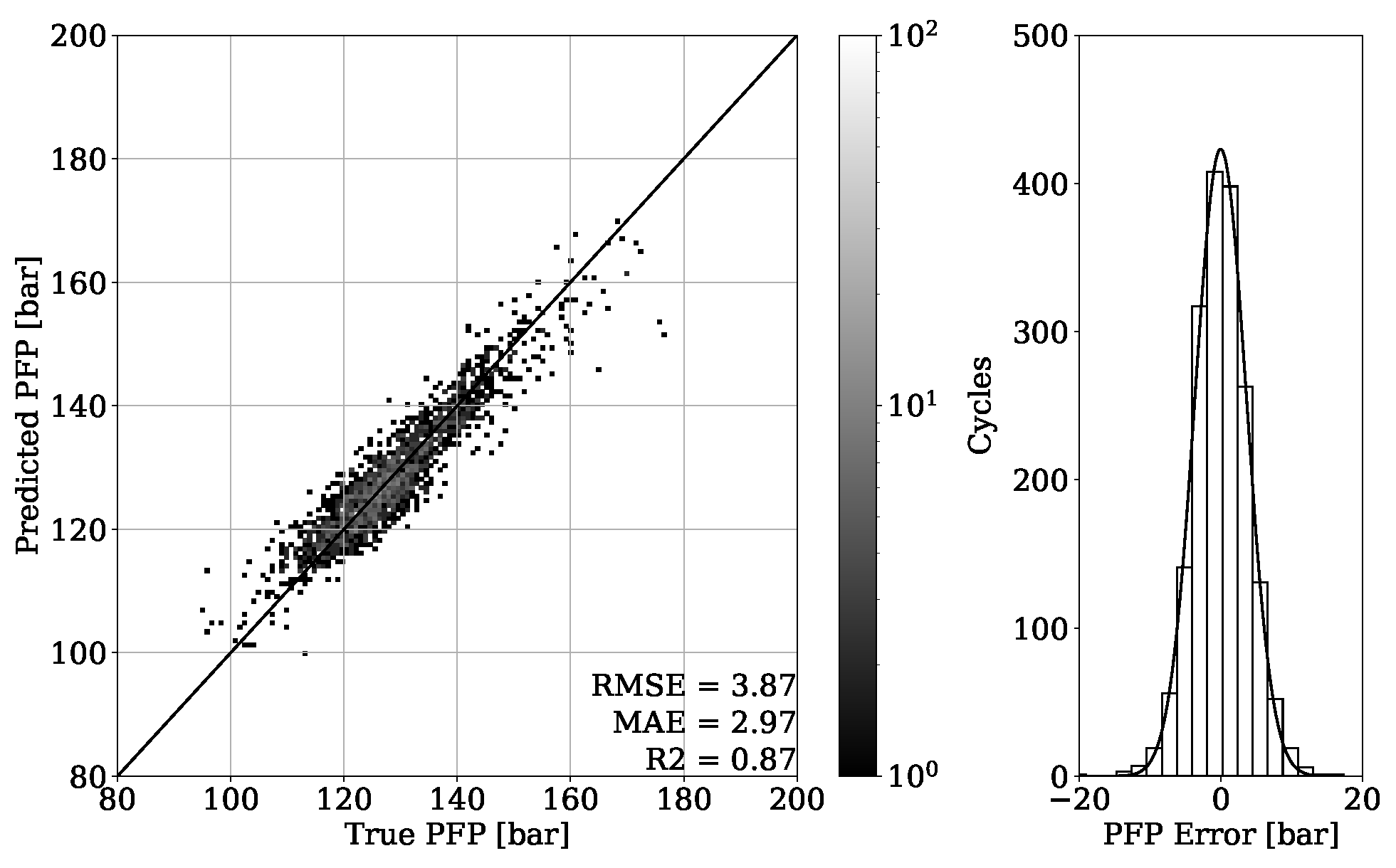
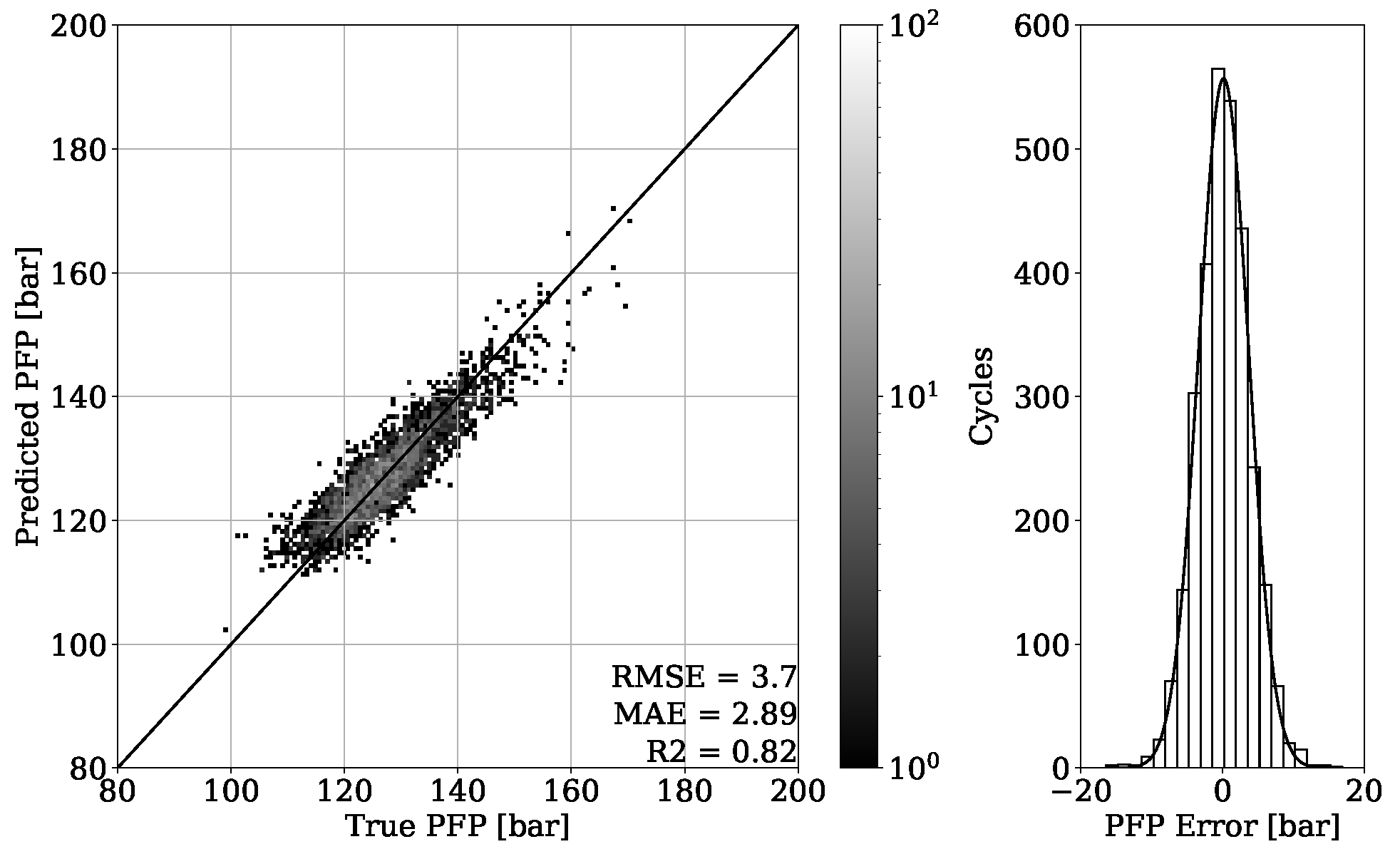
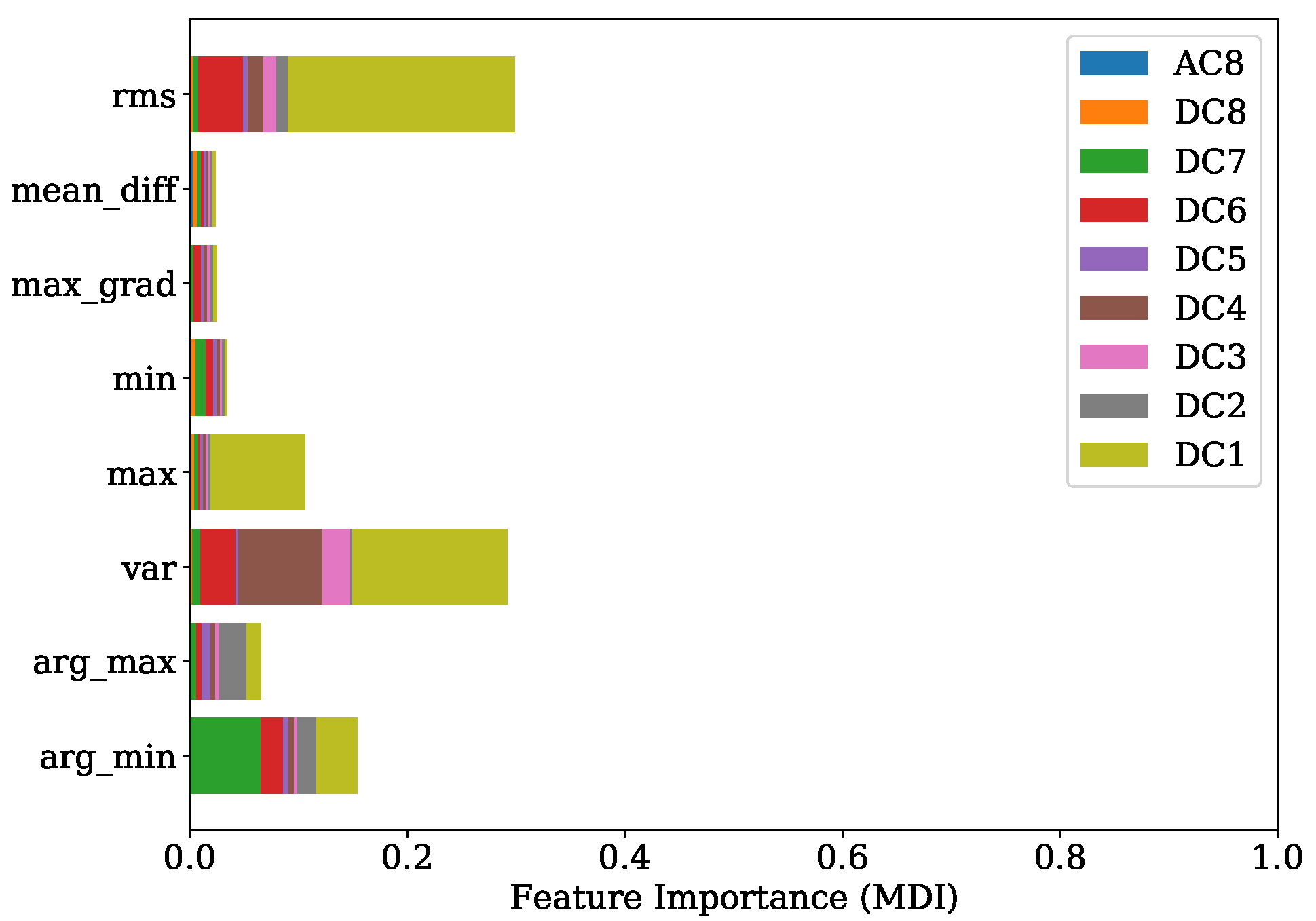
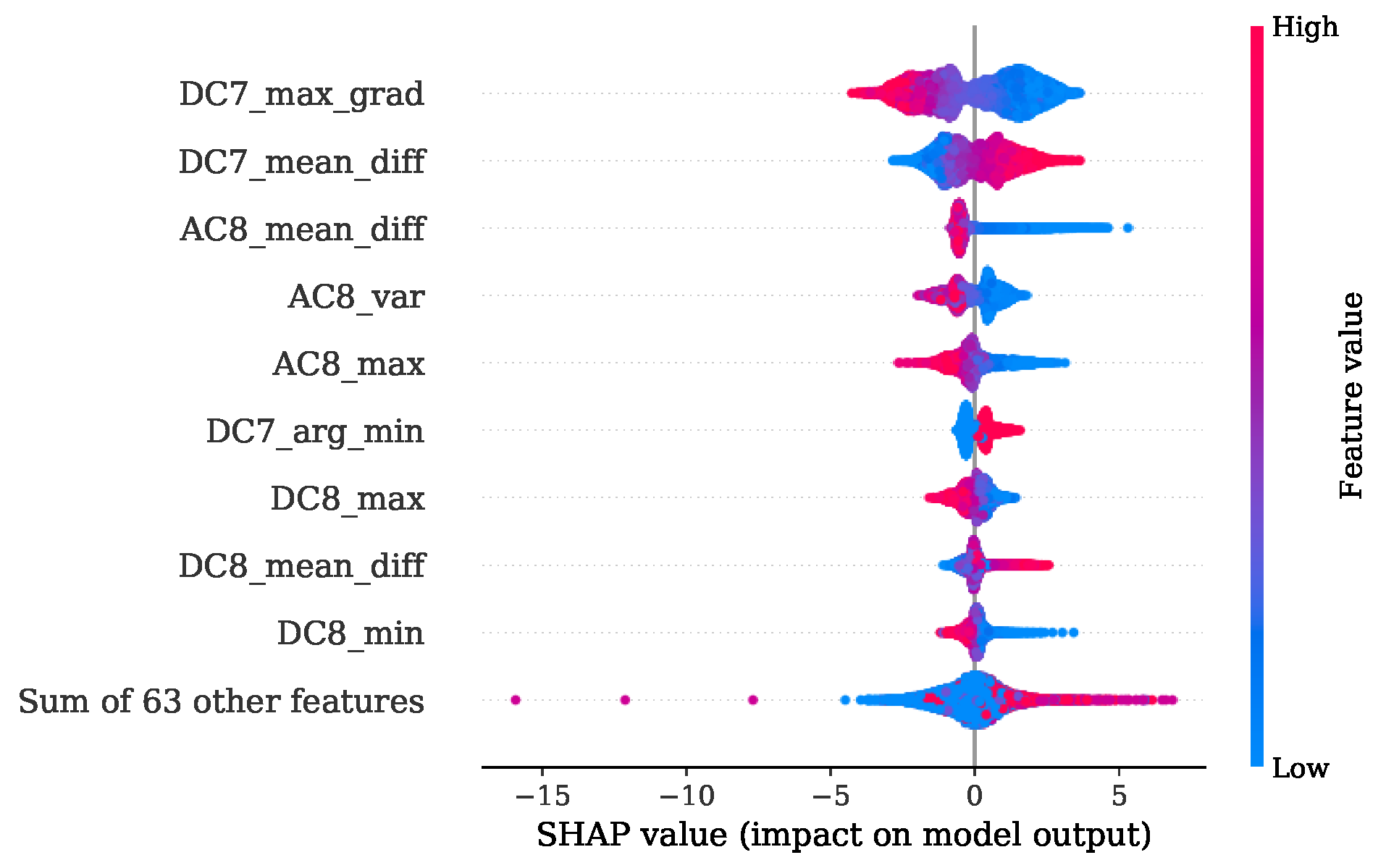
4.1. PFP Regression and FI
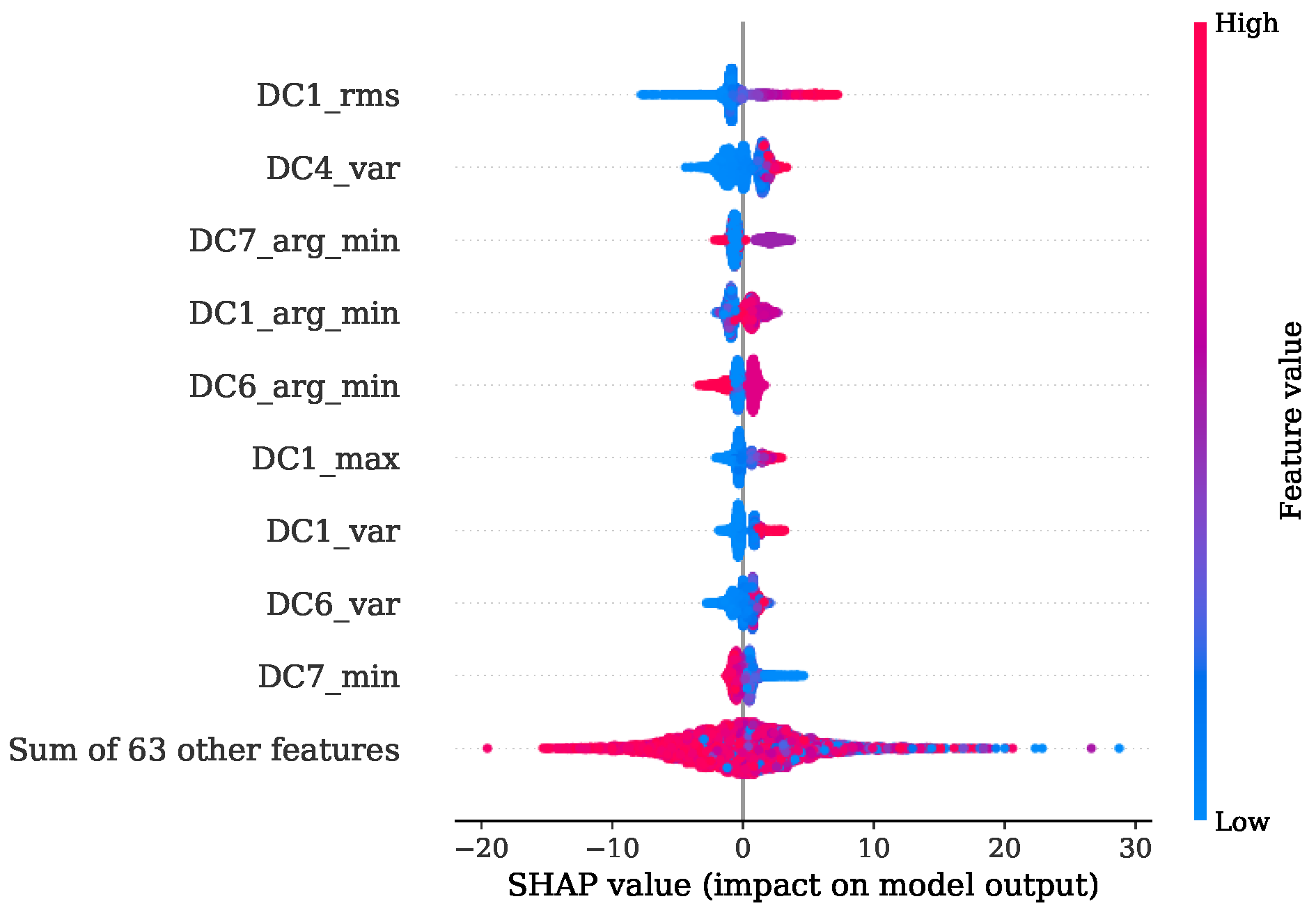
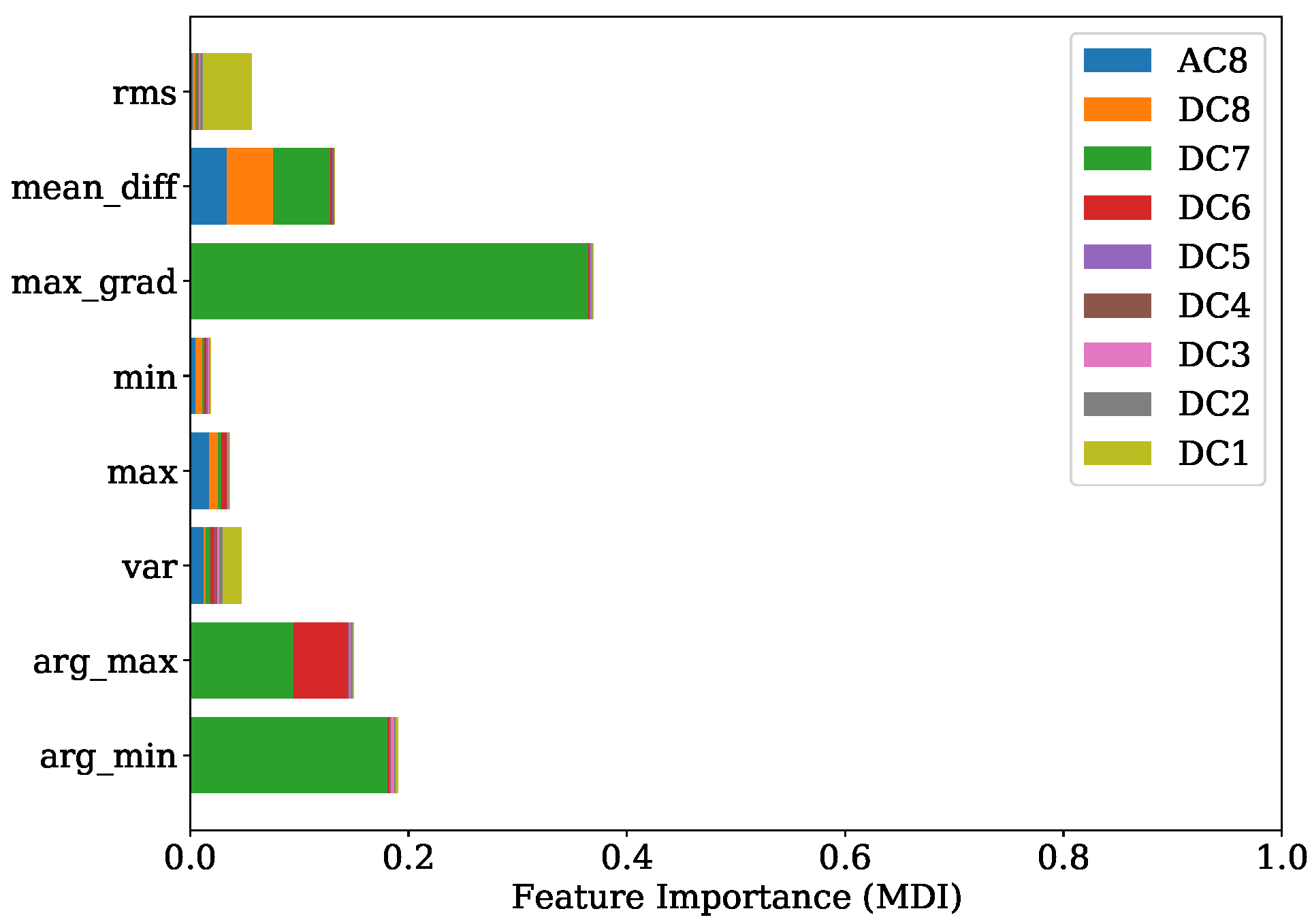
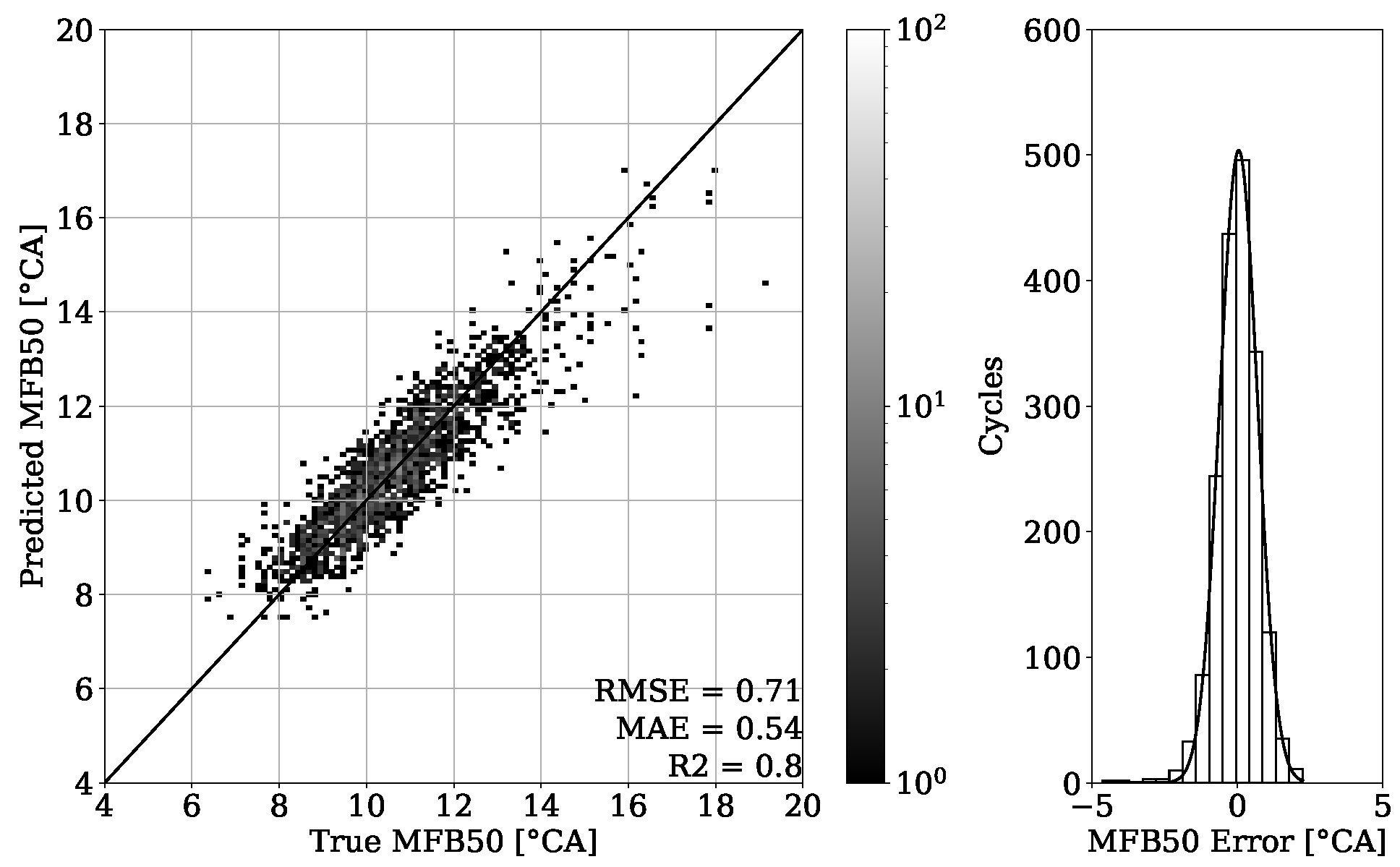
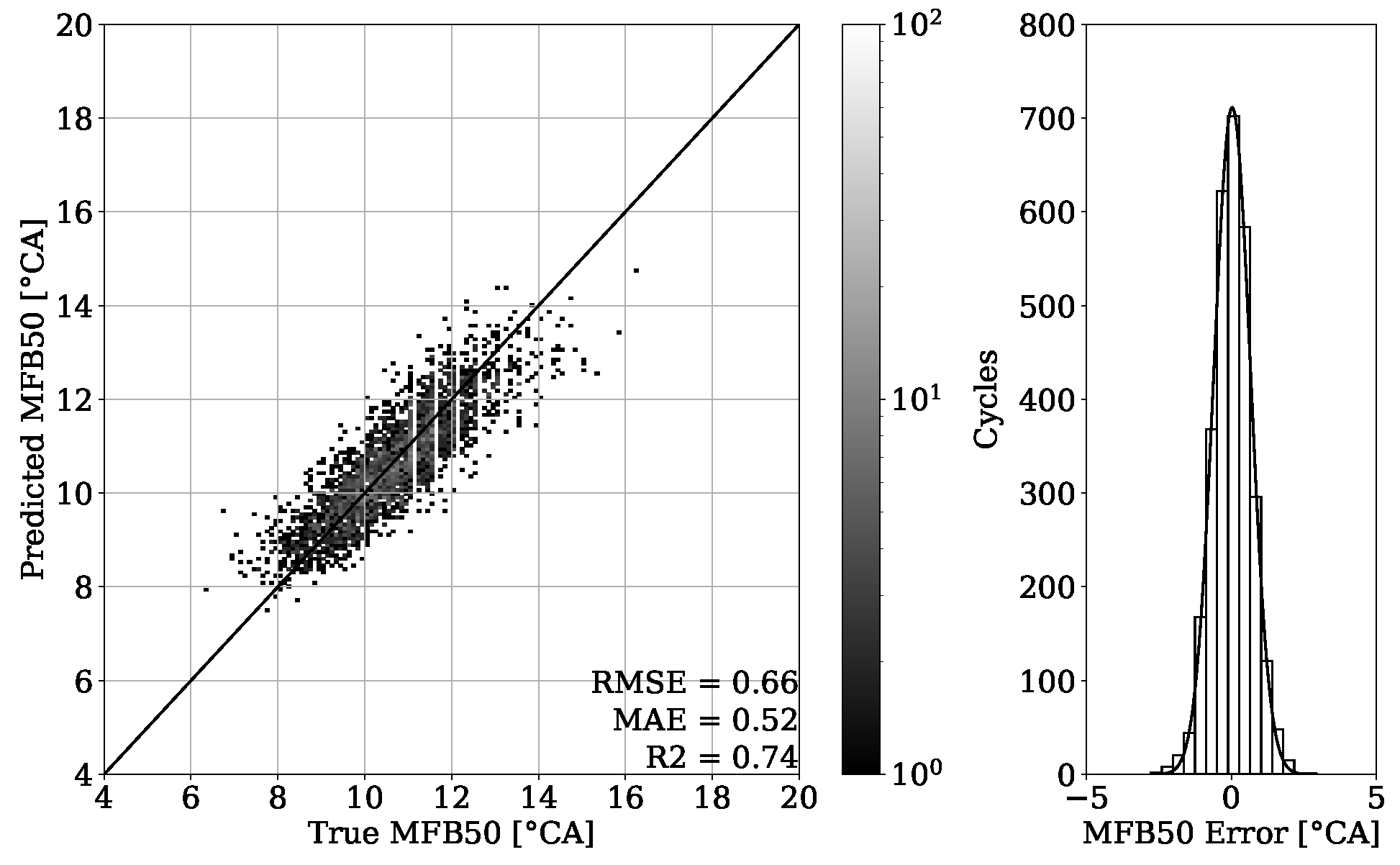
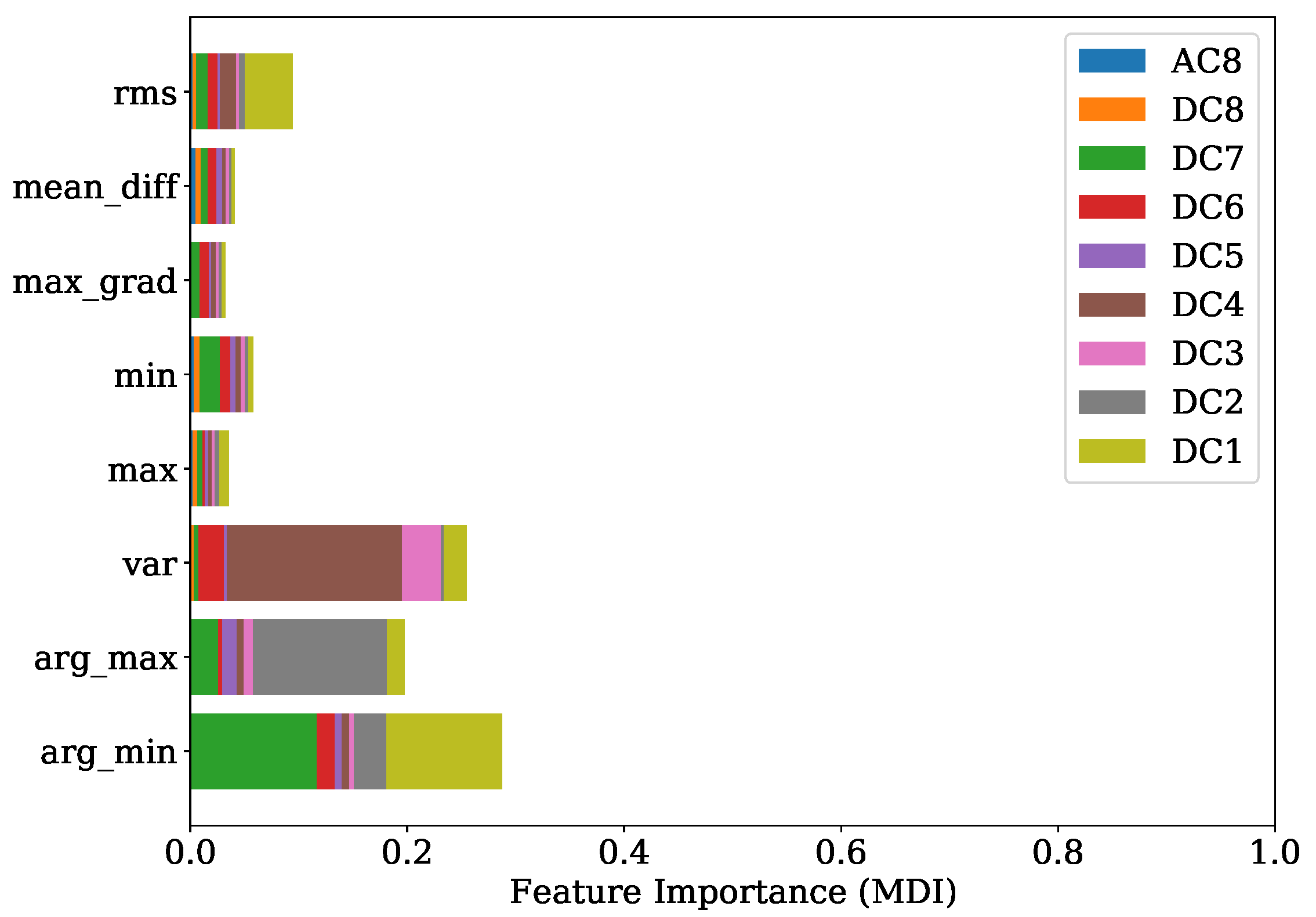
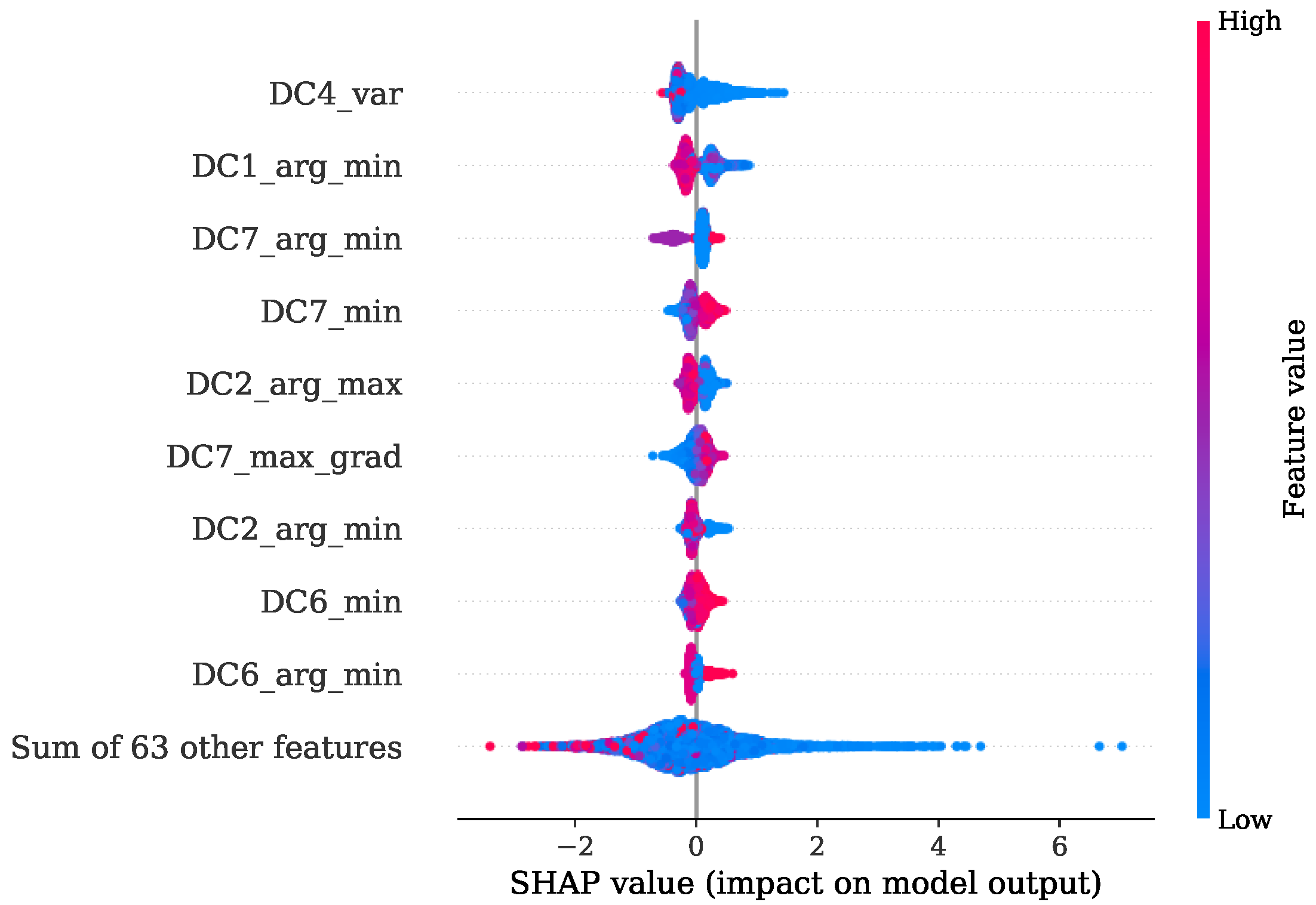
4.2. MFB50 Regression and FI
4.3. Summary

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DWT + XGBoost | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Engine 1 | Engine 2 | |||||||||||
| Validation | Test | Validation | Test | |||||||||
| Target | RMSE | MAE | R2 | RMSE | MAE | R2 | RMSE | MAE | R2 | RMSE | MAE | R2 |
| PFP | ||||||||||||
| MFB10 | ||||||||||||
| MFB50 | ||||||||||||
| MFB90 | ||||||||||||
| Time/Frequency + XGBoost | ||||||||||||
| Engine 1 | Engine 2 | |||||||||||
| Validation | Test | Validation | Test | |||||||||
| Target | RMSE | MAE | R2 | RMSE | MAE | R2 | RMSE | MAE | R2 | RMSE | MAE | R2 |
| PFP | ||||||||||||
| MFB10 | ||||||||||||
| MFB50 | ||||||||||||
| MFB90 | ||||||||||||
5. Discussion
5.1. KS Position
5.2. Towards a Theoretic Explanation of FI
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ANN | Artificial neural network |
| AC | Approximation coefficients |
| CA | Crank angle |
| CWT | Continuous wavelet transfrom |
| DC | Detailed coefficients |
| DWT | Discrete wavelet transform |
| ECU | Engine control unit |
| FI | Feature importance |
| IMEP | Indicated mean effective pressure |
| KS | Knock sensor |
| MAE | Mean absolute error |
| MDI | Mean decrease in impurity |
| MFB10 | Mass fraction burned 10% |
| MFB50 | Mass fraction burned 50% |
| MFB90 | Mass fraction burned 90% |
| OPs | Operating points |
| PFP | Peak firing pressure |
| PS | Pressure sensor |
| RMSE | Root mean square error |
| RMS | Root mean square |
| Coefficient of determination | |
| SCE | Single cylinder engine |
| SHAP | Shapley additive explanations |
| XGBoost | Extreme gradient boosting |
References
- Maurya, R.K. Reciprocating Engine Combustion Diagnostics; Springer Nature: Cham, Switzerland, 2019. [Google Scholar]
- Pla, B.; De La Morena, J.; Bares, P.; Jiménez, I. Adaptive in-cylinder pressure model for spark ignition engine control. Fuel 2021, 299, 120870. [Google Scholar] [CrossRef]
- Siano, D.; Bozza, F.; D’Agostino, D.; Panza, M.A. The Use of Vibrational Signals for On-Board Knock Diagnostics Supported by In-Cylinder Pressure Analyses; Technical Report; SAE International: Warrendale, PA, USA, 2014. [Google Scholar] [CrossRef]
- Chauvin, J.; Grondin, O.; Nguyen, E.; Guillemin, F. Real-time combustion parameters estimation for HCCI-diesel engine based on knock sensor measurement. IFAC Proc. Vol. 2008, 41, 8501–8507. [Google Scholar] [CrossRef] [Green Version]
- Aliramezani, M.; Koch, C.R.; Shahbakhti, M. Modeling, diagnostics, optimization, and control of internal combustion engines via modern machine learning techniques: A review and future directions. Prog. Energy Combust. Sci. 2022, 88, 100967. [Google Scholar] [CrossRef]
- Lounici, M.S.; Loubar, K.; Balistrou, M.; Tazerout, M. Investigation on heat transfer evaluation for a more efficient two-zone combustion model in the case of natural gas SI engines. Appl. Therm. Eng. 2011, 31, 319–328. [Google Scholar] [CrossRef] [Green Version]
- Posch, S.; Pirker, G.; Kefalas, A.; Wimmer, A. Development of a Virtual Sensor to Predict Cylinder Pressure Signal based on Knock Sensor Signal; Technical report; SAE Technical International: Warrendale, PA, USA, 2022. [Google Scholar]
- Wang, Q.; Sun, T.; Lyu, Z.; Gao, D. A Virtual In-Cylinder Pressure Sensor Based on EKF and Frequency-Amplitude-Modulation Fourier-Series Method. Sensors 2019, 19, 3122. [Google Scholar] [CrossRef] [Green Version]
- Businaro, A.; Cavina, N.; Corti, E.; Mancini, G.; Moro, D.; Ponti, F.; Ravaglioli, V. Accelerometer Based Methodology for Combustion Parameters Estimation. Energy Procedia 2015, 81, 950–959. [Google Scholar] [CrossRef] [Green Version]
- Han, R.; Bohn, C.; Bauer, G. Recursive engine in-cylinder pressure estimation using Kalman filter and structural vibration signal. IFAC-PapersOnLine 2018, 51, 700–705. [Google Scholar] [CrossRef]
- Siano, D.; Valentino, G.; Bozza, F.; Iacobacci, A.; Marchitto, L. A Non-Linear Regression Technique to Estimate from Vibrational Engine Data the Instantaneous In-Cylinder Pressure Peak and Related Angular Position; Technical Report; SAE International: Warrendale, PA, USA, 2016. [Google Scholar] [CrossRef]
- Norouzi, A.; Heidarifar, H.; Shahbakhti, M.; Koch, C.R.; Borhan, H. Model Predictive Control of Internal Combustion Engines: A Review and Future Directions. Energies 2021, 14, 6251. [Google Scholar] [CrossRef]
- Taglialatela, F.; Lavorgna, M.; Mancaruso, E.; Vaglieco, B. Determination of combustion parameters using engine crankshaft speed. Mech. Syst. Signal Process. 2013, 38, 628–633. [Google Scholar] [CrossRef]
- Johnsson, R. Cylinder pressure reconstruction based on complex radial basis function networks from vibration and speed signals. Mech. Syst. Signal Process. 2006, 20, 1923–1940. [Google Scholar] [CrossRef]
- Bennett, C.; Dunne, J.; Trimby, S.; Richardson, D. Engine cylinder pressure reconstruction using crank kinematics and recurrently-trained neural networks. Mech. Syst. Signal Process. 2017, 85, 126–145. [Google Scholar] [CrossRef]
- Jia, L.; Naber, J.D.; Blough, J.R. Review of sensing methodologies for estimation of combustion metrics. J. Combust. 2016, 2016, 8593523. [Google Scholar] [CrossRef] [Green Version]
- Siano, D.; D’Agostino, D. Knock Detection in SI Engines by Using the Discrete Wavelet Transform of the Engine Block Vibrational Signals. Energy Procedia 2015, 81, 673–688. [Google Scholar] [CrossRef] [Green Version]
- Delvecchio, S.; Bonfiglio, P.; Pompoli, F. Vibro-acoustic condition monitoring of Internal Combustion Engines: A critical review of existing techniques. Mech. Syst. Signal Process. 2018, 99, 661–683. [Google Scholar] [CrossRef]
- Jang, Y.I.; Sim, J.Y.; Yang, J.R.; Kwon, N.K. The optimal selection of mother wavelet function and decomposition level for denoising of dcg signal. Sensors 2021, 21, 1851. [Google Scholar] [CrossRef] [PubMed]
- Alqahtani, M.; Gumaei, A.; Mathkour, H.; Maher Ben Ismail, M. A genetic-based extreme gradient boosting model for detecting intrusions in wireless sensor networks. Sensors 2019, 19, 4383. [Google Scholar] [CrossRef] [Green Version]
- Chakraborty, D.; Elzarka, H. Early detection of faults in HVAC systems using an XGBoost model with a dynamic threshold. Energy Build. 2019, 185, 326–344. [Google Scholar] [CrossRef]
- Flores, V.; Keith, B. Gradient boosted trees predictive models for surface roughness in high-speed milling in the steel and aluminum metalworking industry. Complexity 2019, 2019, 1536716. [Google Scholar] [CrossRef] [Green Version]
- Leon-Medina, J.X.; Anaya, M.; Parés, N.; Tibaduiza, D.A.; Pozo, F. Structural damage classification in a Jacket-type wind-turbine foundation using principal component analysis and extreme gradient boosting. Sensors 2021, 21, 2748. [Google Scholar] [CrossRef]
- Rao, H.; Shi, X.; Rodrigue, A.K.; Feng, J.; Xia, Y.; Elhoseny, M.; Yuan, X.; Gu, L. Feature selection based on artificial bee colony and gradient boosting decision tree. Appl. Soft Comput. 2019, 74, 634–642. [Google Scholar] [CrossRef]
- Sun, R.; Wang, G.; Zhang, W.; Hsu, L.T.; Ochieng, W.Y. A gradient boosting decision tree based GPS signal reception classification algorithm. Appl. Soft Comput. 2020, 86, 105942. [Google Scholar] [CrossRef]
- Xuan, P.; Sun, C.; Zhang, T.; Ye, Y.; Shen, T.; Dong, Y. Gradient boosting decision tree-based method for predicting interactions between target genes and drugs. Front. Genet. 2019, 10, 459. [Google Scholar] [CrossRef] [PubMed]
- Nishat Toma, R.; Kim, J.M. Bearing fault classification of induction motors using discrete wavelet transform and ensemble machine learning algorithms. Appl. Sci. 2020, 10, 5251. [Google Scholar] [CrossRef]
- Zelenka, J.; Kammel, G.; Wimmer, A.; Bärow, E.; Huschenbett, M. Analysis of a prechamber ignited HPDI gas combustion concept. In SAE Technical Papers; SAE International: Warrendale, PA, USA, 2020. [Google Scholar] [CrossRef]
- Kirsten, M. Detektion Klopfender Verbrennung in Diesel/Erdgas-Dual-Fuel-Motoren. Ph.D. Thesis, Graz University of Technology, Graz, Austria, 2016. [Google Scholar]
- Pischinger, R.; Klell, M.; Sams, T. Thermodynamik der Verbrennungskraftmaschine; Springer: Vienna, Austria, 2009. [Google Scholar]
- Pipitone, E. A comparison between combustion phase indicators for optimal spark timing. J. Eng. Gas Turbines Power 2008, 130, 052808. [Google Scholar] [CrossRef]
- Eriksson, L.; Thomasson, A. Cylinder state estimation from measured cylinder pressure traces-a survey. IFAC-PapersOnLine 2017, 50, 11029–11039. [Google Scholar] [CrossRef]
- Hosseinzadeh, M. Robust control applications in biomedical engineering: Control of depth of hypnosis. In Control Applications for Biomedical Engineering Systems; Elsevier: Amsterdam, The Netherlands, 2020; pp. 89–125. [Google Scholar]
- Kefalas, A.; Ofner, A.B.; Pirker, G.; Posch, S.; Geiger, B.C.; Wimmer, A. Detection of knocking combustion using the continuous wavelet transformation and a convolutional neural network. Energies 2021, 14, 439. [Google Scholar] [CrossRef]
- Addison, P.S. The Illustrated Wavelet Transform Handbook Introductory Theory and Applications in Science, Engineering, Medicine and Finance; lOP Publishing Ltd.: Bristol, UK, 2002. [Google Scholar]
- Saeed, A.; Ragai, H.F. Implementation of fast discrete wavelet transform for vibration analysis on an FPGA. In Proceedings of the 2012 8th International Symposium on Communication Systems, Networks & Digital Signal Processing (CSNDSP), Poznan, Poland, 18–20 July 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Barandas, M.; Folgado, D.; Fernandes, L.; Santos, S.; Abreu, M.; Bota, P.; Liu, H.; Schultz, T.; Gamboa, H. Tsfel: Time series feature extraction library. SoftwareX 2020, 11, 100456. [Google Scholar] [CrossRef]
- Chakraborty, D.; Elzarka, H. Advanced machine learning techniques for building performance simulation: A comparative analysis. J. Build. Perform. Simul. 2019, 12, 193–207. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. Xgboost: A scalable tree boosting system. In Proceedings of the 22nd ACM Sigkdd International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Ilay Adler, A.; Painsky, A. Feature Importance in Gradient Boosting Trees with Cross-Validation Feature Selection. arXiv 2021, arXiv:2109.05468. [Google Scholar]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees; Routledge: London, UK, 2017. [Google Scholar]
- Lundberg, S.M.; Erion, G.; Chen, H.; DeGrave, A.; Prutkin, J.M.; Nair, B.; Katz, R.; Himmelfarb, J.; Bansal, N.; Lee, S.I. From local explanations to global understanding with explainable AI for trees. Nat. Mach. Intell. 2020, 2, 56–67. [Google Scholar] [CrossRef]



| Metric | Haar | Db4 | Sym4 | Coif6 |
|---|---|---|---|---|
| MAE | 3.00 | 3.97 | 3.94 | 4.31 |
| RMSE | 3.98 | 5.12 | 5.11 | 5.57 |
| 0.98 | 0.97 | 0.97 | 0.97 |
| Description | Name | Equations |
|---|---|---|
| 1. Index of minimum | arg_min | |
| 2. Index of maximum | arg_max | |
| 3. Variance | var | ) |
| 4. Maximum | max | |
| 5. Minimum | min | |
| 6. Maximum gradient | max_grad | |
| 7. Mean difference | mean_diff | |
| 8. Root mean square | rms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kefalas, A.; Ofner, A.B.; Pirker, G.; Posch, S.; Geiger, B.C.; Wimmer, A. Estimation of Combustion Parameters from Engine Vibrations Based on Discrete Wavelet Transform and Gradient Boosting. Sensors 2022, 22, 4235. https://doi.org/10.3390/s22114235
Kefalas A, Ofner AB, Pirker G, Posch S, Geiger BC, Wimmer A. Estimation of Combustion Parameters from Engine Vibrations Based on Discrete Wavelet Transform and Gradient Boosting. Sensors. 2022; 22(11):4235. https://doi.org/10.3390/s22114235
Chicago/Turabian StyleKefalas, Achilles, Andreas B. Ofner, Gerhard Pirker, Stefan Posch, Bernhard C. Geiger, and Andreas Wimmer. 2022. "Estimation of Combustion Parameters from Engine Vibrations Based on Discrete Wavelet Transform and Gradient Boosting" Sensors 22, no. 11: 4235. https://doi.org/10.3390/s22114235
APA StyleKefalas, A., Ofner, A. B., Pirker, G., Posch, S., Geiger, B. C., & Wimmer, A. (2022). Estimation of Combustion Parameters from Engine Vibrations Based on Discrete Wavelet Transform and Gradient Boosting. Sensors, 22(11), 4235. https://doi.org/10.3390/s22114235