
Threats from and Countermeasures for Unmanned Aerial and Underwater Vehicles

 ,
,
Abstract
:1. Introduction
2. Current and Future UAVs
2.1. Structure, Flight Characteristics, and Capabilities of Current UAVs
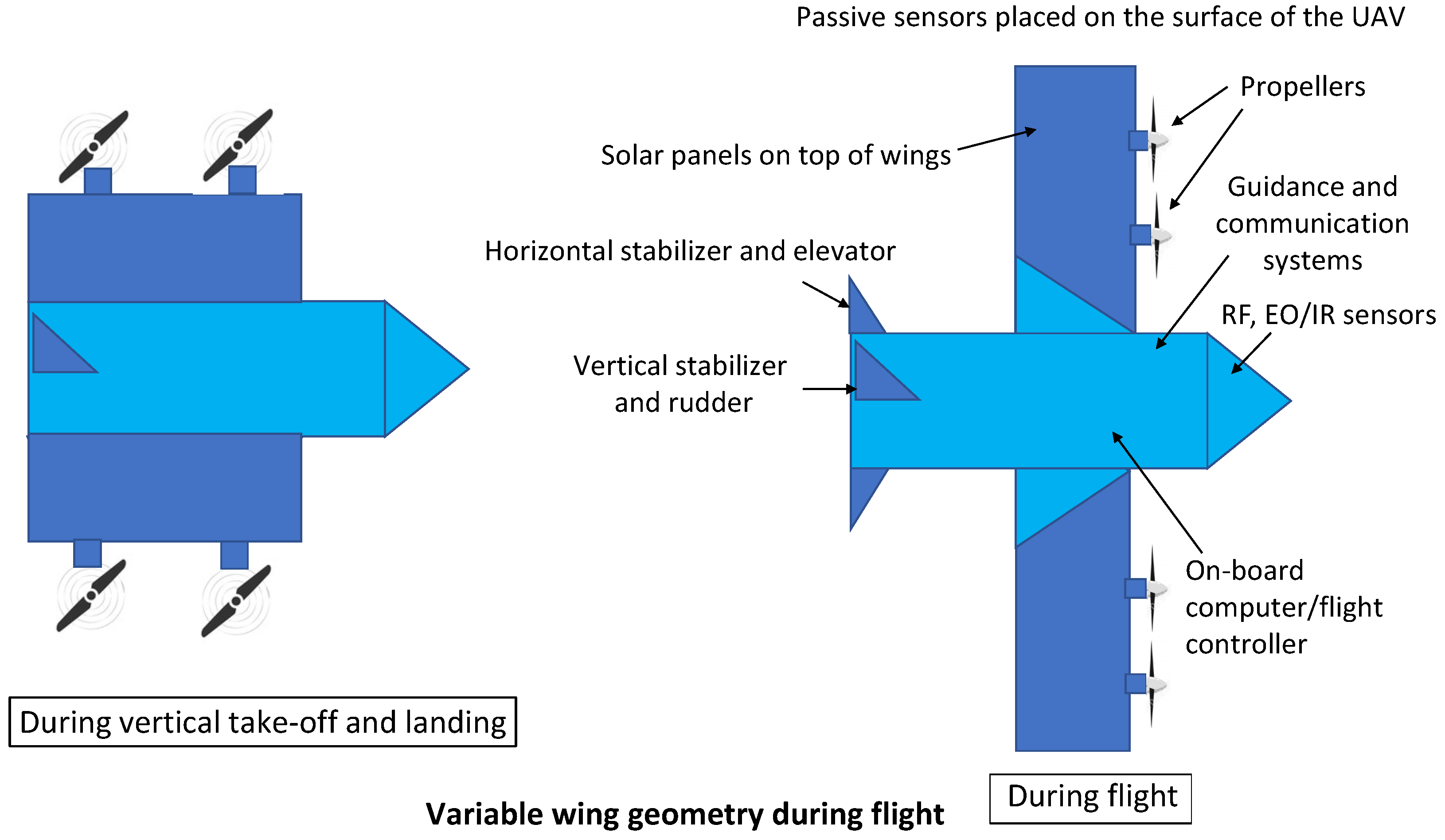
2.2. Expected Structure and Flight Characteristics of the Future UAVs
2.3. Expected Radio and Sensing Capabilities of Future UAVs
3. Challenges and Threats from Malicious UAVs
3.1. Challenging Features of UAVs
3.2. Autonomous UAVs
3.3. UAV Swarms
- Each UAV in the swarm can be assigned a specific task [29], (e.g., EO/IR imaging, ECM, RF sensing). Moreover, if the payload is large, then it can be divided into modules and carried separately by individual UAVs in the swarm and can be combined during the flight when required.
- In a UAV swarm, each UAV can either fly autonomously [30] following a pre-planned trajectory or cognitively adopt a trajectory [31] based on the real-time scenario using on-board sensors. AI algorithms can be used by each UAV in the swarm to coordinate with each other and/or the central controller. The central controller can be on the ground, a UAV in the swarm, or a manned aerial vehicle.
- UAV swarms can adopt different shapes in the air [32] and can be equipped with the ability to integrate and disintegrate in the air when required.
- UAV swarms can be used as airborne assets that can provide better situational awareness [33].
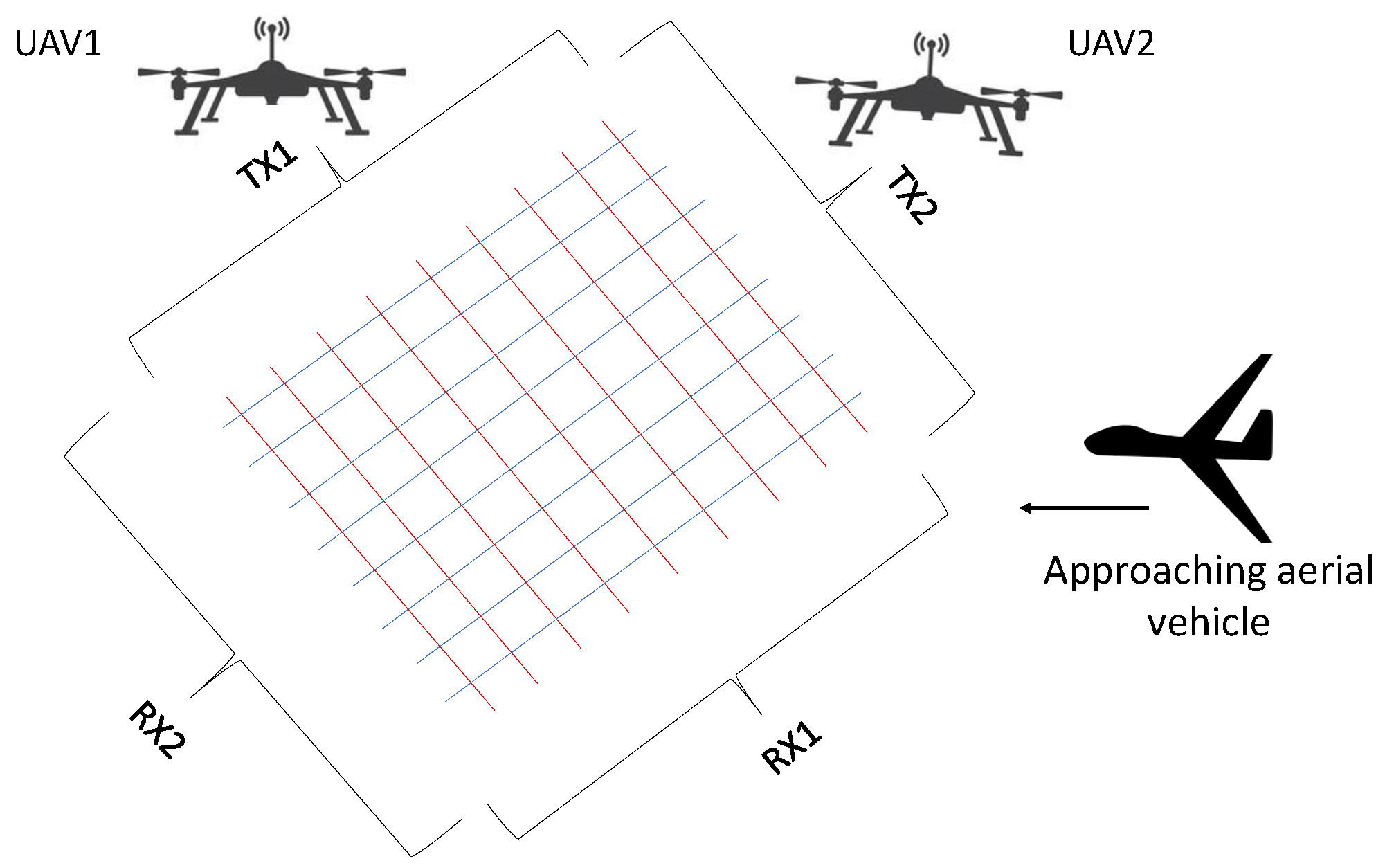
- A swarm of UAVs in the air can also be used to create an antenna array [34]. Each UAV can carry an antenna element. The antenna array and subsequently the radiation pattern can be reconfigured by changing the position of the UAVs.
- Miniaturized UAVs that have dimensions of a few inches can also be used in swarms [35]. The miniaturized UAVs in a swarm can work similarly to honey bees. There is a small effect of the environment on the flight of miniaturized UAVs (e.g., wind gusts). Miniaturized UAVs can also integrate to form large devices in the air in real time (e.g., to display patterns or to form a mobile phased array antenna in the air).
3.4. Electronic Countermeasures
- The RF link between the UAV and the remote controller is vulnerable to jamming [36] and hacking [37]. The jamming can be avoided by spread-spectrum techniques and high frequency-hopping rates. The hacking attempts can be thwarted by using multi-layered authentication and encryption. The threat of jamming and hacking can also be reduced by using redundant RF links.
- RF cognitive techniques can be used to analyze the energy distribution and hopping patterns of the RF jammer [38]. The analysis can help to adjust the RF parameters onboard the UAV accordingly to avoid jamming.
- GPS spoofing can be eliminated by identifying the spoofed GPS signals [39]. The comparison of signals from multiple navigation references (both internal and external) can help to identify the spoofed GPS signal.
- To save UAV onboard electronic equipment from high-energy electromagnetic (EM) radiation burst, metallic shielding can be used. Metallic and lead shielding can offer protection for the onboard electronic equipment against the EM radiation burst.
3.5. Types of Threats from Malicious UAVs
- Hazardous payloads that can be carried by mischievous UAVs for long distances.
- Surveillance and intelligence gathering by malicious UAVs (e.g., UAVs can be used to gather information near sensitive locations like police stations, borders, etc.).
- Illegal activities using UAVs. Numerous activities can be carried out by using mischievous UAVs (eavesdropping, stealing personal data, unauthorized imaging, identity theft, and starting a fire, etc.).
- Threats to governmental authorities, vehicles, and infrastructure. In particular, malicious UAVs can present a significant threat to sensitive infrastructure (e.g., nuclear power plants and chemical plants).
- Threats to crowded areas.
- Threats to the civil aviation industry. In the recent past, there were many reported incidents of mischievous UAVs interfering with the civilian flight operations [44].
- UAV swarms. At present, the threat of UAV swarms is difficult to counter.
- Unauthorized control of UAVs while flying. Hacking UAVs and flying them for malicious purposes.
4. Radar Systems for UAV Detection, Tracking, and Classification
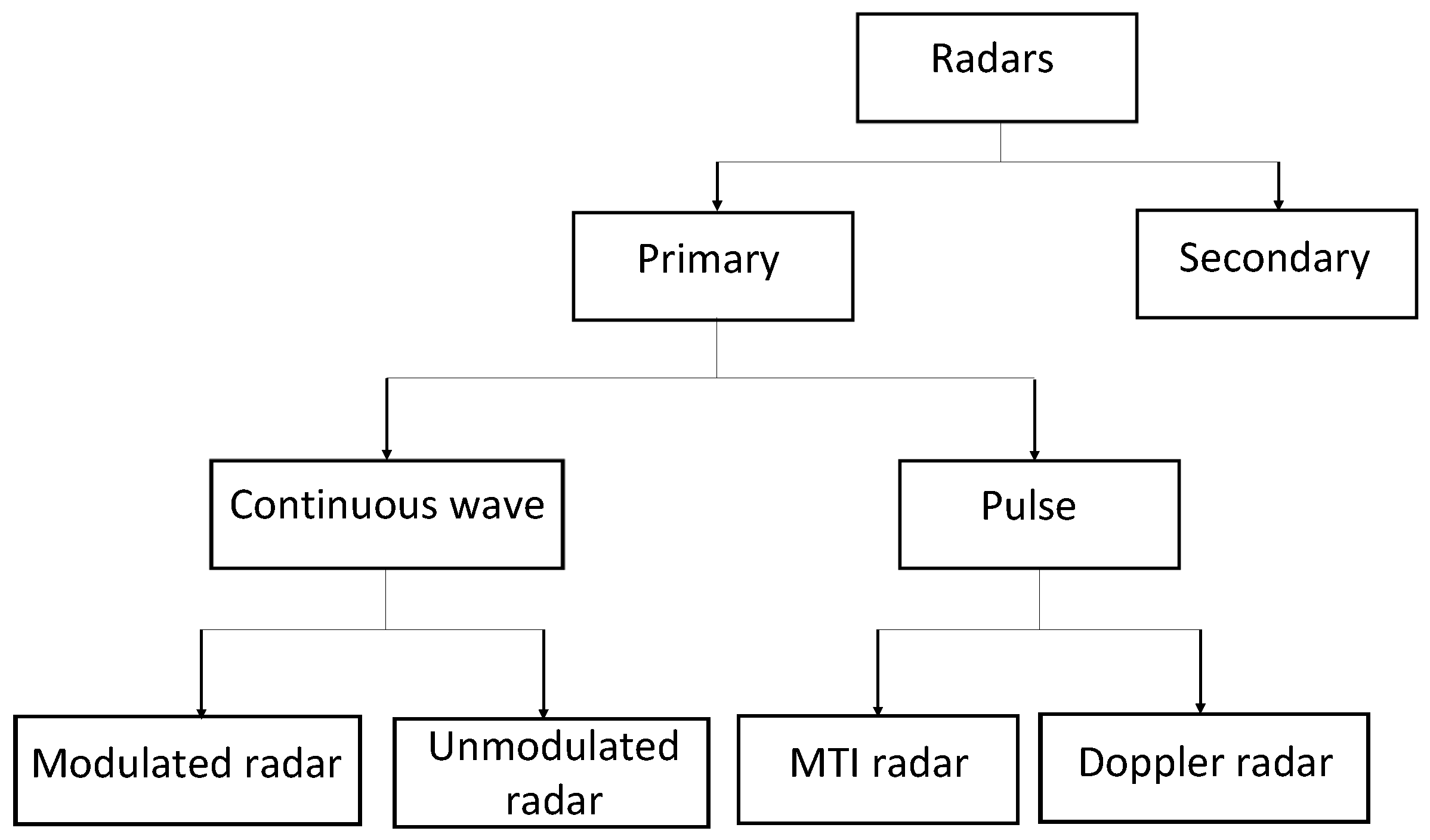
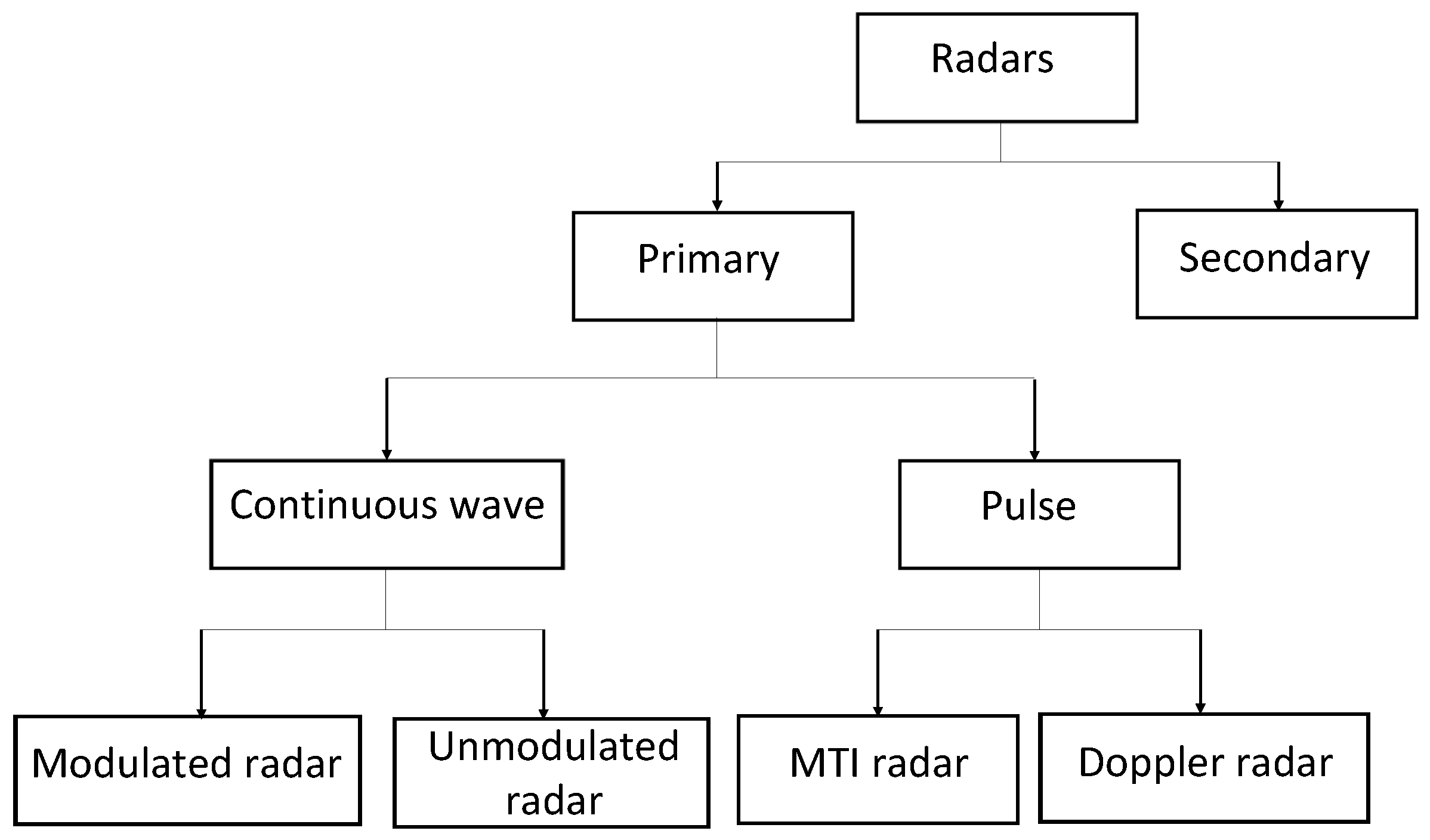
4.1. Conventional and Advanced Radar Systems
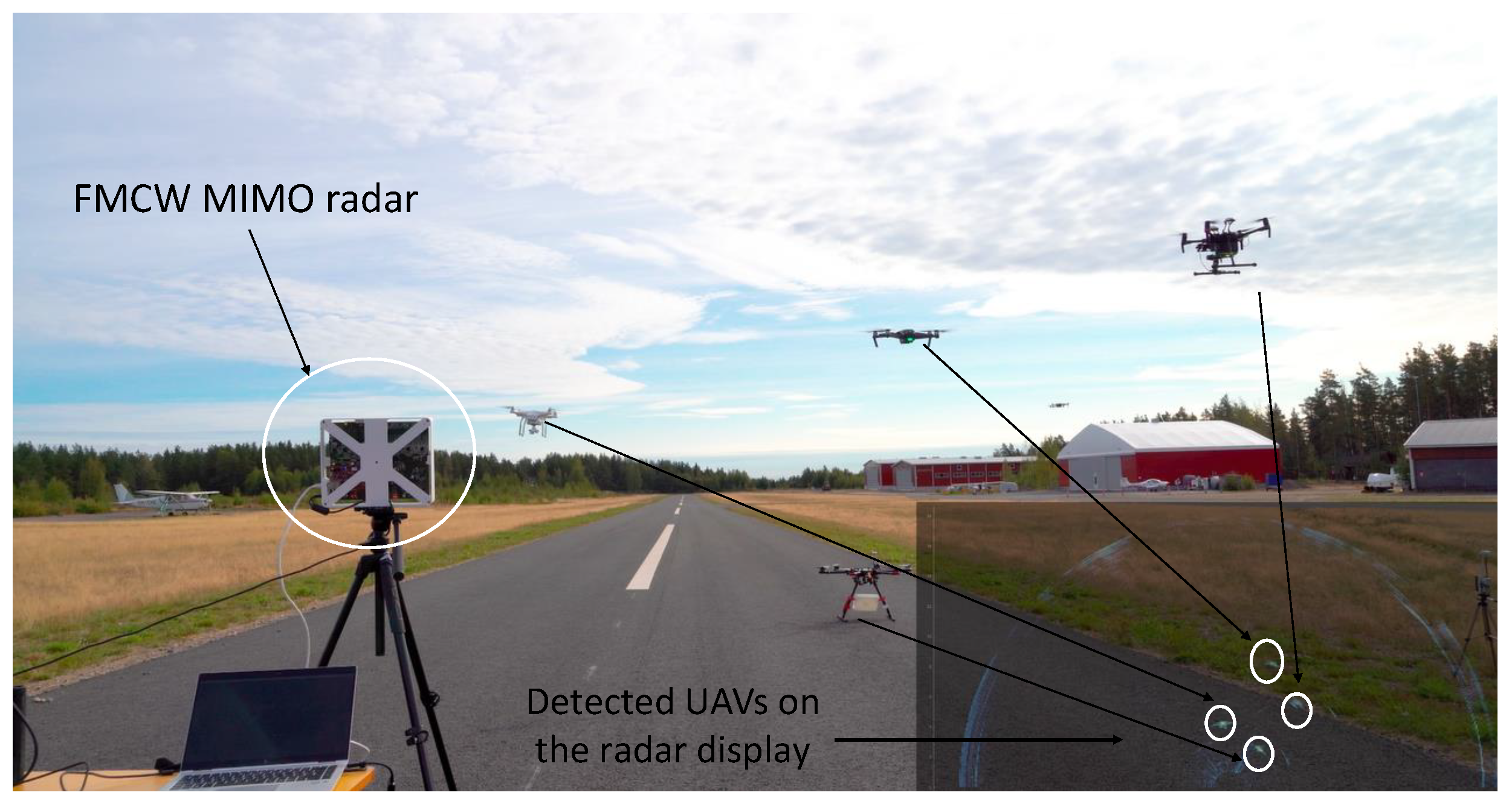
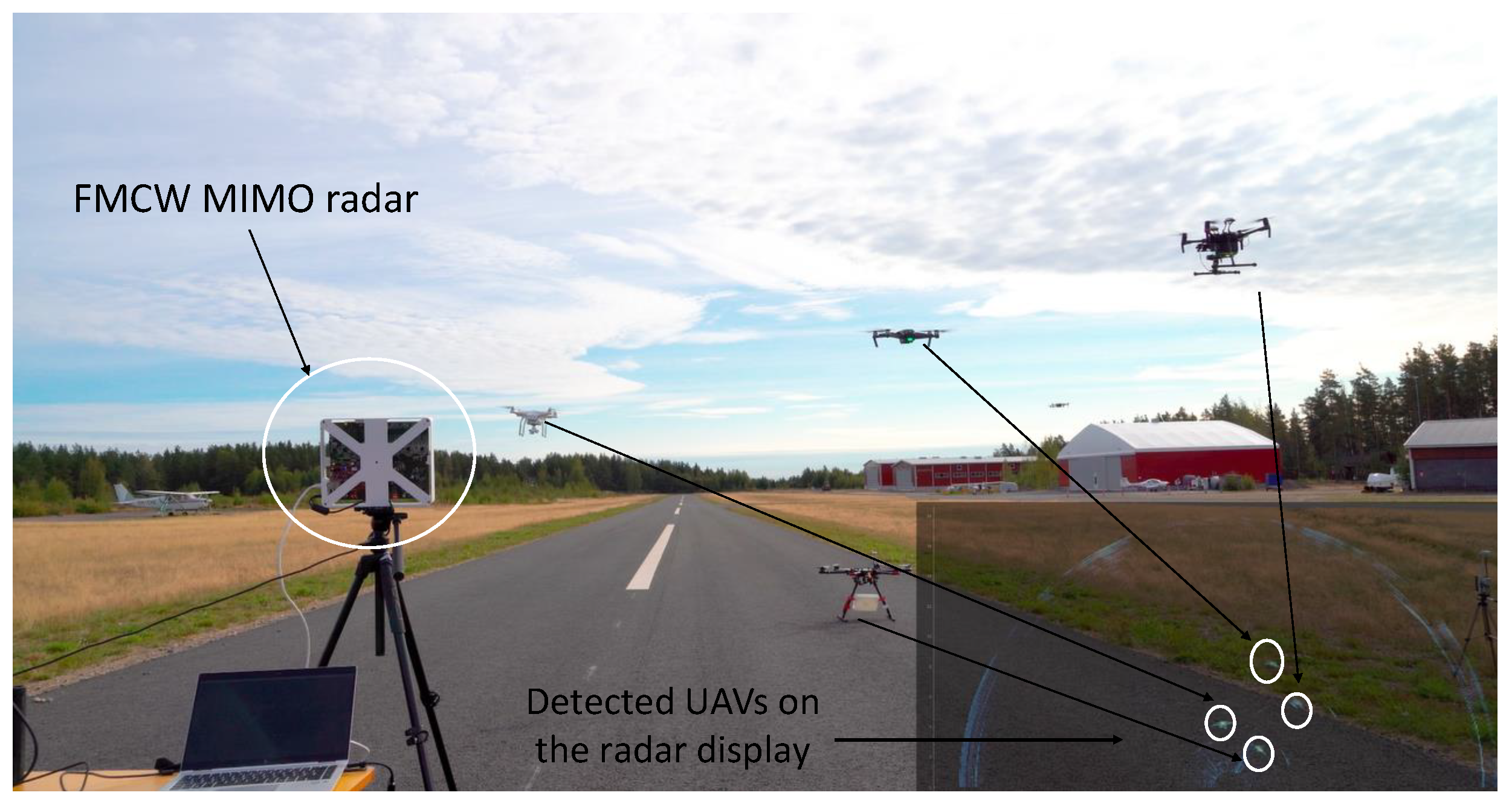
4.2. Detection of UAVs Using Radar Systems
4.3. Tracking of UAVs Using Radar Systems
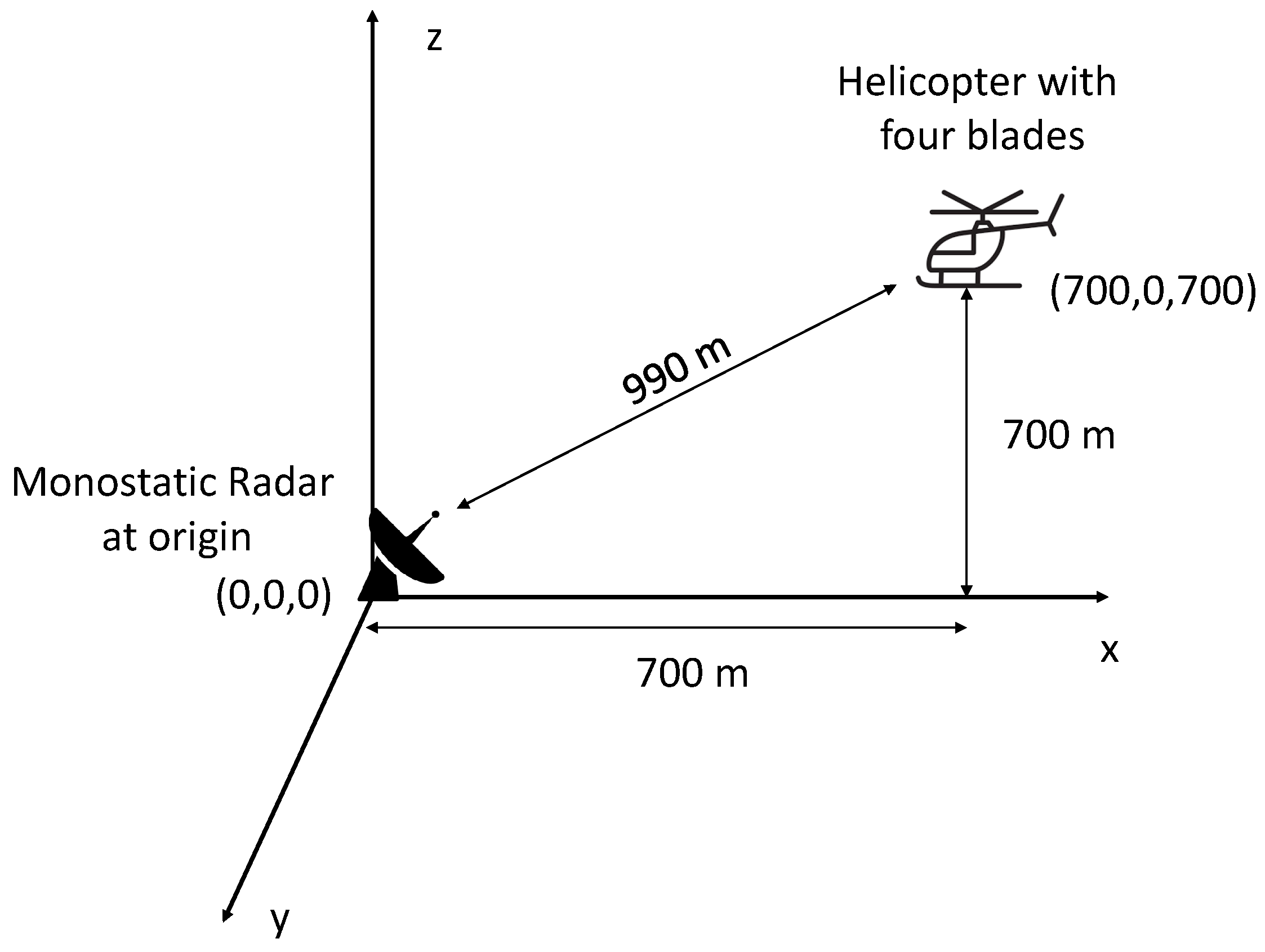
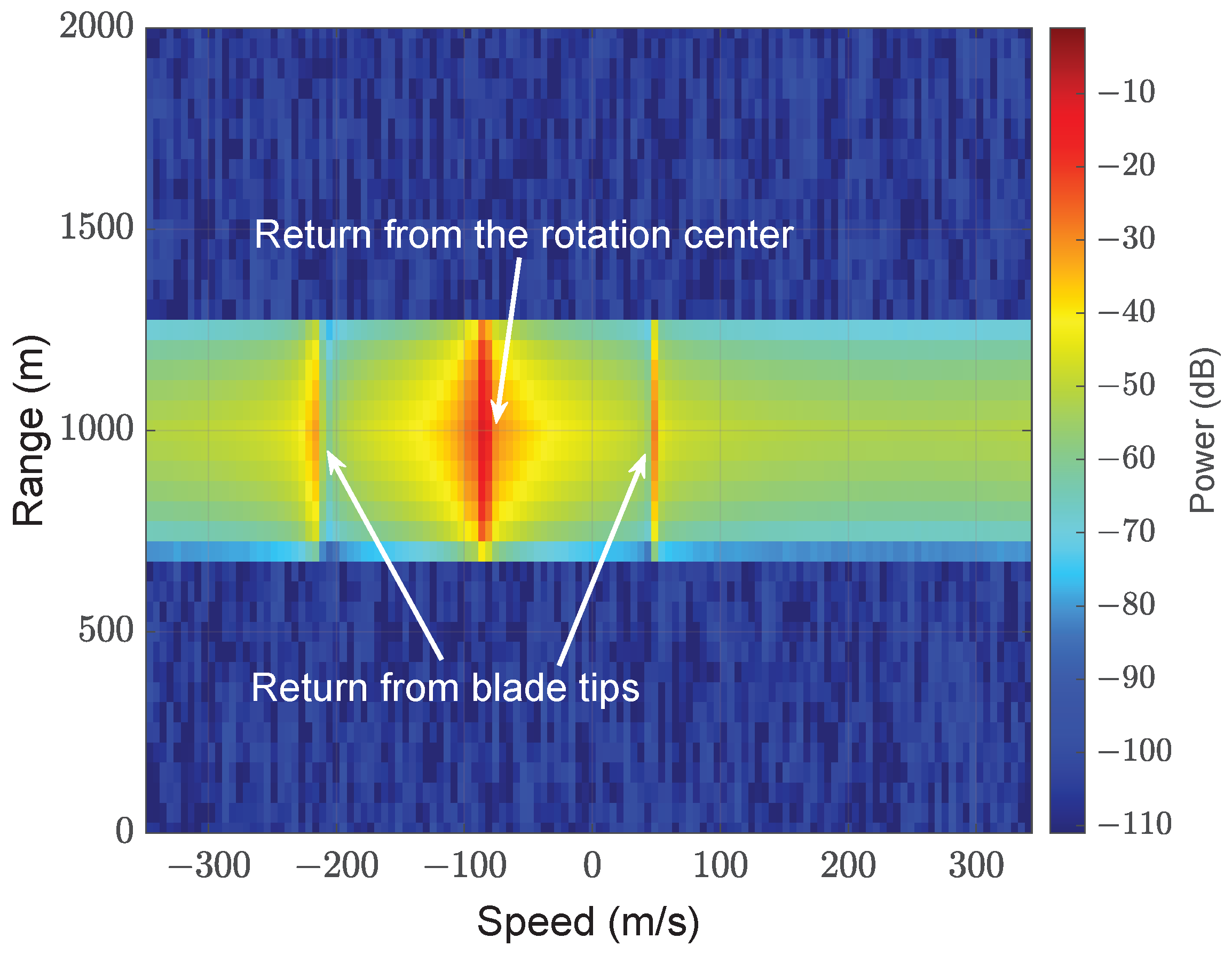
4.4. Classification of UAVs Using Radar Systems
4.5. Limitations of Radar Systems
- Radar systems are generally inefficient in terms of the energy transmitted and received. A large amount of transmit energy is required for the detection of small UAVs.
- Active radar systems have the risk of detection due to energy emission.
- There are limitations of the radar systems for detecting, tracking, and classifying small, low-flying UAVs in cluttered scenarios [92].
- The detection of small RCS aerial vehicles (e.g., UAVs) requires careful calibration of the radar system and constant adjustment of the detection threshold. The pfa for small-RCS aerial vehicles in cluttered environments generally increases [93].
- A large swarm of UAVs can overwhelm the majority of radar systems. The individual UAVs in a swarm are difficult to track by radar systems. Range and Doppler ambiguities are expected to increase for a given radar system detecting a large swarm of UAVs.
- Offensive ECMs used by UAVs can jam and spoof radar systems.
5. Methods Other Than Radar Systems for UAV Detection, Tracking, and Classification
5.1. EO/IR
5.2. RF Analysis
5.3. Acoustic Analysis
5.4. Sensor Fusion
5.5. Current Methods for Disabling UAVs
6. Future Research Directions for UAV utilization and their Detection, Tracking, and Classification
6.1. Potential Uses of UAVs
6.2. Modern Radar Systems
6.3. AI Techniques
6.4. Laser Beams
6.5. Space and Airborne Assets
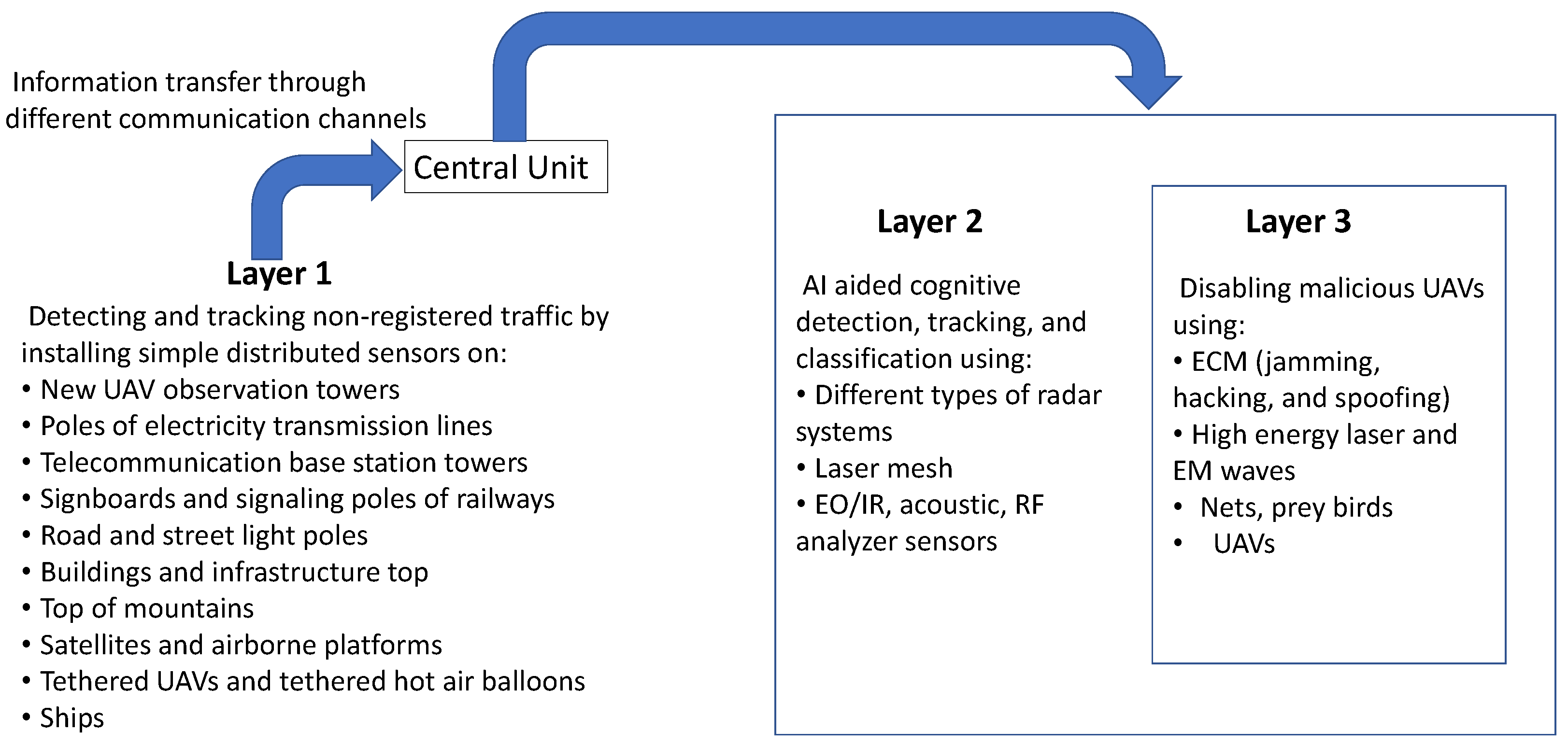
6.6. Distributed Sensors
6.7. Countering UAV Swarms
6.8. Regulating UAV Traffic
6.9. Terrain-Specific Countermeasures
7. Unmanned Underwater Vehicles
7.1. Capabilities of Current and Future Unmanned Underwater Vehicles
7.2. Challenges and Threats from Malicious UUVs
- Threat of unauthorized surveillance using malicious UUVs [132]. For example, UUVs can move close to coastal areas comparatively easily compared to manned underwater vehicles. While near the coastal areas, the UUVs can eavesdrop on the surroundings. Similarly, mischievous UUVs can be used to gather surveillance information while at sea by attaching to a large ship as a parasite.
- Threat of unauthorized smuggling using malicious UUVs [133]. Malicious UUVs can be used to carry contraband items undersea without detection.
- Threat of spoofing and jamming using mischievous UUVs. Malicious UUVs can be used to produce spoofed GPS signals that can divert ships. Malicious UUVs can also be used to hack/deny information between ships or between ship and air/ground transceivers.
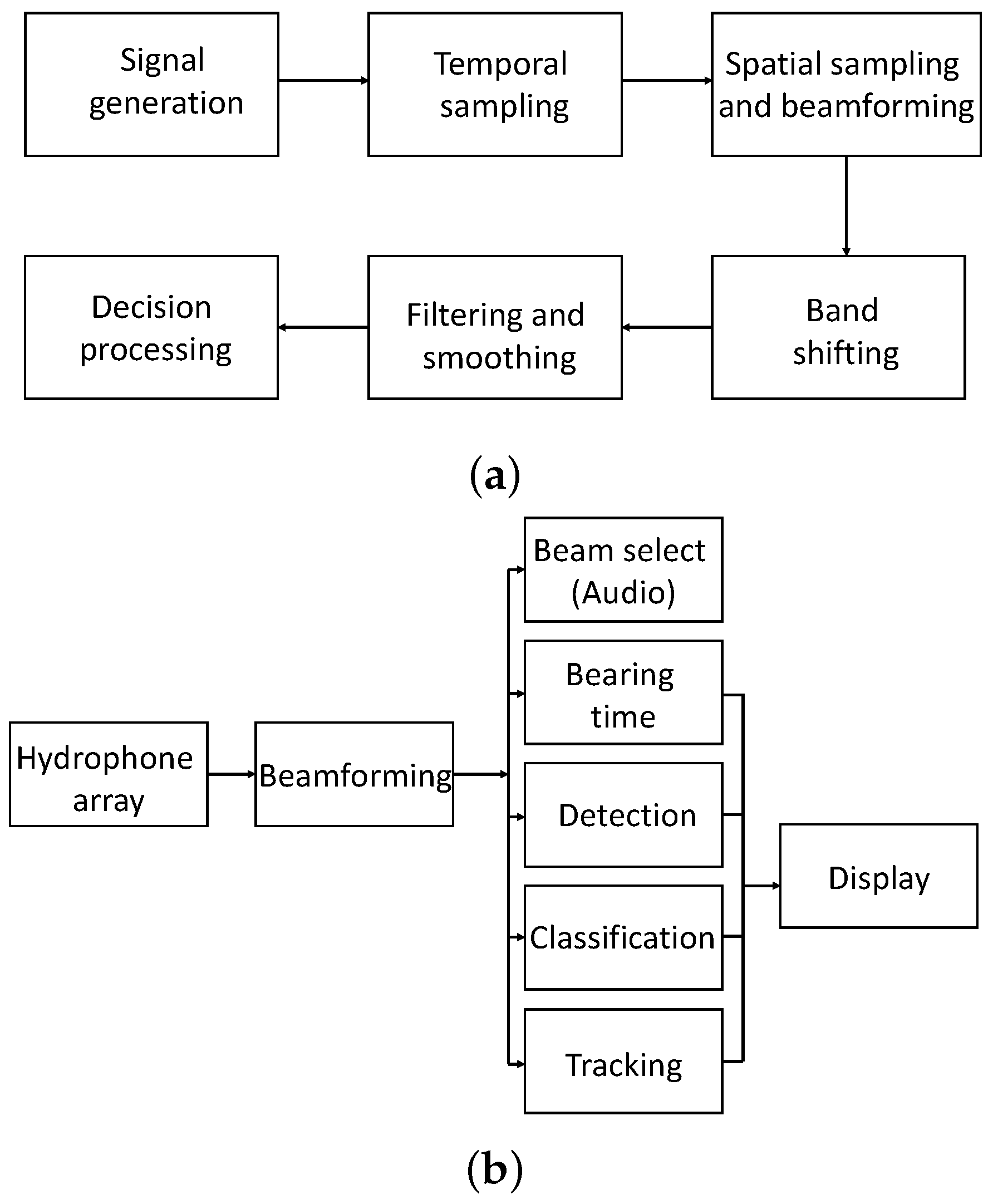
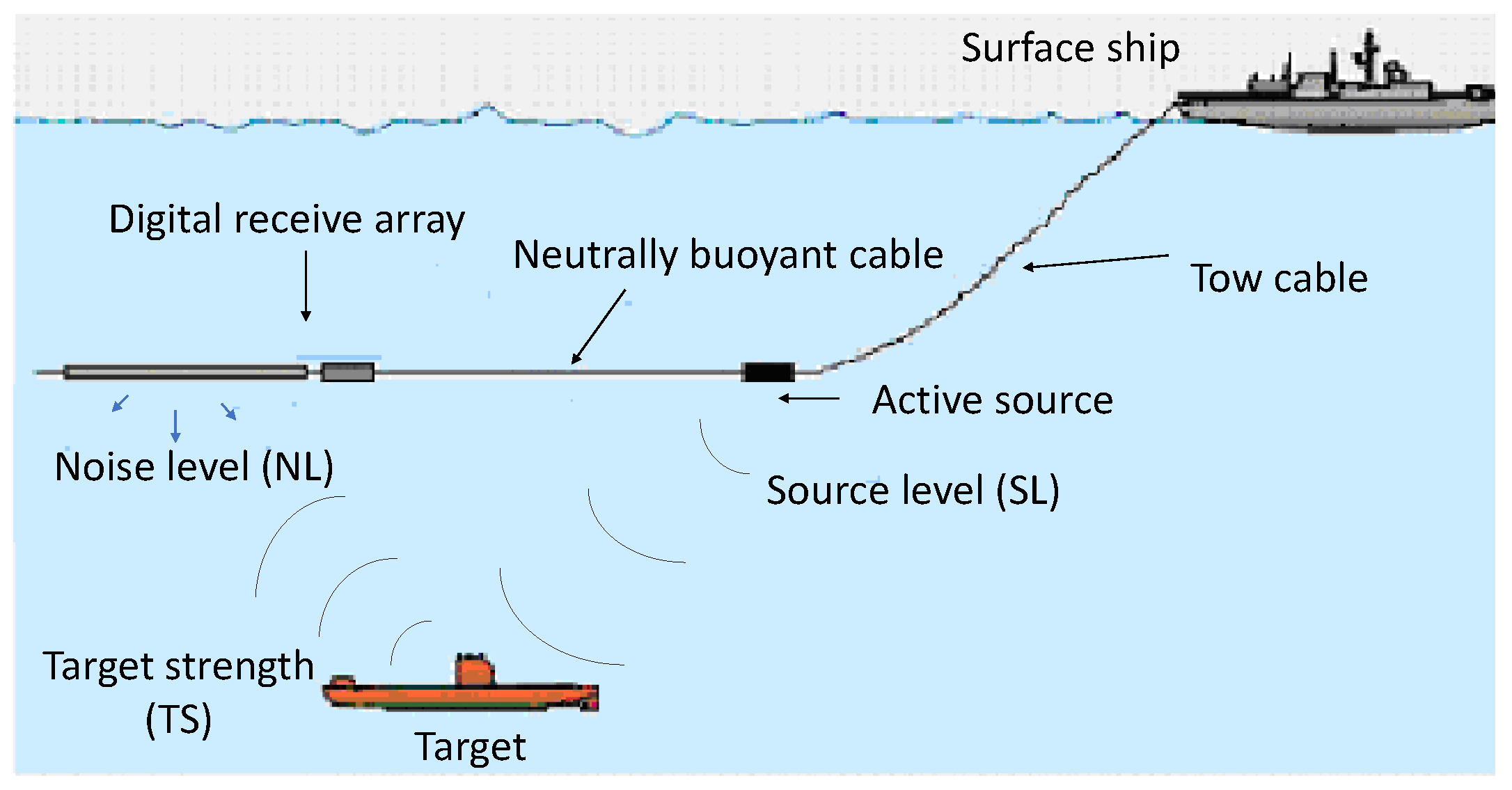
7.3. Detection, Tracking, and Classification Using Active Sonar and Passive Sonar
7.4. Future UUV Uses and Directions for Countering Malicious UUVs
- High-resolution underwater mapping of the seafloor, sea condition monitoring in a given area, and predicting turbulence and other unexpected changes in the water, similar to a weather forecast.
- Monitoring of marine flora and fauna.
- Navigation system similar to GPS using UUVs underwater.
- UUVs can be used for search and rescue and to help in disaster management. UUVs can also be used by law enforcement departments at sea.
- UUVs on the sea surface can provide radio beacons that can assist in long-distance communications in case the satellite link is down/not available. The radio beacons from UUVs can ensure that the ships move in designated lines and avoid collision.
- An underwater network of sensor nodes using UUVs can be created that can assist in different remote sensing applications.
- Monitoring and maintenance of underwater infrastructure, such as oil rigs and underwater oil and gas pipelines, power generation stations at sea, and optical fiber.
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Valuates Reports. Unmanned Aerial Vehicle (UAV) Market Size to Reach USD 72320 Million by 2028 at a CAGR of 14.4%. Available online: https://www.prnewswire.com/in/news-releases/unmanned-aerial-vehicle-uav-market-size-to-reach-usd-72320-million-by-2028-at-a-cagr-of-14-4-valuates-reports-870953616.html (accessed on 23 April 2022).
- Nawaz, H.; Ali, H.M.; Massan, S. Applications of unmanned aerial vehicles: A review. Tecnol. Glosas InnovaciÓN Apl. Pyme. Spec. Issue 2019, 2019, 85–105. [Google Scholar] [CrossRef]
- Kim, J.S.; Baek, D.; Seo, I.W.; Shin, J. Retrieving shallow stream bathymetry from UAV-assisted RGB imagery using a geospatial regression method. Geomorphology 2019, 341, 102–114. [Google Scholar] [CrossRef]
- Nikolakopoulos, K.G.; Lampropoulou, P.; Fakiris, E.; Sardelianos, D.; Papatheodorou, G. Synergistic use of UAV and USV data and petrographic analyses for the investigation of beachrock formations: A case study from Syros Island, Aegean Sea, Greece. Minerals 2018, 8, 534. [Google Scholar] [CrossRef] [Green Version]
- Specht, C.; Lewicka, O.; Specht, M.; Dąbrowski, P.; Burdziakowski, P. Methodology for carrying out measurements of the tombolo geomorphic landform using unmanned aerial and surface vehicles near Sopot Pier, Poland. J. Mar. Sci. Eng. 2020, 8, 384. [Google Scholar] [CrossRef]
- Research and Markets. Unmanned Aerial Vehicle (UAV) Market by Point of Sale, Systems, Platform (Civil & Commercial, and Defense & Governement), Function, End Use, Application, Type, Mode of Operation, MTOW, Range, and Region-Global Forecast to 2026. Available online: https://www.researchandmarkets.com/reports/5350868/unmanned-aerial-vehicle-uav-market-by-point-of (accessed on 20 August 2021).
- Yaacoub, J.P.; Noura, H.; Salman, O.; Chehab, A. Security analysis of drones systems: Attacks, limitations, and recommendations. Internet Things 2020, 11, 100218. [Google Scholar] [CrossRef]
- Dudush, A.; Tyutyunnik, V.; Trofymov, I.; Bortnovs’ Kiy, S.; Bondarenko, S. State of the Art and Problems of Defeat of Low, Slow and Small Unmanned Aerial Vehicles. Adv. Mil. Technol. 2018, 13, 157–171. [Google Scholar] [CrossRef]
- Beaudoin, L.; Gademer, A.; Avanthey, L.; Germain, V.; Vittori, V. Potential threats of UAS swarms and the countermeasure’s need. In Proceedings of the European Conference on Information Warfare and Security (ECIW), Tallinn, Estonia, 7–8 July 2011. [Google Scholar]
- Hartmann, K.; Giles, K. UAV exploitation: A new domain for cyber power. In Proceedings of the IEEE International Conference on Cyber Conflict (CyCon), Tallinn, Estonia, 31 May–3 June 2016; pp. 205–221. [Google Scholar]
- Palestini, C. Countering Drones: Looking for the Silver Bullet. Available online: https://www.nato.int/docu/review/articles/2020/12/16/countering-drones-looking-for-the-silver-bullet/index.html (accessed on 20 August 2021).
- Budiyono, A. Advances in unmanned underwater vehicles technologies: Modeling, control and guidance perspectives. Indian J. -Geo-Mar. Sci. 2009, 38, 282–295. [Google Scholar]
- Johnson, E.A. Unmanned Undersea Vehicles and Guided Missile Submarines: Technological and Operational Synergies; Number 27, Center for Strategy and Technology, AirWar College; Air University: Islamabad, Pakistan, 2002. [Google Scholar]
- Irizarry, J.; Johnson, E.N. Feasibility Study to Determine the Economic and Operational Benefits of Utilizing Unmanned Aerial Vehicles (UAVs); Technical Report; Georgia Institute of Technology: Atlanta, GA, USA, 2014. [Google Scholar]
- Kotarski, D.; Piljek, P.; Kasać, J. Design Considerations for Autonomous Cargo Transportation Multirotor UAVs. In Self-Driving Vehicles and Enabling Technologies; IntechOpen: London, UK, 2020. [Google Scholar]
- Neji, N.; Mostfa, T.; Sebbane, Y.B. Technology assessment for radio communication between uav and ground: Qualitative study and applications. In Proceedings of the IEEE Vehicular Technology Conference IEEE, Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–6. [Google Scholar]
- Elmokadem, T.; Savkin, A.V. Towards Fully Autonomous UAVs: A Survey. Sensors 2021, 21, 6223. [Google Scholar] [CrossRef] [PubMed]
- Khan, M.S.; Shah, S.I.A.; Javed, A.; Qadri, N.M.; Hussain, N. A critical analysis of small but heavy-lift multirotor and their flight controllers. In Proceedings of the International Bhurban Conference on Applied Sciences and Technologies (IBCAST), Islamabad, Pakistan, 12–16 January 2021; pp. 132–151. [Google Scholar]
- Ward, T. The Fastest Drone On Earth Just Reached Speeds Over 163 MPH. Available online: https://futurism.com/the-fastest-drone-on-earth-just-reached-speeds-over-163-mph (accessed on 7 March 2022).
- Global Security. Sukhoi S-70 Okhotnik-B. Available online: https://www.globalsecurity.org/military/world/russia/su-70-specs.htm (accessed on 7 March 2022).
- Katikala, S. Google project loon. InSight: Rivier Acad. J. 2014, 10, 1–6. [Google Scholar]
- Simic, M.; Bil, C.; Vojisavljevic, V. Investigation in wireless power transmission for UAV charging. Procedia Comput. Sci. 2015, 60, 1846–1855. [Google Scholar] [CrossRef] [Green Version]
- Molchanov, P.; Egiazarian, K.; Astola, J.; Harmanny, R.I.A.; de Wit, J.J.M. Classification of small UAVs and birds by micro-Doppler signatures. In Proceedings of the IEEE European Radar Conference, Nuremberg, Germany, 9–11 October 2013; pp. 172–175. [Google Scholar]
- Wang, C.; Wang, J.; Wang, J.; Zhang, X. Deep-Reinforcement-Learning-Based Autonomous UAV Navigation With Sparse Rewards. IEEE Internet Things J. 2020, 7, 6180–6190. [Google Scholar] [CrossRef]
- Bouhamed, O.; Ghazzai, H.; Besbes, H.; Massoud, Y. A UAV-Assisted Data Collection for Wireless Sensor Networks: Autonomous Navigation and Scheduling. IEEE Access 2020, 8, 110446–110460. [Google Scholar] [CrossRef]
- Javed, M.I.; Afghani, S.; Ali, S.I.; Baluch, M.F. Skill Free Tele-operation of Terrain Hugging UAV using an Advance Technique of Supervisory Command Optimization. Int. J. Adv. Eng. Technol. 2012, 3, 117. [Google Scholar]
- Qi, D.; Zhang, J.; Liang, X.; Li, Z.; Zuo, J.; Lei, P. Autonomous Reconnaissance and Attack Test of UAV Swarm Based on Mosaic Warfare Thought. In Proceedings of the IEEE International Conference on Robotics and Automation Engineering (ICRAE), Guangzhou, China, 19–22 November 2021; pp. 79–83. [Google Scholar]
- Tahir, A.; Böling, J.; Haghbayan, M.H.; Toivonen, H.T.; Plosila, J. Swarms of unmanned aerial vehicles—A survey. J. Ind. Inf. Integr. 2019, 16, 100106. [Google Scholar] [CrossRef]
- Lu, Y.; Ma, Y.; Wang, J.; Han, L. Task assignment of UAV swarm based on wolf pack algorithm. Appl. Sci. 2020, 10, 8335. [Google Scholar] [CrossRef]
- Bürkle, A.; Segor, F.; Kollmann, M. Towards autonomous micro UAV swarms. J. Intell. Robot. Syst. 2011, 61, 339–353. [Google Scholar] [CrossRef]
- Cai, Y.; Zhao, H.; Li, M.; Huang, H. 3D real-time path planning based on cognitive behavior optimization algorithm for UAV with TLP model. Clust. Comput. 2019, 22, 5089–5098. [Google Scholar] [CrossRef]
- Azam, M.A.; Mittelmann, H.D.; Ragi, S. UAV formation shape control via decentralized markov decision processes. Algorithms 2021, 14, 91. [Google Scholar] [CrossRef]
- You, H. Mission-driven autonomous perception and fusion based on UAV swarm. Chin. J. Aeronaut. 2020, 33, 2831–2834. [Google Scholar]
- Kocaman, I. Distributed Beamforming in a Swarm UAV Network; Technical Report; Naval Postgraduate School: Monterey, CA, USA, 2008. [Google Scholar]
- Lang, F. New Algorithm Allows a Swarm of Mini Drones to Fly Together. Available online: https://interestingengineering.com/new-algorithm-allows-a-swarm-of-mini-drones-to-fly-together (accessed on 15 May 2022).
- Pärlin, K. Jamming of Spread Spectrum Communications used in UAV Remote Control Systems. Master’s Thesis, Thomas Johann Seebeck Department of Electronics, School of Information Technologies, Tallinn University of Technology, Tallinn, Estonia, 2018. [Google Scholar]
- Siddiqi, M.A.; Iwendi, C.; Jaroslava, K.; Anumbe, N. Analysis on security-related concerns of unmanned aerial vehicle: Atacks, limitations, and recommendations. Math. Biosci. Eng. 2022, 19, 2641–2670. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Başar, T. Game-theoretic analysis of an aerial jamming attack on a UAV communication network. In Proceedings of the IEEE American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 818–823. [Google Scholar]
- Kerns, A.J.; Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E. Unmanned aircraft capture and control via GPS spoofing. J. Field Robot. 2014, 31, 617–636. [Google Scholar] [CrossRef]
- Sathyamoorthy, D. A review of security threats of unmanned aerial vehicles and mitigation steps. J. Def. Secur 2015, 6, 81–97. [Google Scholar]
- Dunkel, D. Drones: Security Threats from Above. Available online: https://www.securitymagazine.com/articles/95789-drones-security-threats-from-above (accessed on 15 May 2022).
- Rogers, J. Future Threats: Military UAS, Terrorist Drones, and the Dangers of the Second Drone Age. Available online: https://www.japcc.org/chapters/c-uas-future-threats-military-uas-terrorist-drones-and-the-dangers-of-the-second-drone-age/ (accessed on 15 May 2022).
- Townsend, K. Sky-high concerns: Understanding the Security Threat Posed by Drones. Available online: https://blog.avast.com/what-security-threats-are-posed-by-drones (accessed on 15 May 2022).
- Lykou, G.; Moustakas, D.; Gritzalis, D. Defending airports from UAS: A survey on cyber-attacks and counter-drone sensing technologies. Sensors 2020, 20, 3537. [Google Scholar] [CrossRef]
- Meikle, H. Modern Radar Systems; Artech House: Norwood, MA, USA, 2008. [Google Scholar]
- ReGuard. Multi-Role 3D Radar for the Detection and Tracking of Ground and Low-Flying Targets. Available online: https://www.retia.eu/wp-content/uploads/2021/04/ReGUARD.pdf (accessed on 26 February 2022).
- Mata-Moya, D.; Rey-Maestre, N.; Gómez-del Hoyo, P.J.; Rosado-Sanz, J.; Jarabo-Amores, M.P. 4D Passive Radar for Drone Detection and Tracking. In Proceedings of the IEEE International Radar Symposium (IRS), Berlin, Germany, 21–22 June 2021; pp. 1–10. [Google Scholar]
- Jarabo-Amores, M.P.; Mata-Moya, D.; Gómez-del Hoyo, P.J.; Bárcena-Humanes, J.; Rosado-Sanz, J.; Rey-Maestre, N.; Rosa-Zurera, M. Drone detection feasibility with passive radars. In Proceedings of the IEEE European Radar Conference (EuRAD), Madrid, Spain, 26–28 September 2018; pp. 313–316. [Google Scholar]
- Karpovich, P.; Kareneuski, S.; Zieliński, T.P. Practical Results of Drone Detection by Passive Coherent DVB-T2 Radar. In Proceedings of the IEEE International Radar Symposium (IRS), Warsaw, Poland, 5–8 October 2020; pp. 77–81. [Google Scholar]
- Venu, D.; Rao, N.K. A cross-correlation approach to determine target range in passive radar using FM Broadcast Signals. In Proceedings of the IEEE International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 23–25 March 2016; pp. 524–529. [Google Scholar]
- Wang, G.; Gu, C.; Inoue, T.; Li, C. A Hybrid FMCW-Interferometry Radar for Indoor Precise Positioning and Versatile Life Activity Monitoring. IEEE Trans. Microw. Theory Tech. 2014, 62, 2812–2822. [Google Scholar] [CrossRef]
- Wang, F.; Li, H. Joint Waveform and Receiver Design for Co-Channel Hybrid Active-Passive Sensing With Timing Uncertainty. IEEE Trans. Signal Process. 2020, 68, 466–477. [Google Scholar] [CrossRef] [Green Version]
- Al-Nuaim, T.; Alam, M.; Aldowesh, A. Low-Cost Implementation of a Multiple-Input Multiple-Output Radar Prototype for Drone Detection. In Proceedings of the IEEE International Symposium ELMAR, Zadar, Croatia, 23–25 September 2019; pp. 183–186. [Google Scholar]
- Yang, F.; Qu, K.; Hao, M.; Liu, Q.; Chen, X.; Xu, F. Practical Investigation of a MIMO Radar System for Small Drones Detection. In Proceedings of the IEEE International Radar Conference (RADAR), Toulon, France, 23–27 September 2019; pp. 1–5. [Google Scholar]
- Wang, Q.; Li, M.; Guo, Y. Cognitive radar waveform optimization for stealth target RCS estimation. In Proceedings of the IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–6. [Google Scholar]
- Christiansen, J.M. Fully Adaptive Radar for Detection and Tracking. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 2020. [Google Scholar]
- Forstén, H.; Kiuru, T.; Hirvonen, M.; Varonen, M.; Kaynak, M. Scalable 60 GHz FMCW Frequency-Division Multiplexing MIMO Radar. IEEE Trans. Microw. Theory Tech. 2020, 68, 2845–2855. [Google Scholar] [CrossRef]
- Bell, K.L.; Baker, C.J.; Smith, G.E.; Johnson, J.T.; Rangaswamy, M. Cognitive Radar Framework for Target Detection and Tracking. IEEE J. Sel. Top. Signal Process. 2015, 9, 1427–1439. [Google Scholar] [CrossRef]
- Hammer, M.; Hebel, M.; Laurenzis, M.; Arens, M. Lidar-based detection and tracking of small UAVs. In Emerging Imaging and Sensing Technologies for Security and Defence III; and Unmanned Sensors, Systems, and Countermeasures; International Society for Optics and Photonics: Bellingham, WA, USA, 2018; Volume 10799, p. 107990S. [Google Scholar]
- Knott, E.F.; Schaeffer, J.F.; Tulley, M.T. Radar Cross Section; SciTech Publishing: Raleigh, NC, USA, 2004. [Google Scholar]
- Nowak, A.; Naus, K.; Maksimiuk, D. A method of fast and simultaneous calibration of many mobile FMCW radars operating in a network anti-drone system. Remote Sens. 2019, 11, 2617. [Google Scholar] [CrossRef] [Green Version]
- Budge, M.C.; German, S.R. Basic RADAR Analysis; Artech House: Norwood, MA, USA, 2020. [Google Scholar]
- Oikonomou, D.; Nomikos, P.; Limnaios, G.; Zikidis, K. Passive Radars and their use in the Modern Battlefield. J. Comput. Model. 2019, 9, 37–61. [Google Scholar]
- Coluccia, A.; Parisi, G.; Fascista, A. Detection and Classification of Multirotor Drones in Radar Sensor Networks: A Review. Sensors 2020, 20, 4172. [Google Scholar] [CrossRef]
- Farlik, J.; Kratky, M.; Casar, J.; Stary, V. Multispectral detection of commercial unmanned aerial vehicles. Sensors 2019, 19, 1517. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, J.; Park, M.; Eo, I.; Koo, B. An X-Band FMCW Radar for Detection and Tracking of Miniaturized UAVs. In Proceedings of the IEEE International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 14–16 December 2017; pp. 1844–1845. [Google Scholar]
- Wang, C.; Tian, J.; Cao, J.; Wang, X. Deep Learning-Based UAV Detection in Pulse-Doppler Radar. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–12. [Google Scholar] [CrossRef]
- Guvenc, I.; Ozdemir, O.; Yapici, Y.; Mehrpouyan, H.; Matolak, D. Detection, localization, and tracking of unauthorized UAS and Jammers. In Proceedings of the IEEE Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017; pp. 1–10. [Google Scholar]
- Jian, M.; Lu, Z.; Chen, V.C. Drone detection and tracking based on phase-interferometric Doppler radar. In Proceedings of the IEEE Radar Conference, Oklahoma City, OK, USA, 23–27 April 2018; pp. 1146–1149. [Google Scholar]
- Taha, B.; Shoufan, A. Machine Learning-Based Drone Detection and Classification: State-of-the-Art in Research. IEEE Access 2019, 7, 138669–138682. [Google Scholar] [CrossRef]
- Howard, D.D.; Skolnik, M. Tracking radar. In Radar Handbook; McGraw-Hill: New York, NY, USA, 1990; pp. 18–43. [Google Scholar]
- Pulford, G.W. A Survey of Manoeuvring Target Tracking Methods. arXiv 2015, arXiv:1503.07828. [Google Scholar]
- Koch, W. Overview of problems and techniques in target tracking. In Proceedings of the IEE Colloquium on Trget Tracking: Algorithms and Applications, London, UK, 11–12 November 1999; pp. 1/1–1/4. [Google Scholar]
- Guerra, A.; Dardari, D.; Djuric, P.M. Dynamic Radar Networks of UAVs: A Tutorial Overview and Tracking Performance Comparison With Terrestrial Radar Networks. IEEE Vehic. Technol. Mag. 2020, 15, 113–120. [Google Scholar] [CrossRef]
- Kalinov, I.; Agishev, R. Effective Detection of Real Trajectories of Highly Maneuverable UAVs Under Strong Noise Conditions. In Proceedings of the IEEE Engineering and Telecommunication Conference (EnT-MIPT), Moscow, Russia, 15–16 November 2018; pp. 193–196. [Google Scholar]
- Karode, S.; Fusco, V. Multiple target tracking using retrodirective antenna arrays. In Proceedings of the IEEE National Conference on Antennas and Propagation, York, UK, 31 March–1 April 1999; pp. 178–181. [Google Scholar]
- Easthope, P.F. Tracking simulated UAV swarms using particle filters. In Proceedings of the IET Conferenec on Data Fusion Target Tracking Algorithms and Applications, Liverpool, UK, 30 April 2014; pp. 1–6. [Google Scholar]
- Kaniewski, P.; Gil, R.; Konatowski, S. Estimation of UAV position with use of smoothing algorithms. Metrol. Meas. Syst. 2017, 24, 127–142. [Google Scholar] [CrossRef]
- Choi, Y.; Jimenez, H.; Mavris, D.N. Two-layer obstacle collision avoidance with machine learning for more energy-efficient unmanned aircraft trajectories. Robot. Auton. Syst. 2017, 98, 158–173. [Google Scholar] [CrossRef]
- Gu, J.; Su, T.; Wang, Q.; Du, X.; Guizani, M. Multiple Moving Targets Surveillance Based on a Cooperative Network for Multi-UAV. IEEE Communs. Mag. 2018, 56, 82–89. [Google Scholar] [CrossRef]
- Banerjee, P.; Corbetta, M. In-Time UAV Flight-Trajectory Estimation and Tracking Using Bayesian Filters. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–9. [Google Scholar]
- Chen, V.C. The Micro-Doppler Effect in Radar; Artech house: Norwood, MA, USA, 2019. [Google Scholar]
- Torvik, B.; Olsen, K.E.; Griffiths, H. Classification of birds and UAVs based on radar polarimetry. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1305–1309. [Google Scholar] [CrossRef]
- Wojtanowski, J.; Zygmunt, M.; Drozd, T.; Jakubaszek, M.; Życzkowski, M.; Muzal, M. Distinguishing Drones from Birds in a UAV Searching Laser Scanner Based on Echo Depolarization Measurement. Sensors 2021, 21, 5597. [Google Scholar] [CrossRef]
- Zhang, X.; Mehta, V.; Bolic, M.; Mantegh, I. Hybrid AI-enabled Method for UAS and Bird Detection and Classification. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11–14 October 2020; pp. 2803–2807. [Google Scholar]
- Patel, J.S.; Fioranelli, F.; Anderson, D. Review of radar classification and RCS characterisation techniques for small UAVs or drones. IET Radar Sonar Navig. 2018, 12, 911–919. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Xiang, X.; Li, Y.; Chen, G. Enhanced Micro-Doppler Feature Analysis for Drone Detection. In Proceedings of the IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 7–14 May 2021; pp. 1–4. [Google Scholar]
- De Wit, J.J.; Gusland, D.; Trommel, R.P. Radar Measurements for the Assessment of Features for Drone Characterization. In Proceedings of the IEEE European Radar Conference (EuRAD), Utrecht, The Netherlands, 10–15 January 2021; pp. 38–41. [Google Scholar]
- Khawaja, W.; Ozturk, E.; Guvenc, I. Doors in the Sky: Detection, Localization and Classification of Aerial Vehicles using Laser Mesh. arXiv 2021, arXiv:2111.07231. [Google Scholar] [CrossRef]
- MathWorks. Introduction to Micro-Doppler Effects. Available online: https://www.mathworks.com/help/radar/ug/introduction-to-micro-doppler-effects.html (accessed on 7 February 2022).
- Newman, J.F.; LaDue, D.; Heinselman, P.L. Identifying critical strengths and limitations of current radar systems. In Proceedings of the Preprints, 24th Conference on Severe Local Storms, Savannah, GA, USA, 24–31 October 2008; Volume 7. [Google Scholar]
- Ezuma, M.; Ozdemir, O.; Anjinappa, C.K.; Gulzar, W.A.; Guvenc, I. Micro-UAV Detection with a Low-Grazing Angle Millimeter Wave Radar. In Proceedings of the IEEE Radio and Wireless Symposium (RWS), Orlando, FL, USA, 20–23 January 2019; pp. 1–4. [Google Scholar]
- Chahrour, H.; Dansereau, R.M.; Rajan, S.; Balaji, B. Target Detection Through Riemannian Geometric Approach With Application to Drone Detection. IEEE Access 2021, 9, 123950–123963. [Google Scholar] [CrossRef]
- Waldron, G. Rafael Introduces New Miniaturised EO/IR Sensor. Available online: https://www.flightglobal.com/singapore-air-show-2020/rafael-introduces-new-miniaturised-eo/ir-sensor/136634.article (accessed on 20 September 2021).
- Tufano, F.; Angelino, C.V.; Cicala, L. Visual target detection and tracking in UAV EO/IR videos by moving background subtraction. In Proceedings of the International Conference on Advanced Concepts for Intelligent Vision Systems, Lecce, Italy, 24–27 October 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 547–558. [Google Scholar]
- Siewert, S.B.; Andalibi, M.; Bruder, S.; Rizor, S. Slew-to-Cue Electro-Optical and Infrared Sensor Network for small UAS Detection, Tracking and Identification. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 2264. [Google Scholar]
- Ezuma, M.; Erden, F.; Anjinappa, C.K.; Ozdemir, O.; Guvenc, I. Micro-UAV Detection and Classification from RF Fingerprints Using Machine Learning Techniques. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–13. [Google Scholar]
- Nemer, I.; Sheltami, T.; Ahmad, I.; Yasar, A.U.H.; Abdeen, M.A. RF-Based UAV Detection and Identification Using Hierarchical Learning Approach. Sensors 2021, 21, 1947. [Google Scholar] [CrossRef]
- Ezuma, M.; Erden, F.; Kumar Anjinappa, C.; Ozdemir, O.; Guvenc, I. Detection and Classification of UAVs Using RF Fingerprints in the Presence of Wi-Fi and Bluetooth Interference. IEEE Open J. Commun. Soc. 2020, 1, 60–76. [Google Scholar] [CrossRef]
- Welschen, S.; Leuchtmann, P.; Leuthold, J.; Schüpbach, C.; Paine, S.; Böniger, U. Localization of Micro Unmanned Aerial Vehicles using Digital Audio Broadcast Signals. In Proceedings of the IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar]
- Yang, B.; Matson, E.T.; Smith, A.H.; Dietz, J.E.; Gallagher, J.C. UAV Detection System with Multiple Acoustic Nodes Using Machine Learning Models. In Proceedings of the IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; pp. 493–498. [Google Scholar]
- Al-Emadi, S.; Al-Ali, A. Audio-Based Drone Detection and Identification Using Deep Learning Techniques with Dataset Enhancement through Generative Adversarial Networks. Sensors 2021, 21, 4953. [Google Scholar] [CrossRef]
- Kratky, M.; Farlik, J.; Casar, J.; Stary, V. Commercial UAVs Multispectral Detection; NATO: Washington, DC, USA, 2011. [Google Scholar]
- Knight, J. Countering Unmanned Aircraft Systems. Ph.D. Thesis, Naval Postgraduate School, Monterey, CA, USA, 2019. [Google Scholar]
- Malimban, J.; Payne, B.R.; Abegaz, T.T. Drone Hacking: Applying the Cyber Kill Chain to Hijack Unmanned Aerial Systems. QRBD 2021, 8, 213. [Google Scholar]
- Science Focus. Drone-Killer Fires Microwave Beams to Disable UAVs. Available online: https://www.sciencefocus.com/future-technology/drone-killer-fires-microwave-beams-to-disable-uavs/ (accessed on 18 February 2022).
- Chaari, M.Z.; Al-Maadeed, S. Testing the efficiency of laser technology to destroy the rogue drones. Secur. Def. Q. 2020, 32, 31–38. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Mukhamediev, R.I.; Symagulov, A.; Kuchin, Y.; Zaitseva, E.; Bekbotayeva, A.; Yakunin, K.; Assanov, I.; Levashenko, V.; Popova, Y.; Akzhalova, A.; et al. Review of Some Applications of Unmanned Aerial Vehicles Technology in the Resource-Rich Country. Appl. Sci. 2021, 11, 10171. [Google Scholar] [CrossRef]
- Noor, N.M.; Abdullah, A.; Hashim, M. Remote sensing UAV/drones and its applications for urban areas: A review. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Volume 169, 9th IGRSM International Conference and Exhibition on Geospatial & Remote Sensing (IGRSM 2018), Kuala Lumpur, Malaysia, 24–25 April 2018; IOP Publishing: Bristol, UK, 2018; Volume 169, p. 012003. [Google Scholar]
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I.; Idries, A.; Mohammed, F. Unmanned aerial vehicles applications in future smart cities. Technol. Forecast. Soc. Chang. 2020, 153, 119293. [Google Scholar] [CrossRef]
- Fang, G.; Yi, J.; Wan, X.; Liu, Y.; Ke, H. Experimental Research of Multistatic Passive Radar With a Single Antenna for Drone Detection. IEEE Access 2018, 6, 33542–33551. [Google Scholar] [CrossRef]
- Poullin, D. Countering illegal UAV flights: Passive DVB radar potentiality. In Proceedings of the IEEE International Radar Symposium (IRS), Bonn, Germany, 20–22 June 2018; pp. 1–10. [Google Scholar]
- Zhe, Z.Y.M.D.W.; Kao, Z. Radar Scattering Characteristic Test and Analysis of Two Stealth Aircraft Models. J. Beijing Univ. Aeronaut. Astronaut. 2003, 29, 147–150. [Google Scholar]
- El-Kamchouchy, H.; Saada, K.; Hafez, A.E.D.S. Optimum stealthy aircraft detection using a multistatic radar. In Proceedings of the IEEE International Conference on Advanced Communication Technology, Pyeongchang, Korea, 16–19 February 2014; pp. 337–342. [Google Scholar]
- Liu, Y.; Wan, X.; Tang, H.; Yi, J.; Cheng, Y.; Zhang, X. Digital television based passive bistatic radar system for drone detection. In Proceedings of the IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 1493–1497. [Google Scholar]
- MathWorks. Tracking Using Bistatic Range Detections. Available online: https://www.mathworks.com/help/fusion/ug/track-using-bistatic-range-detections.html (accessed on 15 February 2022).
- Hoffmann, F.; Ritchie, M.; Fioranelli, F.; Charlish, A.; Griffiths, H. Micro-Doppler based detection and tracking of UAVs with multistatic radar. In Proceedings of the IEEE radar conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–6. [Google Scholar]
- Wang, X.; Liang, H.; Wang, P. Detection and Tracking of UAVs using Interferometric Radar. In Proceedings of the IEEE International Radar Conference (RADAR), Toulon, France, 23–27 September 2019; pp. 1–6. [Google Scholar]
- Sun, Y.; Abeywickrama, S.; Jayasinghe, L.; Yuen, C.; Chen, J.; Zhang, M. Micro-Doppler Signature-Based Detection, Classification, and Localization of Small UAV With Long Short-Term Memory Neural Network. IEEE Trans. Geosci. Remote Sens. 2021, 59, 6285–6300. [Google Scholar] [CrossRef]
- Gusland, D.; Rolfsjord, S.; Torvik, B. Deep temporal detection—A machine learning approach to multiple-dwell target detection. In Proceedings of the IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020; pp. 203–207. [Google Scholar]
- Lee, D.; Gyu La, W.; Kim, H. Drone Detection and Identification System using Artificial Intelligence. In Proceedings of the IEEE International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 17–19 October 2018; pp. 1131–1133. [Google Scholar]
- Behera, D.K.; Bazil Raj, A. Drone Detection and Classification using Deep Learning. In Proceedings of the IEEE International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 13–15 May 2020; pp. 1012–1016. [Google Scholar]
- Partridge, D.; Wilks, Y. The Foundations of Artificial Intelligence: A Sourcebook; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Rumba, R.; Nikitenko, A. The wild west of drones: A review on autonomous- UAV traffic-management. In Proceedings of the PIEEE International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1317–1322. [Google Scholar]
- Yang, Y.; Xiao, Y.; Li, T. A Survey of Autonomous Underwater Vehicle Formation: Performance, Formation Control, and Communication Capability. IEEE Communs. Surv. Tutorials 2021, 23, 815–841. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Peng, Z.; Cui, J.H.; Fiondella, L. Suave: Swarm underwater autonomous vehicle localization. In Proceedings of the IEEE INFOCOM Conference, Toronto, ON, Canada, 27 April–2 May 2014; pp. 64–72. [Google Scholar]
- Griffiths, G. Technology and Applications of Autonomous Underwater Vehicles; CRC Press: Boca Raton, FL, USA, 2002; Volume 2. [Google Scholar]
- Jenkins, S.A.; Humphreys, D.E.; Sherman, J.; Osse, J.; Jones, C.; Leonard, N.; Graver, J.; Bachmayer, R.; Clem, T.; Carroll, P.; et al. Underwater Glider System Study; eScholarship: Oakland, CA, USA, 2003. [Google Scholar]
- Wu, Y.; Yan, S.; Li, S.; Song, H. An acoustic positioning of underwater vehicles using synthetic long baseline navigation. In Proceedings of the IEEE OCEANS Conference, Shanghai, China, 10–13 April 2016; pp. 1–5. [Google Scholar]
- Luo, Q.; Yan, X.; Ju, C.; Chen, Y.; Luo, Z. An Ultra-Short Baseline Underwater Positioning System with Kalman Filtering. Sensors 2021, 21, 143. [Google Scholar] [CrossRef] [PubMed]
- Azad, S.; Casari, P.; Zorzi, M. Coastal patrol and surveillance networks using AUVs and delay-tolerant networking. In Proceedings of the IEEE Oceans—Yeosu, Yeosu, Korea, 21–24 May 2012; pp. 1–8. [Google Scholar]
- Keller, J. Coast Guard Looks for Unmanned Ocean Vehicles to Hunt Smugglers, Poachers, and Icebergs. Available online: https://www.militaryaerospace.com/unmanned/article/16719196/coast-guard-looks-for-unmanned-ocean-vehicles-to-hunt-smugglers-poachers-and-icebergs (accessed on 15 May 2022).
- Petritoli, E.; Cagnetti, M.; Leccese, F. Simulation of Autonomous Underwater Vehicles (AUVs) Swarm Diffusion. Sensors 2020, 20, 4950. [Google Scholar] [CrossRef] [PubMed]
- Vedachalam, N.; Ramesh, R.; Jyothi, V.B.N.; Doss Prakash, V.; Ramadass, G. Autonomous underwater vehicles-challenging developments and technological maturity towards strategic swarm robotics systems. Mar. Georesources Geotechnol. 2019, 37, 525–538. [Google Scholar] [CrossRef]
- Eleftherakis, D.; Vicen-Bueno, R. Sensors to increase the security of underwater communication cables: A review of underwater monitoring sensors. Sensors 2020, 20, 737. [Google Scholar] [CrossRef] [Green Version]
- Tipsuwan, Y.; Hoonsuwan, P. Design and implementation of an AUV for petroleum pipeline inspection. In Proceedings of the IEEE International Conference on Information Technology and Electrical Engineering (ICITEE), Chiang Mai, Thailand, 29–30 October 2015; pp. 382–387. [Google Scholar]
- Bannister, P. ELF propagation update. IEEE J. Ocean. Eng. 1984, 9, 179–188. [Google Scholar] [CrossRef] [Green Version]
- Lurton, X. An Introduction to Underwater Acoustics: Principles and Applications; Springer: Berlin/Heidelberg, Germany, 2002; Volume 2. [Google Scholar]
- Feng, H.; Yu, J.; Huang, Y.; Qiao, J.; Wang, Z.; Xie, Z.; Liu, K. Adaptive coverage sampling of thermocline with an autonomous underwater vehicle. Ocean Eng. 2021, 233, 109151. [Google Scholar] [CrossRef]
- Fitzpatrick, A.; Singhvi, A.; Arbabian, A. An Airborne Sonar System for Underwater Remote Sensing and Imaging. IEEE Access 2020, 8, 189945–189959. [Google Scholar] [CrossRef]
- Bienvenu, G. Signal sonar processing. In Proceedings of the IEEE International Conference on Digital Signal Processing Proceedings, Santorini, Greece, 1–3 July 2002; Volume 1, pp. 441–446. [Google Scholar]
- MIT OpenCourseWare. Introduction to Sonar. Available online: https://ocw.mit.edu/courses/mechanical-engineering/2-011-introduction-to-ocean-science-and-engineering-spring-2006/readings/hw5_sonar_leonar.pdf (accessed on 19 February 2022).
- Curtis, T. Sonar Technology-Past and Current; Tethnical Rexport; Curtis Technology Ltd.: Southall, UK, 2004; Available online: http://www.curtistech.co.uk/papers/sonarpc.pdf (accessed on 20 April 2022).
- Pike, J. Uderwater Detection and Tracking Systems. Available online: https://fas.org/man/dod-101/navy/docs/fun/part09.htm (accessed on 16 March 2022).
- Nuclear Threat Initiative. Submarine Detection and Monitoring: Open-Source Tools and Technologies. Available online: https://www.nti.org/analysis/articles/submarine-detection-and-monitoring-open-source-tools-and-technologies/#:~:text=Military%20ASW%20employs%20technologies%20such,high%2Dresolution%20satellite%20imagery%20to (accessed on 16 March 2022).
- Ferguson, B.G.; Lo, K.W. Acoustic detection, localization, and tracking of tactical autonomous aerial and underwater vehicles. J. Acoust. Soc. Am. 2016, 140, 3119. [Google Scholar] [CrossRef]
- Dzikowicz, B.; Kost, J.L.; Heddings, J.T.; Brown, D.A. Spiral wave front sonar for active target localization on an unmanned underwater vehicle. J. Acoust. Soc. Am. 2019, 146, 3020. [Google Scholar] [CrossRef]
- Zhu, P.; Isaacs, J.; Fu, B.; Ferrari, S. Deep learning feature extraction for target recognition and classification in underwater sonar images. In Proceedings of the IEEE Conference on Decision and Control (CDC), Melbourne, VIC, Australia, 12–15 December 2017; pp. 2724–2731. [Google Scholar]
- Becker, K. Three-dimensional target motion analysis using angle and frequency measurements. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 284–301. [Google Scholar] [CrossRef]
- Pallayil, V. Ceramic and fibre optic hydrophone as sensors for lightweight arrays—A comparative study. In Proceedings of the OCEANS—Anchorage, Anchorage, AK, USA, 18–21 September 2017; pp. 1–13. [Google Scholar]
- Holmes, J.D.; Carey, W.M.; Lynch, J.F. Results from an autonomous underwater vehicle towed hydrophone array experiment in Nantucket Sound. J. Acoust. Soc. Am. 2006, 120, EL15–EL21. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV Name | Category | Powered by and Sensors Installed | Functionalities | Maximum Payload, Speed, Flight Altitude and Duration |
|---|---|---|---|---|
| Malat Mosquito | Micro/nano, fixed-wing | Battery, camera, EO sensor | Surveillance and reconnaissance | 0.25 kg, 13 m/s, 0.15 km, 1 h |
| Aurora Skate | Micro/nano, fixed-wing | Articulating motor pods, camera, EO/IR sensors | Surveillance and reconnaissance, tracking objects | 0.2 kg, 25 m/s, 4.3 km, 1 h |
| CyberQuad mini | Micro/nano, multi-rotor | Battery, camera, and multiple sensors for detecting gases and pollutants | Urban aerial reconnaissance, detection of gases, industrial and other pollutants | 1.5 kg, 18 m/s, -, 0.67 h |
| RQ-11 Raven | Small/mini, fixed-wing | Battery, camera, infrared sensor, miscellaneous sensors | Surveillance, mapping, imaging and object detection and classification | 0.2 kg, 22.5 m/s, 4.2 km, 1.5 h |
| Matrice-600 | Small/mini, multi-rotor | Battery, camera, intelligent batteries | Imaging and surveillance, high data rate live streaming | 6 kg, 18 m/s, 2.5 km, 0.67 h |
| SkyEye Sierra VTOL | Small/mini, fixed-wing and multi-rotor | Battery/petrol engine, camera, surveying and surveillance equipment, multiple sensors | Imaging, mapping, inspection, and surveillance, and other sensing applications | 3 kg, 30 m/s, 3 km, 5 h |
| Watchkeeper | Medium, fixed-wing | Rotary Wankel engine, camera, EO/IR sensor, motion filter | Imaging, surveillance and reconnaissance | 150 kg, 40 m/s, 4.9 km, 14 h |
| Eagle Eye, Bell HV-911 | Medium, tiltrotor | Turboshaft engine, camera, surveillance sensors, rescue equipment | Search and rescue, surveillance, reconnaissance (mainly at sea) | 90 kg, 103 m/s, 6 km, 5.5 h |
| Skyeye-R4E | Medium, fixed-wing | Twin rotor rotary engine, camera, surveillance and miscellaneous sensors | Imaging, surveillance, pesticide spraying, border patrols | 82 kg, 55 m/s, 4.6 km, 8 h |
| Global Hawk | Large, fixed-wing | Turbofan engine, camera, EO/IR sensors, laser and radar warning receivers, ECM equipment, MTI system | Long endurance and high-altitude and wide area ground/sea surveillance and reconnaissance, communications | 1400 kg, 175 m/s, 18 km, 33 h |
| Zephyr 8 | Large, fixed-wing | Solar-powered, Amprius lithium-ion batteries, communication systems | Airborne communications: as a mobile communication relay | 5 kg, 9.5 m/s, 21.3 km, 26 days |
| Serial # | Current UAV Features and Capabilities | Future UAV Features and Capabilities |
|---|---|---|
| 1 | Multi-rotor or fixed-wing | Hybrid of multi-rotor and fixed-wing, variable wing geometry |
| 2 | Aerial flying | Aerial, over- and underwater, and on-ground maneuvering |
| 3 | Propeller propulsion | Jet engine propulsion in addition to propeller propulsion |
| 4 | Battery and fossil fuel | Solar, synthetic, hydrogen fuel, and battery charging while flying |
| 5 | Small and medium payloads | Large, multi-purpose payloads |
| 6 | Limited maneuverability for fixed-wing UAVs | High maneuverability for fixed-wing UAVs |
| 7 | Cost varies, and dependent on the size of UAV | Reduction in price of different sizes of UAVs |
| 8 | Flight duration dependent on the payload | Long flight duration, and less dependent on the payload |
| 9 | Weather and light affects performance | All weather, day and night high performance |
| 10 | Small to medium RCS | Very small RCS |
| 11 | Limited and vulnerable communication links | Redundant and secured communication links |
| 12 | Semi-autonomous operations | Fully autonomous and AI-controlled options available |
| 13 | Limited ECM capabilities | Enhanced ECM capabilities |
| Current Countermeasures Cgainst UAVs | Future Cirections of Countermeasures against UAVs |
|---|---|
|
|
| Sr. # | UUAV Name | Powered by and Sensors Installed | Dimensions, Endurance and Depth |
|---|---|---|---|
| 1 | MBARI’s Dorado-class | Battery, 200 kHz multibeam sonar, 100 kHz and 410 kHz chirp sidescan sonars | 0.5 m diameter, 6.4 m length, 20 h endurance, 6 km depth |
| 2 | Sentry | Battery, conductivity, temperature and depth sensors, digital camera, reodx potential probe | 1.8 m height, 2.2 m width, 2.9 m length, 24 h endurance, 6 km depth |
| 3 | Qianlong-1 | Battery, camera, obstacle avoidance sonar, side-scan sonar | 0.8 m diameter, 4.6 m length, 24 h endurance, 6 km depth |
| 4 | SeaBED Class | Battery, Imagenex Delta-T imaging sonar, camera | 2 m length, 1.5 m height, 1.2 m width, 24 h endurance, depth 5 km |
| 5 | Urashima (hybrid) | Battery, multi-beam echo sounder, Niskin water sampler, interferometric synthetic aperture sonar, gravimeter system | 1.3 m width, 10 m length, 24 h endurance, depth 3.5 km |
| 6 | Aster x/Idef x | Battery, multi-beam echo sounders, multiple sensors, sub-bottom profilers, spectrometers | 0.7 m diameter, 4.5 m length, 16 h endurance, depth 3 km |
| 7 | BlueROV2 | Battery, gyroscope, accelerometer, magnetometer, pressure/depth and temperature sensor | 457 mm × 338 mm × 254 mm, 4.5 m, 4 h endurance, depth 300 m |
| Serial # | Frequencies | Application |
|---|---|---|
| 1 | 3–30 Hz, ELF band | Underwater communications and pinging |
| 2 | 30–300 Hz, super low frequency (SLF) band | Underwater submarine communications |
| 3 | 300 Hz–3 kHz, ultra low frequency (ULF) band | Underwater communications through dirt and rocks |
| 4 | 3 kHz–30 kHz, very low frequency (VLF) band | Near-sea-surface communications, navigation beacons |
| 5 | 30 kHz–300 kHz, low frequency (LF) band | Near-sea-surface communications, navigation beacons |
| 6 | 3 kHz–30 kHz, VLF band | Near sea surface communications, navigation beacons |
| 7 | Less than 1 kHz, 1 kHz–10 kHz, greater than 10 kHz, and less than 30 kHz | Active sonar operation |
| 8 | 50 kHz, 120 kHz, 200 kHz, and 455 kHz | Sport fishing |
| 9 | 120 kHz, and 200 kHz | Sea floor imaging using deep towed sonar, and swath phase-bathymetric mapping |
| 10 | 100 kHz–1 MHz | Side-scan sonar |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khawaja, W.; Semkin, V.; Ratyal, N.I.; Yaqoob, Q.; Gul, J.; Guvenc, I. Threats from and Countermeasures for Unmanned Aerial and Underwater Vehicles. Sensors 2022, 22, 3896. https://doi.org/10.3390/s22103896
Khawaja W, Semkin V, Ratyal NI, Yaqoob Q, Gul J, Guvenc I. Threats from and Countermeasures for Unmanned Aerial and Underwater Vehicles. Sensors. 2022; 22(10):3896. https://doi.org/10.3390/s22103896
Chicago/Turabian StyleKhawaja, Wahab, Vasilii Semkin, Naeem Iqbal Ratyal, Qasim Yaqoob, Jibran Gul, and Ismail Guvenc. 2022. "Threats from and Countermeasures for Unmanned Aerial and Underwater Vehicles" Sensors 22, no. 10: 3896. https://doi.org/10.3390/s22103896
APA StyleKhawaja, W., Semkin, V., Ratyal, N. I., Yaqoob, Q., Gul, J., & Guvenc, I. (2022). Threats from and Countermeasures for Unmanned Aerial and Underwater Vehicles. Sensors, 22(10), 3896. https://doi.org/10.3390/s22103896