
Prefiltered Single-Carrier Frequency-Domain Equalization for Binary CPM over Shallow Water Acoustic Channel

 , and
, and
Abstract
:1. Introduction
2. System Description
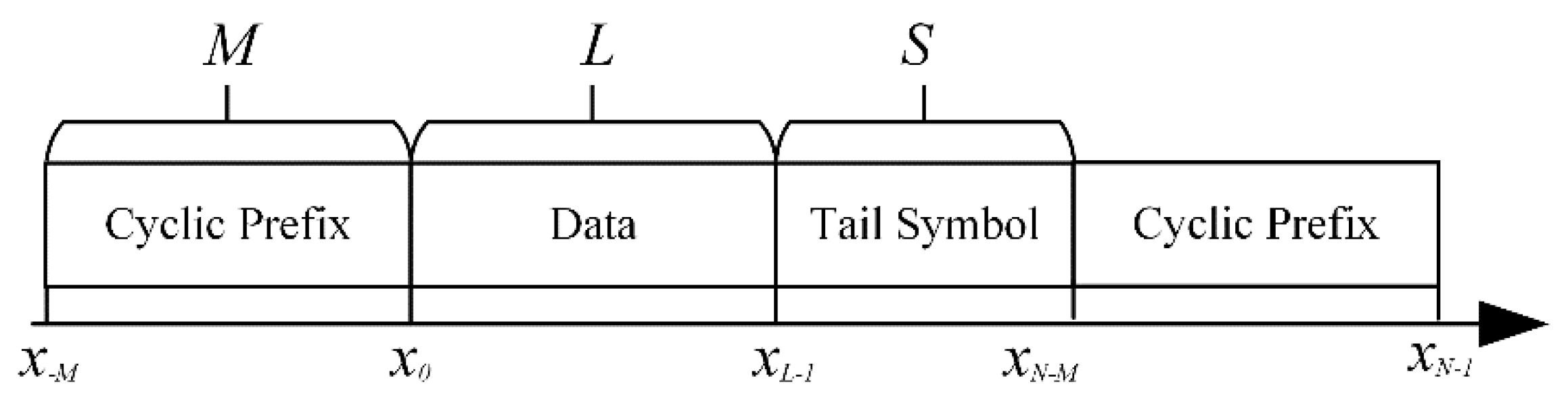
2.1. CPM Signal with Laurent Decomposition
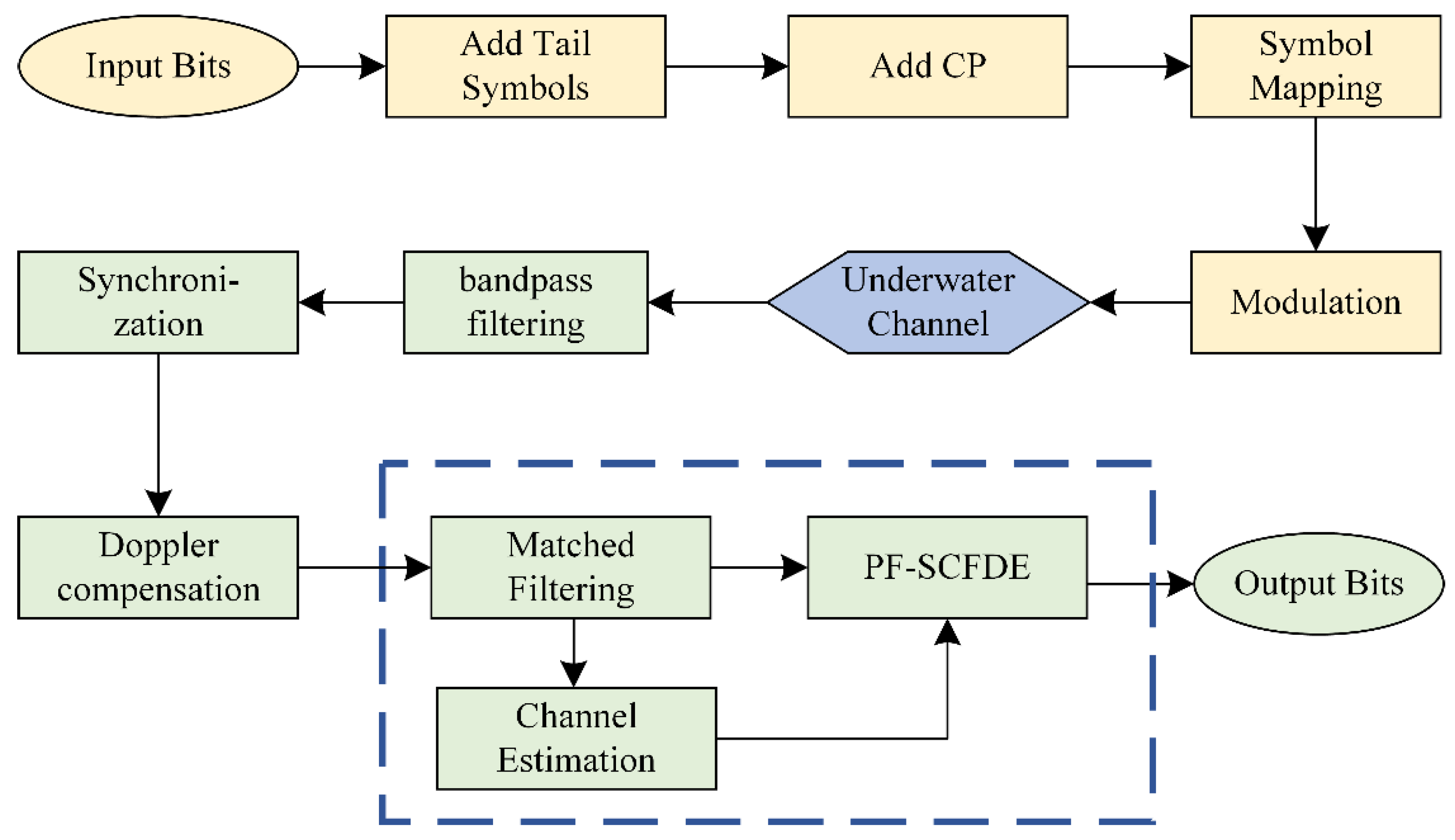
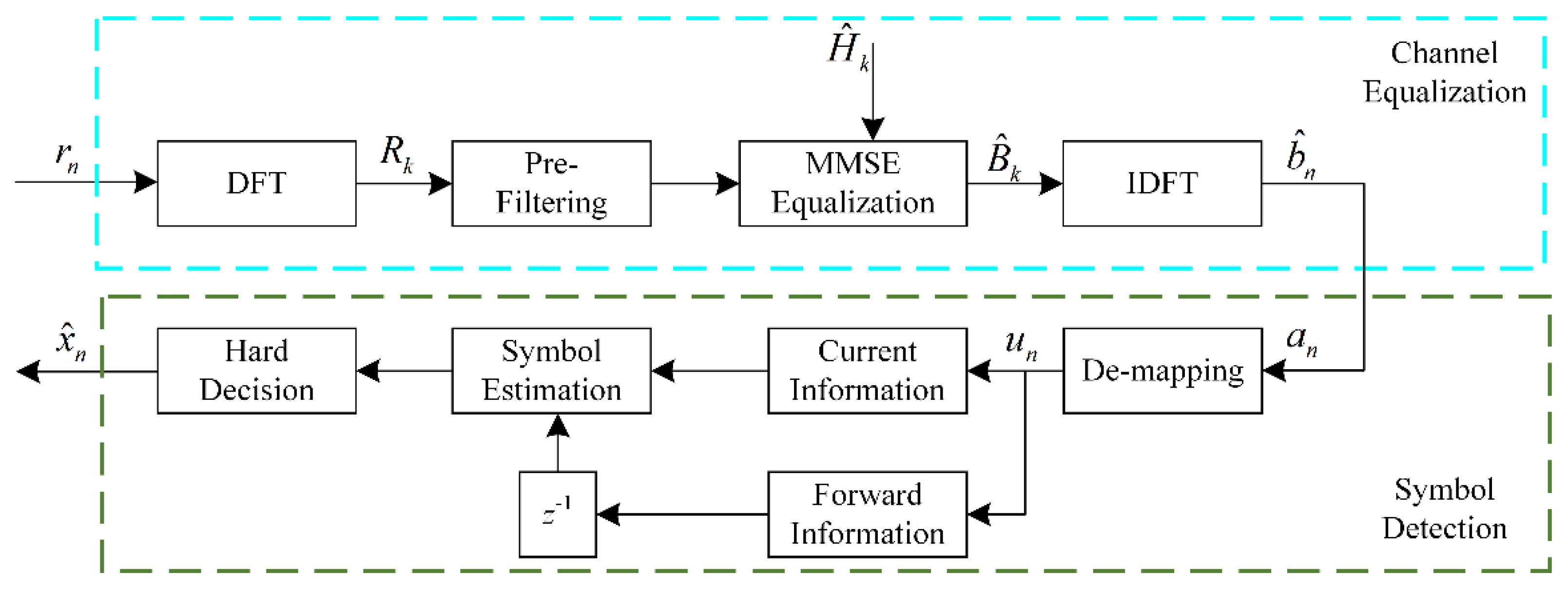
2.2. Transceiver Structure
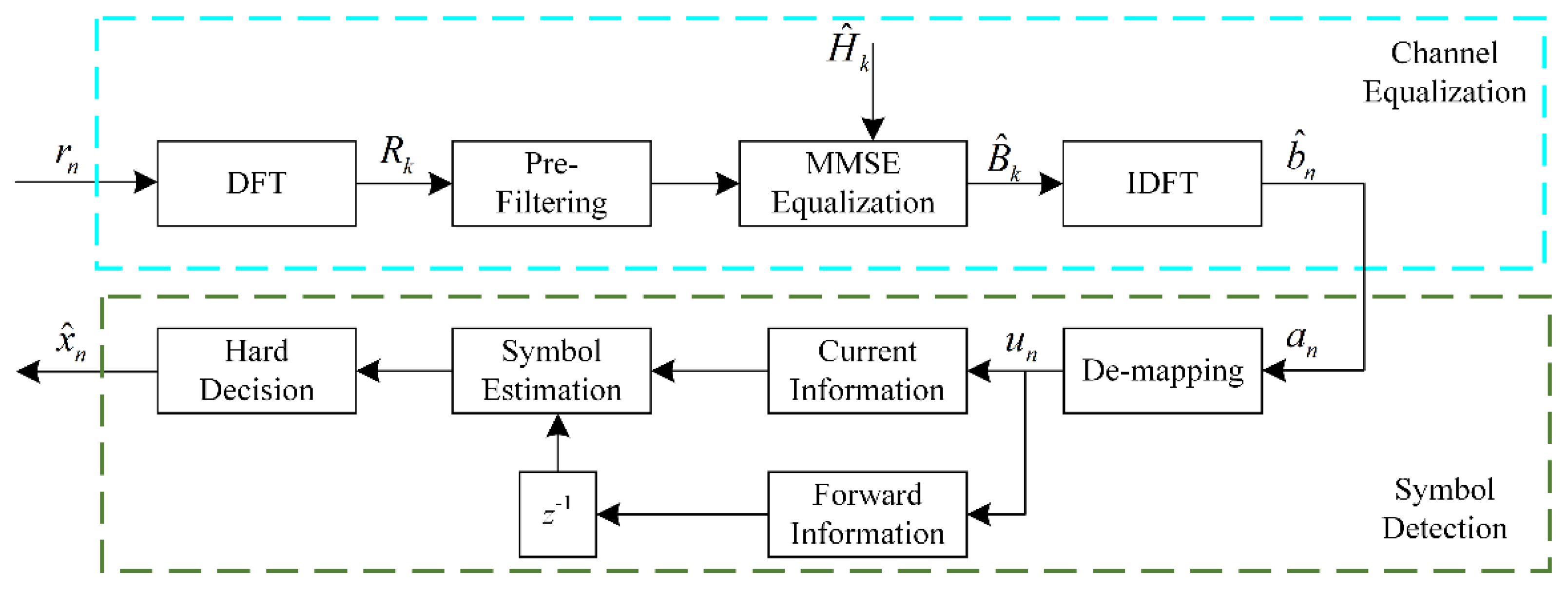
3. Prefiltered Frequency-Domain Equalization
3.1. Channel Equalization
3.2. Symbol Detection
3.3. Complexity Analysis
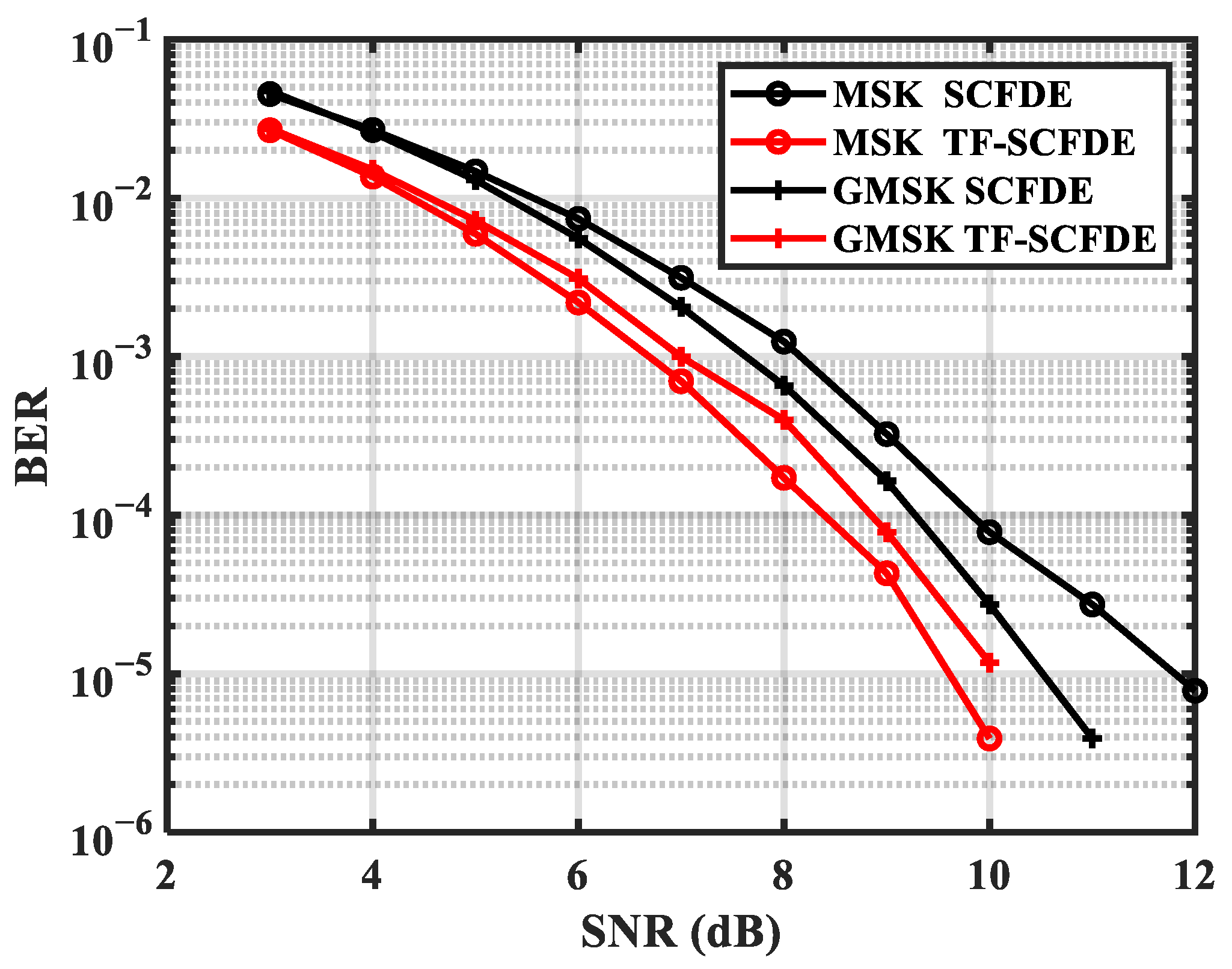
4. Numerical Simulation
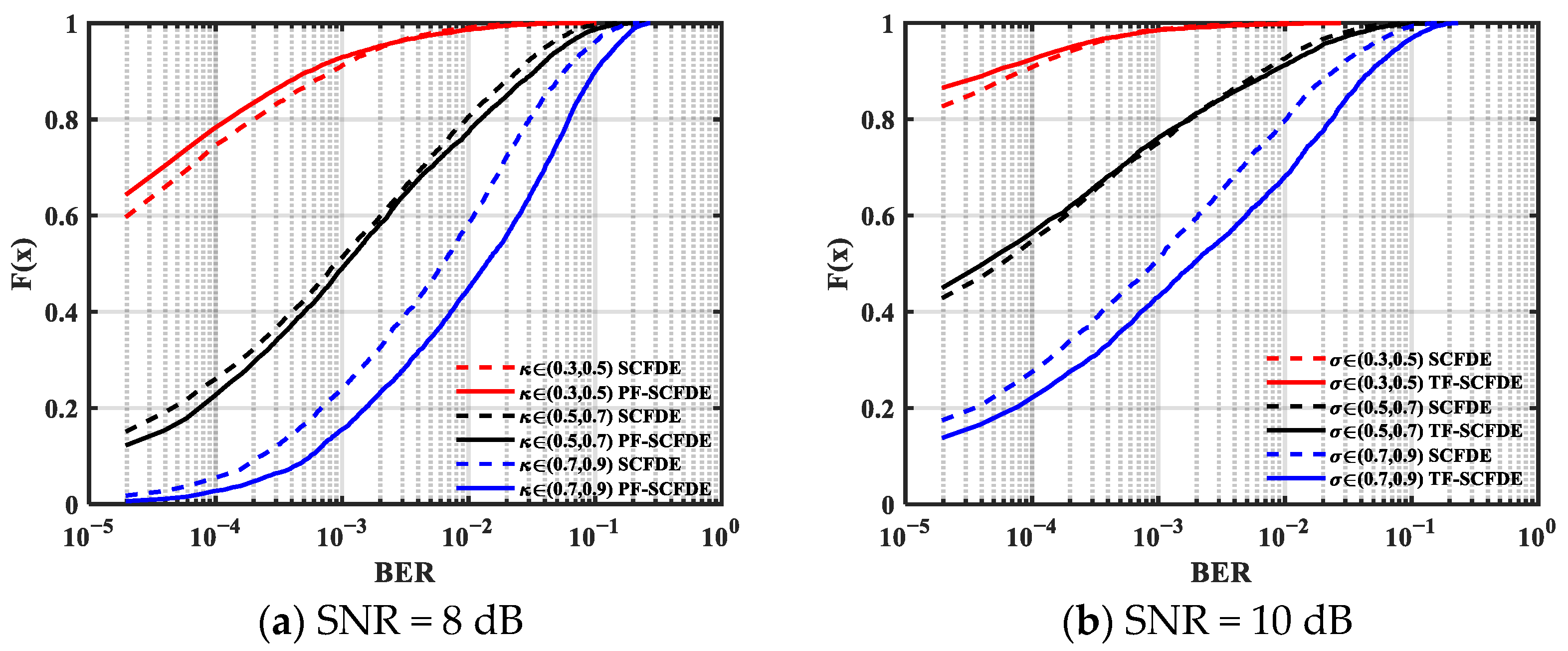
4.1. Rayleigh Fading Channel
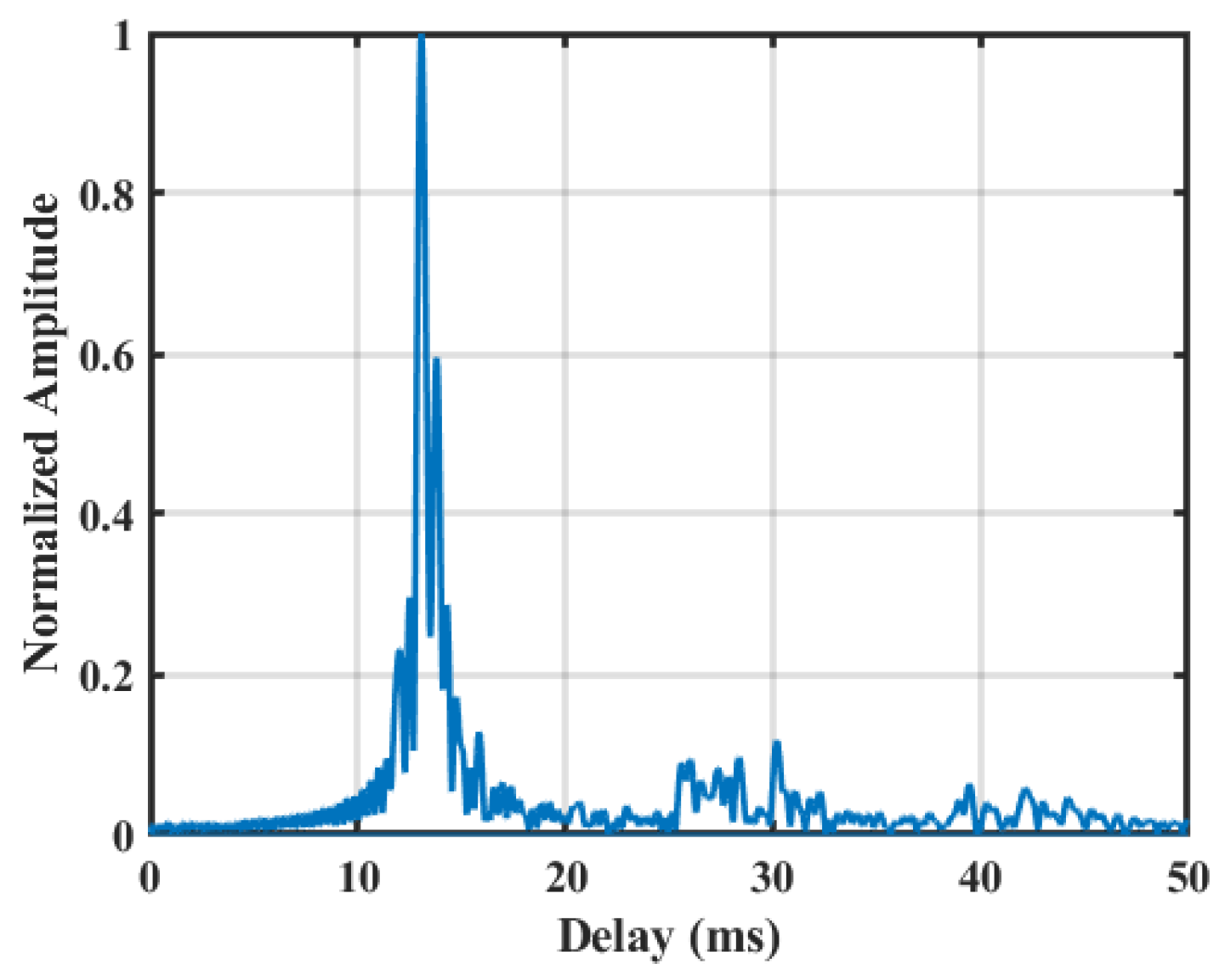
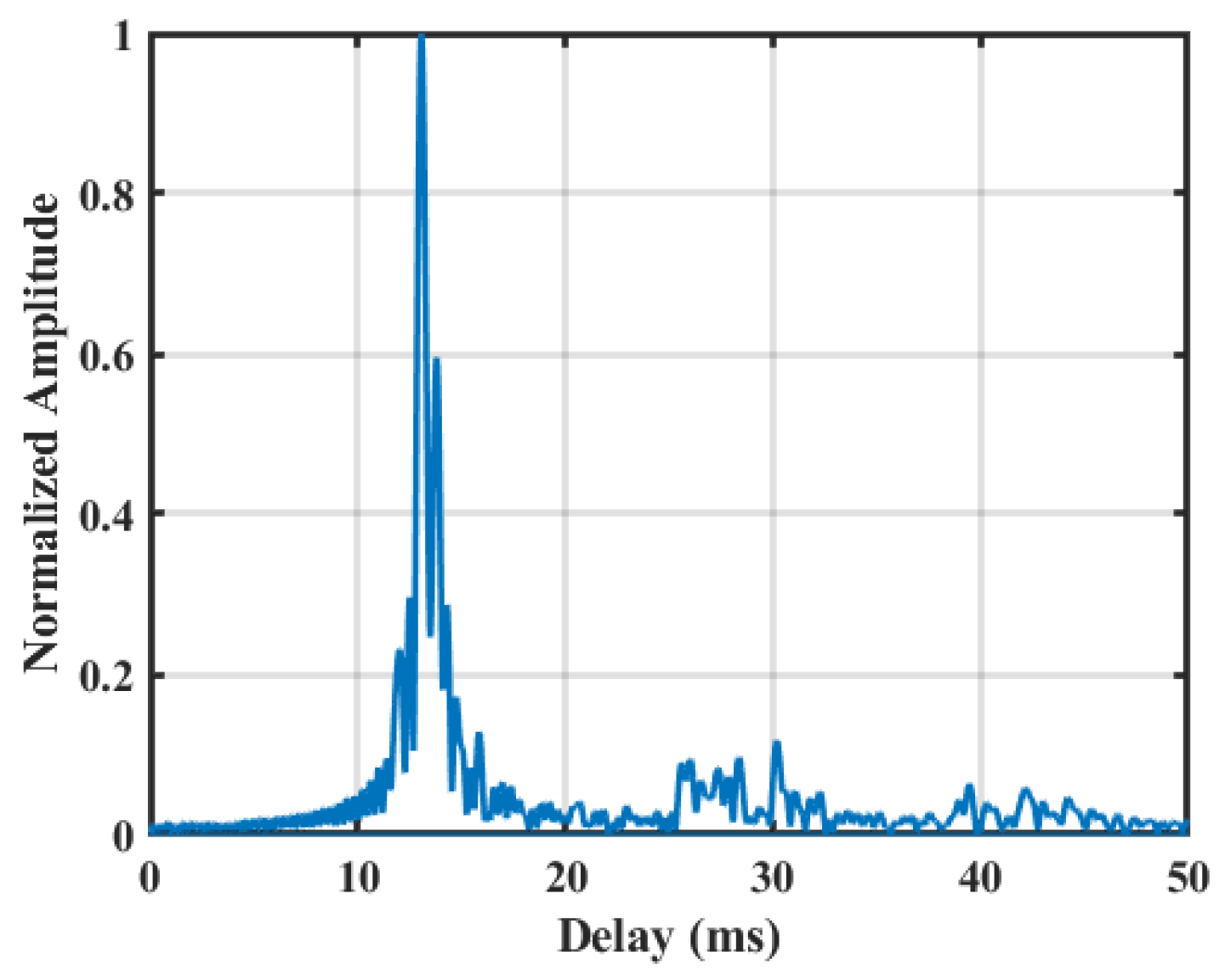
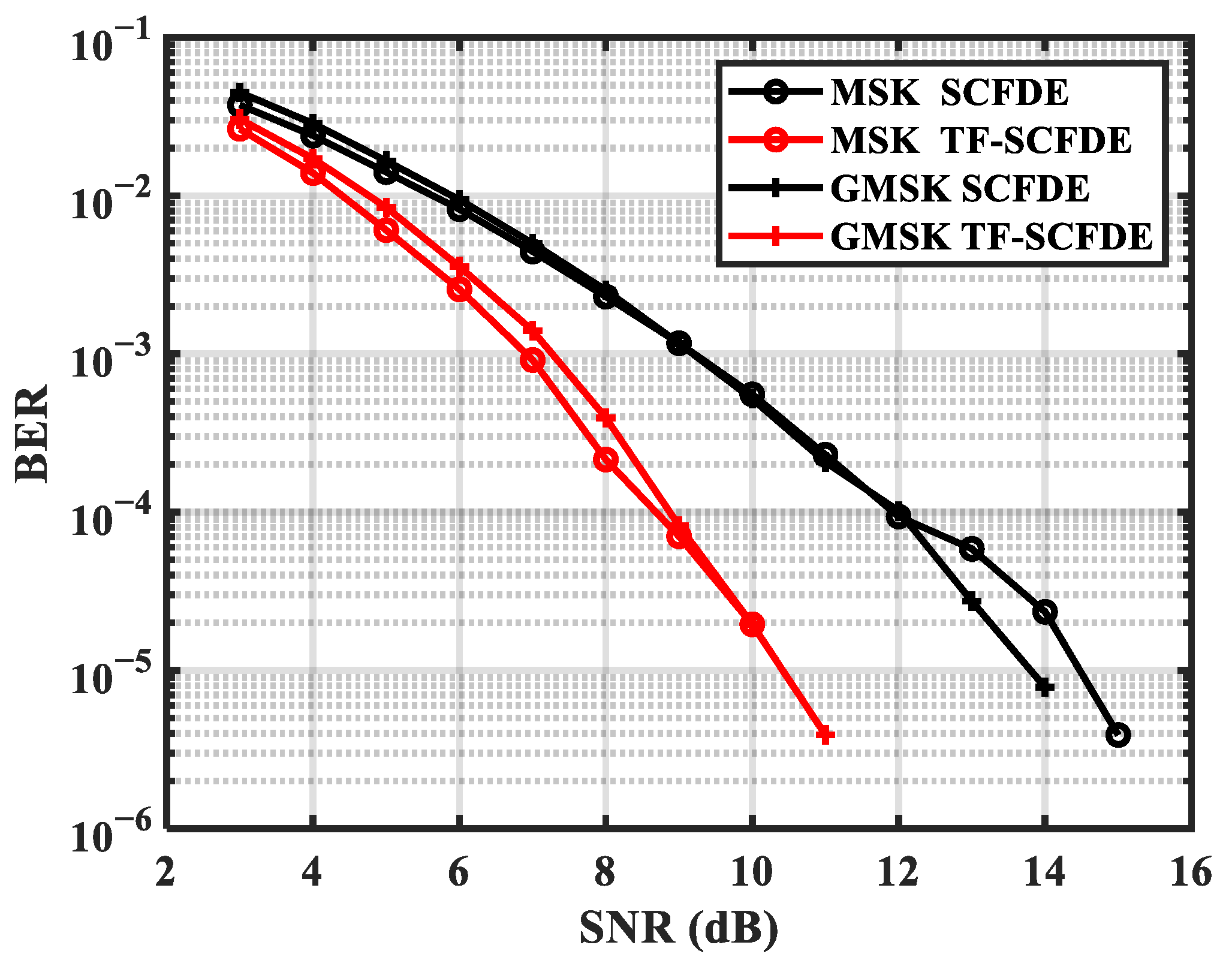
4.2. Typical Channel
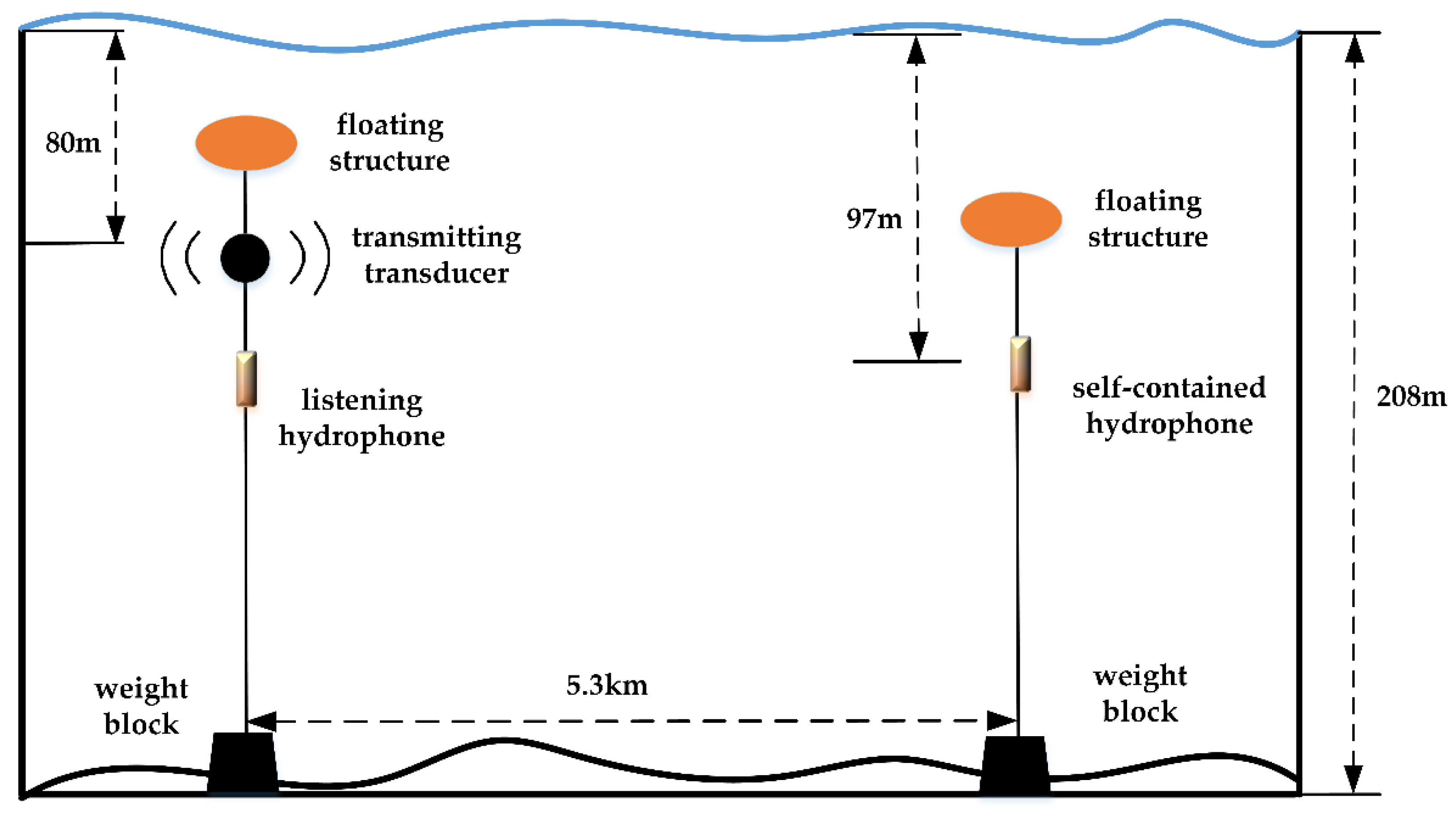
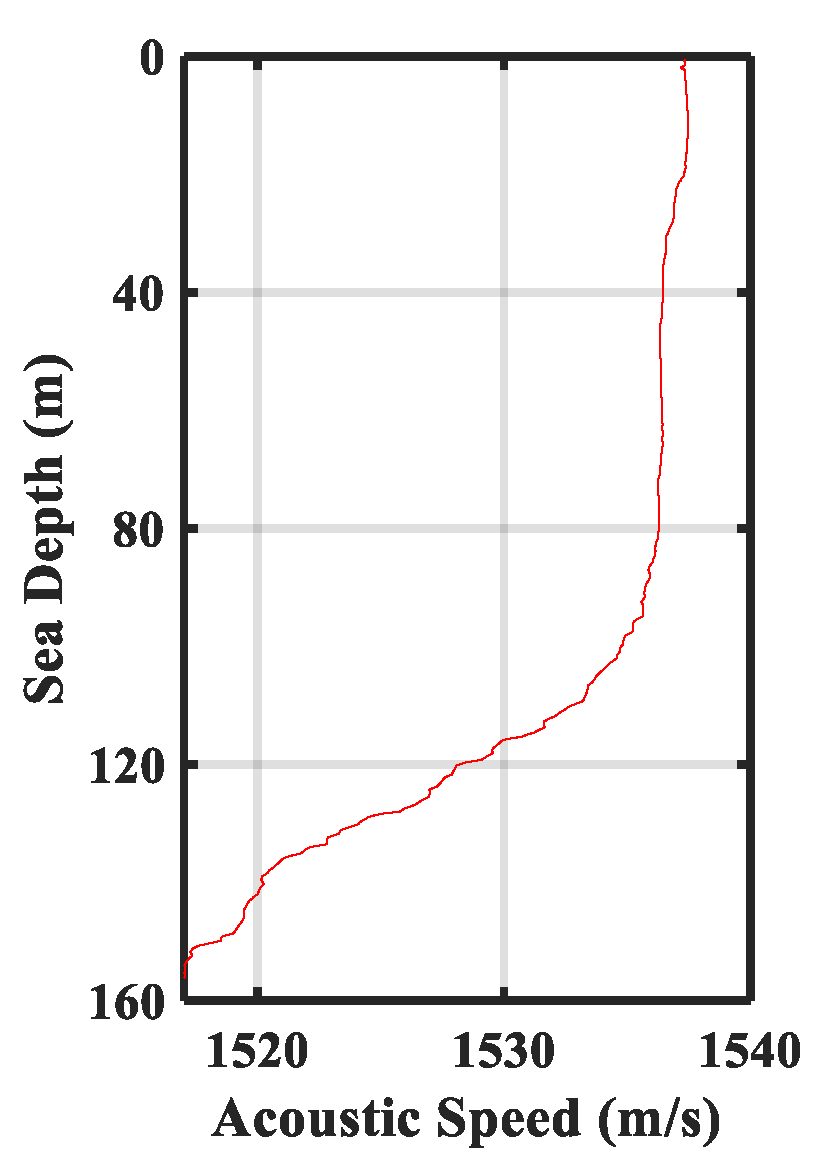
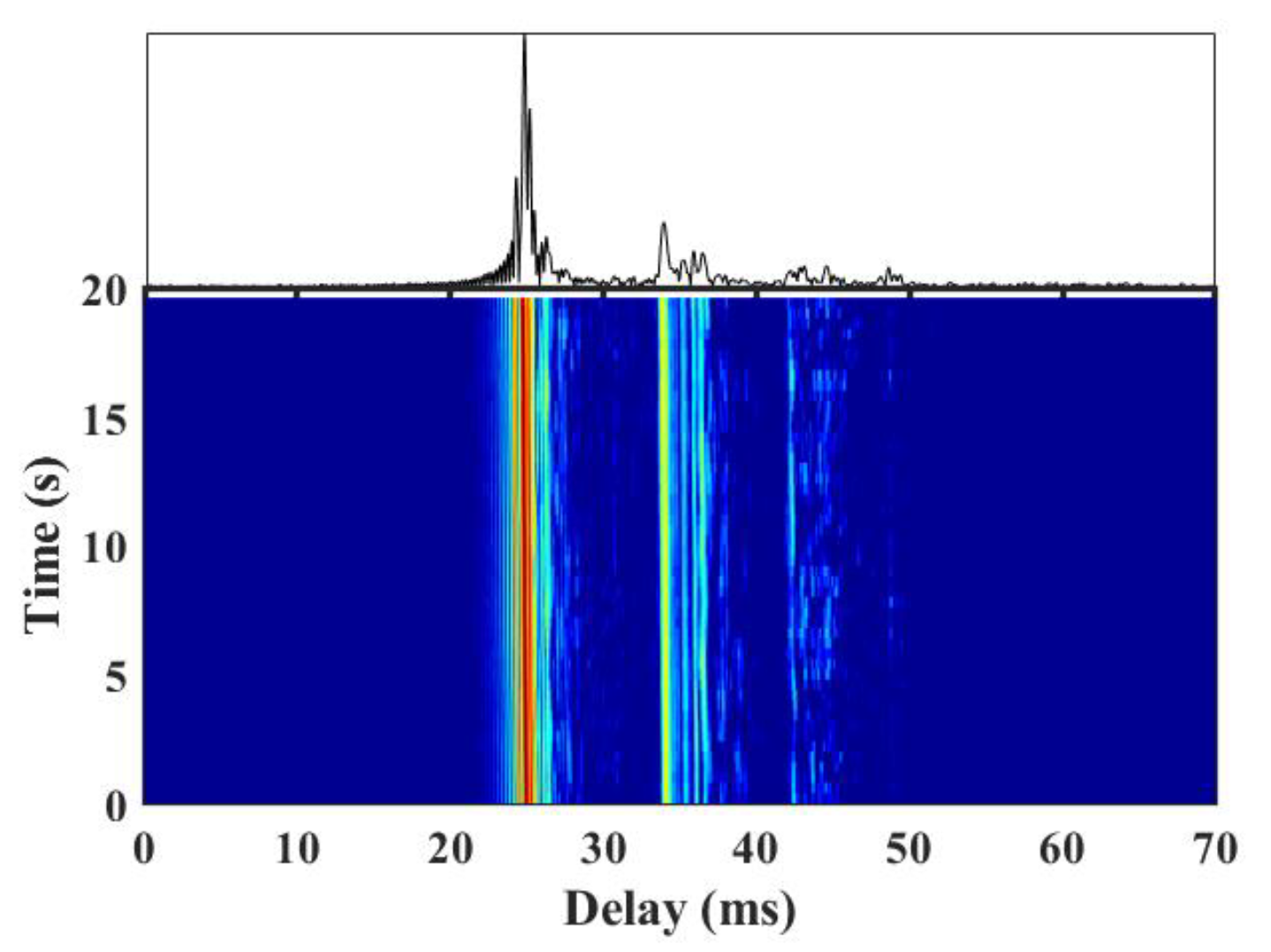
5. Sea Trial
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Qihu, L.I. Advances of research work in UWA. ACTA Acoust. 2001, 26, 295–301. [Google Scholar]
- Min, Z.; Yanbo, W. Development of UWA communication technology. Bull. Chin. Acad. Sci. 2019, 34, 289–296. [Google Scholar]
- Yang, T.C. Properties of UWA communication channels in shallow water. J. Acoust. Soc. Am. 2012, 131, 129–145. [Google Scholar] [CrossRef] [PubMed]
- Aulin, T.; Sundberg, C. Continuous phase modulation- part i: Full response signaling. IEEE Trans. Commun. 1981, 29, 196–209. [Google Scholar] [CrossRef]
- Aulin, T.; Rydbeck, N.; Sundberg, C. Continuous phase modulation-part ii: Partial response signaling. IEEE Trans. Commun. 1981, 29, 210–225. [Google Scholar] [CrossRef]
- El Chamaa, M.E.; Lankl, B. Turbo-estimation for CPM over frequency-selective fast fading channels. IEEE Trans. Commun. 2020, 68, 2538–2550. [Google Scholar] [CrossRef]
- Zang, G.; Huang, B.; Chen, L. Performance analysis of the MSK modulation system over wireless fading channels. In Proceedings of the 2019 IEEE 8th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 24–26 May 2019; pp. 1803–1806. [Google Scholar] [CrossRef]
- Arabian, F.; Rice, M. Polarization combining and equalization for aeronautical mobile telemetry. In Proceedings of the MILCOM 2021-2021 IEEE Military Communications Conference (MILCOM), San Diego, CA, USA, 29 November–2 December 2021; pp. 544–549. [Google Scholar] [CrossRef]
- Darsena, D.; Gelli, G.; Iudice, I.; Verde, F. Equalization techniques of control and non-payload communication links for unmanned aerial vehicles. IEEE Access 2018, 6, 4485–4496. [Google Scholar] [CrossRef]
- Yiin, L.; Stuber, G.L. MLSE and soft-output equalization for trellis-coded continuous phase modulation. In Proceedings of the ICC/SUPERCOMM ’96-International Conference on Communications, Dallas, TX, USA, 23–27 June 1996; pp. 1005–1009. [Google Scholar]
- Duel-Hallen, A.; Heegard, C. Delayed decision-feedback sequence estimation. Trans. Commun. 1989, 37, 428–436. [Google Scholar] [CrossRef] [Green Version]
- Tan, J.; Stuber, G.L. Frequency-domain equalization for continuous phase modulation. IEEE Trans. Wirel. Commun. 2005, 4, 2479–2490. [Google Scholar] [CrossRef]
- Laurent, P. Exact and approximate construction of digital phase modulations by superposition of amplitude modulated pulses (AMP). IEEE Trans. Commun. 1986, 34, 150–160. [Google Scholar] [CrossRef]
- Pancaldi, F.; Vitetta, G.M. Equalization algorithms in the frequency domain for continuous phase modulations. IEEE Trans. Commun. 2006, 54, 648–658. [Google Scholar] [CrossRef]
- Thillo, W.V.; Horlin, F.; Nsenga, J.; Ramon, V.; Bourdoux, A.; Lauwereins, R. Low complexity linear frequency domain equalization for continuous phase modulation. IEEE Trans. Wirel. Commun. 2009, 8, 1435–1445. [Google Scholar] [CrossRef] [Green Version]
- Williams, E.; Saquib, M. Linear frequency domain equalization of SOQPSK-TG for wideband aeronautical telemetry channels. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 640–647. [Google Scholar] [CrossRef]
- Thillo, W.V.; Ramon, V.; Bourdoux, A.; Horlin, F.; Sleurs, K.; Lauwereins, R. Training sequence versus cyclic prefix for CPM with frequency domain equalization. In Proceedings of the GLOBECOM 2009-2009 IEEE Global Telecommunications Conference, Honolulu, HI, USA, 30 November–4 December 2009; pp. 1–5. [Google Scholar] [CrossRef]
- Brown, C.; Vigneron, P.J. Channel estimation and equalisation for single carrier continuous phase modulation. In Proceedings of the 2011-MILCOM 2011 Military Communications Conference, Baltimore, MD, USA, 7–10 November 2011; pp. 334–340. [Google Scholar] [CrossRef]
- Chayot, R.; Thomas, N.; Poulliat, C.; Boucheret, M.; Wambeke, N.V.; Lesthievent, G. Channel estimation and equalization for CPM with application for aeronautical communications via a satellite link. In Proceedings of the MILCOM 2017-2017 IEEE Military Communications Conference (MILCOM), Baltimore, MD, USA, 23–25 October 2017; pp. 888–893. [Google Scholar] [CrossRef]
- Weber, R.; Waldhorst, A.; Schulz, F.; Bohme, J.F. Blind receivers for MSK signals transmitted through shallow water. In Proceedings of the MTS/IEEE Oceans 2001. An Ocean Odyssey. Conference Proceedings (IEEE Cat. No.01CH37295), Honolulu, HI, USA, 5–8 November 2001; pp. 2183–2190. [Google Scholar] [CrossRef]
- Vadde, V.; Lalapura, V.S.; Yashaswini, P. GMSK modulation for reverberation limited underwater acoustic time reversal mirror based communication. In Proceedings of the 2011 International Symposium on Ocean Electronics, Kochi, India, 16–18 November 2011; pp. 235–240. [Google Scholar] [CrossRef]
- Liu, S.; Ma, T.; Gang, Q.; Kuang, B. Bionic communication by dolphin whistle with continuous-phase based on MSK modulation. In Proceedings of the 2016 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Hong Kong, China, 5–8 August 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Darsena, D.; Gelli, G.; Verde, F.; Iudice, I. LTV equalization of CPM signals over doubly-selective aeronautical channels. In Proceedings of the 2016 IEEE Metrology for Aerospace (MetroAeroSpace), Florence, Italy, 22–23 June 2016; pp. 75–80. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Jia, N.; Huang, J.C.; Guo, S.M.; Xiao, D.; Ma, L. Autoregressive model of an underwater acoustic channel in the frequency domain. Appl. Acoust. 2022, 185, 108397. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equalizer Type | Complex Multiplication | Complex Addition |
|---|---|---|
| SCFDE | 2 N log2(N)+10 N | 2 N log2(N)+N |
| PF-SCFDE | 2 N log2(N)+11 N+M | 2 N log2(N)+2 N+M |
| Delay (Symbol Interval) | 0 | 1 | 2 | 8 | 12 | 25 |
|---|---|---|---|---|---|---|
| Power Fraction | 0.189 | 0.379 | 0.255 | 0.090 | 0.055 | 0.032 |
| SNR (dB) | Number of Frames | Error Bit of SCFDE | Error Bit of PF-SCFDE |
|---|---|---|---|
| 5–10 | 22 | 212 | 179 |
| 10–15 | 52 | 58 | 42 |
| 15–20 | 72 | 8 | 6 |
| >20 | 64 | 0 | 0 |
| Total | 210 | 278 | 227 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, R.; Jia, N.; Guo, Z.; Huang, J.; Xiao, D.; Guo, S. Prefiltered Single-Carrier Frequency-Domain Equalization for Binary CPM over Shallow Water Acoustic Channel. Sensors 2022, 22, 3821. https://doi.org/10.3390/s22103821
Han R, Jia N, Guo Z, Huang J, Xiao D, Guo S. Prefiltered Single-Carrier Frequency-Domain Equalization for Binary CPM over Shallow Water Acoustic Channel. Sensors. 2022; 22(10):3821. https://doi.org/10.3390/s22103821
Chicago/Turabian StyleHan, Ruigang, Ning Jia, Zhongyuan Guo, Jianchun Huang, Dong Xiao, and Shengming Guo. 2022. "Prefiltered Single-Carrier Frequency-Domain Equalization for Binary CPM over Shallow Water Acoustic Channel" Sensors 22, no. 10: 3821. https://doi.org/10.3390/s22103821
APA StyleHan, R., Jia, N., Guo, Z., Huang, J., Xiao, D., & Guo, S. (2022). Prefiltered Single-Carrier Frequency-Domain Equalization for Binary CPM over Shallow Water Acoustic Channel. Sensors, 22(10), 3821. https://doi.org/10.3390/s22103821