
Label GM-PHD Filter Based on Threshold Separation Clustering


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. PHD Filtering
2.1. PHD Recursion
2.2. Gaussian Mixture Implementation
2.3. Label GM-PHD Filter
3. Robust Label GM-PHD Filter
3.1. Improve Pruning and Merging Methods
- 1.
- For , the truncation threshold , the merging threshold and the maximum number of Gaussian terms
- 2.
- Set the set
- 3.
- Find the index value of the maximum weight value in set A
- 4.
- Weighted summation to obtain Gaussian component parameters
- 5.
- Put component parameter into the output
3.2. Threshold Separation Clustering
3.3. Tracking Correlation to Form a Track
3.4. Overall Steps to Improve the Algorithm
4. Simulation and Experimental Results
4.1. Experimental Parameter Setting
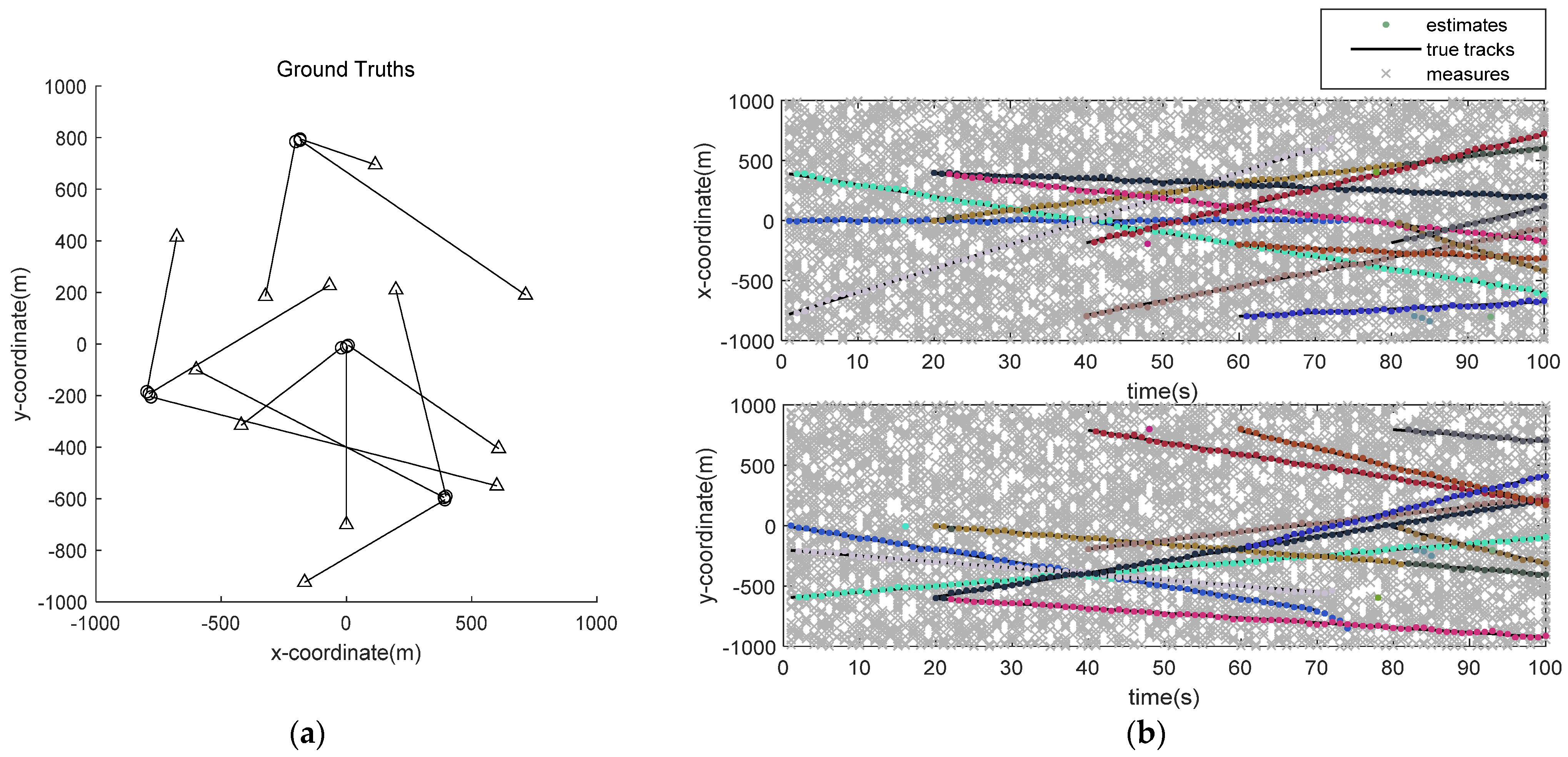
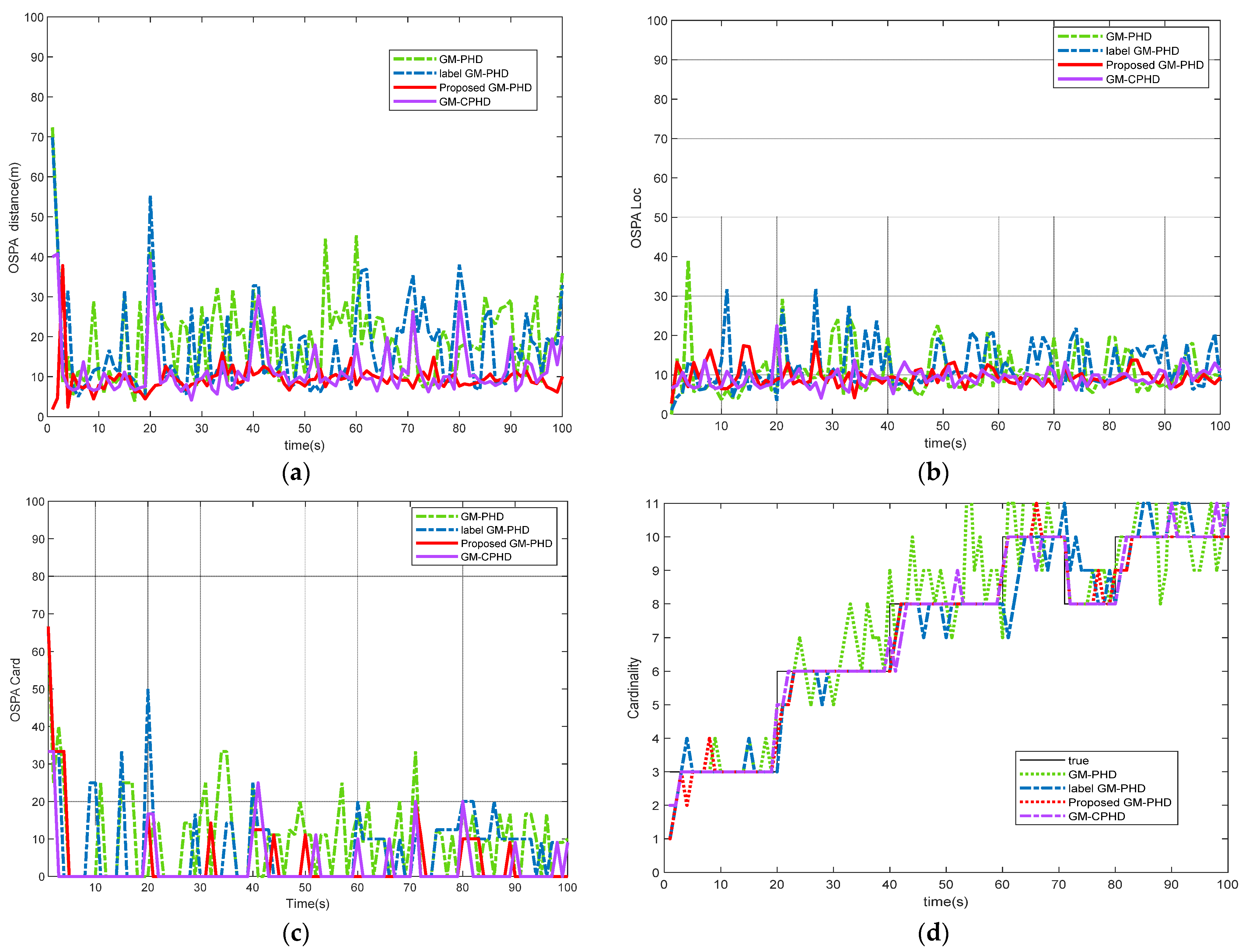
4.2. Simulation Scenario 1
4.2.1. Filter Quality Analysis
4.2.2. Computational Complexity Analysis
4.3. Simulation Scenario 2
4.4. Simulation Scenario 3
4.5. Simulation Scenario 4
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Reid, D. An Algorithm for Tracking Multiple Targets. IEEE Trans. Autom. Control. 1979, 24, 1202–1211. [Google Scholar] [CrossRef]
- Daum, F. Multitarget-Multisensor Tracking: Principles and Techniques. IEEE Aerosp. Electron. Syst. Mag. 1996, 11, 41–53. [Google Scholar] [CrossRef]
- Mahler, R. Multitarget Bayes filtering via first-order multitarget moments. IEEE Trans. Aerosp. Electron. Syst. 2004, 39, 1152–1178. [Google Scholar] [CrossRef]
- Hu, Q.; Ji, H.; Zhang, Y. A standard PHD filter for joint tracking and classification of maneuvering extended targets using random matrix. Signal Process. 2017, 144, 352–363. [Google Scholar] [CrossRef]
- Leonard, M.R.; Zoubir, A.M. Multi-target tracking in distributed sensor networks using particle PHD filters. Signal Process. 2019, 159, 130–146. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Ji, L.; Yang, F.; Qu, X.; Yang, Z.; Qin, D. Cubature Information Gaussian Mixture Probability Hypothesis Density Approach for Multi Extended Target Tracking. IEEE Access 2019, 7, 103678–103692. [Google Scholar] [CrossRef]
- Feng, P.; Wang, W.; Dlay, S.; Naqvi, S.M.; Chambers, J. Social Force Model-Based MCMC-OCSVM Particle PHD Filter for Multiple Human Tracking. IEEE Trans. Multimed. 2016, 19, 725–739. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Granström, K.; Gao, L.; Battistelli, G.; Kim, S.; Wymeersch, H. Joint CKF-PHD Filter and Map Fusion for 5GMulti-cell SLAM. In Proceedings of the IEEE International Conference on Communications(ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Jiang, Q.; Wang, R.; Zhou, C. Modified Bayesian Group Target Track Initiation Algorithm Based on Algebraic Graph Theory. J. Electron. Inf. Technol. 2021, 43, 531–538. [Google Scholar]
- Bar-Shalom, Y. Tracking and Data Association; Academic Press: San Diego, CA, USA, 1988. [Google Scholar]
- Bar-Shalom, Y.; Kirubarajan, T.; Lin, X. Probabilistic dataassociation techniques for target tracking with applicationsto sonar, radar and EO sensors. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 37–56. [Google Scholar] [CrossRef]
- Musicki, D.; Evans, R. Joint integrated probabilistic dataassociation: JIPDA. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 1093–1099. [Google Scholar] [CrossRef]
- Blackman, S.S. Multiple hypothesis tracking for multipletarget tracking. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 5–18. [Google Scholar] [CrossRef]
- Panta, K.; Clark, D.E.; Vo, B.N. Data Association and Track Management for the Gaussian Mixture Probability Hypothesis Density Filter. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1003–1016. [Google Scholar] [CrossRef] [Green Version]
- Vo, B.N.; Singh, S.; Doucet, A. Sequential Monte Carlo methods for multi-target filteringwith random finite sets. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1224–1245. [Google Scholar]
- Drovandi, C.C.; McGree, J.; Pettitt, A.N. A sequential Monte Carlo algorithm to incorporate model uncertainty in Bayesian sequential design. J. Comput. Graph. Stat. 2014, 23, 3–24. [Google Scholar] [CrossRef] [Green Version]
- Urteaga, I.; Bugallo, M.F.; Djuric, P.M. Sequential Monte Carlo methods under model uncertainty. In Proceedings of the IEEE Statistical Signal Processing Workshop (SSP), Palma de Mallorca, Spain, 26–29 June 2016; p. 15. [Google Scholar]
- Martino, L.; Read, J.; Elvira, V.; Louzada, F. Cooperative Parallel Particle Filters for on-Line Model Selection and Applications to Urban Mobility. Digit. Signal Process. 2017, 60, 172–185. [Google Scholar] [CrossRef] [Green Version]
- Xi, S.; Feng, Y.; Yan, L.; Quan, P. Improvedprobability hypothesis density filter with lowdetection probability. Command. Inf. Syst. Technol. 2014, 5, 36–40. [Google Scholar]
- Liu, Z.X.; Xie, W.X.; Wang, P.; Yu, Y. A Gaussian mixture PHD filter with the capability of information hold. Acta Electron. Sin. 2013, 41, 1603–1608. [Google Scholar]
- Yazdian-Dehkordi, M.; Azimifar, Z. Refined GM-PHD tracker for tracking targetsin possible subsequent missed detections. Signal Process. 2015, 116, 112–126. [Google Scholar] [CrossRef]
- Clark, D.E.; Bell, J. Data association for the PHD filter. In Proceedings of the 2005 International Conference on Intelligent Sensors, Melbourne, VIC, Australia, 5–8 December 2005; pp. 217–222. [Google Scholar]
- Zhou, X.; Tang, Y.; Yang, J.; Xie, Z.; Chen, S. Penalized Gaussian mixture probability hy-pothesis density tracker with multi-feature fusion. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics, Bali, Indonesia, 5–10 December 2014; pp. 1415–1420. [Google Scholar]
- Wang, Y.; Jing, Z.; Hu, S. Data association for PHD filter based on MHT. In Proceedings of the 2008 11th International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008; pp. 1–8. [Google Scholar]
- Panta, K.; Vo, B.N.; Singh, S. Novel data association schemes for the probability hypothesis density filter. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 556–570. [Google Scholar] [CrossRef]
- Reuter, S.; Vo, B.T.; Vo, B.N.; Dietmayer, K. The labeled multi-Bernoulli filter. IEEE Trans. Signal Process. 2014, 62, 3246–3260. [Google Scholar]
- Vo, B.T.; Vo, B.N. Labeled random finite sets and multi-object conjugate priors. IEEE Trans. Signal Process. 2013, 61, 3460–3475. [Google Scholar] [CrossRef]
- Vo, B.N.; Vo, B.T.; Phung, D. Labeled random finite sets and the Bayes multi-target tracking filter. IEEE Trans. Signal Process. 2014, 62, 6554–6567. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Yang, J.; Ge, H.; Yang, L. An improved GM-PHD tracker with track management for multiple target tracking. In Proceedings of the 2015 International Conference on Control, Automation and Information Sciences (ICCAIS), Changshu, China, 29–31 October 2015; pp. 185–190. [Google Scholar]
- Yang, F.; Su, Y.; Zhang, W.; Yao, X. A track extraction method based on target topology for PHD filter. In Proceedings of the 2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC), Wuhan, China, 11–13 November 2016; pp. 449–453. [Google Scholar]
- Yang, F.; Wang, Y.; Liang, Y.; Pan, Q. Overview of multi-target tracking technology based on probability hypothesis density filtering method. Acta Autom. Sin. 2013, 39, 1944–1956. [Google Scholar] [CrossRef]
- Luo, Q.; Gao, Z.; Xie, C. Improved GM-PHD filter based on threshold separation clusterer for space-based starry-sky background weak point target tracking. Digit. Signal Process. 2020, 103, 102766. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Zhang, Q.; Hu, X. Label GM-PHD Filter Based on Threshold Separation Clustering. Sensors 2022, 22, 70. https://doi.org/10.3390/s22010070
Wang K, Zhang Q, Hu X. Label GM-PHD Filter Based on Threshold Separation Clustering. Sensors. 2022; 22(1):70. https://doi.org/10.3390/s22010070
Chicago/Turabian StyleWang, Kuiwu, Qin Zhang, and Xiaolong Hu. 2022. "Label GM-PHD Filter Based on Threshold Separation Clustering" Sensors 22, no. 1: 70. https://doi.org/10.3390/s22010070
APA StyleWang, K., Zhang, Q., & Hu, X. (2022). Label GM-PHD Filter Based on Threshold Separation Clustering. Sensors, 22(1), 70. https://doi.org/10.3390/s22010070