
Multistage Centrifugal Pump Fault Diagnosis Using Informative Ratio Principal Component Analysis





Abstract
:1. Introduction
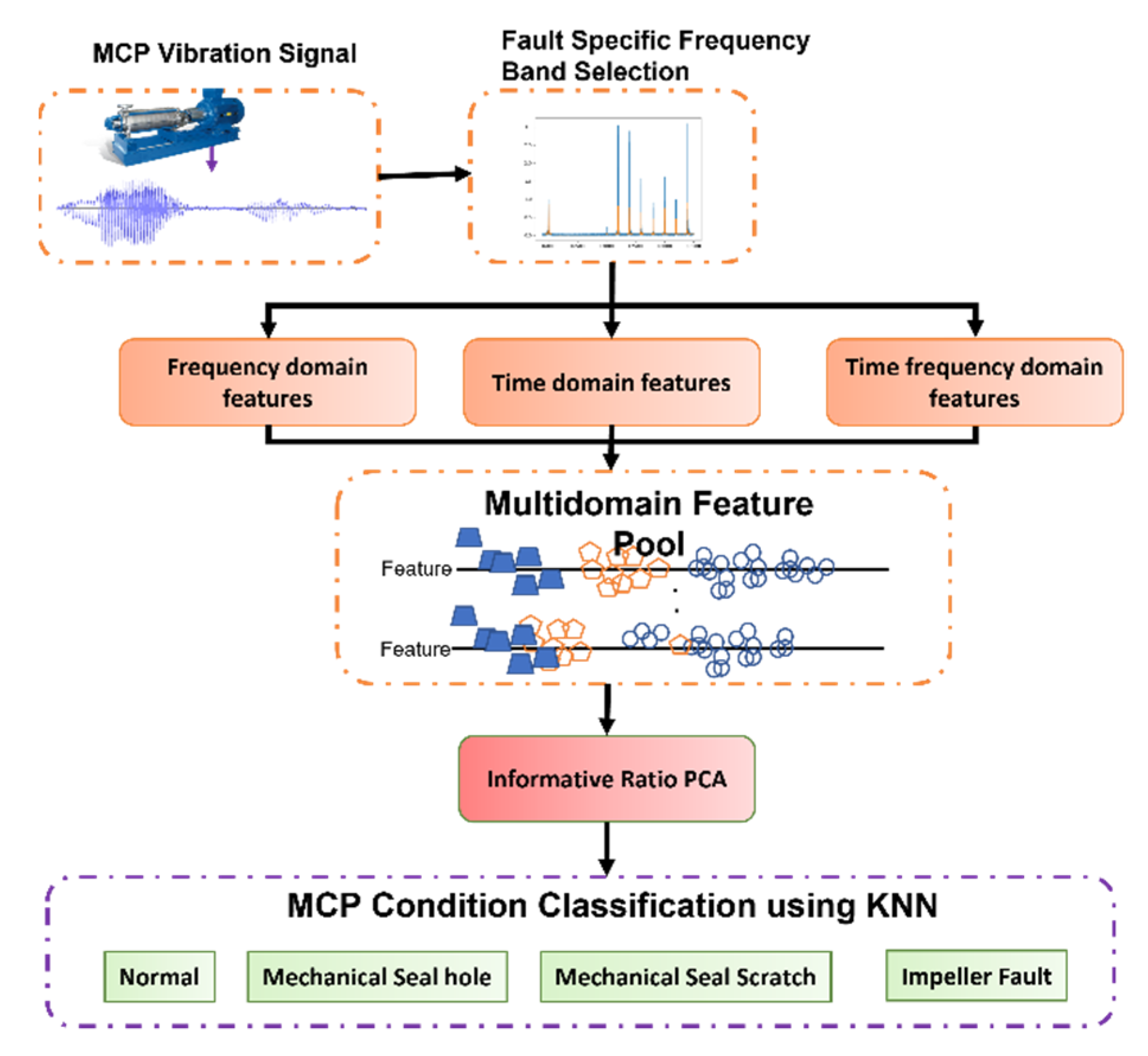
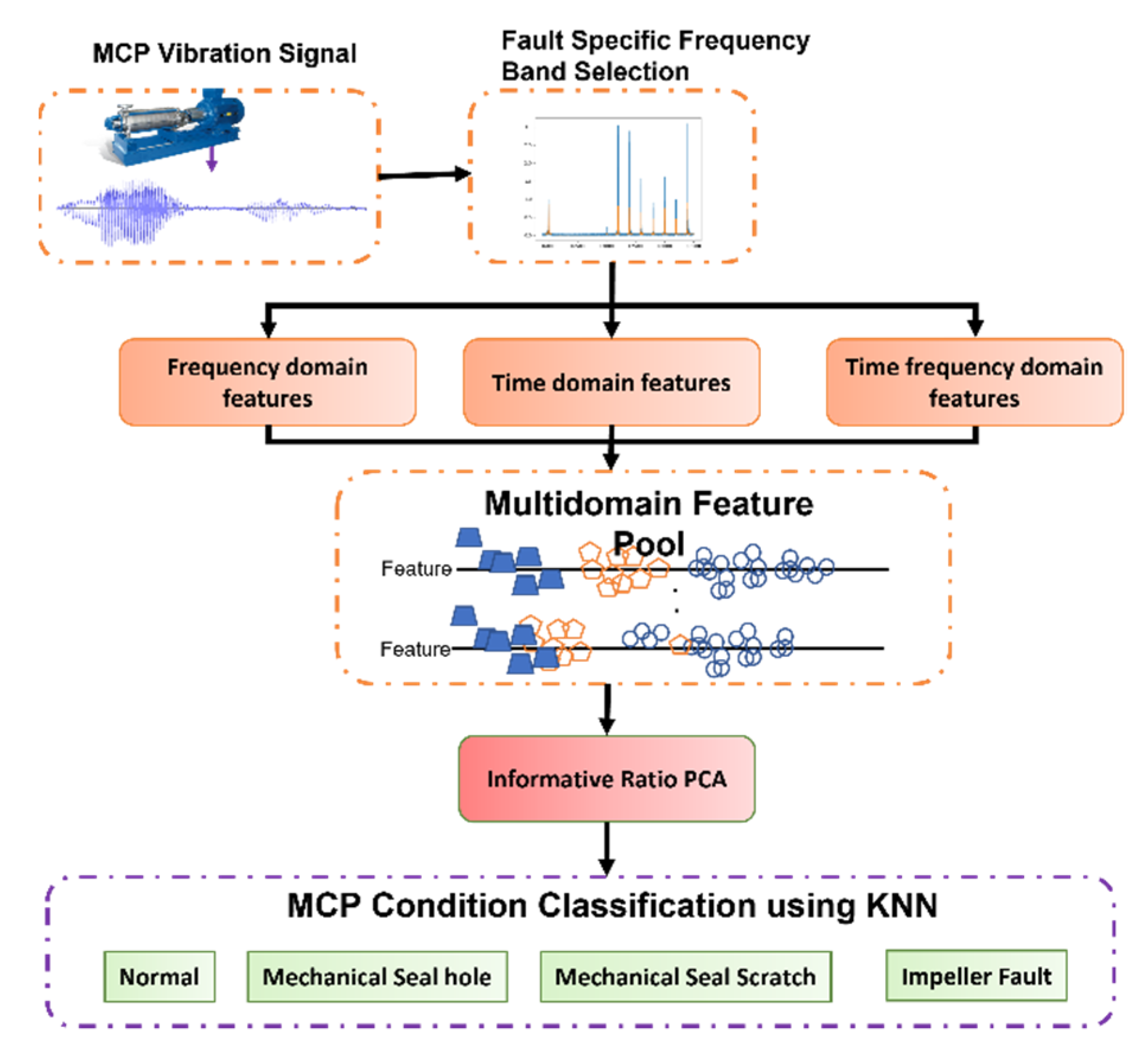
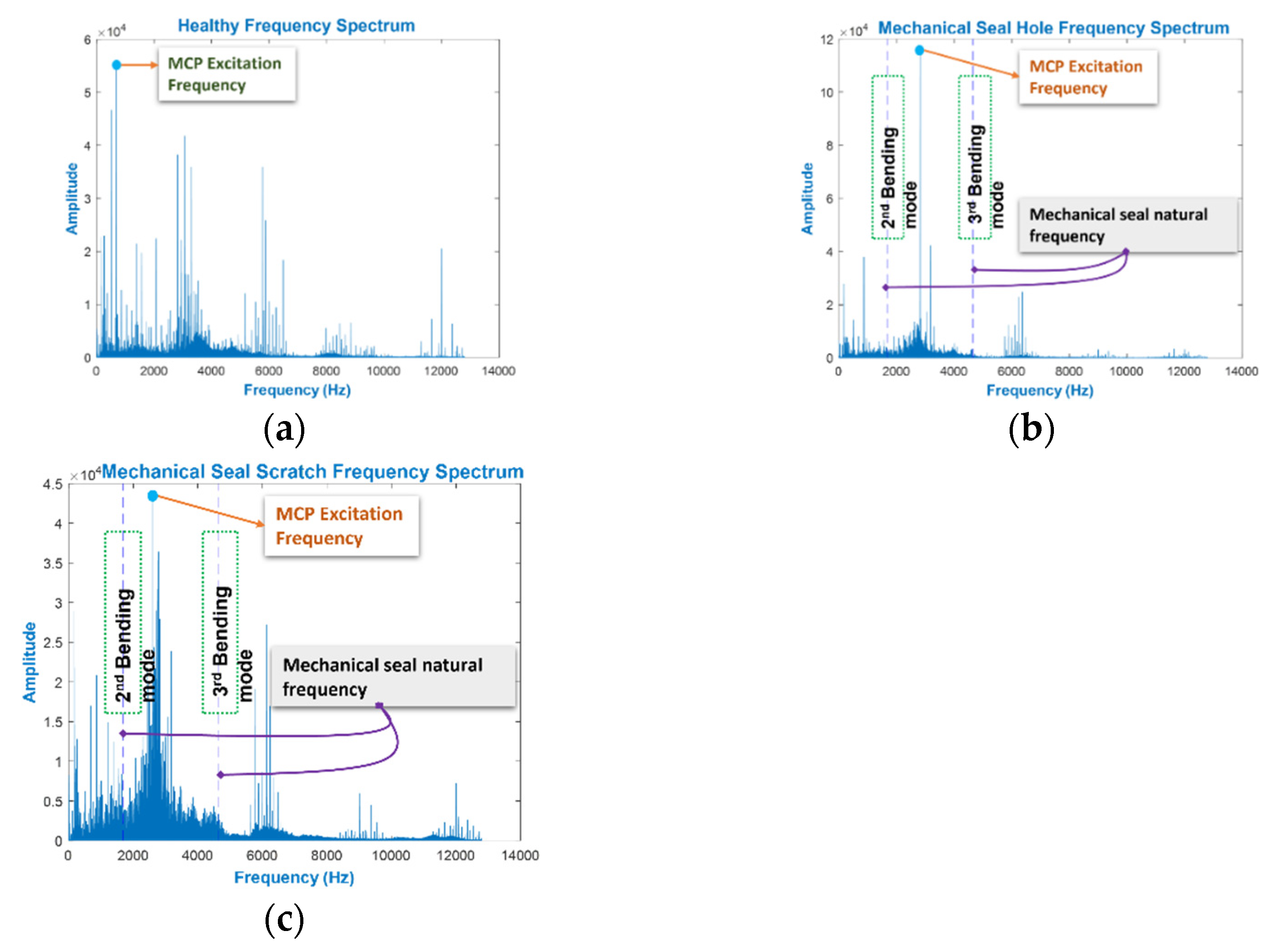
- To overcome the macrostructural interference noises, this paper first calculates the vibration modes for MCP defects. These MCP defect modes of vibration are filtered from the MCP vibration spectrum. The filtered mode of vibration forms the FSFB, which is used for discriminant SF extraction in time, frequency, and TFD. All of these SF were combined into a single feature victor called MDFP.
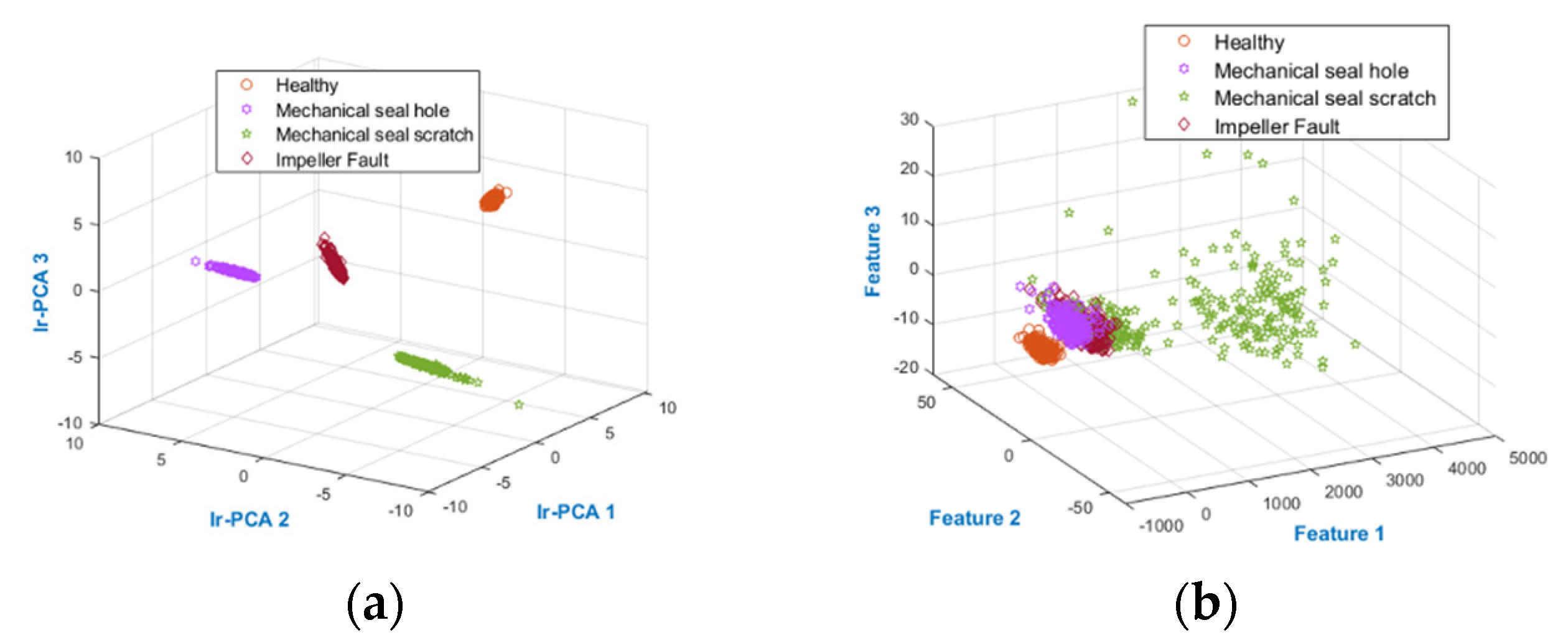
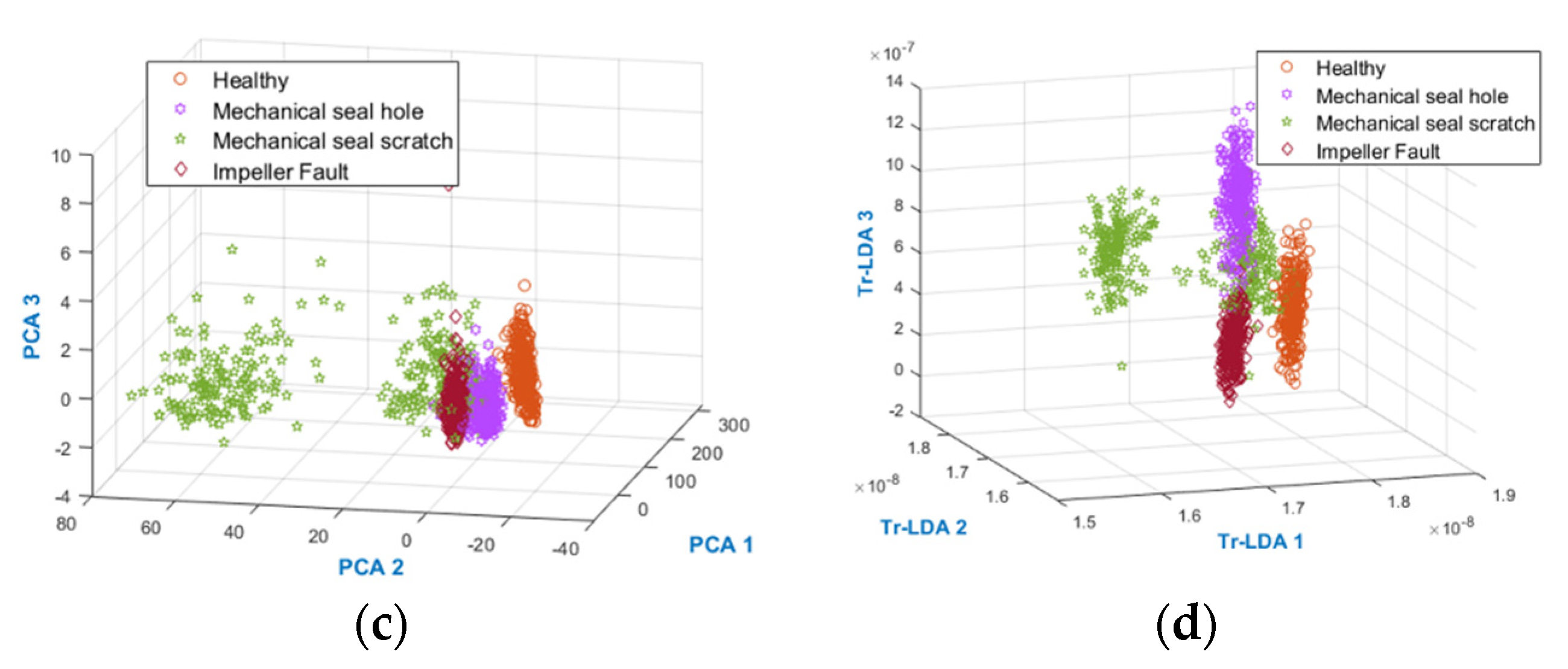
- Ir-PCA was proposed for discriminant feature extraction for MCP fault diagnosis. To the best of our knowledge, Ir-PCA has not been reported. Ir-PCA first assesses the feature informativeness towards the fault by calculating the informative ratio of the features. To obtain a discriminant set of features with reduced dimensions, PCA was applied to the features with a high informative ratio.
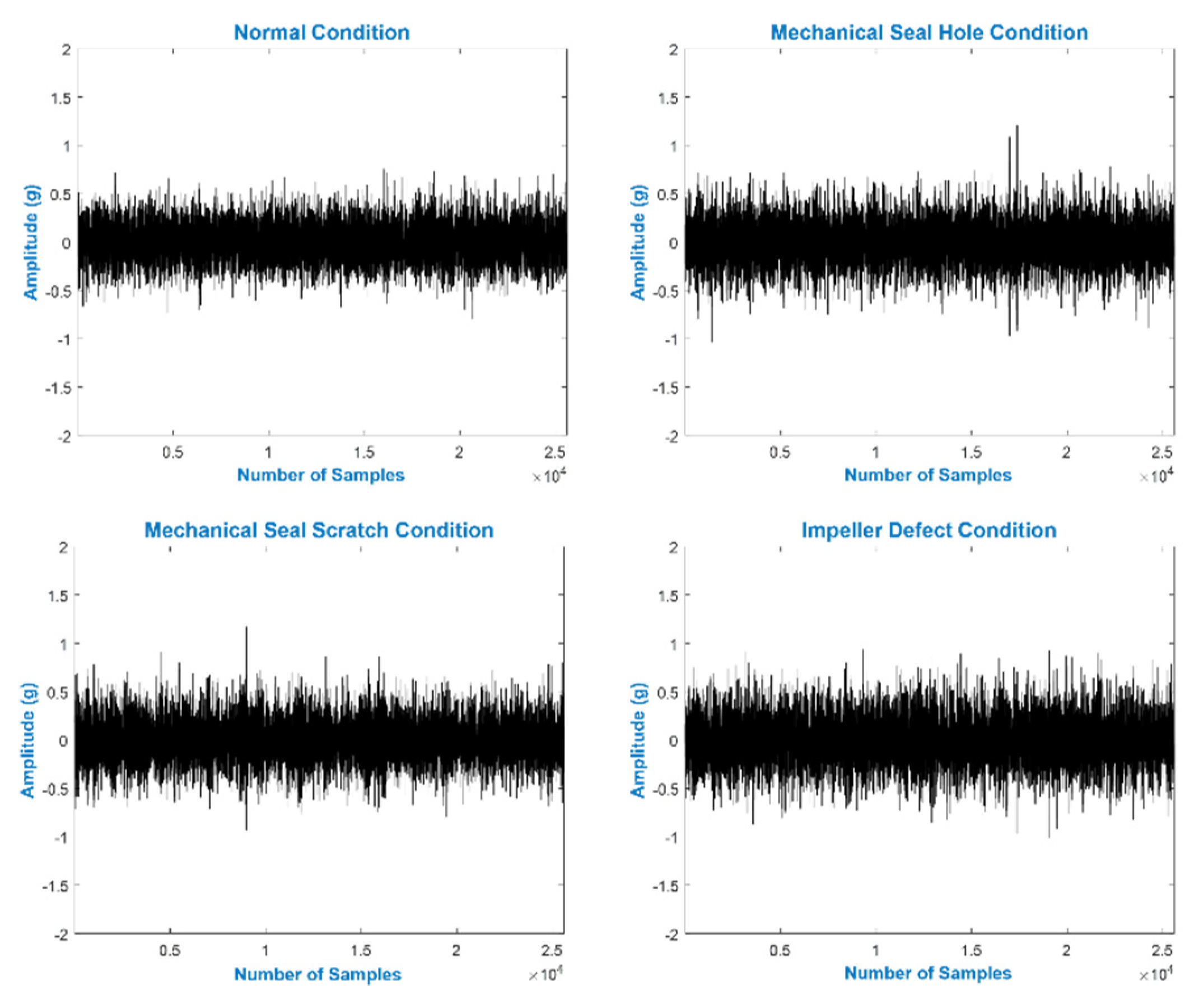
- The MCP vibration signal obtained from a real-world industrial test rig was used for the evaluation of the proposed method.
2. Technical Review
2.1. Review of Principle Component Analysis
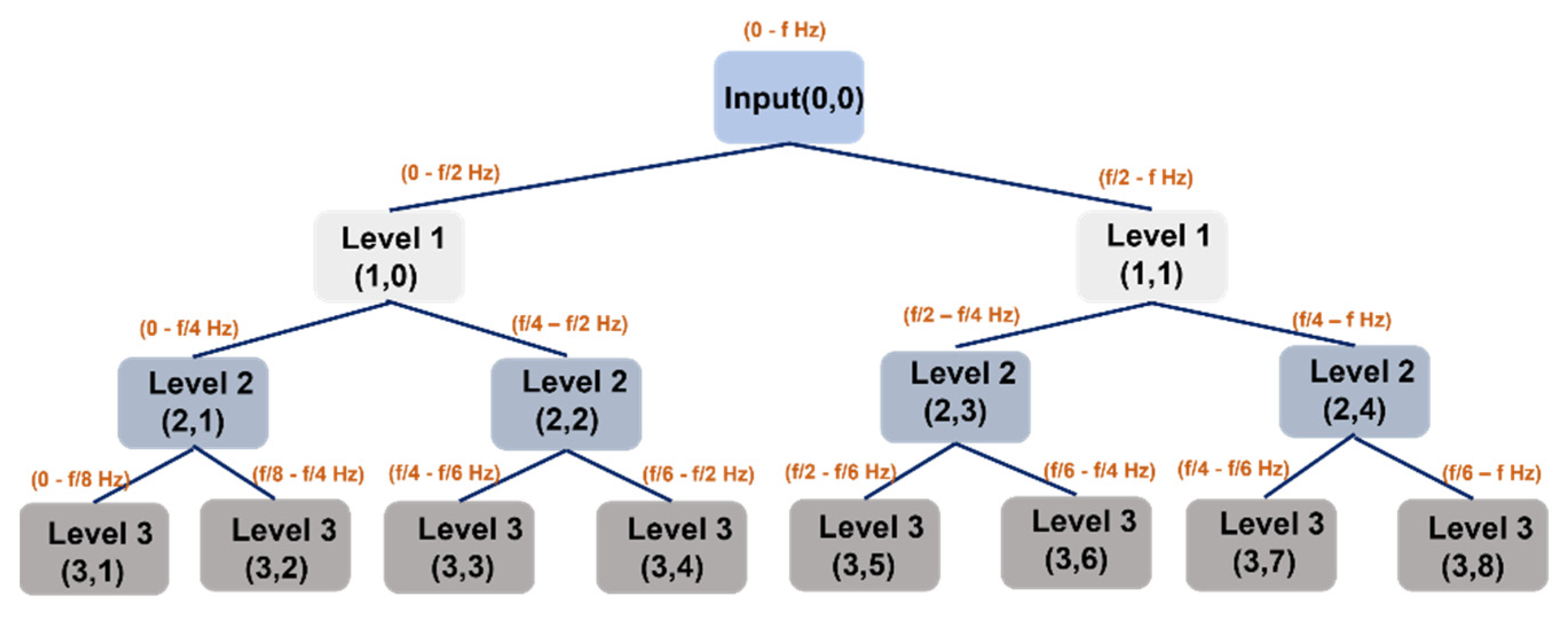
2.2. Review of the Wavelet Packet Transform (WPT)
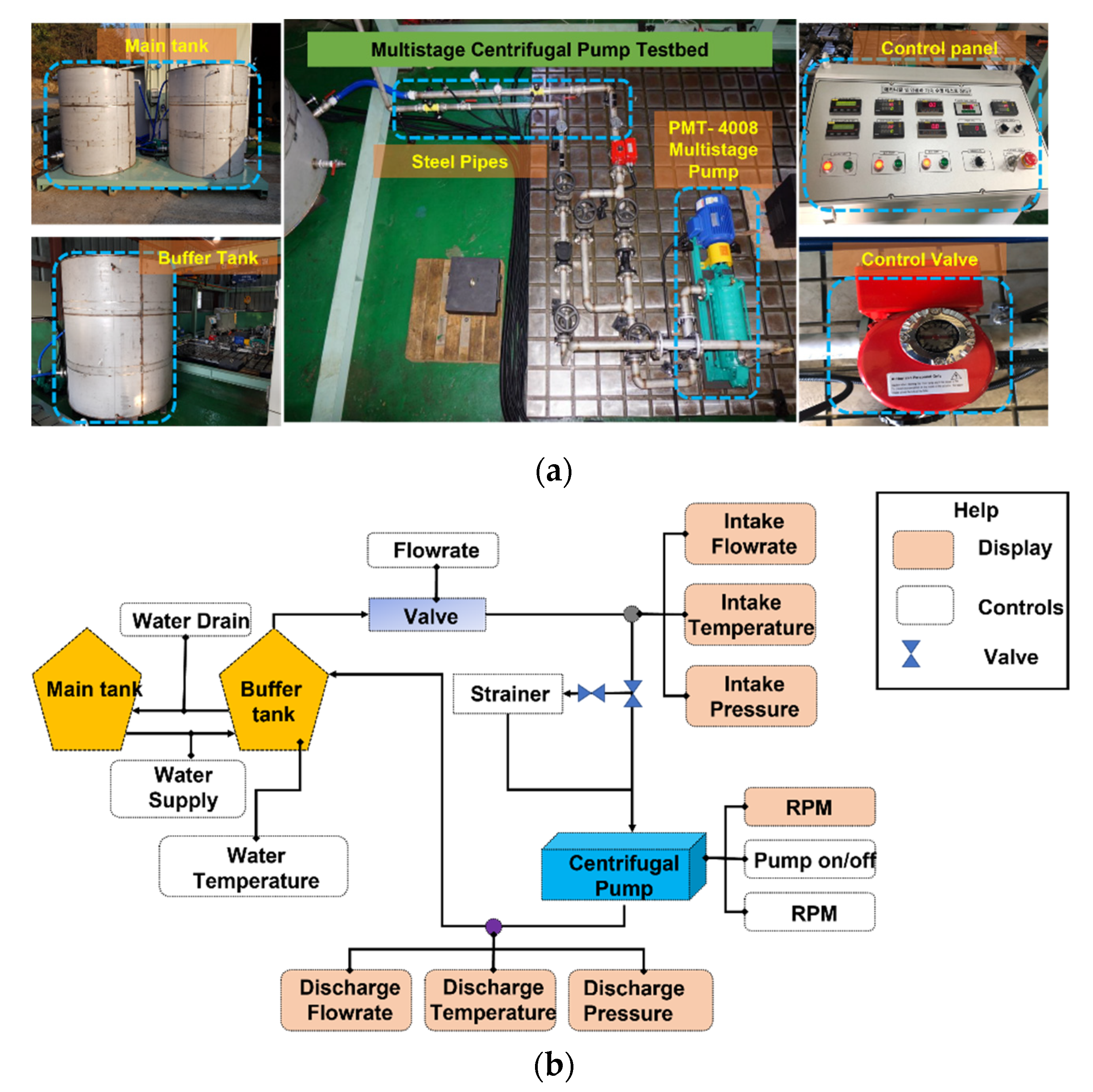
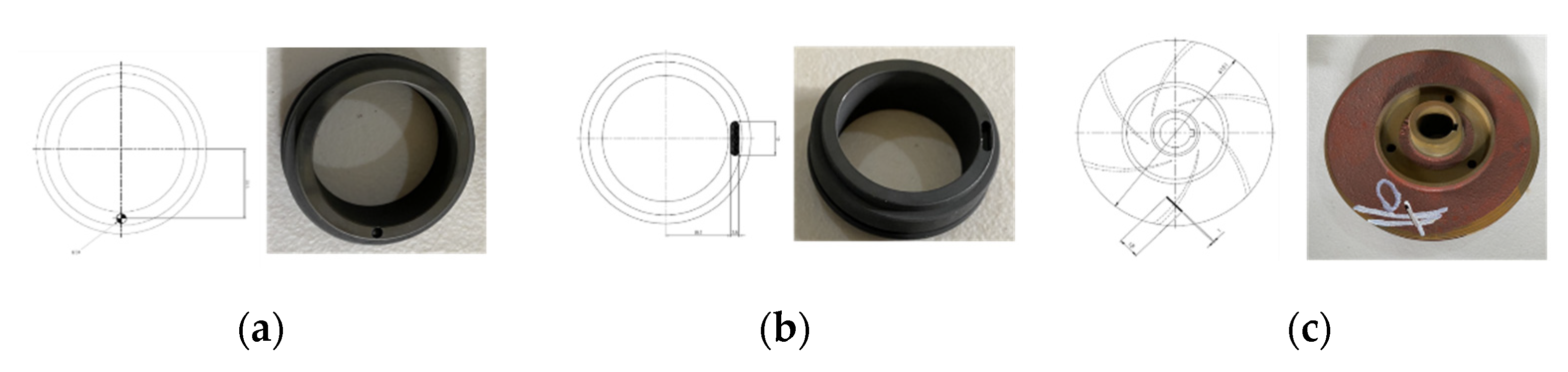
3. Pump Experimental Test Rig
4. Proposed Fault Diagnosis Method
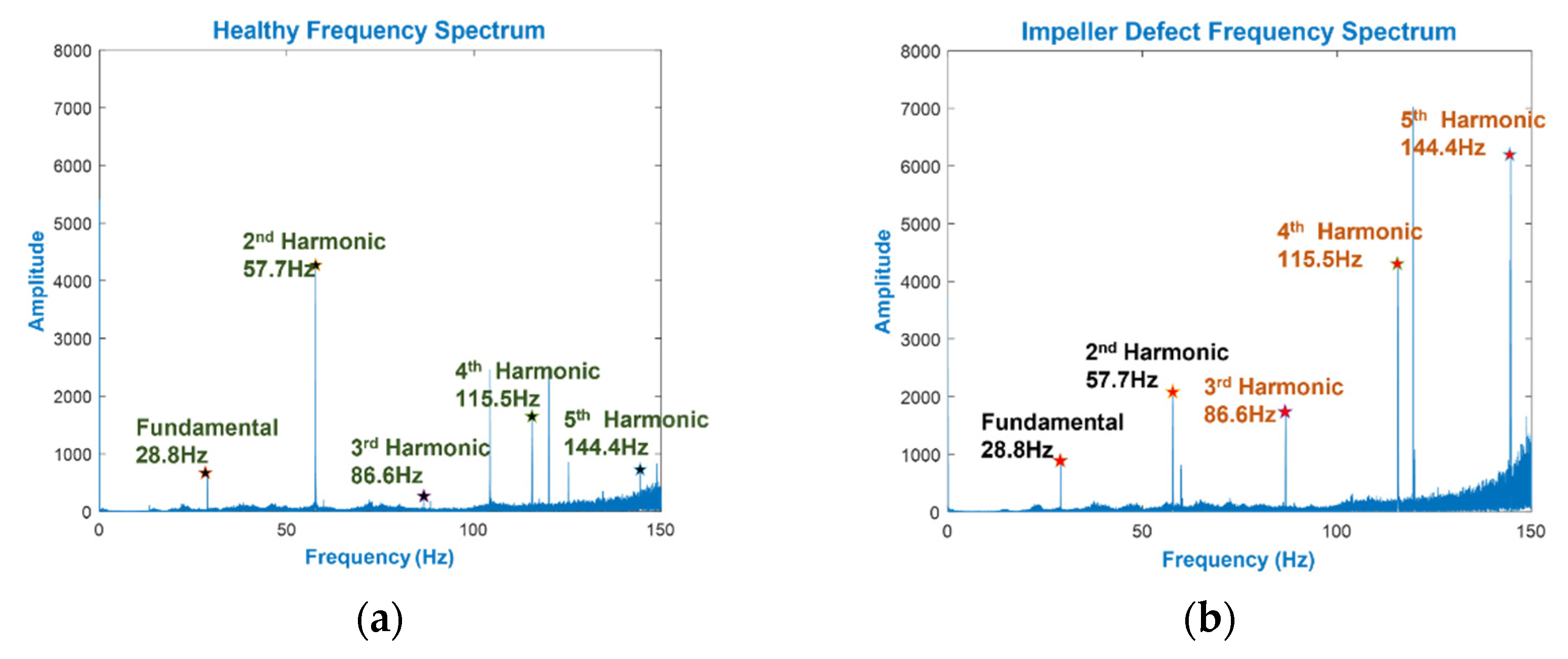
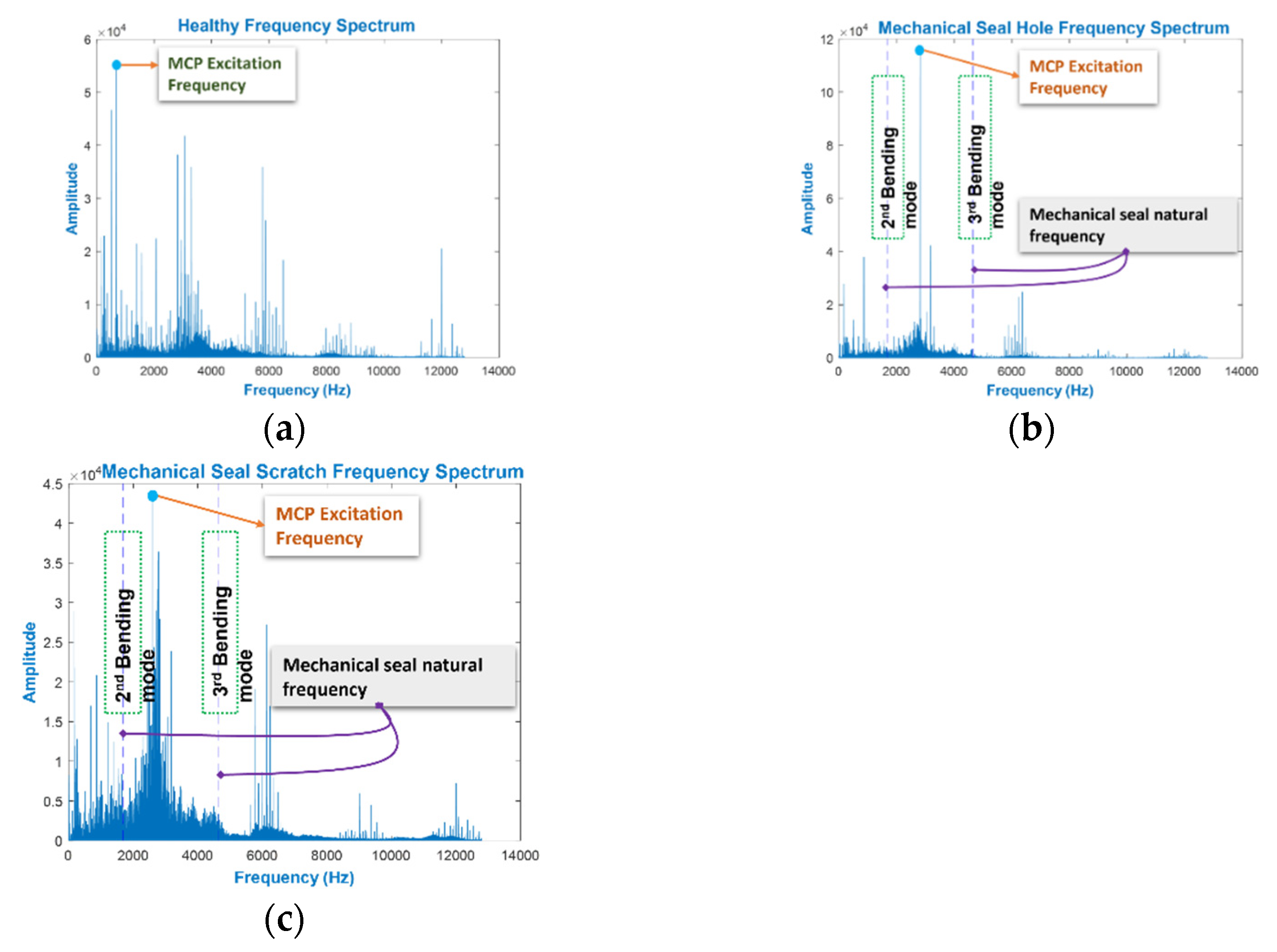
4.1. Step 1: Fault Specific Frequency Band Selection
4.2. Step 2: Multi-Domain Feature Pool Construction
4.3. Step 3: Novel Informative Ratio Principal Component Analysis
5. Results and Performance Evaluation
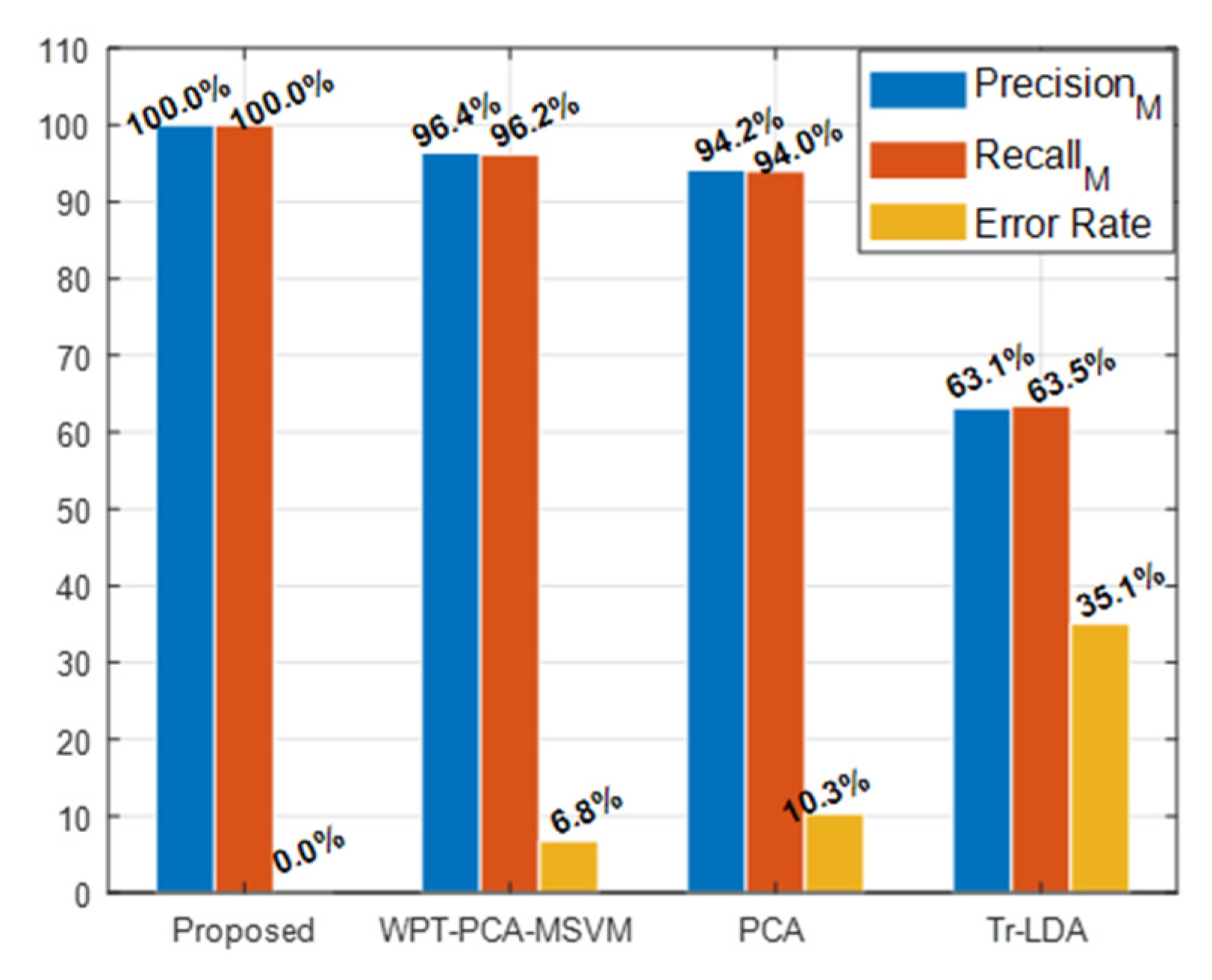
Performance Comparison of the Proposed and Reference Methods
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ntoko, N.-M.; Djidjou, K.; Harrison, N. A Basis for Teaching Centrifugal Pump Characteristics in an Undergraduate Course in Turbomachinery. Int. J. Mech. Eng. Educ. 2005, 33, 283–293. [Google Scholar] [CrossRef]
- Rane, S.B.; Narvel, Y.A.M. Re-designing the business organization using disruptive innovations based on blockchain-IoT integrated architecture for improving agility in future Industry 4.0. Benchmarking Int. J. 2021, 28, 1883–1908. [Google Scholar] [CrossRef]
- Ahmad, Z.; Rai, A.; Hasan, J.; Kim, C.H.; Kim, J.-M. A Novel Framework for Centrifugal Pump Fault Diagnosis by Selecting Fault Characteristic Coefficients of Walsh Transform and Cosine Linear Discriminant Analysis. IEEE Access 2021, 9, 150128–150141. [Google Scholar] [CrossRef]
- Cao, S.; Hu, Z.; Luo, X.; Wang, H. Research on fault diagnosis technology of centrifugal pump blade crack based on PCA and GMM. Measurement 2020, 173, 108558. [Google Scholar] [CrossRef]
- Chittora, S.M. Monitoring of Mechanical Seals in Process Pumps. 2018. Available online: http://www.diva-portal.org/smash/get/diva2:1255405/FULLTEXT01.pdf (accessed on 15 June 2021).
- Ahmad, Z.; Rai, A.; Maliuk, A.S.; Kim, J.-M. Discriminant Feature Extraction for Centrifugal Pump Fault Diagnosis. IEEE Access 2020, 8, 165512–165528. [Google Scholar] [CrossRef]
- Qin, Y.; Member, S.; Jin, L.; Zhang, A.; He, B. Rolling Bearing Fault Diagnosis With Adaptive Harmonic Kurtosis and Improved Bat Algorithm. IEEE Trans. Instrum. Meas. 2021, 70, 3508112. [Google Scholar] [CrossRef]
- Maliuk, A.S.; Prosvirin, A.E.; Ahmad, Z.; Kim, C.H.; Kim, J.-M. Novel Bearing Fault Diagnosis Using Gaussian Mixture Model-Based Fault Band Selection. Sensors 2021, 21, 6579. [Google Scholar] [CrossRef]
- Prosvirin, A.E.; Ahmad, Z.; Kim, J.-M. Global and Local Feature Extraction Using a Convolutional Autoencoder and Neural Networks for Diagnosing Centrifugal Pump Mechanical Faults. IEEE Access 2021, 9, 65838–65854. [Google Scholar] [CrossRef]
- Shao, Y.; Kang, R.; Liu, J. Rolling Bearing Fault Diagnosis Based on the Coherent Demodulation Model. IEEE Access 2020, 8, 207659–207671. [Google Scholar] [CrossRef]
- Tra, V.; Kim, J.-M. Pressure Vessel Diagnosis by Eliminating Undesired Signal Sources and Incorporating GA-Based Fault Feature Evaluation. IEEE Access 2020, 8, 134653–134667. [Google Scholar] [CrossRef]
- Jalayer, M.; Orsenigo, C.; Vercellis, C. Fault detection and diagnosis for rotating machinery: A model based on convolutional LSTM, Fast Fourier and continuous wavelet transforms. Comput. Ind. 2020, 125, 103378. [Google Scholar] [CrossRef]
- Zhang, K.; Ma, C.; Xu, Y.; Chen, P.; Du, J. Feature extraction method based on adaptive and concise empirical wavelet transform and its applications in bearing fault diagnosis. Measurement 2021, 172, 108976. [Google Scholar] [CrossRef]
- Wei, H.; Zhang, Q.; Shang, M.; Gu, Y. Extreme Learning Machine-based Classifier for Fault Diagnosis of Rotating Machinery using a Residual Network and Continuous Wavelet Transform. Measurement 2021, 183, 109864. [Google Scholar] [CrossRef]
- Rapur, J.S.; Tiwari, R. Experimental fault diagnosis for known and unseen operating conditions of centrifugal pumps using MSVM and WPT based analyses. Measurement 2019, 147, 106809. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Alabied, S.; Haba, U.; Daraz, A.; Gu, F.; Ball, A.D. Empirical Mode Decomposition of Motor Current Signatures for Centrifugal Pump Diagnostics. In Proceedings of the 2018 24th International Conference on Automation and Computing (ICAC), Newcastle Upon Tyne, UK, 6–7 September 2018. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Nguyen, C.D.; Ahmad, Z.; Kim, J.-M. Gearbox Fault Identification Framework Based on Novel Localized Adaptive Denoising Technique, Wavelet-Based Vibration Imaging, and Deep Convolutional Neural Network. Appl. Sci. 2021, 11, 7575. [Google Scholar] [CrossRef]
- Hasan, J.; Rai, A.; Ahmad, Z.; Kim, J.-M. A Fault Diagnosis Framework for Centrifugal Pumps by Scalogram Based Imaging and Deep Learning. IEEE Access 2021, 9, 58052–58066. [Google Scholar] [CrossRef]
- Saeed, U.; Lee, Y.-D.; Jan, S.; Koo, I. CAFD: Context-Aware Fault Diagnostic Scheme towards Sensor Faults Utilizing Machine Learning. Sensors 2021, 21, 617. [Google Scholar] [CrossRef]
- Reges, G.; Fontana, M.; Ribeiro, M.; Silva, T.; Abreu, O.; Reis, R.; Schnitman, L. Electric submersible pump vibration analysis under several operational conditions for vibration fault differential diagnosis. Ocean Eng. 2020, 219, 108249. [Google Scholar] [CrossRef]
- Gonçalves, J.P.S.; Fruett, F.; Filho, J.G.D.; Giesbrecht, M. Faults detection and classification in a centrifugal pump from vibration data using markov parameters. Mech. Syst. Signal Process. 2021, 158, 107694. [Google Scholar] [CrossRef]
- Saucedo-Dorantes, J.J.; Arellano-Espitia, F.; Delgado-Prieto, M.; Osornio-Rios, R.A. Diagnosis Methodology Based on Deep Feature Learning for Fault Identification in Metallic, Hybrid and Ceramic Bearings. Sensors 2021, 21, 5832. [Google Scholar] [CrossRef]
- Ahmad, W.; Ayub, N.; Ali, T.; Irfan, M.; Awais, M.; Shiraz, M.; Glowacz, A. Towards Short Term Electricity Load Forecasting Using Improved Support Vector Machine and Extreme Learning Machine. Energies 2020, 13, 2907. [Google Scholar] [CrossRef]
- Lei, Y. Intelligent Fault Diagnosis and Remaining Useful Life Prediction of Rotating Machinery; Butterworth-Heinemann: Amsterdam, The Netherlands, 2016; pp. 12–86. [Google Scholar] [CrossRef]
- Hasan, J.; Sohaib, M.; Kim, J.-M. An Explainable AI-Based Fault Diagnosis Model for Bearings. Sensors 2021, 21, 4070. [Google Scholar] [CrossRef]
- Jin, T.; Yan, C.; Chen, C.; Yang, Z.; Tian, H.; Wang, S. Light neural network with fewer parameters based on CNN for fault diagnosis of rotating machinery. Measurement 2021, 181, 109639. [Google Scholar] [CrossRef]
- Orrù, P.; Zoccheddu, A.; Sassu, L.; Mattia, C.; Cozza, R.; Arena, S. Machine Learning Approach Using MLP and SVM Algorithms for the Fault Prediction of a Centrifugal Pump in the Oil and Gas Industry. Sustainability 2020, 12, 4776. [Google Scholar] [CrossRef]
- Yu, D.; Guo, J.; Zhao, Q.; Zhao, D.; Hong, J. Fault diagnosis for underdetermined multistage assembly processes via an enhanced Bayesian hierarchical model. J. Manuf. Syst. 2020, 58, 280–290. [Google Scholar] [CrossRef]
- Liu, R.; Yang, B.; Zio, E.; Chen, X. Artificial intelligence for fault diagnosis of rotating machinery: A review. Mech. Syst. Signal Process. 2018, 108, 33–47. [Google Scholar] [CrossRef]
- Mondal, P.P.; Ferreira, P.M.; Kapoor, S.G.; Bless, P.N. Monitoring and Diagnosis of Multistage Manufacturing Processes Using Hierarchical Bayesian Networks. Procedia Manuf. 2021, 53, 32–43. [Google Scholar] [CrossRef]
- Papananias, M.; McLeay, T.E.; Obajemu, O.; Mahfouf, M.; Kadirkamanathan, V. Inspection by exception: A new machine learning-based approach for multistage manufacturing. Appl. Soft Comput. 2020, 97, 106787. [Google Scholar] [CrossRef]
- Tayyab, S.M.; Asghar, E.; Pennacchi, P.; Chatterton, S. Intelligent fault diagnosis of rotating machine elements using machine learning through optimal features extraction and selection. Procedia Manuf. 2020, 51, 266–273. [Google Scholar] [CrossRef]
- Palacín, I.; Gibert, D.; Planes, J.; Arena, S.; Orru, P.F.; Melis, M.; Annis, M. Anomaly Detection for Diagnosing Failures in a Centrifugal Compressor Train. In Proceedings of the 23rd International Conference of the Catalan Association for Artificial Intelligence, CCIA 2021, Lleida, Spain, 20–22 October 2021; Volume 339, pp. 217–220. [Google Scholar]
- He, F.; Zhang, Z. Nonlinear Fault Detection of Batch Processes Using Functional Local Kernel Principal Component Analysis. IEEE Access 2020, 8, 117513–117527. [Google Scholar] [CrossRef]
- Wang, H.; Yao, M. Fault detection of batch processes based on multivariate functional kernel principal component analysis. Chemom. Intell. Lab. Syst. 2015, 149, 78–89. [Google Scholar] [CrossRef]
- He, F.; Wang, C.; Fan, S.-K.S. Nonlinear fault detection of batch processes based on functional kernel locality preserving projections. Chemom. Intell. Lab. Syst. 2018, 183, 79–89. [Google Scholar] [CrossRef]
- Yang, L.; Liu, X.; Nie, F.; Liu, Y. Robust and Efficient Linear Discriminant Analysis with L 2,1-Norm for Feature Selection. IEEE Access 2020, 8, 44100–44110. [Google Scholar] [CrossRef]
- Ahmad, Z.; Prosvirin, A.E.; Kim, J.; Kim, J.-M. Multistage Centrifugal Pump Fault Diagnosis by Selecting Fault Characteristic Modes of Vibration and Using Pearson Linear Discriminant Analysis. IEEE Access 2020, 8, 223030–223040. [Google Scholar] [CrossRef]
- Jin, X.; Zhao, M.; Chow, T.W.S.; Pecht, M. Motor Bearing Fault Diagnosis Using Trace Ratio Linear Discriminant Analysis. IEEE Trans. Ind. Electron. 2013, 61, 2441–2451. [Google Scholar] [CrossRef]
- Sakthivel, N.; Nair, B.B.; Elangovan, M.; Sugumaran, V.; Saravanmurugan, S. Comparison of dimensionality reduction techniques for the fault diagnosis of mono block centrifugal pump using vibration signals. Eng. Sci. Technol. Int. J. 2014, 17, 30–38. [Google Scholar] [CrossRef] [Green Version]
- Nikolaou, N.G.; Antoniadis, I.A. Application of Wavelet Packets in Bearing Fault Diagnosis. In Proceedings of the 5th WSES International Conference on Circuits, Systems, Communications and Computers (CSCC 2001), Rethymno, Greece, 8–15 July 2001; pp. 12–19. [Google Scholar]
- Yedidiah, S. (Ed.) Centrifugal Pump User’s Guidebook Problems and Solutions; Springer: Berlin, Germany, 1996. [Google Scholar]
- Picolet, L.E. Vibration problems in engineering. J. Frankl. Inst. 1929, 207, 286–287. [Google Scholar] [CrossRef]
- Muralidharan, V.; Sugumaran, V. Feature extraction using wavelets and classification through decision tree algorithm for fault diagnosis of mono-block centrifugal pump. Measurement 2013, 46, 353–359. [Google Scholar] [CrossRef]
- Muralidharan, V.; Sugumaran, V.; Indira, V. Fault diagnosis of monoblock centrifugal pump using SVM. Eng. Sci. Technol. Int. J. 2014, 17, 152–157. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Name | Equation | Feature Name | Equation |
|---|---|---|---|
| Mean | Variance | ||
| Root amplitude | Skewness | ||
| RMS | Clearance factor | ||
| Impulse factor | Kurtosis | ||
| Shape factor | Peak value | ||
| Standard deviation | Crest factor |
| Feature Name | Equation | Feature Name | Equation |
|---|---|---|---|
| Mean frequency | Standard deviation | ||
| Root variance frequency | Spectral kurtosis | ||
| Root mean square frequency |
| Methods | T-PR (%) | AAC (%) | |||
|---|---|---|---|---|---|
| NC | MSH | MSSH | ID | ||
| Proposed | 100 | 100 | 100 | 100 | 100 |
| WPT-PCA-MSVM | 100 | 94.11 | 96.55 | 94.91 | 96.39 |
| PCA-KNN | 100 | 92.45 | 86.45 | 96.96 | 94 |
| Tr-LDA | 65.42 | 68.53 | 52.25 | 67.74 | 63.48 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, Z.; Nguyen, T.-K.; Ahmad, S.; Nguyen, C.D.; Kim, J.-M. Multistage Centrifugal Pump Fault Diagnosis Using Informative Ratio Principal Component Analysis. Sensors 2022, 22, 179. https://doi.org/10.3390/s22010179
Ahmad Z, Nguyen T-K, Ahmad S, Nguyen CD, Kim J-M. Multistage Centrifugal Pump Fault Diagnosis Using Informative Ratio Principal Component Analysis. Sensors. 2022; 22(1):179. https://doi.org/10.3390/s22010179
Chicago/Turabian StyleAhmad, Zahoor, Tuan-Khai Nguyen, Sajjad Ahmad, Cong Dai Nguyen, and Jong-Myon Kim. 2022. "Multistage Centrifugal Pump Fault Diagnosis Using Informative Ratio Principal Component Analysis" Sensors 22, no. 1: 179. https://doi.org/10.3390/s22010179
APA StyleAhmad, Z., Nguyen, T.-K., Ahmad, S., Nguyen, C. D., & Kim, J.-M. (2022). Multistage Centrifugal Pump Fault Diagnosis Using Informative Ratio Principal Component Analysis. Sensors, 22(1), 179. https://doi.org/10.3390/s22010179