
Cloud Platforms for Context-Adaptive Positioning and Localisation in GNSS-Denied Scenarios—A Systematic Review

 ,
,  ,
,  ,
, 

Abstract
:1. Introduction
2. Related Work
3. Research Method
3.1. Research Questions
- MRQ
- What are the possible gaps or issues in Cloud Platforms for positioning and navigation in GNSS-denied environments?
- RQ1
- Are the main computing paradigms used in current indoor positioning platforms?This research question permits to identify if the current indoor positioning platforms are using the main computing paradigms. This question allows us to determine future trends regarding indoor positioning platforms and computing paradigms.
- RQ2
- What network protocols do the current platforms use to provide reliable services?This question addresses the need to know which network protocols are used in the current indoor positioning platforms. Additionally, this research question helps to identify strengths and weaknesses of the used communication protocols in the scope of indoor positioning.
- RQ3
- Do the current platforms permit heterogeneous positioning technologies for GNSS-denied scenarios?This research question allows us to determine the current platforms’ flexibility to support diverse position technologies.
- RQ4
- Do the current platforms adapt to different scenarios?As the diversity of indoor scenarios are currently considered a main challenge for providing positioning indoors, this research question helps to identify the limitations of the current systems.
- RQ5
- What were the improvements done in similar studies?This research question aims to identify the main contribution of the studies analysed and the current challenges in indoor positioning platforms.
- RQ6
- How is the standardization aspect dealt with on different platforms?Standardization is key to providing a more reliable and high-quality indoor positioning platform. Thus, this research question aims to identify if the current systems consider the existing standards for IPS in different dimensions.
3.2. Keywords
3.3. Query
- Web Of Science Query:
- SCOPUS Query:
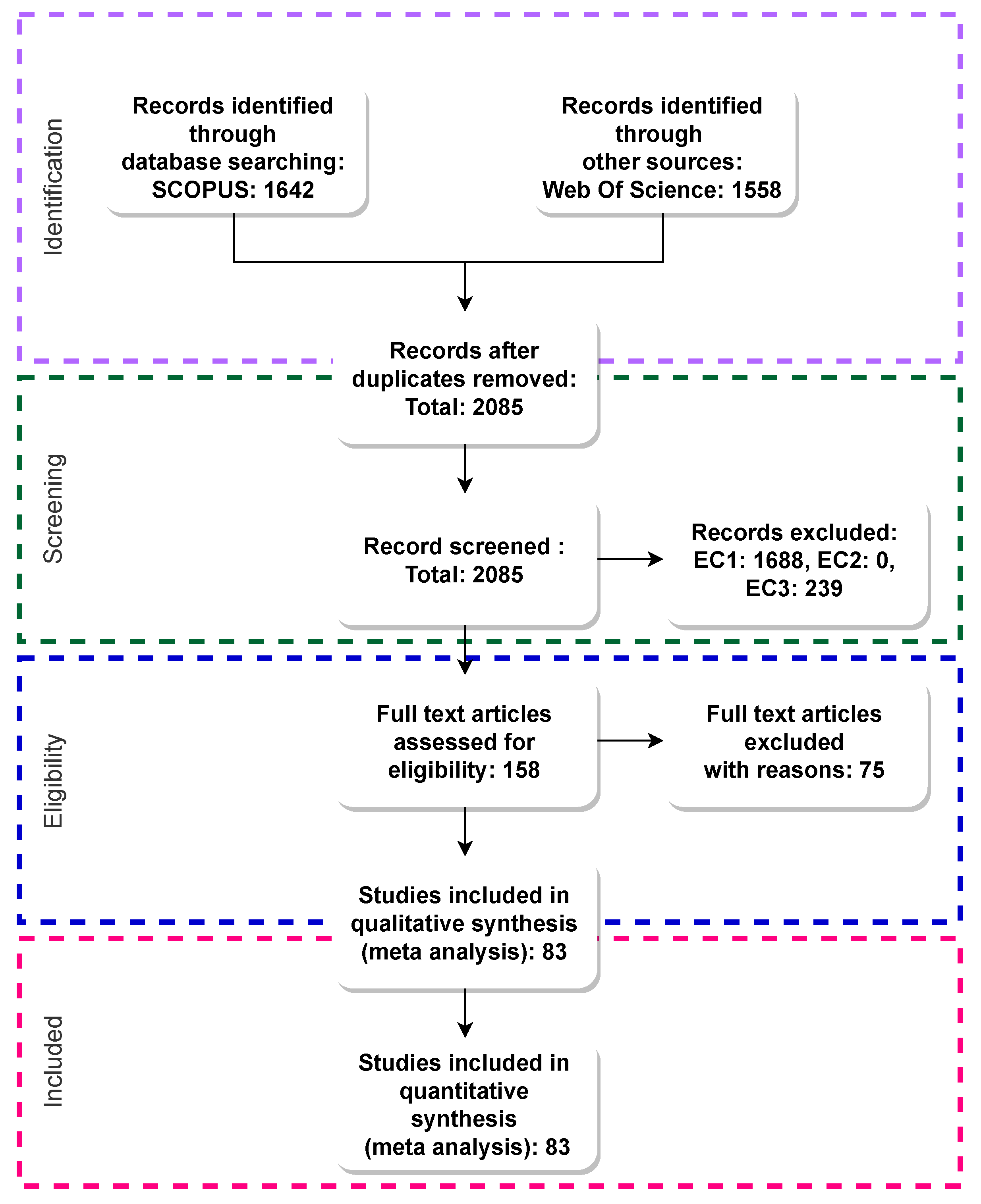
3.4. Study Selection
3.4.1. Stage 1: Identification
3.4.2. Stage 2: Screening and Selection Criteria
- IC1
- Full research works written in English
- IC2
- Research works dealing with platforms supporting positioning
- EC1
- Works not dealing with any computing paradigm (e.g., Cloud computing) or GNSS-denied scenarios
- EC2
- Works not published in peer-reviewed international journals or conference proceedings
- EC3
- Studies not dealing with wearable devices (we consider smartphones as wearable devices)
3.4.3. Stage 3: Eligibility
3.4.4. Stage 4: Included
3.5. Main Figures for the PRISMA Process in the Current Review
3.6. Overview of the Selected Studies
3.7. Data Extraction
4. Results
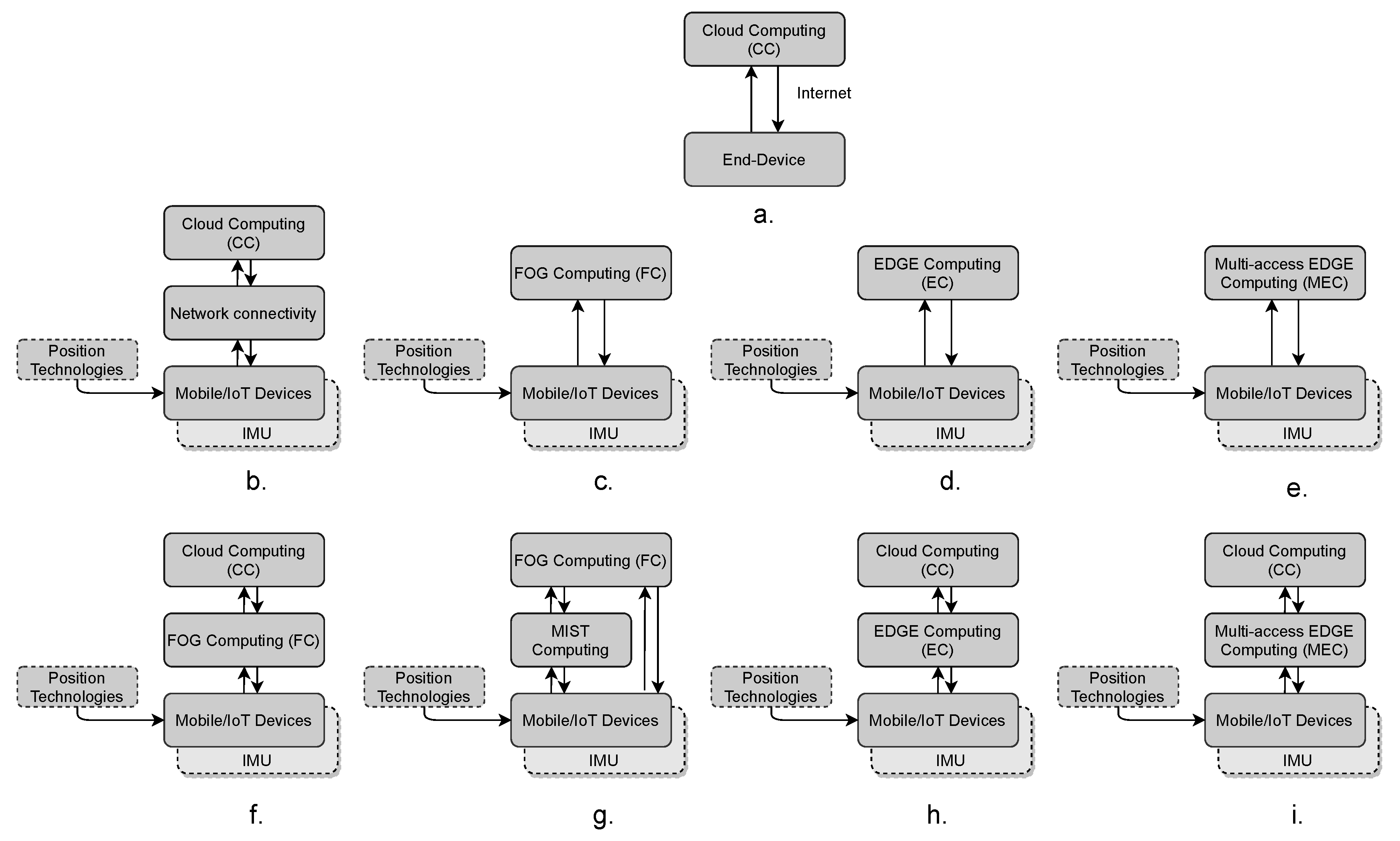
4.1. Computing Paradigms Used in Current Indoor Positioning Platforms (RQ1)
4.1.1. Cloud Computing (CC)
4.1.2. Mobile Cloud Computing (MCC)
4.1.3. Fog Computing (FC)
4.1.4. Mist Computing
4.1.5. Edge Computing
4.1.6. Multi-Access Edge Computing
4.2. Network Protocols Used in Current Cloud-Based Indoor Positioning Platforms (RQ2)
4.2.1. Communication Protocols
4.2.2. Security Protocols
4.2.3. IoT Protocols
4.2.4. Other Protocols
4.3. Do the Current Platforms Permit Heterogeneous Positioning Technologies for GNSS-Denied Scenarios? (RQ3)
4.3.1. Radio Frequency Technologies
IEEE 802.11 Wireless LAN (Wi-Fi)
Bluetooth
Ultra Wideband (UWB)
Cellular/Mobile Networks
IEEE 802.15.4—Zigbee
Radio Frequency Identifier (RFID)
4.3.2. Magnetic Field
4.3.3. Inertial Technology
4.3.4. Computer Vision-Based Technology
4.3.5. Sound-Based Technologies
4.3.6. Optical Technologies
4.4. Do the Current Platforms Adapt to Different Scenarios? (RQ4)
4.4.1. Platform
4.4.2. Environment
4.4.3. Client
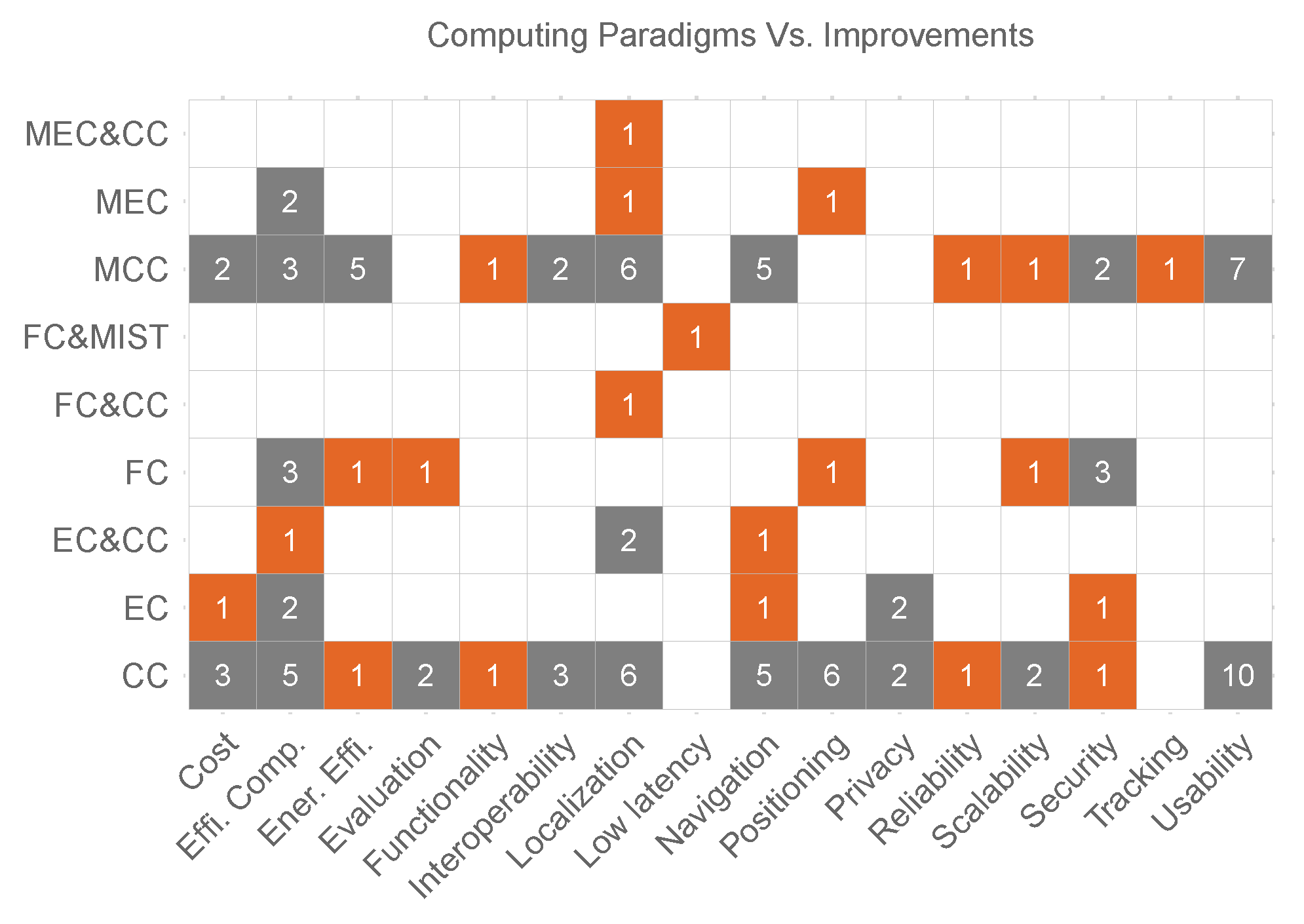
4.5. What Improvements Were Done in Similar Studies (RQ5)
- Efficient Computation [45,48,52,61,68,74,85,94,102,115]: It consists of improving the methods or algorithms used in mobile devices and the Cloud in order to decrease the use of computational resources. To reduce the computational load in mobile devices, the authors offload specific processes to the Cloud or other computational paradigms (see Section 4.1). Moreover, researchers have proposed some optimizations to traditional algorithms and databases in order to improve their efficiency and time response.
- Interoperability [54,78,79,95]: It is the capability to interact with other systems, platforms, or devices through its interfaces. Thus, they can exchange information simultaneously, allowing them to integrate with each other and provide synchronous communication. This is especially valuable in light of the heterogeneity of the deployed IPS, and the need for position and localisation services in other areas such as healthcare systems, i.e., if an ILS only shares the estimated position and does not provide interfaces to share raw data, these raw data cannot be integrated into a sensor fusion approach.
- Position [55,56,58,74,85,123]: The articles studied proposed different technologies, techniques, and methods to reduce the error in the position estimation (see Section 4.3). Additionally, the use of computing paradigms (e.g., CC, FC, MCC, EC) have been used in some articles to support the positioning process.
- Usability [8,13,39,40,43,77,79,80,83,96,97,106,111,124]: It is linked to the user experience providing a platform easy to use that satisfy the user’s requirements. For instance, Yeh et al. [39] developed a Cloud platform for parking services (e.g., search parking places, reservation, navigation), providing a useful and efficient system to end-users which satisfies the need for parking systems. Additionally, some of the applications or frameworks are oriented to developers or users in general who have limited knowledge of positioning systems and programming, allowing fast development of a new application.
- Localisation [7,10,16,42,58,72,75,76,82,107,110,114,121,125,126]: Similar to position, localisation aims to provide better localisation accuracy by combining different techniques, technologies, and algorithms. In the current studies, localisation techniques have been used to locate people in different environments such as shopping malls, universities, hotels, among others.
- Cost [45,67,88,94,105]: The cost is one of the prime considerations when researchers and companies develop their indoor positioning platforms. That is why technologies like Wi-Fi and BLE have been chosen, despite their poor accuracy compared to, for instance, UWB. Moreover, the use of Cloud Computing (CC) offers pay-as-you-go, enabling users to pay only for the services and resources procured.
- Navigation [11,46,55,59,69,99,111,112,120,127]: Many of the current studies are focused on improving or providing navigation service. For instance, to provide navigation services for shopping malls or select the best route to emergency exits. The navigation service is also used to choose the least congested route to a particular place.
- Low latency [64,106,111]: This is a critical point in time-sensitive networks, and it is related to the delay in the data transmission. It is the time that it takes a message to go from the source to the target. It is specially required for real-time communications. Thus, in order to provide real-time indoor positioning/localisation/navigation applications, the authors use different technologies, techniques and computing paradigms (see Section 4.1 and Section 4.3) in order to reduce the latency, for instance, FC is used for facing the latency problems caused by the large number of connections to the IPS.
- Energy efficiency [58,59,103,116,128]: Several measures have been taken to reduce the energy consumed while performing a task. However, the main method used in the current studies is to offload certain processes from the mobile device to computing paradigms. This allows the use of IPS in low-profile devices such as IoT and wearable devices.
- Reliability [8,110]: To provide reliable positioning and localisation information in a variety of environments with a minimum of errors, providing a high-quality service. However, providing reliable systems is not easy given the complexity of IPS/ILS. For instance, the authors of [110] implemented their system at a building construction site in three scenarios in order to test the accuracy, latency, and system reliability, obtaining a precision of 85% and accuracy of 88%, approximately. Ref. [8] developed a reliable localization web platform providing remote access to numerous users.
- Tracking: It determines the current user position in real-time with minimum delays. In order to provide tracking services, the authors use certain algorithms and technologies. For example, Sujin et al. [121] used a stochastic model, namely the Markov model, which is used for device tracking.
- Evaluation: It is one of the important aspect for indoor positioning platforms in order to determine the performance and if it fulfils all the technical and user requirements. This evaluation could be carried out in simulated environments or real environments following a specific standard similar to the platform developed by Haute et al. [43].
- Privacy [70]: Given that some of the information collected to train positioning and localisation models might contain sensitive data, the authors provide some mechanism to protect the privacy of the user information during the process in any of the computing paradigms. For instance, Zhang et al. [70] applied differential privacy to Edge-based IPS. This research aims to protect user information when it is used to train positioning localisation models in the EC.
- Security [63,71,91,119,129]: Various techniques, protocols, or devices have been developed over the year to protect user information. Thus, protocols like HTTPS are widely used to provide safe data transfer. Moreover, other mechanisms have been adopted to determine anomalies during the data collection and verify security issues in indoor positioning platforms.
4.6. How Is the Standardization Aspect Focused on Different Platforms? (RQ6)
4.6.1. Maps
4.6.2. Position Technologies
4.6.3. Evaluation Methods
4.6.4. Software Architecture
5. Discussion of the State of the Art
5.1. Computing Paradigms and Improvements (RQ1 and RQ5)
5.2. Network Protocols RQ2
5.3. Indoor Positioning Technologies (RQ3)
5.4. Cloud-Based Indoor Positioning Platforms—Scenarios (RQ4)
5.5. Standardization (RQ6)
5.6. Current Challenges
5.6.1. Challenges Related to Computing Paradigms
5.6.2. Challenges Related to Software
5.6.3. Challenges Related to Standardization
5.7. Future Trends
6. Threats to Validity
6.1. Methodology Selection
6.2. Primarily Studies Selection
6.3. Selection of Studies
6.4. Replicability
7. Conclusions and Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AMQP | Advanced Message Queuing Protocol |
| AoA | Angle of Arrival |
| AP | Access Point |
| API | Application Programming Interface |
| AR | Augmented Reality |
| BIM | Building Information Modeling |
| BLE | Bluetooth Low Energy |
| CC | Cloud Computing |
| CNN | Convolutional Neural Networks |
| CoAP | Constrained Application Protocol |
| CSI | Channel State Information |
| D2D | Device to Device |
| DR | Dead Reckoning |
| EC | Edge Computing |
| eMBB | enhanced Mobile Broadband |
| FC | Fog Computing |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| GSM | Global System for Mobile Communications |
| HTTP | HyperText Transfer Protocol |
| HTTPS | Hypertext Transfer Protocol Secure |
| IaaS | Infrastructure as a Service |
| ILS | Indoor Location System |
| IMU | Inertial Measurement Units |
| iNaaS | Indoor Navigation as a Service |
| INS | Indoor Navigation System |
| IoT | Internet of Things |
| IP | Internet Protocol |
| IPS | Indoor Positioning System |
| ISO | International Organization for Standardization |
| KF | Kalman filter |
| k-NN | k-Nearest Neighbor |
| LBS | Location-Based Services |
| LoST | Location-to-Service Translation Protocol |
| LSTM | Long short-term memory |
| LTS | Localization and Tracking System |
| M2M | Machine to Machine |
| MAC | Media Access Control |
| MC | Mist Computing |
| MDS | Multidimensional Scaling |
| MEC | Multi-access Edge Computing |
| ML | Machine Learning |
| mMTC | massive Machine Type Communications |
| MCC | Mobile Cloud Computing |
| MSA | Microservice Architecture |
| MVC | Model–view–controller |
| MVVM | Model–view–viewmodel |
| MQTT | Message Queuing Telemetry Transport |
| NFC | Near-field Communication |
| NFV | Network Functions Virtualization |
| NIST | National Institute of Standards and Technologies |
| OBEX | OBject EXchange |
| OGC | Open Geospatial Consortium |
| OS | Operating System |
| OSI | Open System Interconnection |
| PaaS | Platform as a Service |
| PDR | Pedestrian Dead Reckoning |
| P-FP | Probabilistic FingerPrinting |
| POI | Point-of-Interest |
| PRISMA | Preferred Reporting Items for Systematic reviews and Meta-Analyses |
| QoE | Quality of Experience |
| QoS | Quality of Service |
| REST | REpresentational State Transfer |
| RF | radio frequency |
| RFID | Radio Frequency Identifier |
| RSS | Received Signal Strength |
| RSSI | Received Signal Strength Indicator |
| SaaS | Software as a Service |
| SIP | Session Initiation Protocol |
| SLA | Service Level Agreement |
| SOAP | Simple Object Access Protocol |
| SOA | Service Oriented Architecture |
| SLAM | Simultaneous Localization and Mapping |
| SSL | Secure Sockets Layer |
| SVM | Support Vector Machine |
| TCP | Transport Control Protocol |
| TDoA | Time Difference of Arrival |
| TLS | Transport Layer Security |
| ToA | Time of Arrival |
| UDP | User Datagram Protocol |
| UHF | Ultra High Frequency |
| URI | Uniform Resource Identifier |
| URLLC | Ultra-Reliable Low Latency Communications |
| UWB | UltraWideband |
| VLC | Visible Light Communication |
| VHF | Very High Frequency |
| VR | Virtual Reality |
| Wi-Fi | IEEE 802.11Wireless LAN |
| XML | Extensible Markup Language |
| XMPP | Extensible Messaging and Presence Protocol |
Appendix A. Parameters Analised

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Article | Year | Technology | Technique | Algorithm | Indoor | Outdoor | Area | Metric/Error | Protocol(S)/Interfaces | Standard |
|---|---|---|---|---|---|---|---|---|---|---|
| [39] | 2015 | RFID | N/A | ✓ | ✓ | N/A | N/A | N/A | N/A | |
| [83] | 2015 | Inertial Sensors, Camera | Fusion techniques | Filter-base (low and high-pass filter) | ✓ | ✗ | N/A | N/A | WebSocket, HTTP | N/A |
| [43] | 2015 | N/A | Range based, Range free, Fingerprinting | N/A | ✓ | ✗ | N/A | Mean error m to m | REST | ISO/ICE 18305:2016 |
| [8] | 2015 | Wi-Fi | Fingerprinting, ToA | LQI, Pompeiu-Hausdorff | ✓ | ✗ | 22.5 m2, 11 m2 and 5 m2 per point | Mean error m to m | HTTP, API | N/A |
| [40] | 2016 | Bluetooth | N/A | N/A | ✓ | ✓ | N/A | N/A | HTTP, API | Cloud-native |
| [127] | 2016 | N/A | Path planing | Multi access Point (MaP algorithms) | ✓ | ✗ | N/A | N/A | N/A | N/A |
| [110] | 2016 | Wi-Fi, RFID | Proximity | N/A | ✓ | ✗ | 32 m × 12 m and 21 m × 20 m | Accuracy 88.1% | N/A | BIM |
| [61] | 2016 | Wi-Fi | Fingerprinting | Probabilistic-Fingerprinting (P-FP) | ✓ | ✗ | N/A | N/A | N/A | N/A |
| [77] | 2016 | Bluetooth | N/A | N/A | ✓ | ✓ | N/A | N/A | REST API | OGC |
| [78] | 2016 | N/A | N/A | k-NN | ✓ | ✗ | N/A | N/A | REST API | SOA |
| [135] | 2016 | ZigBee | Multilateration | N/A | ✓ | ✗ | N/A | N/A | REST API | N/A |
| [102] | 2017 | Wi-Fi | Fingerprinting | k-NN | ✓ | ✗ | N/A | N/A | HTTPS | N/A |
| [50] | 2017 | Bluetooth | Proximity, Fingerprinting | k-NN | ✓ | ✗ | N/A | N/A | API | N/A |
| [97] | 2017 | Wi-Fi, Mobile Network | Statistical Approximation, AAL | N/A | ✓ | ✓ | N/A | N/A | LoST | Cloud-native |
| [123] | 2017 | Wi-Fi, Inertial Sensors, Bluetooth, Mobile Network | Deep Learning, Signal visualization, Scene Analysis, Triangulation | N/A | ✓ | ✓ | N/A | COEX env. Mean error 4.16 m, Store 3.54 m | N/A | N/A |
| [67] | 2017 | Wi-Fi | Probabilistic, Bayesian theory | N/A | ✓ | ✗ | 62.22 m × 10.23 m | Average error from 1 m to 2 m | N/A | N/A |
| [120] | 2017 | Bluetooth, Inertial Sensors, Mobile Network, Wi-Fi, Camera | Path planning | N/A | ✓ | ✓ | Indoor 175 m2, Outdoor 15 km, 125 m2 | 1–3 m | API | |
| [106] | 2017 | Bluetooth | N/A | N/A | ✓ | ✗ | N/A | N/A | N/A | BIM |
| [111] | 2017 | Camera, RFID | ToF | N/A | ✓ | ✓ | N/A | NA | N/A | N/A |
| [121] | 2017 | N/A | Probabilistic | Markov | ✓ | ✗ | 12 m × 12 m | N/A | N/A | N/A |
| [59] | 2017 | Camera, Inertial Sensors | Image Based, Structure from Motion (SfM) technique, Path planning | N/A | ✓ | ✓ | 150 m2 | 1 m | N/A | Cloud-native |
| [41] | 2017 | Wi-Fi, Bluetooth | Fingerprinting, ML, Trilateration | SVM | ✓ | ✗ | N/A | Average distance error 11.48 ft. | N/A | N/A |
| [136] | 2017 | N/A | ML | Genetic Algorithm | ✓ | ✓ | N/A | Accuracy > 98% | Spanish Inquisition Protocol (SIP) | N/A |
| [105] | 2018 | Bluetooth | Geometric approach, triangulation | N/A | ✓ | ✗ | N/A | N/A | N/A | N/A |
| [62] | 2018 | ZigBee, Bluetooth | Proximity, Waypoint-based navigation | N/A | ✓ | ✗ | 3 m | OBEX, BR/EDR | N/A | |
| [119] | 2018 | Bluetooth, Wi-Fi | Probabilistic | N/A | ✓ | ✗ | 8 m × 8 m and 44 m × 44 m | Maximum error 5.94% | N/A | N/A |
| [88] | 2018 | Wi-Fi | Fuzzy logic, Trilateration, Fingerprinting | Genetic algorithms | ✓ | ✗ | N/A | Mean error ≈ 2.11 m ± 0.6 m | UDP/IP and TCP/IP | N/A |
| [42] | 2018 | Bluetooth | Proximity | N/A | ✓ | ✗ | N/A | N/A | HTTP | SOA |
| [73] | 2018 | Wi-Fi, Bluetooth, RFID, Cellular | Fingerprint, Proximity | N/A | ✓ | ✓ | N/A | Mean error 4.62 m ± 0.31 m | HTTP/OpenFlow | N/A |
| [52] | 2018 | Bluetooth, Inertial Sensors | ML, image processing | Brute-Force Marching and ORB descriptors | ✓ | ✗ | N/A | N/A | HTTP, API | N/A |
| [48] | 2018 | Bluetooth | ML | k-NN, SVM | ✓ | ✓ | 64 m2 | 1 m | Web Service | Cloud-native |
| [124] | 2018 | N/A | N/A | N/A | ✓ | ✓ | N/A | N/A | N/A | N/A |
| [137] | 2018 | N/A | N/A | Hidden Markov Model | ✓ | ✗ | N/A | N/A | N/A | N/A |
| [53] | 2018 | Camera, Ultrasound | inertial Sensors | N/A | ✓ | ✗ | Accuracy > 97% | N/A | N/A | |
| [45] | 2019 | Wi-Fi | ML | Support Vector Regression | ✓ | ✗ | In a mall, 2500 m2, and 562,000 m2 | N/A | RestFUL web service API | N/A |
| [72] | 2019 | Wi-Fi, Bluetooth, ZigBee | N/A | RACIL algorithm | ✓ | ✗ | Exp. 100 m2, Real 2 m × 40 m | Simulated 0.2 m to 1.1 m, Real 0.4 m to 1.6 m | N/A | N/A |
| [103] | 2019 | Wi-Fi | ML, Fingerprinting | Multi-Objective Evolutionary Algorithm, W k-NN | ✓ | ✗ | N/A | Average error 1 m | N/A | N/A |
| [91] | 2019 | Wi-Fi, Bluetooth, | Proximity | N/A | ✓ | ✗ | N/A | N/A | TLS | N/A |
| [16] | 2019 | Bluetooth, Wi-Fi | ML | LSTM | ✓ | ✗ | 68 m × 16 m, 34 m × 16 m, 26.5 m × 16 m, 19 m × 16 m | N/A | MQTT | N/A |
| [99] | 2019 | Bluetooth, Wi-Fi, Inertial Sensors | Fingerprinting, PDR, Map Matching | Particle Filter | ✓ | ✗ | N/A | Mean error 2.34 m | N/A | N/A |
| [70] | 2019 | Wi-Fi | ML | ELM-based | ✓ | ✗ | 12 m × 6 m, 8.7 m × 55 m | 15 m | N/A | N/A |
| [64] | 2019 | Bluetooth | Proximity | N/A | ✓ | ✗ | N/A | N/A | MQTT, Mosquito | N/A |
| [85] | 2019 | Wi-Fi | Probabilistic | Motley Keenan | ✓ | ✗ | N/A | N/A | OpenFlow | N/A |
| [112] | 2019 | Wi-Fi, Inertial Sensors, Geomagnetic | Deterministic | k-NN, Dynamic Time Warping (DTW),PF (Particle Filter) | ✓ | ✗ | N/A | N/A | N/A | |
| [116] | 2019 | Light, Inertial Sensors | N/A | Peak Intensity detection, IIR, Filter, DTW | ✓ | ✗ | 1000 m2, 20,000 m2, 800 m2 | Accuracy 98% | N/A | N/A |
| [74] | 2019 | Wi-Fi | Neural Networks, Image Based | Genetic Algorithm | ✓ | ✓ | ≈ 4 km | 1 m to 5 m | MQTT | N/A |
| [95] | 2019 | Bluetooth | ML, Probabilistic, Winsorization technique | Trimmed mean | ✓ | ✓ | 10 m × 4 m, 20 m × 2 m | 1 m | MQTT, HTTP | WGS84 |
| [125] | 2019 | Wi-Fi | Triangulation | N/A | ✓ | ✗ | 120 m × 120 m | < 5.09 m | N/A | N/A |
| [76] | 2019 | UWB,Inertial Sensors,Wi-Fi | ML, Markov | N/A | ✓ | ✗ | 39 m × 18 m | Accuracy 90% | WebSocket, HTTP | N/A |
| [54] | 2019 | Wi-Fi, Inertial Sensors | Proximity | Nearest-checkpoint identification | ✓ | ✓ | N/A | N/A | HTTPS, REST API | SOA |
| [75] | 2019 | Wi-Fi | Experience-based | Heuristic algorithm, GBOMD, EBOP | ✓ | ✗ | N/A | N/A | N/A | N/A |
| [79] | 2019 | Wi-Fi | Fingerprinting | k-NN, etc. | ✓ | ✗ | N/A | N/A | REST API | N/A |
| [128] | 2019 | Wi-Fi, Inertial Sensors | N/A | Light-Weight Magnetic-Based Door Event Detection method | ✓ | ✗ | N/A | Detection accuracy 90% | N/A | N/A |
| [56] | 2019 | Wi-Fi | Fingerprinting | W k-NN | ✓ | ✗ | 42 m × 12 m | Average error 3.8 m | MQTT, HTTP | N/A |
| [58] | 2019 | Bluetooth | N/A | Bounding Box Algorithm | ✓ | ✗ | 36 m × 36 m | Average error 1.55 m | N/A | N/A |
| [82] | 2020 | Bluetooth | Proximity | N/A | ✓ | ✓ | 42.5 m2 | Mean accuracy 97.7% | API, HTTP | N/A |
| [80] | 2020 | Bluetooth | N/A | N/A | ✓ | ✓ | N/A | N/A | HTTP, Rest | N/A |
| [46] | 2020 | Bluetooth | Proximity | N/A | ✓ | ✗ | N/A | ≈2.6 m | MQTT | Cloud-native |
| [94] | 2020 | Audible Sound | ML | k-NN, SVM, Naïve Bayes (NB) | ✓ | ✗ | - | Accuracy 71% | MQTT | N/A |
| [7] | 2020 | Bluetooth | ML, Trilateration | N/A | ✓ | ✗ | 12 m × 16 m | RMSE 0.86 m | MQTT | N/A |
| [63] | 2020 | Wi-Fi | Markov model | N/A | ✓ | ✗ | N/A | N/A | N/A | N/A |
| [114] | 2020 | Camera | AR technique | N/A | ✓ | ✓ | N/A | N/A | API | N/A |
| [11] | 2020 | Camera, Ultrasound | Fuzzy logic, image processing | N/A | ✓ | ✓ | N/A | N/A | N/A | N/A |
| [13] | 2020 | ZigBee | N/A | Oriented FAST and Rotate BRIEF (ORB) algorithm | ✓ | ✗ | N/A | N/A | N/A | N/A |
| [10] | 2020 | UWB | ML, image processing | Brute-Force Marching and ORB descriptors | ✓ | ✗ | 10 m × 10 m × 3.3 m | N/A | N/A | N/A |
| [68] | 2020 | Camera | Visual-SLAM | N/A | ✓ | ✗ | N/A | Mean error ≈ 20 cm | N/A | N/A |
| [69] | 2020 | Bluetooth | ML, Proximity, Trilateration, | LSTM, RNN | ✓ | ✓ | N/A | N/A | N/A | N/A |
| [107] | 2020 | Bluetooth | ML | N/A | ✓ | ✓ | 2.50 m × 3.29 m, 2.50 m × 1.00 m, 2.34 m × 2.21 m, 5.60 m × 7.80 m, 1.60 m × 5.60 m | Average error 35.23 cm ± 11.86 cm | MQTT | N/A |
| [96] | 2020 | Wi-Fi, Bluetooth, Mobile Network | N/A | k-NN, k-d Tree | ✓ | ✓ | 1.48 km2 | N/A | WebSocket, XMPP | N/A |
| [55] | 2020 | Wi-Fi, Inertial Sensors, Bluetooth, UWB | ML | N/A | ✓ | ✓ | N/A | N/A | SSL, RestFUL API | MSA |
| [126] | 2020 | Wi-Fi | ML, Fingerprinting | Manifold Alignment algorithm | ✓ | ✗ | 68.9 ft × 52.5 ft | N/A | N/A | N/A |
| [71] | 2020 | N/A | ML, Fingerprinting | k-NN, SVM, NN, RF, MLP | ✓ | ✗ | N/A | N/A | N/A | N/A |
| [115] | 2020 | Camera | ML | DNN | ✓ | ✓ | 42 m × 37 m, 17 m × 13 m, 8 m × 5 m | 60 cm | HTTP | N/A |
| [49] | 2020 | Wi-Fi | multidimensional spatial similarity (MDSS), k-NN | N/A | ✓ | ✗ | 10 m × 10 m | Positioning error from 0.037 to 0.269 m | N/A | N/A |
| [108] | 2020 | Mobile Network | eMBB, mMTC, URLLC | N/A | ✓ | ✗ | N/A | N/A | N/A | Cloud-native |
| [138] | 2021 | Bluetooth | ML | ANN-SVM, KWNN | ✓ | ✗ | N/A | Accuracy > 91% | N/A | N/A |
| [66] | 2021 | Wi-Fi | Fingerprinting | kNN, RLAEW | ✓ | ✗ | N/A | Mean error 2.67 m | N/A | N/A |
| [139] | 2021 | Wi-Fi | Fingerprinting | Reputation Mechanism | ✓ | ✗ | N/A | N/A | N/A | N/A |
| [65] | 2021 | Wi-Fi | Fingerprinting | Dynamic Routing Algorithm of CapsNet | ✓ | ✗ | N/A | Average localization error 7.93 m | N/A | N/A |
| [12] | 2021 | Light | N/A | Visible Light Positioning algorithm | ✓ | ✗ | 3.3 m × 3.15 m | Positioning error from 3 to 6 m | HTTP | N/A |
| [140] | 2021 | Wi-Fi | N/A | classical multidimensional scaling (CMDS) | ✓ | ✗ | 2400 m2 | 80 percentil 3 m | N/A | N/A |
| [113] | 2021 | Inertial Sensors | Pattern matching technique | Dijkstra’s algorithm | ✓ | ✗ | N/A | mean error 7.39 m | HTTP, API | N/A |
| [141] | 2021 | Bluetooth | N/A | Levenber-Marquardt algorithm | ✓ | ✗ | 5 m × 5 m approx. | Mean error < 1.7m | N/A | N/A |
References
- Dabove, P.; Manzino, A.M. GPS Mass-Market Receivers for Precise Farming. In Proceedings of the IEEE/ION PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 472–477. [Google Scholar] [CrossRef] [Green Version]
- Ghazi, I.; ul Haq, I.; Maqbool, M.R.; Saud, S. GPS Based Autonomous Vehicle Navigation and Control System. In Proceedings of the 13th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 12–16 January 2016; pp. 238–244. [Google Scholar] [CrossRef]
- Nair, S.; Rodrigues, G.; Dsouza, C.; Bellary, S.; Gonsalves, V. Designing of Beach Rescue Drone Using GPS and Zigbee Technologies. In Proceedings of the 2019 International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 17–19 July 2019; pp. 1154–1158. [Google Scholar] [CrossRef]
- Guo, Y.; You, R.; Yuchen, G.; Rou, Y.; Yucheng, G.; Rou, Y. A New Approach of Location and Navigation Services System Design in Complex Indoor Scenes Based on the Android Mobile Computing Platform. In Proceedings of the 16th International Symposium on Distributed Computing and Applications to Business, Engineering and Science (DCABES), Anyang, China, 13–16 October 2017; pp. 71–75. [Google Scholar] [CrossRef]
- Khelifi, F.; Bradai, A.; Benslimane, A.; Rawat, P.; Atri, M. A Survey of Localization Systems in Internet of Things. Mobile Netw. Appl. 2019, 24, 761–785. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Cao, J.; Liu, X.; Zhang, J.; Hu, H.; Yao, D. A Self-Adaptive Bluetooth Indoor Localization System using LSTM-based Distance Estimator. In Proceedings of the 2020 29th International Conference on Computer Communications and Networks (ICCCN), Honolulu, HI, USA, 3–6 August 2020; pp. 1–9. [Google Scholar] [CrossRef]
- Lemic, F.; Handziski, V.; Wirström, N.; Van Haute, T.; De Poorter, E.; Voigt, T.; Wolisz, A. Web-based platform for evaluation of RF-based indoor localization algorithms. In Proceedings of the 2015 IEEE International Conference on Communication Workshop (ICCW), London, UK, 8–12 June 2015; pp. 834–840. [Google Scholar] [CrossRef]
- Mendoza-Silva, G.; Torres-Sospedra, J.; Huerta, J. A Meta-Review of Indoor Positioning Systems. Sensors 2019, 19, 4507. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barua, A.; Dong, C.; Al-Turjman, F.; Yang, X. Edge Computing-Based Localization Technique to Detecting Behavior of Dementia. IEEE Access 2020, 8, 82108–82119. [Google Scholar] [CrossRef]
- Silva, C.; Wimalaratne, P. Context-Aware Assistive Indoor Navigation of Visually Impaired Persons. Sens. Mater. 2020, 32, 1497. [Google Scholar] [CrossRef]
- Liu, X.; Guo, L.; Yang, H.; Wei, X. Visible Light Positioning Based on Collaborative LEDs and Edge Computing. IEEE Trans. Comput. Soc. Syst. 2021, 1–12. [Google Scholar] [CrossRef]
- Chen, J.Y.; Huang, L. Design of Elderly Care System Integrated with SLAM Algorithm. In Security with Intelligent Computing and Big-Data Services; Yang, C.N., Peng, S.L., Jain, L.C., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 503–513. [Google Scholar]
- Anandkumar, K.M.; Krishnan, A.; Deepakraj, G.; Nishanth, N. Remote Controlled Human Navigational Assistance for the Blind Using Intelligent Computing. In Proceedings of the Mediterranean Symposium on Smart City Application (SCAMS’17), Tangier, Morocco, 25–27 October 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Lu, T.T.; Liu, Y.J.; Ciou, J.J.; Lu, C.H. Feature Selection Difference Matching Method for Indoor Positioning. In Proceedings of the Second International Conference on Internet of Things, Data and Cloud Computing (ICC’17), Cambridge, UK, 22–23 March 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Pesic, S.; Tosic, M.; Iković, O.; Radovanovic, M.; Ivanovic, M.; Boscovic, D. BLEMAT: Data Analytics and Machine Learning for Smart Building Occupancy Detection and Prediction. Int. J. Artif. Intell. Tools 2019, 28, 1960005. [Google Scholar] [CrossRef]
- Yara, C.; Noriduki, Y.; Ioroi, S.; Tanaka, H. Design and Implementation of Map System for Indoor Navigation—An Example of an Application of a Platform Which Collects and Provides Indoor Positions. In Proceedings of the 2015 IEEE International Symposium on Inertial Sensors and Systems (ISISS) Proceedings, Hapuna Beach, HI, USA, 23–26 March 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Kaczmarczyk, V.; Kuchta, R.; Kuchtova, Z.; Kadlec, J.; Bastan, O. Data Processing Platform for Indoor Localization Framework. In Proceedings of the 15th IFAC Conference on Programmable Devices and Embedded Systems PDeS 2018, Ostrava, Czech Republic, 23–25 May 2018; pp. 508–513. [Google Scholar] [CrossRef]
- Shin, H.; Chon, Y.; Kim, Y.; Cha, H. A Participatory Service Platform for Indoor Location-Based Services. IEEE Pervasive Comput. 2015, 14, 62–69. [Google Scholar] [CrossRef]
- Ibrahim, F.A.M.; Hemayed, E.E. Trusted Cloud Computing Architectures for Infrastructure as a Service: Survey and Systematic Literature Review. Comput. Secur. 2019, 82, 196–226. [Google Scholar] [CrossRef]
- Simões, W.; Machado, G.; Sales, A.; Lucena, M.; Jazdi, N.; Lucena, V., Jr. A Review of Technologies and Techniques for Indoor Navigation Systems for the Visually Impaired. Sensors 2020, 20, 3935. [Google Scholar] [CrossRef]
- Brena, R.; García-Vázquez, J.; Galván Tejada, C.; Munoz, D.; Vargas-Rosales, C.; Fangmeyer, J., Jr.; Palma, A. Evolution of Indoor Positioning Technologies: A Survey. J. Sens. 2017, 2017, 2630413. [Google Scholar] [CrossRef]
- Soewito, B.; Hassyr, F.A.; Geri Arisandi, T.G. A Systematic Literature Review of Indoor Position System Accuracy and Implementation. In Proceedings of the 2018 International Conference on Applied Science and Technology (iCAST), Manado, Indonesia, 26–27 October 2018; pp. 358–362. [Google Scholar] [CrossRef]
- Kunhoth, J.; Karkar, A.; Al-ma’adeed, S.; Al-Ali, A. Indoor Positioning and Wayfinding Systems: A Survey. Hum. Cent. Comput. Inf. Sci. 2020, 10, 18. [Google Scholar] [CrossRef]
- Hameed, A.; Ahmed, H.A. Survey on Indoor Positioning Applications Based on Different Technologies. In Proceedings of the 12th International Conference on Mathematics, Actuarial Science, Computer Science and Statistics (MACS), Karachi, Pakistan, 24–25 November 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Ngamakeur, K.; Yongchareon, S.; Yu, J.; Rehman, S.U. A Survey on Device-Free Indoor Localization and Tracking in the Multi-Resident Environment. ACM Comput. Surv. 2020, 53, 1–29. [Google Scholar] [CrossRef]
- Shit, R.C.; Sharma, S.; Puthal, D.; Zomaya, A.Y. Location of Things (LoT): A Review and Taxonomy of Sensors Localization in IoT Infrastructure. IEEE Commun. Surv. Tutor. 2018, 20, 2028–2061. [Google Scholar] [CrossRef]
- Liu, W.; Cheng, Q.; Deng, Z.; Chen, H.; Fu, X.; Zheng, X.; Zheng, S.; Chen, C.; Wang, S. Survey on CSI-Based Indoor Positioning Systems and Recent Advances. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Obeidat, H.; Shuaieb, W.; Obeidat, O.; Abd-Alhameed, R. A Review of Indoor Localization Techniques and Wireless Technologies. Wirel. Pers. Commun. 2021, 119, 1–39. [Google Scholar] [CrossRef]
- Saeed, N.; Nam, H.; Al-Naffouri, T.Y.; Alouini, M. A State-of-the-Art Survey on Multidimensional Scaling-Based Localization Techniques. IEEE Commun. Surv. Tutor. 2019, 21, 3565–3583. [Google Scholar] [CrossRef] [Green Version]
- Bousdar Ahmed, D.; Díez, L.E.; Diaz, E.M.; García Domínguez, J.J. A Survey on Test and Evaluation Methodologies of Pedestrian Localization Systems. IEEE Sens. J. 2020, 20, 479–491. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. Int. J. Surg. 2021, 88, 105906. [Google Scholar] [CrossRef]
- Venters, W.; Whitley, E. A Critical Review of Cloud Computing: Researching Desires and Realities. J. Inf. Technol. 2012, 27, 179–197. [Google Scholar] [CrossRef]
- CISCO Systems. Cisco Global Cloud Index 2015–2020. Available online: https://www.cisco.com/c/dam/m/en_us/service-provider/ciscoknowledgenetwork/files/622_11_15-16-Cisco_GCI_CKN_2015-2020_AMER_EMEAR_NOV2016.pdf (accessed on 16 March 2021).
- CISCO Systems. Cisco Global Cloud Index: Forecast and Methodology, 2016–2021 White Paper. Available online: https://virtualization.network/Resources/Whitepapers/0b75cf2e-0c53-4891-918e-b542a5d364c5_white-paper-c11-738085.pdf (accessed on 16 March 2021).
- CISCO Systems. Cisco Visual Networking Index (VNI) Complete Forecast Update. Available online: https://twiki.cern.ch/twiki/pub/HEPIX/TechwatchNetwork/HtwNetworkDocuments/white-paper-c11-741490.pdf (accessed on 16 March 2021).
- CISCO Systems. Cisco Annual Internet Report (2018–2023). Available online: https://www.cisco.com/c/en/us/solutions/collateral/executive-perspectives/annual-internet-report/white-paper-c11-741490.html (accessed on 16 March 2021).
- Yousefpour, A.; Fung, C.; Nguyen, T.; Kadiyala, K.; Jalali, F.; Niakanlahiji, A.; Kong, J.; Jue, J.P. All one needs to know about fog computing and related edge computing paradigms: A complete survey. J. Syst. Archit. 2019, 98, 289–330. [Google Scholar] [CrossRef]
- Yeh, H.T.; Chen, B.; Wang, B. A City Parking Integration System Combined with Cloud Computing Technologies and Smart Mobile Devices. Eurasia J. Math. Sci. Technol. Educ. 2016, 12, 1231–1242. [Google Scholar] [CrossRef]
- Martín, D.; Lamsfus, C.; Alzua-Sorzabal, A. A cloud-based platform to develop context-aware mobile applications by domain experts. Comput. Stand. Interfaces 2016, 44, 177–184. [Google Scholar] [CrossRef]
- Liu, K.; Warade, N.; Pai, T.; Gupta, K. Location-aware smart campus security application. In Proceedings of the 2017 IEEE SmartWorld, Ubiquitous Intelligence Computing, Advanced Trusted Computed, Scalable Computing Communications, Cloud Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), San Francisco, CA, USA, 4–8 August 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Konstantopoulos, P.; Petrakis, E.G.M.; Sotiriadis, S. INaaS: Indoors navigation as a service on the cloud and smartphone application. In Proceedings of the 2018 IEEE 39th Sarnoff Symposium, Sarnoff 2018, Newark, NJ, USA, 24–25 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Haute, T.V.; Poorter, E.D.; Lemic, F.; Handziski, V.; Wirström, N.; Voigt, T.; Wolisz, A.; Moerman, I. Platform for benchmarking of RF-based indoor localization solutions. IEEE Commun. Mag. 2015, 53, 126–133. [Google Scholar] [CrossRef] [Green Version]
- ISO. Information Technology—Real Time Localization System—Test and Evaluation of Localization and Tracking Systems; Standard, International Organization for Standardization: Geneva, Switzerland, 2016. [Google Scholar]
- Álvarez, P.; Hernández, N.; Fabra, J.; Ocaña, M. A Cloud-Based Parallel System for Locating Customers in Indoor Malls. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 109–116. [Google Scholar]
- Fazio, M.; Buzachis, A.; Galletta, A.; Celesti, A.; Villari, M. A proximity-based indoor navigation system tackling the COVID-19 social distancing measures. In Proceedings of the 2020 IEEE Symposium on Computers and Communications (ISCC), Rennes, France, 7–10 July 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Sun, Y.; Peng, M.; Zhou, Y.; Huang, Y.; Mao, S. Application of Machine Learning in Wireless Networks: Key Techniques and Open Issues. IEEE Commun. Surv. Tutor. 2019, 21, 3072–3108. [Google Scholar] [CrossRef] [Green Version]
- Terán, M.; Carrillo, H.; Parra, C. WLAN-BLE Based Indoor Positioning System using Machine Learning Cloud Services. In Proceedings of the 2018 IEEE 2nd Colombian Conference on Robotics and Automation (CCRA), Barranquilla, Colombia, 1–3 November 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Jiang, N.; Dong, G.; Hu, Y.; Gao, L.; Chen, J. Toward Efficient Indoor Positioning for Cloud Services in SIoT. In Proceedings of the 2020 IEEE 13th International Conference on Cloud Computing (CLOUD), Beijing, China, 19–23 October 2020; pp. 124–132. [Google Scholar] [CrossRef]
- Flores, G.H.; Griffin, T.D.; Jadav, D. An iBeacon Training App for Indoor Fingerprinting. In Proceedings of the 5th IEEE International Conference on Mobile Cloud Computing, Services, and Engineering (MobileCloud), San Francisco, CA, USA, 6–8 April 2017; pp. 173–176. [Google Scholar] [CrossRef]
- Zhong, J.; Zhao, S.; Han, X.; Liu, Y.; Guo, K. Research on Indoor and Outdoor Positioning System for Special Population. IOP Conf. Ser. Mater. Sci. Eng. 2020, 719, 012055. [Google Scholar] [CrossRef]
- Jayakody, J.A.D.C.; Murray, I.; Hermann, J.; Lokuliyana, S.; Dunuwila, V.R. Tempcache: A Database Optimization Algorithm for Real-Time Data Handling in Indoor Spatial Environments. In Proceedings of the 13th International Conference on Computer Science Education (ICCSE), Colombo, Sri Lanka, 8–11 August 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Vamsi Krishna, B.; Aparna, K. IoT-Based Indoor Navigation Wearable System for Blind People. In Artificial Intelligence and Evolutionary Computations in Engineering Systems; Dash, S.S., Naidu, P.C.B., Bayindir, R., Das, S., Eds.; Springer: Singapore, 2018; pp. 413–421. [Google Scholar]
- Facchinetti, D.; Psaila, G.; Scandurra, P. Mobile cloud computing for indoor emergency response: The IPSOS assistant case study. J. Reliab. Intell. Environ. 2019, 5, 173–191. [Google Scholar] [CrossRef]
- Mpeis, P.; Roussel, T.; Kumar, M.; Costa, C.; LaoudiasDenis, C.; Capot-Ray, D.; Zeinalipour-Yazti, D. The Anyplace 4.0 IoT Localization Architecture. In Proceedings of the 21st IEEE International Conference on Mobile Data Management (MDM), Versailles, France, 30 June–3 July 2020; pp. 218–225. [Google Scholar] [CrossRef]
- De Nardis, L.; Caso, G.; Di Benedetto, M.G. ThingsLocate: A ThingSpeak-Based Indoor Positioning Platform for Academic Research on Location-Aware Internet of Things. Technologies 2019, 7, 50. [Google Scholar] [CrossRef] [Green Version]
- Khan, A.u.R.; Othman, M.; Madani, S.A.; Khan, S.U. A Survey of Mobile Cloud Computing Application Models. IEEE Commun. Surv. Tutor. 2014, 16, 393–413. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Zhao, Y.; Li, X.; Xu, C.Z. Ultra-Low Power Localization System Using Mobile Cloud Computing. In Cloud Computing—CLOUD 2019; Da Silva, D., Wang, Q., Zhang, L.J., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 1–10. [Google Scholar]
- Noreikis, M.; Xiao, Y.; Ylä-Jääski, A. SeeNav: Seamless and Energy-Efficient Indoor Navigation Using Augmented Reality. In Proceedings of the on Thematic Workshops of ACM Multimedia 2017 (Thematic Workshops’17), New York, NY, USA, 23–27 October 2017; pp. 186–193. [Google Scholar] [CrossRef]
- Naha, R.K.; Garg, S.; Georgakopoulos, D.; Jayaraman, P.P.; Gao, L.; Xiang, Y.; Ranjan, R. Fog Computing: Survey of Trends, Architectures, Requirements, and Research Directions. IEEE Access 2018, 6, 47980–48009. [Google Scholar] [CrossRef]
- Sciarrone, A.; Fiandrino, C.; Bisio, I.; Lavagetto, F.; Kliazovich, D.; Bouvry, P. Smart Probabilistic Fingerprinting for Indoor Localization over Fog Computing Platforms. In Proceedings of the 2016 5th IEEE International Conference on Cloud Networking (Cloudnet), Pisa, Italy, 3–5 October 2016; pp. 39–44. [Google Scholar] [CrossRef] [Green Version]
- Li, C.C.; Wu, P.; Wang, H.; Chu, E.T.H.; Liu, J.W.S. Building/environment Data/information System for Fine-Scale Indoor Location Specific Services. In Proceedings of the 2018 IEEE 2nd International Conference on Fog and Edge Computing (ICFEC), Washington, DC, USA, 1–3 May 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Li, W.; Su, Z.; Li, R.; Zhang, K.; Xu, Q. Abnormal Crowd Traffic Detection for Crowdsourced Indoor Positioning in Heterogeneous Communications Networks. IEEE Trans. Netw. Sci. Eng. 2020, 7, 2494–2505. [Google Scholar] [CrossRef]
- Battistoni, P.; Sebillo, M.; Vitiello, G. Experimenting with a Fog-computing Architecture for Indoor Navigation. In Proceedings of the 2019 Fourth International Conference on Fog and Mobile Edge Computing (FMEC), Rome, Italy, 10–13 June 2019; pp. 161–165. [Google Scholar] [CrossRef]
- Ye, Q.; Bie, H.; Li, K.C.; Fan, X.; Gong, L.; He, X.; Fang, G. EdgeLoc: A Robust and Real-time Localization System Towards Heterogeneous IoT Devices. IEEE Internet Things J. 2021, 1. [Google Scholar] [CrossRef]
- An, J.; Wang, Z.; He, X.; Gui, X.; Cheng, J.; Gui, R. Know Where You Are: A Practical Privacy-Preserving Semi-Supervised Indoor Positioning via Edge-Crowdsensing. IEEE Trans. Netw. Serv. Manag. 2021, 18, 4875–4887. [Google Scholar] [CrossRef]
- Liu, S.; Si, P.; Xu, M.; He, Y.; Zhang, Y. Edge Big Data-Enabled Low-Cost Indoor Localization Based on Bayesian Analysis of RSS. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Ben Ali, A.J.; Hashemifar, Z.S.; Dantu, K. Edge-SLAM: Edge-Assisted Visual Simultaneous Localization and Mapping. In Proceedings of the 18th International Conference on Mobile Systems, Applications, and Services, New York, NY, USA, 15–19 June 2020; pp. 325–337. [Google Scholar] [CrossRef]
- Fazio, M.; Celesti, A.; Villari, M. Improving Proximity Detection of Mesh Beacons at the Edge for Indoor and Outdoor Navigation. In Proceedings of the 2020 IEEE 25th International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Pisa, Italy, 14–16 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, Q.; Peng, X.; Jiang, X. Differential Privacy-Based Indoor Localization Privacy Protection in Edge Computing. In Proceedings of the 2019 IEEE SmartWorld, Ubiquitous Intelligence Computing, Advanced Trusted Computing, Scalable Computing Communications, Cloud Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), Leicester, UK, 19–23 August 2019; pp. 491–496. [Google Scholar] [CrossRef]
- Liu, S.; Yan, Z. Verifiable Edge Computing for Indoor Positioning. In Proceedings of the ICC 2020—2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, C.; Wang, C.; Luo, J.; He, Q. A Cooperative Indoor Localization Enhancement Framework on Edge Computing Platforms for Safety-Critical Applications. In Proceedings of the 15th International Conference on Mobile Ad-Hoc and Sensor Networks (MSN), Shenzhen, China, 11–13 December 2019; pp. 372–377. [Google Scholar] [CrossRef]
- Santa, J.; Fernandez, P.; Ortiz, J.; Sanchez-Iborra, R.; Skarmeta, A. Offloading Positioning onto Network Edge. Wirel. Commun. Mob. Comput. 2018, 2018, 13. [Google Scholar] [CrossRef]
- Horsmanheimo, S.; Lembo, S.; Tuomimaki, L.; Huilla, S.; Honkamaa, P.; Laukkanen, M.; Kemppi, P. Indoor Positioning Platform to Support 5G Location Based Services. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 14–20 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Li, W.; Chen, Z.; Gao, X.; Liu, W.; Wang, J. Multimodel Framework for Indoor Localization under Mobile Edge Computing Environment. IEEE Internet Things J. 2019, 6, 4844–4853. [Google Scholar] [CrossRef]
- Carrera, V.J.L.; Zhao, Z.; Wenger, M.; Braun, T. MEC-Based UWB Indoor Tracking System. In Proceedings of the 15th Annual Conference on Wireless On-demand Network Systems and Services (WONS), Wengen, China, 22–24 January 2019; pp. 138–145. [Google Scholar] [CrossRef]
- Thomopoulos, S.; Karafylli, C.; Karafylli, M.; Motos, D.; Lampropoulos, V.; Dimitros, K.; Margonis, C. WayGoo: A Platform for Geolocating and Managing Indoor and Outdoor Spaces. Proc. SPIE 2016, 9842, 984218. [Google Scholar] [CrossRef]
- Niu, L.; Saiki, S.; Matsumoto, S.; Nakamura, M. WIF4InL: Web-based integration framework for Indoor location. Int. J. Pervasive Comput. Commun. 2016, 12, 49–65. [Google Scholar] [CrossRef]
- Raspopoulos, M.; Paspallis, N.; Kaimakis, P. PINSPOT: An Open Platform for Intelligent Context-Based Indoor Positioning. In Proceedings of the Information Systems Development: Information Systems Beyond 2020 (ISD2019 Proceedings), Toulon, France, 28–30 August 2019. [Google Scholar]
- Suciu, G.; Balanean, C.; Pasat, A.; Istrate, C.; Ijaz, H.; Matei, R. A new concept of smart shopping platform based on IoT solutions. In Proceedings of the 2020 12th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Bucharest, Romania, 25–27 June 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Al-Fuqaha, A.; Guizani, M.; Mohammadi, M.; Aledhari, M.; Ayyash, M. Internet of Things: A Survey on Enabling Technologies, Protocols, and Applications. IEEE Commun. Surv. Tutor. 2015, 17, 2347–2376. [Google Scholar] [CrossRef]
- Sykes, E. A context-aware system using mobile applications and beacons for on-premise security environments. J. Ambient. Intell. Humaniz. Comput. 2020, 11, 5487–5511. [Google Scholar] [CrossRef]
- Nikolovski, V.; Lameski, P.; Chorbev, I. Cloud Based Patient Monitoring Platform Using Android Smartphone Sensors. Cybern. Inf. Technol. 2015, 15, 109–119. [Google Scholar] [CrossRef] [Green Version]
- Foundation, O.N. OpenFlow Switch Specification. 2012. Available online: https://opennetworking.org (accessed on 16 March 2021).
- Guo, Y.; Zhao, L.; Wang, Y.; Liu, Q.; Qiu, J. Fog-Enabled WLANs for Indoor Positioning. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Association, I.D. Object Exchange Protocol. Available online: https://www.irda.org (accessed on 16 March 2021).
- Chai, L.; Reine, R. Performance of UDP-Lite for IoT network. IOP Conf. Ser. Mater. Sci. Eng. 2019, 495, 012038. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Hsieh, C.; Liao, Y.; Yin, T. Implementation of Wearable Devices and Indoor Positioning System for a Smart Hospital Environment. In Proceedings of the 2018 International Symposium in Sensing and Instrumentation in IoT Era (ISSI), Shanghai, China, 6–7 September 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Cho, J.; Yu, J.; Oh, S.; Ryoo, J.; Song, J.; Kim, H. A Location Spoofing Attack on Indoor Positioning Systems: The Starbucks Case Study. IEEE Commun. Mag. 2017, 55, 132–137. [Google Scholar] [CrossRef]
- Ye, A.; Li, Q.; Zhang, Q.; Cheng, B. Detection of Spoofing Attacks in WLAN-Based Positioning Systems Using WiFi Hotspot Tags. IEEE Access 2020, 8, 39768–39780. [Google Scholar] [CrossRef]
- Biehl, J.; Lee, A.; Filby, G. Anchor of trust: Towards collusion-resistant trusted indoor location for enterprise and industrial use. Pers. Ubiquitous Comput. 2020, 4, 551–569. [Google Scholar] [CrossRef]
- IETF. The Transport Layer Security (TLS) Protocol Version 1.2. Available online: https://www.rfc-editor.org/info/rfc5246 (accessed on 16 March 2021).
- Banks, A.; Briggs, E.; Borgendale, K.; Gupta, R. MQTT Version 5.0. Available online: https://docs.oasis-open.org (accessed on 16 March 2021).
- Navya, C.; Salvi, S.; Jacob, N.D.; Kumar, S. A ROOF Computing Architecture based Indoor Positioning System for IoT Applications. In Proceedings of the 2020 Fourth International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud) (I-SMAC), Palladam, India, 7–9 October 2020; pp. 19–24. [Google Scholar] [CrossRef]
- Chatzimichail, A.; Chatzigeorgiou, C.; Tsanousa, A.; Ntioudis, D.; Meditskos, G.; Andritsopoulos, F.; Karaberi, C.; Kasnesis, P.; Kogias, D.; Gorgogetas, G.; et al. Internet of Things Infrastructure for Security and Safety in Public Places. Information 2019, 10, 333. [Google Scholar] [CrossRef] [Green Version]
- Kulshrestha, T.; Saxena, D.; Niyogi, R.; Cao, J. Real-Time Crowd Monitoring Using Seamless Indoor-Outdoor Localization. IEEE Trans. Mob. Comput. 2020, 19, 664–679. [Google Scholar] [CrossRef]
- Nikoloudakis, Y.; Markakis, E.; Mastorakis, G.; Pallis, E.; Skianis, C. An NF V-powered emergency system for smart enhanced living environments. In Proceedings of the 2017 IEEE Conference on Network Function Virtualization and Software Defined Networks (NFV-SDN), Berlin, Germany, 6–8 November 2017; pp. 258–263. [Google Scholar] [CrossRef]
- IETF. LoST: A Location-to-Service Translation Protocol. Available online: https://datatracker.ietf.org/doc/html/rfc5222 (accessed on 16 March 2021).
- Berkovich, G.; Churikov, D.; Georgy, J.; Goodall, C. Coursa Venue: Indoor Navigation Platform Using Fusion of Inertial Sensors with Magnetic and Radio Fingerprinting. In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; pp. 1–6. [Google Scholar]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Alhadhrami, S.; Al-Ammar, M.; Al-Khalifa, H. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Xiao, J.; Zhou, Z.; Yi, Y.; Ni, L.M. A Survey on Wireless Indoor Localization from the Device Perspective. ACM Comput. Surv. 2017, 49, 1–31. [Google Scholar] [CrossRef]
- Sadegh, S.M.J.; Shahidi, S.; Valaee, S. An efficient database management for cloud-based indoor positioning using Wi-Fi fingerprinting. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Pericleous, S.; Konstantinidis, A.; Demetriades, A. A Multi-Objective Indoor Localization Service for Smartphones. In Proceedings of the 34th ACM/SIGAPP Symposium on Applied Computing (SAC’19), New York, NY, USA, 8–12 April 2019; pp. 1174–1181. [Google Scholar] [CrossRef]
- Bluetooth. Bluetooth 5 Go Faster. Go Further. Available online: https://www.bluetooth.com (accessed on 16 March 2021).
- Chen, W.; Chen, L.; Chang, W.; Tang, J. An IoT-based elderly behavioral difference warning system. In Proceedings of the 2018 IEEE International Conference on Applied System Invention (ICASI), Chiba, Japan, 13–17 April 2018; pp. 308–309. [Google Scholar] [CrossRef]
- Teizer, J.; Wolf, M.; Golovina, O.; Perschewsk, M.; Propach, M.; Neges, H.M.; König, M. Internet of Things (IoT) for Integrating Environmental and Localization Data in Building Information Modeling (BIM). In Proceedings of the 34rd ISARC, Taipei, Taiwan, 28 June –1 July 2017; pp. 603–609. [Google Scholar] [CrossRef] [Green Version]
- Marin, I.; Bocicor, M.I.; Molnar, A.J. Indoor Localization Techniques Within a Home Monitoring Platform. In Evaluation of Novel Approaches to Software Engineering; Damiani, E., Spanoudakis, G., Maciaszek, L.A., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 378–401. [Google Scholar]
- Blefari-Melazzi, N.; Bartoletti, S.; Chiaraviglio, L.; Morselli, F.; Baena, E.; Bernini, G.; Giustiniano, D.; Hunukumbure, M.; Solmaz, G.; Tsagkaris, K. LOCUS: Localization and analytics on-demand embedded in the 5G ecosystem. In Proceedings of the 2020 European Conference on Networks and Communications (EuCNC), Dubrovnik, Croatia, 15–18 June 2020; pp. 170–175. [Google Scholar] [CrossRef]
- Jechlitschek, C. A Survey Paper on Radio Frequency Identification (RFID) Trends. Available online: https://www.researchgate.net (accessed on 16 March 2021).
- Fang, Y.; Cho, Y.K.; Zhang, S.; Perez, E. Case Study of BIM and Cloud-Enabled Real-Time RFID Indoor Localization for Construction Management Applications. J. Constr. Eng. Manag. 2016, 142, 05016003. [Google Scholar] [CrossRef]
- Datt, S.; Senapathi, M.; Mirza, F. IO Vision—An Integrated System to Support the Visually Impaired. ACIS 2017 Proc. 2017, 18. Available online: https://aisel.aisnet.org/acis2017/18/ (accessed on 16 March 2021).
- Liu, D.; Guo, S.; Yang, Y.; Shi, Y.; Chen, M. Geomagnetism-Based Indoor Navigation by Offloading Strategy in NB-IoT. IEEE Internet Things J. 2019, 6, 4074–4084. [Google Scholar] [CrossRef]
- Štancel, M.; Hurtuk, J.; Hulič, M.; Červeňák, J. Indoor Atlas Service as a Tool for Building an Interior Navigation System. Acta Polytech. Hung. 2021, 18, 87–110. [Google Scholar] [CrossRef]
- Keerthana, R.; Priyadarshini, G.; Vasudevan, S.; Shree, H.; Venkatachalam, K. An intelligent and interactive AR-based location identifier for indoor navigation. Int. J. Adv. Intell. Paradig. 2020, 15, 32. [Google Scholar] [CrossRef]
- Zhao, W.; Xu, L.; Qi, B.; Hu, J.; Wang, T.; Runge, T. Vivid: Augmenting Vision-Based Indoor Navigation System With Edge Computing. IEEE Access 2020, 8, 42909–42923. [Google Scholar] [CrossRef]
- Liu, W.; Jiang, H.; Jiang, G.; Liu, J.; Ma, X.; Jia, Y.; Xiao, F. Indoor Navigation With Virtual Graph Representation: Exploiting Peak Intensities of Unmodulated Luminaries. IEEE/ACM Trans. Netw. 2019, 27, 187–200. [Google Scholar] [CrossRef]
- Qadir, Q.M.; Rashid, T.A.; Al-Salihi, N.K.; Ismael, B.; Kist, A.A.; Zhang, Z. Low Power Wide Area Networks: A Survey of Enabling Technologies, Applications and Interoperability Needs. IEEE Access 2018, 6, 77454–77473. [Google Scholar] [CrossRef]
- Sendra, S.; Garcia-Pineda, M.; Turro, C.; Lloret, J. WLAN IEEE 802.11 a/b/g/n indoor coverage and interference performance study. Int. J. Adv. Netw. Serv. 2011, 4, 209–222. [Google Scholar]
- Cao, T.; Xue, T.; Hong, L.; Zhou, H.; Song, Y. Generation of an Indoor 2D Map and Track Encryption Based on Mobile Crowdsourcing. Int. J. Eng. Technol. (UAE) 2018, 7, 4–19. [Google Scholar] [CrossRef]
- Rodriguez-Sanchez, M.; Martinez-Romo, J. GAWA—Manager for accessibility Wayfinding apps. Int. J. Inf. Manag. 2017, 37, 505–519. [Google Scholar] [CrossRef]
- Sujin, C.; Govardhanan, K.; Ma, M. Markovian model based indoor location tracking for Internet of Things (IoT) applications. Clust. Comput. 2019, 22, 11805–11812. [Google Scholar] [CrossRef]
- Sithole, G.; Zlatanova, S. Position, location, place and area: An indoor perspective. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 89–96. [Google Scholar] [CrossRef] [Green Version]
- Yi, C.; Choi, W.; Liu, L.; Jeon, Y. Cloud-Based Positioning Method with Visualized Signal Images. In Proceedings of the 2017 IEEE 10th International Conference on Cloud Computing (CLOUD), Honololu, HI, USA, 25–30 June 2017; pp. 122–129. [Google Scholar] [CrossRef]
- Cho, E.; Park, S.; Rew, J.; Park, C.; Lee, S.; Park, Y. Towards a Sustainable Open Platform for Location Intelligence and Convergence. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 17–19 October 2018; pp. 1411–1413. [Google Scholar] [CrossRef]
- Tsai, M.; Luo, J.; Yang, M.; Lo, N. Location Tracking and Forensic Analysis of Criminal Suspects’ Footprints. In Proceedings of the 2019 IEEE 2nd International Conference on Information and Computer Technologies (ICICT), Kahului, HI, USA, 14–17 March 2019; pp. 210–214. [Google Scholar] [CrossRef]
- Khaliq, Z.; Mirdita, P.; Refaey, A.; Wang, X. Unsupervised Manifold Alignment for Wifi RSSI Indoor Localization. In Proceedings of the 2020 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), London, ON, Canada, 30 August–2 September 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Li, Y.; Park, J.H.; Shin, B.S. A shortest path planning algorithm for cloud computing environment based on multi-access point topology analysis for complex indoor spaces. J. Supercomput. 2017, 73, 2867–2880. [Google Scholar] [CrossRef]
- Gong, L.; Zhao, Y.; Xiang, C.; Li, Z.; Qian, C.; Yang, P. Robust Light-Weight Magnetic-Based Door Event Detection with Smartphones. IEEE Trans. Mob. Comput. 2019, 18, 2631–2646. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, C.; Jiang, Q. Security Algorithm of Internet of Things Based on ZigBee Protocol. Cluster Comput. 2019, 22, 14759–14766. [Google Scholar] [CrossRef]
- Li, K.; Zlatanova, S.; Torres-Sospedra, J.; Perez-Navarro, A.; Laoudias, C.; Moreira, A. Survey on Indoor Map Standards and Formats. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Potortì, F.; Crivello, A.; Barsocchi, P.; Palumbo, F. Evaluation of Indoor Localisation Systems: Comments on the ISO/IEC 18305 Standard. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Furfari, F.; Crivello, A.; Barsocchi, P.; Palumbo, F.; Potortì, F. What is next for Indoor Localisation? Taxonomy, protocols, and patterns for advanced Location Based Services. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–8. [Google Scholar] [CrossRef]
- ISO. ISO/IEC/IEEE International Standard—Software, Systems and Enterprise—Architecture Processes. In ISO/IEC/IEEE 42020:2019(E). 19 July 2019. pp. 1–126. Available online: https://ieeexplore.ieee.org/document/8767004 (accessed on 16 March 2021).
- Pietrantuono, R.; Russo, S.; Guerriero, A. Run-Time Reliability Estimation of Microservice Architectures. In Proceedings of the 2018 IEEE 29th International Symposium on Software Reliability Engineering (ISSRE), Memphis, TN, USA, 15–18 October 2018; pp. 25–35. [Google Scholar] [CrossRef]
- Atabekov, A.; He, J.; Bobbie, P.O. Internet of Things-Based Framework to Facilitate Indoor Localization Education. In Proceedings of the 2016 IEEE 40th Annual Computer Software and Applications Conference (COMPSAC), Atlanta, GA, USA, 10–14 June 2016; pp. 269–274. [Google Scholar] [CrossRef]
- Bhargava, K.; Ivanov, S. A fog computing approach for localization in WSN. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Li, W.; Zhang, K.; Su, Z.; Lu, R.; Wang, Y. Anomalous Path Detection for Spatial Crowdsourcing-Based Indoor Navigation System. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Hu, Q.; Wu, F.; Wong, R.; Millham, R.; Fiaidhi, J. A novel indoor localization system using machine learning based on bluetooth low energy with cloud computing. Computing 2021, 1–27. [Google Scholar] [CrossRef]
- Xie, L.; Luan, H.T.; Su, Z.; Xu, Q.; Chen, N. A Game Theoretical Approach for Secure Crowdsourcing-Based Indoor Navigation System with Reputation Mechanism. IEEE Internet Things J. 2021, 1. [Google Scholar] [CrossRef]
- Jiang, H.; Liu, W.; Jiang, G.; Jia, Y.; Liu, X.; Lui, Z.; Liao, X.; Xing, J.; Liu, D. Fly-Navi: A Novel Indoor Navigation System With On-the-Fly Map Generation. IEEE Trans. Mob. Comput. 2021, 20, 2820–2834. [Google Scholar] [CrossRef]
- Marin, I.; Molnar, A.J. Evaluation of Indoor Localisation and Heart Rate Evolution. In Computational Science and Its Applications—ICCSA 2021; Gervasi, O., Murgante, B., Misra, S., Garau, C., Blečić, I., Taniar, D., Apduhan, B.O., Rocha, A.M.A.C., Tarantino, E., Torre, C.M., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 75–89. [Google Scholar]




| Approach | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Article | Year | Applications | Technologies | Techniques | Methods | Cloud-Based | Device-Based | Standards | Protocols |
| [22] | 2017 | ✗ | ✓ | ✓ | ✓ | ✗ | ✓ | ✗ | ✗ |
| [27] | 2018 | ✓ | ✓ | ✓ | ✓ | ✵ | ✓ | ✗ | ✗ |
| [25] | 2018 | ✓ | ✓ | ✗ | ✗ | ✗ | ✓ | ✗ | ✗ |
| [23] | 2018 | ✗ | ✓ | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| [5] | 2019 | ✓ | ✓ | ✓ | ✓ | ✵ | ✓ | ✗ | ✗ |
| [9] | 2019 | ✗ | ✓ | ✓ | ✓ | ✗ | ✓ | ✗ | ✗ |
| [6] | 2019 | ✓ | ✓ | ✓ | ✓ | ✵ | ✓ | ✗ | ✓ |
| [30] | 2019 | ✓ | ✓ | ✓ | ✓ | ✗ | ✓ | ✗ | ✗ |
| [28] | 2019 | ✗ | ✗ | ✓ | ✓ | ✗ | ✓ | ✗ | ✗ |
| [24] | 2020 | ✓ | ✓ | ✓ | ✓ | ✗ | ✓ | ✗ | ✗ |
| [21] | 2020 | ✓ | ✓ | ✓ | ✓ | ✗ | ✓ | ✗ | ✗ |
| [26] | 2020 | ✓ | ✓ | ✓ | ✓ | ✗ | ✗ | ✗ | ✗ |
| [29] | 2021 | ✓ | ✓ | ✓ | ✓ | ✗ | ✓ | ✗ | ✗ |
| our review | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Keyword Infrastructure | Keywords Environment | Keywords System |
|---|---|---|
| Cloud Computing | Indoor * | Position * |
| Edge Computing | Location | |
| Fog Computing | Localisation | |
| MIST Computing | ||
| Platform |
| Group | Technology/Feature | Max. Range | Accuracy * | Power Cons. |
|---|---|---|---|---|
| Cellular [117] | 500 m–80 km a | <50 m [9] | Moderate-low | |
| Wi-Fi [118] | < 100 m b | average > 1 m [67,88,103] | Moderate | |
| Bluetooth [7,58,104] | v2.1–4.0 → 100 m, v5.0 → 400 m | average > 1.5 m [46,58] | Low | |
| RF | UWB [9] | 10–20 m | median < 50 cm [9] | Low |
| Zigbee [117] | 100 m | median < 5 m [9] | Low | |
| RFID | 200 m | median < 3 m [110] | Low | |
| Optical | Light | - | - | Low |
| Vision | Camera | - | average ≈ 20 cm [68] | High |
| Sound | Ultrasound [6] | <20 m | median < 10 cm [9] | Low |
| Audible Sound | - | - | Low | |
| Inertial sensors | Gyroscope, accelerometer, etc. | - | <5 m [110] c | Low |
| Magnetic Field | - | - | median < 5 m [9] | Low |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quezada-Gaibor, D.; Torres-Sospedra, J.; Nurmi, J.; Koucheryavy, Y.; Huerta, J. Cloud Platforms for Context-Adaptive Positioning and Localisation in GNSS-Denied Scenarios—A Systematic Review. Sensors 2022, 22, 110. https://doi.org/10.3390/s22010110
Quezada-Gaibor D, Torres-Sospedra J, Nurmi J, Koucheryavy Y, Huerta J. Cloud Platforms for Context-Adaptive Positioning and Localisation in GNSS-Denied Scenarios—A Systematic Review. Sensors. 2022; 22(1):110. https://doi.org/10.3390/s22010110
Chicago/Turabian StyleQuezada-Gaibor, Darwin, Joaquín Torres-Sospedra, Jari Nurmi, Yevgeni Koucheryavy, and Joaquín Huerta. 2022. "Cloud Platforms for Context-Adaptive Positioning and Localisation in GNSS-Denied Scenarios—A Systematic Review" Sensors 22, no. 1: 110. https://doi.org/10.3390/s22010110
APA StyleQuezada-Gaibor, D., Torres-Sospedra, J., Nurmi, J., Koucheryavy, Y., & Huerta, J. (2022). Cloud Platforms for Context-Adaptive Positioning and Localisation in GNSS-Denied Scenarios—A Systematic Review. Sensors, 22(1), 110. https://doi.org/10.3390/s22010110