1. Introduction
When data are not taken and properly used, resources are often misused. Water is a limited resource whose use in agriculture has to be sustainable. The abuse of fertilizers is threatening the environment at a global scale. Tributaries and streams throughout the Mississippi river basin, for instance, are suffering from an overload of nutrients due to excessive use of fertilizers [
1], and, in Valencia (Spain), the water pumped from some irrigation wells has such a high concentration of nitrate that agronomists advise against the use of fertilizers containing nitrogen; by taking soil and water data before fertilizing, soil health deterioration can be avoided in the long run. At present, there is a need for management practices that prioritize long-term sustainability over short-term profit, and, in this context, decisions driven by consistent data coming from proximal sensing may contribute to attain a circular economy if nutrients and fertilizers are applied only as needed [
2] in a regenerative agriculture where no waste goes to the soil and aquifers. The reputation of a wine over time relies on the reproducibility of grape properties season after season, which is favored by the systematic acquisition of objective data. For wine makers, the availability of practical tools allowing the methodical recording of field data sets the basis for reaching long-term profit and financial stability over maximum earnings in a single vintage. This financial stability is key for assuring economical sustainability, whereas the systematic monitoring of water status allows the rational use of irrigation water, which leads to environmental sustainability, the two pillars upon which data-driven agriculture is founded.
Despite the multiple benefits brought by data-driven agriculture, its practical implementation has been undermined by the difficulty of getting consistent data at the right periodicity, with the necessary precision, and with a minimum spatial resolution (data points per square meter) to apply statistics, geostatistics, and artificial intelligence techniques. As a result, invasive sampling is still the most extended technique today to extract information about the fundamental parameters involved in crop growth and fruit development. Typical invasive measurements include the hydric status where leaves are removed from the plants and introduced in a pressure chamber; nutritional status where several leaves are removed, packed, and sent to a specialized chemistry lab; and pest infestation counting where traps or leaves are sent to the entomology laboratory for insect counting and identification [
3]. For all these examples, the mere choosing of the leaves for canopy sampling is already introducing subjectivity to the measuring process before it starts. In addition, their applicability to monitor fields in a regular basis is unfeasible due to the large number of samples required for a meaningful representation. This fact, unfortunately, prevents the systematic use of these techniques at a large scale for cost-efficiency reasons. Sampling every meter along each row of an orchard, and with a row spacing of 4 m, for instance, would yield 2500 measurements per hectare. If we further assume that each measurement takes 1 min including displacements between adjacent points, and an average labor cost of 15 €/h, every map would cost 625 €/ha. When several monitoring sessions are needed each season, the costs and logistics invested become mostly unfeasible for the average grower.
Unlike invasive measurements, non-invasive techniques allow the retrieval of data without establishing physical contact between the measuring device and the targeted material. In addition to avoid the destruction of leaves or fruits, their main advantage is the speed at which data can be taken, further enhanced by scouting vehicles. However, not all relevant parameters are measurable non-invasively; most berry components, for example, cannot be determined without interfering with the fruits. Non-invasive techniques may be classified as remote sensing techniques mostly related to satellite imagery or unmanned aerial vehicles, and proximal sensing techniques based on either hand-held sensors or onboard sensors that can work at a given separation distance, and therefore enable on-the-fly monitoring. Hand-held sensors have the advantage of allowing a rapid assessment of crop parameters, which is an important step forward with respect to wet chemistry determinations that typically require long processing times. In addition to the high purchasing cost that some of them have, their main disadvantage is the need to be very close to the target, sometimes even touching it, which excludes the possibility of making measurements from moving vehicles without having to stop to approximate the sensor to the target. On top of this, some hand-held devices can weight several kilograms and are physically demanding after hours of monitoring work in the field. Nevertheless, light cost-effective hand-held sensors are resourceful for a quick isolated assessment, but not for systematic monitoring and mapping. Airborne monitoring, on the other hand, has been helpful for staple crops such as corn, wheat, or soybeans, which are typically produced over large extensions where the entire terrain is covered by the crop. Specialty crops, by contrast, pose three fundamental challenges to regular monitoring: first, trees are separated and outlined in rows, leaving large portions of soil uncovered that complicate the treatment of aerial images and the association of data to specific trees [
4]. Second, most of the yield is borne inside the canopy or in medium-low heights, being most of the fruits not accessible from zenithal views. Third, very few specialty crops are ready for mechanical harvesting [
5], and when available, there are no real-time yield monitors to track the spatial distribution of production, and thus apply precision farming tools. Nevertheless, the arrangement of trees in vertical trellises, such that conventional spherical canopies are conformed into continuous walls that highly reduce fruit occlusion and facilitate the navigation of vehicles, has meant a critical step forward to the applicability of precision agriculture (PA) to orchards. These supporting structures were first implemented in vineyards for wine production but are currently being adopted by other high-value crops such as olive trees, almonds, cherries, and apples [
4]. The combination of proximal sensing, ground vehicles, vertical trellises, and massive data is opening a wide offer of opportunities never seen before for digitalizing agriculture [
3].
Proximal sensing from ground vehicles facilitates the systematic acquisition of massive field data, especially in the case of specialty crops and orchard production, but, before gathering all these data, it is important to determine what can actually be measured, and its relationship to relevant agronomical parameters that are essential for a sustainable production. The change of light reflectance with plant vigor, water content, and other factors determined by chemical and morphological characteristics of the surface of leaves, leads to the development of vegetation indices as a practical quantification tool for the status of vegetation [
6]. Water stress can be assessed by thermal infrared reflectance associated to canopy temperature, which tends to rise when there is a deficiency in water content as a consequence of the closure of leaf stomata to avoid further evapotranspiration [
7]. The thermal infrared emission follows the blackbody radiation law, and thus allows its association to leaf temperature, providing an indirect estimation of hydric stress since stomata dynamics regulates transpiration rates [
7,
8]. Unfortunately, the popular index CWSI (Crop Water Stress Index) poses many difficulties for sensing from a moving vehicle, as locally referenced temperatures for stressed and unstressed leaves are necessary [
9]. As a result, water status has mostly been measured from hand-held radiometers [
10]. The nutritional status of plants can sometimes be noticed by visual patterns and color changes in the leaves, but these visible changes are typically identified when the imbalance of a specific nutrient has already caused a significant damage to the plant. NDVI (Normalized Difference Vegetation Index) has been the universal index used to monitor nitrogen content in the leaves of staple crops and vigor in vineyards, with both hand-held devices and on-vehicle sensors including aerial platforms. This index is the ratio of the difference between red and NIR reflectance divided by their sum, and can range between −1 and 1, with negative values associated to non-vegetal surfaces such as water, and typical values for vegetation between 0.1 and 0.9, with higher values for thicker canopies. Although vigor and growth are related to the nutritional status, there is no well-established correlation that allows the direct assessment of nitrogen uptake in leaves with the NDVI. In fact, other complementary indices have been proposed to bring some light to the non-invasive estimation of the nutritional state in plants and trees. However, the real time calculation of alternative indices requires spectral profiles at several bands, which is currently attainable with hyperspectral imaging, not quite ready yet for field cost-effective applications. Several such indices have been related to the chlorophyll content in the leaves. In particular, CI (Chlorophyll Index) is strongly linked to leaf chlorophyll concentration [
11] and TGI (Triangular Greenness Index) combines the spectral features of chlorophyll related to reflectance at 670, 550, and 480 nm [
12]. In general, during fruit maturation processes, the level of pigments and sugars increases while the acidity diminishes. The current approach to track ripening, and therefore determining harvesting readiness, is by sampling in the field and analyzing fruit properties as sugar and acidity with laboratory equipment.
Many growers find dire difficulties to deal with large amounts of data, often packed in unfriendly formats. Even when service companies process data to deliver more elaborated information to end-users, farmers are seldom provided with decision-making information regarding the actual needs of the monitored field. The underlying reason for this roots in the fact that there are multiple and subtle correlations among hydric stress, nutritional status, ripeness, weather conditions, soil properties, and other factors that influence the quantity and quality of yield in short and long terms [
6,
7,
8,
9,
10,
11,
12]. As a result, there is a need for moving forward from mere monitoring of crop conditions to decision-making support, and, for such a leap forward, it will be necessary to gather massive amounts of data and implement robust AI-based techniques capable of extracting relevant information for the growers [
3]. In other words, what most field managers and fruit growers probably need is a set of recommendation engines capable of digesting complex and massive field data to eventually deliver straightforward operational actions. Algorithms transform data into relevant recommendations by finding, calculating, and ranking the most interesting correlations for users [
13]. Regression techniques use data to predict outcomes; in contrast, recommendation algorithms sort outcomes into discrete categories such as classes or zones. Data-driven approaches need both, as the combination of classification with regression leads to predictive personalization [
13]. Personalization, indeed, is essential for decision-making in agricultural fields, where site-specific climatic or terrain traits may impact the interpretation of data. In the wine world, for instance, this is particularly known as the terroir.
The majority of recommending algorithms draw their power from the optimal fit between statistics and machine learning (ML). Given that grower knowledge based on field experience is required to train the system in such a complex scenario as crop growth and fruit bearing, supervised machine learning techniques or those based on rewards will provide an initial modeling scenario, but unsupervised learning will be resourceful once this grower knowledge is well coded into accessible parameters, as in the clustering technique described in the results Section. Supervised learning requires an input and an output to learn a mapping from the input to the output; unsupervised learning, on the contrary, has no predefined output and only the input data are available. The aim of the latter is thus finding the regularities in the input, as for instance when clustering to find groupings of input [
14]. Unsupervised learning is attractive because, once programmed, it does not require further training. Supervised ML, however, requires deciding the size of the training set, which typically influences results. The need of a vast dataset may threaten the viability of the solution. Fortunately, that is not always the case. In a semi-self-supervised ML system to detect oranges as an intermediate stage for autonomous harvesting, an acceptable solution was reached with only 110 labeled images [
15]. At the time of designing a PA-oriented recommendation engine, the first question to address is what type of actuation the algorithm is capable of recommending, out of the many operations related to crop production. The output can be as wide as finding the optimal crop (out of 10) for given soil properties (depth, texture, pH, color, drainage, etc.), a problem faced in India to increase productivity by improving net yield rate [
16]. However, a much more common need is to seek advice on regular operations that affect the majority of crops several times per season: irrigation and pest control. The former case has been tackled by a decision support system (DSS) to determine variable rate irrigation in corn [
17]. Despite their advantages for sustainability, there has been a limited adoption of variable rate irrigation systems, and, according to these researchers, one potential reason for that is the lack of science-based information. This DSS recommends the amount of water applied by a pivot in four treatments, based upon the dynamic calculation of the crop water stress index (CWSI). In a similar fashion, the latter case was attempted with a DSS designed for pesticide application—dosage and method—to fight sunn pest (
Eurygaster integriceps) in wheat and barley [
18], a knowledge-based system that integrated farmer experience in a logic that considers plant growth stage, plant variety, irrigated or dry farming, damage type (leaf, stem, and ear), and the phenology of sunn pest. These knowledge-based approaches present important advantages to other unsupervised recommendation engines. On the one hand, they can avoid cold start issues, and, on the other hand, they can be easily designed to elude wild recommendations. However, they tend to be data-demanding, and, although currently available field data are, arguably, not close to big-data standards, massive data acquisition is today achievable and prone to feed on-vehicle expert systems and recommendation engines. This article proposes a generic architecture for scouting ground robots capable of registering massive field data, and presents a use-case focused on differential grape harvesting for elaborating two distinct wines from the same vineyard plot.
3. Results
This section describes the results of applying the sensing architecture proposed above to a use case: canopy monitoring in vineyards with a terrestrial robot. A commercial vineyard located in Junqueira, Portugal, was continuously monitored between 2017 and 2020 under the EU-funded research project VineScout. The vineyard belongs to the winery Symington Family Estates and has historically produced two distinct wines from the monitored plot. The main sorting parameter has been the degree of hydric status stood by the grapevines, being plants under higher stress levels the ones producing the higher quality wine or, more appropriately, the most-valued wine by customers. The goal of this use case is to determine how the monitored area can be systematically divided into two distinct harvesting zones according to high-resolution crop data. As expected, there are various approaches to sort the field out, from the many-season experience by field managers and oenologist, to NDVI aerial images captured by a drone in a yearly basis, to a complete multivariate analysis processing data from many maps recorded along each season and at different time of the day [
24]. In this particular case, to keep the example within a reasonable extension for the scope of this study, we focus on two parameters that have been traditionally related to the hydric state of grapevines: (1) the estimation of vigor from vegetation index NDVI; and (2) the difference between canopy and air temperature (∆T).
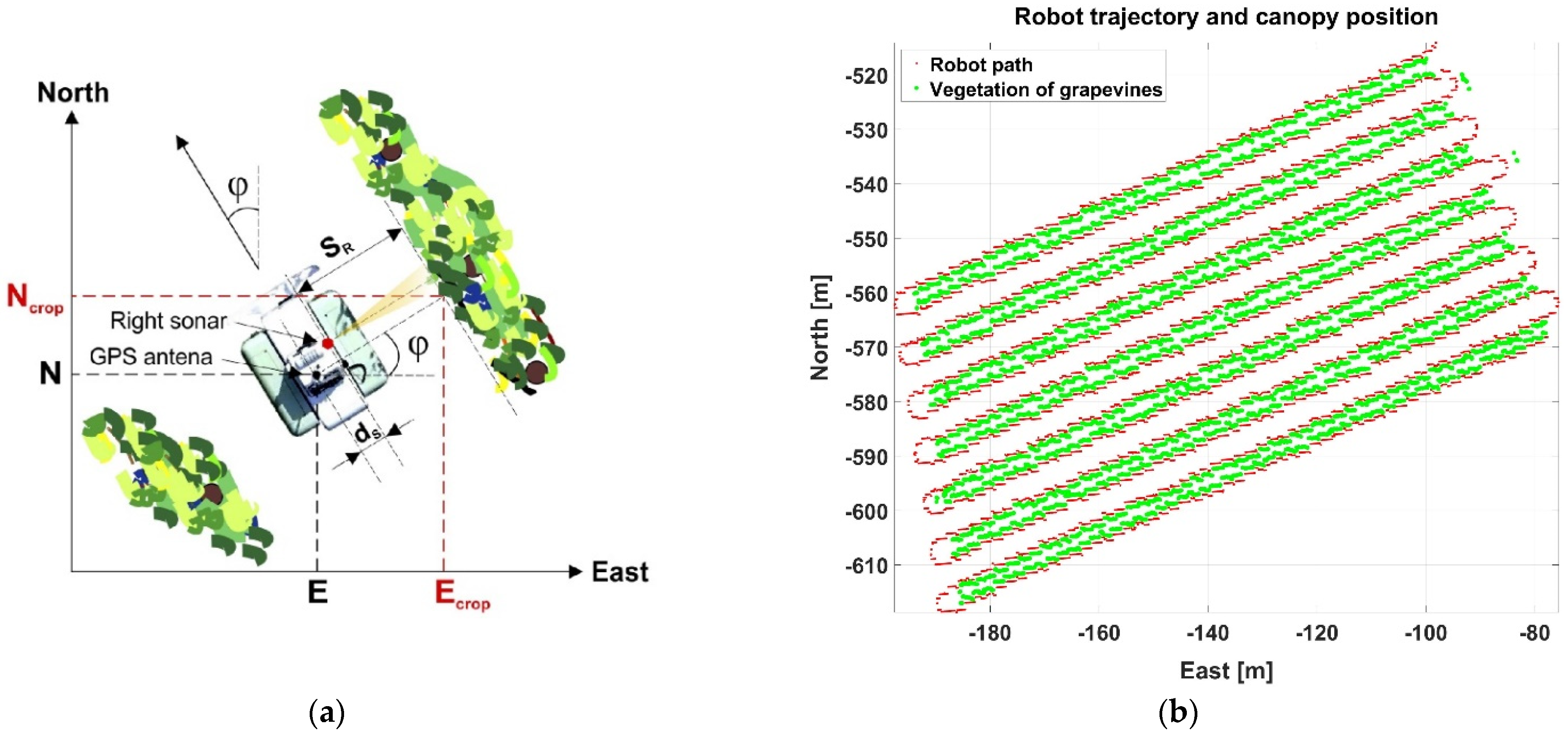
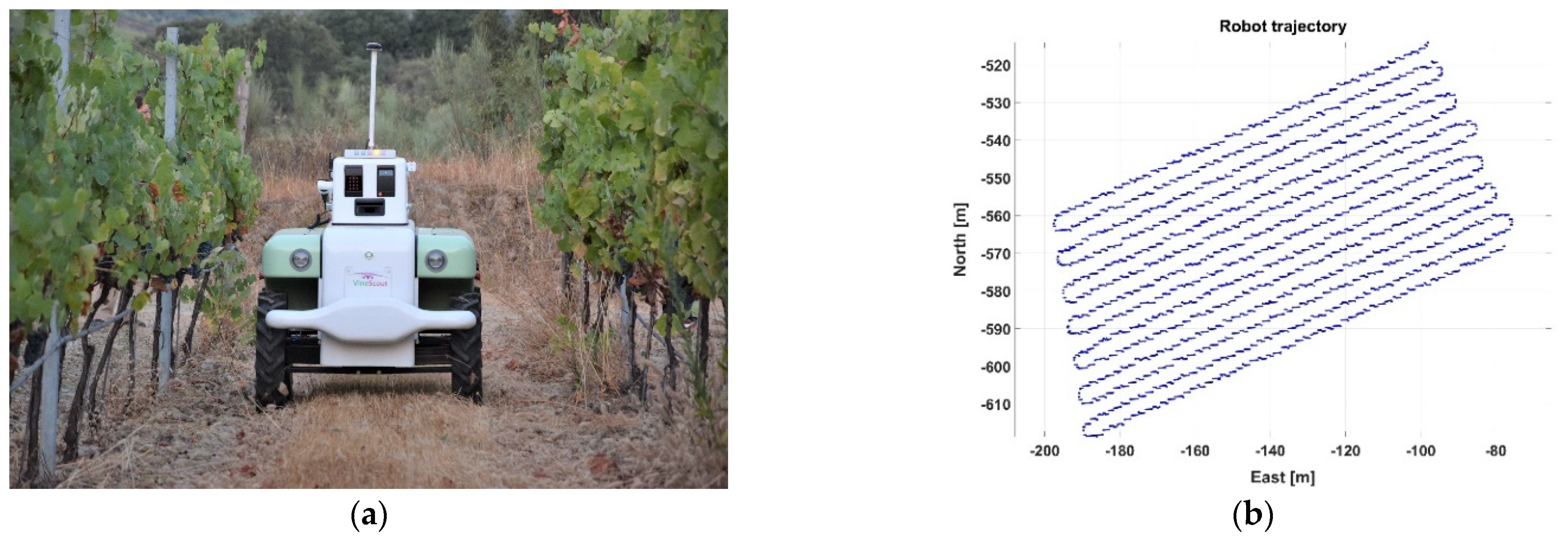
In order for the computer recommender to divide the vineyard plot into two distinct harvesting zones, and according to the approach proposed, massive data are needed as the source of knowledge for decision making. The acquisition of proximal sensing data was automated by means of the VineScout robot, whose last version (VS-3) is portrayed in
Figure 7a. The trajectory followed by the robot in the generation of Map C (
Table 1) is depicted in
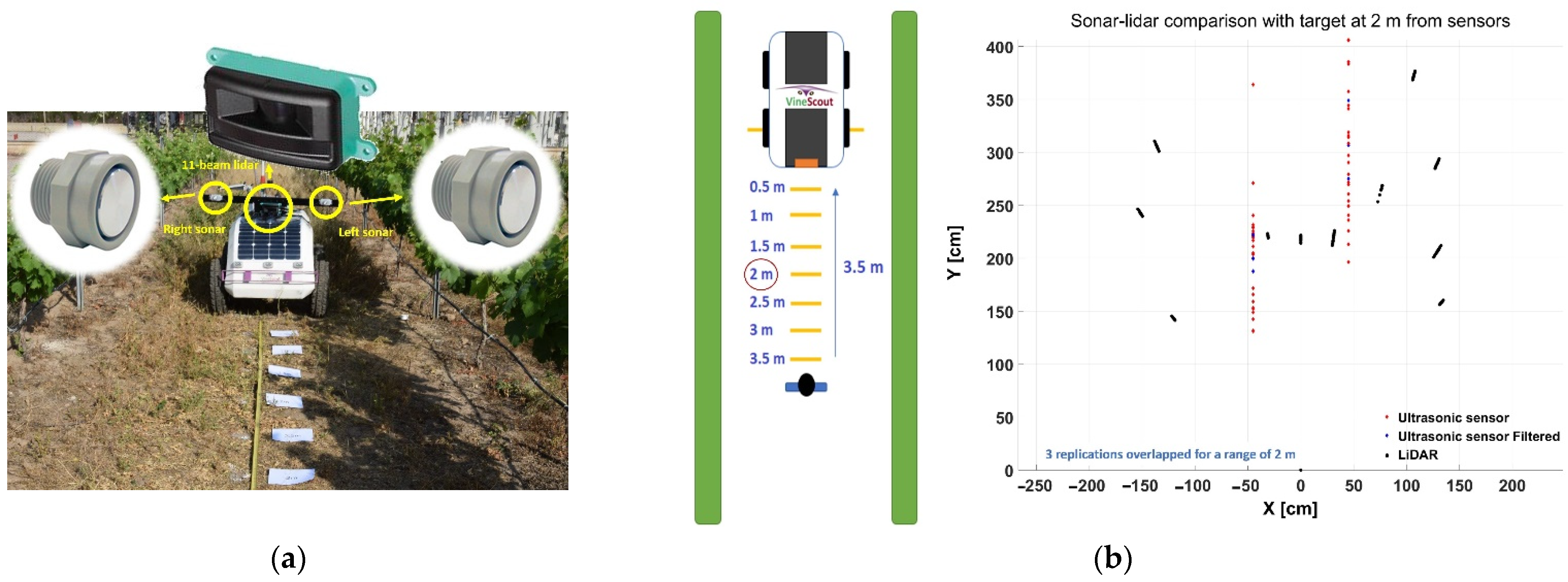
Figure 7b. The robot is a four-wheel-drive two-wheel-steer platform of 200 kg mass. It is powered by three Li-ion batteries and monitors the right canopy side every two rows. Autonomous navigation requires vertical trellises as crop supporting structures, row spacing in the range 1.8–3 m, and a headland clearance of 5 m. Mild slopes up to 12° and weeds or cover crops below 50 cm are traversable. Canopy temperature was registered by an infrared radiometer (SI-121, Apogee Instruments, Inc., Logan, UT, USA), whereas air temperature was measured with two different sensors: weather sensor BME 280 (Bosch Sensortec GmbH, Reutlingen, Germany) in season 2019 and the ambient sensor T7311-2 (Comet System, s.r.o., Rožnov pod Radhoštěm, Czech Republic) for 2020 season. NDVI was registered with a spectral reflectance sensor (SRS, Meter Group Inc., Pullman, WA, USA), and the distance to the canopy (S
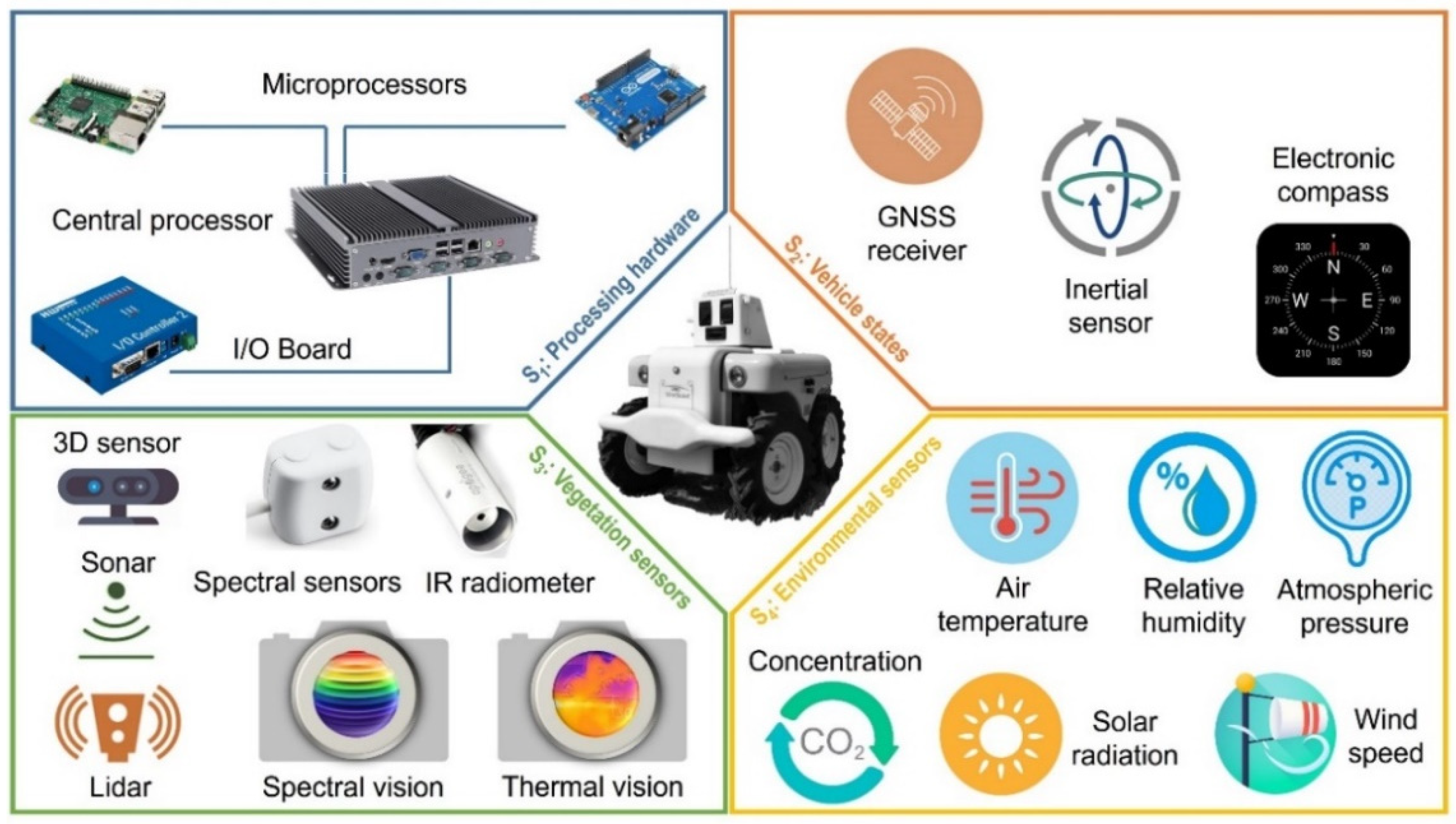
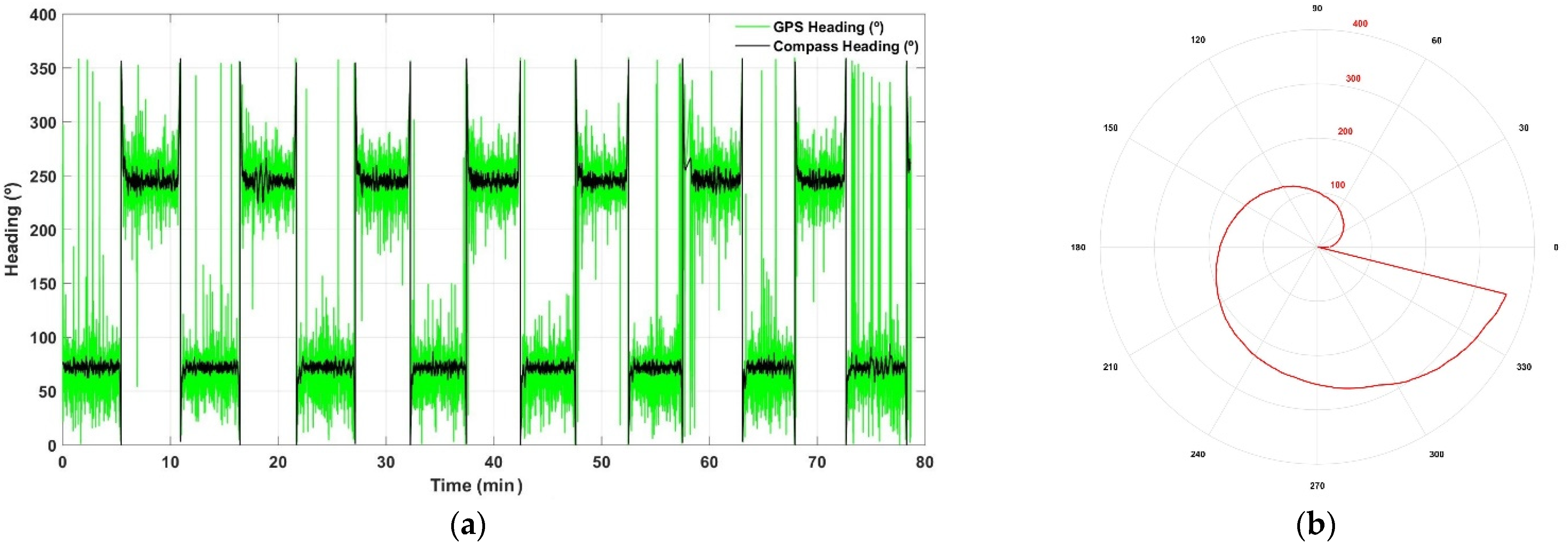
R in Equation (1)) was sensed with a ruggedized ultrasonic sensor (UC2000 30GM IUR2 V15, Pepperl + Fuchs, Mannheim, Germany). The SRS has an accuracy of 10% or better for spectral irradiance and radiance values, and a measurement time below 600 ms. The robot is equipped with an electronic compass (SEC385, Bewis Sensing Technology LLC, Wuxi, China) to track instantaneous heading. As for the processing hardware system (S1), the robot comprises a central computer (Irontech, Bescanó, Spain), an input–output connectivity board (NI USB-6216, National Instruments, Austin, TX, USA), and three microprocessors (Arduino, Somerville, MA, USA).
As the differentiating phenomenon to determine zoning is the hydric state stood by the vines, the most significant tests are those taking place during midday or in the afternoon, since water stress conditions were more apparent. Three mapping sessions are analyzed as data source for harvesting zoning, as specified by
Table 1. Based on the idea that the force of this (data-driven) approach rests on the amount of data collected in the field, being data consistency taken for granted, we can define the term data pressure (DP) as an analogy from the physical sciences where, in this case, it refers to the number of data points per area unit (points/m
2). For the tests listed in
Table 1, each data point represents a vector including the following measurements: acquisition time, geodetic coordinates, GPS consistency indicators (fix, number of satellites, HDOP), canopy temperature, NDVI, and ambient variables (air temperature, barometric pressure, and relative humidity).
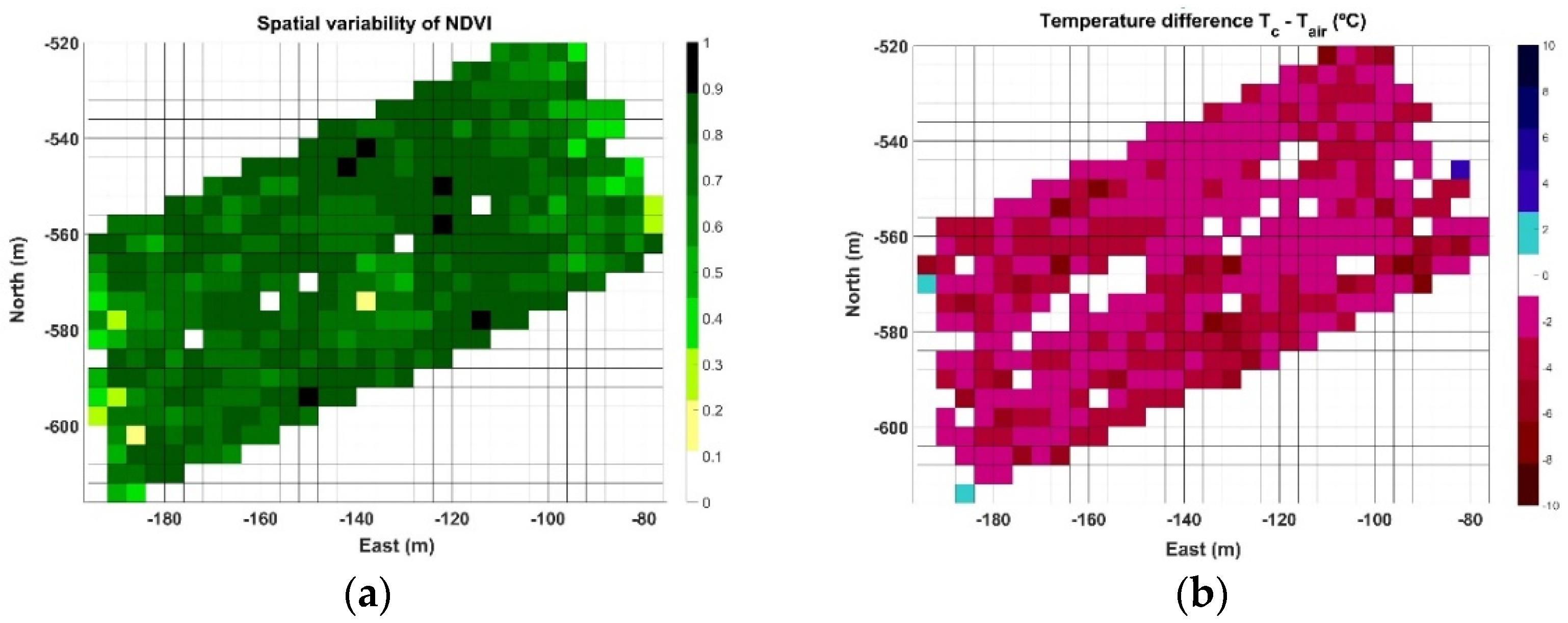
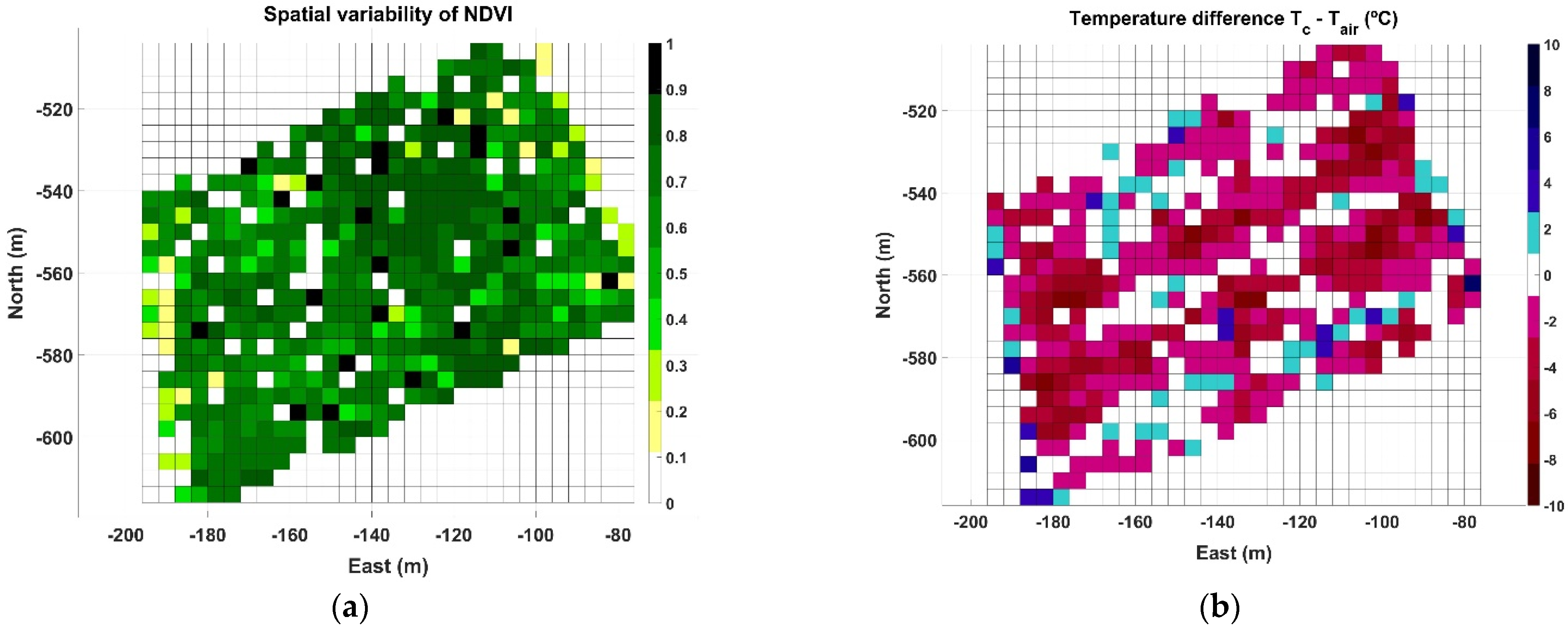
The two parameters selected to characterize two different zones of vines are the spectral index NDVI and the difference between canopy and air temperature (∆T). Beginning with Map A,
Table 1 indicates that there are 20,124 points registered within approximately one half hectare, leading to a data pressure of 3.7 points/m
2. In this use case, each point carries information about both parameters (NDVI and ∆T). Each time a map is constructed, each row is characterized by a different number of points, being impossible to make measurements in the same spots when the vehicle traverses the same row in different sessions. This setback, however, is easily circumvented by adopting a grid approach, where each cell represents the averaged value of each parameter within a field portion of expected homogeneity, for example 4 m × 4 m in this use case, considering that row spacing in the vineyard is 2 m and the robot traverses every other row. The NDVI grid map corresponding to Map A is plotted in
Figure 8a, and the grid for ∆T is depicted in
Figure 8b. As shown in the figure, with a cell size of 16 m
2, the resolution of the grid is 31 cells in the horizontal dimension and 25 cells in the vertical dimension, summing up to 775 cells in the grid. Interestingly, because the rows are aligned in an orientation southwest–northeast (
Figure 7b), the NW and SE corners of the grid are empty, resulting in 400 active cells out of 775, and therefore about 50 points per cell on average. Even though
Figure 8a contains the typical dispersion found in agriculture, it is possible to distinguish a strip of higher vigor in direction NW→SE between east coordinates −130 and −100 m. This vigorous strip also has a small ∆T in
Figure 8b, about −2 °C, being high ∆T concentrated on east and west field boundaries and more extensively over the west side of the vineyard plot.
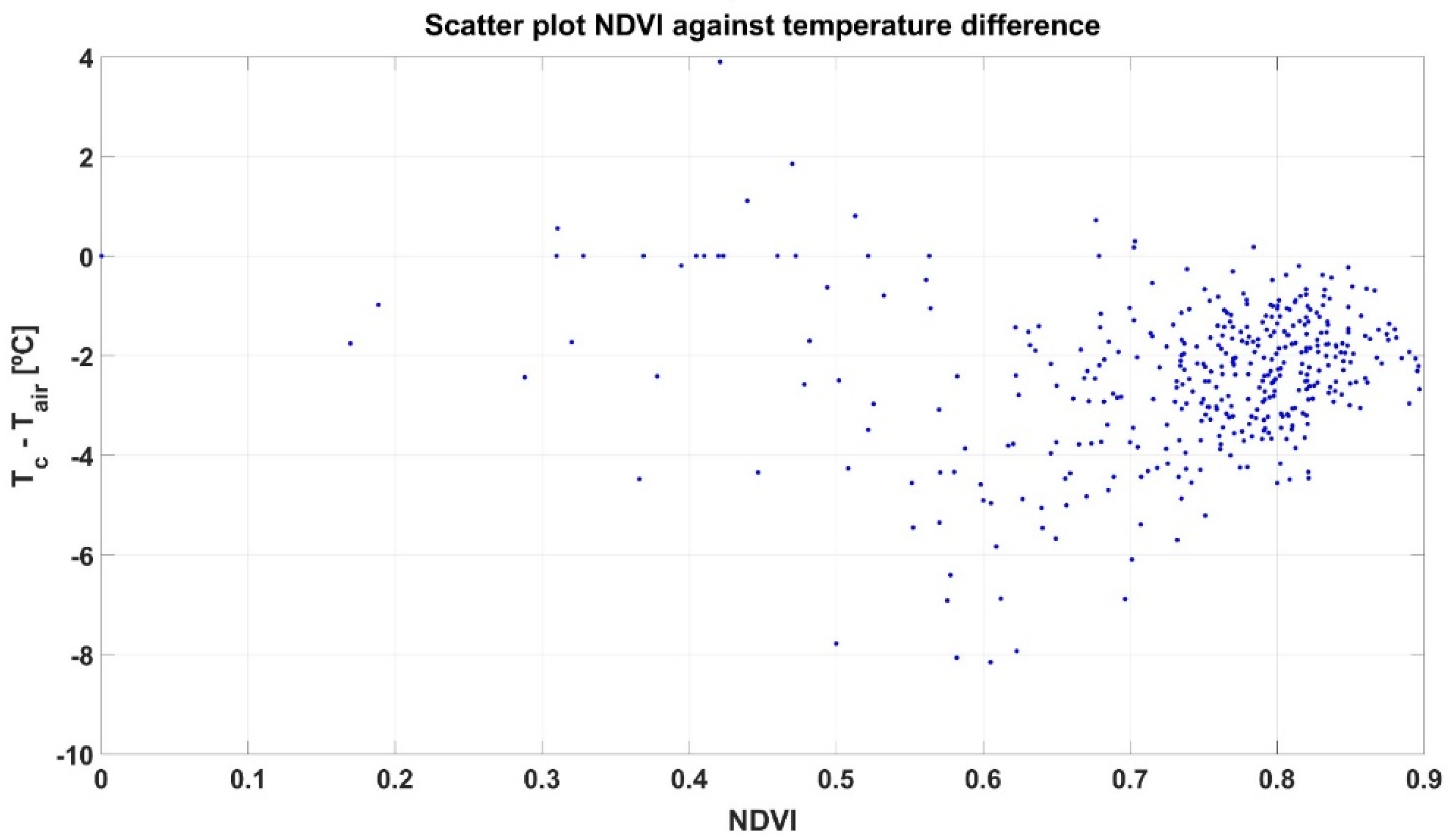
While the two grids in
Figure 8 are quite visual and highlight spatial differences, we should relate them to reach deeper insights before attempting to cluster cells into harvesting zones.
Figure 9 shows a scatter plot that merges the information contained in both grids, where the abscissa axis represents the NDVI calculated for each cell, and the ordinate axis shows the temperature difference ∆T. The plot reveals a high concentration of cells agglutinated around NDVI ≈ 0.8 and ∆T ≈ −3 °C.
At first sight, and just following visual inspection, it is difficult to extract conclusions from the plot in
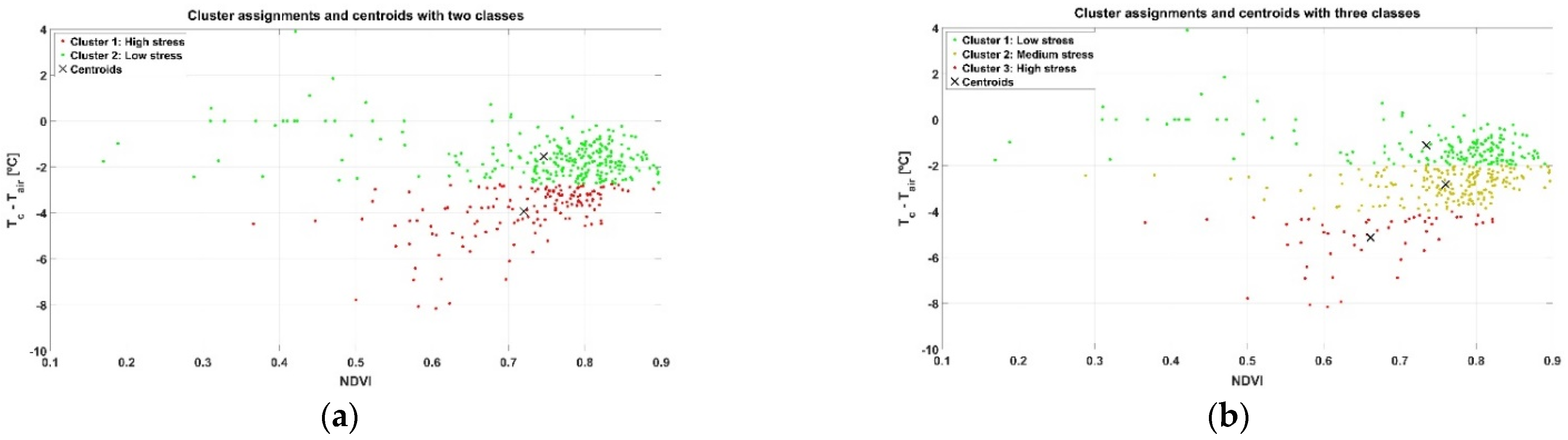
Figure 9 regarding zoning. To automate the process and avoid any preconceived bias, an unsupervised learning technique for clustering such as the k-means algorithm was applied, specifically set to use Euclidean distances and execute 1000 iterations. The k-means algorithm requires choosing the number of classes beforehand. Even though only two (wine) classes are possible from a practical standpoint in the vineyard monitored, two potential approaches are initially considered for Map A: (1) straightforward selection of two classes, one representing low stress and the other high stress; and (2) a more restrictive condition for high quality wine, by which three classes of hydric stress are considered (low, medium, and high), merging low and medium stress for one type of wine and leaving high stress cells for the other.
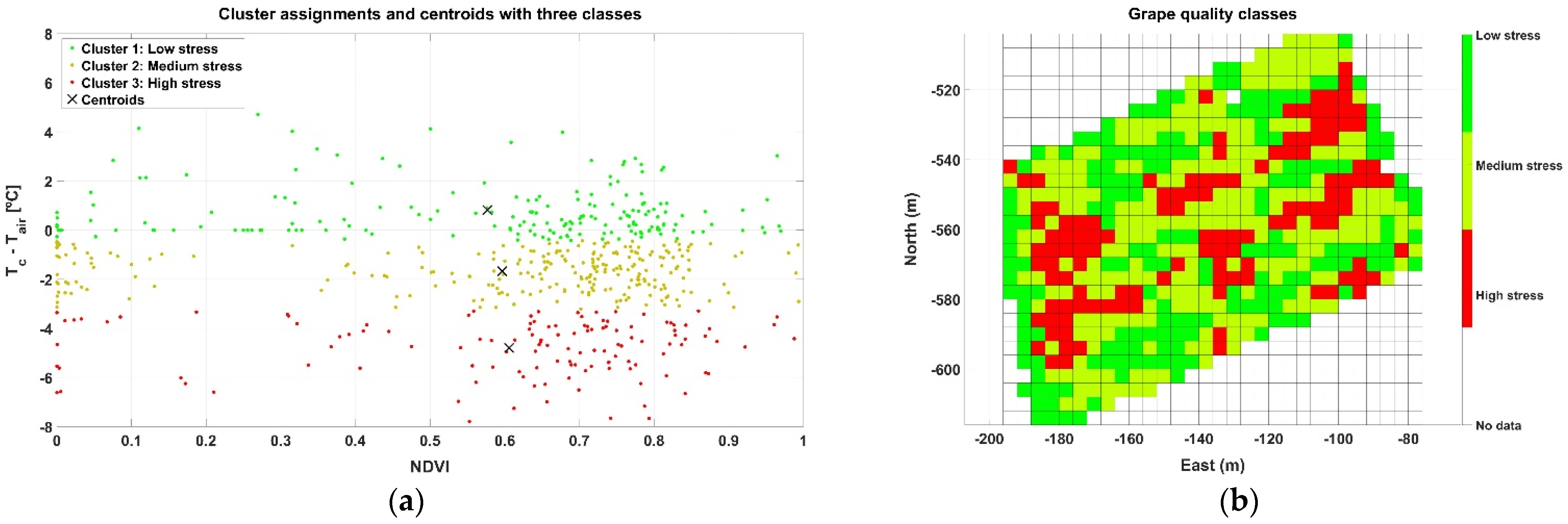
Figure 10 plots the resulting clusters and their centroids for both approaches k = 2 (
Figure 10a) and k = 3 (
Figure 10b), while
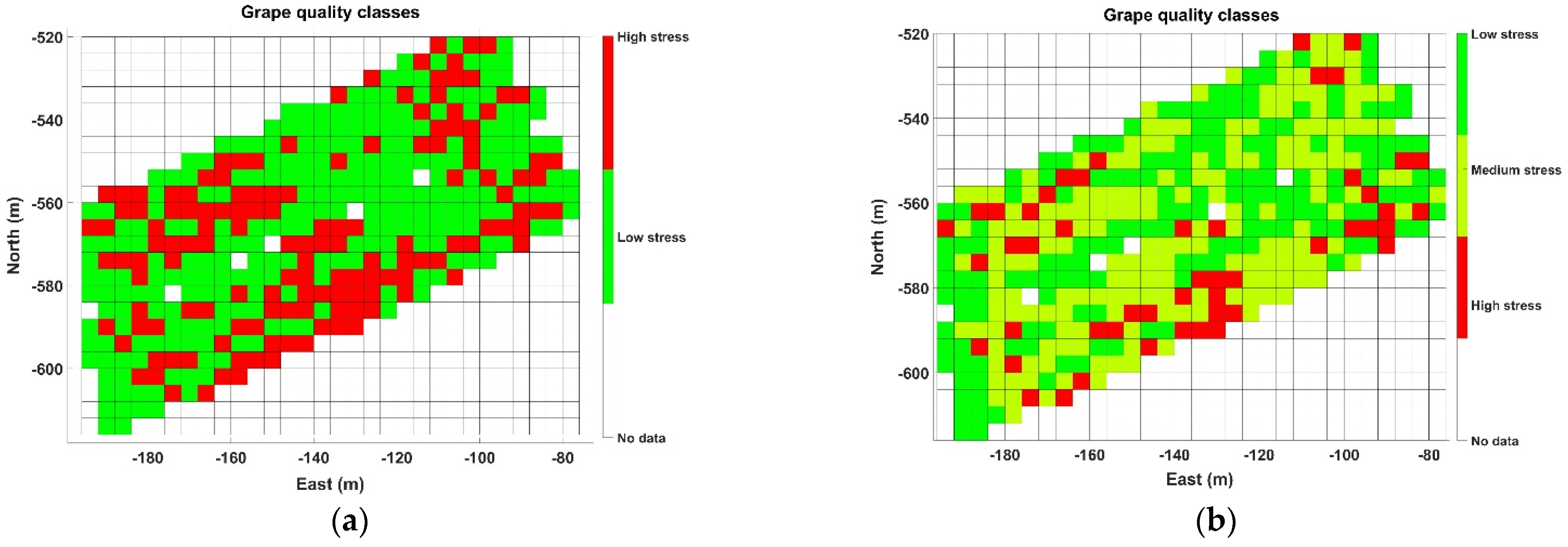
Figure 11 shows the harvesting zones that result from applying the classes determined by the k-means algorithm (
Figure 10) to the actual field plot as monitored in June 2019. Notice that the clustering algorithm gives more weight to the temperature difference than to NDVI at the time of separating classes, something that was not intuitive from the results in
Figure 9. Nevertheless, the highest stress is related to lower vigor (smaller NDVI) for both approaches based on the centroids of the clusters.
Map B represents the most critical conditions of the three data acquisition sessions, as data were taken in July 2019 during a heat wave with an average ambient temperature for the duration of the test of 40.4 °C, and maximum peaks over 43 °C.
Figure 12 illustrates the NDVI grid map (
Figure 12a) and the temperature difference ∆T grid map (
Figure 12b) for the 0.8 ha monitored in Map B. The spatial distribution of NDVI (
Figure 12a), which has been related to vine vigor and growth, continues highlighting the high vigor strip already detected in
Figure 8a. The ∆T map in
Figure 12b, on the contrary, shows a different pattern where cells representing large negative differentials concentrate along certain rows, enhancing a linear pattern with the same orientation of the vine rows traced by the vehicle path in
Figure 7b.
The zone map in
Figure 11a offers a balanced distribution of cells for k = 2 (two zones). However, being demanding in terms of highly distinctive wine traits implies considering only those zones where there is a high likelihood of finding properly control-stressed vines. As a result, the subsequent analysis systematically considers three classes when clustering (k = 3), and therefore three harvesting zones, with the purpose of isolating highly stressed vines and combining low-medium stress in another zone.
Figure 13a provides the results of the k-means clustering with its found centroids, while
Figure 13b plots the resulting three zones in grid format.
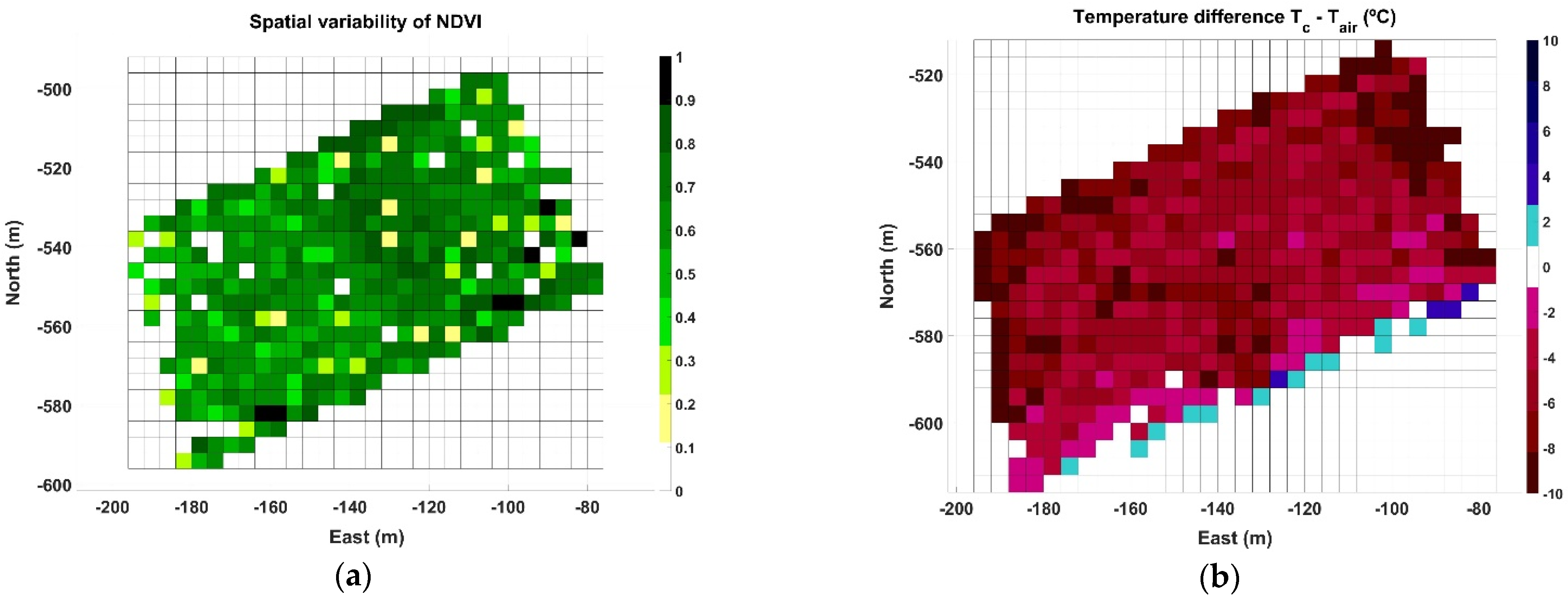
The last case studied, Map C, was registered in September 2020, with an average air temperature during the test of 38.9 °C and a range of measurements between 34.2 and 41.2 °C. The average relative humidity was 14%. The grid representing NDVI (
Figure 14a) keeps the consistency of the high vigor strip outlined in the previous maps, but the identification of trends in the ∆T grid (
Figure 14b) becomes more complex for the cells away from the boundaries.
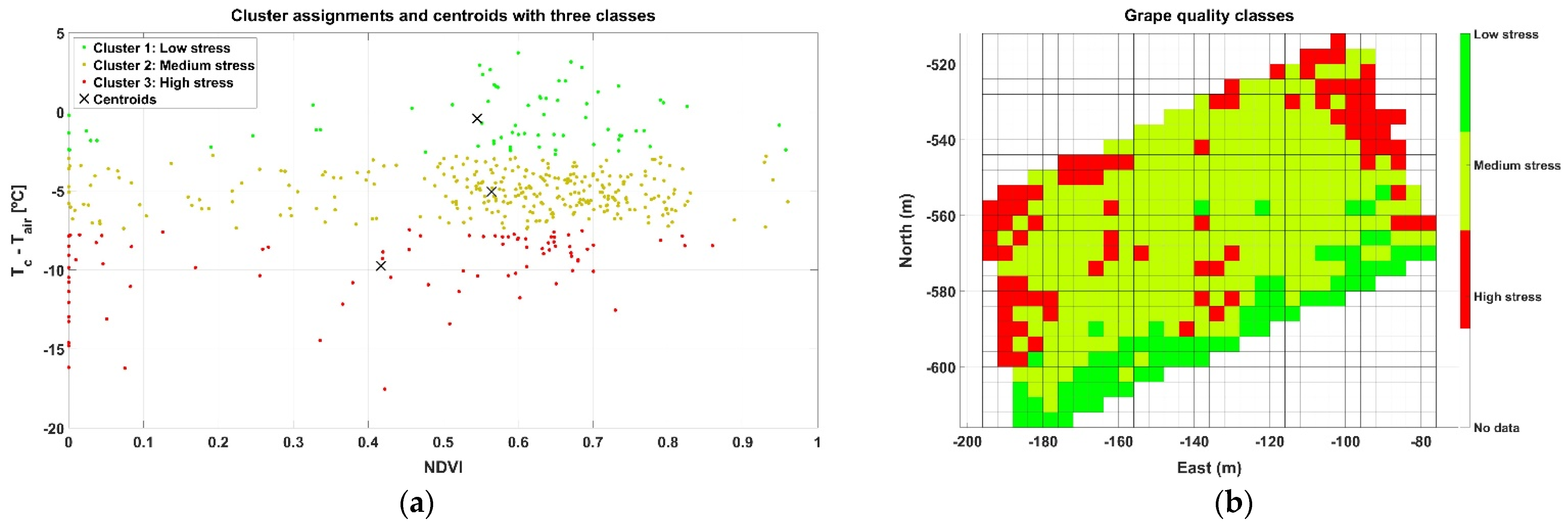
Despite the lack of clear trends in the spatial distribution of crop parameters, ∆T in particular, unsupervised clustering helps to classify cell properties objectively and unambiguously by means of numerical outputs. High stress for Map C, for example, is characterized by a cluster with a centroid located at NDVI ≈ 0.42 and ∆T ≈ −10 °C, as graphed in the scatter plot of
Figure 15a. When grouped cells were spatially distributed in the grid in
Figure 15b, systematic zoning showed fewer cells with a high level of stress than in Map B (
Figure 13b), coming back, to some extent, to the results of Map A (
Figure 11b) collected more than a year earlier.
4. Discussion
The three NDVI grid maps estimating vigor for Maps A (
Figure 8a), B (
Figure 12a), and C (
Figure 14a) are consistent in outlining a strip of higher vigor, which also coincides with a high ∆T, either positive or small negative. This, a priori and in advance of a deeper analysis, already reveals signs of an area of lower hydric stress, and therefore distinct properties expected in the grapes. The concluding maps at the time of making a decision, however, are those featuring stress zones (
Figure 11b,
Figure 13b and
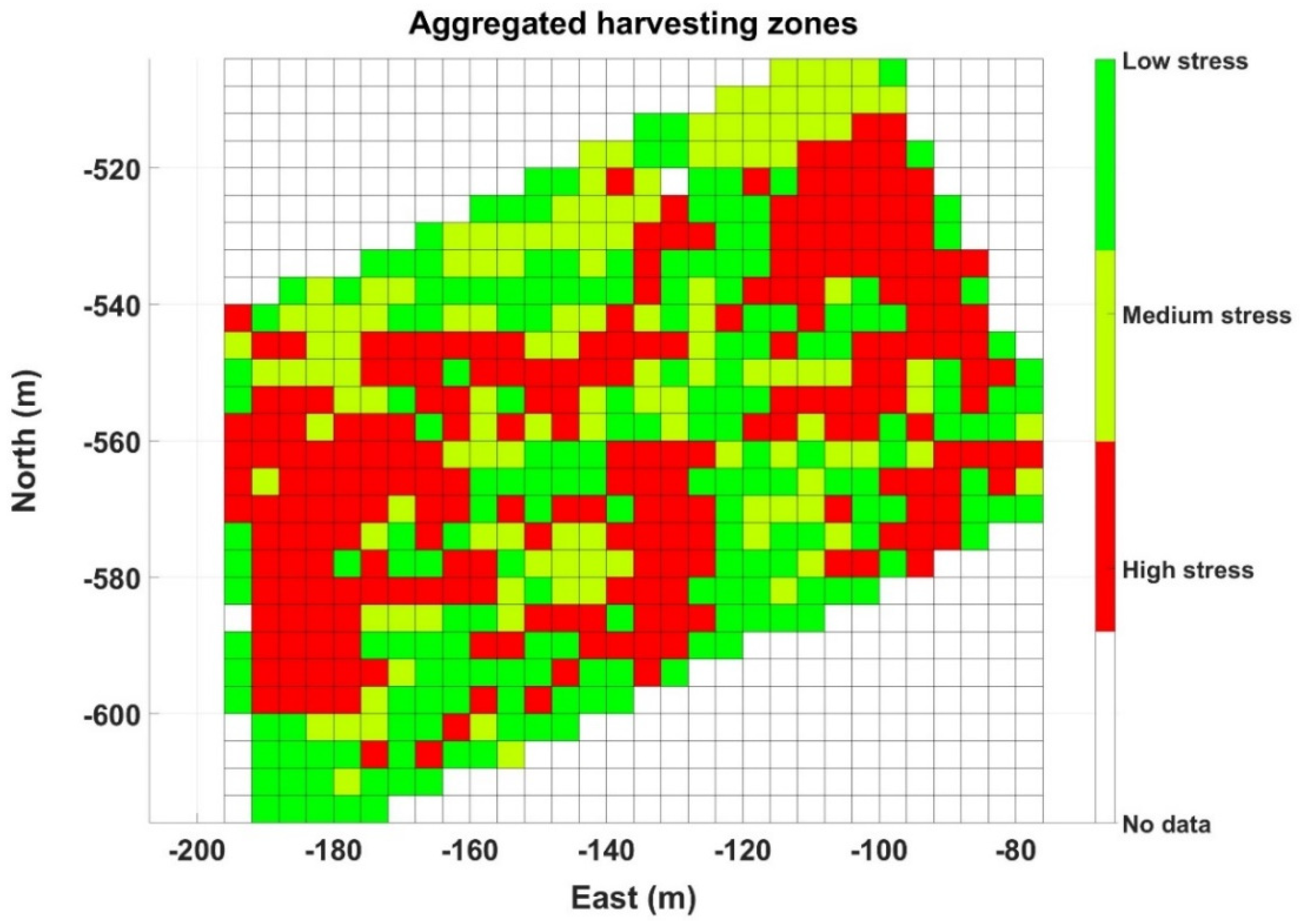
Figure 15b). The three maps contain zones that are consistently labeled as high stress, mainly in Maps A and C. However, Map B in particular, the one with the hardest ambient conditions, also highlights specific rows from headland to headland. To ease interpretation, the three zoning maps can be packed up into one, such that every cell retains the highest stress value out of the three final maps (A–C) if it is labeled as high stress at least in one of them. Otherwise, if the cells are labeled as low or medium stress, the final value assigned is low stress, with the purpose of reducing the population of medium stress cells, and thus decreasing map variability to facilitate the sorting of cells into two operative classes.
Figure 16 depicts such an aggregated map.
In the process of implementing decision support mechanisms based on data, after setting an advantageous sensing architecture, choosing the proper field parameters, gathering massive field data, and using learning techniques to assist in data analysis, we reached the final stage in which a recommendation must be delivered to the user. The base for this recommendation is contained in the grid map of
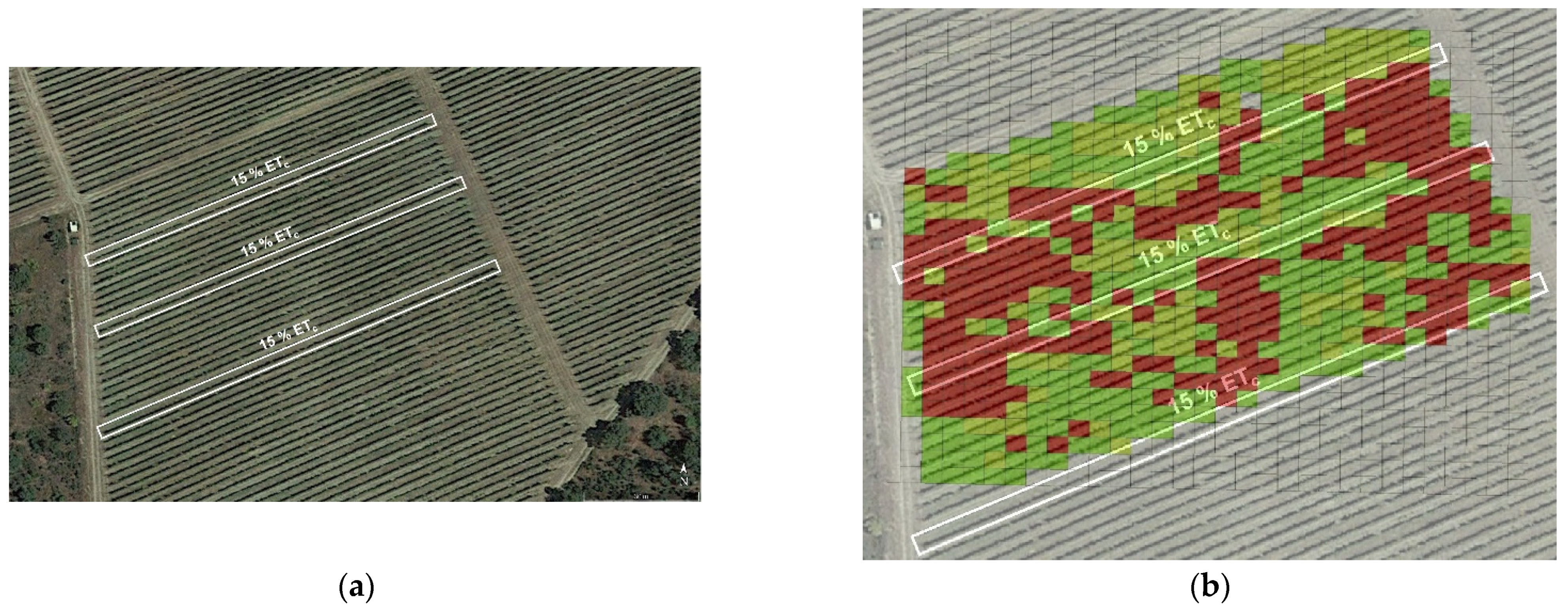
Figure 16, although a final refinement is needed to reach a practical solution. To do so, a reexamination of the actual physical conditions found in the field may be very helpful, especially those occurring when the data were acquired.
Figure 17a shows a satellite image of the monitored plot with the irrigation lines (8, 17, and 29) that had a deficit irrigation rate (15% ET
c) in comparison with the rest (60% ET
c), as a practical way to induce stress in controlled rows. The experimental plot considered up to Row 32. Note that the high vigor strip already identified in the NDVI maps is slightly noticeable in the satellite image.
Figure 17b overlays the position of deficit pipes with the aggregated grid in
Figure 16.
The aggregated map in
Figure 16 inherits several full rows of high stress from Map B (
Figure 13b). According to
Figure 17b, these high stress rows approximately replicate the lines under deficit irrigation, which makes sense because the ambient conditions when the map (B) was taken were actually hard, and water deprivation with temperatures of 40 °C and above is prone to create certain stress in plants. The match is not exact, however, because not every row was mapped (traversing alternate rows and measuring only on the right side results in skipping some rows) and the cell size of 4 × 4 somewhat merges some consecutive rows. It would have been more revealing to maintain blocks of at least six adjacent rows with the same irrigation pattern. Nevertheless, in regular production conditions, all rows will get the appropriate water rate, and stress will be determined by other physical properties of the plot such as elevation, orography, and soil, in addition to atmospheric conditions. With these premises, the aggregated map in
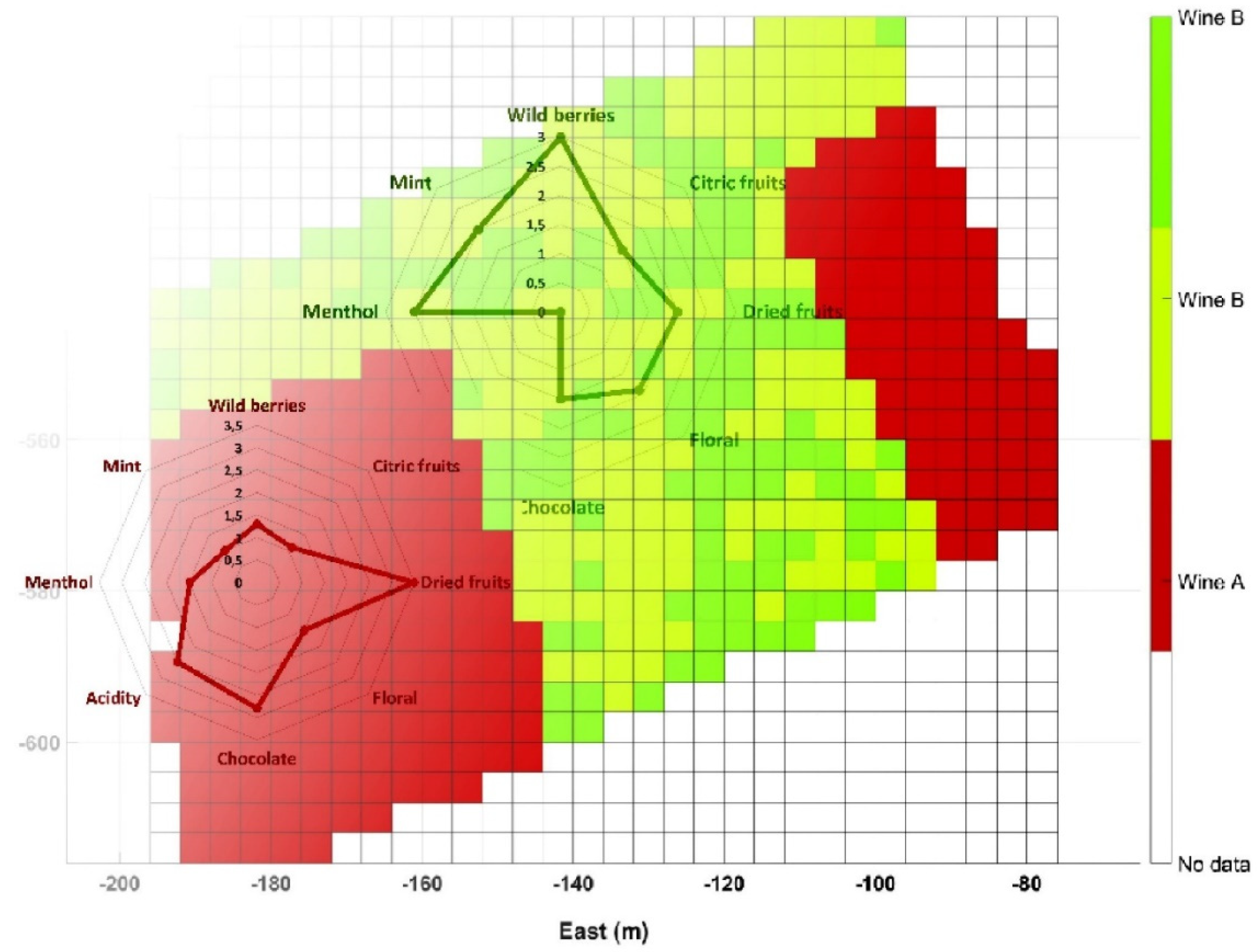
Figure 16 was simplified to represent two homogeneous zones in which differential harvesting can be applied in practice, as illustrated in
Figure 18. These two zones approximately coincide with the wine-making practices followed in this vineyard; microvinification and wine tasting sessions undertaken along the VineScout project revealed distinct properties for the wines coming from the vigor strip zone and from the central-west area, as indicated in
Figure 18. The aroma ratings of the two wines shown in the figure below belong to the 2018 harvest that was microvinified in 2019 (the grapes of 2019 season had to be microvinified in 2020, but, due to restrictions derived from the COVID-19 pandemic, this laboratory work was suspended), but it provides end-users with a reasonable expectation for upcoming seasons. These ratings prove that the final traits are distinct for each zone; it will be up to the customers to decide which option better fits their palates (and their pockets). This is, indeed, the final stage of the data-driven recommendation. Now, it is the grower’s turn to make the final decision, based—or not—on the harvesting map in
Figure 18. For such decision, other circumstances such as harvesting costs, the availability of a combine harvester versus pickers, and other winery logistics, for example, may exert a significant weight on the ultimate decision.
5. Conclusions
An optimized architecture for crop sensing requires choosing, placing, and integrating non-invasive sensors such that field data reliability becomes the highest possible. This is not trivial, and picking the finest alternative among multiple sensing choices and applying reinforcing techniques such as redundancy usually make a difference in performance. The potential of big data has been stated for many disciplines, yet agriculture is not at such state of maturity. Although this is arguable, the reality is that consistent field data taken regularly from the close environment of plants are scarce. This research proposes a methodology to gather massive data—as a forerunner of big data—by combining robotics and proximal sensing. The contribution of this work and the innovative steps undertaken with it include a methodology for autonomous mapping of orchards from ground platforms, the massive sampling of crops with over 20,000 points/ha following a systematic procedure to do so, the high resolution monitoring of NDVI at less than 1 m, the calculation and registration of the precise geographic localization of canopies rather than vehicle trajectories, the tracking of the environment for each plant using global references with a local origin, the way the robotic platform for monitoring operates, and the development of an unsupervised automatic system to create two types of wine (systematic classification for differential harvesting). In addition, massive data were collected over several years and are available for other researchers.
Our current experience is that average growers believe that an automated machine “just” for collecting data, regardless of their truthfulness and usefulness, does not justify the complexity of the system. Most farmers believe that a robot, or intelligent vehicle in a general formulation of this problem, should also make some “useful” work that pays off the investment. However, the power contained in massive data is not easy to grasp, even with today’s experience with data-driven approaches, which are still young as farming tools. The use case described above ended up making a clear easy-to-execute recommendation, which fell quite close to the end-user practice of previous years in that vineyard. It provided an explanatory example to illustrate the philosophy proposed in this article with only three variables: the spectral index NDVI, the air temperature, and the canopy temperature. However, the robot recorded many other parameters for every point, as the relative humidity, barometric pressure, CO2, the photochemical reflectance index, and the reflectance response of both canopy and ambient illumination at wavelengths centered on 650, 810, 570, and 532 nm. Putting all these data at work to yield knowledge value appears to be a titanic effort for an average research team, but data processing analytics and multi-access cloud computing are making exceptional progress to elucidate complex relations and phenomena behind ever-growing amounts of data. When these relations get unleashed and growers actually trust their outcomes, field scouting and proximal monitoring will turn into a need for a sustainable food production in the 21st century.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}