
Characterization of Inkjet-Printed Digital Microfluidics Devices


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Material and Equipment
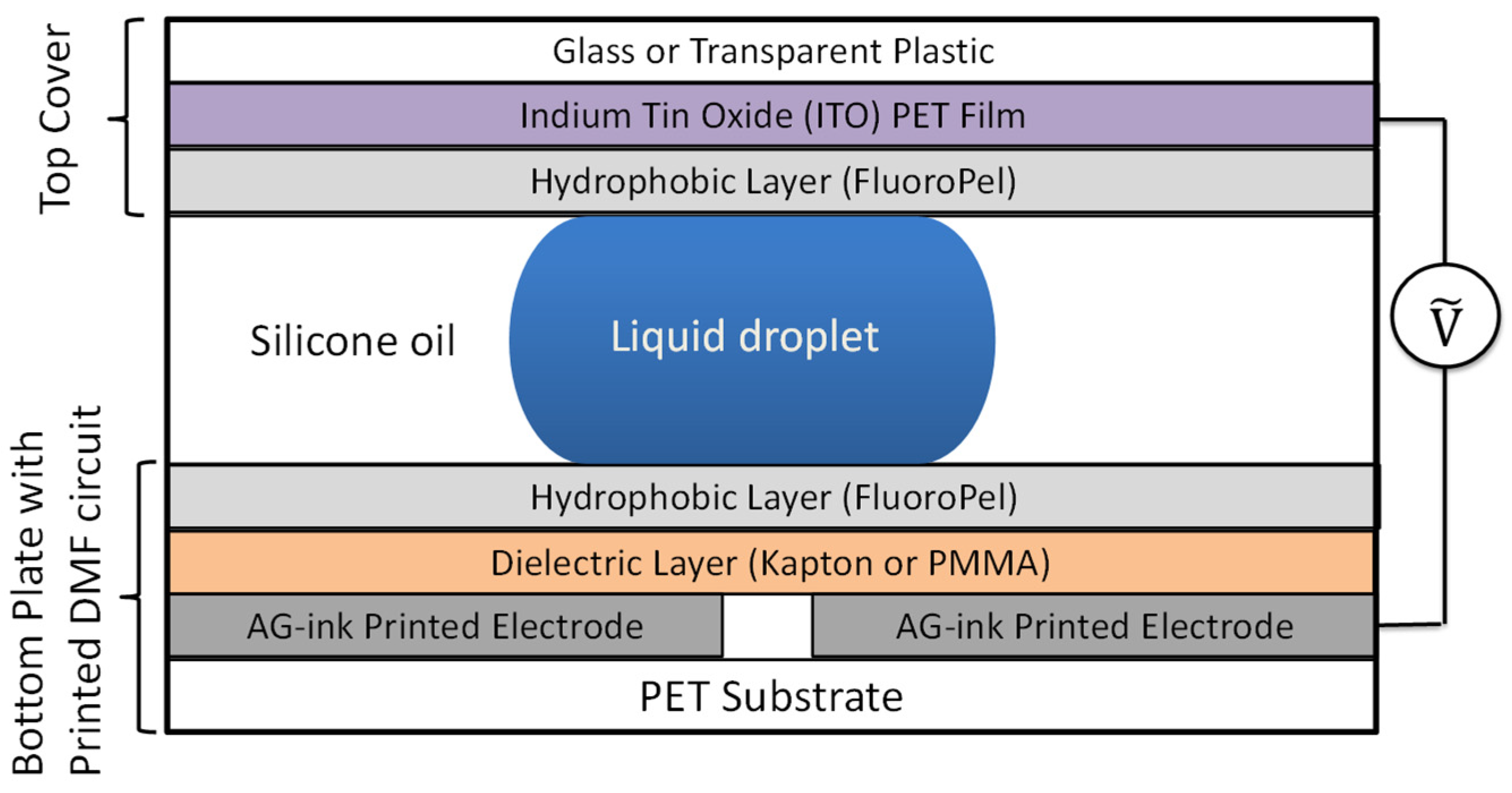
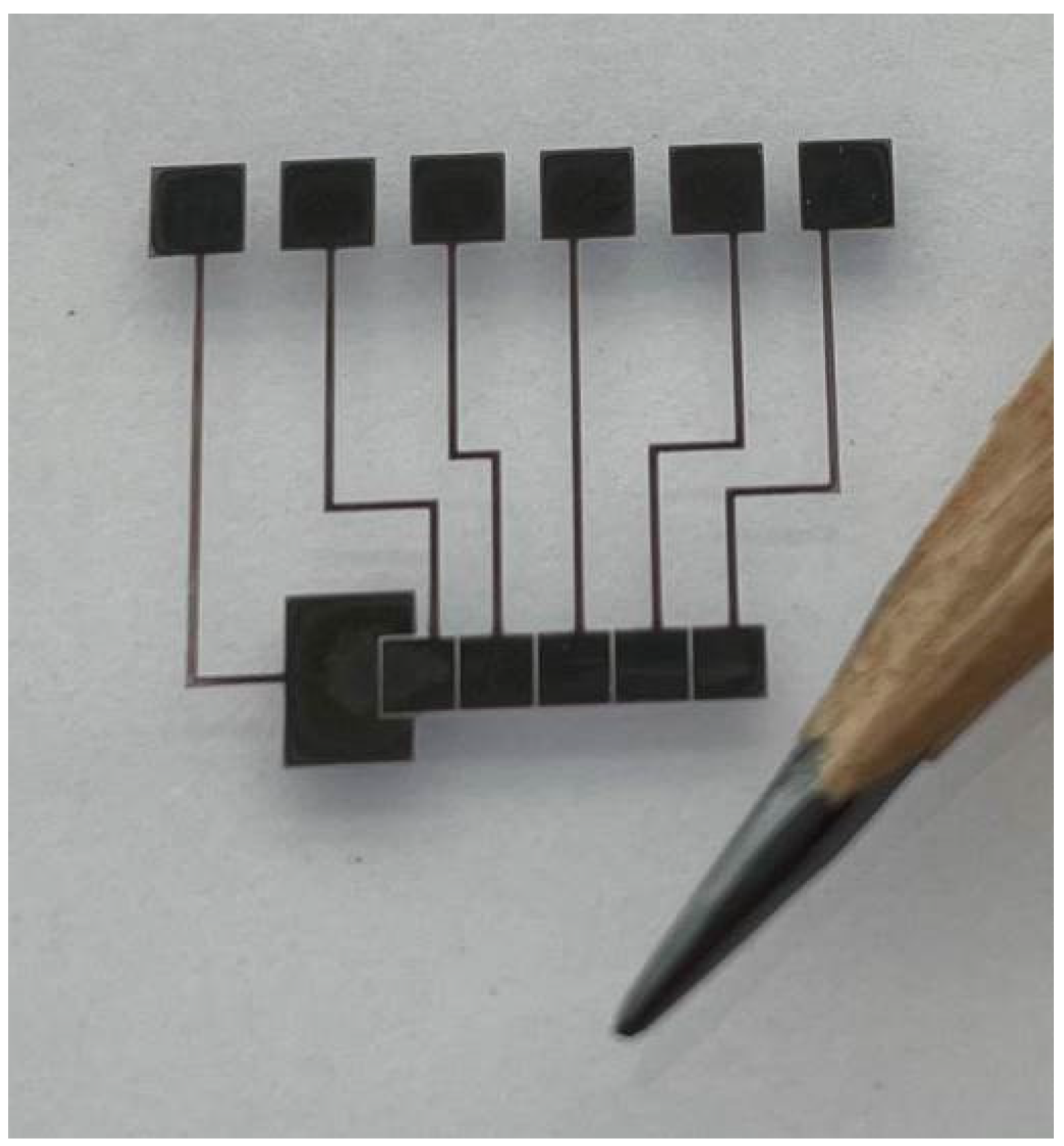
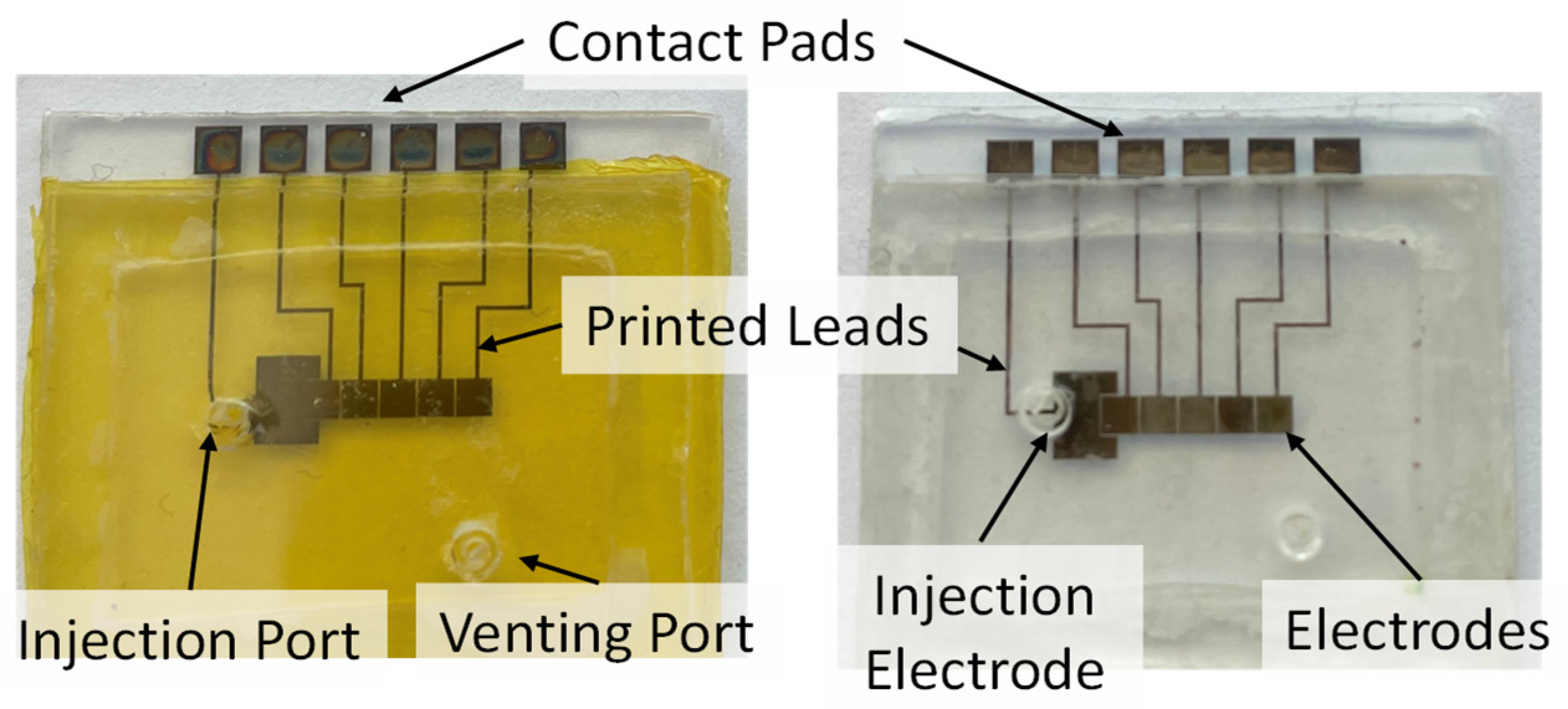
2.2. Device Fabrication
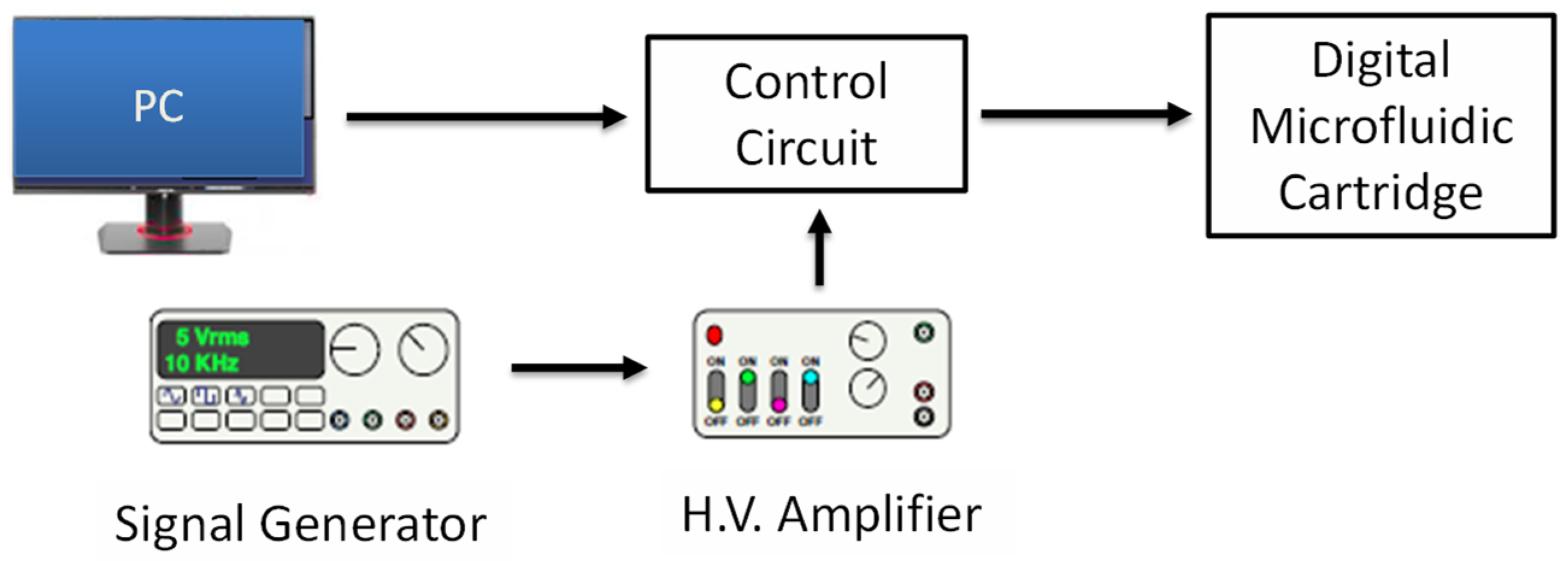
2.3. Device Operation
3. Results and Discussions
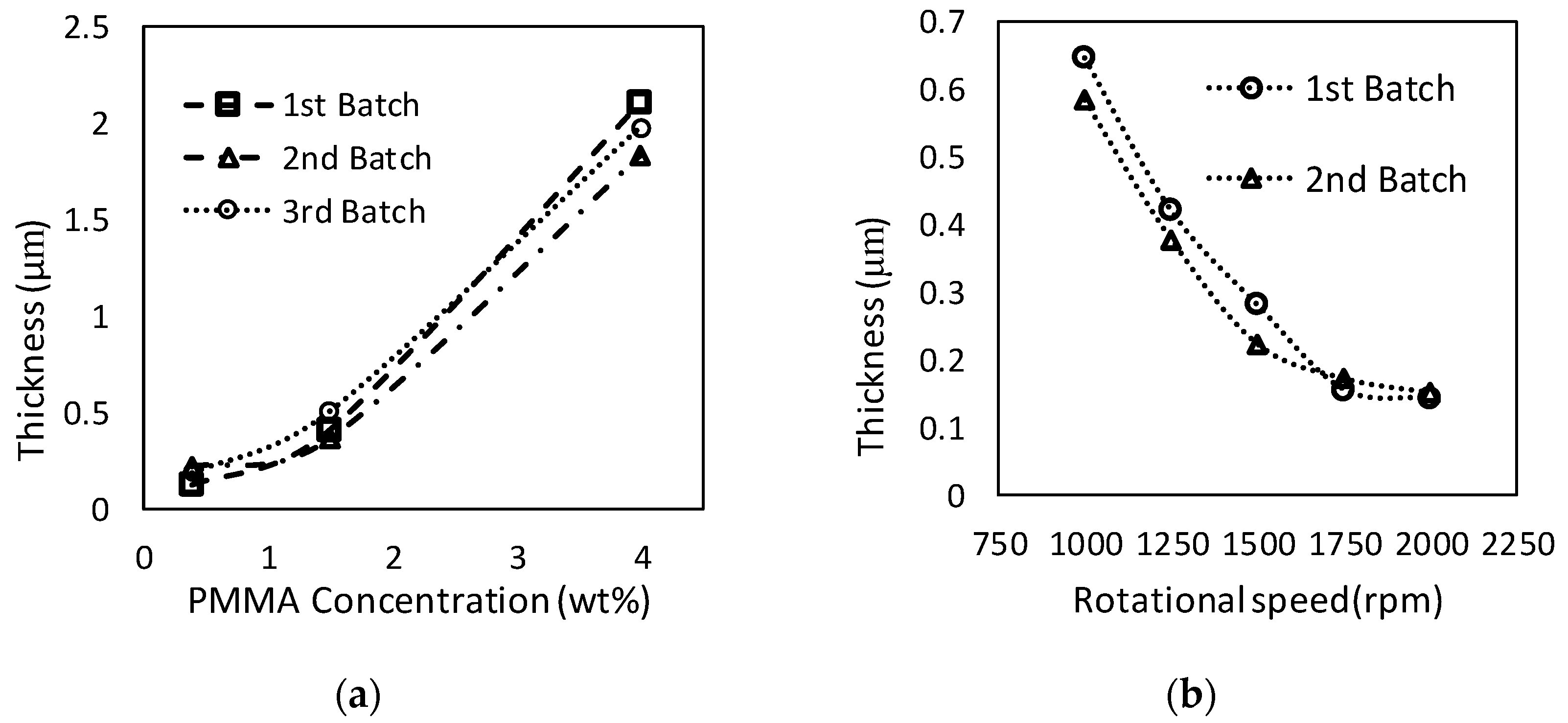
3.1. Coating Thickness Evaluation
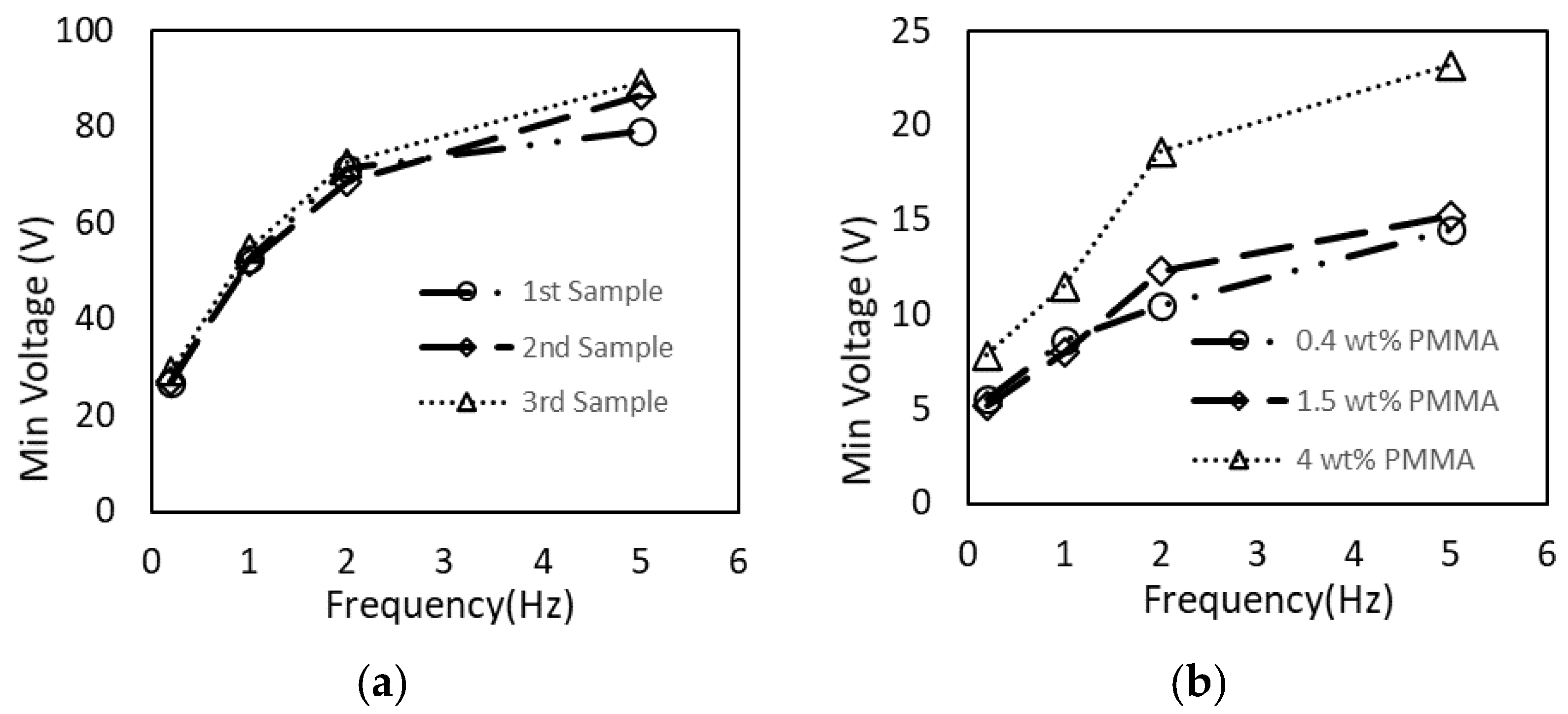
3.2. Droplet Movement Evaluation
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abdelgawad, M.; Wheeler, A.R. The digital revolution: A new paradigm for microfluidics. Adv. Mater. 2009, 21, 920–925. [Google Scholar] [CrossRef]
- Cho, S.K.; Moon, H.; Kim, C.-J. Creating, transporting, cutting, and merging liquid droplets by electrowetting-based actuation for digital microfluidic circuits. J. Microelectromech. Syst. 2003, 12, 70–80. [Google Scholar]
- Choi, K.; Ng, A.H.; Fobel, R.; Wheeler, A.R. Digital microfluidics. Annu. Rev. Anal. Chem. 2012, 5, 413–440. [Google Scholar] [CrossRef]
- Sista, R.; Hua, Z.; Thwar, P.; Sudarsan, A.; Srinivasan, V.; Eckhardt, A.; Pollack, M.; Pamula, V. Development of a digital microfluidic platform for point of care testing. Lab A Chip 2008, 8, 2091–2104. [Google Scholar] [CrossRef]
- Dixon, C.; Ng, A.H.; Fobel, R.; Miltenburg, M.B.; Wheeler, A.R. An inkjet printed, roll-coated digital microfluidic device for inexpensive, miniaturized diagnostic assays. Lab A Chip 2016, 16, 4560–4568. [Google Scholar] [CrossRef] [PubMed]
- Andò, B.; Baglio, S.; Bulsara, A.R.; Emery, T.; Marletta, V.; Pistorio, A. Low-cost inkjet printing technology for the rapid prototyping of transducers. Sensors 2017, 17, 748. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Chen, L. Electrowetting-on-Dielectric Based Economical Digital Microfluidic Chip on Flexible Substrate by Inkjet Printing. Micromachines 2020, 11, 1113. [Google Scholar] [CrossRef]
- Joshi, K.; Velasco, V.; Esfandyarpour, R. A Low-Cost, Disposable and Portable Inkjet-Printed Biochip for the Developing World. Sensors 2020, 20, 3593. [Google Scholar] [CrossRef] [PubMed]
- Fan, Y.; Kong, X.; Chai, D.; Wei, B.; Zhang, Y. Low-cost and flexible film-based digital microfluidic devices. Micro Nano Lett. 2020, 15, 165–167. [Google Scholar] [CrossRef]
- Kahng, S.-J.; Cerwyn, C.; Dincau, B.M.; Kim, J.-H.; Novosselov, I.V.; Anantram, M.P.; Chung, J.-H. Nanoink bridge-induced capillary pen printing for chemical sensors. Nanotechnology 2018, 29, 335304. [Google Scholar] [CrossRef] [PubMed]
- Gao, J.; Chen, T.; Dong, C.; Jia, Y.; Mak, P.-I.; Vai, M.-I.; Martins, R.P. Adhesion promoter for a multi-dielectric-layer on a digital microfluidic chip. Rsc Adv. 2015, 5, 48626–48630. [Google Scholar] [CrossRef]
- Tabatabaeipour, G.; Hajghassem, H.; MohtashamiFar, M. Low-cost hydrophobic layer as a top plate in two-plate digital microfluidics. Eur. Phys. J. Appl. Phys. 2015, 71, 11101. [Google Scholar] [CrossRef]
- Koo, B.; Kim, C.-J. Evaluation of repeated electrowetting on three different fluoropolymer top coatings. J. Micromech. Microeng. 2013, 23, 067002. [Google Scholar] [CrossRef]
- Ahmadi, A.; Holzman, J.F.; Najjaran, H.; Hoorfar, M. Electrohydrodynamic modeling of microdroplet transient dynamics in electrocapillary-based digital microfluidic devices. Microfluid. Nanofluidics 2011, 10, 1019–1032. [Google Scholar] [CrossRef]
- Caputo, D.; de Cesare, G.; Vecchio, N.L.; Nascetti, A.; Parisi, E.; Scipinotti, R. Polydimethylsiloxane material as hydrophobic and insulating layer in electrowetting-on-dielectric systems. Microelectron. J. 2014, 45, 1684–1690. [Google Scholar] [CrossRef]
- Feng, J.-T.; Zhao, Y.-P. Experimental observation of electrical instability of droplets on dielectric layer. J. Phys. D Appl. Phys. 2008, 41, 052004. [Google Scholar] [CrossRef]
- Liu, H.; Dharmatilleke, S.; Maurya, D.K.; Tay, A.A. Dielectric materials for electrowetting-on-dielectric actuation. Microsyst. Technol. 2010, 16, 449. [Google Scholar] [CrossRef]
- Moon, H.; Cho, S.K.; Garrell, R.L.; Kim, C.-J.C. Low voltage electrowetting-on-dielectric. J. Appl. Phys. 2002, 92, 4080–4087. [Google Scholar] [CrossRef]
- Van Osch, T.H.; Perelaer, J.; De Laat, A.W.; Schubert, U.S. Inkjet printing of narrow conductive tracks on untreated polymeric substrates. Adv. Mater. 2008, 20, 343–345. [Google Scholar] [CrossRef]
- Ning, H.; Zhou, Y.; Fang, Z.; Yao, R.; Tao, R.; Chen, J.; Cai, W.; Zhu, Z.; Yang, C.; Wei, J. UV-cured inkjet-printed silver gate electrode with low electrical resistivity. Nanoscale Res. Lett. 2017, 12, 1–7. [Google Scholar] [CrossRef] [PubMed]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; He, Z.; Choi, S.; Novosselov, I.V. Characterization of Inkjet-Printed Digital Microfluidics Devices. Sensors 2021, 21, 3064. https://doi.org/10.3390/s21093064
Chen S, He Z, Choi S, Novosselov IV. Characterization of Inkjet-Printed Digital Microfluidics Devices. Sensors. 2021; 21(9):3064. https://doi.org/10.3390/s21093064
Chicago/Turabian StyleChen, Shiyu, Zhidong He, Suhwan Choi, and Igor V. Novosselov. 2021. "Characterization of Inkjet-Printed Digital Microfluidics Devices" Sensors 21, no. 9: 3064. https://doi.org/10.3390/s21093064
APA StyleChen, S., He, Z., Choi, S., & Novosselov, I. V. (2021). Characterization of Inkjet-Printed Digital Microfluidics Devices. Sensors, 21(9), 3064. https://doi.org/10.3390/s21093064