
Measuring Gait Velocity and Stride Length with an Ultrawide Bandwidth Local Positioning System and an Inertial Measurement Unit

 , ,
, , 
Abstract
:1. Introduction
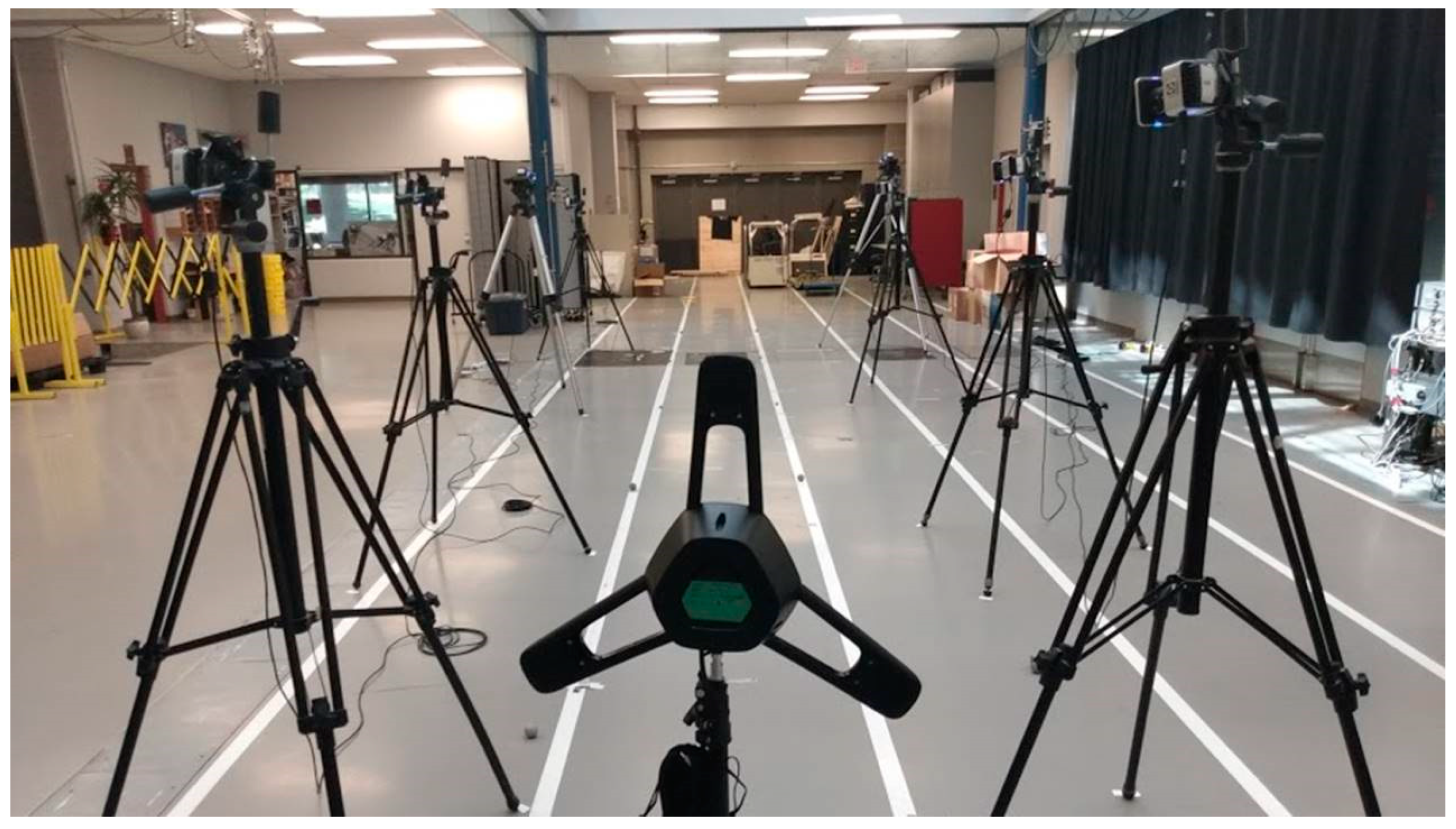
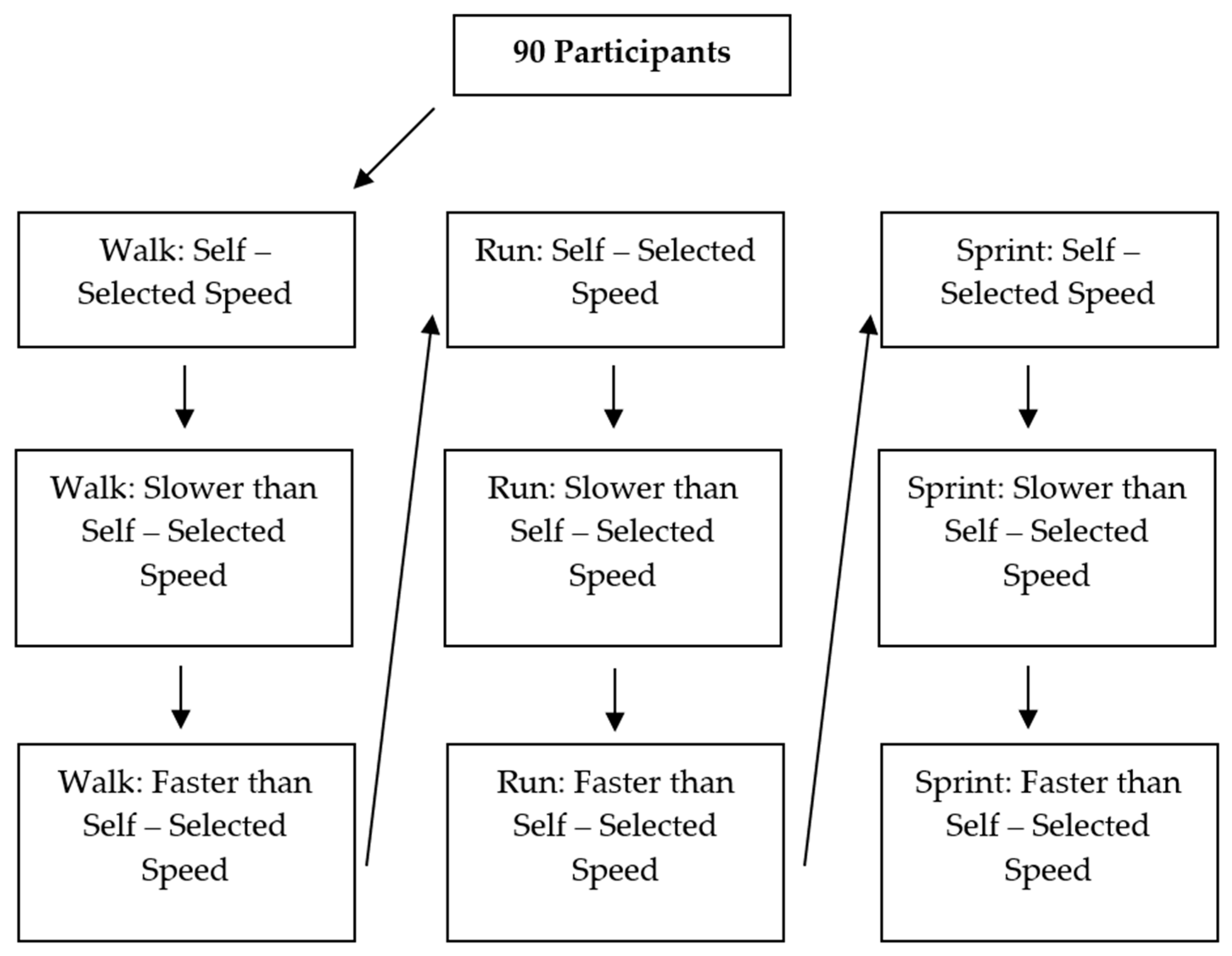
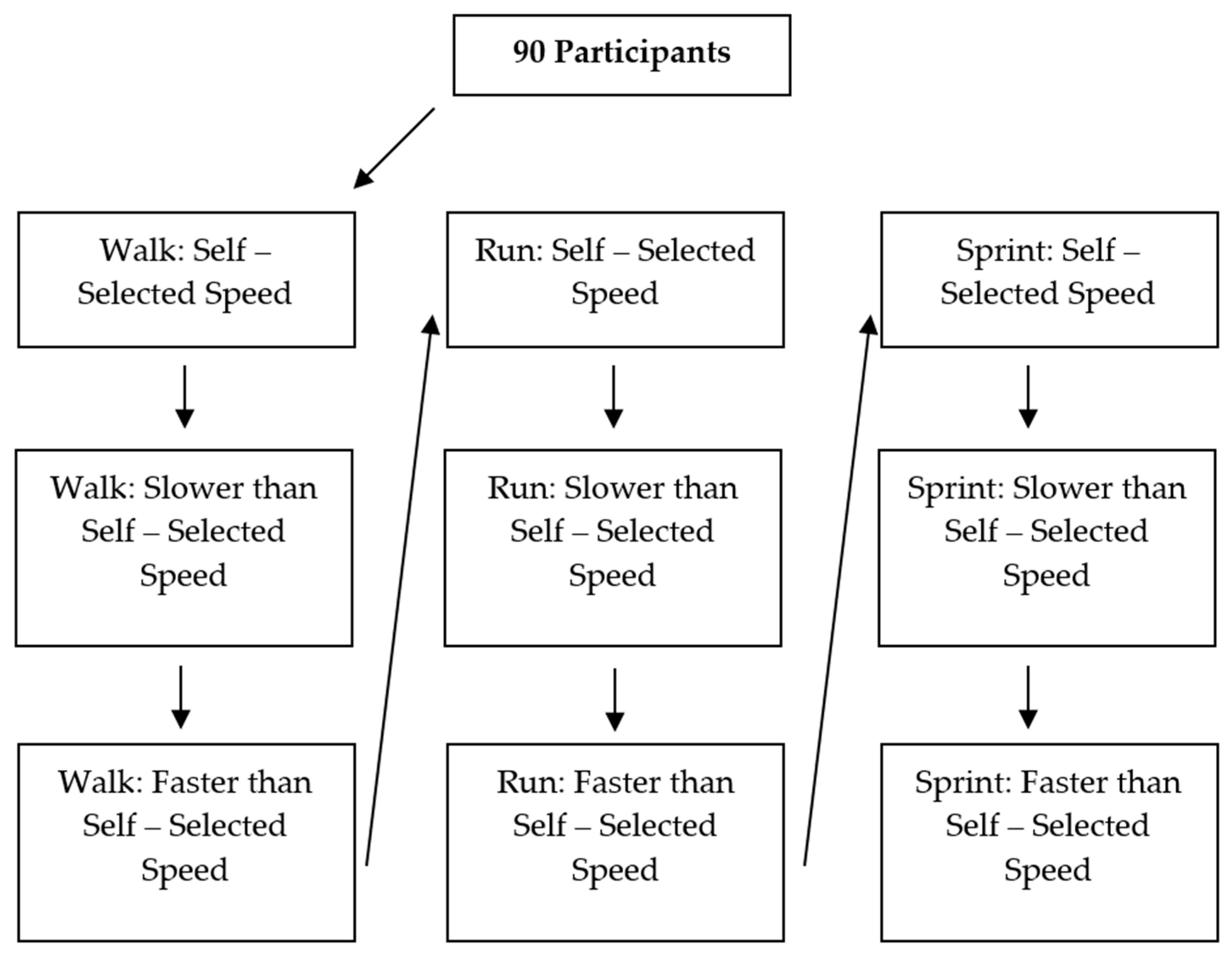
2. Materials and Methods
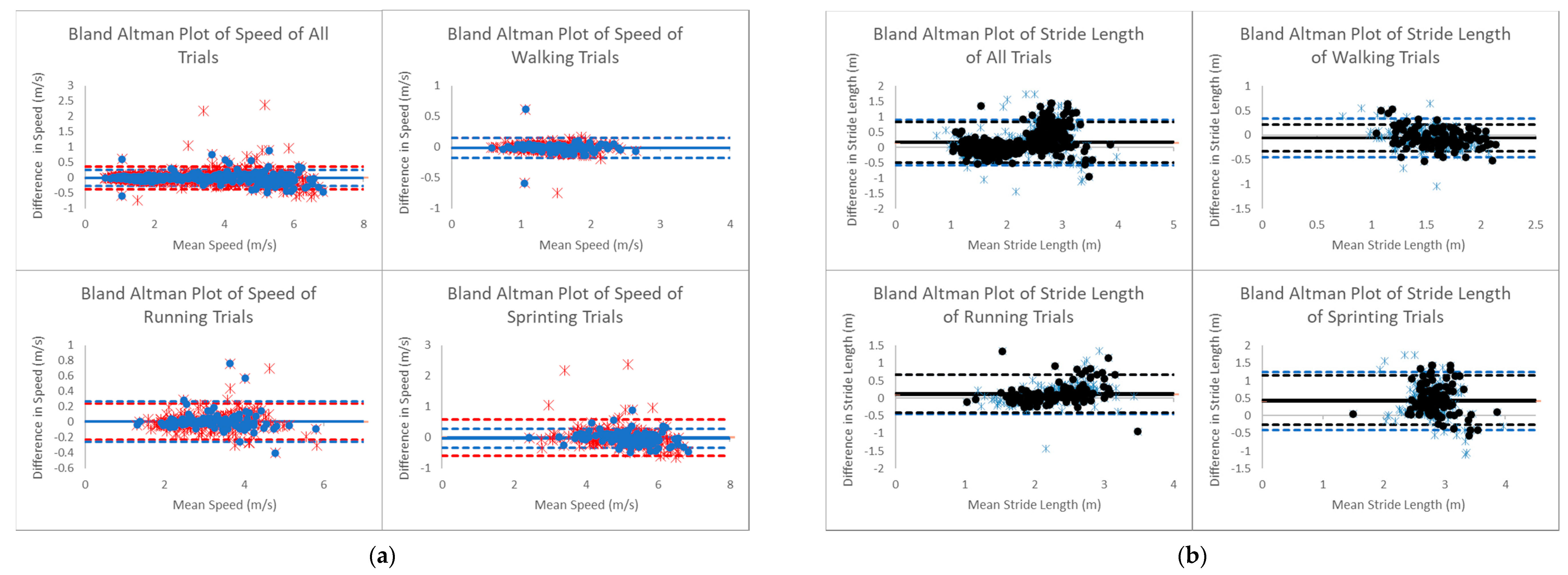
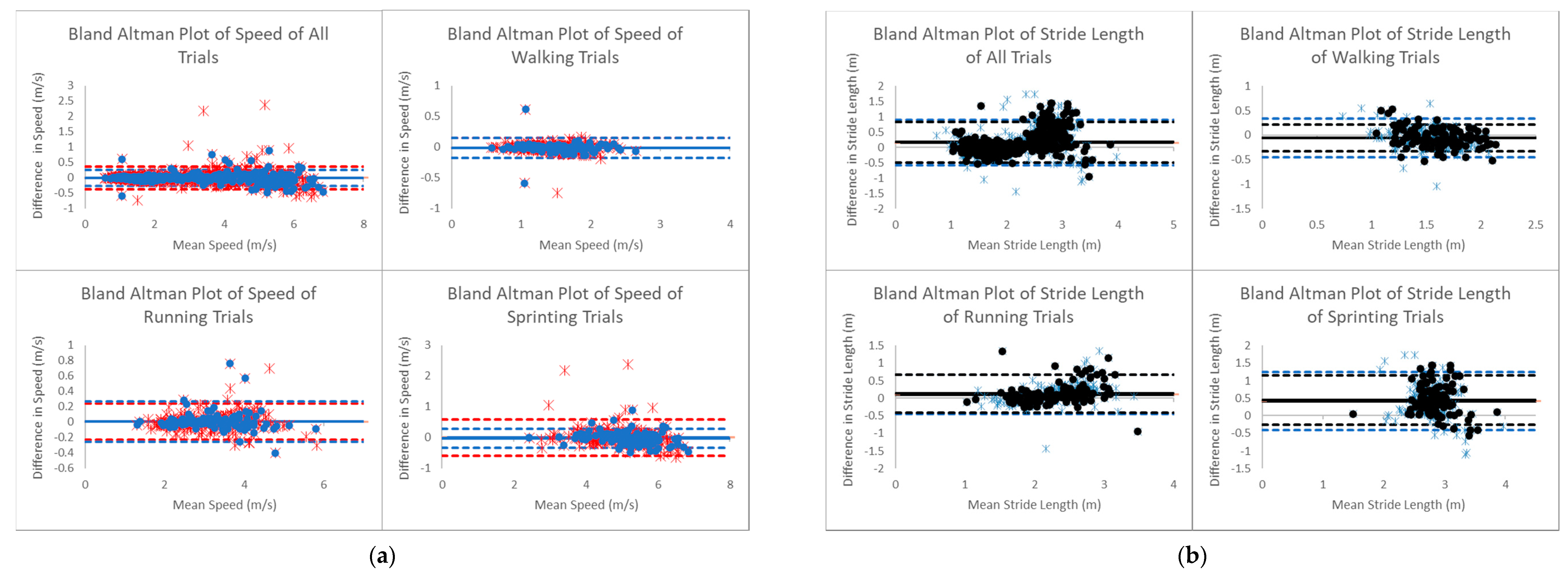
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Carling, C.; Bloomfield, J.; Nelsen, L.; Reilly, T. The role of motion analysis in elite soccer. Sports Med. 2008, 38, 839–862. [Google Scholar] [CrossRef]
- Whiteley, R.; van Dyk, N.; Wangensteen, A.; Hansen, C. Clinical implications from daily physiotherapy examination of 131 acute hamstring injuries and their association with running speed and rehabilitation progression. Br. J. Sports Med. 2018, 52, 303–310. [Google Scholar] [CrossRef]
- Higginson, B.K. Methods of running gait analysis. Curr. Sports Med. 2009, 8, 136–141. [Google Scholar] [CrossRef] [Green Version]
- Varley, M.C.; Jaspers, A.; Helsen, W.F.; Malone, J.J. Methodological considerations when quantifying high-intensity efforts in team sport using global positioning system technology. Int. J. Sport Physiol. 2017, 12, 1–25. [Google Scholar] [CrossRef] [PubMed]
- Kawabata, M.; Goto, K.; Fukusaki, C.; Sasaki, K.; Hihara, E.; Mizushina, T.; Ishii, N. Acceleration patterns in the lower and upper trunk during running. J. Sports Sci. 2013, 31, 1841–1853. [Google Scholar] [CrossRef]
- Hightower, J.; Borriello, G. Location systems for ubiquitous computing. Comput. J. 2001, 34, 57–66. [Google Scholar] [CrossRef] [Green Version]
- Siciliano, B.; Khatib, O. Inertial Sensors, GPS, and Odometry. In Handbook of Robotics; Springer International Publishing: New York, NY, USA, 2016; pp. 477–490. [Google Scholar] [CrossRef]
- Foxlin, E.M.; Harrington, M.; Altshuler, Y. Miniature six-DOF inertial system for tracking HMDs. In Proceedings of the Aerospace/Defense Sensing and Controls, Orlando, FL, USA, 13 April 1998. [Google Scholar] [CrossRef]
- De Ruiter, C.J.; Verdijk, P.W.; Werker, W.; Zuidema, M.J.; de Haan, A. Stride frequency in relation to oxygen consumption in experienced and novice runners. Eur. J. Sport Sci. 2014, 14, 251–258. [Google Scholar] [CrossRef]
- Pino-Ortega, J.; Arcos, A.L.; Gantois, P.; Clemente, F.M.; Nakamura, F.Y.; Rico-González, M. The Influence of Antenna Height on the Measurement of Collective Variables Using an Ultra-Wide Band Based Local Positioning System in Team Sports. Sensors 2021, 21, 2424. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Pobiruchin, M.; Suleder, J.; Zowalla, R.; Wiesner, M. Accuracy and adoption of wearable technology used by active citizens: A marathon event field study. JMIR mHealth uHealth 2017, 5, e24. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Clermont, C.A.; Duffett-Leger, L.; Hettinga, B.A.; Ferber, R. Runners’ Perspectives on ‘Smart’wearable technology and its use for preventing injury. Int. J. Hum. Comput. Int. 2020, 36, 31–40. [Google Scholar] [CrossRef]
- Jennings, D.; Cormack, S.; Coutts, A.J.; Boyd, L.; Aughey, R.J. The validity and reliability of GPS units for measuring distance in team sport specific running patterns. Int. J. Sport Physiol. 2010, 5, 328–341. [Google Scholar] [CrossRef] [Green Version]
- Sypniewski, J. The DSP algorithms for locally deployable RF tracking system. In Proceedings of the International Conference on Signal Processing Applications and Technology, Dallas, TX, USA, 16 October 2000. [Google Scholar]
- Bastida Castillo, A.; Gómez Carmona, C.D.; De la Cruz Sánchez, E.; Pino Ortega, J. Accuracy, intra-and inter-unit reliability, and comparison between GPS and UWB-based position-tracking systems used for time–motion analyses in soccer. Eur. J. Sport Sci. 2018, 18, 450–457. [Google Scholar] [CrossRef]
- Leser, R.; Baca, A.; Ogris, G. Local positioning systems in (game) sports. Sensors 2011, 11, 9778–9797. [Google Scholar] [CrossRef] [Green Version]
- Stevens, T.G.; de Ruiter, C.J.; van Niel, C.; van de Rhee, R.; Beek, P.J.; Savelsbergh, G.J. Measuring acceleration and deceleration in soccer-specific movements using a local position measurement (LPM) system. Int. J. Sport Physiol. 2014, 9, 446–456. [Google Scholar] [CrossRef]
- Benson, L.C.; Clermont, C.A.; Watari, R.; Exley, T.; Ferber, R. Automated accelerometer-based gait event detection during multiple running conditions. Sensors 2019, 19, 1483. [Google Scholar] [CrossRef] [Green Version]
- Giarré, L.; Pascucci, F.; Morosi, S.; Martinelli, A. Improved PDR localization via UWB-anchor based on-line calibration. In Proceedings of the 2018 IEEE 4th International Forum on Research and Technology for Society and Industry (RTSI), Palermo, Italy, 10 September 2018. [Google Scholar]
- Murphy, R.R. Biological and cognitive foundations of intelligent sensor fusion. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 1996, 26, 42–51. [Google Scholar] [CrossRef]
- Li, X.; He, J.; Xu, L.; Wang, Q. The effect of multipath and NLOS on TOA ranging error and energy based on UWB. In Proceedings of the International Conference on Consumer Electronics-Taiwan (ICCE-TW), Nantou County, Taiwan, 27 May 2016. [Google Scholar]
- Zijlstra, W.; Hof, A.L. Assessment of spatio-temporal gait parameters from trunk accelerations during human walking. Gait Posture 2003, 18, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Al Haddad, H.; Simpson, B.M.; Buchheit, M.; Di Salvo, V.; Mendez-Villanueva, A. Peak match speed and maximal sprinting speed in young soccer players: Effect of age and playing position. Int. J. Sports Physiol. Perform. 2015, 10, 888–896. [Google Scholar] [CrossRef] [PubMed]
- Tuttle, W.M. Relationship of Maximal Strength and Relative Stride Length in Sprinters. Ph.D. Thesis, Indiana State University, Terre Haute, IN, USA, August 2018. [Google Scholar]
- Bland, J.M.; Altman, D. Statistical methods for assessing agreement between two methods of clinical measurement. Lancet 1986, 327, 307–310. [Google Scholar] [CrossRef]
- Serpiello, F.R.; Hopkins, W.G.; Barnes, S.; Tavrou, J.; Duthie, G.M.; Aughey, R.J.; Ball, K. Validity of an ultra-wideband local positioning system to measure locomotion in indoor sports. J. Sports Sci. 2018, 36, 1727–1733. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Luteberget, L.S.; Spencer, M.; Gilgien, M. Validity of the Catapult ClearSky T6 local positioning system for team sports specific drills, in indoor conditions. Front. Physiol. 2018, 9, 115. [Google Scholar] [CrossRef] [Green Version]
- Song, Z.; Jiang, G.; Huang, C. A Survey on Indoor Positioning Technologies. In Theoretical and Mathematical Foundations of Computer Science; Springer: Heidelberg, Germany, 2011; pp. 198–206. [Google Scholar]
- Muñoz-López, A.; Granero-Gil, P.; Pino-Ortega, J.; De Hoyo, M. The validity and reliability of a 5-hz GPS device for quantifying athletes’ sprints and movement demands specific to team sports. J. Hum. Sport Exer. 2017, 12, 156–166. [Google Scholar] [CrossRef]
- Gonaus, C.; Müller, E. Using physiological data to predict future career progression in 14- to 17-year-old Austrian soccer academy players. J. Sports Sci. 2012, 30, 1673–1682. [Google Scholar] [CrossRef]
- Monaghan, K.; Delahunt, E.; Caulfield, B. Increasing the number of gait trial recordings maximises intra-rater reliability of the CODA motion analysis system. Gait Posture 2007, 25, 303–315. [Google Scholar] [CrossRef]
- Fischer, T.W.; Kelleci, B.; Shi, K.; Lker, A.; Serpedin, E. An analog approach to suppressing in-band narrow-band interference in UWB receivers. IEEE Trans. Circuits Syst. I Reg. Pap. 2007, 54, 941–950. [Google Scholar] [CrossRef]
- Fleureau, A.; Lacome, M.; Buchheit, M.; Couturier, A.; Rabita, G. Validity of an ultra-wideband local positioning system to assess specific movements in handball. Biol. Sport 2020, 37, 351–357. [Google Scholar] [CrossRef]
- Frencken, W.G.; Lemmink, K.A.; Delleman, N.J. Soccer-specific accuracy and validity of the local position measurement (LPM) system. J. Sci. Med. Sport 2010, 13. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| All Trials | |||
|---|---|---|---|
| Anomalies removed | Anomalies not removed | ||
| Bias (m/s) | −0.01 | Bias (m/s) | 4.99 × 10−3 |
| St. Dev (m/s) | 0.13 | St. Dev (m/s) | 0.19 |
| Lower LOA (m/s) | −0.27 | Lower LOA (m/s) | −0.38 |
| Upper LOA (m/s) | 0.25 | Upper LOA (m/s) | 0.37 |
| Mean Range (m/s) | 0.58–6.84 | Mean Range (m/s) | 0.58–6.84 |
| Number of Data Points below Lower LOA | 14 | Number of Data Points below Lower LOA | 16 |
| Number of Data Points above Upper LOA | 11 | Number of Data Points above Upper LOA | 16 |
| Walk | |||
| Bias (m/s) | −0.01 | Bias (m/s) | −0.01 |
| St. Dev (m/s) | 0.08 | St. Dev (m/s) | 0.08 |
| Lower LOA (m/s) | −0.18 | Lower LOA (m/s) | −0.18 |
| Upper LOA (m/s) | 0.15 | Upper LOA (m/s) | 0.15 |
| Mean Range (m/s) | 0.58–2.65 | Mean Range (m/s) | 0.58–2.65 |
| Number of Data Points below Lower LOA | 1 | Number of Data Points below Lower LOA | 3 |
| Number of Data Points above Upper LOA | 1 | Number of Data Points above Upper LOA | 2 |
| Run | |||
| Bias (m/s) | 0.01 | Bias (m/s) | 4.16 × 10−3 |
| St. Dev (m/s) | 0.13 | St. Dev (m/s) | 0.12 |
| Lower LOA (m/s) | −0.25 | Lower LOA (m/s) | −0.23 |
| Upper LOA (m/s) | 0.27 | Upper LOA (m/s) | 0.24 |
| Mean Range (m/s) | 1.31–5.81 | Mean Range (m/s) | 1.31–5.83 |
| Number of Data Points below Lower LOA | 1 | Number of Data Points below Lower LOA | 6 |
| Number of Data Points above Upper LOA | 3 | Number of Data Points above Upper LOA | 6 |
| Sprint | |||
| Bias (m/s) | −0.03 | Bias (m/s) | −0.01 |
| St. Dev (m/s) | 0.16 | St. Dev (m/s) | 0.30 |
| Lower LOA (m/s) | −0.33 | Lower LOA (m/s) | −0.59 |
| Upper LOA (m/s) | 0.28 | Upper LOA (m/s) | 0.58 |
| Mean Range (m/s) | 2.42–6.84 | Mean Range (m/s) | 2.42–6.84 |
| Number of Data Points below Lower LOA | 8 | Number of Data Points below Lower LOA | 2 |
| Number of Data Points above Upper LOA | 7 | Number of Data Points above Upper LOA | 7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh, P.; Esposito, M.; Barrons, Z.; Clermont, C.A.; Wannop, J.; Stefanyshyn, D. Measuring Gait Velocity and Stride Length with an Ultrawide Bandwidth Local Positioning System and an Inertial Measurement Unit. Sensors 2021, 21, 2896. https://doi.org/10.3390/s21092896
Singh P, Esposito M, Barrons Z, Clermont CA, Wannop J, Stefanyshyn D. Measuring Gait Velocity and Stride Length with an Ultrawide Bandwidth Local Positioning System and an Inertial Measurement Unit. Sensors. 2021; 21(9):2896. https://doi.org/10.3390/s21092896
Chicago/Turabian StyleSingh, Pratham, Michael Esposito, Zach Barrons, Christian A. Clermont, John Wannop, and Darren Stefanyshyn. 2021. "Measuring Gait Velocity and Stride Length with an Ultrawide Bandwidth Local Positioning System and an Inertial Measurement Unit" Sensors 21, no. 9: 2896. https://doi.org/10.3390/s21092896
APA StyleSingh, P., Esposito, M., Barrons, Z., Clermont, C. A., Wannop, J., & Stefanyshyn, D. (2021). Measuring Gait Velocity and Stride Length with an Ultrawide Bandwidth Local Positioning System and an Inertial Measurement Unit. Sensors, 21(9), 2896. https://doi.org/10.3390/s21092896