
A Hydraulic Pump Fault Diagnosis Method Based on the Modified Ensemble Empirical Mode Decomposition and Wavelet Kernel Extreme Learning Machine Methods

Abstract
1. Introduction
2. Basic Principles of Modified Ensemble Empirical Mode Decomposition (MEEMD) and AutoRegressive (AR) Spectrum Method
2.1. Basic Principles of MEEMD Method
2.2. Permutation Entropy
2.3. AR Spectrum Method
3. Wavelet Kernel Extreme Learning Machine
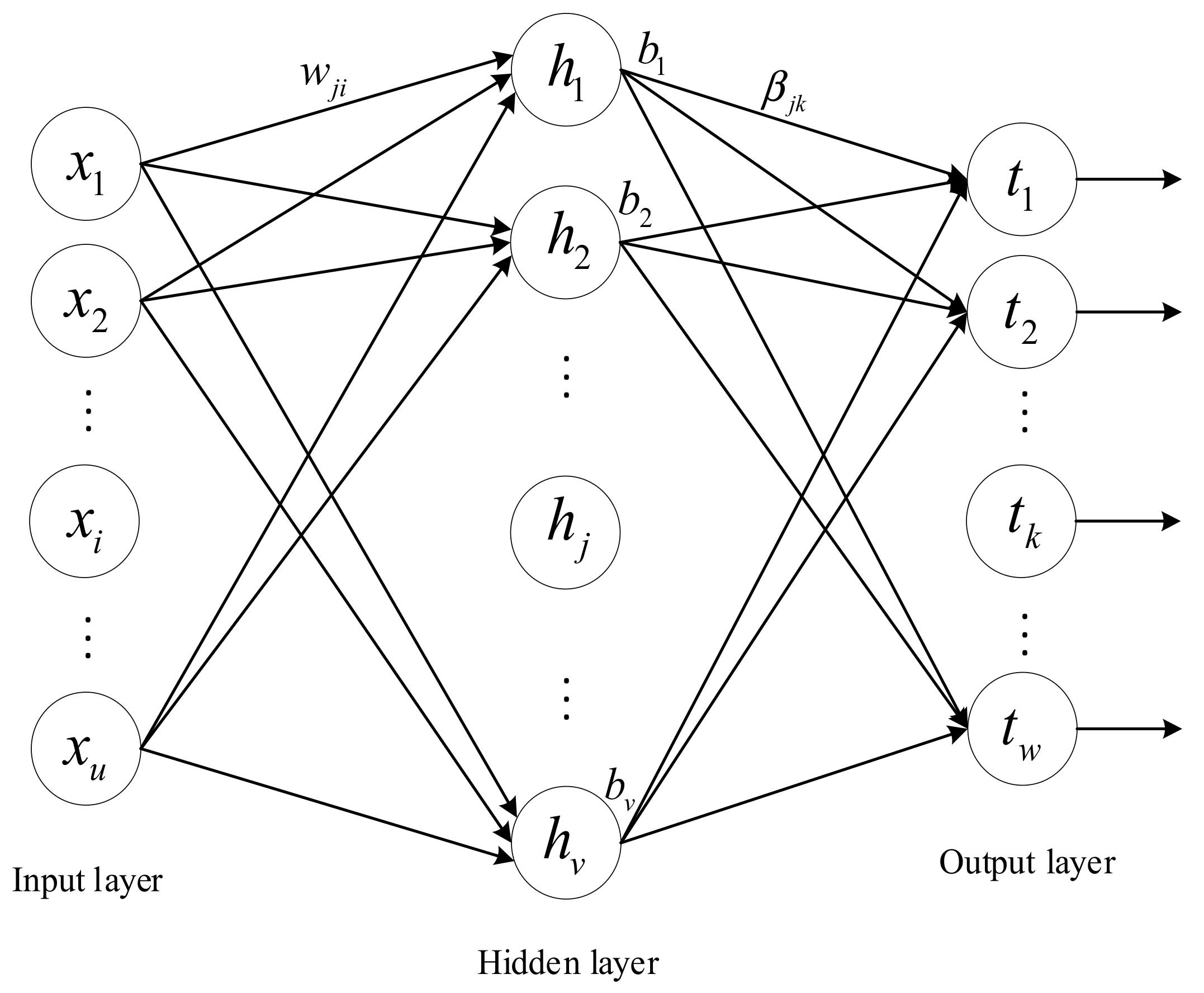
3.1. Extreme Learning Machine Theory
3.2. Theory of Kernel Extreme Learning Machine
3.3. Wavelet Kernel Extreme Learning Machine Theory
- (1)
- The number of input neurons and output neurons are determined, according to the number of features and categories, and the WKELM classifier model is established;
- (2)
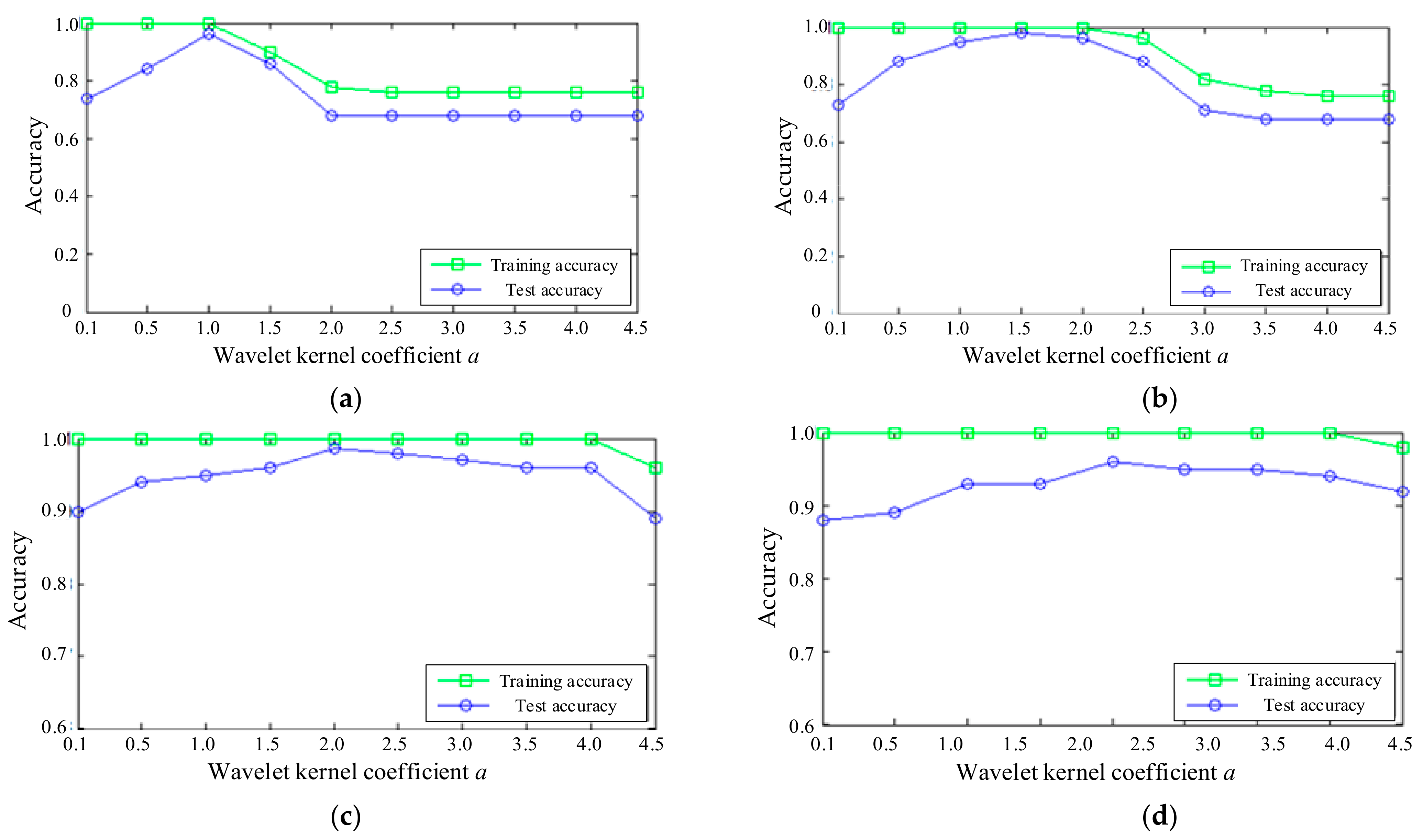
- Set the value of the penalty factor C and the parameter of the wavelet kernel a;
- (3)
- The input characteristics of the training samples and their corresponding output categories are used to train the WKELM;
- (4)
- The features of the test sample are used as the input for the WKELM and, then, the trained WKELM classifier is used for the category decision.
4. Fault Feature Extraction Method of Axial Piston Pump Based on MEEMD and AR Spectrum
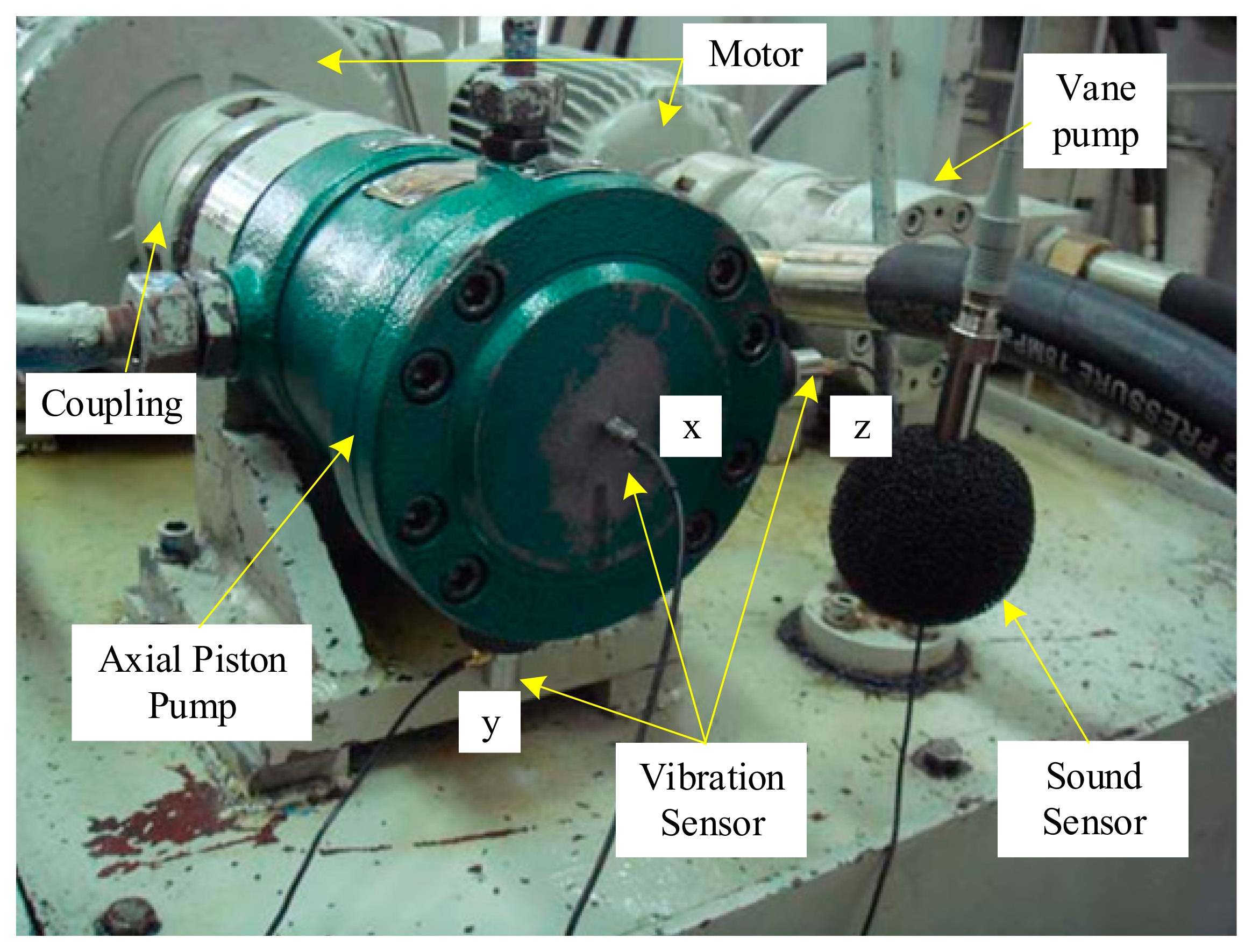
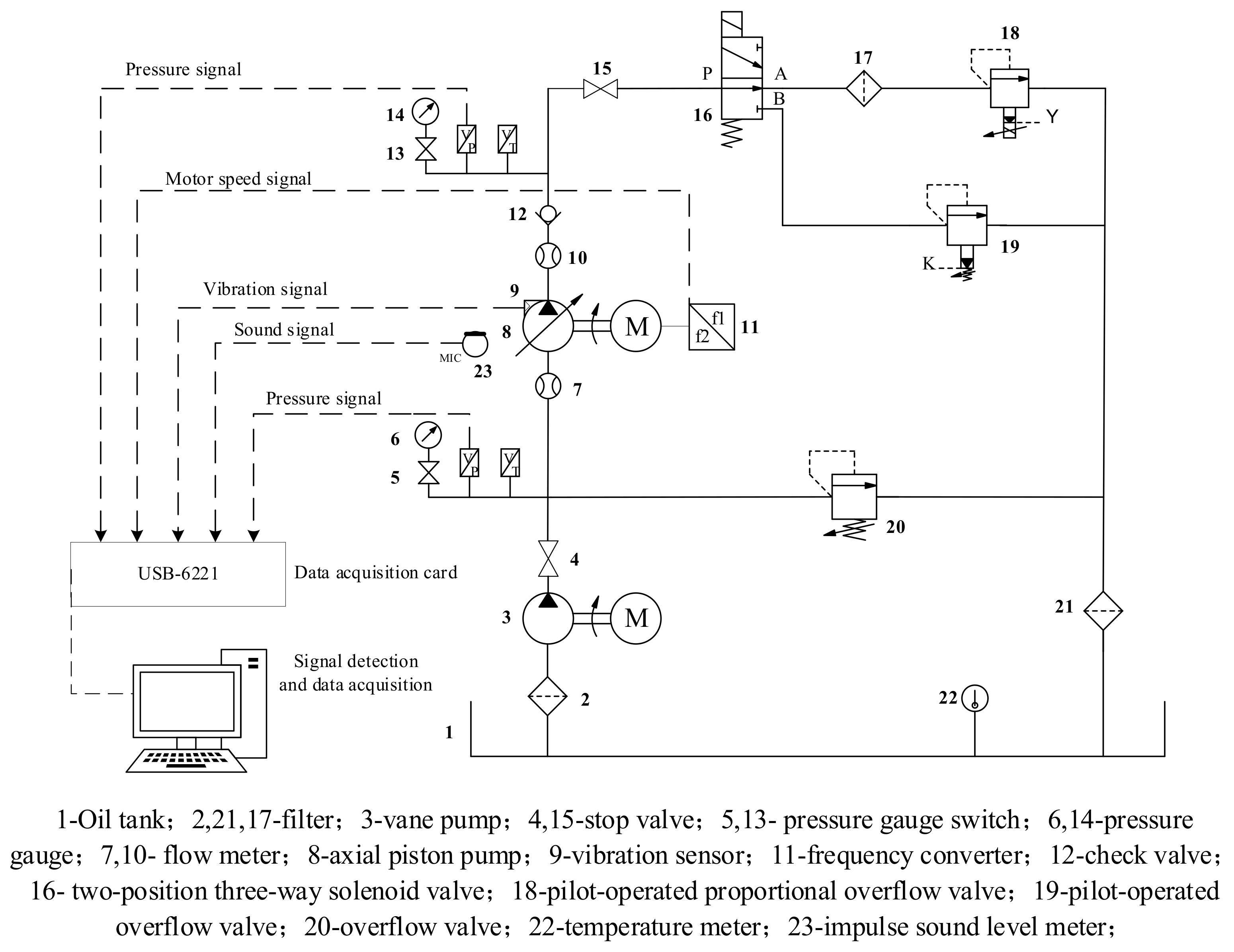
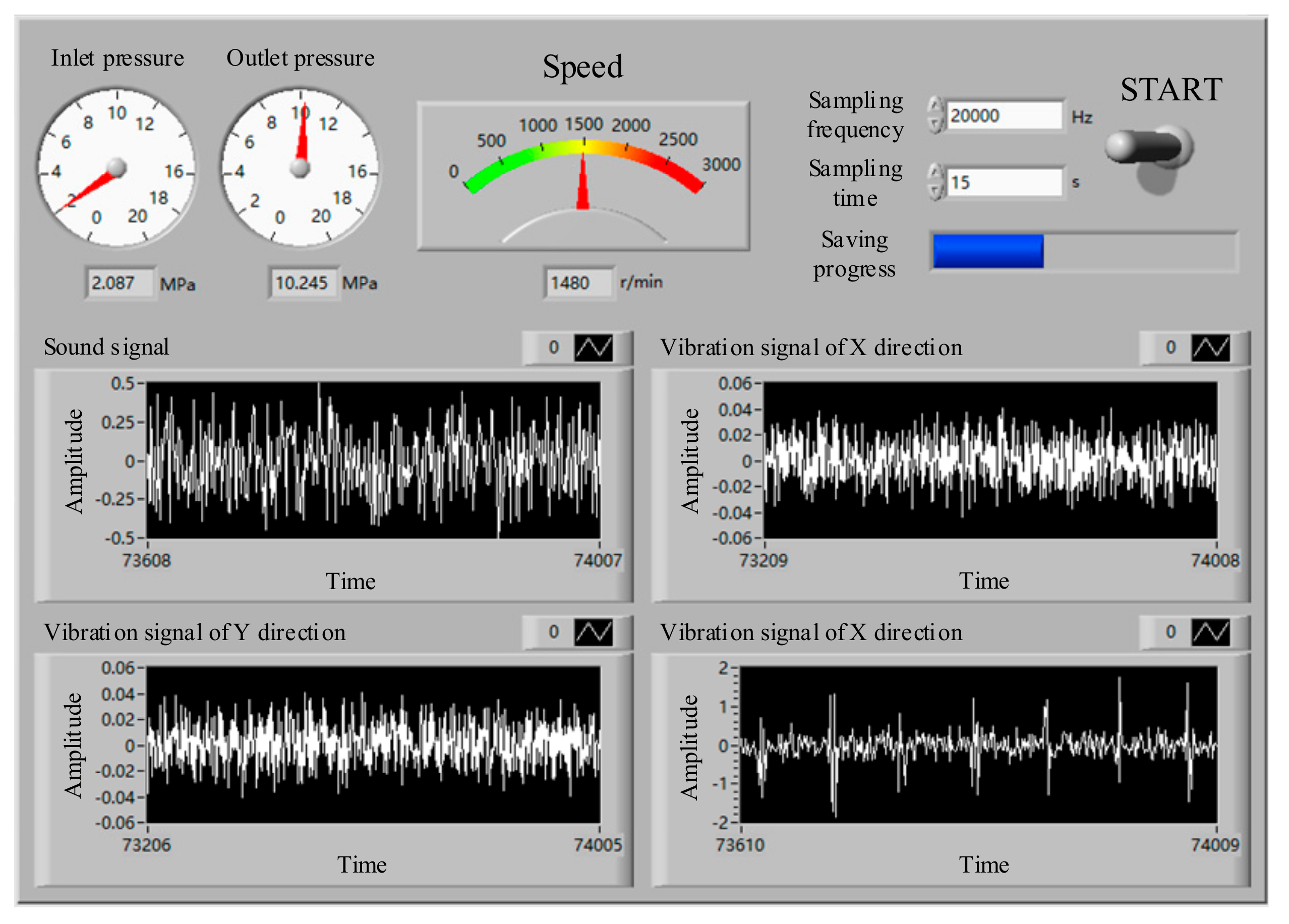
4.1. Test System and Data Acquisition
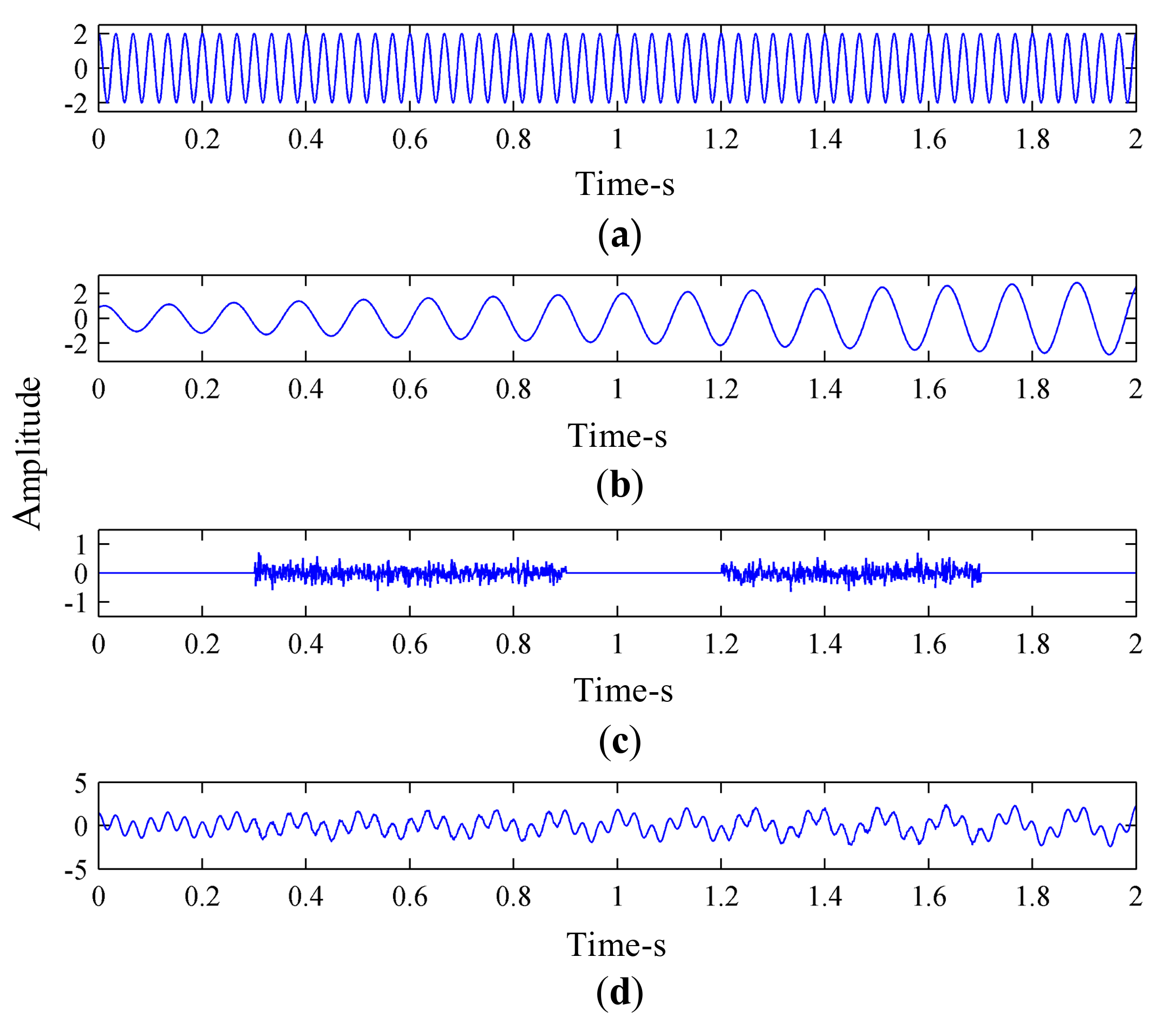
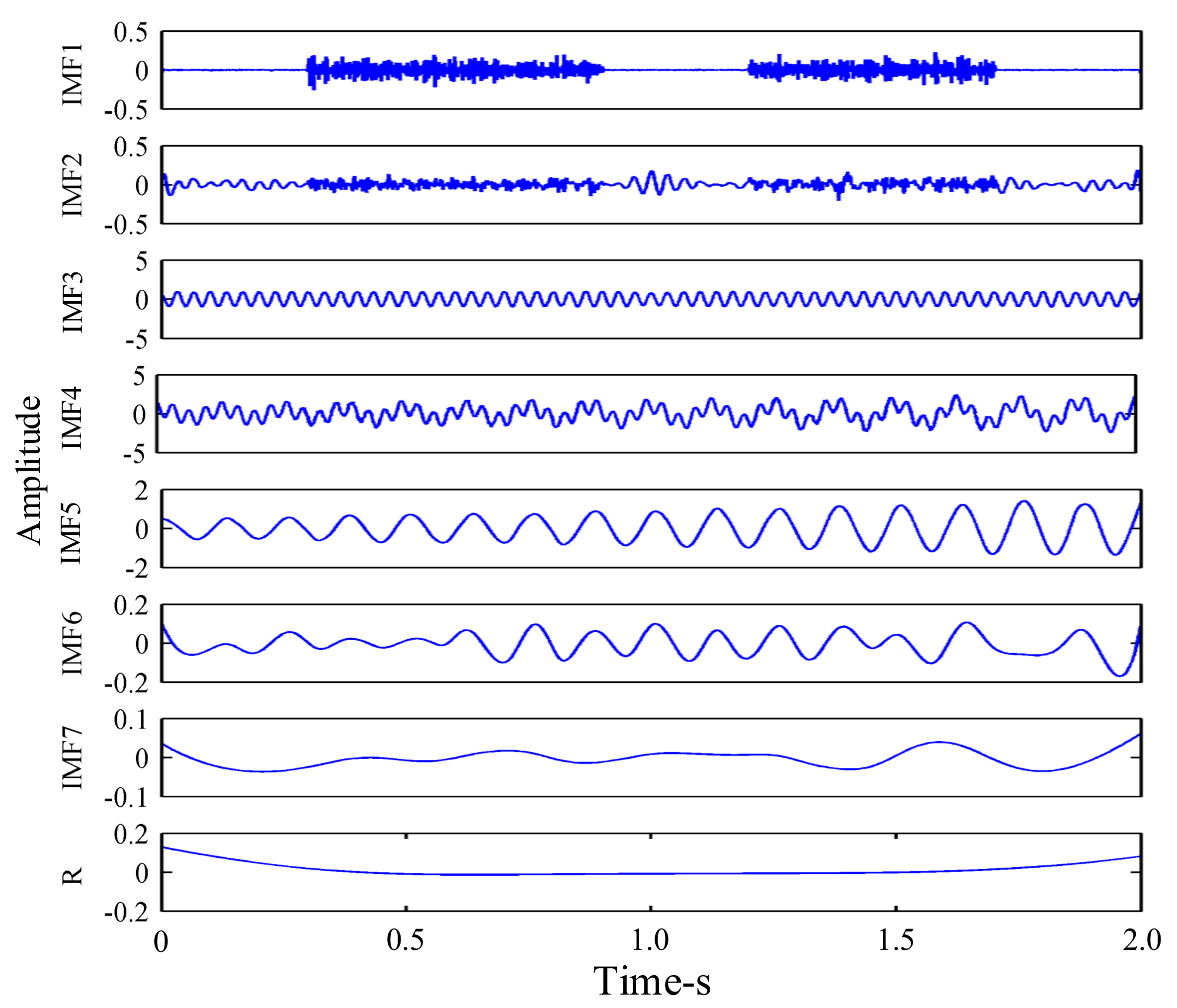
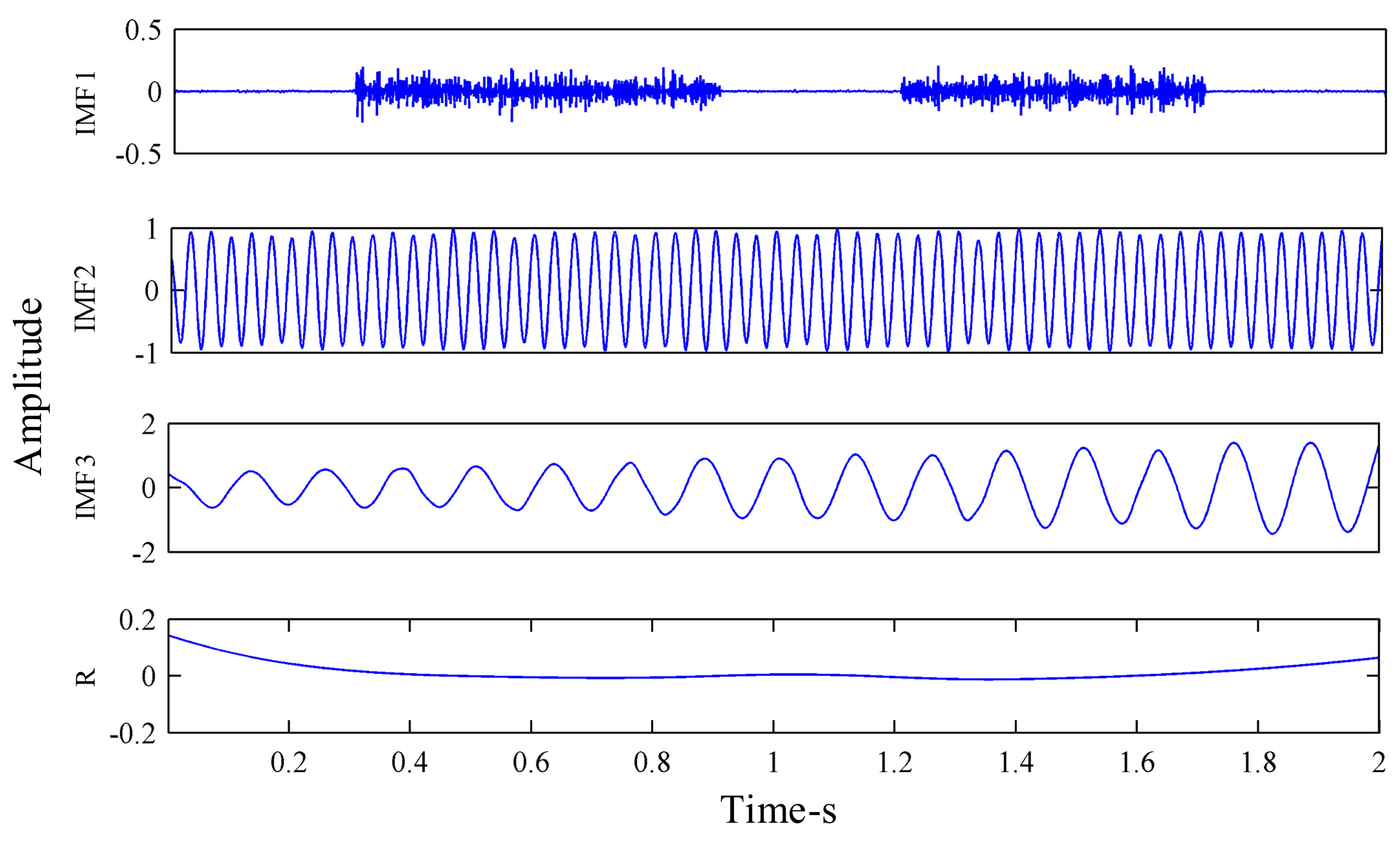
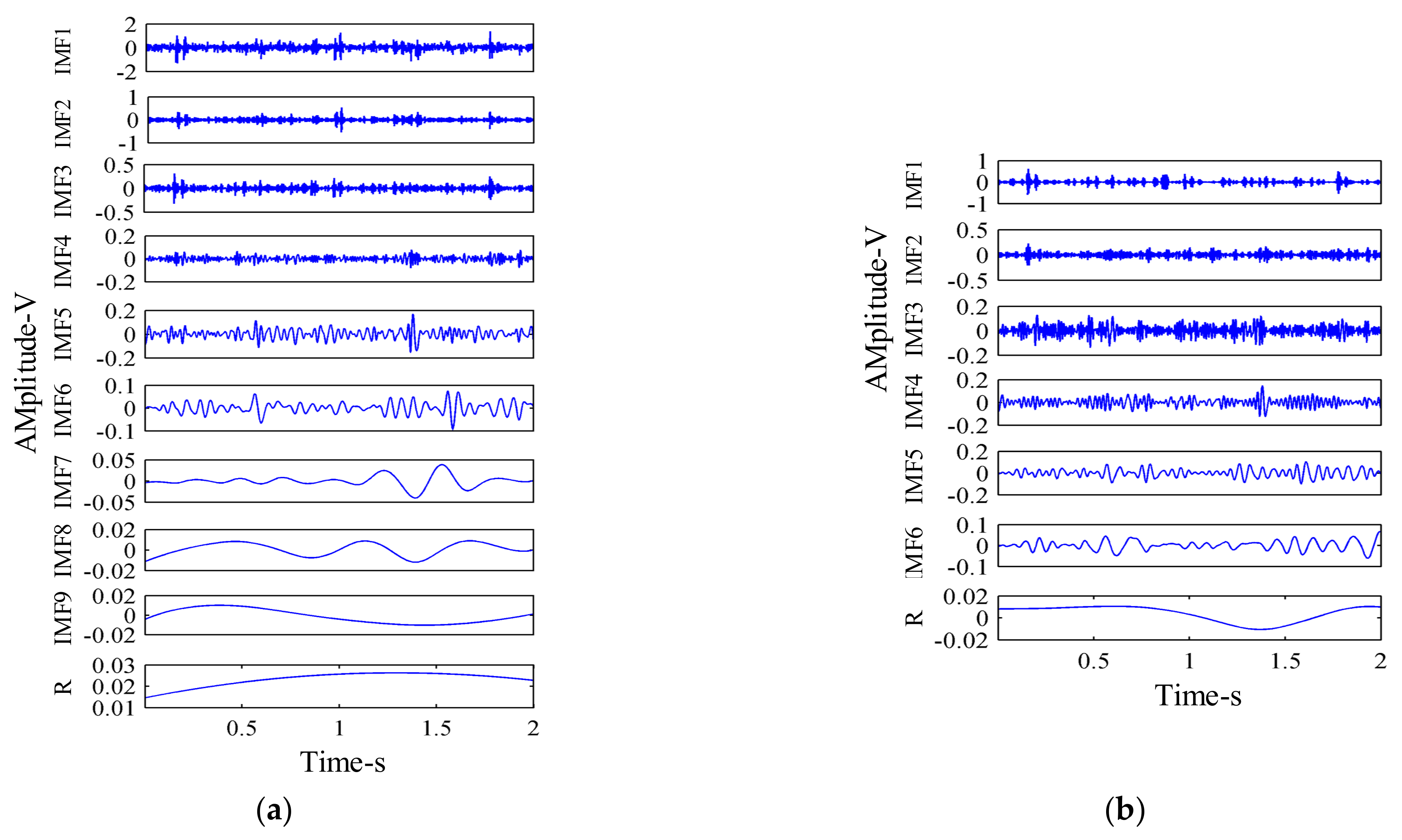
4.2. Simulation sSignal Analysis of MEEMD Method
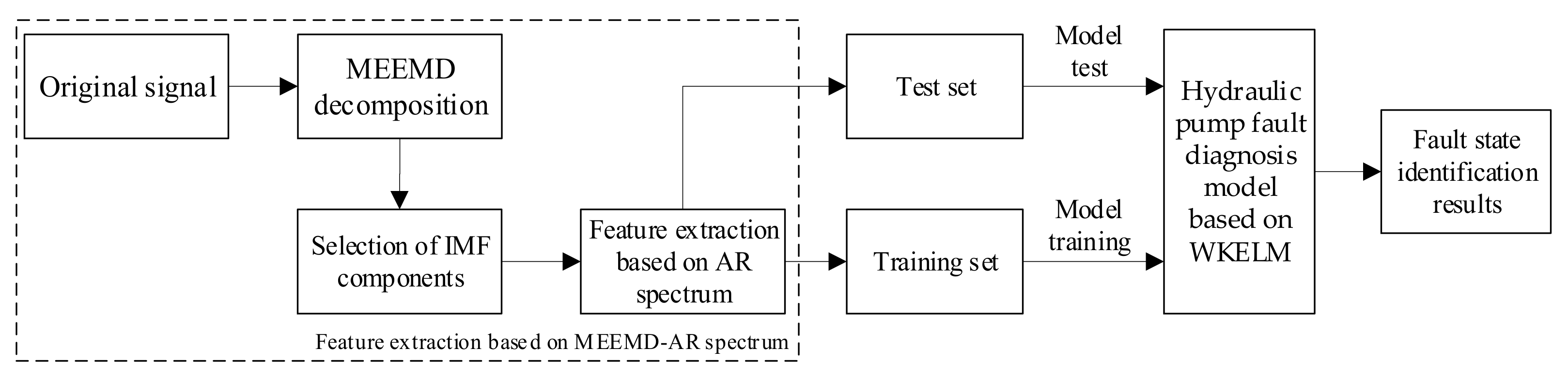
4.3. Fault Feature Extraction Process
- (1)
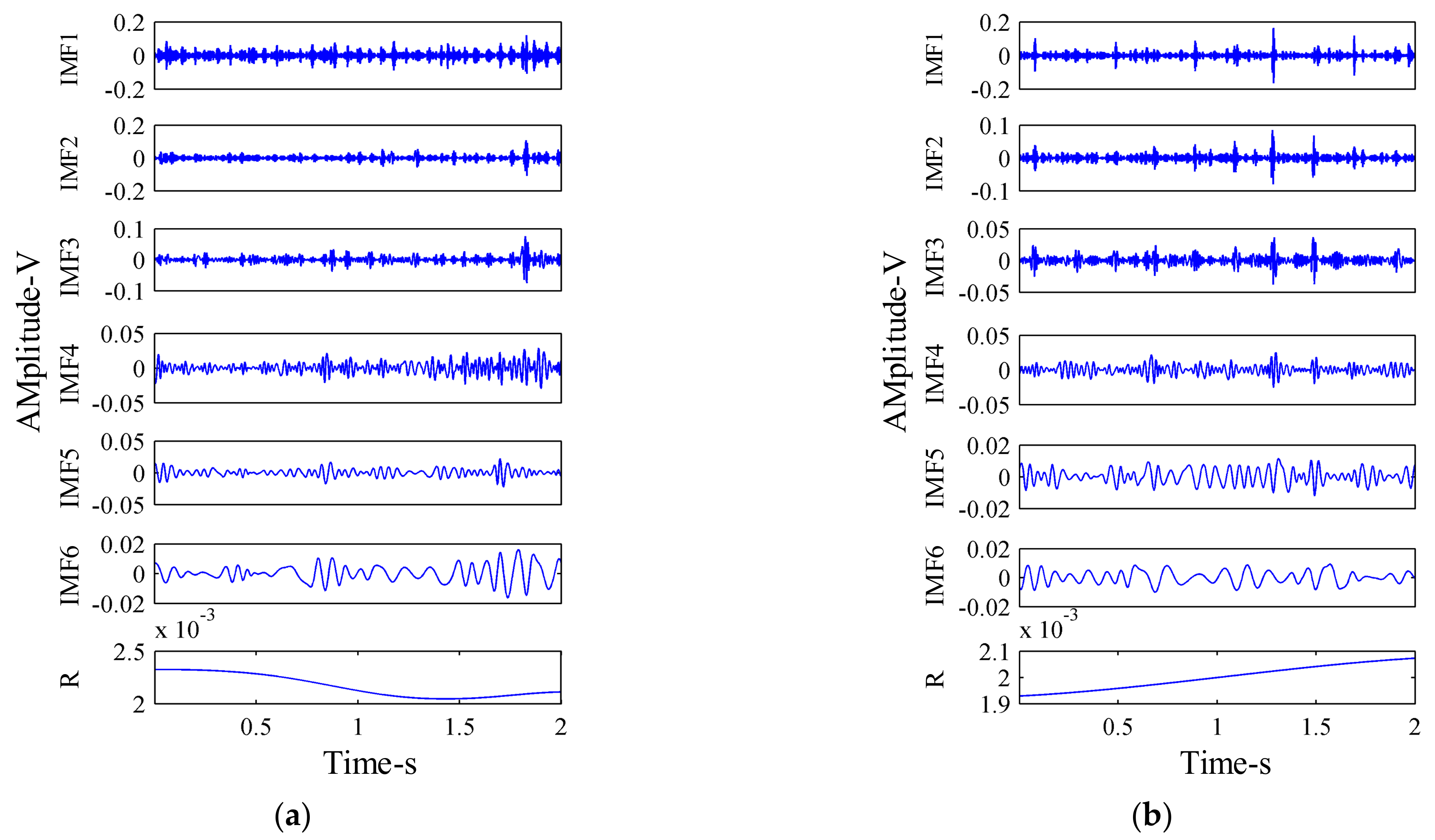
- The signal is decomposed by the MEEMD method, from which several IMF components are obtained.
- (2)
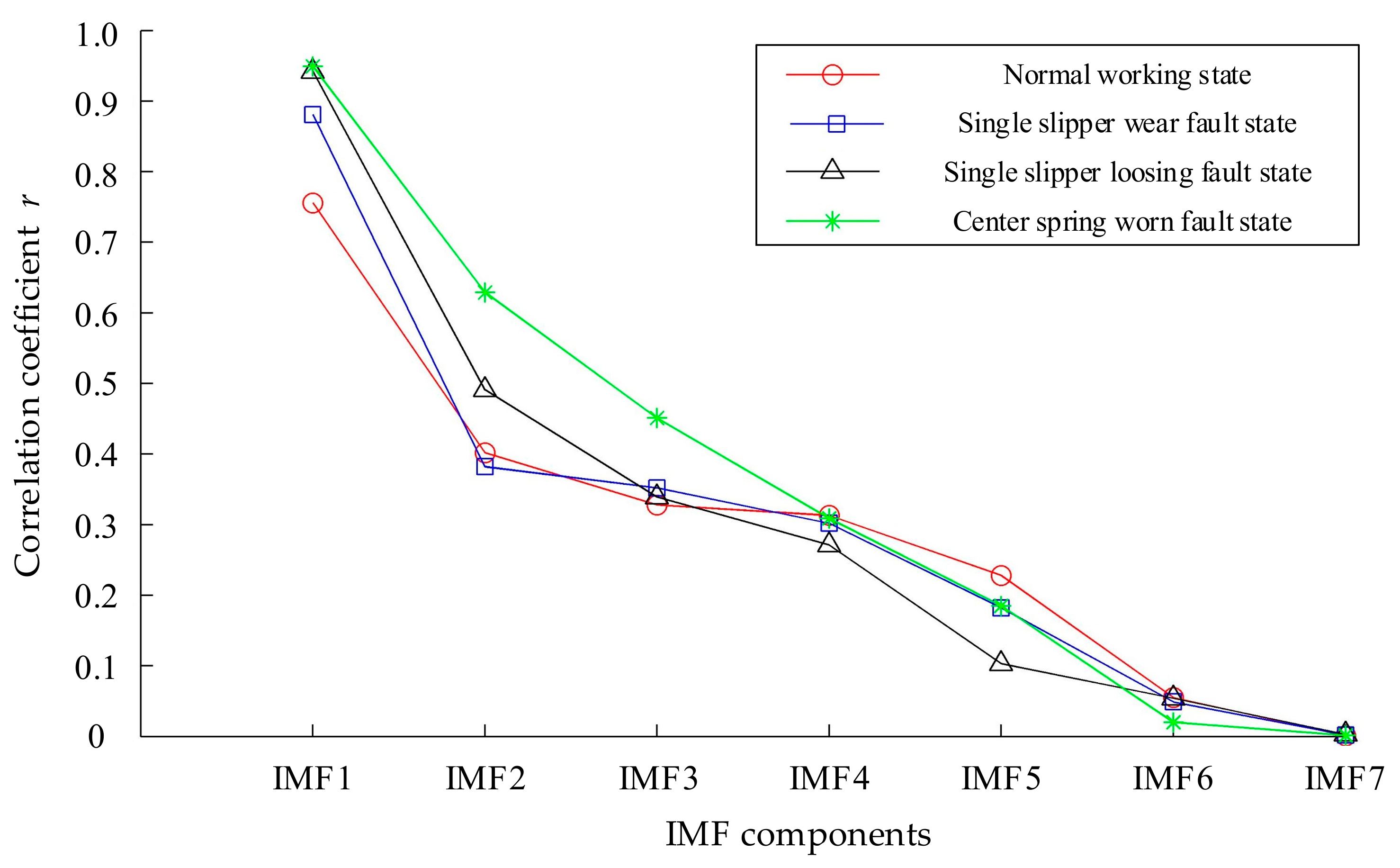
- As there may still be pseudo-components in the IMF components obtained through MEEMD decomposition, it is necessary to eliminate such components. In this paper, the pseudo-components are eliminated by the Pearson correlation coefficient method. First, the Pearson correlation coefficient between all IMF components and the original signal is calculated. Then, IMF components with large correlation coefficients are taken as the effective components. The Pearson correlation coefficient is calculated as follows:where is the original signal, is each order of IMF components, , is the signal length, is the average of , and is the average of .
- (3)
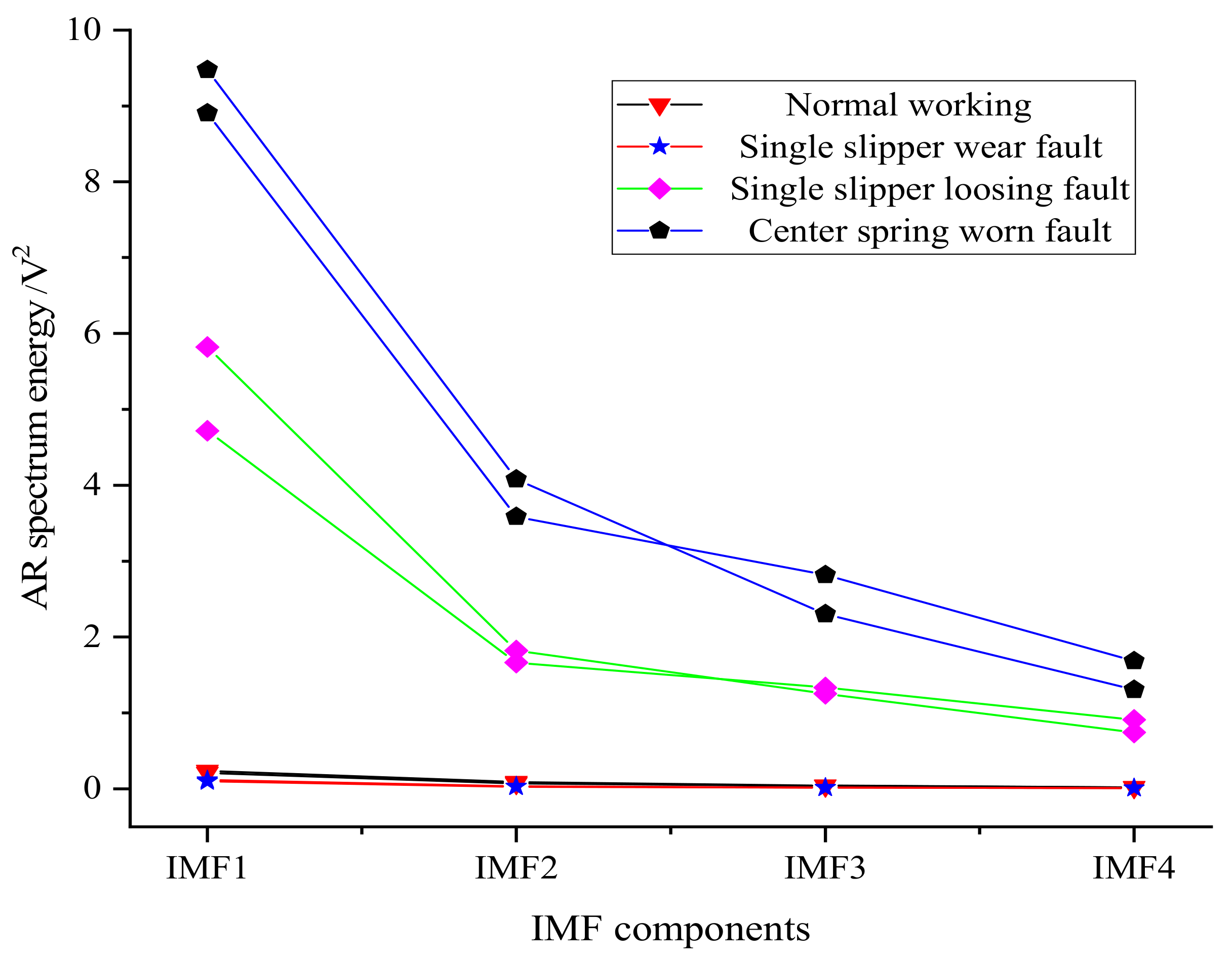
- AR spectrum estimation of the t IMF components is carried out and the AR spectrum energies of the t IMF components are calculated. After normalization, the characteristic matrix, , of the signal is composed as follows:where , , and is the AR spectrum energy of the tth IMF component of the ith sample.
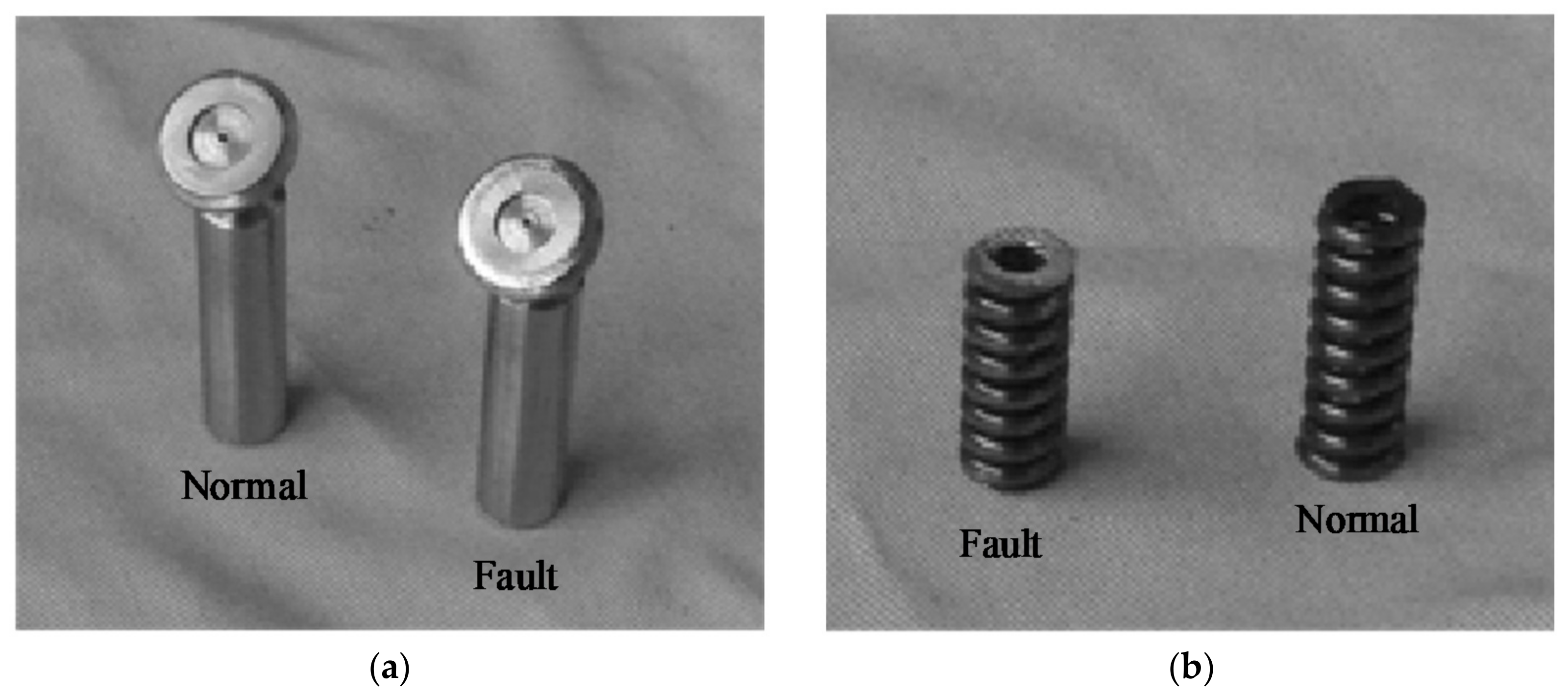
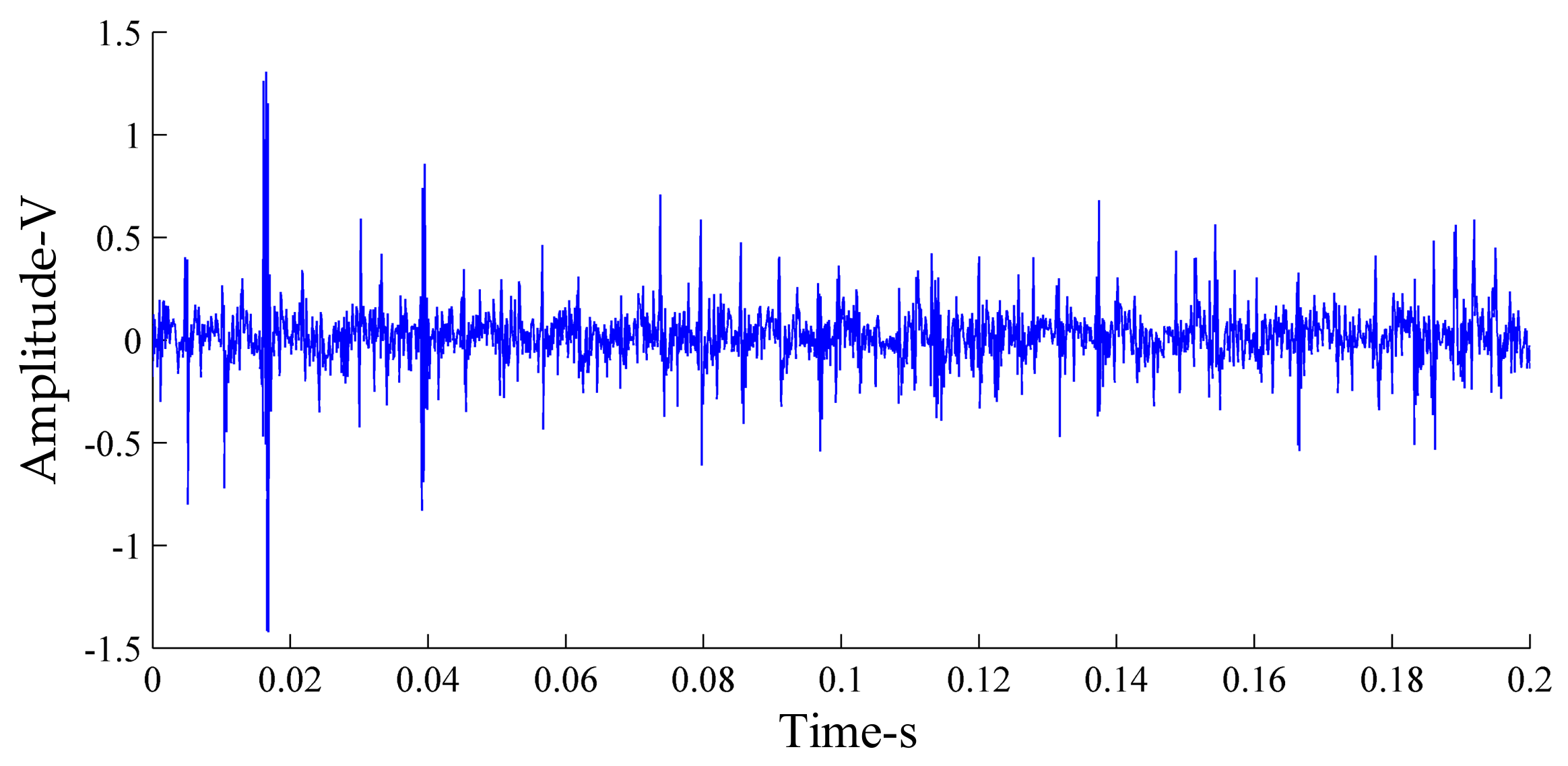
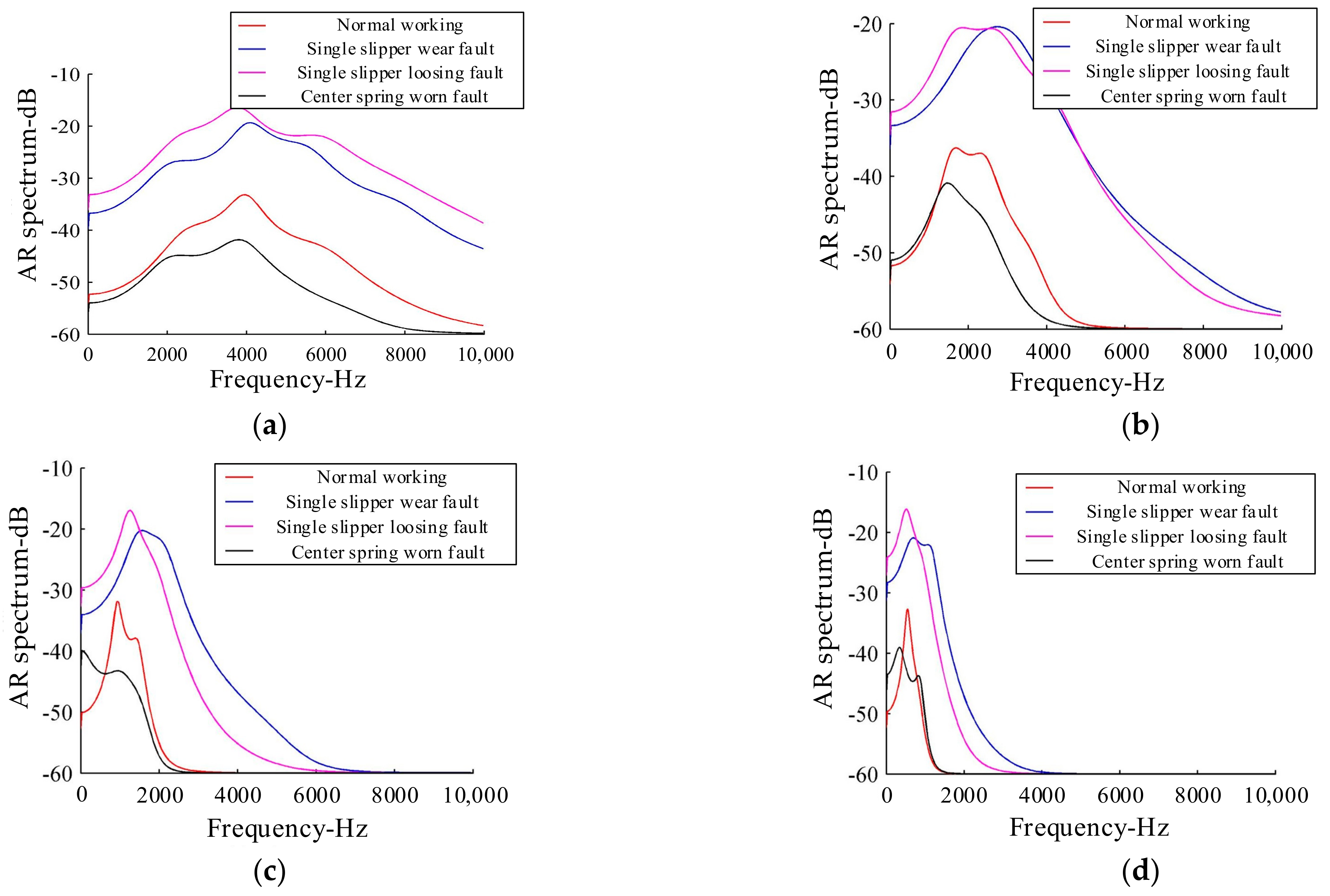
4.4. Analysis of Acquired Hydraulic Pump Signals
4.5. Fault Feature Extraction of Hydraulic Pump Based on MEEMD-AR Spectrum
5. Fault Diagnosis Method of Hydraulic Pump Based on WKELM
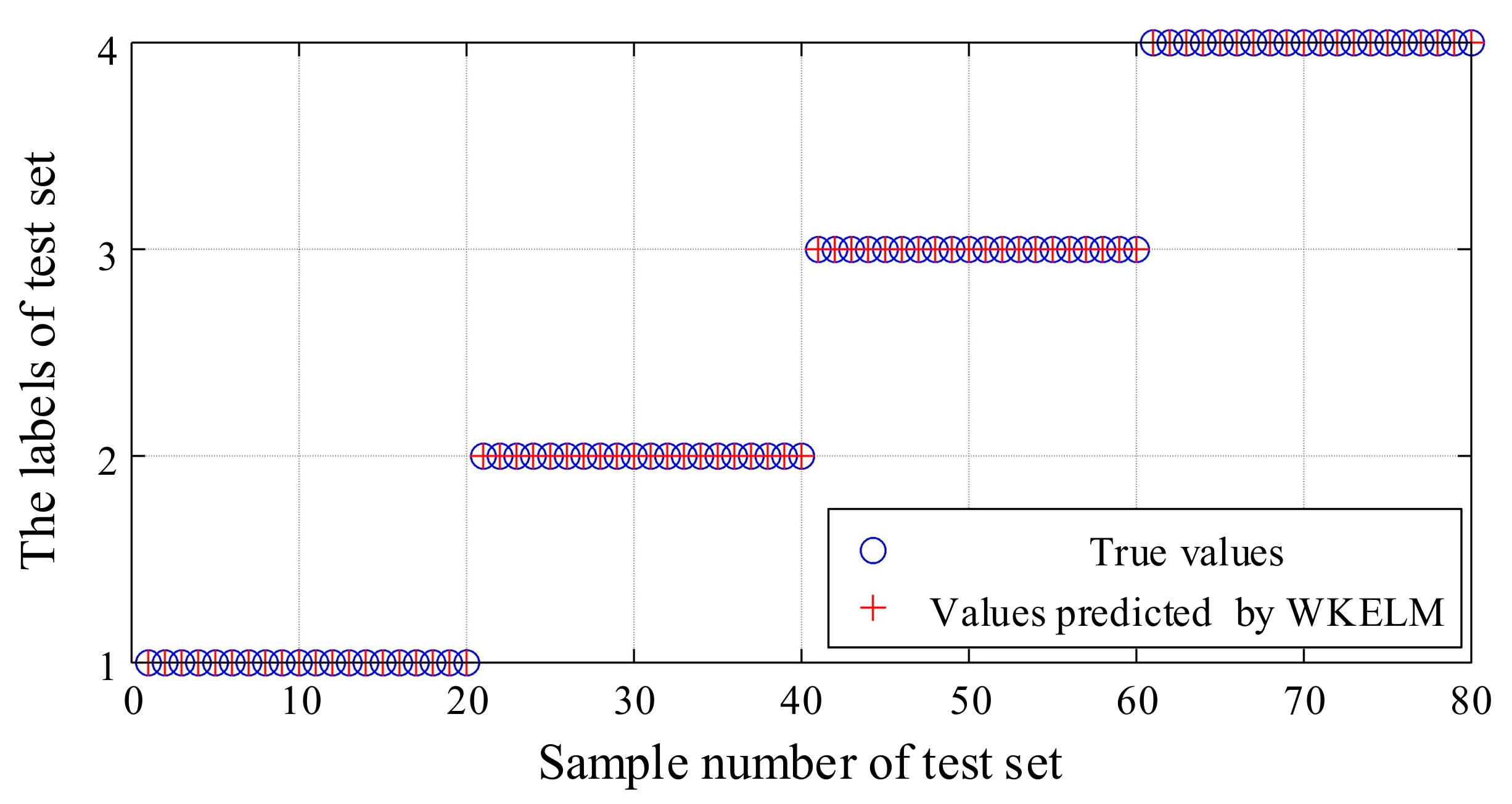
5.1. Hydraulic Pump Fault Diagnosis Based on WKELM
5.2. Comparison and Analysis of Different Hydraulic Pump Fault Diagnosis Methods
6. Conclusions
- (1)
- Compared with the EEMD method, the MEEMD method can better suppress the phenomenon of mode mixing in hydraulic pump vibration signal decomposition. At the same time, the MEEMD method has better orthogonality and fewer pseudo-components;
- (2)
- The hydraulic pump fault feature extraction method based on the MEEMD and AR spectrum methods proposed in this paper can effectively solve the problem of low efficiency inherent to traditional feature extraction methods. This method can effectively extract the fault features from the vibration signals of a hydraulic pump;
- (3)
- The WKELM method was improved and introduced for the fault diagnosis of a hydraulic pump, and a full hydraulic pump fault diagnosis method was proposed based on MEEMD–AR–WKELM integration. The diagnosis accuracy of different hydraulic pump fault states using this method was 100%. Compared with the BP, SVM, and ELM methods, the fault diagnosis method proposed in this paper was shown to have higher fault identification accuracy and faster identification speed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, C.; Sánchez, R.V.; Zurita, G.; Cerrada, M.; Cabrera, D. Fault Diagnosis for Rotating Machinery Using Vibration Measurement Deep Statistical Feature Learning. Sensors 2016, 16, 895. [Google Scholar] [CrossRef]
- Liu, T.; Luo, Z.; Huang, J.; Yan, S. A Comparative Study of Four Kinds of Adaptive Decomposition Algorithms and Their Applications. Sensors 2018, 18, 2120. [Google Scholar] [CrossRef]
- Jiang, W.; Li, Z.; Lei, Y.; Zhang, S.; Tong, X. Deep learning based rolling bearing fault diagnosis and performance degradation degree recognition method. J. Yanshan Univ. 2020, 44, 526–536. [Google Scholar] [CrossRef]
- Chen, J.; Wang, J.; Zhu, J.; Lee, T.; Silva, C. Unsupervised Cross-domain Fault Diagnosis Using Feature Representation Alignment Networks for Rotating Machinery. IEEE/ASME Trans. Mechatron. 2020, 99, 1. [Google Scholar] [CrossRef]
- Peng, X.; Chen, J. The Future Trends of Hydraulics. China Hydraul. Pneum. 2007, 3, 1–5. [Google Scholar]
- Ge, X.; Lin, Y. Current Status and Development Tendency of Hydraulic System Fault Diagnosis Technology. China Hydraul. Pneum. 2008, 7, 1–3. [Google Scholar]
- Chen, J.; Li, T.; Wang, J.; Silva, C. WSN Sampling Optimization for Signal Reconstruction Using Spatiotemporal Autoencoder. IEEE Sens. J. 2020, 99, 14290–14301. [Google Scholar] [CrossRef]
- Chen, J.; Li, T.; Wang, J.; Silva, C. Optimization of Wireless Sensor Network Deployment for Spatiotemporal Reconstruction and Prediction. Electr. Eng. Syst. Sci. 2019, 1, 1–11. [Google Scholar]
- Jiang, W.; Wang, Z.; Zhu, Y.; Hu, H.; Zhang, B. Isomap and intrinsic mode function feature energy-based multi-fault recognition method of rolling bearing. ICIC Express Lett. Part B Appl. 2016, 10, 279–285. [Google Scholar]
- Zhu, Y.; Jiang, W.; Kong, X.; Zheng, Z.; Hu, H. An Accurate Integral Method for Vibration Signal Based on Feature Information Extraction. Shock Vib. 2015, 2015. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The Empirical Mode Decomposition and the Hilbert Spectrum for Nonlinear and Non-stationary Time Series Analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Ahn, J.; Kwak, D.; Koh, B. Fault Detection of a Roller-Bearing System through the EMD of a Wavelet Denoised Signal. Sensors 2014, 14, 15022–15038. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.H.; Huang, N.E. Ensemble Empirical Mode Decomposition: A Noise-assisted Data Analysis Method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Zheng, J.; Cheng, J.; Yang, Y. Modified EEMD algorithm and its applications. J. Vib. Shock 2013, 32, 21–26, 46. [Google Scholar] [CrossRef]
- Jiang, S. Fault Diagnosis Analysis of Fan Spindle Bearing Based on CPSO-BBO Optimization SVM. Master’s Thesis, Northeast Electric Power University, Jilin, China, 2019. [Google Scholar]
- Zheng, X. Research on Blind Separation and Noise Source Identification for the Vibro-acoustic Signals of Vehicle and Engine. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2012. [Google Scholar]
- Shi, Y.; Wang, Y.; Jiang, Y.; Gao, H.; Xiang, J. Rolling Bearing Fault Diagnosis Method Based on MEEMD. Coal Mine Mach. 2014, 35, 266–268. [Google Scholar] [CrossRef]
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme Learning Machine: A New Learning Scheme of Feedforward Neural Networks. In Proceedings of the 2004 IEEE International Joint Conference on Neural Networks—Proceedings, Budapest, Hungary, 25–29 July 2004. [Google Scholar]
- Huang, G.B.; Chen, L.; Siew, C.K. Universal Approximation Using Incremental Constructive Feedforward Networks with Random Hidden Nodes. IEEE Trans. Neural Netw. Learn. Syst. 2006, 17, 879–892. [Google Scholar] [CrossRef]
- Huang, G.B.; Chen, L. Convex Incremental Extreme Learning Machine. Neurocomputing 2007, 70, 3056–3062. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, Y.; Chao, H.; Zhang, Z.; Zhang, Z. Classification of Incomplete Data Based on Evidence Theory and an Extreme Learning Machine in Wireless Sensor Networks. Sensors 2018, 18, 1046. [Google Scholar] [CrossRef]
- José, M.M.; Pablo, E.; Emilio, S.; José, D.M.; Rafael, M.; Juan, G. Regularized Extreme Learning Machine for Regression Problems. Neurocomputing 2011, 74, 3716–3721. [Google Scholar] [CrossRef]
- Bi, X.; Zhao, X.; Wang, G.; Zhang, P.; Wang, C. Distributed Extreme Learning Machine with Kernels Based on MapReduce. Neurocomputing 2015, 149, 456–463. [Google Scholar] [CrossRef]
- Cho, D.; Ham, J.; Oh, J.; Park, J.; Kim, S.; Lee, N.; Lee, B. Detection of Stress Levels from Biosignals Measured in Virtual Reality Environments Using a Kernel-Based Extreme Learning Machine. Sensors 2017, 17, 2435. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, T.; Yin, Y.; Xiao, W. Alumina Concentration Detection Based on the Kernel Extreme Learning Machine. Sensors 2017, 17, 2002. [Google Scholar] [CrossRef]
- Yang, X.; Ma, Z.; Shen, H.; Chen, H. Fault diagnosis of airflow jamming fault in double circulating fluidized bed based on multi-scale feature energy and KELM. Ciesc J. 2019, 70, 2616–2625. [Google Scholar] [CrossRef]
- Zhang, W.; Ma, Y.; Dong, Z.; Du, J. Fault diagnosis of coal mill based on PSO-KELM. Electr. Power Sci. Eng. 2018, 34, 54–58. [Google Scholar] [CrossRef]
- Pang, S.; Yang, X.; Zhang, Y.; Wei, X. Application of Deep Kernel Extreme Learning Machine in Aero Engine Components Fault Diagnosis. J. Propuls. Technol. 2017, 38, 2613–2621. [Google Scholar] [CrossRef]
- Jiang, W.; Zheng, Z.; Zhu, Y.; Li, Y. Demodulation for Hydraulic Pump Fault Signals Based on Local Mean Decomposition and Improved Adaptive Multiscale Morphology Analysis. Mech. Syst. Signal Process. 2015, 58–59, 179–205. [Google Scholar] [CrossRef]
- Zheng, X.; Hao, Z.; Lu, Z.; Yang, J. Separation of piston-slap and combustion shock excitations via MEEMD method. J. Vib. Shock 2012, 31, 109–113. [Google Scholar] [CrossRef]
- Massimiliano, Z.; Luciano, Z.; Osvaldo, A.R.; David, P. Permutation Entropy and Its Main Biomedical and Econophysics Applications: A Review. Entropy 2012, 14, 1553–1577. [Google Scholar] [CrossRef]
- Kuai, M.; Cheng, G.; Pang, Y.; Li, Y. Research of Planetary Gear Fault Diagnosis Based on Permutation Entropy of CEEMDAN and ANFIS. Sensors 2018, 18, 782. [Google Scholar] [CrossRef]
- Bandt, C.; Pompe, B. Permutation entropy: A natural complexity measure for time series. Phys. Rev. Lett. 2002, 88, 174102. [Google Scholar] [CrossRef]
- Sun, J.; Xu, X.; Liu, Y.; Zhang, T.; Li, Y. FOG Random Drift Signal Denoising Based on the Improved AR Model and Modified Sage-Husa Adaptive Kalman Filter. Sensors 2016, 16, 1073. [Google Scholar] [CrossRef]
- Jiang, W.; Li, Z.; Li, J.; Zhu, Y.; Zhang, P. Study on a Fault Identification Method of the Hydraulic Pump Based on a Combination of Voiceprint Characteristics and Extreme Learning Machine. Processes 2019, 7, 894. [Google Scholar] [CrossRef]
- He, C.; Liu, C.; Wu, Y.; Wu, T.; Chen, T. Improved Grey Wolf Optimization Algorithm for Life Prediction of Medical Lithium Batteries. J. Chongqing Norm. Univ. (Nat. Sci.) 2019, 36, 21–28. [Google Scholar] [CrossRef]
- Li, Q.; Yu, Y.; Zheng, S.; Ma, T. Short-term Power Load Forecasting Based on EWT-WKELM. Proc. CSU-EPSA 2018, 30, 83–89. [Google Scholar] [CrossRef]
- Zhang, W.; Guo, W.; Zhang, C.; Zhao, S. An Online Calibration Method for a Galvanometric System Based on Wavelet Kernel ELM. Sensors 2019, 19, 1353. [Google Scholar] [CrossRef]
- Chen, J.; Shu, T.; Li, T.; Silva, C. Deep Reinforced Learning Tree for Spatiotemporal Monitoring With Mobile Robotic Wireless Sensor Networks. IEEE Trans. Syst. Man Cybern. Syst. 2019, 1–15. [Google Scholar] [CrossRef]
- Dong, K. Improved Multi-Scale Entropy and Apply to Fault Feature Extraction and Diagnosis of Rotating Machinery. Master’s Thesis, Yanshan University, Qinhuangdao, China, 2016; pp. 60–67. [Google Scholar]
- Jiang, W.; Li, Z.; Zhang, S.; Lei, Y.; Wang, H. Fault Recognition Method Based on Recurrence Quantitation Analysis for Hydraulic Pump. Chin. Hydraul. Pneum. 2019, 02, 18–23. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Num. | Name | Model | Performance Parameters |
|---|---|---|---|
| 1 | Motor | Y132M-4 | Rated speed: 1480 rpm |
| 2 | Axial piston pump | MCY14-1B | Theoretical displacement: 10 mL/r rated pressure: 31.5 MPa; 7 pistons rated speed: 1500 rpm |
| 3 | Data acquisition card | USB-6221 | Maximum sampling rate: 250 kS/s |
| 4 | Vibration sensor | YD-72D | Frequency range: 0.3 Hz–18 kHz Charge sensitivity: 0.35 pC/(m/s2) Linear range of amplitude: 1000 m/s2 |
| 5 | Charge amplifier | DHF-10 | Maximum output voltage: ±10 V Gain: 0.1m V/pC–1 V/pC; Precision: < 1.5% |
| 6 | Pressure Sensor | SYB-351 | Measuring range: 0–25 MPa Precision: 0.2%; Output range: 0–5 V |
| 7 | Rotational speed measurer | LT-XSMP | Measuring range: 6–45000 rpm |
| Num. | States | Fault Setting Method |
|---|---|---|
| 1 | Normal working | --- |
| 2 | Single slipper wear fault | Grind off a rounded corner of the slipper |
| 3 | Single slipper loosing fault | Replace the normal components with a slipper loosing fault components |
| 4 | Center spring worn fault | Grind off the center spring by 1.2 mm |
| Method | IO | Number of IMF Components |
|---|---|---|
| EEMD | 0.2069 | 9 |
| MEEMD | 0.1131 | 6 |
| State | IMF1 | IMF2 | IMF3 | IMF4 |
|---|---|---|---|---|
| Normal working | 0.2102 | 0.0712 | 0.0374 | 0.0210 |
| Single slipper wear fault | 0.1156 | 0.0316 | 0.0151 | 0.0106 |
| Single slipper loosing fault | 4.7201 | 1.6651 | 1.3350 | 0.9085 |
| Center spring worn fault | 8.9050 | 3.5852 | 2.8181 | 1.6852 |
| Condition of Hydraulic Pump | Normal Working | Single Slipper Wear Fault | Single Slipper Loosing Fault | Center Spring Worn Fault | Total | |
|---|---|---|---|---|---|---|
| MEEMD–BP | Number of samples correctly diagnosed | 20 | 20 | 20 | 19 | 79 |
| Recognition accuracy | 100% | 100% | 100% | 95% | 98.75% | |
| MEEMD–SVM | Number of samples correctly diagnosed | 20 | 19 | 19 | 20 | 78 |
| Recognition accuracy | 100% | 95% | 95% | 100% | 97.5% | |
| MEEMD–ELM | Number of samples correctly diagnosed | 20 | 19 | 20 | 20 | 79 |
| Recognition accuracy | 100% | 95% | 100% | 100% | 98.75% | |
| MEEMD–WKELM | Number of samples correctly diagnosed | 20 | 20 | 20 | 20 | 80 |
| Recognition accuracy | 100% | 100% | 100% | 100% | 100% | |
| Fault Diagnosis Method | MEEMD–WKELM | MEEMD–ELM | MEEMD–SVM | MEEMD–BP |
|---|---|---|---|---|
| Training time (s) | 0.0020 | 0.0054 | 0.058 | 0.749 |
| Testing time (s) | 0.0011 | 0.0019 | 0.0067 | 0.0042 |
| Condition of Rolling Bearing | Normal Working | Inner Race Fault | Rolling Ball Fault | Outer Race Fault | Total |
|---|---|---|---|---|---|
| Number of samples correctly diagnosed | 20 | 20 | 20 | 20 | 80 |
| Recognition accuracy | 100% | 100% | 100% | 100% | 100% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Jiang, W.; Zhang, S.; Sun, Y.; Zhang, S. A Hydraulic Pump Fault Diagnosis Method Based on the Modified Ensemble Empirical Mode Decomposition and Wavelet Kernel Extreme Learning Machine Methods. Sensors 2021, 21, 2599. https://doi.org/10.3390/s21082599
Li Z, Jiang W, Zhang S, Sun Y, Zhang S. A Hydraulic Pump Fault Diagnosis Method Based on the Modified Ensemble Empirical Mode Decomposition and Wavelet Kernel Extreme Learning Machine Methods. Sensors. 2021; 21(8):2599. https://doi.org/10.3390/s21082599
Chicago/Turabian StyleLi, Zhenbao, Wanlu Jiang, Sheng Zhang, Yu Sun, and Shuqing Zhang. 2021. "A Hydraulic Pump Fault Diagnosis Method Based on the Modified Ensemble Empirical Mode Decomposition and Wavelet Kernel Extreme Learning Machine Methods" Sensors 21, no. 8: 2599. https://doi.org/10.3390/s21082599
APA StyleLi, Z., Jiang, W., Zhang, S., Sun, Y., & Zhang, S. (2021). A Hydraulic Pump Fault Diagnosis Method Based on the Modified Ensemble Empirical Mode Decomposition and Wavelet Kernel Extreme Learning Machine Methods. Sensors, 21(8), 2599. https://doi.org/10.3390/s21082599