1. Introduction
As a new non-contact measurement method, the 3D laser scanning technique obtains the coordinates of the points in a scanned object by using the triangle measurement based on the distance from the scanning device to the scanned points and the angle of the reflected light [
1,
2,
3]. Compared to the traditional measuring technique, such as manual measurement or visual inspection, laser scanning technique shows the advantages of safe operation, accurate measurement, and high efficiency, which becomes the promising technique for pavement detection [
4]. However, like other measuring methods, the result of laser scanning inevitably contains noise points that do not belong to the pavement, which adversely affects the 3D reconstruction of pavement as well as the defect identification in the later stage. The causes of noise points are various [
5,
6], including the environmental interference (such as dust in the air), the foreign body, the sharp changes of laser incidence angle, etc.
Cao [
7] classified noise points into three categories: scattered noise points deviating from the target object, less dense noise points deviating from the target object, and noise points mixed with the target object. For pavement point cloud, noise points can also be divided into these three categories. Because of the strong planarity feature of pavement, noise points are all above this pavement plane. These noise points need to be identified and eliminated by using the specific algorithms. The process of identification and elimination of noise points is called denoising process [
8]. However, limited by the scanning principle and the equipment of the 3D laser scanning, the point cloud data includes only the coordinates and the RGB values of each point, which makes the denoising process difficult because the topological connection between points are not included [
9].
The traditional denoising algorithms include robust filtering [
10,
11], median filtering [
12], mean filtering [
13], least squares algorithms [
14], and so on. Based on the traditional algorithms, some new denoising algorithms have been proposed to eliminate noise points more accurately and quickly. Liu et al. [
15] proposed a robust denoising algorithm based on the kernel density estimation clustering algorithm to eliminate the surface noise points of the general 3D point cloud and to achieve the efficient and fast denoising. Mattei et al. [
16] proposed the motion robust principle component analysis (MRPCA) to denoise 3D point cloud and at the same time retain the sharp characteristics of the point cloud data by dividing the denoising process into the local and the global parts. Rakotosaona et al. [
17] proposed a deep-learning-based approach for estimating the local 3D shape properties of point clouds, which shows good robustness and effectiveness when dealing with the surface noise points. The above algorithms are aimed at denoising the general 3D point cloud data, of which some algorithms were applied to denoise the pavement point cloud data [
18]. However, the contributions of each coordinates of the scanned points of pavement are equally treated by these algorithms during the denoising process, which ignores the strong planarity feature of the pavement point cloud data. It is possible that these algorithms even treat the foreign body (such as kerbs or stones on the pavement) as part of the pavement or cause the defects over-smoothened, which results in the precision loss of the 3D reconstruction.
In view of the denoising problem caused by applying the traditional algorithms, the algorithms aimed at denoising the pavement 3D point cloud data has been proposed. Wang [
19] proposed a multi-level denoising model to ensure the accuracy of the crack identification in the later stage by adding some adaptive supplements to improve the feasibility of algorithms. Vosselman [
20] proposed the maximum local slope filtering algorithm, which mainly utilizes the slope of different cloud blocks to identify noise points. Petzold et al. [
21] proposed the moving window least squares fitting algorithm, which fits the surface according to the lowest point of each window and eliminates the points with distance to the surface exceeding the threshold. Liu et al. [
22] proposed a denoising algorithm for pavement point cloud data by a vehicle-borne scanner. The noise points are identified and eliminated through the cluster analysis. Hu et al. [
23] proposed a denoising algorithm based on the deep learning, which distinguishes the ground points from the non-ground points by deep convolution neural network. Although the above algorithms took the strong planarity feature of the pavement into account, the parameters in their algorithms need to be manually adjusted many times for an ideal denoising result, which increases the program complexity. Lin et al. [
24] proposed a segmentation based-filtering algorithm (SBF), which can identify and eliminate the pavement noise points by point cloud segmentation, multi-echo analysis, and iterative judgment. Qiu et al. [
25] utilized the neighborhood to eliminate the scattered noise points. Liu et al. [
22] and Qiu et al. [
25] mainly aimed at denoising vehicle scanned point cloud. The density and accuracy of the scanned points are greatly affected by the vehicle speed and the road condition, which makes these algorithms not suitable for denoising the point cloud data obtained under high accuracy measurement.
To highlight the contribution of the horizontal coordinates of the pavement points, this study utilizes the characteristic of the oblate ellipsoid of which the equatorial radius is larger than the polar radius to denoise the data points of pavement with strong planarity feature. Moreover, the point cloud is divided into cells before the ellipsoid detection to narrow down the space of the ellipsoid detection and to save computing time. The rest of this paper is organized as follows.
Section 2 introduces the theory of the denoising algorithm proposed in this study.
Section 3 and
Section 4 are the numerical analysis of
Section 2, including the meshing stage and the ellipsoid detection, respectively. The algorithm verifications by using both the simulated and the scanned point cloud are presented in
Section 5. Finally,
Section 6 concludes the paper.
2. Theory of Denoising Algorithm
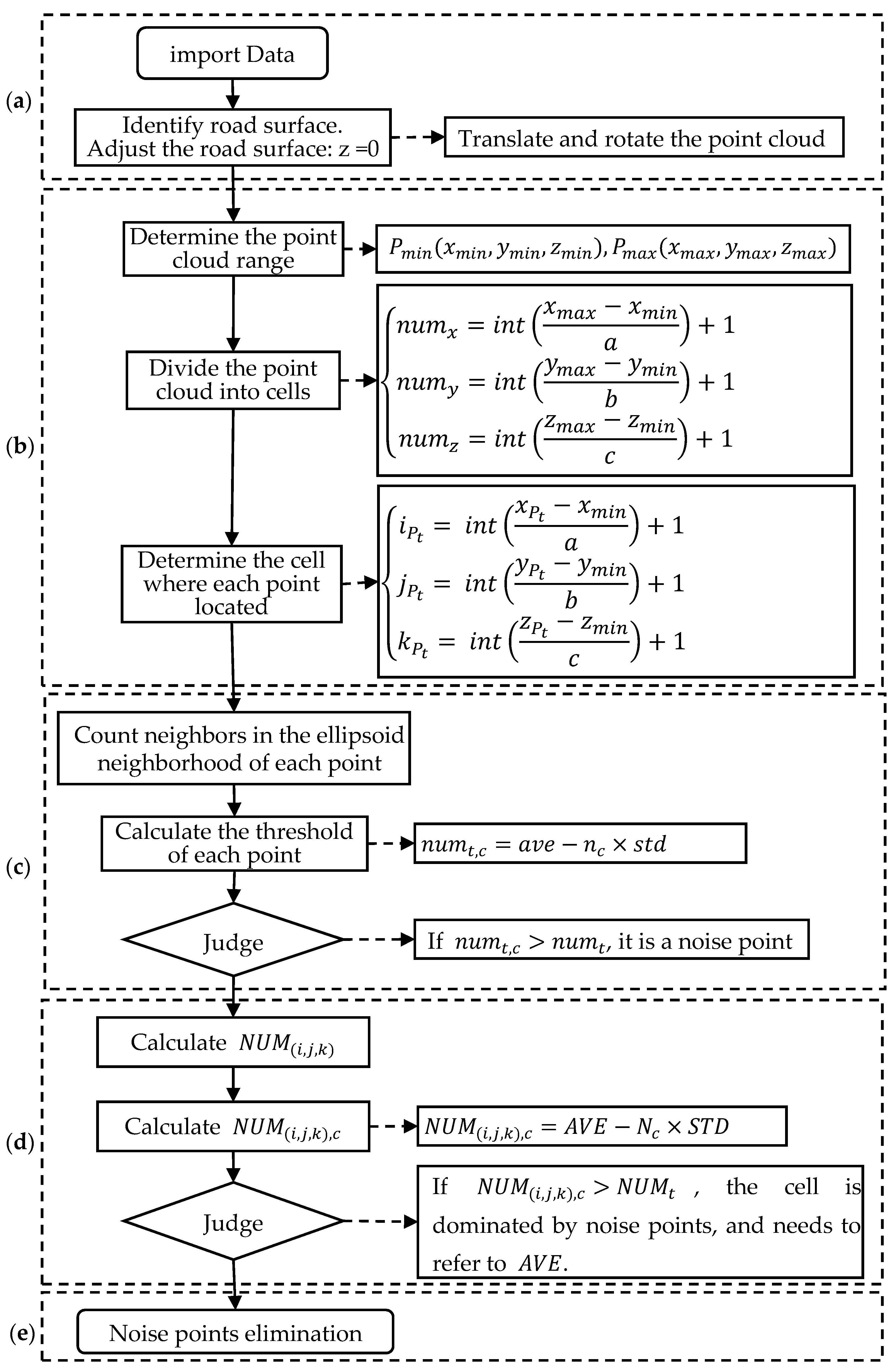
A denoising algorithm for pavement points cloud data is proposed based on the cell meshing ellipsoid detection in this study (
Figure 1). Considering the planarity feature of pavement surface, this denoising algorithm utilizes the ellipsoid detection to highlight the contribution of the horizontal coordinates to the threshold of the denoising. In detail, an ellipsoid neighborhood for each point is constructed, and the number of the neighbors in this neighborhood is counted. Based on the normal distribution principle, each point has its threshold which distinguishes if this point is a noise point or not. A point will be identified as a noise point if the number of neighbors in its ellipsoid neighborhood is less than the threshold.
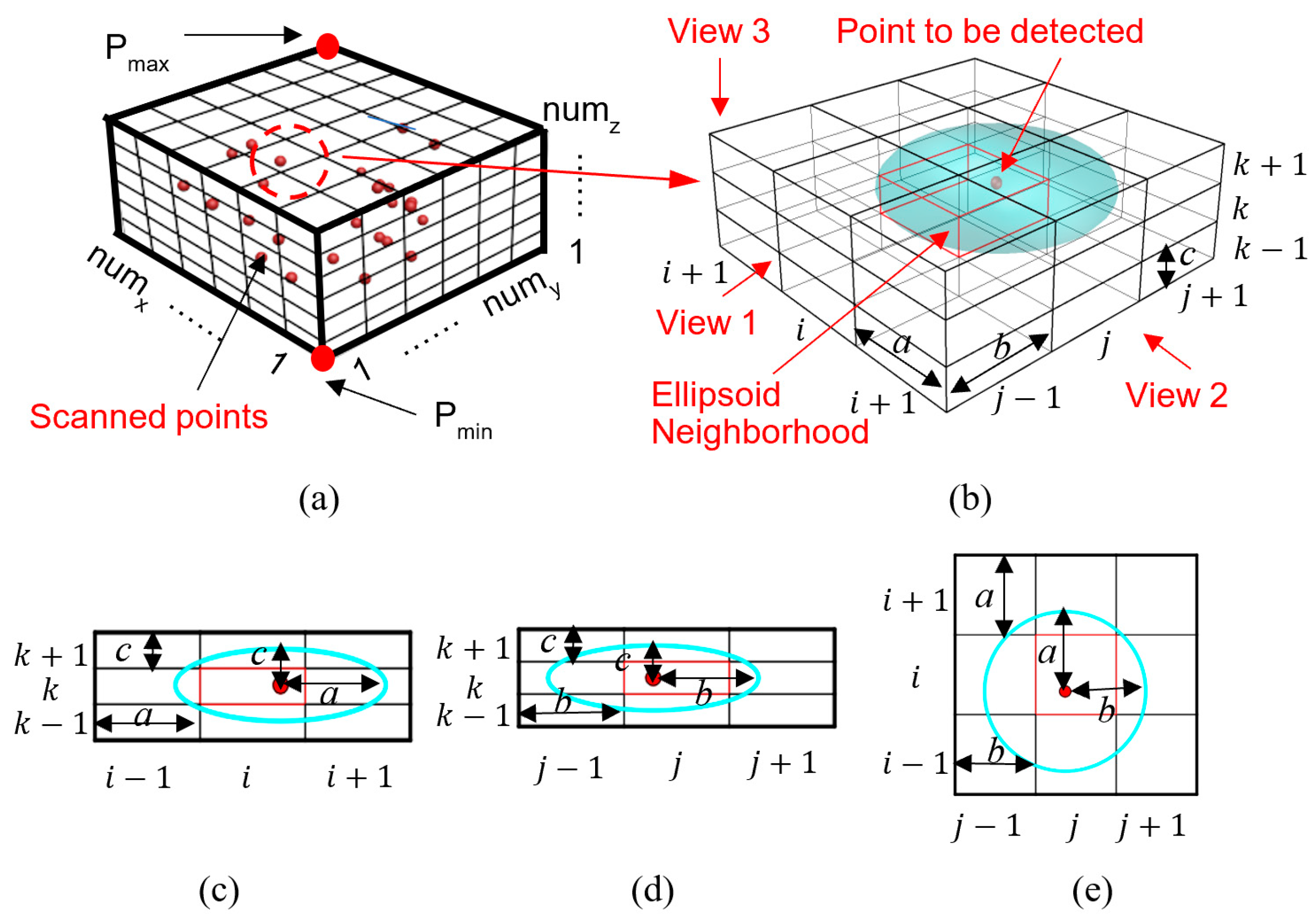
Moreover, this study divides the entire point cloud into cells before denoising to reduce the spatial range of the ellipsoid detection for higher denoising efficiency. The point to be detected is the center point of its ellipsoid neighborhood, of which the neighbors are counted. Because the width and the length of the gird equal to the equatorial radius of the ellipsoid and the height of the gird equals to the polar radius of the ellipsoid, the ellipsoid neighborhood fits in 27 cells (3 × 3 × 3) (
Figure 2). Thus, the ellipsoid detection is conducted in both the cell where the point is located and its surrounding cells. This operation effectively reduces the computing time due to the narrow down of the detection space. The detailed process is discussed as follows (as shown in
Figure 1).
(a) Preparation stage: To stress the strong planarity characteristic of pavement in the denoising process, the pavement plane is firstly identified by utilizing the visualization software, such as Geomagic Studio 2012. The identified pavement plane is then represented by a horizontal plane (the x–y plane with z = 0), and the normal direction of the pavement plane denotes the height direction (z-axis direction).
(b) Cell meshing stage: As shown in
Figure 2a, the point with the smallest
x,
y,
z coordinates among all points are denoted as
, and the point with the largest
x,
y,
z coordinates among all points are denoted as
. All points are distributed in the cuboid space with the diagonal vertices of
and
, and the cuboid edges are along the
x-axis,
y-axis, or
z-axis direction. The point cloud is then divided into cells. The length and width of the cell are equal to the equatorial radius of the ellipsoid, and the height of the cell is equal to the polar radius of the ellipsoid. The known pavement plane is at
z = 0, and it is assumed that the ground points is distributed within an extremely limited range along the height direction. Therefore, the points will be considered as noise points and to be eliminated if they locate in cells far from the pavement plane.
(c) Ellipsoid detection stage: The ellipsoid detection is done for each point in the cloud to detect if one point is a noise point. The denoising critical value of one point should be first determined to judge whether this point is a noise point, and the detailed process is as follows. The number of neighbors in the ellipsoid neighborhood of
(
is the
tth point in the point cloud) is denoted as
. Its neighbors are denoted as
, and the number of neighbors in the ellipsoid neighborhood of
is denoted as
. The denoising critical value of
is denoted as
, which is calculated according to the average value (
ave) and the standard variance (
std) of the array
, as shown in Equation (1). If
<
,
will be identified as a noise point. Parameter
is used to control the denoising degree. If the array
obeys the normal distribution, the probability that
is a noise point is 99.87% when
= 3 and
<
. When the scanned data is sufficient,
can be reduced to increase the denoising critical value (
) to eliminate more potential noise points but possibly eliminate some ground points as well.
(d) Comparing stage: The comparison of the types of majority points in different cells is done to eliminate the remained noise points after stage (c). This stage applies to the situation that most points in one cell are noise points, and thus the critical value calculated in stage (c) is small. This small critical value may not be able to judge whether a point is a noise point. Therefore, to identify the cells containing mainly noise points, the comparison of the average number of neighbors in the ellipsoid neighborhood of each point from different cells is carried out. The identification principle is illustrated below.
As shown in
Figure 2a,
i,
j, and
k are the cell sequence numbers along
x-axis,
y-axis, and
z-axis direction, respectively. For cell
G(
i,
j,
k), the mean value of all internal points’ number of neighbors is taken as the eigenvalue of the cell, which is denoted as
. The critical value
of cell
G(
i,
j,
k) is calculated according to the average value (
AVE) and the standard variance (
STD) of the eigenvalues of the surrounding cells (i.e.,
G(
i±△
i,
j±△
j,
k±△
k), △
i = −1, 0, +1; △
j = −1, 0, +1; △
k = −1, 0, +1, and they are not 0 at the same time), as shown in Equation (2). Parameter
is used to control the denoising degree. Similar to the determination of
in Equation (1)
, if the array
obeys the normal distribution, the probability that
G(i, j, k) is a cell in which most points are noise points is 99.87% when
= 3 and
<
. Therefore, the critical value of each point inside the cell
G(
i,
j,
k) will all be increased from
(calculated in stage c) to
to avoid the occurrence of a small critical value determined by Equation (1).
(e) Ending stage: The denoising result can be obtained after noise points have been identified and eliminated, and then the 3D reconstruction can be done. The feasibility of the denoising algorithm in terms of theoretical analysis will be discussed below.
3. Discussion of Cell Meshing Stage
3.1. Significance and Construction of Cells
This study proposes the approach of ellipsoid detection to distinguish noise points, and the neighbors in the ellipsoid neighborhood of each point need to be obtained first. However, if all points are checked to see if they are in the ellipsoid neighborhood, the program complexity will be greatly increased, given the huge amount of points. Therefore, the ellipsoid detection should be carried out in the partial space of the 3D point cloud by dividing the point cloud into cells, and the ellipsoid detection is carried out in the partial space composed of cells, as shown in
Figure 2b.
For each point, the ellipsoid detection is carried out within both the cell that the point belongs to and its surrounding cells. At most 27 surrounding cells are involved during the ellipsoid detection, the inner cell has 27 surrounding cells, and the cells at the circumferences has less than 27 surrounding cells. As illustrated in
Figure 2c–e, the point for the ellipsoid detection is represented by the red point, and its ellipsoid neighborhood locates at its surrounding cells. To detect the points belonging to the boundary of the target area, the target area is enlarged by a cell size in the horizontal direction when conducting the ellipsoid detection. The points in the added cells serve as the reference to determine the critical value of the boundary points.
The number of cells along the x-axis, y-axis, and z-axis direction is denoted as and , respectively. If each cell has n points, there are total points in the point cloud. If each point in the point cloud needs to be detected, total detections are required. After the point cloud is divided into cells, only the points in the surrounding 27 cells are checked, and only 27 × n detections are required, and the denoising time will be reduced by times compared to that without cell construction. Therefore, the cell meshing operation can greatly reduce the computing time.
The detailed cell meshing process is as follows:
(a) The coordinates of and are determined.
(b) The number of cells along
x-axis,
y-axis or
z-axis direction is calculated by Equation (3), and the output of int(input) is the integer part of the input.
(c) Assuming
is the
tth point, its
x,
y, and
z coordinates are
,
and
, respectively. The cell where
. is located is denoted as
, and
,
and
are the sequence numbers along the
x-axis,
y-axis, and
z-axis direction, respectively.
,
and
are determined by Equation (4). Particularly,
,
and
are 1, and
,
and
are
,
and
, respectively.
After the above cell meshing process, the cell where each point is located is determined. To further simply the ellipsoid detection and reduce the computing time, pre-denoising can be done to eliminate some obvious noise points, and the details are discussed in the next section.
3.2. Pre-Denoising Point Cloud
Some obvious noise points can be eliminated in advance by utilizing the relationship between the cells. The ground points approximately make up a plane located at the bottom of the point cloud; therefore, these ground points are distributed at the bottom cells. By utilizing this feature, we can eliminate some noise points before the ellipsoid detection.
The detailed pre-denoising process is as follows:
(a) For i from 1 to numx and for j from 1 to numy, points are detected from the bottom cell to the top cell (for k from 1 to numz). The value of k when the point is detected for the first time is denoted as .
(b) Because the z-coordinates of the ground points vary in a small range, it can be inferred that the points in the cell that are over a critical height from G are all noise points. This critical height is denoted as , which is a positive integer and determined from the z-coordinates change of the ground points and the size of the cell. That is all points in the are treated as noise points.
(c) is compared to that of the surrounding cells () ( = −1, 0, +1. = −1, 0, +1. and cannot equal to 0 at the same time). If the difference () is larger than , it is considered that the points in are much higher than the points in , and thus, all points in need to be eliminated. After this operation, the point cloud is pre-denoised.
4. Analysis of Ellipsoid Detection
The ellipsoid detection method is proposed in this study to distinguish both the scattered noise points and the foreign body noise points from the ground points, which highlights the contribution of the horizontal coordinates of the scanned points to the denoising threshold. The influencing factors, including the ellipsoid shape, the distance from the point to the pavement, and the included angle between the foreign body and the pavement, will be analyzed to find out the appropriate ellipsoid shape for denoising.
Before the detailed analysis, the following assumptions are made for simplifying the numerical analysis:
(a) Within a small space, the ground points or the foreign body noise points are evenly distributed. The number of the neighbors in one point’s ellipsoid neighborhood is proportional to the intersection area between the pavement plane and the ellipsoid neighborhood or the intersection area between the foreign body plane and the ellipsoid neighborhood.
(b) The z-coordinates variation of the ground points is limited in a small range and can form a plane within a small area of 0.40 m × 0.40 m in this study, as expressed in Equation (5).
(c) By assuming , the influence of x and y coordinates on the denoising results is unified. a and b are the equatorial radiuses of the ellipsoid neighborhood.
(d) To simplify the later calculation, the polar radius of the ellipsoid neighborhood c is fixed as 1 mm. Because the equatorial radius of the oblate ellipsoid is larger than the polar radius of the oblate ellipsoid, it has and .
(e) The vertical distance (or height) from the point to be detected to the pavement plane is denoted as . Since c = 1 mm, when , there exists ground points in the ellipsoid neighborhood of the point. When , there is no ground points in the ellipsoid neighborhood of that point.
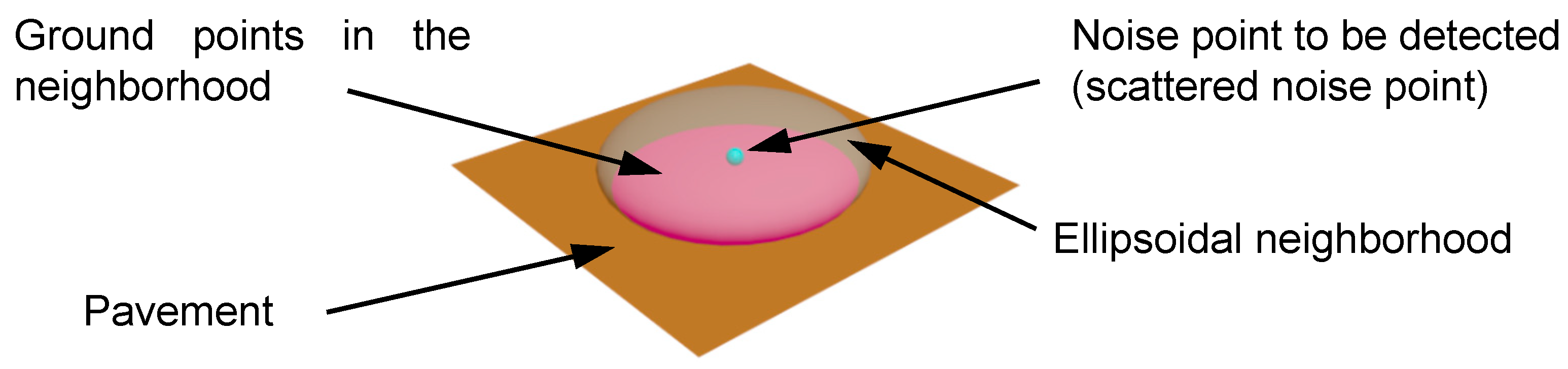
Figure 3 shows the obtained point cloud consisting of ground points, the scattered noise points, and the foreign body noise points. To verify the effectiveness of the ellipsoid detection in distinguishing different types of noise points, the detailed calculation is made to obtain the different intersection areas in the ellipsoid neighborhood of the scattered noise point, the foreign body noise point, and the ground point. The denoising ability of the ellipsoid detection can be quantified by the intersection area.
4.1. Sensitivity Analysis for Detecting Scattered Points
Since the density of the scattered points is far less than that of the ground points, the scattered points cannot form a plane. Therefore, the intersection area between the pavement plane and the ellipsoid neighborhood of the scattered points is actually part of the pavement plane, as the pink area shown in
Figure 3. To discuss the denoising ability of the ellipsoid detection for the scattered points, this intersection area is numerically calculated and compared with that of the ground point.
To detect if a scattered points
is a noise point or not, the coordinates of this point are set as (0,0,0) for the convenience of calculation. Its height from the pavement plane is denoted as
. The equation of the ellipsoid neighborhood of
is expressed as:
By combining Equations (5) and (6), the equation of the intersection area between the ellipsoid neighborhood of
and the pavement plane is shown as Equation (7), where the constant value in the Equation (5) is
.
The denoising ability of the ellipsoid detection can be quantified by the intersection area. The smaller the intersection area, the more likely the point to be detected is a noise point. However, the intersection areas of the ellipsoid neighborhood of the scattered point and that of the ground point are different. For example, the intersection area between the pavement plane and the ellipsoid neighborhood of the scattered points is
mm
2 (the pink zone shown in
Figure 3) by Equation (7). For ground point, its intersection area between the pavement plane and the ellipsoid neighborhood of this point is
mm
2. Therefore, a normalization of the intersection area aiming to eliminate the impact of the ellipsoid shape should be done to conveniently compare and analyze the denoising sensibility of the ellipsoid detection.
The normalization process is conducted through dividing the intersection area of the ellipsoid neighborhood of a scattered point by the intersection area of the ellipsoid neighborhood of a ground point. The normalized result equals to
, which is denoted as
Sscatter, as shown in Equation (8).
It is specified in this study that a scattered point will be easily identified as a noise point if its is less than 0.5. From Equation (8), Sscatter < 0.5 if d > 0.71 mm; that is, the number of neighbors in the neighborhood of the scattered points is less than half of that in the ground point’s neighborhood, and thus the point is detected as a scattered noise point.
The influence of c (the ellipsoid polar radius, along z-axis direction) is revealed that the points within the distance of 0–0.71c from the pavement plane can be accepted as the ground points. This is because c equals to 1 mm by assumption to simplify the calculation in the above analysis, and therefore, by adjusting the value of c, the accepted distance from the pavement plane within which the scattered points can be regarded as the ground points can be controlled to a relatively small value to eliminate more scattered noise points and to maintain the ground points.
4.2. Sensitivity Analysis for Detecting Foreign Body Points
Affected by the scanning environment, foreign body such as stones, kerbs, and branches on the pavement may be scanned, and these scanned noise points should also be eliminated. Unlike the scattered points, the foreign body points are dense and mixed with the ground points. Therefore, the number of neighbors in the ellipsoid neighborhood of the ground points and that of the foreign body points can be represented by their intersection area, respectively.
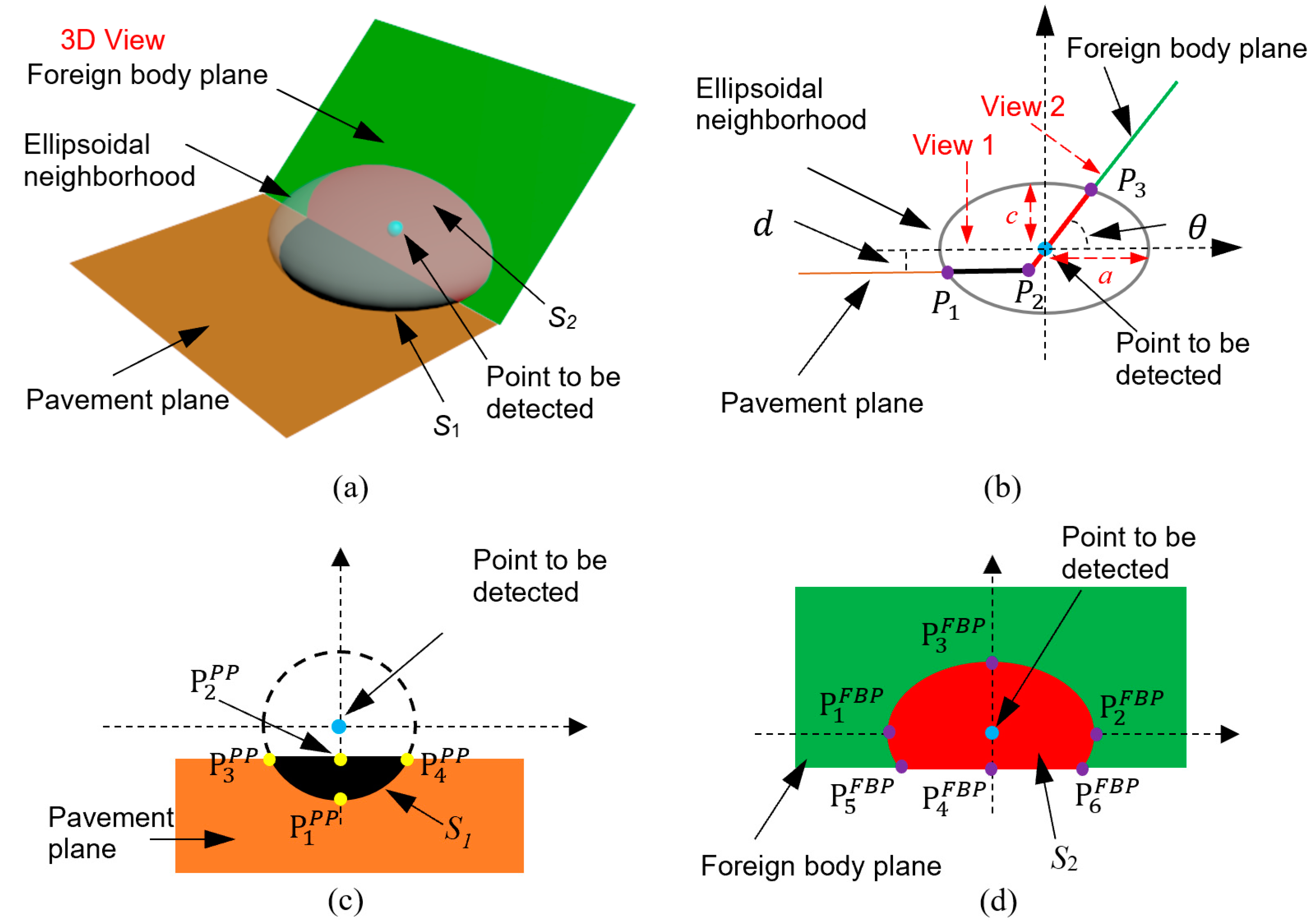
4.2.1. Constructing Ellipsoid Neighborhood for Foreign Body Points
As shown in
Figure 4a, the local foreign body surface can be treated as a plane when the ellipsoid is small. The intersection area between the ellipsoid and the pavement plane is denoted as
, and the intersection area between the ellipsoid and the foreign body is denoted as
. The point to be detected whether a foreign body noise points or a ground point is located in the center of its ellipsoid neighborhood. The distance from the point to the pavement is
d (
Figure 4b). The included angle between the foreign body and the pavement is denoted as
.
is denoted as
k to simplify calculation.
Figure 4b is the side view of
Figure 4a, and the location of the point to be detected is treated as the origin of the coordinate system. The equations of ellipsoid, the pavement plane, and the foreign body plane shown in
Figure 4b are expressed as Equation (9), Equation (10) and Equation (11), respectively:
As shown in
Figure 4b,
is the intersection point of the ellipsoid and the pavement plane. By combining Equations (9) and (10), the coordinates of
are calculated as
.
is the intersection point of the pavement plane and the foreign body plane. The coordinates of
are obtained as
by combining Equations (10) and (11).
is the intersection point of the ellipsoid and the foreign body plane, with coordinates of
obtained by combining Equations (9) and (11). The intersection areas of
and
can be calculated from the coordinates of
,
and
, which are used to further calculate the total intersection area for sensitivity analysis of detecting foreign body noise point.
4.2.2. Calculation of
is the intersection area between the pavement plane and the ellipsoid neighborhood of the foreign body point to be detected. The sketch of
on the pavement plane is shown in
Figure 4c. Critical points such as
,
,
,
and
are labelled on
Figure 4c, and their coordinates are calculated as follows.
(a)
in
Figure 4c is corresponding to
in
Figure 4b. The coordinates of
are
in
Figure 4c.
(b)
in
Figure 4c is corresponding to
in
Figure 4b. The coordinates of
are
in
Figure 4c.
(c) By substituting
into Equation (7) (the equation for calculating the projection of the ellipsoid on the pavement plane), the coordinates of
and
are obtained as
and
respectively, in
Figure 4c. If
, it means that the distance from the foreign body point to be detected to the pavement plane is so far that there is no ground point in the ellipsoid neighborhood. In this situation,
and
do not exist and
mm
2.
By utilizing Equation (7) and the coordinates of
and
,
(mm
2) can be determined as shown in Equation (12).
4.2.3. Calculation of
is the intersection area between the foreign body plane and the ellipsoid neighborhood of the foreign body point to be detected, the sketch of
on the foreign body plane is shown in
Figure 4d. To calculate
, the projection of the foreign body point to be detected on the foreign body plane (FBP) is treated as the origin of the coordinate system in
Figure 4d. Critical points such as
,
,
,
,
, and
are labelled on
Figure 4d, and their coordinates are calculated as follows.
(a) Because the red area in
Figure 4d is a section of the ellipse with the length of the semi-major axis of
a,
and
can be obtained.
(b)
in
Figure 4d is corresponding to
in
Figure 4b. Considering the projection angle (
θ, k = tanθ), the coordinates of
are calculated to be
.
(c)
in
Figure 4d is corresponding to
in
Figure 4b. Considering the projection angle (
θ), the coordinates of
are calculated to be
.
(d) By combining the line equation
and the ellipse equation constructed by
,
and
, the coordinates of
and
are calculated to be
and
, respectively, in
Figure 4d.
Above all,
(mm
2) can be determined as shown in Equation (13). If there is no ground point in the ellipsoid, the lower bound of integral in Equation (13) will be replaced by
, which means the
S2 area is a complete ellipse.
The total intersection area in the ellipsoid neighborhood of the foreign body point to be detected is
plus
, which is compared to the intersection area in the ellipsoid neighborhood of the ground point to analyze the denoising ability of the ellipsoid detection. Therefore, the total area is divided by the area of
mm
2, and the normalized area (
Sforeign body) is determined by Equation (14). It is seen that
Sforeign body is influenced by the ellipsoid parameter
, the included angle (
), and the distance from the foreign body point to be detected to the pavement plane (
d).
4.2.4. Sensitivity Analysis of Detecting Foreign Body Noise Point
A point is detected to be a foreign body noise point if the calculated
Sforeign body < 0.5.
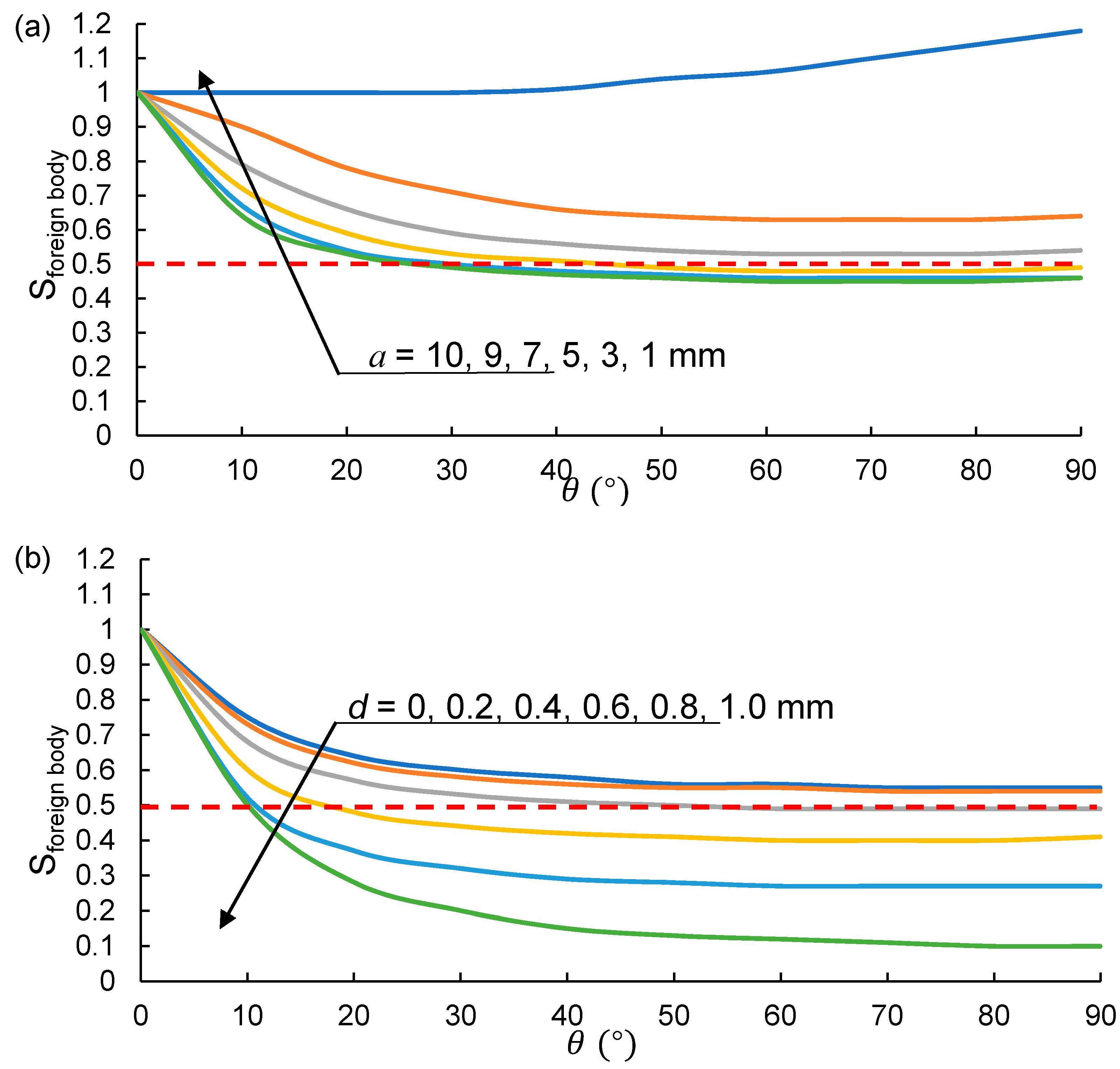
Figure 5 shows the relationship between the
Sforeign body and the ellipsoid parameter
,
and
d. In
Figure 5a,
d is fixed as 0.5 mm, and
c = 1 mm. It is found that
Sforeign body is always around 1 with the increase of
(when
a =
c = 1 mm corresponding to a spherical detection). It is concluded that the spherical detection cannot denoise the foreign body points, because
Sforeign body < 0.5 is required to detect a point as a foreign body noise point.
On the other hand,
Sforeign body decreases with the increase of
and
a (when
>
c = 1 mm). However, the increases of
shows the limited effect on
Sforeign body. The
Sforeign body begins to drop below 0.5 until that
is greater than 9 mm. Therefore,
a is fixed as 10 mm in
Figure 5b for the purpose of investigating the effect of
d on
Sforeign body. From
Figure 5b, it is found that
Sforeign body is less than 0.5 when the ellipsoid parameter
is taken as 10 mm with
d > 0.6 mm and
> 20°, which has a good distinction between foreign body noise points and ground points.
Moreover, c (the ellipsoid polar radius) equals to 1 mm in the assumption to simplify the calculation, and the distance from the foreign body point to the pavement plane is actually from 0 to 0.60c. By reduce the value of c, the accepted distance from the pavement plane can be controlled to a relatively small value to eliminate more foreign body noise points and ground points far from the pavement.
4.3. Sensitivity Analysis of the Ellipsoid Detection
Table 1 illustrates the normalized total intersection area and the sensitivity to the influencing factors for the three types of points. For the ground point, the total intersection area in its ellipsoid neighborhood remains unchanged. For the scattered noise point, the total intersection area in its ellipsoid neighborhood is less than half of that of the ground points when its distance from the pavement plane (
d) is greater than 0.71
c, and it is identified a noise point and to be eliminated. For the foreign body noise point, the total intersection area in its ellipsoid neighborhood is less than half of that of the ground points under the conditions of
a equals to 10
c, the angle between the foreign body and the pavement is less than 160° (
), and its distance from the pavement plane (
d) is greater than 0.6
c.
6. Conclusions
The conventional 3D point cloud denoising algorithm emphasizes on improving the smoothness of the point cloud, however, ignores the horizontal characteristics of the pavement, which makes it difficult to eliminate the foreign body noise points and the scattered noise points close to the pavement plane. Meanwhile, the conventional denoising algorithm is lack of the cell meshing process and demands for calculating the distance between any two points, making the computing time very long. In this study, a new denoising algorithm based on the cell meshing ellipsoid detection is proposed, which reduces the computing time and highlights the contribution of horizontal coordinates to the critical value of denoising. To confirm the accuracy and efficiency of the proposed algorithm, the ellipsoid detection difference between the ground points, the scattered noise points and the foreign body noise points is theoretically analyzed. The ellipsoid detection algorithm is then quantitatively verified by the simulated point cloud and the practically scanned pavement point cloud, and the comparison is finally conducted between the ellipsoid neighborhood detection and the traditional spherical neighborhood detection.
It is found that the denoising algorithm based on the cell meshing ellipsoid detection enlarges the contribution of the horizontal coordinates for distinguishing noise points. c/a, hc, nc, and Nc are the denoising parameters, in which and Nc are used to control the denoising degree determined by Equations (1) and (2). By reducing the denoising parameters (c/a, hc, nc, and Nc), more foreign body noise points and ground points may be eliminated, because the critical value is increased. Compared to the traditional spheroid neighborhood detection, the ellipsoid detection can better eliminate the scattered noise points close to the pavement plane and the foreign body noise points. At the same time, the cell meshing procedure reduces the computing time by reducing the spatial scale of the ellipsoid detection.
The proposed algorithm is an improvement based on the spherical neighborhood detection of the ordinary object denoising algorithm. It can quickly and efficiently eliminate the scattered noise points. In addition, it has a good denoising effect on the foreign body noise points such as the stones and the kerbs. This algorithm can provide a practical, accurate and efficient way of processing point cloud for the later 3D reconstruction of pavement and defect identification.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}